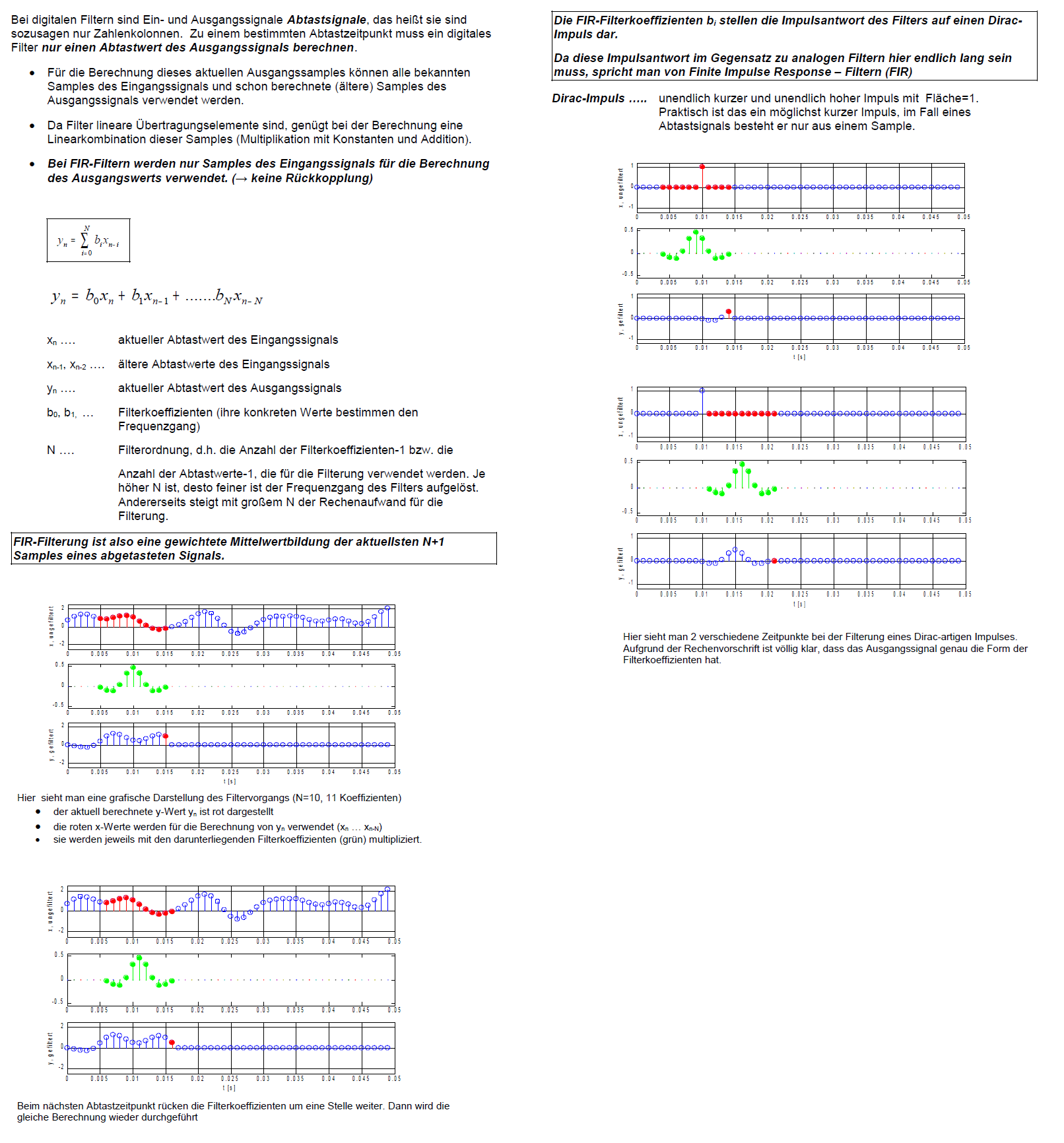
Hallo zusammen! Ich versuche mich gerade auf die Thematik digitale Filter zu stürzen. Also, ein digitales Filter hat als Eingangssignal ein Abtastsignal und logischerweise ist der Ausgang auch ein Abtastsignal. Der erste Punkt auf der ersten Seite meint wohl, dass man aktuelle und ältere Abtastwerte des Eingangssignals verwendet, denn warum sollte man älter Samples im Ausgangssignal nehmen, was bringts? Aber ich verstehe die Formel hier auf der ersten Seite nicht: yn=... x_n ist ja der aktuelle Abtastwert des Eingangssignals und x_n-1 sind älter Abtastwerte. Aber warum in aller Welt muss man eine bestimmte Anzahl an Eingangssamples addieren und jeden Eingangssample mit einem Filterkoeffizienten multiplizieren, um dann nur einen Ausgangssample zu bekommen, der gefiltert ist? "Je höher N, desto feiner ist der Frequenzgang des Filters aufgelöst". Hmm, was bedeteutet feiner? Beim Filtern geht es doch nur um die Dämpfung von Amplituden von bestimmen Frequenzen, um sie nicht mehr dabei zu haben. Und am Ende steht "FIR-Filterung ist also eine gewichtete Mittelwert bildung....", warum Mittelwertbildung? Mittelwert ist ja normalerweise folgendermaßen zu berechnen: Summe / (Anzahl der Summanden). Also der arith. Mittelwert wäre das. Ich hoffe ihr könnt mir helfen ein bisschen in das Thema reinzukommen. Danke! mfg guest007
Angehängte Dateien:
-

filter.png
250 KB
guest007 schrieb: > Der erste Punkt auf der ersten Seite meint wohl, dass man aktuelle und > ältere Abtastwerte des Eingangssignals verwendet, Nein, durchaus nicht. Das wird im folgenden Satz klargestellt. Bei FIR werden nur die vergangenen Abtastwerte berücksichtigt. > denn warum sollte man > älter Samples im Ausgangssignal nehmen, was bringts? Das macht man, wenn man IIR Filter beschreibt. Aber auch ein analoger Filter hat diese Eigenschaft. > Aber warum in aller Welt muss man eine bestimmte Anzahl an > Eingangssamples addieren und jeden Eingangssample mit einem > Filterkoeffizienten multiplizieren, um dann nur einen Ausgangssample zu > bekommen, der gefiltert ist? Ohne jetzt sehr tief in die Mathematik einzusteigen, will ich da nur bemerken, das ein Frequenzgemisch, ja nicht durch einen Augenblickswert sondern durch mehrere bestimmt ist. Demzufolge muss ein Filter, der auf das Gemenge wirkt auch mehrere Abtastwerte berücksichtigen. > "Je höher N, desto feiner ist der Frequenzgang des Filters aufgelöst". > Hmm, was bedeteutet feiner? Beim Filtern geht es doch nur um die > Dämpfung von Amplituden von bestimmen Frequenzen, um sie nicht mehr > dabei zu haben. Die Antwort steckt schon in der Frage. Es geht um "bestimmte" Frequenzen. Da ist es von Vorteil die in hoher Auflösung, also feiner bestimmen zu können. > Und am Ende steht "FIR-Filterung ist also eine gewichtete Mittelwert > bildung....", warum Mittelwertbildung? Warum nicht? > Mittelwert ist ja normalerweise folgendermaßen zu berechnen: Summe / > (Anzahl der Summanden). Also der arith. Mittelwert wäre das. Aha. Schön zu wissen. ;-) Aber beim FIR-Filter handelt es sich, wie beschrieben um einen gewichteten Mittelwert.
Zu der Verwendung des Begriffes "Mittelwert" noch folgendes: Ich denke hier soll didaktisch auf schon Bekanntes verwiesen werden. D.h. Dir soll vermittelt werden, das es sich beim FIR um etwas handelt, das Du schon kennst: Eine Summe, deren Summanden gewichtet sind. Im allgemeinen wird sowas als "Mittelwert" in der Mathematik eingeführt. Du kannst das natürlich allgemeiner eben als Summe gewichteter Summanden betrachten. Dann entfällt die Frage, aber eben auch die hilfsweise Vorstellung.
Hm ok danke, aber ich verstehe nicht: Was soll ein Filterkoeffizient aussagen? Das ist doch nur eine Zahl. Ich verstehe noch immer nicht, warum eine Summe von Abtastwerten und pro Abtastwert einen Multiplikation mit einem Filterkoeffizient dämpfen soll. Da wird ja nur eine Zahl gedämpft oder? Also weil ja nur EINE Zahl y_n rauskommt. Wie kann das funktionieren? Kannst du mir das bitte näher erklären?
Das ist ein FIR mit 3 koeffizienten
Annahme: alle Koeffizienten sind gleich
Wenn b beispielsweise 1/3 wäre kannst du es auch umschreiben
b geht über in b_k und somit geht 1/3 über in 3. somit hast du die Form, die du oben selbst beschrieben hast: summe / anzahl der summanden
Eine Mittelwertbildung über n samples wirkt wie ein Tiefpassfilter, da auf diese Weise die Schwankungen einer Messung geringer werden. Nehmen wir an, es gibt ein Signal zB einen Messwert und dieser ist verrauscht, dann ergibt eine Mittelung von 10 Samples ein glatteres Signal. Da hast du dann auch mehrere alte Samples mit drin. Bitflüsterer schrieb: > guest007 schrieb: >> Der erste Punkt auf der ersten Seite meint wohl, dass man aktuelle und >> ältere Abtastwerte des Eingangssignals verwendet, > Nein, durchaus nicht. Das wird im folgenden Satz klargestellt. Bei FIR > werden nur die vergangenen Abtastwerte berücksichtigt. Nein. Der aktuelle Wert wird genauso verwendet. Im Beispiel von http://de.wikipedia.org/wiki/Filter_mit_endlicher_Impulsantwort steht im Grunde genau das was ich aussagen wollte. guest007 schrieb: > Hm ok danke, aber ich verstehe nicht: Was soll ein Filterkoeffizient > aussagen? > Das ist doch nur eine Zahl. Ich verstehe noch immer nicht, warum eine > Summe von Abtastwerten und pro Abtastwert einen Multiplikation mit einem > Filterkoeffizient dämpfen soll. Bei Mittelung wären die Filterkoeffs immer 1/n. Haben die Koeffizienten bestimmte Werte, so ergibt sich in der Regel ein besserer Frequenzgang beispielsweise. zB kann man mit FIR-Filtern auch Hochpässe realisieren. Da sind dann eben "nur" die Zahlen anders. > Da wird ja nur eine Zahl gedämpft oder? Also weil ja nur EINE Zahl y_n > rauskommt. Wie kann das funktionieren? Ja, pro Zeitpunkt wird immer ein Ausgangssignal "verändert". Aber wenn man da jetzt einen Tiefpassfilter verwendet als Bsp, dann ändert sich eben auch der Signalverlauf über mehrere Samples, also über die Zeit und dann ist eben eine Glättung des Signalverlaufs gemacht worden, was das Ziel eines Tiefpasses ist. LG
guest007 schrieb: > Der erste Punkt auf der ersten Seite meint wohl, dass man aktuelle und > ältere Abtastwerte des Eingangssignals verwendet, denn warum sollte man > älter Samples im Ausgangssignal nehmen, was bringts? Weil man nur aus Differenzen von Samples Änderungen erkennen und damit die Differenzialanteile von Filterverläufen bilden kann. guest007 schrieb: > "Je höher N, desto feiner ist der Frequenzgang des Filters aufgelöst". > Hmm, was bedeteutet feiner? Beim Filtern geht es doch nur um die > Dämpfung von Amplituden von bestimmen Frequenzen, um sie nicht mehr > dabei zu haben. Der Filter ist halt ein diskreter und kann im Gegensatz zur analogen Realität, nur für die Werte agieren, die er infolge des Samplens auch sieht. Daher fallen alle Zwischenwerte, die nicht durch Samples abgedeckt sind, weg. Dort darf der Wert alles machen, was er will, ohne, dass es vom Filter beeinflusst werden kann. Letztlich müsste ein digitaler FIR Filter unendlich viele Stützstellen haben, um wie ein analoger zu wirken.
Filter Maxe schrieb: > Dort darf der Wert alles machen, was er will, ohne, > dass es vom Filter beeinflusst werden kann. Da der Wert aber nicht weiss, wann die Abtastung erfolgt, wird er sich schön an die Spielregeln halten müssen. Entweder er hält sich an das Abtasttheorem von Herrn Shannon (keine Frequenzanteile von der halben Abtastfrequenz oder höher) oder man muss damit Leben, dass der aus den Abtastwerten rekonstruierbare Verlauf der Werte nur noch entfernt etwas mit dem Originalsignal zu tun hat (Aliasing). Bis auf wenig Ausnahmen ist das ausgesprochen störend ;-)
Bitflüsterer schrieb: > guest007 schrieb: >> Der erste Punkt auf der ersten Seite meint wohl, dass man aktuelle und >> ältere Abtastwerte des Eingangssignals verwendet, > Nein, durchaus nicht. Das wird im folgenden Satz klargestellt. Bei FIR > werden nur die vergangenen Abtastwerte berücksichtigt. Da ist mir ein Lapsus unterlaufen. (Matthias hat das zu recht korrigiert). Ich meinte folgendes: Der erste Satz, bezieht sich sowohl auf FIR als auch auf IIR. Deswegen stimmt es nicht, das solche Filter allgemein, nicht die Ausgangswerte berücksichtigen. Ich meinte hingegen nicht, das "vergangene Abtastwerte" nicht auch den zuletzt eingelesenen Abtastwert beinhalten (bzw. pos. ausgedrückt, dass die verg. Abtastwerte - gedacht - auch den "gegenwärtigen" beinhalten). Man redet über den "gegenwärtigen Abtastwert" wenn man von der Berechnung spricht, aber wenn die Berechnung stattfindet, dann ist der Zeitpunkt der Abtastung schon vergangen. (das, damit ich recht behalte ;-) ) Aber jeder weiss, und darauf bezieht sich Matthias, dass mit den vergangenen Abtastwerten und dem "gegenwärtigen" Abtastwert zusammen, die Eingangswerte der Filterberechnung gemeint sind. Einem Anfänger ist das nicht unbedingt klar und man muss aufpassen, wie man sich ausdrückt. Deswegen Dank an Matthias. --- guest007 schrieb: > Hm ok danke, aber ich verstehe nicht: Was soll ein Filterkoeffizient > aussagen? > > Das ist doch nur eine Zahl. Ich verstehe noch immer nicht, warum eine > Summe von Abtastwerten und pro Abtastwert einen Multiplikation mit einem > Filterkoeffizient dämpfen soll. > > Da wird ja nur eine Zahl gedämpft oder? Also weil ja nur EINE Zahl y_n > rauskommt. Wie kann das funktionieren? > > Kannst du mir das bitte näher erklären? Leider weiss ich nicht ganz genau, worauf Du genau hinauswillst, meine aber eine gewisse Ahnung zu haben. Es scheint mir, dass Du folgendes fragst: Es kommt nur eine Zahl bei der Berechnung heraus, aber ich gebe _viele Zahlen ein. Während die vielen Zahlen, für mich (also Dich guest007) verständlich, Frequenzen repräsentieren, ist nicht klar, wieso die einzelne Ausgangszahl der Filterberechnung eine gefilterte Frequenz darstellen soll. Verstehe ich Dich so recht? Ich nehme das mal an und antworte wie folgt: Die Fourieranalyse zeigt, dass jeder einzelne Abtastwert zu der Analyse beiträgt. Seine Höhe, also seine Amplitude beeinflusst nicht nur eine Amplitude der beteiligten Frequenzen sondern auch die Frequenzen. Er beeinflusst nicht einmal nur_ die Amplitude _einer Frequenz, sondern die mehrerer beteiligter Frequenzen (geht man von einem Gemisch von vielen Frequenzen aus; es gibt natürlich Sonderfälle). Anders ausgedrückt heisst das, dass in einem Abtastwert, Informationen über viele Frequenzen stecken. Um das anschaulich zu machen, könntest Du mal im Netz nach Java-Applets suchen, die aus Abtastwerten eine Fourieranalyse machen. (Ich habe jetzt leider kein Beispiel parat, könnte aber beim suchen helfen). Wenn Du mit einem einzelnen Abtastwert herumspielst, wirst Du sehen, das sich in der Analyse mehrere Frequenzen ändern. Daraus ergibt sich für Deine Frage folgendes: Ein einzelner Abtastwert beinhaltet (unter bestimmten Voraussetzungen und in gewissen Grenzen, welche sich aus den Fouriertheoremen ergeben) Informationen über das gesamte Signal. In der Praxis sind diese Voraussetzungen und Grenzen gegeben. Ich bin sicher es gibt viele weitere Erklärungsansätze dazu. Voraussetzung für alle diese Überlegungen aber ist, dass Du die Theoreme der Fourieranalyse grundsätzlich verstehst. Wenn Du erlaubst, möchte ich Dir auch empfehlen, beim lesen einige "seltsame" Behauptungen erstmal einfach hinzunehmen und weiterzulesen. Vieles wird erst aus dem Zusammenhang klar und kann nicht in einem einzelnen Satz erschöpfend klargestellt werden.
Bitflüsterer schrieb: > Bei FIR werden nur die vergangenen Abtastwerte berücksichtigt. So dogmatisch würde ich das nicht sehen. FIR Filter verwenden durchaus Abtastpunkte aus Vergangenheit und Zukunft. Das sie damit akausal sind, stört bei vielen Anwendungen nicht, eröffnet einem aber interessante Filtereigenschaften, z.B. phasenneutrale Filter.
Wie benutzt man den Samples aus der Zukunft? Doch nur, indem Du deinen Betrachtungszeitraum in die Vergangenheit legst.
Markus Wagner schrieb: > Doch nur, indem Du deinen Betrachtungszeitraum in die Vergangenheit legst. Das ist eine Frage des Bezugspunktes. Bei Offline-Datenanalyse oder bei Signalverarbeitung, die eine gewisse Zeitverzögerung zuläßt, ist der Blick in die Zukunft kein Problem ;-) Oder meinst du, sonst würde ein "live" MP3-Datenstrom im Internetradio funktionieren?
> indem Du deinen Betrachtungszeitraum in die Vergangenheit legst.
Eben und damit liegt dann auch die "Gegenwert", aus der Du die
angebliche "Zukunft" betrachtest, in der Vergangenheit. Eine klare
Verschlechterung :-)
Meine Filter machen das anders, die agieren stets aktuell und schauen
wenn überhaupt nur nach hinten. :D
Angehängte Dateien:
-

Mittelwertfilter.png
29 KB
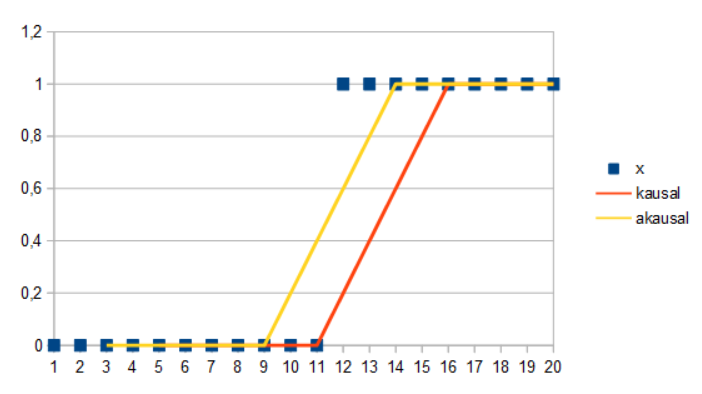
Jürgen Schuhmacher schrieb: > Meine Filter machen das anders, die agieren stets aktuell und schauen > wenn überhaupt nur nach hinten. :D Dann wird ein Mittelwert z.B. bei einem Sprung des Signals immer phasenversetzt sein (rot) - das will man nicht immer. Mit einem akausalen Filter (gelb) liegt er schön zentriert um den Sprung.
Mike, mein Einwand mit den Zeiten war ein gag.:-) Also nochmal: Am Ende werden alle Samples immer erst berücksichtigt, wenn sie vorhanden sind und der Filter hängt immer der Realität hinter. Die Interpretation des Gültigkeitszeitpunktes macht den Unterschied. Konkret muss man den Gegenwartspunkt des Eingangssignals verschieben (verzögern) um in einem SV-System beide Signale zeitlich parallel zu haben. Mithin halte ich es für etwas irreführend, in diesem Punkt zwischen kausalen und akausalen Filtern zu unterscheiden und damit zu suggerieren, es gäbe zwei Sorten, die womöglich auch noch unterschiedlich arbeiten.
Ok, danke leute! D.h. nun, dass ein Abtastwert eines abgetasteten Signales mehrere Frequenzen darstellt, oder wie kann man das besser ausdrücken? Aber wie man auf meinem Bild sehen kann, kann man doch auch mehr Abtastwerte nehmen zum Berechnen des Y-Wertes. In meinen Beispiel werden ja 11 Abtastwerte hergenommen, mit den jeweiligen Filterkoeffizienten multipliziert und dann addiert --> ein Y-Wert entsteht. Von wo ist das abhängig, wie viele Abtastwerte ich hernehme zur Berechnung? Von meinem Signalabschnitt? "Die FIR-Filterkoeffizienten bi stellen die Impulsantwort des Filters auf einen Dirac-Impuls dar. Da diese Impulsantwort im Gegensatz zu analogen Filtern hier endlich lang sein muss, spricht man von Finite Impuls Response - Filtern." Dieser Absatz steht ja auf S.3 meines Bildes. Sie muss endlich lang sein? Es geht doch nicht anders oder? Es gibt keine realen Dirac-Impulse. Oder was meint dieser Satz genau?
guest007 schrieb: > D.h. nun, dass ein Abtastwert eines abgetasteten Signales mehrere > Frequenzen darstellt, oder wie kann man das besser ausdrücken? Nein. Ein Abtastwert alleine kann keine Frequenz darstellen. Eine Folge von Abtastwerten kann analysiert werden und als Summe von komplexen Sinus- und Kosinusschwingungen dargestellt werden (Fourieranalyse/transformation). Diese haben je eine Frequenz. Das sind dann die Frequenzen über die gesprochen wird. Dein Filter kann nun das Signal so verändern das gewisse Frequenzen bedämpft oder verstärkt werden. Ein FIR (Finite Impulse Response) Filter betrachtet einen endlichen Abschnitt seines Eingangssignals für diesen Zweck. Es arbeitet nach der Formel aus deinem ersten Bild:
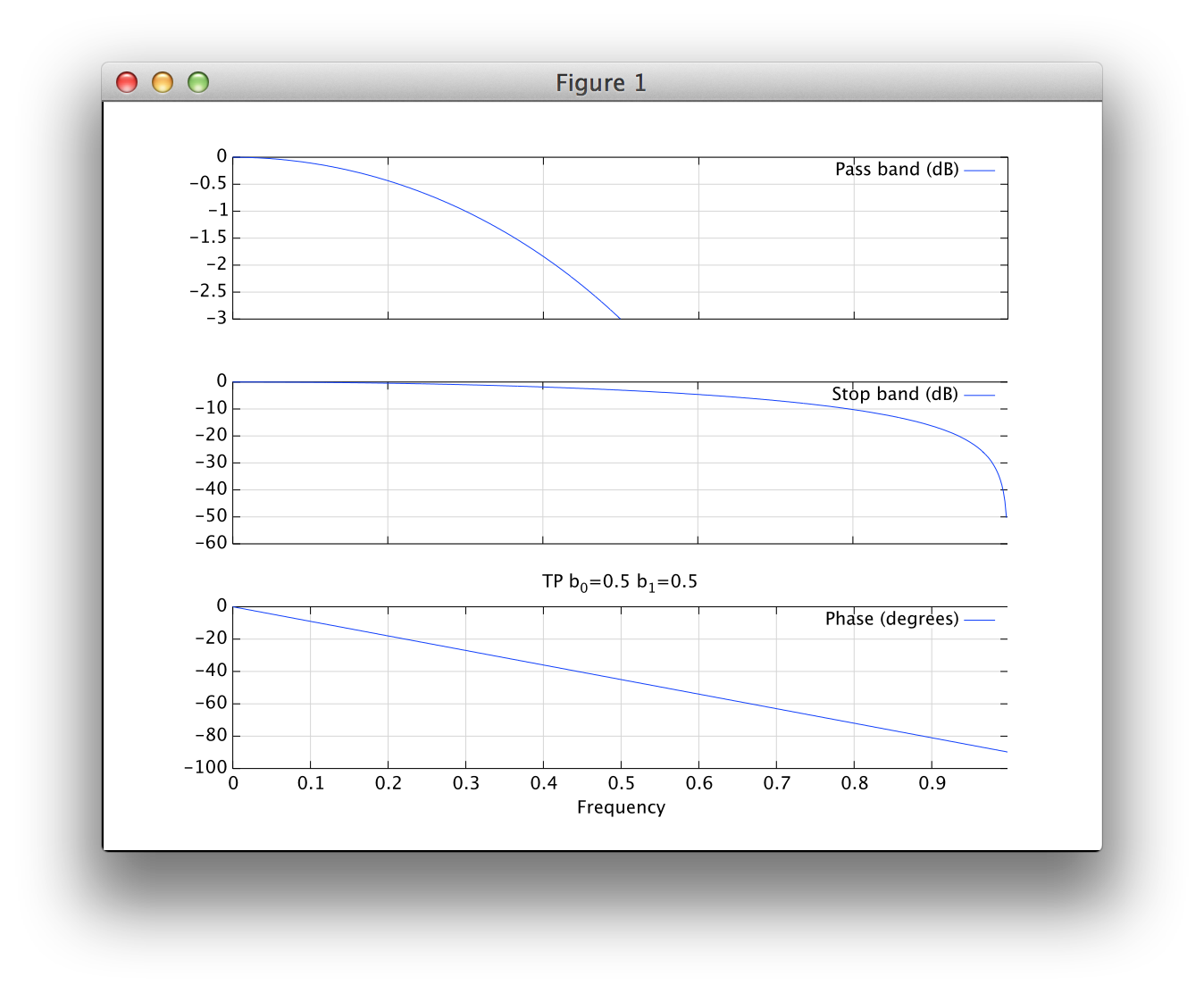
d.h. eines gewichteten Mittelwerts. Ein einfacher Tiefpass ist z.B.
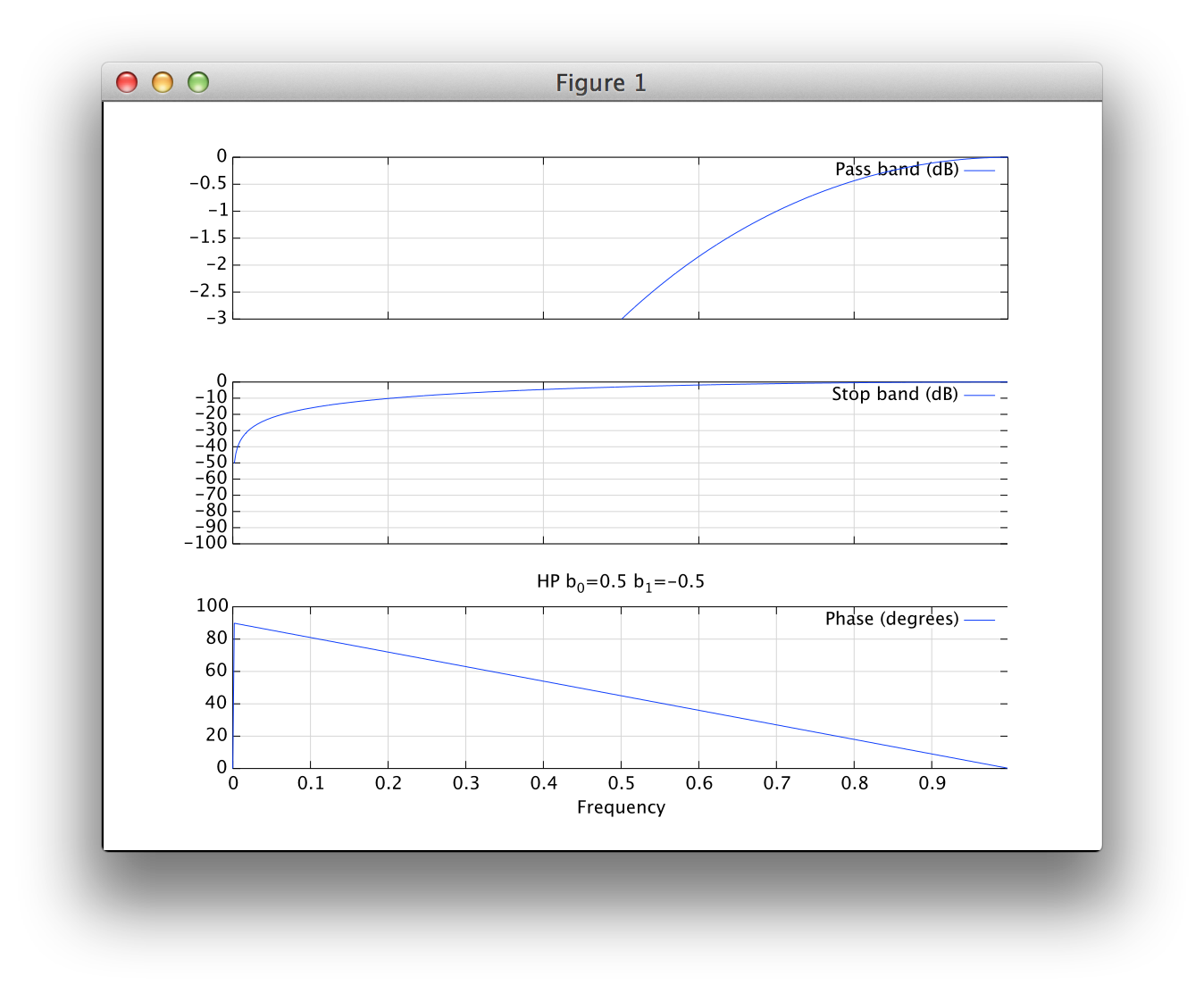
Ein einfacher Hochpass ist
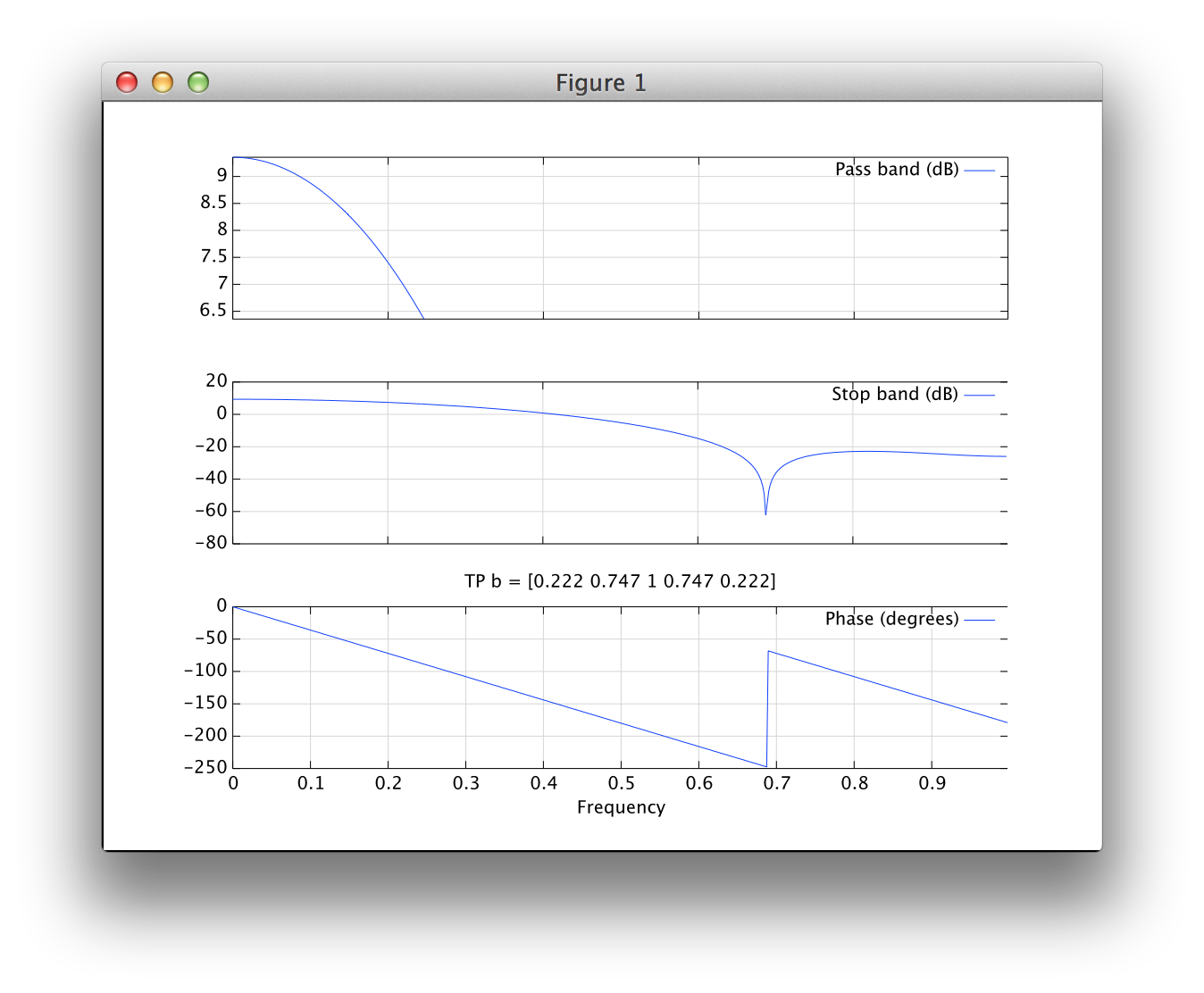
Wenn Du nun mehrere Koeffizienten spendierst kannst Du bessere/komplexere Frequenzgänge erzeugen. (Siehe das Bild TP1.png) guest007 schrieb: > Von wo ist das abhängig, wie viele Abtastwerte ich hernehme zur > Berechnung? > Von meinem Signalabschnitt? Somit hoffe ich das Deine Frage beantwortet ist. Du nimmst so viele Koeffizienten wie Du brauchst um den gewünschten Frequenzband zu realisieren. (Im wirklichen Leben kommt dann auch die benötigte und verfügbare Rechenleistung dazu und eventuell noch andere Randbedingungen) guest007 schrieb: > Dieser Absatz steht ja auf S.3 meines Bildes. Sie muss endlich lang > sein? > Es geht doch nicht anders oder? Es gibt keine realen Dirac-Impulse. Bei FIR (Finite Impulse Response) ist die herausstechende Eigenschaft eine endlich dauernde Impulsantwort zu besitzen. Es gibt allerdings auch IIR (Infinite Impulse Response) Filter deren Impulsantwort unendlich dauern kann, aber auch zumindest länger als die Anzahl der Koeffizienten des Filters. Diese Filter betrachten Ihre Eingangsdaten und die selbst erzeugten Ausgangsdaten. Es ist rückgekoppelt. Die Struktur und Formel dieser Filter ist natürlich anders als die der FIR Filter:
Dieser Typ Filter kann zwar mit weniger Koeffizienten vorgegebene Frequenzgänge realisieren, allerdings können aufgrund der Rückkopplung IIR Filter instabil sein und zum Schwingen anfangen. Genauer will ich darauf nicht eingehen, da es auch nicht die ursprüngliche Frage ist. Zu den Dirac-Impulsen: Da tut man sich in der digitalen Welt einfacher: Der Dirac"Impuls" ist folgendes Signal: d[0] = 1, d[m] = 0 für alle anderen m und somit tatsächlich realisierbar (im Gegensatz zur analogen Welt) Wenn Du nun über den Dirac und FIR Filter nachdenkst wirst Du erkennen das, wenn Du bei einem FIR einen Dirac als Eingangssignal hast direkt die Filterkoeffizienten als Ausgangsfolge erhältst. Ich hoffe das hilft Dir. Gute Nacht, Markus
Markus B. schrieb: > Somit hoffe ich das Deine Frage beantwortet ist. > Du nimmst so viele Koeffizienten wie Du brauchst um den gewünschten > Frequenzband zu realisieren. (Im wirklichen Leben kommt dann auch die > benötigte und verfügbare Rechenleistung dazu und eventuell noch andere > Randbedingungen) Soll natürlich Frequenzgang heissen anstatt Frequenzband. Da hat die Autokorrektur in der Nacht zugeschlagen...
Hey, ich hätten da noch eine Frage und zwar: Wie die digitalen Filter als Tiefpass fungieren hab ich verstanden. Messwerte mal Koeffizienten und dann addieren. Hier nochma die Frage: sind die koeffizienten in einem Filter alle gleich ? Verstehe nicht wie der Rechenalgorithmus lautet für einen Hochpass. Und sind die Filterarten FIR und IIR für alle arten von Filterungen geeignet (Bandpass, Hochpass, Tiefpass, Bandsperre)? Danke im voraus
Detlef Eche schrieb: > Hier nochma die Frage: > sind die koeffizienten in einem Filter alle gleich ? Nein. Die Koeffizienten hängen von deiner Übertragungsfunktion ab. Detlef Eche schrieb: > Verstehe nicht wie der Rechenalgorithmus lautet für einen Hochpass. Genauso wie für den TP. Detlef Eche schrieb: > Und sind die Filterarten FIR und IIR für alle arten von Filterungen > geeignet (Bandpass, Hochpass, Tiefpass, Bandsperre)? Ja Die Koeffizienten hängen von der Übertragungsfunktion ab. Sie unterscheiden sich natürlich, je nach Übertragungsfunktion die realisiert werden soll. Mit Koeffizienten meine ich die
und
aus aus meinem vorvorherigen Beitrag. Für die Berechnung der Koeffizienten gibt es verschiedene Verfahren, je nachdem welche Übertragungsfunktion gewünscht ist (z.B. Equiripple design, maximal flat design, least squares, windowed, bilinear transformation, impulsinvarianz, ... ) und ob z.B. ein Filter aus dem analogen Bereich in den digitalen Bereich transformiert werden soll.
Angehängte Dateien:
-

Unbenannt.JPG
24 KB
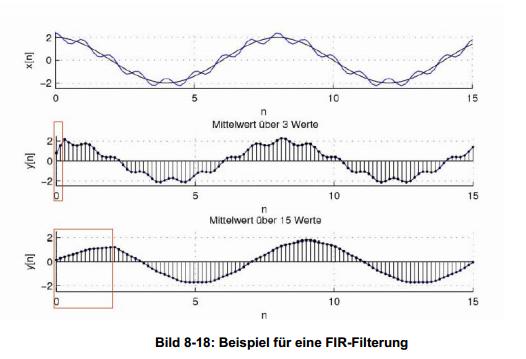
Also trotz dass ein Filter nur eine Übertragungsfunktion hat, sind die Koeffizienten a0, a1, a2, b0 ..... nicht gleich ? Zum Algorithmus vom Hochpassfilter nochmal: Er soll ja hochfrequente Signale durchlassen und tieffrequente sperren. Jetzt hab ich z.B. ein niederfrequentes Signal das Hochfrequente Anteile besitzt. Wie filtere ich per Mittelwertbildung nun die niederfrequente Schwingung heraus. Weil wenn ich die Eingangswerte mit den Koeffizienten multiplizier und dann addiere erhalte ich nur eine Glättung und die Hochfrequente Schwingung wäre gefiltert. (siehe Bild) Hab da irgendwas ma gehört mit negativen Koeffizienten. Kann da aber irgendwie mathematisch nicht folgen. Danke schon ma im voraus
Detlef Eche schrieb: > Hab da irgendwas ma gehört mit negativen Koeffizienten. Kann da aber > irgendwie mathematisch nicht folgen. Am einfachsten zu verstehen sind vielleicht die Frequency Sampling Filter, bei denen man durch die Nullstellenverteilung des Zählerpolynoms direkt die Sperrfrequenzen des Filters festlegt, also in Bezug auf TP, BP, HP keinerlei Einschränkungen unterliegt. http://www.bulletin.zu.edu.ly/issue_n15_3/Contents/E_04.pdf
Ok Danke. Hatt denn keiner mal ein Rechenbeispiel für einen Digitalen Hochpass. Am besten FIR. Also ein Rechenbeispiel indem man die gefilterten Werte berechnet. Danke
Ich nehme beim HP immer das Gegenteil vom Tiefpass. Also den Rest, der über bleibt. Wäre dagegen etwas einzuwenden?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.