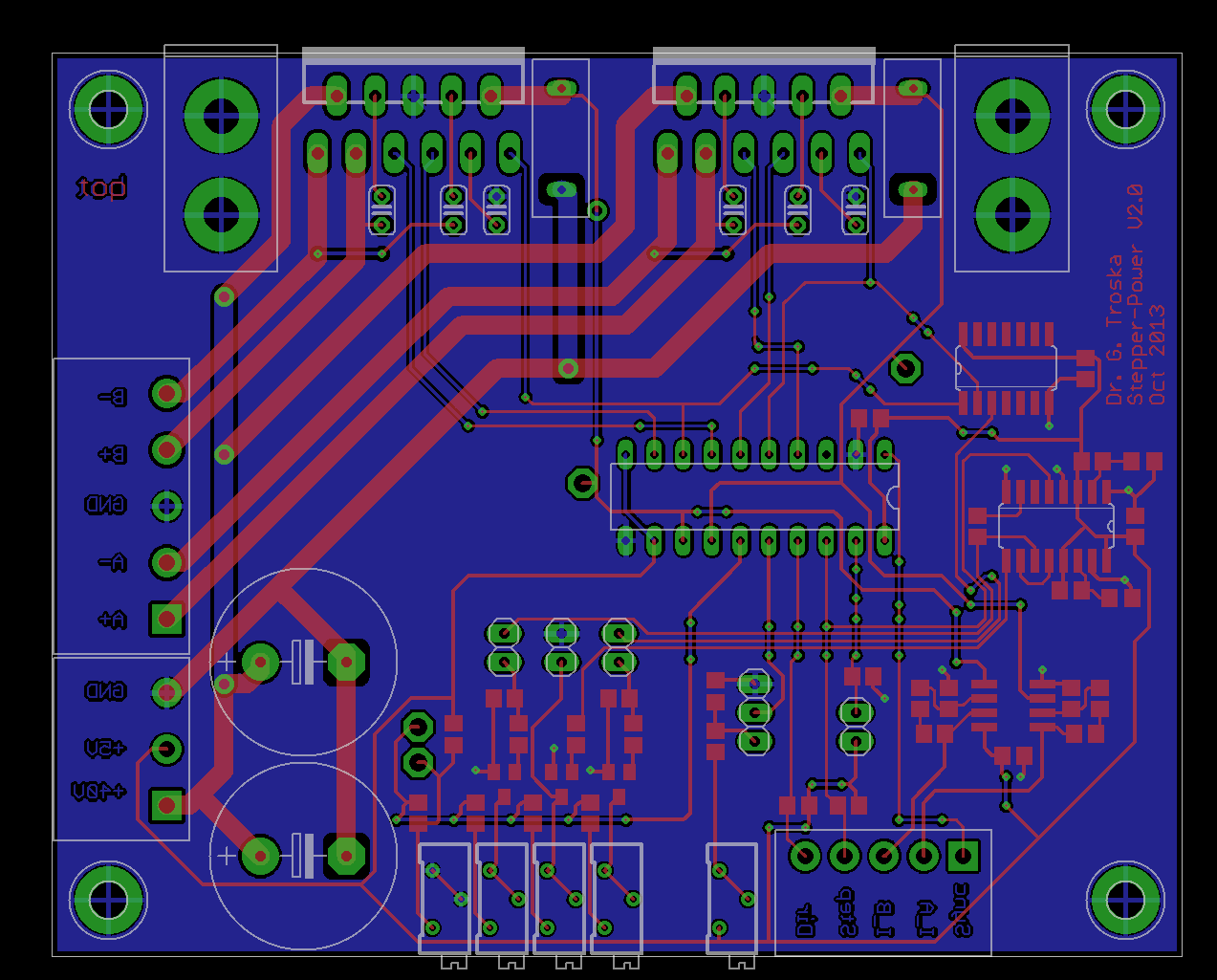

Hallo zusammen, ich würde gerne hier mein neues Schaltungslayout einer Schrittmotorleistungselektronik vorstellen. Als sich die Karte noch in der "Entwicklungsphase" befand wurden sehr viele Fragen hier beantwortet: Beitrag "L6203 choppt, aber auch ohne Last?" Hier ist jetzt die neue Karte mit den besprochenen Features: Die Schaltung besteht aus zwei L6203 und einem L297. Weiterhin wurden Elemente zum Einstellen des Stroms ergänzt: So existiert eine Sleep-Funktion (Stromabsenkung während des Stellstands), eine Boost-Funktion (Stromanhebung während der ersten Schritte) sowie eine Stromabsenkung, wenn beide Phasen im Half-Step-Modul aktiv sind. Zusätzlich wird der momentane Strom beider Phasen durch einen Spannungsfolger ebenfalls als Spannung-Signal auf eine Leitung gegeben. Habe mir Mühe gegeben das Grounding des Leistungsteils vom restlichen Grounding zu separieren. Ich bin mal gespannt was ihr sagt. Bin für alle Verbesserungsvorschläge und Anmerkungen dankbar. Habe vor die Platine in den nächsten Tage in Auftrag von geben Danke und Gruß Schorsch
Angehängte Dateien:
-

stepper-V2.0-brd.png
50 KB -

stepper-V2.0-sch.png
52 KB
R19 erscheint mir zu hochohmig und ist bei SLEEP ja auch nciht dabei. Insgesamt find ich die creation of vref zu aufwändig, einfach die CMOS-Ausgänge mit Festwiderständen (die man sich aussuche kann) und eventuell Dioden mischen.
Mit welcher Frequenz läuft denn das Ganze? Mir persönlich sind die Leitungen vom Treiber bis zu den Anschlüssen über die halbe Platine ein wenig zu lang.
Hallo, R19 mit 100k Ohm ist natürlich ein Copy & Paste Fehler, eigentlich können hier 0 Ohm rein Vref habe ich extra etwas aufwändiger gestaltet, der Motor läuft damit deutlich ruhiger, insbesondere die Stromabsenkung, wenn alle beide Phasen laufen hat das "Rattern" reduziert. Die Widerstände im RC Netzwerk des Choppers sind auch noch nicht richtig dimensioniert, muss mal schauen, was ich in meiner Steckplatine momentan drin habe, ich denke sowas um 20kHz, man muss C ausreichend klein (ich glaube 2.2 oder 3.3n) machen, damit die Stromreglung funktioniert. Außerdem ist mir aufgefallen, dass die Motorspannung ausreichend groß sein muss, sonst pfeifts. Ich halte es für ziemlich egal, ob die Leitungen zwischen Stecker und Treiber, oder zwischen Motor und Stecker lang sind. Erstmal ist die ganze Platine nur 80x100mm, und außerdem sind die Leitungen meiner Meinung nach so gut wie möglich entkoppelt. BTW Was haltet hier davon, GND für die Motoren von GND für die Logikkomponenten über eine Ferritkernspule voneinander zu trennen? Als Netzteil habe ich einen fetten Ringkerntrafo mit 2x15V 300W gekauft, wollte mit den vollen 30V AC die "Grätsche" machen und mit 22mF glätten, sollten etwa 40V DC U_eff rauskommen, ich rechne mit weniger als 5% Brummanteil. Ich überlege noch die Spannungsversorgung für die Logikelemente mit 7805ern einzeln pro Platine zu machen, oder nur einen für alle zu benutzen Schorsch
:
Bearbeitet durch User
Hallo nochmal, ich überlege gerade ob es möglicherweise besser wäre die Massefläche unterhalb der stromführenden Leitungen ganz weg zu lassen... was meint ihr? Schorsch
Angehängte Dateien:
-

stepper3.png
45 KB

Hallo Schorsch, folgende Punkte gibt es zu Überdenken: Der L297 soll die Spannung an den Shunts messen (sense). Damit das gut funktioniert, ist eine kurze Masseführung essentiell. Sternmasse ist hierfür nicht geeignet! Masse der L297 muss möglichst direkt mit Gnd der Sense-Rs verbunden sein. So wie Du das Layout gemacht hast, sind die langen Gnd-Leitungen inkl. R und parasitärem L in die Messungen eingeschlossen. Die Sense-Rs müssen non-inductive-Typen sein! Da Du den Luxus einer Gnd-Plane hast, nutze ihn und verwende die Fläche für alles (Power und Signale). Habe ein wenig mit Paint gespielt (Anhang). Versuche, die dicken Cs so weit wie möglich an die ICs zu bringen Vielleicht noch einen kleinen Keramischen (SMD) direkt am IC anbringen. Mache die Power-Leiterbahnen so breit wie möglich, die Signale dürfen auch etwas dicker sein. Evtl. für den rechten L6203 einen eigenen Ausgangsverbinder. Der L297 braucht noch einen C für die 5V. Das CNTL (Pin 11) steuerbar machen, vielleicht willst Du mit Slow-Fast-Decay experimentieren. Du hättest das leicht im alten Thread weiterposten können.
> Als Netzteil habe ich einen fetten Ringkerntrafo mit 2x15V 300W > gekauft, wollte mit den vollen 30V AC die "Grätsche" machen und > mit 22mF glätten, sollten etwa 40V DC U_eff rauskommen, ich rechne > mit weniger als 5% Brummanteil. Völlig übertrieben. Der Motorstrom ist viel höher als der Strom, den das Netzteil liefern muss (Schaltnetzteilprinzip - StepDownConverter). > ich überlege gerade ob es möglicherweise besser wäre die > Massefläche unterhalb der stromführenden Leitungen ganz weg zu lassen Auf keinen Fall. Bisher ist es Dir ja gut gelungen, die Massefläche möglichst wenig zu zerstückeln und immer wieder leitende Pfade zu haben. > Ich halte es für ziemlich egal, ob die Leitungen zwischen Stecker > und Treiber, oder zwischen Motor und Stecker lang sind. Ich sehe das anders: wichtig ist, möglichst wenig Fläche aufzuspannen, d.h. Motorleitungen verdrillen, optimal auf der Platine wäre, die beiden Phasenleiter übereinander (d.h. den einen top, den anderen bottom) anzuordnen (aber das zerschneidet die Massefläche). Ein paar Schutzwiderstände zwischen den L6203 und L297 und weiter zu der Ansteuerlogik helfen Geld sparen (wenns wieder mal kracht). Den Reset-Pin 20 würde ich auch herausführen, denn sonst ist der Wechsel in den Wave-Mode unmöglich bzw. unsicher. Immer wieder lese ich, dass Leute versuchen, Schaltnetzteile und Schrittmotortreiber auf dem Steckbrett aufbauen. Das funktioniert nicht oder nur sehr bescheiden (Quietsch, Heiß, Ratter etc.). Hier ein fertiges Projekt: http://www.majosoft.com/engraving/html/stepper_driver_board_with_l297_and_L6203.html
Hallo eProfi, vielen vielen Dank für Deine Eindrücke. mehrere Punkte... 1. Was würdest Du denn für Sense-Widerstände empfehlen? Ich hätte diese hier genommen: http://www.conrad.de/ce/de/product/443860/Metallschicht-Widerstand-01-radial-bedrahtet-MPC74-5-WMPC74-5W-01-Ohm-5-1-St. Die haben den Vorteil, dass sie noch unter den Kühlkörper passen, der sich noch von oben auf der Zeichnung gesehen etwas 25mm über die Platine hereinschiebt, Abstand ca 35mm. Daher kann ich die Elkos auch nicht beliebig nahe an die Ausgangstreiber setzen. 2. Die Sache mit der Ground Plane... Hin und Rück übereinander... auch mit zwei Layern kann man verdrillen, immer wieder rauf und runter, hab mich bisher wenig mit hochstromigen Platinen beschäftigt, gefühlt würde ich sagen, beide Leitungen dicht zusammen, aber unbedingt auf einem Layer bleiben, um nicht zuviel induktiven Dreck durch die Gegend zu pusten. Mit der Ground Rückleitung hast Du mich nachdenklich gemacht...ja der Strom fließt so zurück, wie er auch gekommen ist, wenn es eine Ground-Plane gibt. Da Das "Signal-Ground" der L6203 dann aber auch an der Plane hängt, müsste der Signal-Ground Strom den Leistungsstrom durchqueren, das ist der Grund weshalb ich zurückgeschreckt bin. Das kann nicht zufällig mal gerade jemand simulieren....Einfach ne FE Simulation mit Faradayschem Induktionsgesetz.... :-) 3. Trafo, Du weißt ja nicht, wie viele Motoren ich anschließen will :-) Aber zuzugeben, die 10A sind schon reichlich 4. Schutzwiderstände.... Du meinst microfuses? Wo?? 5. Wave-Mode.. dafür müsste ich dann aber auch den L297 durch einen µC ersetzen, nicht?? Dann kann ich die Schaltung auch neu aufbauen, nächste Version :) 6. Das Steckbrett funktioniert erstaunlich gut... die billigen Dinger sind scheiße.... muss man schon investieren Ich werd mal sehen, was ich heute Abend noch umsetzen kann Danke Schorsch
Hallo nochwas, Control hatte ich auf GND gesetzt, damit die Half-step-Schaltung mit INH1 und INH2 überhaupt funktioniert, zum debuggen könnte es aber nützlich sein, da gebe ich Dir recht Habe jetzt etliches rumprobiert, dadurch, dass ich mind. 20mm Abstand zur oberen Kante brauche werden die Leiterbahnen sofort länger, wenn ich die Elkos weiter nach oben setze, ich glaube ich lasse sie besser da, wo sie sind Schorsch
Angehängte Dateien:
-

stepper-V2.1-sch.png
55 KB -

stepper-V2.1-brd.png
51 KB

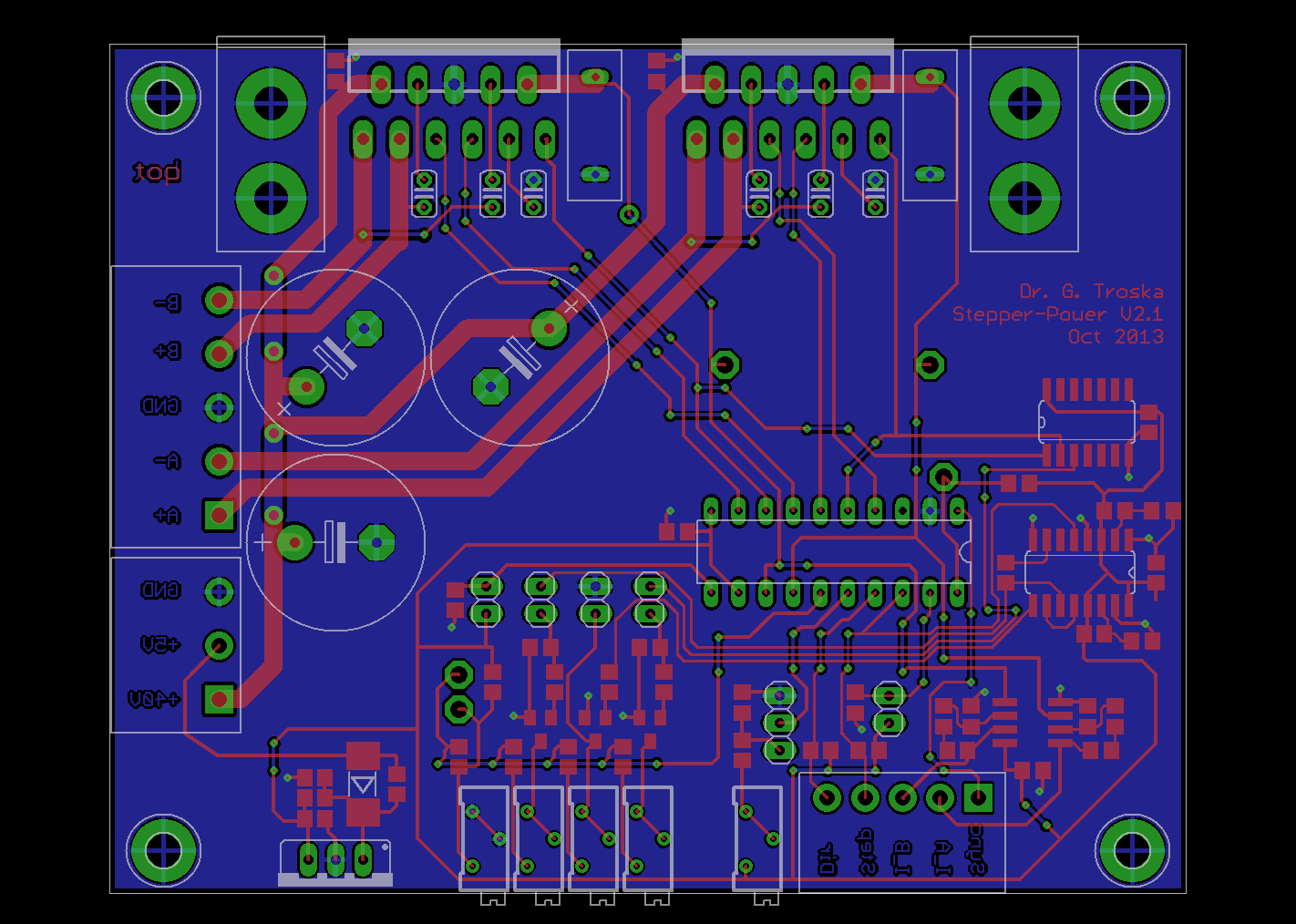
Soooo, hier die neue Version mit den vorgeschlagenen Features, auf auffälligsten: * durchgängige Groundplane * Elkos dichter an die 6203er * CNTL kann jetzt geschaltet werden * Reset hat einen TP bekommen * 6203er haben weitere 100nF unmittelbar am Leistungstreiber bekommen * Leiterbahnen auf der Ground-Seite weiter reduziert * Digital-Schaltungen weiter zusammengeschoben * optionalen 7805er als Spannungsversorgung mit Diode Gruß - bin gespannt, was ihr sagt Schorsch
:
Bearbeitet durch User
Na, das sieht schon mal deutlich besser aus. Ein paar Punkte kommen mir in den Sinn: Den L297 näher an die L6203 (vor allem näher an den linken), etwa in die Mitte der Platine. C8 und C13 um 180° drehen. Die beiden L6203-Pin2 kannst Du oben an der Platinenkante nochmal verbinden (Versteifung). Der Wert des Timing-Cs ist wichtig, er bestimmt nämlich auch die Inhibit-Time, deswegen sollte er nicht zu klein sein, im Datenblatt sind 3,3n empfohlen. Auch zu groß sollte er nicht sein, da sonst der minimal einstellbare Strom recht groß ist (einem Kollegen schon mal passiert). Zu den non-inductive Rs kann ich ein Lied singen. Gerade heute den Fall gehabt: Einer unserer Hersteller hat bisher Sense-Rs von Dale eingebaut. In der letzten Charge hat er den Hersteller gewechselt (Noname). Prompt hat die schnelle Überstrom-Sicherung (Signal wird aus dem R abgeleitet) angesprochen. Ewig den Fehler gesucht. Wer denkt daran, dass ein 1210-SMD-R (0R01) zu viel Induktivität haben könnte? Zum Conrad-Artikel: Merke: wenn in einer Produktbeschreibung / Datenblatt eine Eigenschaft (hier: Induktivität) nicht explizit aufgeführt ist , ist deren Wert nicht besonders gut. Lies dazu mal die S.10 von 20 des L6203-Datenblattes (Figure 14: Intrinsic Structures in the POWER DMOS Transistors und Figure 15: Current Typical Spikes on the Sensing Pin). Zum Reset-Pin: ein Testpunkt ist schon mal gut, besser wäre eine Leitung nach außen. Wenn Du in den Wave-Mode wechseln willst, musst Du im Halbschritt-Mode auf einen geraden State gehen und dann auf Vollschritt umschalten. Am besten also: Reset auslösen (State 1) einen Halbschritt machen (State 2) und in Vollschritt umschalten. Ohne den Reset kann man nie sicher sagen, in welchem State der L297 steht. Den Enable-Eingang kannst Du auch herausführen, um den Motor ganz stromlos zu schalten. > auch mit zwei Layern kann man verdrillen, immer wieder rauf und runter, Das ist natürlich Unsinn, Vias haben denkbar schlechte HF-Eigenschaften. Gemeint war die Leitung zum Motor, die soll phasenweise verdrillt sein. > gefühlt würde ich sagen, beide Leitungen dicht zusammen, aber > unbedingt auf einem Layer bleiben, um nicht zuviel induktiven > Dreck durch die Gegend zu pusten. Das gelingt am besten, wenn die Bahnen auf verschiedenen Layern direkt übereinander liegen (kleinste aufgespannte Fläche, die Magnetfelder heben sich maximal auf). Aber zu bedenken ist auch die thermische Belastung und ggf. das Zerschneiden einer Gnd-Plane. > Da Das "Signal-Ground" der L6203 dann aber auch an der Plane hängt, > müsste der Signal-Ground Strom den Leistungsstrom durchqueren Das ist richtig, aber durch die große Fläche und damit geringe Stromdichte fällt das nicht so ins Gewicht. Außerdem sind in Deinem Layout beide in etwa orthogonal ;-) > 4. Schutzwiderstände.... Du meinst microfuses? Wo?? Nein, die wären zu langsam. Ganz normale 33-100 Ohm in die Signalleitungen. Falls der L6203 mal durchgeht, ist der L297 geschützt, wenn dieser kaputtgeht, ist der µC geschützt (40V finden überall Wege). > 5. Wave-Mode.. dafür müsste ich dann aber auch den L297 durch > einen µC ersetzen, nicht?? Siehe oben bei Reset-Pin. > Control hatte ich auf GND gesetzt, damit die Half-step-Schaltung > mit INH1 und INH2 überhaupt funktioniert, zum debuggen könnte es > aber nützlich sein, da gebe ich Dir recht Control auf Gnd bedeutet fast-decay, das ist aber nicht in allen Fällen optimal. Z.B. bei Stillstand ist Control=Hi (Slow-decay) oft sparsamer (kleinerer Ripple-Strom im Motor, weniger Verlustleistung im Sense-R). Leider ist das im L297-Datenblatt unzureichend beschrieben. Suche nach den passenden Application Notes. Auch das L6208-Datenblatt hat mir hier sehr geholfen. > Mache die Power-Leiterbahnen so breit wie möglich, > die Signale dürfen auch etwas dicker sein. Bitte umsetzten! Die Leitungen sind insgesamt zu schmal, vor allem +5V. Außerdem bevorzuge ich möglichst kurze Verbindungen, egal in welchem Winkel. Jeder 45°-Knick ist eine achtel Windung. Zugegeben, ist Geschmacksache, aber bei mir gewinnt hier Physik über Ästhetik. > Dann kann ich die Schaltung auch neu aufbauen, nächste Version :) Dazu schau Dir mal modernere ICs an, z.B. L6506 (hat zwei Vref-Eingänge, gut für Microstepping), L6208 & Co. und Trinamic. Bei langsamen Geschwindigkeiten ist eine Sinus-Ansteuerung viel laufruhiger. Ein ganz eigenes Kapitel sind Resonanzen, die treten in jedem mechanischen und elektrischen System auf. Bei Schrittmotoren bildet der Läufer, die elastische Welle und die Last ein schwingfähiges System. Wenn die Schrittfrequenz mit dessen Resonanzfrequenz zusammenfällt (oder jeweils Harmomische davon), kann das zu lustigen Effekten führen (Motor hat keine Kraft mehr, wird laut oder dreht sich plötzlich rückwärts). Alles schon erlebt. Ganz übel wird es, wenn ein Teil mit mechanischem Spiel (z.B. ein Getriebe) dazwischenhängt. Hier hilft oft, die Güte des mechanischen Schwingkreises z.B. durch Gel-Dämpfer zu verringern. Wenn möglich, bei den Rampen die kritischen Frequenzen möglichst schnell durchfahren, denn es dauert eine relativ lange Zeit, bis sich eine Resonanz aufbaut. Manchmal hilft ein recht einfaches Mittel: den Motorstrom reduzieren. Was ich noch nicht ganz verstanden habe: die vielen Schaltungen rundrum, wozu verstärkst Du das Sense-R-Signal? Die Vref-Erzeugung ist auch recht aufwendig. Das kann der µC mit einem hochfrequenten PWM-Ausgang besser. Gutes Gelingen!
Hallo, danke für die ausführlichen Notizen, Du warst aber leider 30 minuten zu spät ich hab schon bestellt :-) Ein paar Dinge hatte ich aber schon eingebaut. > C8 und C13 um 180° drehen. Das ist C8 und C13 nicht gedreht hab ärgert mich am meisten... hat aber auch die geringsten Auswirkungen. > Die beiden L6203-Pin2 kannst Du oben an der Platinenkante nochmal > verbinden (Versteifung). Ich habe wochenlang in Laboren gesessen um Gausschleifen zu finden. Nie wieder Ringleitungen!! Da fängt man sich alles mögliche ein > Den L297 näher an die L6203 (vor allem näher an den linken), etwa in die > Mitte der Platine. Wollte nur möglichst weit weg von den stromführenden Teilen, die Schaltung in meinem Steckbrett funktioniert auch und da hängen die Treiber an 20cm Strippen, ich denke das geht auch so > > Mache die Power-Leiterbahnen so breit wie möglich, > > die Signale dürfen auch etwas dicker sein. > Bitte umsetzten! Die Leitungen sind insgesamt zu schmal, vor allem +5V. > Außerdem bevorzuge ich möglichst kurze Verbindungen, egal in welchem > Winkel. Jeder 45°-Knick ist eine achtel Windung. Alle 5V Leitungen sind letzt 24 mil, die 40V Leitungen 66 mil, alle anderen 12 mil > Zugegeben, ist > Geschmacksache, aber bei mir gewinnt hier Physik über Ästhetik. Auch ein Physiker?? Ich auch!! Die nächste Version mit einem anderen Leistungstreiber wird bestimmt kommen. Ich habe noch parallel zu den Sense-Widerständen vom großen C SMD Widerstände von Reichelt auf das Board gepackt, so dass ich beide probieren kann, schau mal hier (Reichelt: CRA2512 R100E), meinste die wären vielleicht besser?? Ich denke es wird schon irgendwie gehen > Was ich noch nicht ganz verstanden habe: die vielen Schaltungen rundrum, > wozu verstärkst Du das Sense-R-Signal? Die Vref-Erzeugung ist auch > recht aufwendig. Das kann der µC mit einem hochfrequenten PWM-Ausgang > besser. Ich denke mit nem µC kann ich aus den Sense-Signalen Boost, Sleep, Halfstep und "Normal" über einen ADC auslesen, indem ich einfach nur die Sense-Leitungen zeitlich analysiere. Ich wollte einfach nur das signal rausgeben, so dass man mal vielleicht ein Display dranhängen kann o.ä. alles noch nicht geplant, werds wohl erstmal nicht verwenden. Das Aufbauen von Vref hatte ich in verschiedenen Quellen gesehen. U.a. hier (vielleicht nicht die beste Quelle, der Schaltplan ist ziemlich murks) http://www.burning-world.de/fotos/cnc/l6203-einkanal.png aber auch bei einer Schrittmotorsteuerkarte von eine BF20 (Google mal nach BF20 Optimum und CNC Controller) Gruß und Danke nochmal Schorsch
:
Bearbeitet durch User
Angehängte Dateien:
-

steppV22.png
49 KB

Weitere Gedanken: Wenn es vom Layout einfacher ist, kann man die beiden Stufen eines L6203 auch vertauschen. Es steht nirgens, dass Phase_A (L297 Pin4) auf IN1 (L6203 Pin5) gehen muss. Im Schaltplan ist CNTL nicht mit dem Label verbunden. C8 und C13 sind mit 63V angegeben, an ihnen liegen nur typ. 13,5V an. > wozu verstärkst Du das Sense-R-Signal? Bedenke dabei auch, dass die Spannung am Rsense bei fast-decay auch negativ werden kann. Tipp: ggf. positiv vorspannen. > er bestimmt nämlich auch die Inhibit-Time, Gemeint ist die Zeit zum Ausblenden der Spikes. Wenn diese zu lange wird, wird auch ein gültiges Signal (Strom bereits erreicht) unterdrückt. >> 4. Schutzwiderstände.... Du meinst microfuses? Wo?? >Nein, die wären zu langsam. Ganz normale 33-100 Ohm in die >Signalleitungen. Diese eignen sich bestens als "3. Platinenlage", um Signale dazwischen durchzufädeln. Es wäre sehr im Sinne des OpenSource-Gedanken, wenn Du die .sch und .brd posten würdest. Bestimmt freuen sich viele über ein so gelungenes Layout. Und ich hätte mich nicht mit Paint quälen müssen.
Hallo eProfi et al, eProfi schrieb: > Es wäre sehr im Sinne des OpenSource-Gedanken, wenn Du die .sch und .brd > posten würdest. Bestimmt freuen sich viele über ein so gelungenes > Layout. > Und ich hätte mich nicht mit Paint quälen müssen. Neulich hatte ich hier mal sch und brd files gepostet und einen Anranzer bekommen, das diese Files nicht für jedermann lesbar seien, so ein Quatsch... Klar, hier sind die Files, hätte die Schaltungen nicht ohne die vielen Ratschläge von den Leuten aus dem Forum zusammenbraten können. > > wozu verstärkst Du das Sense-R-Signal? > Bedenke dabei auch, dass die Spannung am Rsense bei fast-decay auch > negativ werden kann. Tipp: ggf. positiv vorspannen. Stimmt, aber durch den Spannungsfolger wird halt alles negative abgeschnitten, für die Analyse sollte des positve Teil reichen. Eine positive Vorspannung würde die analyse sogar ungleich schwieriger machen. Ist immer ne Frage was man denn so will > > er bestimmt nämlich auch die Inhibit-Time, > Gemeint ist die Zeit zum Ausblenden der Spikes. Wenn diese zu lange > wird, wird auch ein gültiges Signal (Strom bereits erreicht) > unterdrückt. Bin mir nicht 100% sicher, ob ich das richtig verstanden habe, ich dachte über C wird die minimale Zeit definiert in der der Strom angeschaltet ist. Ich hatte beispielsweise versucht, 10nF zu benutzen - hatte keinen anderen gefunden - und oberhalb einer gewissen Frequenz (oder unterhalb eines gewählten Rs) funktionierte das Chopping nicht mehr, der Strom stieg wieder an, weil er nicht schnell genug wieder abgeschaltet werden konnte, habe dann einen kleineren C in der Grabbelkiste gefunden und die Pulsbreite war sofort viel kleiner Gruß Georg
Angehängte Dateien:
-

Stepper-Steckbrett.jpg
120 KB

Hallo, der Vollständigkeit wegen, hier noch ein Foto von der Platine im Steckbrett - bitte nicht lachen :-) Den Motor konte ich mit einem externen Rechteck-Generator bis 10kHz betreiben. Dank der Boost-Funktion springt er bis 3 kHz ohne "Anlauf" an. Zugegeben alles im freien Fall. Schorsch
:
Bearbeitet durch User
Angehängte Dateien:
-

kasten.gif
230 KB -

platine.gif
220 KB

{kind=link}
{kind=link}
{kind=link}
Hallo zusammen, mittlerweile ist alles fertig, die Karten laufen super und ich bin wirklich sehr zufrieden damit (bis auf eine Kleinigkeit, siehe unten). Anbei noch zwei Bilder. Einmal von einer fertig bestückten einzelnen Karte. Das zweite zeigt mein provisorisches Gehäuse indem ich die Karten untergebracht habe, auf dem Photo ist die Verkabelung noch nicht fertig. Inzwischen habe ich eine vierte Karte hinzugefügt, so dass ich neben der üblichen 3-Achsen Fräse auch noch einen Teilkopf steuern kann. Das ganze wurde unter Linux-CNC angeschlossen. Ich kann alle Achsen mit 3600mm/min laufen lassen, das geht ab wie Schmidts Katze. Ein Frage muss ich aber dennoch stellen, denn ein Feature funktioniert nicht und ich weiß wirklich nicht wieso: Es hat mich 4 Leistungshalbleiter gekostet um rauszubekommen, dass das Synchronisationssignal nicht funktioniert. Setze ich den Jumper um, so dass alle Motoren im gleichen Rhytmus choppen, dann rauchen die 03er leider ab, wisst ihr warum?? Ich muss also alle Karten mit einer eigenen Frequenz choppen lassen, was aber auch sehr gut funktioniert. Es gibt kein Quitschen der Motoren und auch keine lästigen Schwebungen. Allenfalls ein leichtes Surren, aber auch nicht in allen Motorstellungen. Wie dem auch sei, vielleicht kennt ja jemand die Antwort, dann können wir das Layout noch anpassen, ich hoffe ich finde Nachahmer Gruß Schorsch
Danke für die Rückmeldung, sie sind schön geworden. > Setze ich den Jumper um, so dass alle Motoren im gleichen Rhytmus > choppen, dann rauchen die 03er leider ab, wisst ihr warum?? Was hast Du genau gemacht? Sind die Sync-Signale aller Platinen miteinander verbunden? Einer muss den Takt angeben, also nicht umgejumpert sein: > The SYNC connections of all L297s to be synchronized are connected > together and the oscillator components are omitted on all but one.
eProfi schrieb: > Was hast Du genau gemacht? Sind die Sync-Signale aller Platinen > miteinander verbunden? Hi, zugegeben ist mittlerweile schon über ein halbes Jahr her... Ich habe die SYNCs verbunden und beim Slave (also dem "nicht-takt-geber") den Jumper 2 umgetzt. Somit erzeuge ich den Zustand der im Datenblatt des L297 in Figure 3 beschrieben ist. Müsste eigentlich funktionieren. Hat aber einfach nicht gechoppt Schorsch
Genau so mache ich das auf meiner 3-Achs Karte mit L297/L298 ("3D-Step"). Die läuft bei tausenden von Kunden. Schaltplan siehe Doku: http://www.mechapro.de/pdf/3D-Step_Doku_20120915.pdf Schaltungsbeschreibung dazu: http://www.mechapro.de/pdf/Funktionsbeschreibung_3D-Step_20120819.pdf Mit freundlichen Grüßen Thorsten Ostermann
Warum nicht? bin mal mit dem Scope drangegangen, funktioniert eigentlich ganz gut.... vielleicht nicht der schnellste... Momentan benutze ich den OP ja noch gar nicht. Falls mir mal irgendwann langweilig ist, wollte ich eine LCD Anzeige entwickeln, die mir die Ströme der einzelnen Phasen (Boost, Sleep, Halfstep und Normal), sowie die Arbeitsfrequenz anzeigt. Der OP sollte das zu analysierende Signal bereitstellen. Auf Grund massivem Zeitmangels ist das aber nie entwickelt worden. Hat jemand Interesse?? Ist eigentlich nicht so kompliziert Schorsch
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.