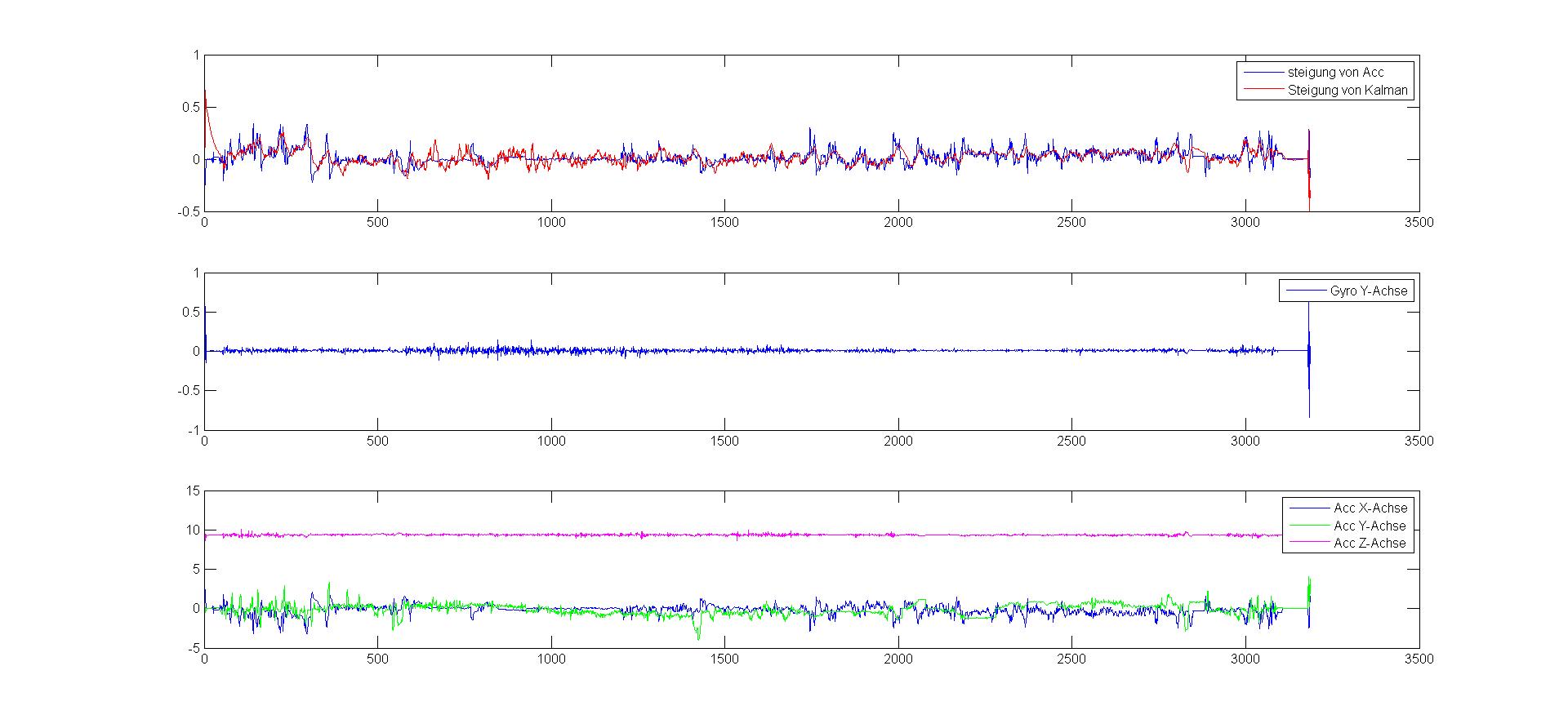
Hallo zusammen, Ich mache jetzt eine kleine Projekt,mithilfe von Handy-Sensorik(Beschleunigungssensor und Gyroskope) um die Steigung der Straße zu bestimmen.hab ich KalmanFilter verwendet. http://blog.tkjelectronics.dk/2012/09/a-practical-approach-to-kalman-filter-and-how-to-implement-it/ das problem ist, ich habe keine Ahnung, wie ich Q und R einstellen soll und welche Größe sind richtig. Meine Einstellung war Q [0.001 0 ; 0 1e-6] , R=0.2. Das Ergebnis ist in Abbildung dargestellt. Ist mein Ergebnis gut? oder wie soll ich mein Ergebnis beurteilen. Vielen Dank vorab! Grüße Andy
Angehängte Dateien:
-

untitled.jpg
140 KB
Also die Messrauschmatrix R kannst du aus dem Sensorrauschen bestimmen, da das Diagonalmatrix mit den Varianzen der Sensoren hast. Das könntest du messen indem du in Ruhelage der Sensoren Messungen vornimmst (korrigiert um Drifts). Q ist für das Systemrauschen, sprich wie sehr du dem System vertraust. Das wird häufig durch probieren ermittelt. Grundsätzlich gilt, dass kleine Werte für Q mehr Vertrauen bedeuten...
Danke für deine Antwort. Das problem ist, weiss ich nicht, wie klein die Q ich einstellen soll. Ich habe ein paar werte versucht. z.B.Q= [0.01 0; 0 1e-6]. Das Ergibnis hat große Unterschied vergleich mit Q = [0.001 0; 0 1e-6].so jetzt weiß ich nicht, welche Q soll ich vertrauen. Grüße
Ich würde einfach die Sensorplatine ausgehend von der Ruhelage in bestimmte Lagen drehen bei denen ich weiß was der ideale Wert darstellen soll. Wenn du die Sensordaten irgendwie auf den PC bringst, könnte man das in Matlab oä sich plotten lassen und dann einfach vergleichen. Außerdem: Wenn du die Winkelmessung nur aus Beschleunigungsmessungen über trigonometrische Funktionen berechnest, ist das im Grunde auch nur eine Näherung. Das wird aber meist verschwiegen. Die Messung ist zusätzlich nur gültig, wenn man keine externen Beschleunigungen hat, außer den g-Vector.
max schrieb: > Außerdem: Wenn du die Winkelmessung nur aus Beschleunigungsmessungen > über trigonometrische Funktionen berechnest, ist das im Grunde auch nur > eine Näherung. Das wird aber meist verschwiegen. Die Messung ist > zusätzlich nur gültig, wenn man keine externen Beschleunigungen hat, > außer den g-Vector. Wo ist denn das eine Näherung? Man kann doch aus der Rotationsmatrix seiner beliebigen Winkel Parametrierung (Euler zyx, xyx, was auch immer) multipliziert mit [0 0 -g] zumindest zwei der drei Raumwinkeln analytisch berechnen. Dass beim Rechnen Genauigkeitsprobleme auftreten können - ok. Und ja, das gilt natürlich nur, wenn du keine Zusatzbeschleunigungen hast, da hast du recht. Schöne Grüße, Jan edit: hab' ganz vergessen was zu der Frage des OT zu schreiben :-/ Dein R ist das Rauschen der Zustände, die du in deinem Messmodell verwendest. Z.B. ist das der Beschleunigungssensor. Das Rauschen (besser: die Kovarianzmatrix des Rauschprozesses) kannst du wie erwähnt in erster Näherung aus einem Stillstand-Versuch ermitteln. Die Elemente auf der Hauptdiagonalen sind deine Varianzen, also die quadrierte Standardabweichung des dazugehörigen Zustands. Die Einträge auf den Nebendiagonalen geben die (Kreuz-)Kovarianzen an. Also wie stark die einzelnen Zustände voneinander abhängen. Das ist unter Umständen schwierig zu ermitteln. Häufig wird daher erstmal eine Diagonalmatrix für R verwendet. Q ist das Systemrauschen. Dein Bias z.B. wird üblicherweise durch einen random walk oder durch einen komplizierteren Prozess beschrieben. Die Varianz ist ein Maß für die "Ausprägung", also wie stark der Prozess rauscht. Schwankt der Bias extrem stark, müsstest du einen höheren Wert wählen. Such mal nach "allan variance plot" oder "gyro bias estimation". Der Wert ist bestimmbar. Schwieriger wirds für die Varianz deines Winkels. Dein Kalman nimmt an, das der Winkel oder besser die DGL deines Winkels mit additiven, weißen Rauschen überlagert ist. Bin mir nicht sicher, ob der überhaupt vernünftig bestimmt werden kann. Für den Anfang wähle den Wert mal 1-3 Zehnerpotenzen niedriger, als den des Beschleunigungssensors. Damit sagst du im Prinzip aus, dass das Filter dem Gyro mehr vertrauen soll, da das Rauschen geringer ist. Wählst du den Wert zu klein, wird der Sensor driften oder z.B. in Anfangssituationen, in denen die Orientierung noch nicht feststeht nur sehr langsam bestimmen können, weil der Beschleunigungssensor kaum noch beachtet wird. Hmm war mehr Text als gedacht. Hoffe du verstehst ein bisschen was. Mfg, Jan
> > Wo ist denn das eine Näherung? Man kann doch aus der Rotationsmatrix > seiner beliebigen Winkel Parametrierung (Euler zyx, xyx, was auch immer) > multipliziert mit [0 0 -g] zumindest zwei der drei Raumwinkeln > analytisch berechnen. Wie genau berechnest du es analytisch?
Habe keine Lust, die Matrizen hier aufzuschreiben. Hier http://de.wikipedia.org/wiki/Eulersche_Winkel#Beispiel_f.C3.BCr_Gier-Nick-Roll gibts die parametrierung. Da ist das die Kraft, du kannst aber einfach durch m teilen, dann hast du die Beschleunigung in m/s^2. Oder durch m*g, wenn dein Sensor g liefert. Davon gehe ich jetzt aus Nicht wundern über das [0 0 +mg], glaube die haben da die z Achse anders herum gelegt. Jedenfalls kommt heraus:
Eventuell musst du noch die Vorzeichen bei den sin(theta) tauschen, wenn dein Gewichtsvektor in die andere Richtung zeigt. Jedenfalls kannst du sehen, dass du Zeile 2 und 3 durcheinander teilen kannst, dann steht da in Komponenten
für den zweiten Winkel
kannst du z.B. die letzte Zeile nehmen und einfach einsetzen. Kannst aber auch noch etwas rumrechnen, um von dem arccos zu einem arctan zu kommen. Schöne Grüße, Jan
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.