Hallo, Die Steppertreiber treiben mich in den Wahnsinn (DRV8825) Laut DB soll man Reset und Sleep auf High setzen, Enable auf LOW. Gesagt, getan. Motoren zucken kurz, das wars. Schickt man nun Befehle passiert nichts. Trennt und verbindet man Reset und Sleep wieder passiert das selbe. Macht man es allerdings mehrmals klappt es dann irgendwann mal, die Stepper "halten" und gibt man dann befehle oder Pulse dreht sich der Motor. Trennt man jedoch die Versorgung und schaltet wieder ein das selbe prozedere. Kennt den Treiber jemand?
Wartest du auch beim Setzen der Pins entsprechen der Timing-Vorgaben? (siehe 7.6 Timing Requirements) Bei mir klappt es so zumindest.
:
Bearbeitet durch User
Rene H. schrieb: > Kennt den Treiber jemand? Ja, aber nur lt. DB und in Form eines fertigen Boards, das problemlos funktioniert. https://www.pololu.com/product/2132 Reset/Sleep liegt an einem Pin und wird zu Beginn des Programms nach einer kurzen Wartezeit auf High geschaltet, Enable an einem zweiten Pin, damit wird der Motor in Pausen stromlos geschaltet, zu Beginn auf Low.
Hi, also warten etc tue ich nichts. Sleep und Reset habe ich zusammengelegt. Enable mit GND am Arduino verbunden. Der Arduino bekommt Strom vom USB, die Stepper 12V 1A aus nem Netzteil. Wenn ich dann Sleep und Reset mit 5V vom Arduino verbinde zucken die Kurz. Mache ich das mehrmals hintereinander klappt es dann irgendwann.
Hi >Der Arduino bekommt Strom vom USB, die Stepper 12V 1A aus nem >Netzteil. Massen verbunden? MfG Spess
Timmo H. schrieb: > Wartest du auch beim Setzen der Pins entsprechen der > Timing-Vorgaben? > (siehe 7.6 Timing Requirements) Bei mir klappt es so zumindest. Rene H. schrieb: > Hi, also warten etc tue ich nichts. Und was passiert, wenn du Testweise statt Kabel Schuhbändel nimmst, oder das ganze mal unter Wasser ausprobierst? Vielleicht klappt es besser, wenn du überall ein paar Herzchen draufmalst... Im Ernst: auch wenn du einen Arduino benutzt, heißt das nicht, dass jeder X-beliebige ICs ohne irgendwas zu beachten funktioniert. Gerade das Wort "REQUIREMENT" sollte nicht als gut gemeinter Rat oder als "absolut unnötiger Scheiß" interpretiert werden.
:
Bearbeitet durch User
Step, dir etc das alles kein Problem. Ich habe noch EasyDriver v4.4 die kein Reset oder Sleep oder Enable haben und da klappt es ohne Probleme. Da ich aber mehr als 750mA brauche kamen die DRV8825 ins Spiel. Ja die Massen habe ich verbunden. Schalten will ich die Pins nicht. Also die wollte ich so anschließen das die immer Power haben. Somit Sleep und Reset auf 5V und Enable auf Low so das die immer eingeschaltet sind.
:
Bearbeitet durch User
Rene H. schrieb: > Die Steppertreiber treiben mich in den Wahnsinn (DRV8825) Selbst gebaut oder als fertiges Board? > Schalten will ich die Pins nicht. Also die wollte ich so anschließen das > die immer Power haben. Sollte so gehen, die Timingvorgaben dürften sich in erster Linie darauf beziehen, wann der 8825 den ersten Schritt nach Aufwachen und Aktivierung bekommen darf.
http://www.exp-tech.de/drv8825-stepper-motor-driver-carrier-high-current Den habe ich. Und dann halt so: 12V -> Steppertreiber VMOT und GND & 7805 7805 -> Reset und Sleep GND -> Enable Wenn ich die Verbindung zu RST und SLP mehrmals getrennt und verbunden habe halten die Motoren ja auch ihre Kraft. Dann kann ich mit 5 V auf Step "pulseartig" schritte ausführen. Auch ohne Arduino. Sagen wir mal, die initialisierung schlägt fehl. Ich habe 3 Stück davon. Bei allen das gleiche. Also einen defekt könnte ausgeschlossen werden. Zuerst dachte ich es liegt am Steckbrett. Also Buchsenleisten auf Lochraster, kabel dran, aber weiterhin dieses Problem.
:
Bearbeitet durch User
Angehängte Dateien:
-

DSC_1550.jpg
220 KB
So, ich habe das jetzt nochmal auf nem Steckbrett zusammengesetzt und was macht der Motor? Nichts. Verdrahte ich das EasyDriver Board geht es sofort auf Anhieb. Wie man sieht habe ich 3 Stück von den DRV8825. Die können doch nicht alle defekt sein.
Schrittmotor richtig angeschloßen? Taktest Du den Step Pin eigentlich? Wenn ja, dann wie? Füge mal den Teil der Software hier rein! Versuch doch erstmal ohne einen uC den Motor zum drehen zu bringen. Also Enable auf Masse ziehen, und mit einem Jumper Kabel den step pin mehrfach antickern..Wenn er sich dreht, dann ist Deine Software murks...wenn nicht, hast Du was an der Hardware.
:
Bearbeitet durch User
Hi. Habe ich ja so versucht, klappt nicht. Dann mal den EasyDriver angeschlossen mit nem Kabel an Step gespielt und er dreht sich. Wieder den DRV und nichts passiert. Alle 3, es passiert nichts :(
Am Poti der Strombegrenzung mal hin und hergedreht? Du hattest geschrieben, das der Motor hält, wenn du Enable auf low ziehst...Ändert sich dieser, wenn Du an der Strombegrenzung drehst?
Rene H. schrieb: > Dann mal den EasyDriver > angeschlossen mit nem Kabel an Step gespielt und er dreht sich. > > Wieder den DRV und nichts passiert. Hoffe Du hattest die Motorspannung ausgeschaltet bevor Du den Stepper akgeklemmt hattest?! Denn sonst geht dir der Treiber flöten
Also beim ersten test da ging das alles. Also vor 2 tagen, heute nochmal versucht, nichts mehr. Ähm, ich habe die nur aus dem Sockel gezogen. Gehen die so schnell "kaputt"? Jemand noch alternativen die man mit GRBL ansteuern kann und 2-3 A machen? Die EasyDriver sind zu schwach.
Rene H. schrieb: > Ähm, ich habe die nur aus dem Sockel gezogen. Gehen die so schnell > "kaputt"? Du hast hier: https://www.pololu.com/product/2132 gelesen? > Warning: Connecting or disconnecting a stepper motor while the driver > is powered can destroy the driver. (More generally, rewiring anything > while it is powered is asking for trouble.) Je nachdem welche Verbindungen zuerst den Kontakt verlieren, kann genau das passieren. > Jemand noch alternativen die man mit GRBL ansteuern kann und 2-3 A > machen? Die sind doch ok, nur musst Du ein paar Vorschriften beachten, aber das musst Du bei anderen Treibern auch.
Rene H. schrieb: > Na dann nochmal welche Ordern :( Bei Ebay 171666157261 aus Deutschland könntest Dur Dir die Versandkosten sparen, aus China wären 5 Stück um die 12.- Euro, 321657929234.
Hier: http://www.ebay.de/itm/221714083529 1 Euro pro Stück, kostenloser Versand. mit Kühler: http://www.ebay.de/itm/361240280436 1.38 Euro pro Stück, kostenloser Versand.
:
Bearbeitet durch User
Angehängte Dateien:
-

DSC_1551.JPG
220 KB
Danke :) Schon bei Amazon geordert. 10 stück für 29Euro. Versand über Prime. Dienstag da :) Im Anhang mal ein Bild. So ist es korrekt, oder? Dann noch was :) Die Motoren möchte ich mit einem Ringkerntrafo versorgen. Der Ringkern hat 2 x 18V 3,333A Sekundär. Wie ist es nun besser? Parallel schalten um 18V 6,666 A zu erhalten, dann gleichrichten, glätten und in die Schaltung? Oder auf 36V 3,333A? Was ist nach dem gleichrichten GND? Der Ringkern soll die Motoren, den Arduino (GRBL) und das BTM222 versorgen um eine serielle Verbindung per Funk aufzubauen. Habe mit Gleichrichtung bisher nicht gearbeitet.
Ich hoffe du hast noch einen Gleichrichter und eine entsprechende Glättung.
Was meinst du mit "noch einen"? Also ich würde 2 10.000uF Elkos nehmen und einen 80BC.... brückengleichrichter.
Hi >Also ich würde 2 10.000uF Elkos nehmen und einen 80BC.... >brückengleichrichter. Na dann kannst du ja ganz leicht die Höhe der gleichgerichteten Spannung ausrechnen. MfG Spess
Solche ein Schaltnetzteil ist doch besser als ein Transformator, weniger Abwärme und stabile Spannung. 24V / 6.25A für 14,29 € http://www.ebay.de/itm/391063821598 24V / 5A für 15,99 € http://www.ebay.de/itm/191255826057
Ja nur welche Art ist nun besser? Die Sekundärspulen parallel schalten und gleichrichten oder in Reihe? In Reihe (18V x 2) x 1,414 Parallel 18V x 1,414 Parallel hätte ich nun 18V x 1,414 und 6A Würde ja passen wenn jeder Motor mit 2A betrieben werden soll, ok. Aber wo ist da 0? Das gleiche bei Reihenschaltung, wo ist 0? Ich habe ja bei Reihenschaltung -18V 0 +18V Die Mittelanzapfung ist hier 0 (GND), wie ist es aber bei der parallel schaltung? Gilt - (minus) am Brückengleichrichter als 0 also GND? Denn dann wäre es ja gut :) Parallel zusammenschalten, gleichrichten, - als GND, + in die Motortreiber und in den 7805 für den Arduino sowie in den LF33CV für das BT Modul. Dann wiederum verstehe ich jedoch nicht wie ich den Motorstrom vom Schaltungsstrom trennen soll.
Angehängte Dateien:
-

DSC_1553.jpg
220 KB -

DSC_1554.jpg
240 KB
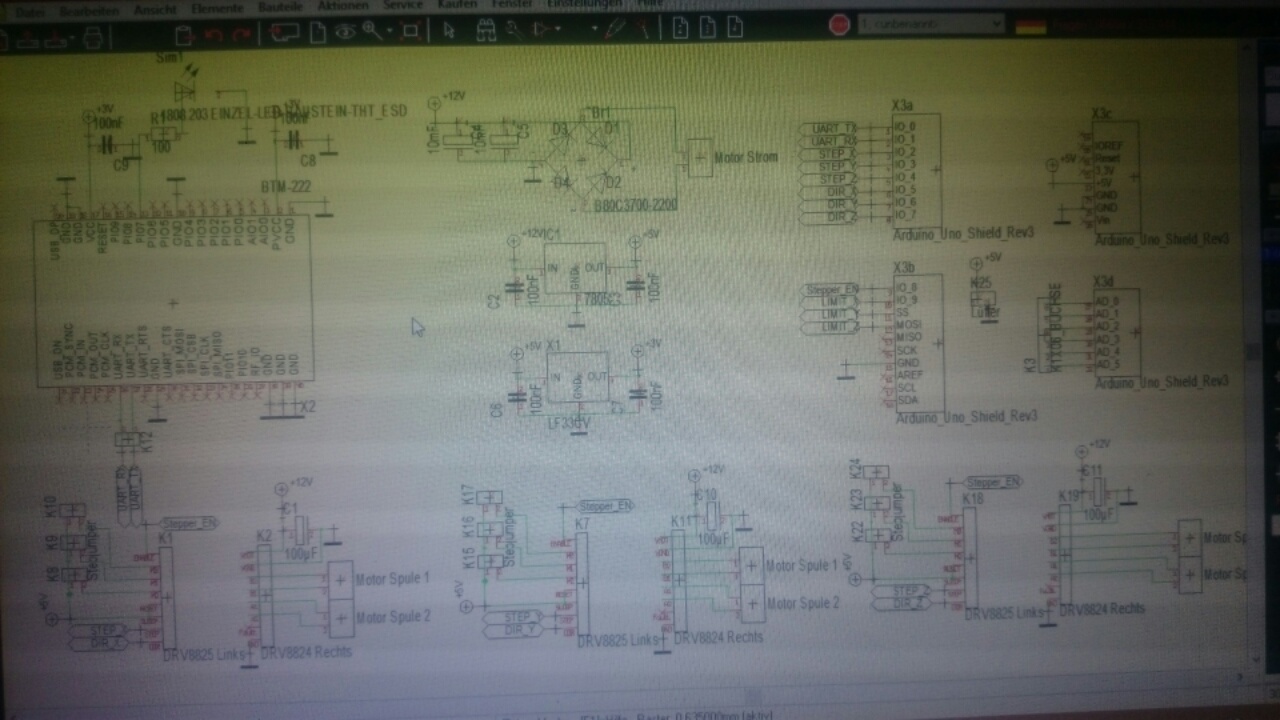
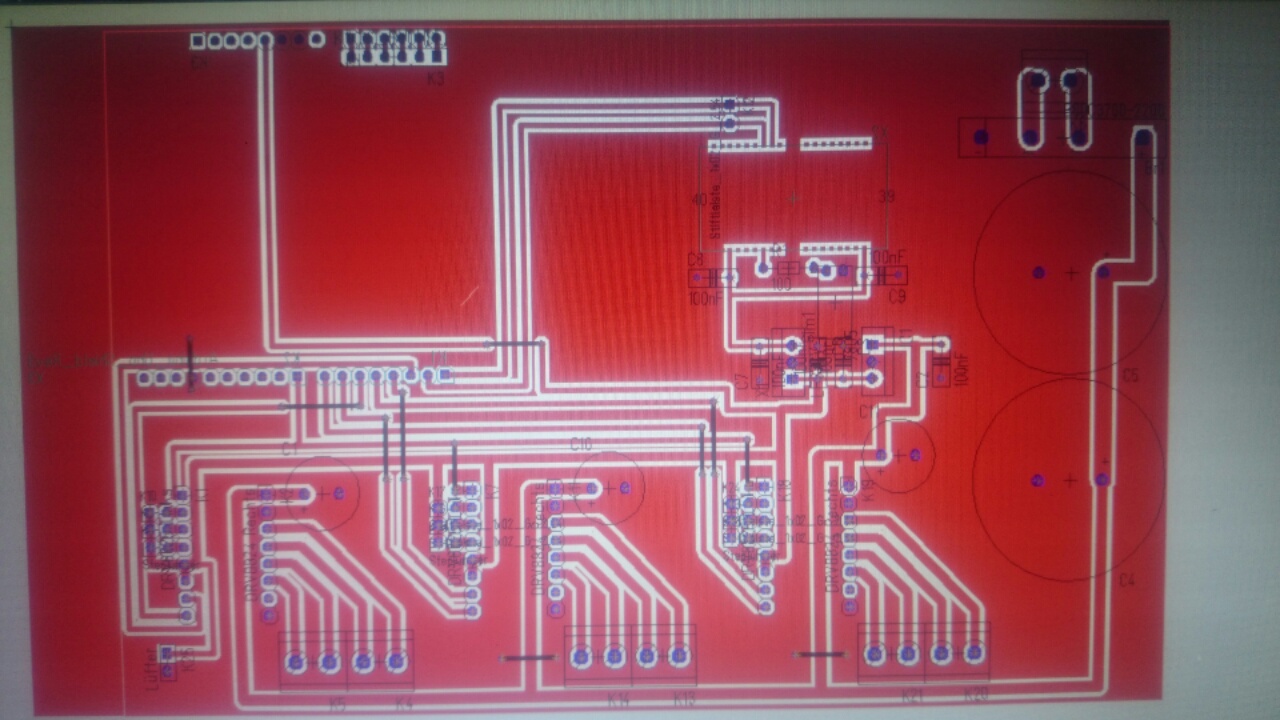
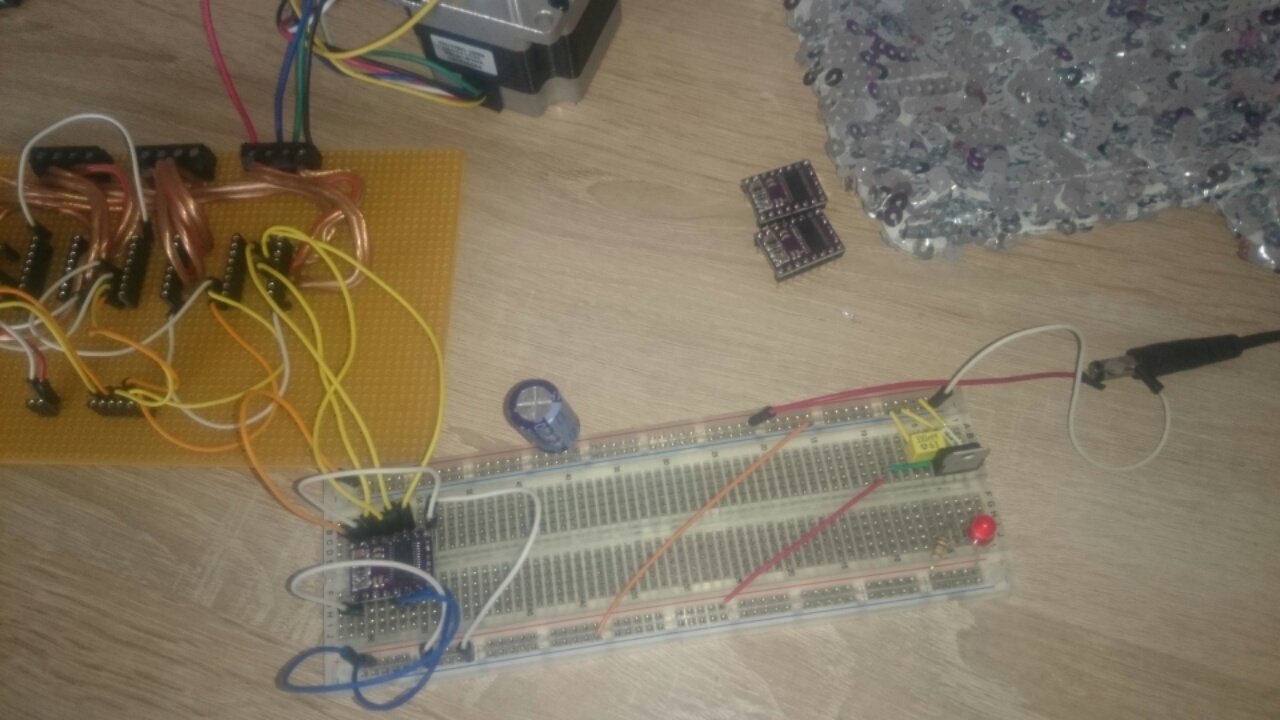
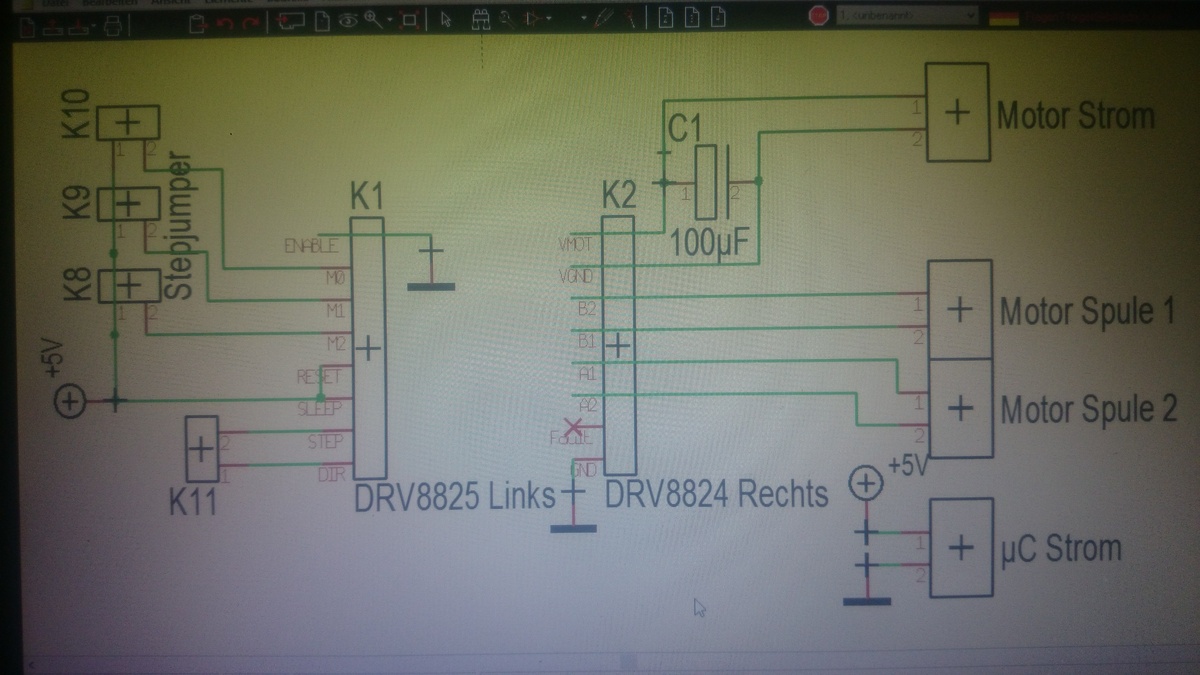
So, ich habe mir dann mal ein Motorshield gebastelt. Spannungsregler 7805 und LF33CV BTM 222 für Bluetooth verbindung (UART) Arduino Uno sockel für GRBL (über UART am BTM verbunden) 3 x DRV8825. EN liegt am Arduino am Stepper Enable Pin. Reset und Sleep konstant auf High. Brückengleichrichter und zwei 10.000uF Elkos zum Glätten. X Y Z anschlüsse von links nach rechts. :) Morgen kommen die neuen DRV8825. Hoffen das klappt dann :)
> DSC_1553.jpg
Weshalb machst du immer ein Foto anstatt eines Screenshots?
Da gibt es die Taste "Drucken" auf deiner Tastatur, drück da mal rauf
und öffne ein Grafikprogramm, dann fügst du das Bild welches noch im
Zwischenspeicher ist in das Grafikprogramm ein.
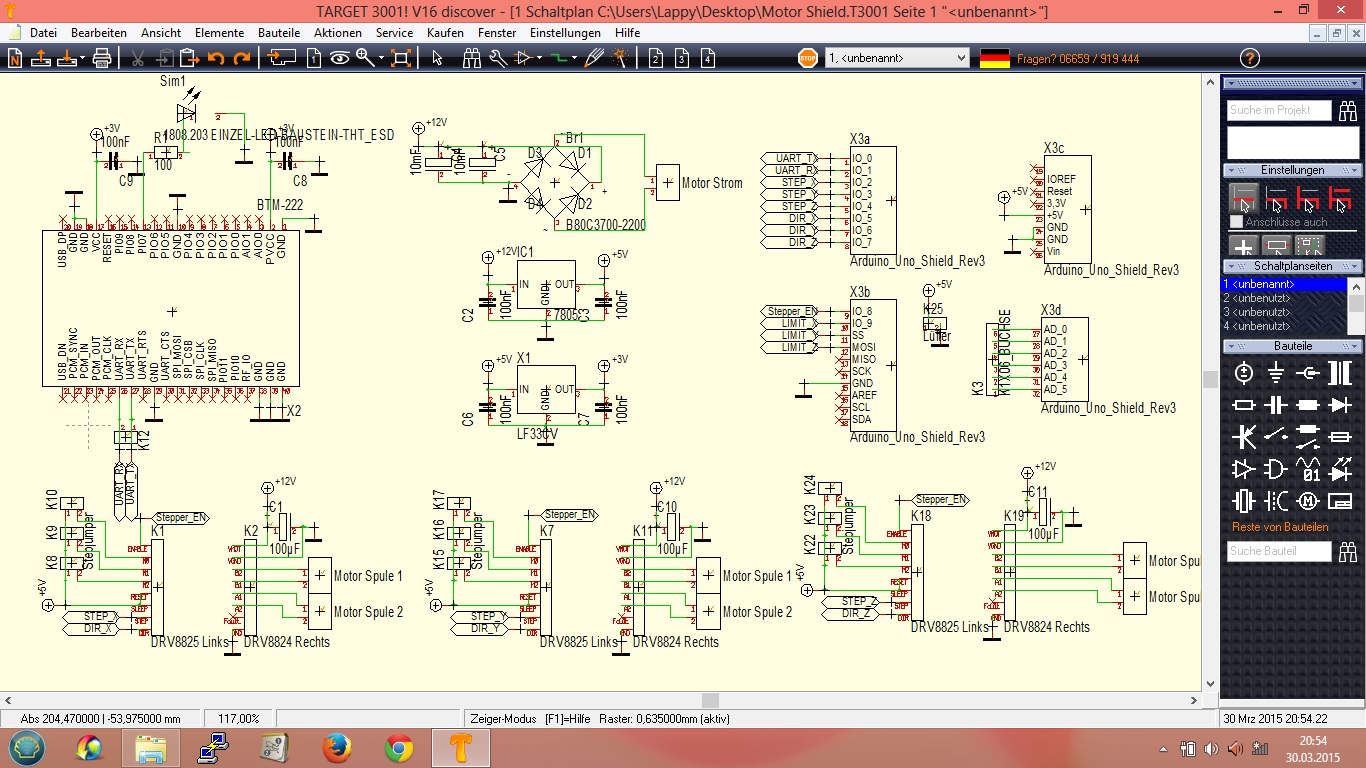
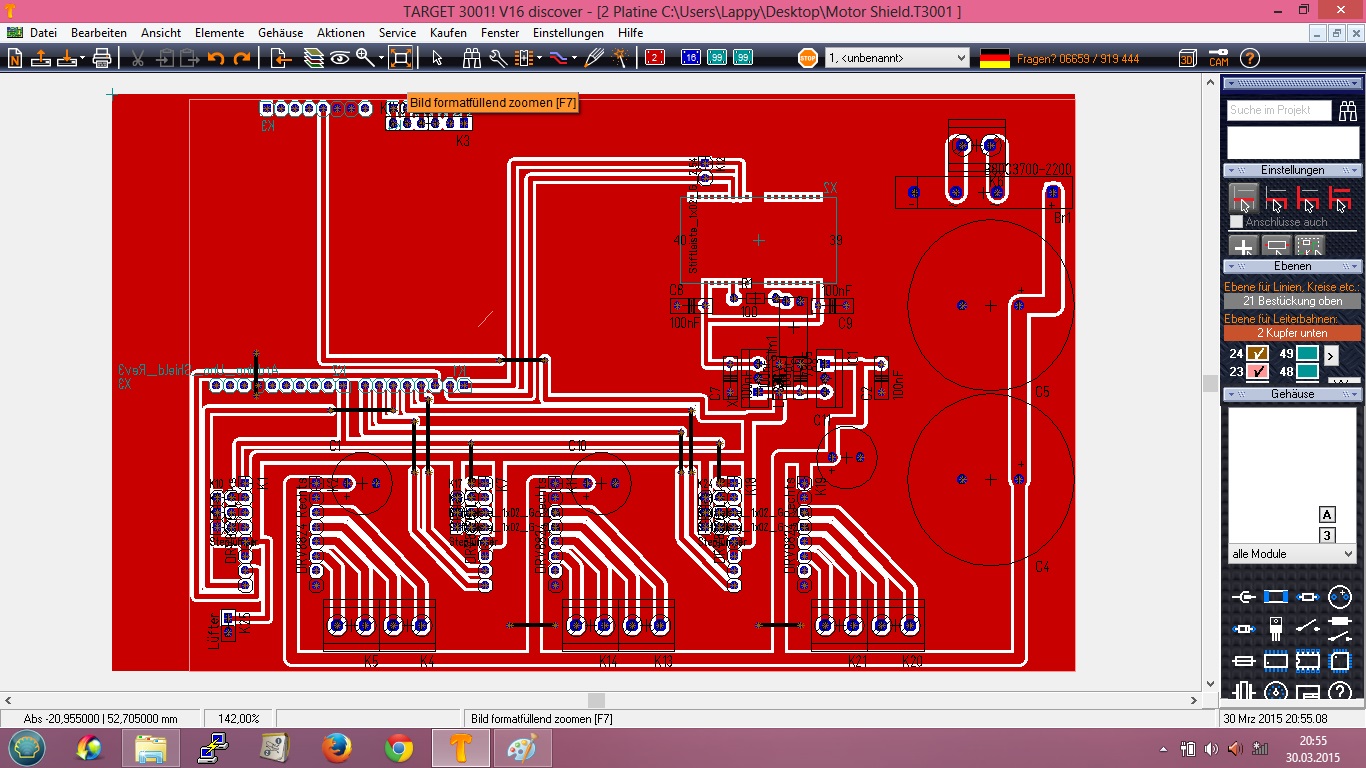
So. Ich hoffe ist so richtig.
Unfassbar dass dem Rene hier noch jemand helfen mag. In seinem anderen Thread "Projekt: CNC Fräse eigenbau" ist ihm bereits mehrfach gesagt worden welche gescheiten Treiber-Boards und welches Schaltnetzteil er kaufen soll. Das hat ihn aber alles die Bohne interessiert und gekauft hat er dann nur Käse für seine Käsefräse. Jetzt hat er schnell hier diesen neuen Thread aufgemacht und schon fallen Dumme auf den Typ rein.
Recht interessant die helfenden User hier als "dumm" zu bezeichnen und das auch noch auf eine feige Art als "Gast".
Angehängte Dateien:
-

CIMG2804.jpg
93 KB -

CIMG2805.jpg
110 KB -

CIMG2806.jpg
72 KB

Hier mein Testaufbau. Bis jetzt nichts abgeraucht. Inbetriebnahme mit Labornetzteil und Strombegrenzung. Dann dürfte nichts passieren. (Wollte deinen Thread nicht kapern, aber du hattest in dem anderen Thread um Bilder gebeten.) Gruß Frank
Angehängte Dateien:
-

IMG_5932c.jpg
250 KB
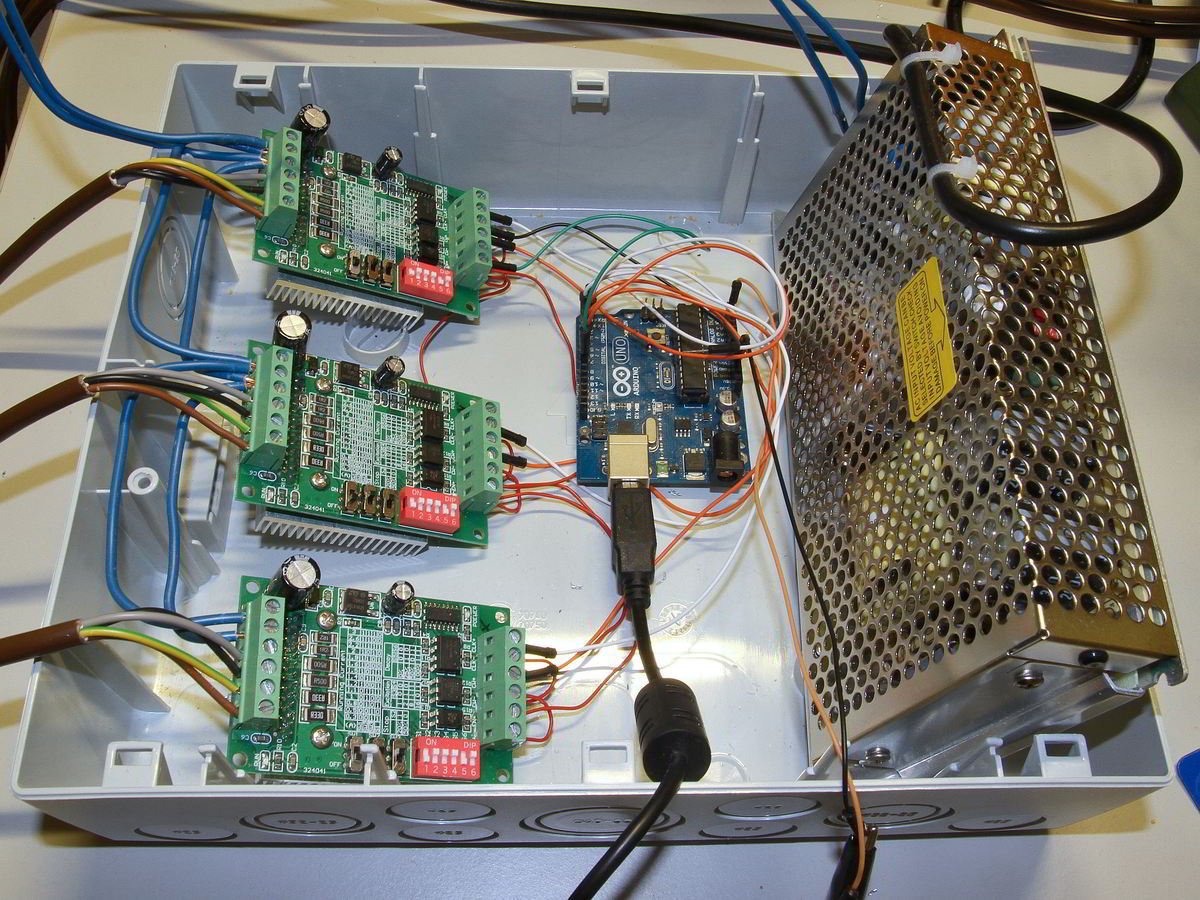
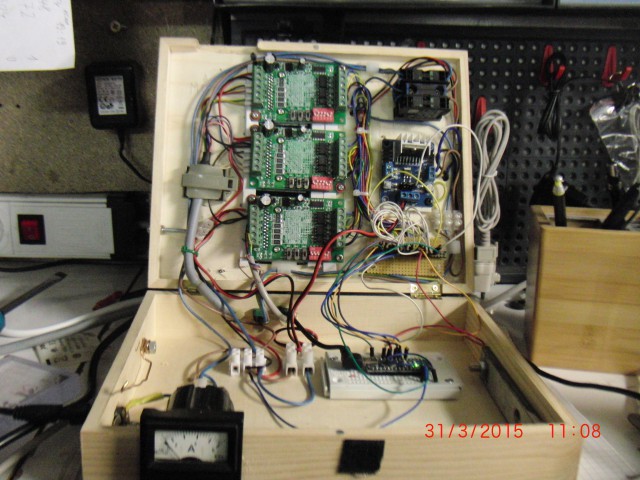
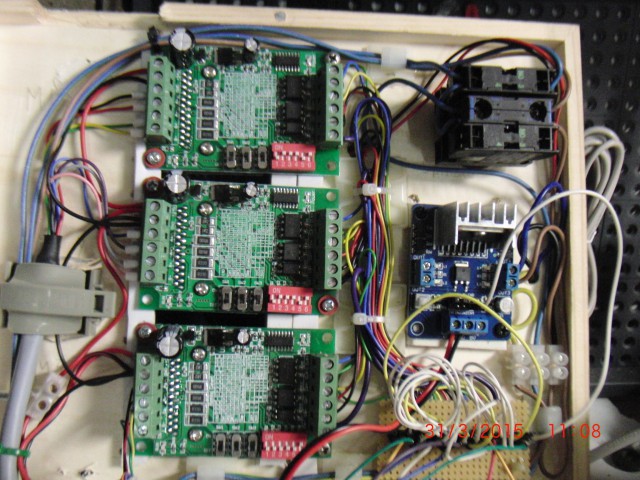
Hier bei mir vor dem Einbau in ein Gehäuse. Die Stepper Driver haben jeweils 8 Euro gekostet und das RS150-24 (24V/6A) Schaltnetzteil 22 Euro.
Kannst du noch mal kurz erklären was wir da auf den Bildern sehen. Scheinbar sind das drei größere Schrittmotortreiber, ein Controllerboard auf einem Steckbrett, eine blaue Platine und eine Experimentierplatine mit einer Buchsenleiste. Wo führst du die Kabel für die Motoren lang?
Angehängte Dateien:
-

CIMG2812.jpg
76 KB -

CIMG2813.jpg
68 KB
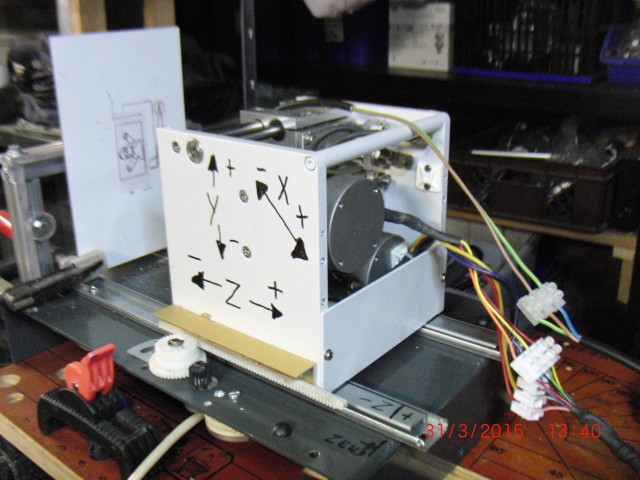

Falls die Holzkiste gemeint war: 1x Controller: http://www.amazon.com/SainSmart-Nano-v3-0-Compatible-Arduino/dp/B00761NDHI 3x Treiber mit TB6560:http://www.miniinthebox.com/de/tb6560-single-axis-3a-stepper-motor-driver-green-10-35v_p643033.html?currency=EUR&litb_from=paid_adwords_shopping&gclid=CNa41tnL0sQCFagKwwoddb0Ajw 1x Treiber für Bohrer: http://www.google.de/imgres?imgurl=http%3A%2F%2Fimage.dhgate.com%2Falbu_131204228_00%2F1.0x0.jpg&imgrefurl=http%3A%2F%2Fwww.dhgate.com%2Fstore%2Fproduct%2F20-pcs-lot-l298n-stepper-motor-driver-controller%2F104909249.html&h=600&w=600&tbnid=2oDzLW-wcPg35M%3A&zoom=1&docid=KmuugDrrxQd6BM&ei=PJMaVaDDBo3APPHVgZgK&tbm=isch&iact=rc&uact=3&dur=1297&page=3&start=48&ndsp=25&ved=0CPwBEK0DMEc Firmware: https://github.com/grbl/grbl/wiki/Configuring-Grbl-v0.9 Software: Beitrag "Projekt: SerialComCNC Serielles Frontend für CNC GRBL mit ATMega" Kabel werden nach hinten herausgeführt. Gesteuert wird eine kleine X-Y-Z Vorrichtung: Der Kasten ist eine X-Y Einheit aus einem Nadelpräger. Die Z-Achse besteht aus Schubladenschienen,DVD-Schubladenantrieb, Druckergetriebemotor. Will testen, ob ich das Thema weiterverfolge. Wenn man was gescheites haben möchte, kostet das ja einiges.
Frank G. schrieb: > Will testen, ob ich das Thema weiterverfolge. Wenn man was gescheites > haben möchte, kostet das ja einiges. Also ich möchte wirklich nur eine XYZ-Maschine die mir SMD Bauteile auf eine Platine setzen kann, dazu ist nicht viel Kraft erforderlich und die Maschine muss auch nur eine 10x10cm Fläche oder lieber 16x16cm Fläche abfahren können. Mehr Fläche ist gar nicht notwendig da ich nie so riesige Platinen herstellen lasse, sondern immer nur relativ kleine. Die Genauigkeit sollte aber so sein dass ich ein 0603 Bauelement auf die Paste setzen kann. Eine kleine Webcam zur Kontrolle sollte man auch an die Z-Achse anstecken können und sie sollte auch um 360° um die Kanüle drehbar sein, damit man das Bauelement von allen Seiten betrachten kann bevor man es in die Paste setzt. Der Innenraum sollte weiß sein und einige weiße LEDs sollen alles schön ausleuchten damit man dann am Monitor ein klares, rauschfreies Bild hat. Ich spreche hier nicht von automatischer Bestückung, sondern von manueller Bestückung mit einem Hilfsmittel welches einem die Arbeit etwas erleichtert und mit der man auch den Löterfolg begutachten kann. (mit einer guten Webcam, viel Licht und nahem Fokus sieht man dann doch etwas mehr)
Angehängte Dateien:
-

DSC_1555.jpg
220 KB

So, heute alles bekommen, zusammengebaut und was is? Nichts. 2 von 5 DRV8825 gingen garnicht. Einer ging dann endlich. Juhu. Tests gemacht, motor hin und her drehen lassen. Top. Strom ausgesteckt. 30 min später eingesteckt und nichts geht mehr. Neuen DRV8825 genommen und es geht. Die können doch nicht einfach so kaputt gehen!? Also mit den teilen kann doch was nicht stimmen.
Poti richtig eingestellt? Timing eingehalten? Meine gingen auch erst nicht bis ich auf die Initialisierung geachtet habe siehe Post #2
Hi, sleep und reset konstant auf 5V. Enable wird durch den Arduino und die GRBL lib gesetzt. Das klappte ja auch bis ich die Versorgung trennte, gewartet habe und wieder eingeschaltet habe, ohne sonst irgendwas zu verändern und dann ging es nicht mehr.
Rene H. schrieb: > Enable wird durch den Arduino und > die GRBL lib gesetzt. wie kommst du da drauf? träum weiter
$4 - Step enable invert, bool By default, the stepper enable pin is high to disable and low to enable. If your setup needs the opposite, just invert the stepper enable pin by typing $4=1. Disable with $4=0. Es es ging ja auch. Die lib setzt enable pin, bewegt den motor, setzt enable pin. Je nach config high to low oder low to high Aber wie schon gesagt ging es ja.
Ich würde den Stepper-Driver enabled lassen. Weil: Bei Deinem Winzig-Driver-Board bekommen die Schrittmotoren bei "disable" bestimmt keinen Haltestrom mehr. Bei den grünen 12 Euro driver Boards kann man den Haltestrom einstellen, aber Du musstest ja unbedingt diese Spielzeug-Driver kaufen.
hm schrieb: > Ich würde den Stepper-Driver enabled lassen. Also ich habe hier so eine durchsichtige Folie, sie dient als optischer Linearencoder, es gibt 5 Striche pro einem Millimeter, also kann ich meine Position auch wieder finden wenn ich Schritte verliere oder sich der Motor durch eine andere Kraft bewegen sollte, daher ist ein Haltestrom nicht erforderlich. Alternativ bringe ich runde Scheiben-Encoder direkt an den Motorachsen an, so kann ich genau bestimmen ob er gerade einen Schritt gemacht hat.
Angehängte Dateien:
-

DRV8825_Top_Side.jpg
140 KB -

DRV8825_Bottom_Side.jpg
130 KB
{kind=link}
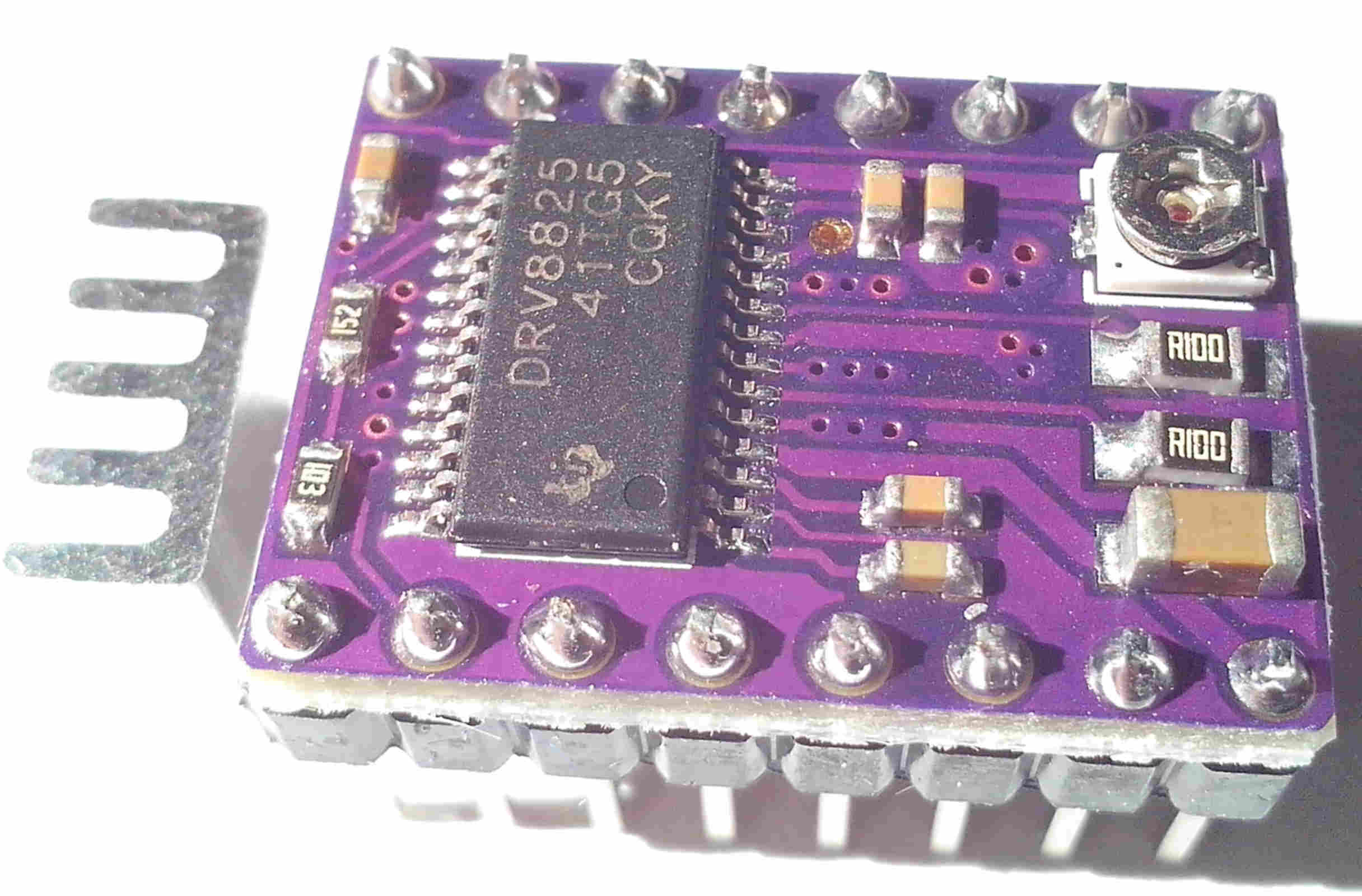
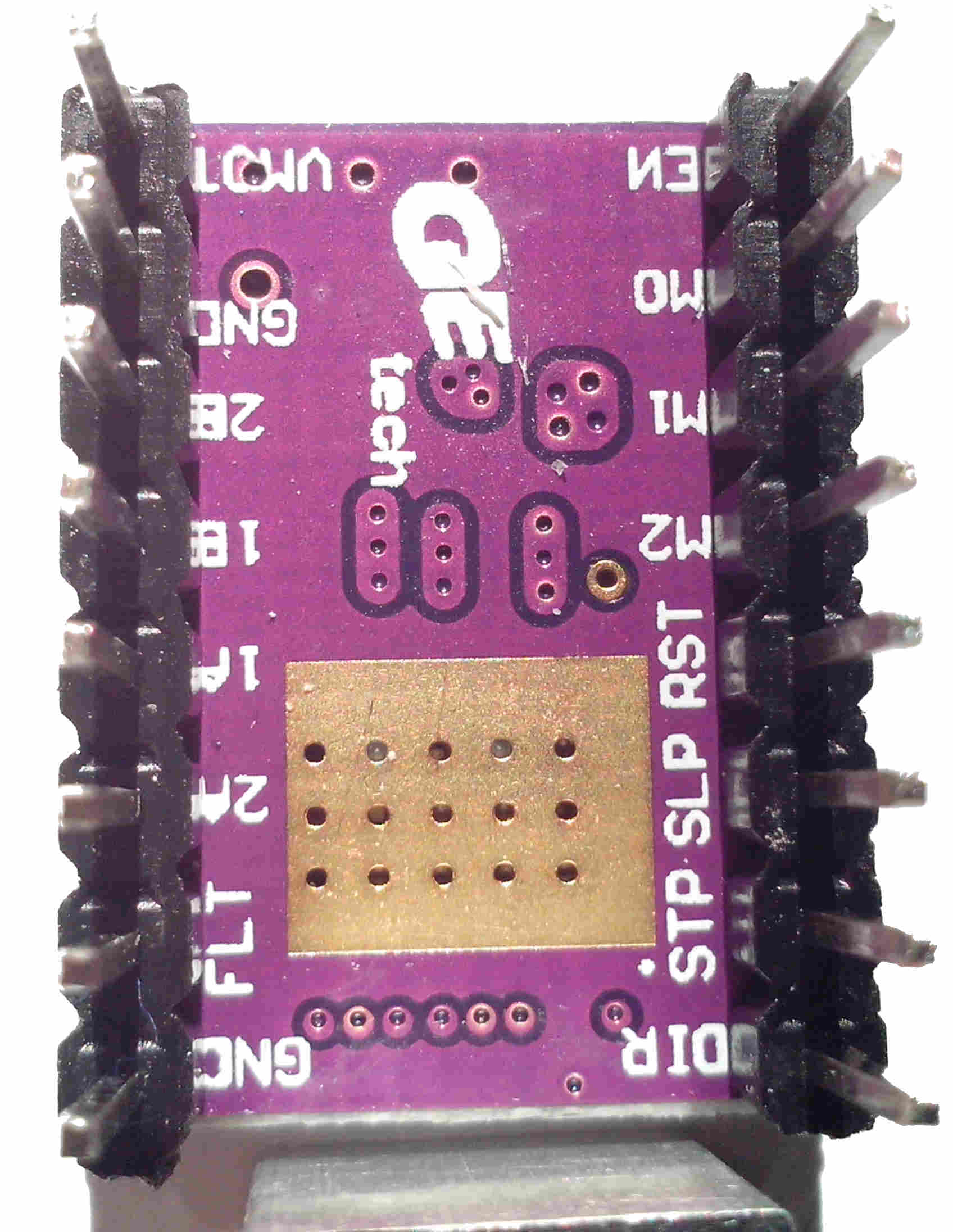
Mike J. schrieb: > Hier: Ebay-Artikel Nr. 221714083529 > 1 Euro pro Stück, kostenloser Versand. Ich habe meine 5 Stück DRV8825 jetzt bekommen und die Kühlkörper haben sie auch dazu gelegt. (Versandzeit: 9 Tage)
:
Bearbeitet durch User
Schon krank irgendwie, bei Mouser etc. Zahlt man selbst noch >$2 bei der Annahme von 1000 alleine fürs IC
Mike J. schrieb: > Ich habe meine 5 Stück DRV8825 jetzt bekommen und die Kühlkörper haben > sie auch dazu gelegt. Die Boards sind eine bescheuerte Konstruktion: Die Kühlkörper gehören dummerweise unter das Board auf die Metallfläche. Viel Spass dann bei der Platzierung des Boards.
Timmo H. schrieb: > Schon krank irgendwie, bei Mouser etc. Zahlt man selbst noch >$2 bei der > Annahme von 1000 alleine fürs IC Das tollste ist ja dass ich für die 5 Stück genau 5 Euro gezahlt habe, aber der Wert (wahrscheinlich wenn ich es direkt in China gekauft hätte) liegt bei 2 US$, also 40 US Cent pro Modul und dabei machen die noch Gewinn. hu schrieb: > Die Kühlkörper gehören dummerweise unter das Board auf die Metallfläche. Die Produktionsfirma der Chips wird damit gerechnet haben dass die Wärme nur an das Board angegeben wird, aber da das Board so klein ist muss die Wärme anders weg. Man hat dort unten ja Platz, da dort ja die Stecker/Buchsen sind. Meinen Kühlkörper werde ich aber oben auf die Chips hochkleben damit der Lüfter dort die Luft drüber verwirbeln kann. Die Epoxy-Schicht zwischen dem Chip und der Gehäuseoberseite ist aber recht dünn, daher sehe ich es nicht als Problem an die Wärme ausreichend gut abführen zu können.
:
Bearbeitet durch User
Rene H. schrieb: > 7805 -> Reset und Sleep Sei mal etwas vorsichtiger mit der Spannung an de I/O-Pins, im Datenblatt steht dass dort maximal 4 Volt anliegen dürfen, besser ist es wahrscheinlich wenn dort nur 3.3V anliegen. MWS schrieb: > Du hast hier: > https://www.pololu.com/product/2132 > gelesen? > >> Warning: Connecting or disconnecting a stepper motor while the driver >> is powered can destroy the driver. (More generally, rewiring anything >> while it is powered is asking for trouble.) Man kann das Modul aber auch ohne Steppermotor betreiben um die Referenzspannung für den Strom einzustellen.
Mike J. schrieb: > MWS schrieb: >> Du hast hier: >> https://www.pololu.com/product/2132 >> gelesen? >> >>> Warning: Connecting or disconnecting a stepper motor while the driver >>> is powered can destroy the driver. (More generally, rewiring anything >>> while it is powered is asking for trouble.) > > Man kann das Modul aber auch ohne Steppermotor betreiben um die > Referenzspannung für den Strom einzustellen. [ ] Du verstehst die Übersetzung und was diese im Kontext bedeutet. [ ] Du wolltest nur irgendwas schreiben. Und hier noch'n X zum einsetzen.
Also ich habe oben sowie unten einen Kühlkörper montiert. Zusätzlich einen 80mm PC Lüfter für die drei Treiber verbaut. Jedoch reicht selbst das nicht aus die Wärme abzuführen. Ich habe 2 Treiber auf ca 50% Strom eingestellt, einen, da der Motor mehr kraft braucht auf ca 70%. Bei diesem kommt es immer zu aussetzern, also der Chip schaltet wegen überhitzung ab. Nach 2-3 sek. läuft er wieder für 10-15sek und wieder Thermal Shutdown. Ich kriege die Wärme einfach nicht abgeführt. Der Luftstrom des Lüfters geht oben sowie unterm Chip entlang.
Warum beweinst Du deinen Käse in 2 Threads ( Beitrag "Projekt: CNC Fräse eigenbau" )? Dir wurde doch schon ganz zu Begin gesagt, dass diese winzigen Driver Boards nicht geeignet sind. Jetzt heulst Du hier rum weil sie, wie Dir voausgesagt, überhitzen. DU bist und bleibst unbelehrbar. Wie sagt man: Wer nicht hören will muss fühlen. Kauf die empfohlenen grösseren Treiber Boards und gut ist, aber nerv nicht hier rum.
Bei einer CNC-Fräse braucht man recht viel Kraft um den Fräser durch das Material schieben zu können. Für ein RepRap oder eine Pick and Place Maschine sind die Treiber okay, aber viel Kraft haben die nicht. Die internen MosFETs haben ja auch einen Innenwiderstand von 0.5 Ohm, Wenn du jetzt einen Stepper mit 3 Ohm Spulenwiderstand nutzt und du 2A als Haltestrom haben möchtest gehen 6 Watt am Schrittmotor verloren und 1 Watt am Treiber. Ist es möglich den Haltestrom vielleicht etwas abzusenken? Du könntest in die unteren Löcher Lötzinn fließen lassen, dann muss die Wärme nicht nur über das bisschen Kupfer an den Wänden der wenigen Durchkontaktierungen unter dem Chip entlang kriechen. Sei aber vorsichtig, der Chip wird dann natürlich auch locker.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.