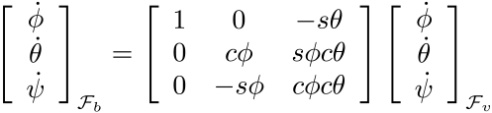
Hallo zusammen, ich habe eine Verständnisfrage, die ich sehr gerne hier stellen wollte. Darum geht es um die "Interpretation" der Werte, die meine IMU (hier ein Bild: http://www.watterott.com/de/AltIMU-10 ) liefert. Nun...die Platine funktioniert hervorragend und beim Drehen liefert genau die von mir erwartete Orientierung um alle 3 Achsen. Die Werte werden durch RS232 zu meinem Rechner ausgesendet und einmal da werden weiter verarbeitet. Gut! Laut dem Bild (Fig. 10) in diesem "Tutorial" http://www.intechopen.com/books/motion-control/intelligent-flight-control-of-an-autonomous-quadrotor sollte ich die eingelesenen Werte von einem Koordinatenssystem (meine IMU) zu einem festen Koordinatensystem durch die Implementierung der folgenden Transformationmatrix (sehe Anhang). Was ich mich frage... wozu transformieren? Angenommen dass ich meine Platine in dem Raum drehe, liefert die Platine schon die absoluten Winkel um alle 3 Achsen, oder? Zum Beispiel, nehmen wir an, dass ich die Platine perfekt horizontal halte und einen Moment später um 90° hoch um Y drehe. Und das ist auch der Wert, den ich auf dem Bildschirm lesen kann (die Daten werden durch serielle Kommunikation übertragen). Demzufolge brauche ich in der Tat keine Transformation. Doch habe ich mehere male gelesen, dass wenn ich die Werte in einem bestimmten Koordinatensystem einlese, dann müssen diese durch eine Transformation in ein andres Koordinatensystem überführt werden (beispielsweise von Frame{Platine} zum Frame{Boden}). In diesem Fall wüsste ich aber nicht, was und wie ich es transformieren soll. Ist die obige Matrix dann eine Identität? Ich hoffe, dass meine Frage verständlich ist. Gruß D.
Angehängte Dateien:
-

image34.png
11 KB
:
Verschoben durch User
Transformieren muss man ja nur wenn's von Interesse ist. Wenn nicht, dann eben nicht. Worum geht es denn ?
Ein Beispiel wäre die Vektorregelung (von Synchronmaschinen)http://de.wikipedia.org/wiki/Vektorregelung
Dave Anadyr schrieb: > Zum Beispiel, nehmen wir an, dass ich die Platine perfekt horizontal > halte und einen Moment später um 90° hoch um Y drehe. Und > das ist auch der Wert, den ich auf dem Bildschirm lesen kann (die Daten > werden durch serielle Kommunikation übertragen). Demzufolge brauche ich > in der Tat keine Transformation. Schön. Jetzt baust du deine IMU in ein Auto ein, welches in Serpentinen einen Berg hochfährt. Es ist schön, wenn du weisst, dass sich die Platine um 20° aus ihrer Ursprungslage nach rechts gedreht hat. Nur welchem Winkel entspricht das in Bezug auf die geographische Nord-Süd Richtung? Dein Auto ist am Parkplatz am Fusse des Berges nicht exakt eben gestanden, sondern der Parkplatz war abschuessig. Nicht immer hat man den Luxus, dass man mit einer Identitätsmatrix losstarten kann. Ist deine IMU in einen Quadrocopter eingebaut und möchtest du alle Korrdinaten in Bezug auf die 'linke' untere Ecke deines Zimmers haben (weil deine Pfadsuch-Software in diesem Koordinatensystem operiert), dann wirst du wohl kaum den Copter immer in dieser Ecke losfliegen lassen. Statt dessen startest du vom Tisch aus in einer immer gleichen Position, in der sich auch die IMU auf 0 initialisiert. Die Umrechnung von dieser Tischposition in die gewünschten Koordinaten des Zimmers ist genau diese Matrix.
Hallo!!! Danke für Eure Antworten. Ich habe nun verstanden...in dem Vecktor oben werden die Winkelgeschwindigkeiten, und nicht die Winkel, von einem Koordinatensystem zu dem anderen überführt. Es macht auch durchaus Sinn... Warum? Weil sich die Winkelgeschwindkeiten, die von der IMU vermessen werden, "ändern" wenn wir diese auf ein zweites Koordinatensystem projezieren würden (sehr schwer Darzustellen). Demzufolge werden zuerst die Winkel mit einem bestimmten Wert initialisiert. Dann folgt die Vermessung/Erfassung der Winkelgeschwindigkeit durch die IMU, und schließlich werden diese zum festen Koordinatensystem überführt. Die nach der Zeit abgeleitet Winkelgeschwindigkeiten werden nun integriert und den neuen Winkel (Theta, Psi, Phi)berechnet. Vielen Dank für Eure Hilfe!! Gruß
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.