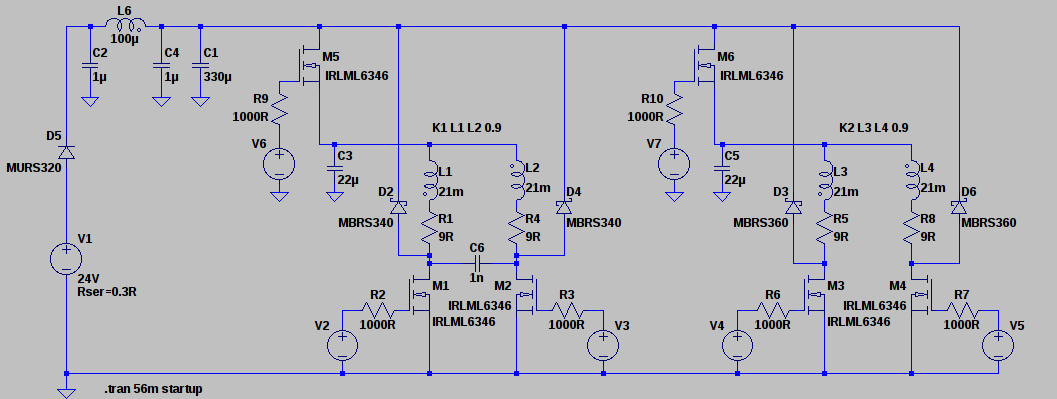
Guten Tag, wenn man meinen Suchmaschinen glaubt, werden Schrittmotoren nur für Fräsen und Roboter eingesetzt. Ich brauche aber keine 51200 Schritte pro Umdrehung und nur eine Drehzahl und leise muss es auch nicht sein -- es darf nur nichts warm werden. Na gut, ein wenig Drehmoment wäre schon o.k., aber da geht's schon los: entscheidend ist doch das Drehmoment bei Nenndrehzahl. Ein wenig Reserve zum Beschleunigen ist ja automatisch dabei, warum also sind bipolare Motoren angeblich günstiger als unipolare? Zwei diskrete H-Brücken sind mir zu aufwendig und ich finde kein Treiber-IC, das nicht zu warm wird. Dazu kommt, dass ich aus anderen Gründen sowieso einen uC mit reichlich Timer-Ausgängen habe. Also hab' ich LTSpice befragt und das meint, dass man die Treiber-Verluste auf unter 10% bringen kann. Wie realistisch ist das? Ist mein minimales Motormodell überhaupt brauchbar? Entscheidend sind C1, der den Strom aus den Freilaufdioden aufnimmt, und die beiden gesteuerten Spannungsquellen mit V6,M5 und V7,M6. Die werden zwischen z.B. 5V und 15V umgeschaltet um den Stromanstieg in den Motorspulen zu beschleunigen. Das müssen natürlich Schaltregler sein, aber ich hoffe, dass es für die Simulation auch so geht. Hier entstehen praktisch auch die einzigen nennenswerten Verluste. Außerdem sind dies die einzigen kleinen Bereiche mit höheren Frequenzen als die Schrittfrequenz. Die FETs M1 bis M4 sind nur für die Schrittphasen zuständig -- ohne PWM weniger Schaltverluste und saubere Motorströme, also weniger Motorverluste. Tja, kann das funktionieren? Lohnt es sich, eine Platine machen zu lassen?
Angehängte Dateien:
-

motor24.png
22 KB -

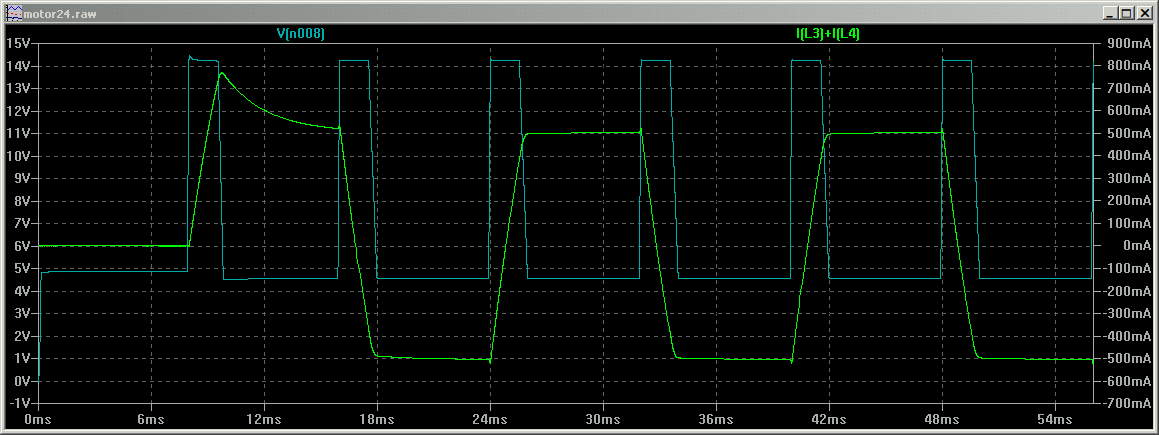
Motorstrom_und_Spannung.png
8,3 KB -

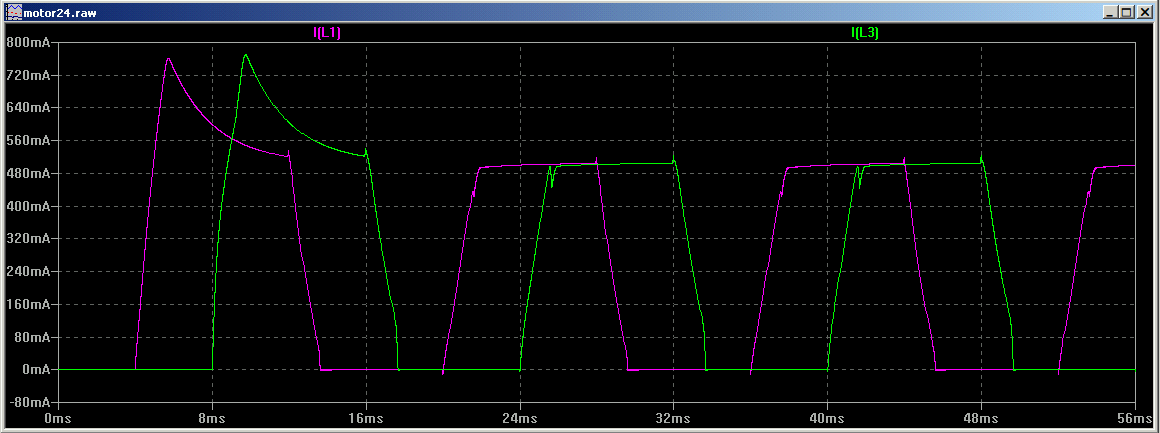
Wicklungsstrom.png
8,7 KB
Selbst wenn, was hat das mit Wärmerückgewinnung zu tun?
1k Gatewiderstand und wenig Verluste passen imho nicht so ganz zusammen. Außer Du hast hohe EMV-Anforderungen.
Zusammengefasst: WAS willst du ?... Dein Motormodell reicht nicht aus, da die Induktion, Koppelfaktoren etc. nicht berücksichtigt sind. Eine Treibereffizienz von 90% elektrisch ist ok wenn auch nicht weltbewegend..allerdings reicht dein minimalistisches Modell dazu nicht aus um irgendwelche Aussagen in der Richtung treffen zu können. Für die Anwendung "konstante Drehzahl" sind Schrittmotoren eine sehr schlechte Wahl - die meisten kommerziellen Produkte zielen auf eine Positionierung mit Mikroschrittbetrieb ab - daher die Kühlkörper (Bremsshopper). Besser geeignet wären hier einfache, stromgeregelte DC Motoren oder BLDC... aber ohne Infos über die Anwendung...
Treiberlehrling schrieb: > Tja, kann das funktionieren? Was hast du geraucht, um so einen Kauderwelsch zu schreiben ? 1. sind Schrittmotore denkbar ungünstig, wenn man wenig (Ab-)Wärme haben will, denn Schrittmotore müssen immer mit "ausreichend" Strom für's Drehmoment versorgt werden, um keine Schritte zu verlieren, und man weiss nicht wie hoch die aktuelle Belastung ist, muss also zuverlässig mehr reinstecken, während DC (Permanentmagnet) Motoren genau so viel Strom aufnehmen, wie sie für die Last und deren Drehmoment haben müssen. 2. Schaltet man NIE NIE Niemals die zweite Wicklung des unipolaren Motors mit einer (Freilauf-)Diode an die Versorgungsspannung, an der die Mittelanzapfung der Spule hängt, weil an der zweiten Wicklung wie beim Transformator die doppelte Speisespannung entsteht, wenn die erste Wicklung an Masse gelegt wird. Du schliesst die (über die 9R Widerstände die wohl der Wicklungswiderstand sind) effektiv kurz. Will man mit möglichst geringem Energieeinsatz also eine Sache mit konstanter Geschwindigkeit drehen, nimmt man einen DC Permanentmagnet Gleichstrommotor und regelt dessen Drehzahl, z.B. per Strichcodescheibe und PWM.
Oliver R. schrieb: > 1k Gatewiderstand und wenig Verluste passen imho nicht so ganz zusammen. > Außer Du hast hohe EMV-Anforderungen. Ein paar mW muss man den EMV-Göttern schon opfern ;) TestX schrieb: > WAS willst du ?... Ein Treiber-IC wie den Trinamic TMC2660 aber mit dickeren FETs drin. > Dein Motormodell reicht nicht aus, da die Induktion, Koppelfaktoren > etc. nicht berücksichtigt sind. Die Motorspulen sind doch per "K1 L1 L2 0.9" gekoppelt und die Wicklungssinn-Punkte sind doch richtig? Aber was z.B. wäre "etc."? > Für die Anwendung "konstante Drehzahl" sind Schrittmotoren eine > sehr schlechte Wahl MaWin schrieb: > 1. sind Schrittmotore denkbar ungünstig, wenn man wenig (Ab-)Wärme > haben will, denn Schrittmotore müssen immer mit "ausreichend" > Strom für's Drehmoment versorgt werden Ich weiß, aber die Mechanik ist fertig und bewährt. > 2. Schaltet man NIE NIE Niemals die zweite Wicklung des unipolaren > Motors mit einer (Freilauf-)Diode an die Versorgungsspannung, > an der die Mittelanzapfung der Spule hängt Deshalb tue ich das ja auch nicht. Die Dioden enden an den 24V und die Mittelanzapfung hängt auf 5 bis 15V. Eigentlich geht's bei der ganzen Schaltung nur um die Aufgabe "wohin mit den Dioden".
Treiberlehrling schrieb: > wenn man meinen Suchmaschinen glaubt, werden Schrittmotoren nur für > Fräsen und Roboter eingesetzt. Komische Suchmaschinen... Treiberlehrling schrieb: > es > darf nur nichts warm werden. Wie kalt darf es denn höchstens sein? Treiberlehrling schrieb: > Na gut, ein wenig Drehmoment wäre schon o.k., aber da geht's schon los: Genau, da wird das Schritt-Motörchen dann handwarm... Treiberlehrling schrieb: > Also hab' ich LTSpice befragt Ein neuer Kult ist geboren... Treiberlehrling schrieb: > Tja, kann das funktionieren? Lohnt es sich, eine Platine machen zu > lassen? Frag mal LTSpice!
Treiberlehrling schrieb: > Deshalb tue ich das ja auch nicht. Die Dioden enden an den 24V und die > Mittelanzapfung hängt auf 5 bis 15V. Wie jetzt, M5 und M6 sind nicht voll eingeschaltet, und du fragst nach Wärmeproblemen ? Du bist völlig auf dem Holzweg.
MaWin schrieb: > Wie jetzt, M5 und M6 sind nicht voll eingeschaltet, > und du fragst nach Wärmeproblemen ? Wer lesen kann... Treiberlehrling schrieb: > ... Spannungsquellen mit V6,M5 und V7,M6 ... > Das müssen natürlich Schaltregler sein, aber ich hoffe, > dass es für die Simulation auch so geht. Wenn ich da einen echten Schaltregler nehme, wird LTSpice elend langsam.
Treiberlehrling schrieb: >> Das müssen natürlich Schaltregler sein, Treiberlehrling schrieb: > Eigentlich geht's bei der ganzen > Schaltung nur um die Aufgabe "wohin mit den Dioden". Wenn du einen 12V Motor mit den Phasen an 12V schaltest, und die Freilaufdioden an 24V, dann wird keine Leistung durch Wicklungskurzschlüsse unnötig verbraten. Es wird aber auch kaum Leistung gewonnen, nur die Streuinduktivität, die nicht mal 1% der realen Induktivität ausmacht, eher 0.1%. Da ist insgesamt nichts zu gewinnen, was du nicht 100-fach durch uneffetive Spannungsrunterregelung verbrätst.
MaWin schrieb: > ... wird keine Leistung durch Wicklungskurzschlüsse unnötig verbraten genau darum geht's doch und dafür brauche die zweite Spannungsebene, oder? Die "normale" Lösung mit Zenerdiode oder Widerstand in Reihe mit der Freilaufdiode geht garnicht, da wird fast die gleiche Leistung verbraten wie im Motor. Soo schlecht sind die Schaltregler dann doch nicht. Ob PWM-Betrieb mit den 4 Phasen-FETs so viel besser wäre? Immerhin bekomme ich sehr saubere Motorströme und brauche nur simpelste Steuersignale. Außerdem: was wäre die Alternative? > Es wird aber auch kaum Leistung gewonnen, nur die Streuinduktivität Mit der aktuellen Schaltung bringe ich bei 250Hz Schrittfrequenz noch viel mehr Strom in den Motor als der thermisch verträgt. Also wären auch höhere Drehzahlen als im alten Aufbau (300Hz) möglich, das muss reichen.
TestX schrieb: > Besser geeignet wären hier einfache, stromgeregelte DC Motoren > oder BLDC MaWin schrieb: > 1. sind Schrittmotore denkbar ungünstig (...) während > DC (Permanentmagnet) Motoren genau so viel Strom aufnehmen, > wie sie für die Last und deren Drehmoment haben müssen. Also gut, ihr habt es so gewollt: Der TMC5130A treibt meinen unipolaren Motor im bipolar-Betrieb und emuliert einen Gleichstrommotor :D Witzigerweise ist das eins der preiswertesten Treiber-ICs. Vom gesparten Geld kann ich mir eine 4-lagige Platine und/oder einen Kühlkörper kaufen. Warum kann man keine vernünftigen Endstufen-FETs integrieren?!
Treiberlehrling schrieb: > Die "normale" Lösung mit Zenerdiode oder Widerstand in Reihe mit der > Freilaufdiode geht garnicht, da wird fast die gleiche Leistung verbraten > wie im Motor. Quatsch. Nur die Streuinduktivität wird verblasen, die ist eher klein. Treiberlehrling schrieb: > Der TMC5130A treibt meinen unipolaren Motor im bipolar-Betrieb und > emuliert einen Gleichstrommotor :D Nicht wirklich. Er kann zwar die Stromaufnahme refuzieren, wenn die Last kleiner ist, aber sie ist immer noch deutlich höher als bei einem Gleichstrommotor. Und nicht ohne Grund hat er Incrementaldecodereingänge. Und das Interface ist auch anders.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.