Hallo Zusammen Direkt vorne weg: Wer sich gerade auf einen kompletten Oktokopter beim Öffnen dieses Posts gefreut hat, muss sich leider noch Gedulden, denn das ganze ist noch nicht fertig. Aber beginnen wir am Anfang: Ich bin 19 Jahre alt und arbeite seit ein paar Monaten in einem kleinen Unternehmen. Wohnort Schweiz. Ich habe eine Berufslehre als Elektroniker abgeschlossen und werde ab Sommer studieren. Da mir und zwei guten Freunden in unserer Freizeit oft langweilig ist und diese auch technische Berufe erlernt haben, dachten wir uns, es wäre eine nette Idee die gewonnene Erfahrung im Rahmen eines Privaten Projektes umzusetzen. Wir sind alle begeisterte Modellflieger, so entstand die Idee nach einer komplett selbst entwickelten Drohne, dass ganze komplett Open Source! Das Projekt könnte aus dem Grund interessant sein, dass wir alle drei grosse Erfahrung mit Modellfliegen haben, allerdings ziemlich wenig davon wissen, wie so ein Oktokopter aufgebaut ist, bzw. nach welchen "Standards" alle Hersteller arbeiten. Heisst, unsere eigene Kreativität ist gefragt, somit erwarten wir, dass sich unsere Arbeit bemerkenswert von herkömmlichen Modellen unterscheiden wird. Ein weiterer "cooler" Punkt ist, dass wir drei bisher nur eine Berufslehre abeschlossen haben. Hinter diesem Projekt steht kein Ingenieurwissen oder sonst etwas, was zur Folge haben sollte, dass das Projekt (Code, Hardware usw.) auch für nicht ganz so extrem erfahrene gut verstanden werden kann. Ziel des Projektes: Ziel ist es, ein fertiges Modell entwickelt zu haben, für welches alle Dateien veröffentlicht werden. Das ermöglicht auch eine simple weiterentwicklung. Zudem soll auch die Fernbedienung komplett selbst Entwickelt werden! -------------------------------------------------------------- Aufbau : - Die Elektronik wird in einem ersten Schritt mit PIC's aufgebaut, in einer zweiten Version soll die Steuerplatine dann auch mit Controllern von Atmel realisiert werden, um mehr Leute anzusprechen. - Programmiert wird das gesamte Projekt in C, möglicherweise ein paar Kritische Stellen in Assembler - Die Software welche benutz wird, soll möglichst Gratis sein. So findet für die Programmierung MPLABX seine Verwendung, für die Atmel Version ist noch nichts vorgesehen. - Die Hardware wird mit Eagle erstellt. Auch wenn wir im Besitz einer Lizenzierten Version sind, versuchen wir das ganze so aufzubauen, dass sich das Projekt auch mit der Freeware bearbeiten lässt - Der Nachbau des Modelles wird laut unserer ersten Schätzung rund 500 Euro betragen. Klar, gibt es billigere Modelle, aber unser Ziel ist es nicht eine Low Budget Production anzufertigen. Ausserdem soll unser System diversen Schnik-Schnak bieten, was in der heutigen Zeit ja kaum Wegzudenken ist. Hier bereits einige eingeplante Gadgets: - RGB LED's rund um den Kopter, angesteuert per PWM mit extra. Controller - Kamerahaltung, Schwankbar (Bereits ein Teil realisiert) - Motoren individuell Startbar (Was gibts schöneres als jeden Rotor mit umlegen eines Schalters Starten zu können?) Viele dieser Dinge sind zwar nicht nötig, aber die Implementierung davon ist nicht sehr kostspielig und es ist ein nettes Extra. -------------------------------------------------------------- Technische Daten : - 4 Zellen LiPo Akkus - Auf dem Kopter stehen +8V, +5V & +3V3 zur Verfügung für individuelle Erweiterungen - Über 15 Analoge Eingänge zum anschliessen von selbstgebauten Schaltungen (Eventuell Temperaturmessung oder anderes) - Über 45 Digitale Ein/Ausgänge zum anschliessen von selbstgebauten Erweiterungen - I2C, UART & SPI stehen über Klemmen zur Verfügung - Sichere Elektronik mit dauerhafter Spannungsüberwachung der Akkus, bei zu tiefer Spannung kann automatischer Landevorgang eingeleitet werden - Kommunikation mit Fernbedienung über DMA USART, somit mehr CPU Leistung für andere Sachen vorhanden - Reichweite von ca. 750 Meter - 3 Controller vorhanden, welche unterschiedliche Aufgaben übernehmen. Kommunikation dieser 3 Controller über UART -------------------------------------------------------------- Aktueller Fortschritt : - Schema Fernbedienung: 100 % - Layout Fernbedienung: 0 % - Schema Steuerelektronik: 100 % - Layout Steuerelektronik: 50 % (Gerade in Bearbeitung) - Schema Brushless-Motor Regler: 100 % - Layout Brushless-Motor Regler: 100 % - Software Fernbedienung: 0 % - Software Steuerelektronik: Ca. 10 % - Software Brushless Regler: 100 % So, somit haben wir hier mal einen Tread geöffnet. Wir werden nun Regelmässig den aktuellen Fortschritt beschreiben, zudem dürften im Verlauf der nächsten Woche die ersten Bilder folgen, in erster Linie vor allem von den ersten Motor Tests, welche wir bald durchführen können. Am Montag sollten wir unsere erste Materiallieferung erhalten. Falls ihr noch Fragen habt oder weitere Ideen für Implementierungen, dann zögert nicht diese zu beschreiben! Wir danken für für jeden Gedanken! Falls das Interesse bestehen sollte, an dem Projekt aktiv mitzuwirken, kann gerne per E-Mail Kontakt mit mir hergestellt werden, es liese sich bestimmt etwas einrichten ;) So, genug Text, sorry für den Roman! Freundliche Grüsse & Bis Bald
:
Bearbeitet durch User
Neboisha A. schrieb: > Aktueller Fortschritt : > > - Schema Fernbedienung: 100 % > - Layout Fernbedienung: 0 % > - Schema Steuerelektronik: 100 % > - Layout Steuerelektronik: 50 % (Gerade in Bearbeitung) > - Schema Brushless-Motor Regler: 100 % > - Layout Brushless-Motor Regler: 100 % > - Software Fernbedienung: 0 % > - Software Steuerelektronik: Ca. 10 % > - Software Brushless Regler: 100 % Wo ist das Open Source zum Download ?
Neboisha A. schrieb: > Die Elektronik wird in einem ersten Schritt mit PIC's aufgebaut Welche PICs habt ihr verwendet?
184 schrieb: > Wo ist das Open Source zum Download ? Neboisha A. schrieb: > Direkt vorne weg: Wer sich gerade auf einen kompletten Oktokopter beim > Öffnen dieses Posts gefreut hat, muss sich leider noch Gedulden, denn > das ganze ist noch nicht fertig. Wir haben vor, entweder alles zum Schluss öffentlich zu machen, oder wir veröffentlichen Schrittweise, aber erst dann, wenn alles getestet ist. Da uns zurzeit noch Material fehlt, können wir noch nicht mit einer 100 % Sicherheit sagen, dass der geschriebene Code so funktioniert. Bzw. ich weiss zwar, dass meine Brushless-Regler funktionieren, aber was die Ansteuerung angeht (über I2C) bin ich mir noch nicht ganz sicher, ob dass Protokoll so bleiben wird oder ob es sich im Laufe der Entwicklung noch ändert. Um so mögliche Verwirrung möglichst in Grenzen zu halten, ist es mir lieber, den Code erst gegen Ende zu veröffentlichen, bzw. halt dann, wenn wir wissen dass dieser Code Teil so nichtmehr verändert werden muss. Sonst gibt das alles ein riesen durcheinander. Falls es aber nicht warten kann und du unbedingt bereits den Source Code haben willst, kannst du dich sonst gerne per Mail an mich wenden, dann kann ich dir einige Teile zukommen lassen, aber halt ohne Garantie dass sie auch später so verbaut werden. Max H. schrieb: > Welche PICs habt ihr verwendet? Auf dem gesamtsystem vorhanden sind: 1x PIC23HJ12GP202 2x PIC24FJ64GA002 1x PIC32MX795F512H Mit allen drei Controllern haben wir bereits viel Erfahrung gesammelt und haben uns daher für diese, wenn wohl uach etwas überdimensionierten Controllern entschieden. Ein Grund, weshalb da solche Dinger verbaut wurden ist, dass man so die möglichkeit hat viele Digitale & Analoge Ein/Ausgänge bereitzustellen, welche danach zur individuellen Erweiterung dienen können, was ja auch das Ziel des ganzen ist. Ein Freund von uns, welcher sich zurzeit zum Elektroniker ausbilden lässt und etwas mitwirken will entwickelt zurzeit ein kleines Modul, welche diverse Messungen wie Luftdruck usw übernimmt. Ausserdem will er einen GPS Logger bauen und die abgeflogene Strecke auf einer SD Karte abspeichern. Über den Nutzen lässt sich natürlich streiten, aber ist trotzdem ein nettes extra! Дуссель дукъ schrieb im Beitrag #3630575: > Toll. Weiter so. Vielen dank. :)
Ich bin gerade an einer ganz ähnlichen Stelle. Ich baue einen Hexa. Meine Brushless-Regler sind auch gerade fertig. Also einer läuft zuverlässig und ich bin gerade dabei, die ganze Schaltung 6x aufzubauen. Ein bisschen habe ich schon die Fernsteuerung angefangen. Allerdings nutze ich nur AVR's, mit PIC's kenne ich mich nicht aus. Ich denke, der interessante Teil kommt noch (bei uns beiden), die eigentliche Fluglageregelung. Da ist dann mal bisschen Mathe gefragt. Ich selber bin Elektromeister und habe auch kein Ingenieurwissen, deswegen freut es mich, das noch jemand mit gleichwertigen Bildungsstand etwas sehr ähnliches versucht. Dennis
Dennis H. schrieb: > Ich bin gerade an einer ganz ähnlichen Stelle. Sehr schön zu lesen, dass wir nicht die einzigen sind die sich an sowas ran machen! Update : Die erste Materiallieferung ist heute eingetroffen, wir hoffen sehr einen Teil noch diese Woche bauen zu können und euch hier erste Bilder zu präsentieren!
Warum nicht als Artikel im Wiki, mit mehr gestalterischer Freiheit? Wobei ich auch gleich für die fortschreitende Aktualisierung votiere. Wäre schade, Potenzial anderer Nutzer nicht rechtzeitig einzubinden.
Angehängte Dateien:
-

Layout_Steuerplatine.png
32 KB
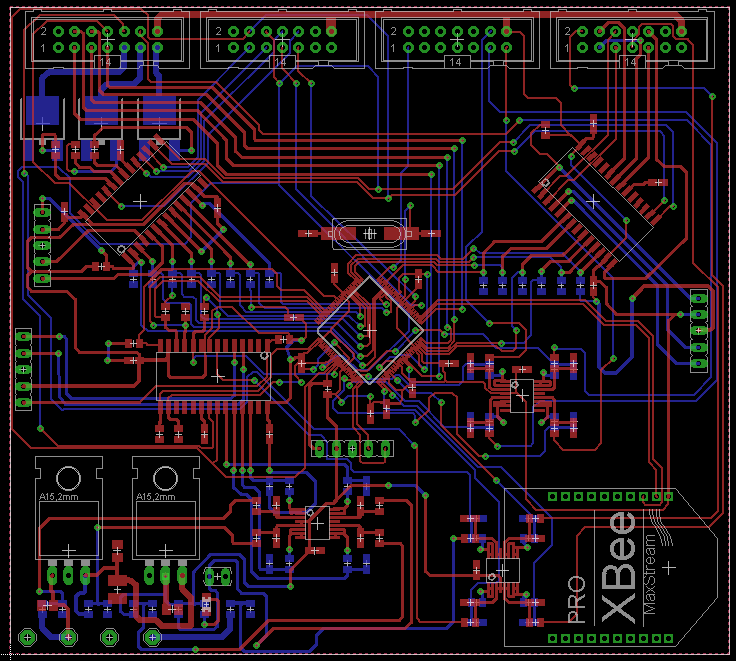
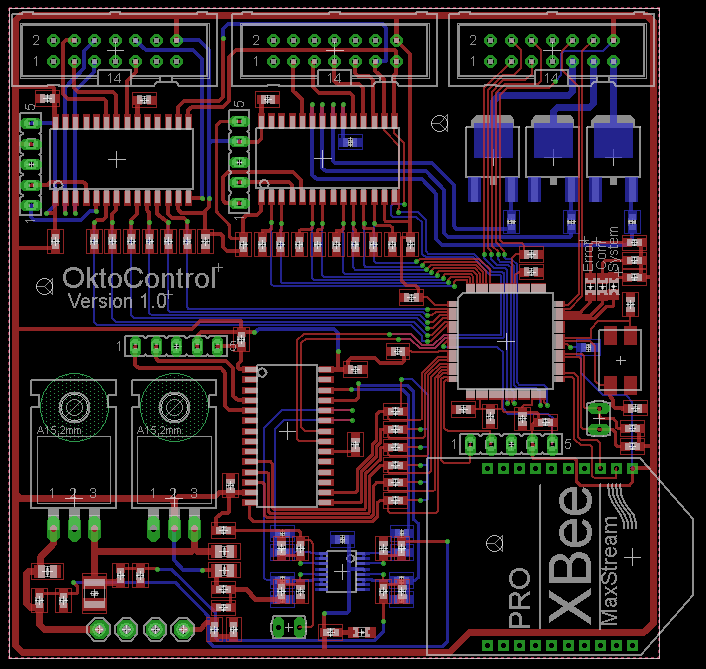
Boris Ohnsorg schrieb: > Warum nicht als Artikel im Wiki, mit mehr gestalterischer Freiheit? Über das haben wir uns auch schon Gedanken gemacht. Ist in der Tat in Planung. Nur haben wir gedacht, es wäre eventuell schöner so eine Wiki Seite erst dann zu machen, wenn endlich erste veröffentlichungen gemacht werden können. Zurzeit könnten wir gerade mal Bilder von nicht verlöteten Bauteilen, unseren Motoren & einer Leiterplatte reinstellen, was nicht sonderlich interessant wäre. Übrigens ist eine erste Version des Layouts für die Steuerplatine fertig, welche später auf dem Oktokopter sein wird. Das Layout wird später noch einmal überarbeitet, um das ganze noch schöner zu gestalten. In einem ersten Versuch geht es aber lediglich um die Funktionalität. Bevor hier gleich der Kritiksturm losgeht: Es wurde so gut wie nötig, nicht so präzise wie möglich gelayoutet!!! Dinge wie Vias unter den ICs usw. werden in der richtigen Version nichtmehr vorhanden sein, bis diese gemacht wird dauert es wohl noch zwei, drei Monate. Im Anhang mal ein Bild des Layouts. Schema folgt in einigen Tagen, sobald wir uns sicher sind, dass wir das Teil so bestellen. Gruss
Immer mit der Ruhe, euch hetzt ja niemand. Mit mehreren Leuten macht sowas sicher noch mehr Spaß und man findet Fehler eher mal. Ich bin schon manchmal an einfachsten Fehlern bald abgestorben, weil ich sie einfach nicht gesehen habe. Ich habe bestimmt 3 Monate gesucht, warum meine Motoren nur in geringer Drehzahl drehen. Irgendwann hat es Klick gemacht und auf einmal merkte ich, das mein Code eben doch keinen Fehler hat, sondern in der Anwendung der Hardware einen Fehler drin habe. Ich weis nicht, ob ihr euch ein zeitlimit gesetzt habt, ich habe keins. Ich mache etwas dran, wenn ich Zeit und Lust habe. Aber vielleicht kann man sich ja gegenseitig bei dem ein oder anderen Problem helfen. Wird sich zeigen. Was für Sensoren nutzt ihr? Ich habe den MPU6050 auf Ebay für 2,30€ das Stück gefunden, da hab ich gleich 3 geordert, die nutzen ja schon recht viele und sind durchaus begeistert. Und sind wesentlich billiger als die ADXRS620 beim Mikrokopter. Ist jetzt aber nur der Chip, kein Breakout-Board, aber auch die gibts für 12 - 15 Euros bei Ebay. Dennis
:
Bearbeitet durch User
Dennis H. schrieb: > Immer mit der Ruhe, euch hetzt ja niemand. Mit mehreren Leuten macht > sowas sicher noch mehr Spaß und man findet Fehler eher mal. Ich bin > schon manchmal an einfachsten Fehlern bald abgestorben, weil ich sie > einfach nicht gesehen habe. Ja, dass ist natürlich ein grosser Vorteil an einer Projektarbeit mit mehreren beteiligten. Dennis H. schrieb: > Ich weis nicht, ob ihr euch ein zeitlimit gesetzt habt, ich habe keins. > Ich mache etwas dran, wenn ich Zeit und Lust habe. Nein. Ein Zeitlimit für ein solches Projekt zu setzen wäre falsch. Uns geht es primär darum, ein gut funktionierendes Modell zu bauen und nicht ein Modell welches so schnell wie möglich fliegt und sich in der Luft kaum kontrollieren lässt. Ausserdem beginnen wir ab diesem Sommer alle mit unserem Studium, da können wir die Zeit die uns für diese Arbeit bleibt auch nicht sonderlich gut einschätzen. Und ja, auch wir arbeiten immer gerade dann an diesem Projekt, wenn uns danach ist. Manchmal vergehen ein paar Tage, ohne dass wir ein Wort darüber verlieren, manchmal sprechen wir von nichts anderem. Dennis H. schrieb: > Aber vielleicht kann > man sich ja gegenseitig bei dem ein oder anderen Problem helfen. Wird > sich zeigen. Wieso auch nicht. Es ist immer toll, gesammelte Erfahrung austauschen zu können. Falls bei dir fragen auftreten, meld dich ruhig jederzeit bei uns. Können dir auch ein paar Kontaktpersonen aus dem Internet geben, die richtig viel Erfahrung mit solchen sachen haben und auch uns bei diesem Projekt unterstützen. Dennis H. schrieb: > Was für Sensoren nutzt ihr? Das ist bei unserem Projektstand so ne sache für sich. Wir haben uns entschieden, alle Sensoren die wir brauchen werden (Wir haben auch vor, andere Daten in der Luft zu erfassen wie bsp. Luftdruch usw) auf einer separaten Leiterplatte zu montieren. Dies ermöglicht uns eine spätere Auswahl der Sensoren. Auf der Steuerelektronik wurden UART, SPI & I2C auf einen Stecker geführt, somit stehen alle drei Schnittstellen zur Verfügung und wir können uns was die Sensoren angeht ruhig noch ein bisschen Zeit lassen. Vielen dank für deinen Tipp mit deinem Sensor, habe mir den gerade mal angeschaut, sieht sehr nett aus! Werden wir uns mal noch genauer anschauen, vielleicht benutzen wir ja auch direkt den. Gruss
Okto P. schrieb: > Auf der Steuerelektronik wurden UART, SPI & I2C > auf einen Stecker geführt, somit stehen alle drei Schnittstellen zur > Verfügung Das ist auf jedenfall ein sehr gutes Vorgehen, welches ich auch vor habe. Weil ich auch jetzt noch nicht absehen kann, was ich vielleicht mal brauche, weil ich auch einfach noch keine größere Erfahrung mit solchen Projekten habe. Die Sensoren, die ich jetzt nutzen möchte, nutzen eben schon einige andere offensichtlich ganz erfolgreich. Ich selbst bin ja auch noch nicht an dem Punkt, diese auszuwerten. Luftdruck will ich auch messen, dafür habe ich gerade eben den MS5611 aus dem Briefkasten geholt, unglaubliche 10cm Auflösung. Was das dann mal in der Praxis wert ist, weis ich noch nicht, aber auch für 9 Euros bei Ebay geschossen, da isses nicht schlimm, wenns doch ein anderer Sensor wird. Dennis
Angehängte Dateien:
-

all_about_V2013.png
60 KB
Coole Sache das! Habe auch einen, allerdings als Quattro, gebaut.
Wie oft willst du den Post noch löschen und wieder neu erstellen?
:
Bearbeitet durch User
Woran hast du das gesehen? Ich wollte eigentlich nur ein andere Datei anhängen. Habe aber keine andere Möglichkeit gefunden als den ganzen Post zu löschen. sorry. Ah...,jetzt sehe ich es auch ...
:
Bearbeitet durch User
Carsten M. schrieb: > Woran hast du das gesehen? Ich habe den Thread abonniert und war zur Zeit als du gepostet hast online. > Ich wollte eigentlich nur ein andere Datei anhängen Ich habe die Anhänge nicht bis ins letzte Detail studiert und habe den Unterschied nicht gesehen. Wenn es wirklich eine andere Datei war: Ich kenne auch keine andere Möglichkeit als den gesamten Post zu löschen und hätte es wahrscheinlich auch so oder so ähnlich gemacht.
Halli Hallo liebes Forum! So das wir uns auch mal wieder kurz gemeldet haben: Wir stecken derzeit voll in unseren Abschlussprüfungen. Lernen hier, stress da. Nach der zweiten Juni Woche haben wir die Prüfungen komplett abgeschlossen und werden dann direkt mit dem Aufbau bzw. der Weiterentwicklung der Drohne beginnen. Ich werde in den nächsten 2-3 Tagen noch einige Bilder hier reinstellen des aktuellen Fortschrittes, falls ich daran denke. Schon einiges an Material ist bei uns eingetroffen! Bis dahin danken wir für die Geduld! Freundliche Grüsse
Angehängte Dateien:
-

OktoControl.png
23 KB
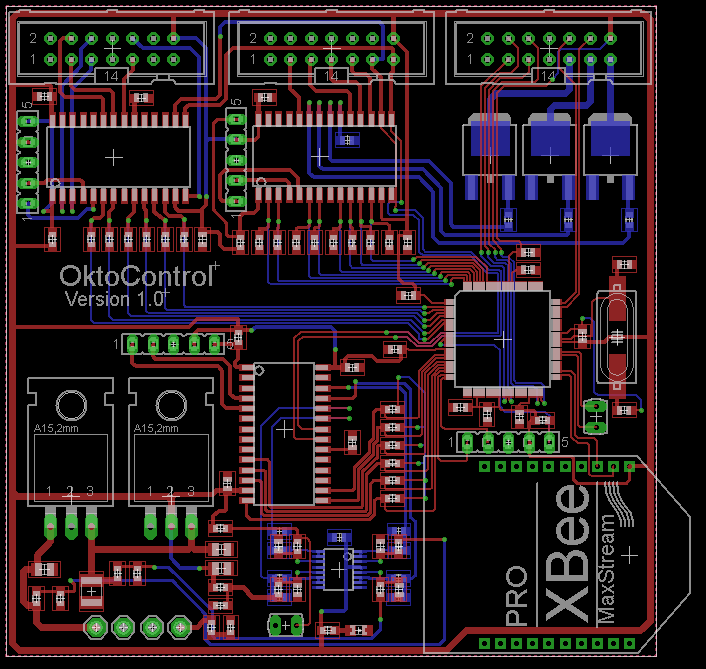
Hallo! Prüfungen durch, wieder Zeit für die Arbeit! ;) Leider habe ich die versprochenen Bilder etwas verpazt. Dafür gibt es heute ein kleines Update! Etwas weiter oben wurde von mir das Layout der Steuerplatine gepostet. Wie in diesem Post ebreits erwähnt, sollte diese noch einmal überarbeitet werden. Ich kann euch nun das neue Layout unserer Steuerplatine, der "OktoControl Version 1.0" vorstellen. Ich denke, dieses Layout ist schon wesentlich besser gelungen. Hat zwar hier und da noch einige maken, allerdings schon viel sauberer als die erste Version. Die kommenden Tage werden wir die Leiteprlatte bestellen. Ausserdem wurde das Schema etwas angepasst. Die Leiterplatte misst nun neu 80x80cm, anstelle von 100x110 wie zu beginn. Dafür wurden einige kleine Funktionen weggelasen, für welche wir bereits Ersatzlösungen gefunden haben. Vorab: Wir haben geplant, die Leiterplatte bei PCB-Pool zu bestellen, daher wurde auch deren spezifikationen verwendet. Nach dem im DRC (Design-Rule-Check) von Eagle alle Spezifikationen korrekt eingestellt wurden, freut es uns umso mehr zu sehen, dass bei dem Layout laut DRC 0 Fehler vorliegen. Somit dürften keine Probleme beim bestellen auftreten. GND ist natürlich mit einem Polygon verbunden. Sobald die Leiterplatte da ist, werde ich Fotos davon Online stellen. Die Bestückung dürfte dann auch nichtmehr lange auf sich warten lassen. Kritik am Layout natürlich erwünscht, falls welche vorhanden. ;) Grüsse und bis bald!
Hallo, prinzipiell sieht das ganze aufgeräumt aus - ohne Scahltplan ist jedoch eine Kommentar zum Layout schwierig. Was ich persönlich auf jeden Fall anders machen würde, ist das Routing vom Quarz. Einerseits ist die Massefläche genau unter dem Quarz durch die Leitung am TOP-Layer zerschnitten, und der 2-fache Layerwechsel auf der CLK-Leitung ist irgendwie nicht schön. Es wird sicher funktionieren, jedoch würde ich bei einer Steuerung für ein Flugobjekt auf maximale Störfestigkeit achten. Grüße Max
Hallo Max Gott sei dank erwähnst du den Quarz noch! Gerade gestern kam mir die Idee diesen noch zu ändern, also nicht nur das Routing, sondern generell die Footprints, ging dann aber durch den Stress heute irgendwie vergessen. Werde mich gleich dran setzen und nachher noch einmal ein neues Bild des Schaltplans posten!
Angehängte Dateien:
-

OktoCtrlV1_newscreen.png
37 KB
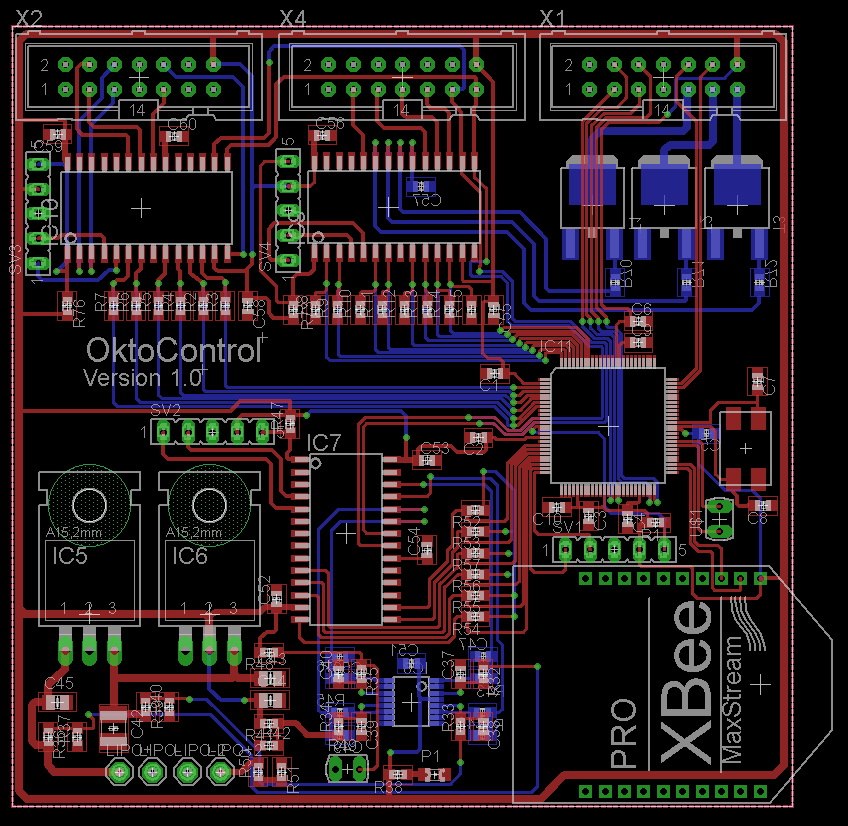
So, der Quarz ist nun angepasst. Im Anhang ein neuer Screen des Layouts, weitere Kritik natürlich gerne erwünscht. Max schrieb: > ohne Scahltplan ist jedoch > eine Kommentar zum Layout schwierig. Der Schaltplan folgt in ein paar Tagen. Denke, unsere Layout Erfahrung dürfte für den rest gut genug gewesen sein, auch wenn wie gesagt einige Teile nicht sonderlich sauber sind (Siehe Bot Seite unten in der Mitte, Spannungsversorgung des IC's) <- werden wir vielleicht noch einmal überarbeiten. Den Schaltplan stellen wir Online sobald wir bestellt haben, klingt vielleicht Kontaproduktiv, da ihr uns so nicht unbedingt weitere Tipps geben könnt, denke allerdings nicht dass es viele Heikle Stellen gibt, ein bisschen selbst einschätzen können wir das ganze ja. Ausserdem wird man Anhand des Schaltplans schnell erkennen, dass wir noch lange keine Ingenieure sind. Sehr viele Verbindungen hätte man sich sparen können und die Datenübertragung zwischen den UC's komplett mithilfe des UART realisieren. Trauen wir uns allerdings rein programmiertechnisch nicht ganz zu (Ist auch der Grund, weshalb wird mehrere uC's haben, da wir nur schwer abschätzen können wie stark belastbar ein uC noch ist, nachdem er Berechnungen für Geschwindigkeit der Motoren usw erledigt hat).
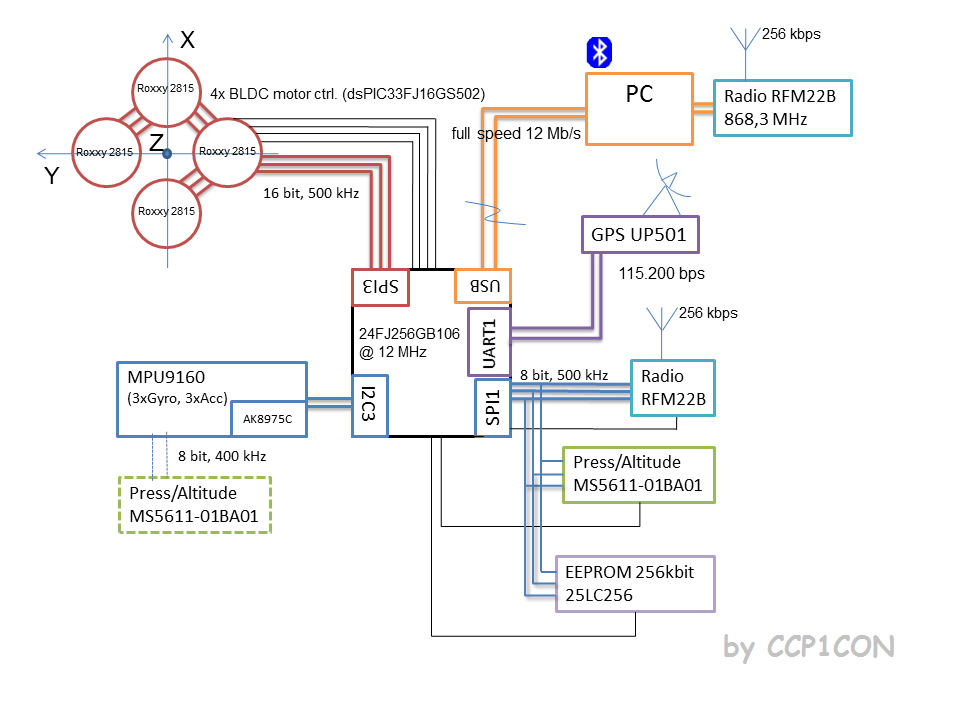
Also der PIC24FJ256GB106 auf meiner flight control läuft mit 16 MHz (Platz nach oben). Die control loop (sozusagen) läuft aller 13 ms (keine Ahnung, hat sich so ergeben - geht bestimmt noch langsamer). Der PIC ist nach 4-5 ms mit allem durch: Sensoren auslesen (3x Gyros, Accel, Pressure, Compass and GPS), filtern, berechnen und an die Motorcontoller senden. Da hängt natürlich viel von Eurem Programmiergeschick ab ... ;-)
Wieso faengt man ein neues Projekt ohne Anforderungsdruck noch in C an und nimmt nicht gleich C++?
Quack schrieb: > Wieso faengt man ein neues Projekt ohne Anforderungsdruck noch in C an > und nimmt nicht gleich C++? Gegenfrage: Wieso C++? Gibt es C++ Compiler für den PIC24?
Quack schrieb: > Wieso faengt man ein neues Projekt ohne Anforderungsdruck noch in C an > und nimmt nicht gleich C++? Auf keinen Fall C++, nehmt auf jeden Fall JavaScript oder PHP dafür! C ist wirklich sowas von altbacken, das nutzt heute doch niemand mehr, der professionelle Softwareentwicklung betreibt! Da gibt es auch gar keine abgerundeten Ecken und so!
>>C++, nehmt auf jeden Fall JavaScript oder PHP dafür
Wir programmieren Microcontroller. Keinen Core i7 ;-)
Die Sprachen sind bequem für den Programmierer und leistungsstark. Kein
Zweifel. Aber der Controller macht dann auch viel unnötiges Zeug.
Standard C ist ein gute Zwischenlösung, in meinen Augen.
Daniel H. schrieb: > Auf keinen Fall C++, nehmt auf jeden Fall JavaScript oder PHP dafür! > > C ist wirklich sowas von altbacken… Am besten die PHP-Engine in JavaScript schreiben und auf einer VM laufen lassen – damit man einfach einen Reset machen kann. Auch wenn Cobol und Fortran zur Großvater-IT zählen, hält Banken und Forschungseinrichtungen niemand davon ab, es weiterhin einzusetzen. Jede Sprache hat ihre Vor- und Nachteile. Eine Steuerungsanlage in einer interpretierten Sprache zu machen halte ich aus Sicht der Echtzeitfähigkeit für experimentell. Ich habe tatsächlich von Basic-Programmierern gehört, die 5-10 ksps (Signalabtastung) hinbringen. Als kleine Randnotiz sollte man nicht vergessen, dass die Traglast eines Fluggerätes immer im Verhältnis zum Energielieferanten steht, abzgl. der Eigenmasse. Spart man soviel wie möglich Peripherie, kann man das Verhältnis nur verbessern, eine physische Grenze gibt es aber. 1-2A Stromaufnahme eines PHP-Interpreter-Systems im Vergleich zu 20mA eines durchschnittlichen Controllers lassen knapp 980mA für die Motoren.
Wow, das sind ja mal viele Antworten! Versuche ich hier mal auf die Vorschläge einzugehen. Carsten M. schrieb: > Also der PIC24FJ256GB106 auf meiner flight control läuft mit 16 MHz > (Platz nach oben). Das ist super, vielen dank für diese Information! Ich denke, Programmieren können wir nicht all zu schlecht (Ginge bestimmt noch wesentlich besser, aber irgendwie hat bisher alles funktioniert). Das Problem dass wir derzeit noch haben ist eher die Realisierung des Systems. Die Struktur des Codes ist uns noch ein bisschen ein Rätsel, hoffen allerdings dass sich diese mit der Zeit ergeben wird. Ideen kommen mir oft erst, wenn ich bereits am Programmieren bin. Man muss dazu aber auch sagen, dass genau diese Regelung auch alles mit nur einem PIC bei uns gemacht wird. Die anderen Controller übernehmen Zusatzaufgaben für Zukünfitge Aufgaben wie Kamera, RGB-LED Beleuchtung usw. Wäre zwar bestimmt auch weiterhin alles mit einem möglich gewesen, aber was solls. Ist ja unser Privatprojekt, können machen was wir wollen. Haben uns nun erstmal für diese Variante entschieden, trotzdem danke für den Tipp. ;) Gibt einen ersten Orientierungspunkt. Quack schrieb: > Wieso faengt man ein neues Projekt ohne Anforderungsdruck noch in C an > und nimmt nicht gleich C++? Weil wir nunmal ein C++ können. Auch wenn es durchaus in meinem Interesse liegt, bei diesem Projekt meine Fähigkeiten zu verbessern, habe ich trotzdem keine Lust C++ zu lernen. So ein Projekt würde sich als Einstieg bestimmt nicht sonderlich gut eignen und somit würde sich alles wieder verzögern, was eigentlich nicht in unserem Sinne war. Carsten M. schrieb: >>>C++, nehmt auf jeden Fall JavaScript oder PHP dafür > Wir programmieren Microcontroller. Keinen Core i7 ;-) Das wäre ja somit schon beantwortet. ;) Carsten M. schrieb: > Die Sprachen sind bequem für den Programmierer und leistungsstark. Kein > Zweifel. Aber der Controller macht dann auch viel unnötiges Zeug. > > Standard C ist ein gute Zwischenlösung, in meinen Augen. Absolut. Ausserdem sind bei mir C Kenntnisse vorhanden. Bei allen anderen Vorschlägen müsste ich erst einmal hinter die Bücher, ausser bei PHP. Denke, da eignet sich C aber wesentlich besser. Alles in allem: Vielen dank für die Tipps zu der Programmiersprache, wir haben aber zu Beginn des Projektes definiert dass wir in C Programmieren, dabei möchten wir gerne auch bleiben. Heute werden wir an unserer Fernbedienung arbeiten, wenns gut läuft gibt es vielleicht erste Bilder heute Abend. ;)
Okto P. schrieb: > Weil wir nunmal ein C++ können. Auch wenn es durchaus in meinem > Interesse liegt, bei diesem Projekt meine Fähigkeiten zu verbessern, > habe ich trotzdem keine Lust C++ zu lernen. So ein Projekt würde sich > als Einstieg bestimmt nicht sonderlich gut eignen und somit würde sich > alles wieder verzögern, was eigentlich nicht in unserem Sinne war. So ein Projekt ist eigentlich ideal. Und da der Uebergang von C zu C++ fliessend ist (was wohl jenseits des Horizonts der restlichen Kommentatoren ist), ist der Initialaufwand gering. Einfach den C++-Compiler verwenden und (fast) klassisches C schreiben. Irgendwann mal darueber nachdenken, warum man eigentlich Strukturen und die darauf operierenden Funktionen nicht als Klasse formuliert... der Wandel ergibt sich fast von selbst.
Quack schrieb: > Einfach den > C++-Compiler verwenden und (fast) klassisches C schreiben. Irgendwann > mal darueber nachdenken, warum man eigentlich Strukturen und die darauf > operierenden Funktionen nicht als Klasse formuliert... der Wandel ergibt > sich fast von selbst. Einerseits kann ich dir da zustimmen. Andererseits muss ich dir auch etwas wiedersprechen. Ich hatte in meiner Berufslehre genau 1 Unterrichtslektion (45 Minuten) Theorie über C++ und über Klassen. 45 Minuten sind zu so einem Thema relativ wenig. Was mir mein Lehrer erzählt hat, hat mich eher verwirrt als etwas anderes. So leuchtet mir der Sinn einer Klasse noch nicht so ganz ein. Ausserdem denke ich, dass wir genug Mühe haben werden das Projekt umzusetzen. Auch wenn es für viele hier wohl nicht sonderlich schwierig sein mag, ist es für uns, auch wenn wir seit mittlerweile 36 Stunden unsere berufslehren abgeschlossen haben, doch eine grosse herrausforderung. Ich habe beispielsweise in meiner Lehre eher Schaltungen entwickelt, als programmiert. Glücklicherweise Programmiere ich aber an sich sehr gerne, was mich dann auch dazu bewegt hat, ab und an mal etwas in der Freizeit zu machen. Trotzdem wäre eine "fremde" Programmiersprache wieder eine Fehlerquelle mehr. Zudem ist das Projekt Open Source. Ich will hier ja nichts falsches behaupten, aber ich denke mal es können wesentlich mehr Leute C als C++. Wieso sollten wir also eine Programmiersprache verwenden, welche eine kleinere Mehrheit der Leute versteht? Unser Ziel ist es ja irgendwann einen Oktokopter zum selbstbau anbieten zu können, mit allen dazugehörigen Unterlagen. Darunter auch die Software. Da ist es für die Leute die sowas nachbauen würden (falls es die geben wird) doch wesentlich interessanter wenn der Code in einer Sprache geschrieben ist, welche man versteht, oder etwa nicht? Gruss
Quack schrieb: > Einfach den > C++-Compiler verwenden und (fast) klassisches C schreiben. Super und raus kommt das tollste Codegemisch! Nichts ist schlimmer als ein Durcheinander aus objektorientiertem und prozeduralem Code Mischmasch. Entweder oder! Meine Meinung. Okto P. schrieb: > Glücklicherweise Programmiere > ich aber an sich sehr gerne, was mich dann auch dazu bewegt hat, ab und > an mal etwas in der Freizeit zu machen. Trotzdem wäre eine "fremde" > Programmiersprache wieder eine Fehlerquelle mehr. Dann bleibe bei C und versuche den Code sauber zu modularisieren und zu strukturieren. Den Übergang von C zu C++ macht man nicht mal einfach so. Dazu benötigen Leute die das beruflich 8h täglich machen locker Monate.
Udo Schmitt schrieb: > Dann bleibe bei C und versuche den Code sauber zu modularisieren und zu > strukturieren. > Den Übergang von C zu C++ macht man nicht mal einfach so. Dazu benötigen > Leute die das beruflich 8h täglich machen locker Monate. Vielen dank für die Worte! Wurde durch die letzten Posts doch noch etwas unsicher und habe mich gerade im Internet ein bisschen über C++ informiert. Bin da ganz deiner Meinung dass ich sowas wohl kaum in ein paar wenigen Tagen lernen kann. Allerdings muss ich sagen, hört sich schon sehr interessant an was damit alles machbar ist. Für dieses Projekt verzichte ich aber nun definitiv auf das ganze und entscheide mich für C. Wie du bereits geschrieben hast, lieber leg ich einen sauberen C Code hin, als ein Mischmasch zwischen beiden. Soll ja schliesslich auch verständlich für Dritte werden, denke kaum dass jemand meinen Code noch verstehen würde. Und selbst wenn, wäre er wohl kaum Optimal geschrieben. Somit ist für mich nun klar: Programmiert wird in C, dabei bleibt es. Zur Fernbedienung: Schema gerade noch einmal überarbeitet, beginne nun mit dem Layout. Vielleicht würds heute noch was ;)
Was hälst du von ein paar Befestigungslöchern auf der Platine?
Carsten M. schrieb: >>>C++, nehmt auf jeden Fall JavaScript oder PHP dafür > Wir programmieren Microcontroller. Keinen Core i7 ;-) > Die Sprachen sind bequem für den Programmierer und leistungsstark. Kein > Zweifel. Aber der Controller macht dann auch viel unnötiges Zeug. > > Standard C ist ein gute Zwischenlösung, in meinen Augen. Ironie und Sarkasmus sind nicht so deine Stärke?
Hm ... haben wir dich jetzt alle missverstanden?
Udo Schmitt schrieb: > Nichts ist schlimmer als ein Durcheinander aus objektorientiertem und > prozeduralem Code Mischmasch. Code, der das nicht ist, existiert nur an Hochschulen. > Entweder oder! Das ist Unsinn. Ein "Argument" fuer Dogmen und Paradigmen-Verteidiger, aber nicht fuer Problemloeser. > Dann bleibe bei C und versuche den Code sauber zu modularisieren und zu > strukturieren. Und genau dabei unterstuetzt einen C++ eben besser als C. > Den Übergang von C zu C++ macht man nicht mal einfach so. Dazu benötigen > Leute die das beruflich 8h täglich machen locker Monate. Jahre. Und wenn man nie anfaengt: Ewig.
Okto P. schrieb: > Vielen dank für die Worte! Egal wie gut das Argument ist, Hauptsache es geht in die gewuenschte richtige Richtung? Autsch.
Horst schrieb: > Was hälst du von ein paar Befestigungslöchern auf der Platine? Würde ich in der Tat auch für wichtiger halten als über den Compiler zu diskutieren :-)
Horst schrieb: > Was hälst du von ein paar Befestigungslöchern auf der Platine? Keine Sorge, die sind nicht vergessen gegangen. Mussten über das Wochenende noch besprechen wie wir das Teil befestigen, bzw wohin die Löcher sollen. Sind mittlerweile eingezeichnet. Layout poste ich diesmal kein neues, da sich bis auf die paar Löcher nichts verändert hat. Quack schrieb: > Okto P. schrieb: > >> Vielen dank für die Worte! > > Egal wie gut das Argument ist, Hauptsache es geht in die gewuenschte > richtige Richtung? Autsch. Wenn es dir nicht passt das er nunmal die selbe Meinung wie ich hat, dann kann ich das nicht ändern. Trotzdem behaupte ich mal, dass längst noch nicht alle die C++ können es auch richtig anwenden. Markus L. schrieb: > Würde ich in der Tat auch für wichtiger halten als über den Compiler zu > diskutieren :-) Ist es auch. An dieser Stelle ein letztes mal: Diskussionen zum Projekt sind durchaus erwünscht. Verbesserungsvorschläg, Kritik, whatever. Aber bitte hört auf über irgendwelche Programmiersprachen zu diskutieren. Wir programmieren in C, Argumente wurden genug genannt. Dabei bleibt es. Vielen dank.
Klar kennen wir! Sie wollen aber keinen MK kaufen, sondern einen selber entwickeln. Nur wenn du das gemacht hast, weist du später, wovon du sprichst.
:
Bearbeitet durch User
Angehängte Dateien:
-

OktoCtrl_Fertig.png
26 KB
Hallo! Keine Sorge, wir leben noch und das Projekt läuft. Zumindest mein Teil kommt voran. Denn während sich mein Projektpartner gerade auf Teneriffa am Sonnen ist bin ich fleissig am arbeiten. Akteuller Fortschritt: Die hauptleiterplatte welche die gesamte Steuerung des Kopters übernimmt ist nun fertig gestellt. Heute gerade den letzten Schliff verpasst, haben ein zwei kleine Dinge gefehlt wie I2C Pull-UP's und 3 LED's. Ansonsten blieb eigentlich alles beim alten... die Borlöcher werden noch etwas angepasst, muss ich mit Kumpel absprechen. Bestellt wird die Leiterplatte noch diese Woche (Voraussichtlich Sonntag) bei PCB-Pool. Wie siehts Software mässig aus? Auch hier tut sich einiges. Die Software für den Controller, welcher die gesamte Überwachung von Spannungen übernimmt ist mittlerweile fertig programmiert, allerdings noch ungetestet. Des weiteren existieren nun auf dem Papier erste Struktogramme wie ich den Code aufbauen will. (Ja, es gibt Leute die machen sowas noch... zwar nicht für mich, aber das Projekt soll ja für die nachwelt erhalten bleiben, deshalb wird auch eine Umfangreiche Dokumentation geschrieben). Sobald die Bestellungen der Leiterplatte & der dazugehörigen Komponenten gemacht ist, werden wir erste Auskünfte zu den Preisen dieses Teils des Projektes machen können. Dürfte also Anfang nächste Woche bekannt gegeben werden. Danach heisst es ein paar Tage warten bis alles da ist und dann ist es eine Frage von ein paar Stunden bis das Teil bestückt ist. ;) Wir hoffen die fertige Leiterplatte in der ersten Juliwoche in den Händen zu halten. Bis dahin eine schöne Zeit, geniesst das Wetter! Bis bald
:
Bearbeitet durch User
Hallo! Wie stehts um das Projekt - ich bin sehr interessiert, und habe schon lange nichts neues mehr gehört. Grüße Max
Übrigens - ist mir gerade aufgefallen: Wird das ganze jetzt ein Oktokopter wie im Threadtitel oder ein Quadcopter wie in dem Schema - wo 4 Motoren eingezeichnet sind.
Das Schema ist von mir und war nur so als Anregung gedacht. Ich glaube die Jungs bauen einen Achtfachen!
Hallo! Sorry das wir uns solange nicht gemeldet haben. Anscheinend wird die Zeit nicht gerade besser nach den Prüfungen. Bin aktuell auf Stellensuche und für den letzten Montag den ich noch hier angestellt bin, habe ich einiges zutun. Deshalb das ganz momentan nicht sehr aktiv. ABER! Ja, es läuft etwas. Mein Projektpartner ist braungebrannt aus Teneriffa zurück und beschäftigt sich derzeit mit dem Rahmen. Ich schreibe ihm nachher kurz eine SMS und frage ihn ob er mal ein Beinchen mitnehmen kann, dann gibts erste Fotos. Gefertigt wird der Rahmen übrigens aus Alu (Gewichtsmässig kein Problem, ein Arm ist leichter als der Motor selbst). Die Elektronik hinkt derzeit ein bisschen. Wir warten noch auf einige Komponenten. Die Software existiert derzeit nur zu einem kleinen Teil bereits auf dem PC, allerdings ist ein grosser Teil bereits auf Blatt realisiert. So sind wir uns mittlerweile einig, wie wir die Stabilisierung in der Luft umsetzen wollen und weitere Details wurden geklärt. Das mit den Fotos klappt irgendwie nicht so wirklich, vergesse es jedes mal wieder aufs neue Bilder zu machen. Diesmal gebe ich mir aber wirklich Mühe und hoffe euch bis Ende Woche erste Bilder präsentieren zu können. Maax schrieb: > Übrigens - ist mir gerade aufgefallen: > Wird das ganze jetzt ein Oktokopter wie im Threadtitel oder ein > Quadcopter wie in dem Schema - wo 4 Motoren eingezeichnet sind. Schlussendlich soll es ein Okto werden. In einer ersten Probeversion haben wir uns jetzt aber dazu entschieden erstmal nur einen Quadro zu bauen und diesen soweit zu entwickeln dass er einigesmassen gut fliegt. Danach erweitern wir direkt auf Okto. Gedanke dahinter war das Geld dass eine Rolle spielen könnte bei den ersten Testflügen. Lieber 4 Motoren als 8 Motoren die man ersetzen muss. ;) Vielen dank für eure Geduld. Wir hören uns! Gruss
So ein interessantes Projekt - schade dass sich nichts mehr tut.
> Diesmal gebe ich mir aber wirklich Mühe und hoffe euch bis Ende Woche erste
Bilder präsentieren zu können.
Maax schrieb: > So ein interessantes Projekt - schade dass sich nichts mehr tut. Wir arbeiten daran! Waren nur die letzten 6 Tage in Berlin im Urlaub und das mit den Fotos ging irgendwie auch ein wenig vergessen. Problem ist, dass ich meist von zuhause aus hier im Forum schreibe, das ganze Material allerdings beim Kumpel liegt. Geht jedesmal aufs neue vergessen endlich die Fotos zu machen. Der Rahmen nimmt allerdings langsam Form an, die Arme und die Halterungen für die Motoren sind fertig. Ich bemühe mich stark, endlich mal an die Fotos zu denken. Ansonsten heisst es momentan leider wieder einmal Warten. Ab nächster Woche sind wir beide Offiziell nichtmehr in der Ausbildung, für mich bedeutet dass dann erstmal eine Arbeitslose Zeit von 3 Wochen. In diesem knappen Monat werde ich mich voll und ganz dem Projekt hier wittmen können. Gruss
Hi Okto, ich würde gerne dazu beitragen und die IMU, GPS und Fluglageregelung integrieren. Würde das gehen ? MfG Ersan
Guten Morgen Erstmal: Tolle Nachrichten! Ich habe über dieses Wochenende endlich daran gedacht, ein paar Fotos zu schiessen von den Bisherigen Teilen die bereits vorhanden sind. Habe sie noch bei mir Zuhause auf einem USB Stick, die kommen aber die Tage. Cell85 schrieb: > ich würde gerne dazu beitragen und die IMU, GPS und Fluglageregelung > integrieren. Würde das gehen ? Hallo. Du kannst uns gerne helfen. Hast du denn bereits Erfahrungen in diesem Gebiet gemacht und hast du vielleicht bereits etwas derartiger Realisiert, oder würdest du das ganze von 0 auf Aufbauen? IMU & Regelung muss auf jeden Fall her, falls du dich doch nichtmehr beteiligen möchtest werden wir das die kommenden Wochen selbst realisieren. GPS war in einem ersten Schritt eigentlich noch nicht geplant, wenn du dir das allerdings zutraust und ein wenig Erfahrung damit hast, kann man durchaus mal darüber sprechen. Lass mir sonst mal eine E-Mail zukommen, wir nehmen mit dir Kontakt auf. Gruss
Angehängte Dateien:
-

Motorhalterung.jpg
430 KB -

arm.jpg
380 KB -

Montage.jpg
420 KB
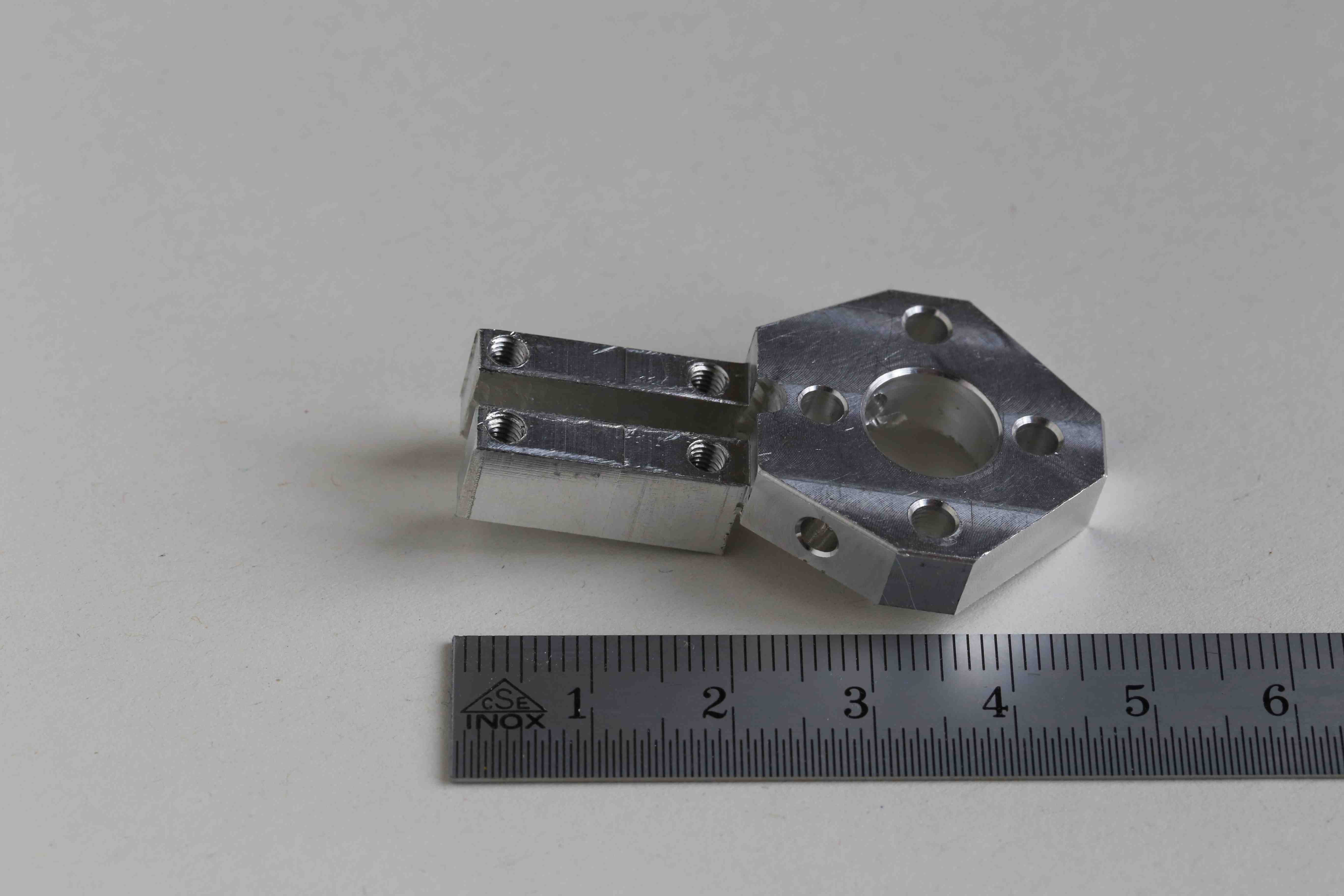

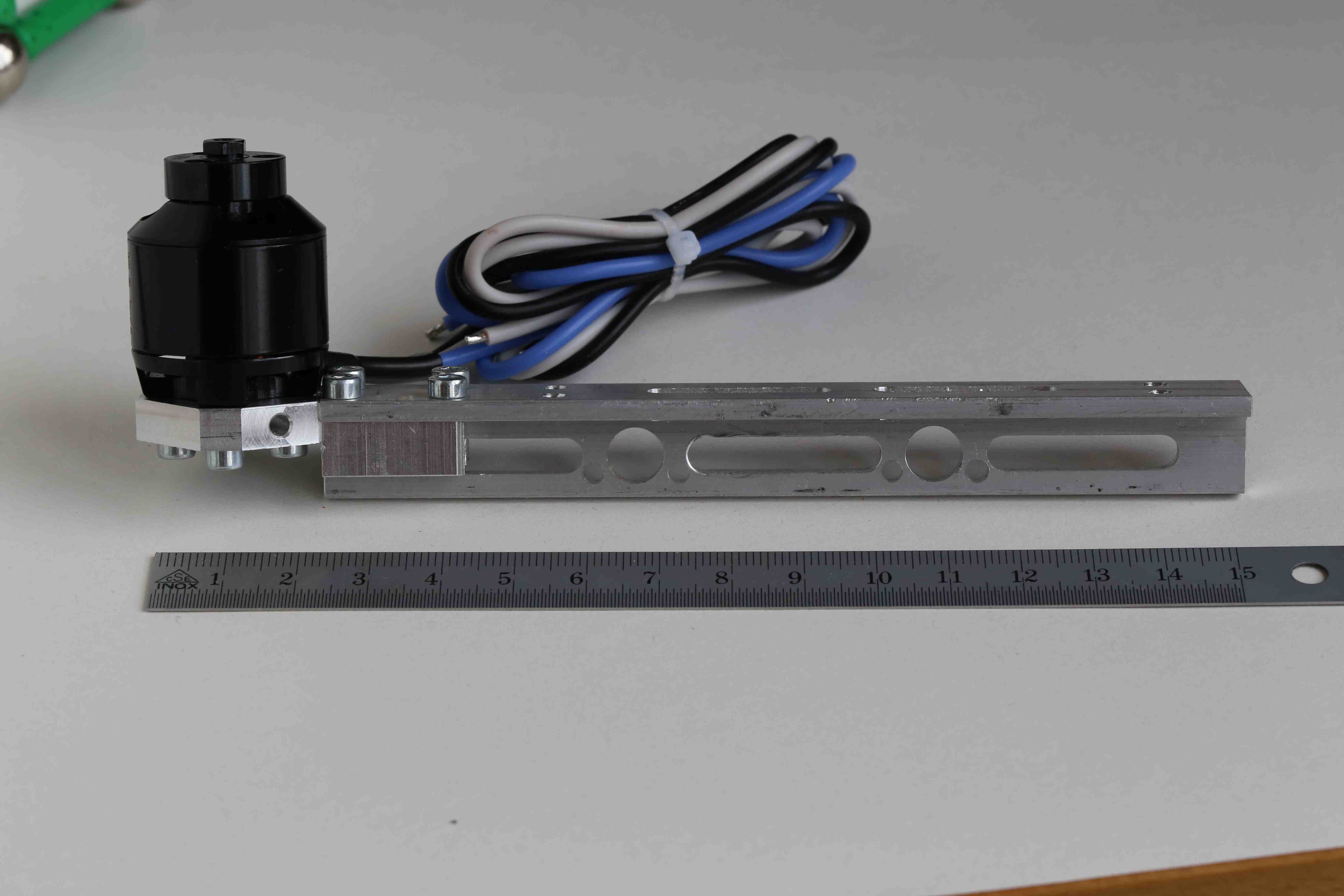
Guten Abend Es ist soweit, für einmal habe ich meinen Kopf bei der Sache, einen Laptop vor mir und die ersten Bilder des Rahmens gerade hier rumliegen. Poste ich das zeug mal. Hoffe das mit dem Bildformat klappt, nicht mein Laptop und schon recht nicht das Betriebssystem das ich sonst verwende (Gerade Linux am laufen). Sind zwar nicht die kleinsten, aber denke 400kB passt schon. Sonst soll sie doch bitte ein Moderator löschen, dann würde ich sie die kommenden Tage noch einmal neu hochladen. Baupläne für den Rahmen werde ich noch nachreichen. Dürfte allerdings klappen, hier mal eine kleine Beschreibung zu den Bildern: Bild 1: Motorhalterung Auf dem ersten Bild ist die Halterung eines Motors zu sehen. Gefertigt aus Aluminium. Bild 2: Arm Das zweite Bild zeigt einer der Arme, an welchen ausenenden der Motor befestigt wird. Das Teil ist wesentlich leichter, als es aussieht. Motorhalterung + Arm wiegen keine 20 gramm. Bild 3: Arm + Halterung + Motor So sieht das ganze fertig montiert aus. Gebe mir mühe die nächsten Bilder möglichst bald hochzuladen. Ihr seht, wir arbeiten dran! Auch wenn es nicht immer den Eindruck macht, aber wir sind dran. Ist nur ne gigantische Menge an Planung und Arbeit nötig um etwas zu erreichen, da wir mehr als nur einen simplen Kopter bauen wollen. Werde die kommenden Tage vielleicht das Konzept der Steuerung noch einmal überarbeiten und euch vorstellen und nach eurer Meinung fragen. Haben da eine tolle Idee, sind aber nicht sicher wie begeistert die Leute davon sind. Bald mehr! ;) Bleibt dran. Gruss
du könntest die motorhalterung sparen wenn du ein (oben) breiteres t-stück nimmst auf das der motor passt und den rest davon wegfräst - würde auch 4 stahlschrauben einsparen. nur ne unqualifizierte idee :)
Das sieht stabil aus, zu stabil für meinen Geschmack! Jedes Gramm mehr heißt weniger Flugzeit bzw. weniger Payload. Aber auf der anderen Seite nicht stabil genug, um sich nicht doch bei einem Absturz zu verbiegen. Vielleicht stürzt ihr ja nicht ab :-). Könnte man nicht gleich einen dünneren Winkel nehmen, anstelle Material auszufräsen, um Gewicht zu sparen?
c.m. schrieb: > du könntest die motorhalterung sparen wenn du ein (oben) breiteres > t-stück nimmst auf das der motor passt und den rest davon wegfräst - > würde auch 4 stahlschrauben einsparen. nur ne unqualifizierte idee :) Jede Idee ist willkommen! Dass das ganze aber in zwei Teile aufgeteilt wurde, hat einen Grund: Beträgt die Wunschgrösse des eigenen Kopters nun Beispielsweise 10cm mehr durchmesser, sprich jeder arm 5cm mehr, so ist man nicht dazu gezwungen das ganze Stück neu zu machen. So dürfte die grösse des Kopters relativ schnell varierbar sein (nach unseren Überlegungen zumindest). Ob das ganze so funktioniert wird sich ja dann zeigen. Carsten M. schrieb: > Das sieht stabil aus, zu stabil für meinen Geschmack! Jedes Gramm mehr > heißt weniger Flugzeit bzw. weniger Payload. Aber auf der anderen Seite > nicht stabil genug, um sich nicht doch bei einem Absturz zu verbiegen. > Vielleicht stürzt ihr ja nicht ab :-). > Könnte man nicht gleich einen dünneren Winkel nehmen, anstelle Material > auszufräsen, um Gewicht zu sparen? Auch dir danke für den Vorschlag. Nun vorab: Das ganze sieht wesentlich schwerer aus als es ist. Ein solcher Arm + die Motorhalterung wiegt gerade mal rund 1/3 des Gewichtes des Motors. Das Gewicht von Arm + Halterung liegt soweit ich mich erinnere bei knapp 19 Gramm, werde meinen Projektpartner nachher kurz kontaktieren, um nochmal nach dem genauen Gewicht zu fragen. Das mit dem dünneren Winkel habe ich mir mal notiert, werde ich heute Abend mal mit meinen Freunden besprechen, keine schlechte Idee. Musst aber auch wissen, das ganze ist unser erster Aufbau. Ich denke, bis wir wirklich was haben das gut fliegt und Stabil ist, wird sich dieser Arm bestimmt noch ein paar mal verändern. :) Natürlich haben wir uns zuerst überlegt: Woraus machen wir den Rahmen? Da gäbe es bestimmt noch wesentlich leichtere Varianten. Der Grund wieso wir uns für eine solche Variante entschieden haben ist folgende Überlegung: Was kostet wenig, ist einfach zu bearbeiten und haben die meisten Leute zur Verfügung? Da wir ja möglichst alles selbst bauen wollen, gehört da natürlich auch der Rahmen dazu. Dafür eignet sich diese Variante einfach Prima, weil sie sehr einfach nachzubauen ist, was schlussendlich das Ziel des Projektes ist. Trotzdem sind wir natürlich weiterhin offen für andere Vorschläge! Danke! Gruss
Angehängte Dateien:
-

rund_klemmi.png
10 KB
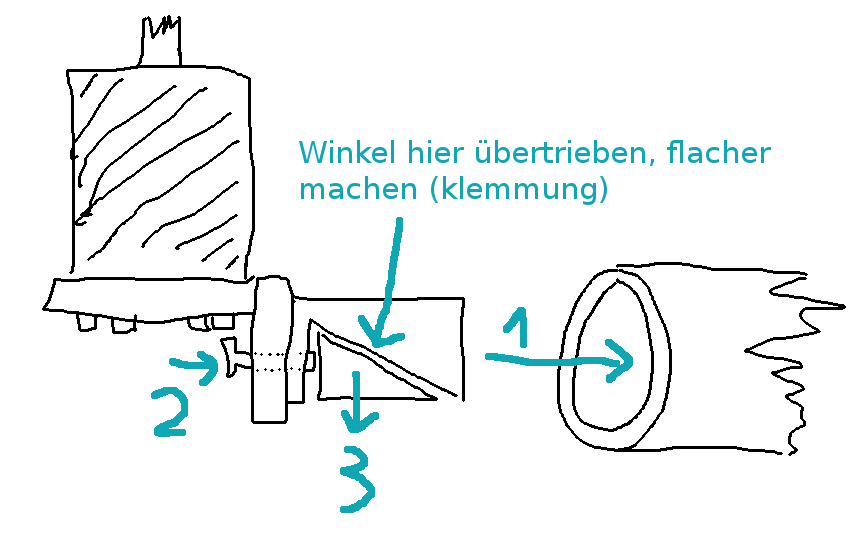
Okto P. schrieb: > Grund: Beträgt die Wunschgrösse des eigenen Kopters nun > Beispielsweise 10cm mehr durchmesser, sprich jeder arm 5cm mehr, so ist > man nicht dazu gezwungen das ganze Stück neu zu machen. ok, wie wäre es dann mit einem alu rohr (vierkant, oder rund)? durchmesser so 1 cm, wandstärke 1,5mm (oder was es halt im baumarkt zu kaufen gibt. dazu die motorhalterung als klemmverbindung. vorteil: leicht zu beschaffen, leicht abzulängen, stabil (auch verwindungssteif), geringerer luftwiderstand nach untern (im gegensatz zu der oberen fläche des t-trägers).
Das mit dem unbearbeitetem Rohr aus dem Baumarkt finde ich gut. Aber vielleicht ohne "fiddel" Klemmmechanismus - einfach so einkleben, dass mit Heißluft wieder lösbar.
Ohne Zeichnung, wie die mechanische Gesamtkonstruktion aussehen soll kann man ja nicht allzu viel sagen. Ich habe aber das Gefühl, dass das ganze heavy metal wird. Eventuell to heavy. Neben dem immer mehr in Mode kommenden 3-D-Druck kann man wunderbare Sachen aus einem Gemisch aus Glas- bzw. Karbonmatte mit Polyester machen. Frag mal die Flug- oder die Bootsmodellbauer. Das Zeug ist leicht, in praktisch jede beliebige Form zu bringen und dabei auch noch bezahlbar. Wie Alu hält es aber einen totalen Crash nicht aus.
Guten Morgen Sorry dass die Antwort so lange auf sich warten liess, über den Sommer an einem solchen Projekt zu arbeiten ist nicht ganz so einfach, vor allem der Teil mit der Forumaktivität klappt nicht so ganz. Wir haben uns vor einigen Tagen im Team zusammengesetzt und haben unser Konzept noch einmal etwas überarbeitet. Folgendes wurde entschieden: Rahmen - Die Teile des Rahmens erhalten eventuell eine andere Form (weniger Luftwiderstand). Beim Material bleiben wir wohl bei Aluminium. Auch wenn viele hier bedenken haben, das ganze werde zu schwer. Alleine der Motor wiegt derzeit rund 2 - 3 mal soviel wie ein solcher Aluminium Arm. Klar, man könnte durch anderes Material bestimmt nochmehr Gewicht sparen, allerdings ist Aluminium Günstig und leicht zu beschaffen. Deshalb bleibt es wohl dabei. - Die Sache mit dem 3D Drucker haben wir auch besprochen. Hatten wir uns ganz am Anfang sogar überlegt. Allerdings haben die wenigsten Leute ein solches Teil zur Verfügung und billig ist es auch nicht. Elektronik - Die gesamte Steuerelektronik wurde ein weiteres mal überarbeitet bzw. komplett neu gestaltet. Zu Beginn hatten wir die Idee, eine Leiterplatte zu erstellen auf der alles mit drauf ist. Von dieser Idee haben wir uns nun etwas DIstanziert und haben uns für einen Modularen Aufbau entschieden. Sprich: Es ist ein Board vorhanden mit einem Mikrocontroller. An dieses Board können diverse Module angeschlossen werden (IMU, GPS, Cam-Controller usw.) Der Vorteil dabei ist dass niemand an die von uns vorgegebene Hardware gebunden sein wird. Sprich, wenn jemand gerne ein anderes IMU verwenden würde, kann er dies ohne grösseren Aufwand tun. Für die Kommunikation der Module wird derzeit gerade ein System Programmiert. Das ganze wird auf SPI basieren. Ausserdem wird eine kleine PC Software vorhanden sein welche die Konfiguration erlaubt, wo welches Modul angeschlossen ist. Somit kann an jedem Steckplatz jedes Modul angeschlossen werden. Diese Hardware befindet sich derzeit noch in der Entwicklung, leider noch keine Bilder vorhanden. Hoffe allerdings dass diese im Laufe der nächsten Woche fertig wird. Gruss
Frank schrieb: > Ist das Projekt gestorben? Hat es denn gelebt? Also sind irgendwo (m)A geflossen? Ich glaube nicht...
Flieger, grüß mir die Sonne schrieb: > Frank schrieb: >> Ist das Projekt gestorben? > Hat es denn gelebt? Also sind irgendwo (m)A geflossen? Ich glaube > nicht... Das Projekt lebt und derzeit fliessen rund 40A durch die vier Motoren ;) Die aktive Projektvorstellung hier auf Mikrokopter wurde nur vernachlässigt, da es unserer Meinung nach ein bisschen zu viele Trolle gibt. Falls aber immernoch so grosses Interesse eurerseits bestehen sollte, dass das Projekt hier weitergeführt wird bzw. weiterhin hier dokumentiert wird, können wir das gerne tun. Aktueller Zwischenstand: - Quadro fliegt, derzeit wird der PID Regler noch etwas optimiert. Gruss.
10A pro Motor! Wie schwer ist die Kiste denn? :-)
Okto P. schrieb: > Die aktive Projektvorstellung hier auf Mikrokopter wurde nur > vernachlässigt, da es unserer Meinung nach ein bisschen zu viele Trolle > gibt. Gibt es vielleicht ein Blog o.Ä. wo ihr berichtet? Kommentarfunktion einfach ausschalten und einfach eure Inhalte einbringen so, dass es keine Diskussionen gibt.
Wir sind zurück! Wir haben lange nichts mehr von uns hören lassen. Wir haben nun vor einigen Monaten alle unsere Abschlussprüfungen erfolgreich bestanden und stürmen nun auf die nächste Etappe in unserem Leben zu. Nach einigen Wochen büffeln und den anschliessenden Ferien, sind wir nun wieder voll motiviert das Projekt endlich fertig zu kriegen. Christopher schrieb: > Gibt es vielleicht ein Blog o.Ä. wo ihr berichtet? Kommentarfunktion > einfach ausschalten und einfach eure Inhalte einbringen so, dass es > keine Diskussionen gibt. Derzeit nicht. Falls allerdings das Interesse bestehen sollte, dass wir einen solchen Blog einführen in welchem ihr über die Aktuellen Entwicklungsschritte auf dem laufenden gehalten werdet, dann können wir dies gerne tun. Eine Kommentarfunktion an sich ist toll, es gibt schliesslich viele User die sinnvolles Beizutragen haben... blos leider nicht hier. Trotzdem möchten wir den Leuten, die wirklich Interesse am Projekt haben noch eine Chance geben. Falls Interesse bestehen sollte, dass ein Blog eingerichtet wird, so lasst es uns wissen, wäre ja schliesslich schnell gemacht. Auch über Private Nachrichten stehe ich sonst gerne für Fragen zur Verfügung. Wir werden hier im Forum bestimmt das fertige Projekt irgendwann noch vorstellen, aber wie bereits erwähnt, verzichten wir weiterhin darauf hier aktiv zu bleiben, da uns die Community leider immer noch nicht wirklich zusagt. Hoffe ihr habt Verständnis dafür!
Ich wäre sehr an einem Blog zum abonnieren via RSS Feed interessiert.
Carsten M. schrieb: > 10A pro Motor! Wie schwer ist die Kiste denn? :-) Ca. 1,3kg mit Akku... ist halt noch die erste Version. Blogleser schrieb: > Ich wäre sehr an einem Blog zum abonnieren via RSS Feed interessiert. Okay, wir schauen uns das ganze mal an.
:
Bearbeitet durch User
Hallo, ist das Projekt noch aktuell? Ich möchte mir auch so ein Teil bauen und suche entweder einen Bausatz oder andere, gute Quellen. Dank KiCAD und entsprechender Dienstleister ist das ja prinzipiell auch fast komplett DIY machbar... Viele Grüße, Thomas
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.