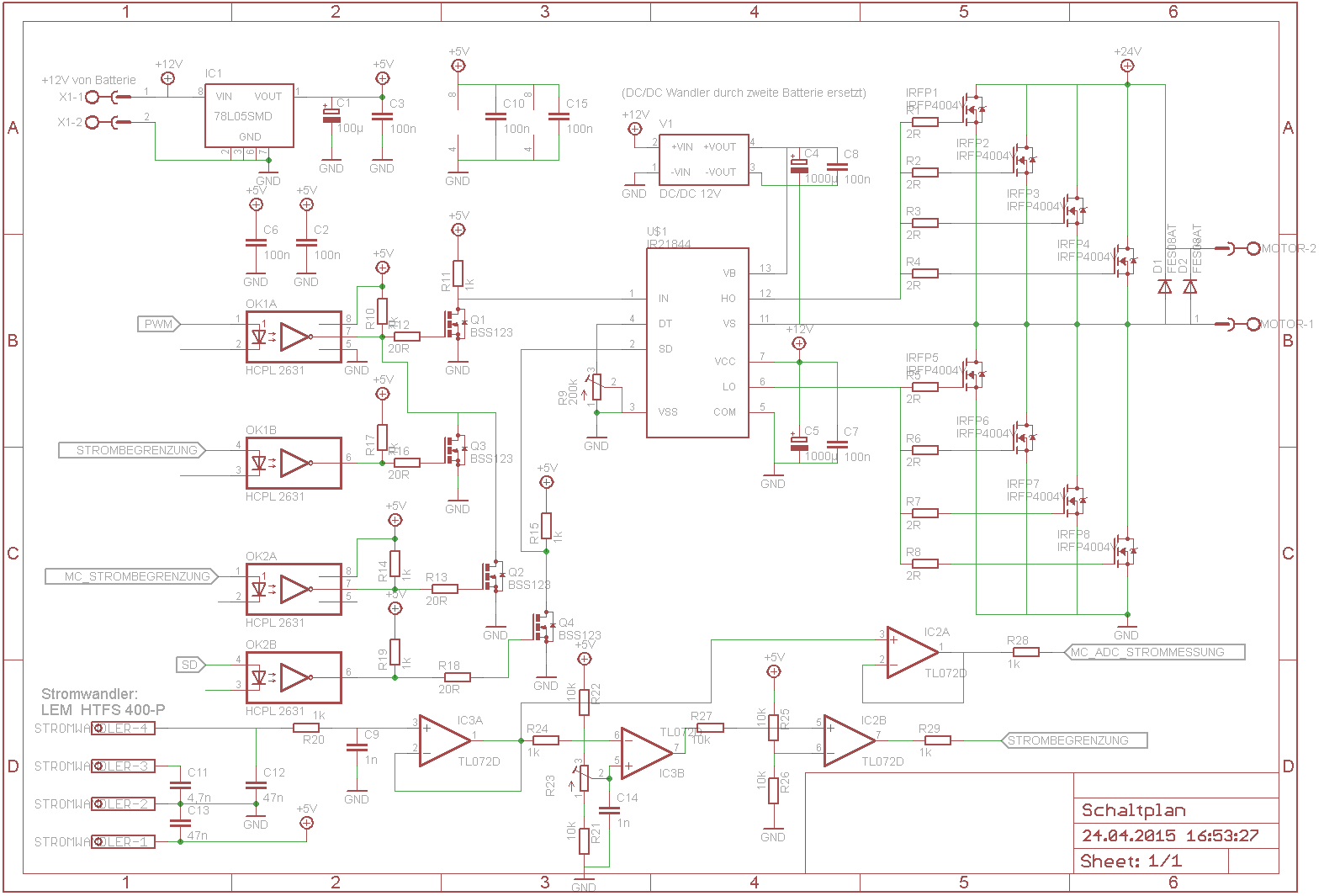
Hallo, ich möchte gerne einen 3kW 24V DC-Motor über PWM (Frequenz ca. 1kHz) ansteuern (E-Go-Kart). Als Versorgungsspannung werden wahrscheinlich erst mal zwei Autobatterien in Serie genutzt. Ich habe hier schon viele Beiträge gelesen, aber noch Fragen zu den Mosfets und den Treiber den ich verwenden will. Da der Motorstrom sehr hoch ist (Nennstrom 165A, beim Anlauf natürlich viel größer) möchte ich gerne mehrere (4 oder 5) Mosfets parallel schalten. Als Mosfets würde ich den IRFP4004 oder IRFP2907 einsetzen. Für den IRFP4004 spricht der geringere RSDon, aber leider hat dieser nur eine Spannungsfestigkeit von 40V, welches etwas eng werden könnte. Der IRFP2907 hält 75V aus, hat aber leider einen größeren RSDon. Ist eine Spannungsfestigkeit von 40V zu wenig bei einer Betriebsspannung bei vollem Akku von ca. 28V? Um den RSDon zu senken, könnte ich auch noch mehr IRFP2907 parallel einsetzen, welches zu meiner zweiten Frage/Problem führt: Als Treiber habe ich den IR21844 ausgewählt. Ich bin mir aber nicht sicher, ob dieser genug Strom für 4 oder mehr parallele Mosfets liefern kann. Hat jemand Erfahrung, wie viele Mosfets parallel betrieben werden können? Im Anhang ist ein erster Schaltplan (im Logik-teil könnten hierbei noch Fehler sein). Datenblatt des IRFP4004: http://www.irf.com/product-info/datasheets/data/irfp4004pbf.pdf Datenblatt des IRFP2907: http://www.irf.com/product-info/datasheets/data/irfp2907.pdf Datenblatt des IR21844: http://pdf.datasheetcatalog.com/datasheet/irf/ir2184.pdf
Angehängte Dateien:
-

schaltplan.png
27 KB
Stephan F. schrieb: > beim Anlauf natürlich viel größer Ja wie hoch denn ? Miss das doch mal aus, Betriebsspannung/Innenwiderstand. Stephan F. schrieb: > Als Treiber habe ich den IR21844 ausgewählt. Ich bin mir aber nicht > sicher, ob dieser genug Strom für 4 oder mehr parallele Mosfets liefern > kann. Alles eine Frage der angestrebten Umschaltzeit. Bei 1kHz nicht so wichtig. Stephan F. schrieb: > Im Anhang ist ein erster Schaltplan Wo kommt die negative Versorgungsspannung der steinalten TL072 her ? V1 braucht man nicht unbedingt, das kann der Treiber selber, so lange er kein dauerhaftes HIGH liefern muss. Die ganzen BSS123 können entfallen, wenn man geschickter ist, die HPCL2631 (unnötig schnell) haben open collector Ausgänge und lassen sich damit geschickt verodern. 1000uF sind bei einem so schnellen Treiber auch eher wirkungslos. Mit deinem Stromwandler kannst du zwar die mittlere Stromaufnahme der Motoren messen, aber keinen Kurzschluss schnell genug erkennen um vor Beschädigung der MOSFETs abzuschalten. Stephan F. schrieb: > Ist eine Spannungsfestigkeit von 40V zu wenig bei einer Betriebsspannung > bei vollem Akku von ca. 28V? Kommt auf dein Layout an. Jeder cm Leitung, durch den 165A fliessen, weigert sich beim Abschalten den Strom zu stoppen, es entstehen massive Spannungsspitzen BIS der Strom weiterfliessen kann. Schon der 1.4A Gate-Umladestrom führt zu ebensolchen Spannungsspitzen auf der Treiberseite. Das beherrscht man nur durch perfektes niederimpedantes Design.
Was für ein DC-Motor? BLDC? Reihenschlussmotor? Permanenterregte Gleichstrommaschine? Ich frage nur, weil der Anlaufstrom und sonstiges davon abhängig ist.
Vielen Dank für die Antworten! MaWin schrieb: > Ja wie hoch denn ? Miss das doch mal aus, > Betriebsspannung/Innenwiderstand. Es handelt sich um einen Reihenschluss DC-Motor. Der Innenwiderstand ist so gering, das ich diesen mit meinen Multimeter kaum messen kann. Es werden Werte zwischen 1mOhm und 10mOhm angezeigt. Dies beinhaltet aber natürlich auch noch die Messspitzen/Kontaktflächen. Der Innenwiderstand der Batterien+Anschlussleitungen werden somit schon fast in der gleichen Größenordnung liegen. MaWin schrieb: > Mit deinem Stromwandler kannst du zwar die mittlere Stromaufnahme der > Motoren messen, aber keinen Kurzschluss schnell genug erkennen um vor > Beschädigung der MOSFETs abzuschalten. Ist eine Messung über einen Shunt geeigneter? Thomas B. schrieb: > Was für ein DC-Motor? Es handelt sich um einen Reihenschlussmotor
Stephan F. schrieb: > MaWin schrieb: >> Ja wie hoch denn ? Miss das doch mal aus, >> Betriebsspannung/Innenwiderstand. > > Es handelt sich um einen Reihenschluss DC-Motor. > Der Innenwiderstand ist so gering, das ich diesen mit meinen Multimeter > kaum messen kann. Es werden Werte zwischen 1mOhm und 10mOhm angezeigt. > Dies beinhaltet aber natürlich auch noch die Messspitzen/Kontaktflächen. > Der Innenwiderstand der Batterien+Anschlussleitungen werden somit schon > fast in der gleichen Größenordnung liegen. Zum Thema Innenwiderstand würde ich das anders machen. Du müsstest einen konstanten Strom in den Motor speisen, zB 5A und und dann misst du den Spannungsabfall am Motor. Der Motor darf dabei aber nicht anlaufen.
Stephan F. schrieb: > Ist eine Messung über einen Shunt geeigneter? Zumindest nicht über 1k/1n gefiltert. Shunt würde ich bei den Strömen nicht nehmen. Aber eventuell ein Hallsensor, so genau muss es ja nicht sein.
Stephan F. schrieb: > Als Mosfets würde ich den IRFP4004 oder IRFP2907 einsetzen. 6-8 Stück IRFB3207/IRFS3207 sollten den Job gut können. Alles mit dicken Kupferschienen und auf einen anständigen Kühlkörper. Alternativ einen fertigen Curtis Controller oder einen Nachbau des Cougar Controllers.
:
Bearbeitet durch User
MaWin schrieb: > Mit deinem Stromwandler kannst du zwar die mittlere Stromaufnahme der > Motoren messen, aber keinen Kurzschluss schnell genug erkennen um vor > Beschädigung der MOSFETs abzuschalten. Der Stromwandler ist ja noch "schnell". Die nachgeschalteten drei OPs, der Koppler und die zwei Mosfets sorgen zusammen für geschätzte zweistellige Millisekunden an Verzögerung. Stephan F. schrieb: > Nennstrom 165A, beim Anlauf natürlich > viel größer Da haben selbst zwei neue Autobatterien dann schnell nur noch je 7 bis 10V oder so. Du verschenkst mit Bleiakkus auf jeden Fall so einiges an Wattstunden. Falls die Akkus so wie ja meist üblich sogar schon irgendwo rumflogen, dann kann auch je nur 2V draus werden. Also zumindest bei ersten Belastungstests mal im Auge behalten...
Thomas B. schrieb: > Zum Thema Innenwiderstand würde ich das anders machen. > Du müsstest einen konstanten Strom in den Motor speisen, zB 5A > und und dann misst du den Spannungsabfall am Motor. > Der Motor darf dabei aber nicht anlaufen. Das ist eine gute Idee!! Ich hatte den Motor auch schonmal am Labornetzteil mit 5A. Da läuft er auch noch nicht an. Werde ich morgen mal messen. Matthias Sch. schrieb: > 6-8 Stück IRFB3207/IRFS3207 sollten den Job gut können. Ok, danke für den Tipp! Diese sind auch etwas günstiger, da kann ich dann auch mehr von nehmen. Diese sollen dann auch auf Kupferschienen befestig werden. 0815 schrieb: > Der Stromwandler ist ja noch "schnell". Die nachgeschalteten drei OPs, > der Koppler und die zwei Mosfets sorgen zusammen für geschätzte > zweistellige Millisekunden an Verzögerung. Die ganze Strombegrenzungsschaltung und der Logik-Eingang sind nur "auf die schnelle zusammengebastelt" worden, sorry. Mir ging es im wesentlichen erst mal um die Mosfets und den Treiber. 0815 schrieb: > Da haben selbst zwei neue Autobatterien dann schnell nur noch je 7 bis > 10V oder so. Du verschenkst mit Bleiakkus auf jeden Fall so einiges an > Wattstunden. > Falls die Akkus so wie ja meist üblich sogar schon irgendwo rumflogen, > dann kann auch je nur 2V draus werden. > Also zumindest bei ersten Belastungstests mal im Auge behalten... Ja, das stimmt natürlich. Eventuell setzen wir später andere Akkus ein. Das "Projekt" ist aber auf ca. ein Jahr ausgelegt. Da testen wir jetzt erst mal mit "alten" Batterien.
Stephan F. schrieb: > Diese sollen dann auch auf Kupferschienen > befestig werden Löte sie besser gleich auf die Schiene. So hast Du besten thermischen und elektr. Kontakt. Stephan F. schrieb: >> Du müsstest einen konstanten Strom in den Motor speisen, zB 5A >> und und dann misst du den Spannungsabfall am Motor. >> Der Motor darf dabei aber nicht anlaufen. > > Das ist eine gute Idee!! Die Idee ist gut bei anderen, niederohmigen Bauteilen. Bei Bürstenmotoren wirst Du leider bei Rotorstellung X z.B. 100mOhm haben, bei Rotorstellung Y 300mOhm, an Position Z 200mOhm. Im DB steht für diesen Motor dann z.B. 80mOhm. Mit nem Multimeter im Widerstandsbereich schwankt die Messung glatt von unendlich bis kurz über dem Nenn-Anschlusswiderstand. Und die Rede ist dabei auch von nagelneuen, hochwertigen Motoren. Probiere ruhig mal, klappt nicht wirklich genau. Scheint gar nicht mal abhängig von der Lage der Kollektorsegmente zwischen den Kohlen zu sein, sondern einfach von Kontakt"problemen".
Angehängte Dateien:
-

1.jpg
9,7 KB
Stephan F. schrieb: > Im Anhang ist ein erster Schaltplan (im Logik-teil könnten hierbei noch > Fehler sein). In deinem Schaltplan sehen ich an den meisten Verbindungen keine Punkte, nur Kreuzungen. Da ist noch einiges zu korrigieren.
Stephan F. schrieb: > Es handelt sich um einen Reihenschlussmotor Denke bei solch einem Motor auch evtl. über eine getrennte Ansteuerung der Feldwicklung nach. Um bei hohen Drehzahlen das Bürstenfeuer zu verringern, wird dazu das Feld abgeschwächt. Wenn dein Motor die Wicklung schon getrennt nach aussen führt, umso besser. Das ist bei einem kleinen 3kW noch nicht zwingend, wird aber bei etwas grösseren Motoren für eine lange Lebensdauer gerne gemacht.
:
Bearbeitet durch User
Matthias Sch. schrieb: > Denke bei solch einem Motor auch evtl. über eine getrennte Ansteuerung > der Feldwicklung nach. Um bei hohen Drehzahlen das Bürstenfeuer zu > verringern, wird dazu das Feld abgeschwächt. Wenn dein Motor die > Wicklung schon getrennt nach aussen führt, umso besser. Das ist bei > einem kleinen 3kW noch nicht zwingend, wird aber bei etwas grösseren > Motoren für eine lange Lebensdauer gerne gemacht. Guten Morgen! danke für den Hinweis!! Ja, der Motor hat beide Wicklungen getrennt nach außen geführt. Ich kenne mich mit der Feldsteuerung im Moment noch nicht aus, werde mich aber in der kommenden Woche mal dort einlesen. Thomas B. schrieb: > Zum Thema Innenwiderstand würde ich das anders machen. > Du müsstest einen konstanten Strom in den Motor speisen, zB 5A > und und dann misst du den Spannungsabfall am Motor. > Der Motor darf dabei aber nicht anlaufen. Kleines Update zum Innenwiderstand: Da der Motor beide Wicklungen nach außen geführt hat, konnte ich diese getrennt messen. Die Statorwicklung hat einen Widerstand von ca. 11,55 mOhm. Bei der Rotorwicklung ist der Widerstand (wie oben schon bemerkt wurde) Kontaktabhängig. Der kleinste Widerstand den ich messen konnte lag bei ca. 150 mOhm. Dieser kommt mir aber etwas groß vor. Ich werde mich jetzt mal etwas mit der Feldsteuerung befassen und einen neuen Schaltplan zeichnen. Ich denke dies wird bis nächstes Wochenende dauern. Werde mich dann wieder melden. Vielen Danke für gute und hilfsbereite Unterstützung! Einen schönen Sonntag noch!!
Stephan F. schrieb: > Der kleinste Widerstand den ich messen konnte lag bei > ca. 150 mOhm. Dieser kommt mir aber etwas groß vor. Der wird normalerweise bei Drehung noch kleiner. Ich vermute, es liegt daran, daß Kohlenstoff als Kontakt eingesetzt wird, bei Edelmetallbürsten sollte das evtl. besser messbar sein. 5A Messstrom sind bei dem Motor natürlich auch recht wenig, bei 100A und blockiertem Motor kann das evtl. schon aussagekräftiger werden. Unter vielleicht 25mR wirst Du aber auch real kaum messen/errechnen. Irgendwoher müssen ja die paar hundert Watt Verluste kommen ;-)
>Als Mosfets würde ich den IRFP4004 oder IRFP2907 einsetzen. >Für den IRFP4004 spricht der geringere RSDon, aber leider hat dieser nur >eine Spannungsfestigkeit von 40V, welches etwas eng werden könnte. Das ist genug, bei max. 26 V Zwischenkreisspannung, wenn dein Zwischenkreis richtig(!) angebunden ist. Eine hohe Spannungsreserve ist erforderlich, wenn man schnelle Anstiegszeiten braucht, die über den (nicht vollständig vermeidbaren)parasitären Zuleitungsinduktivitäten Spannungsüberschwinger am Halbleiter anregen. Wenn die PWM-Frequenz nur 1 kHz beträgt würde ich die Gatewiderstände so auslegen, dass sich eine Anstiegszeit von ca. 500ns einstellt. Mehr als zwei FETs halte ich für übertrieben. Ein IRFP4004 im TO247-Gehäuse sollte bei 90 A mitspielen, solange er an einen geeigneten Kühlkörper angebunden ist. LEler
Ich wuerd bei 24V keinen Kollektor Motor verwenden, denn ueber dem Kollektor verliert man sicher 2-3V, ohne etwas damit zu bewirken. Dh 3V mal 150A waeren dann schon 450W. Nimm einem BLDC. Der verschleudert keine Kollektorspannung.
Angehängte Dateien:
-

schaltplan.png
44 KB
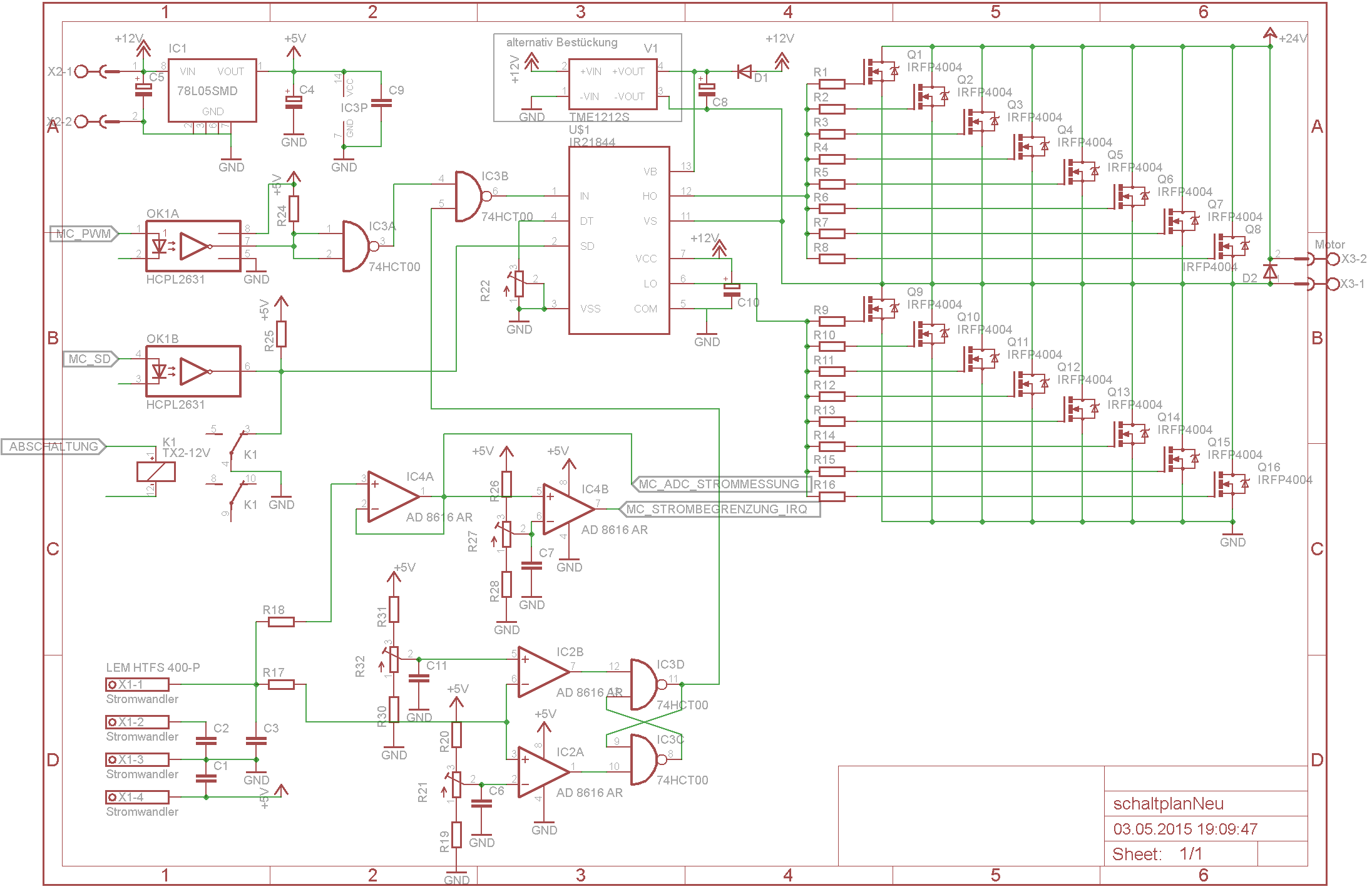
Hallo, so ich habe eine neue Version vom Schaltplan erstellt. Ich habe die Strombegrenzung (hoffentlich) schneller gemacht und mit eine Hysterese ausgestettet. Ist die Strombegrenzung so schnell genug? Die Hysterese habe ich eingeführt, weil ich den Motorstrom messen will, also auch den Strom im Freilaufpfad. Oder macht es mehr Sinn, den Strom in den Zuleitungen zu messen? Die Strombegrenzungsschaltung die zum Mikrocontroller geht, soll schon bei ca. Nennstrom auslösen, da diese langsammer ist. Dadurch soll der Mikrocontroller den Strom regeln können. Also z.B. nur beim Anfahren kurzzeitig mehr Strom zulassen. Beim Anfahren/Blockieren muss dann die "direkte" Strombegrenzung greifen. Als Mosfets werde ich erst mal 4 IRFP4004 testen, da mir das größere Gehäuse besser passt. Im Schaltplan sind 8 dieser Fets eingezeichnet, damit später eventuell auf andere Fets umgestiegen werden kann. Der DC/DC-Wandler ist eine optionale-Bestückung, falls ich den Motor mal permanent Kurzschließen will.
Das geht so aber nicht. Der Treiber IRS 21844 hat einen Ausgangsstrom von 1.4A max. Und damit willst du 8 FET parallel treiben ?
Siebzehn Für Fuenfzehn schrieb: > Das geht so aber nicht. Der Treiber IRS 21844 hat einen Ausgangsstrom > von 1.4A max. Und damit willst du 8 FET parallel treiben ? Nein, eigentlich will ich maximal jeweils 4 FETs verwenden. Die 8 FETs sind nur eingezeichnet, da ich auf der Platine Platz für 8 FETs nebeneinander habe. Und gegebenenfalls später auf andere FETs umsteige, die vielleicht eine geringere Gatekapazität haben. Ich will auf dem Layout nur die möglichkeit erhalten. (Die FETs kommen natürlich nicht direkt auf die Platine. Die werden auf Kupferschienen geschraubt, nur die Gate-Anschlüsse werden mit der Platine verbunden.) Die 1,4A sind ja auch der minimale Strom nach Datenblatt (oder hab ich mich da verlesen?). Die Typ. Werte liegen ja etwas höher. Die Schaltzeiten der FETs sollten so um die 500ns bis 600ns liegen. Wenn ich nicht eine sehr unglückliche Bauteilkombination erwische, sollte das einzuhalten sein, oder nicht?
Mir ist im Moment nicht klar, warum du eine Halbbrücke einbaust. Willst du den Motor kurzschliessen? Das solltest du im Moment noch sein lassen, dabei entstehen ungeahnte Ströme und der Motor leidet kräftig. Bei deinem Motor reicht im Moment eine kräftige MOSFet Stufe in der Lowside. Und viele schöne Freilaufdioden in der Highside. Im Curtis1221 sind dazu MR2406 verbaut, etwa 8 Stück.
Matthias Sch. schrieb: > Mir ist im Moment nicht klar, warum du eine Halbbrücke einbaust. Willst > du den Motor kurzschliessen? Das solltest du im Moment noch sein lassen, > dabei entstehen ungeahnte Ströme und der Motor leidet kräftig. > Bei deinem Motor reicht im Moment eine kräftige MOSFet Stufe in der > Lowside. Ich wollte eigentlich die Verluste in den Freilaufdioden verringern. Aber eine reine Lowside-Stufe würde das ganze natürlich wesentlich vereinfachen. Dann könnte ich auch einen Treiber mit mehr Strom nehmen. Ich werde mir das mal überlegen.
Matthias Sch. schrieb: > Mir ist im Moment nicht klar, warum du eine Halbbrücke einbaust. Willst > du den Motor kurzschliessen? Das solltest du im Moment noch sein lassen, > dabei entstehen ungeahnte Ströme und der Motor leidet kräftig. Mir ist nicht klar, wo der ungeahnte Strom herkommen soll? Er wird genauso groß sein, wie er war, solange der andere Teil der Halbbrücke aktiv war. So will es die Induktivität. Mit diesem Strom muß auch die Freilaufdiode klar kommen. Und warum sollte der Motor leiden? Die aktive Freilaufdiode wird zwar aber (hoffentlich) einen kleineren Spannungsabfall haben, als eine passive (dafür macht man das ja), das wird den Motor aber nicht extra belasten. MfG Klaus
Klaus schrieb: > Und warum sollte der Motor leiden? Weil auch der Kurzschlussstrom über die Bürsten läuft. Jedenfalls hat keiner der verbreiteten Motorcontroller a la Curtis eine Highside oder schliesst gar den Motor kurz. Wenn du das tust, wird nahezu die gesamte Energie des Freilaufs in den Kurzschluss gepumpt und der Motor wird sehr stark abgebremst - ein normalerweise unerwünschtes Verhalten. Das ist nicht der Strom der im Betrieb floss, sondern die Drehenergie des Motors - plus der trägen Masse des angetriebenen Gefährts.
Matthias Sch. schrieb: > Jedenfalls hat > keiner der verbreiteten Motorcontroller a la Curtis eine Highside oder > schliesst gar den Motor kurz. Na, ne Freilaufdiode werden sie wohl drinn haben. Je besser sie ist, um so mehr wirkt sie wie ein Kurzschluß. MfG Klaus
Matthias Sch. schrieb: > Wenn du das tust, wird nahezu die gesamte Energie des Freilaufs in den > Kurzschluss gepumpt und der Motor wird sehr stark abgebremst - ein > normalerweise unerwünschtes Verhalten. Das ist nicht der Strom der im > Betrieb floss, sondern die Drehenergie des Motors - plus der trägen > Masse des angetriebenen Gefährts. Da muss man jetzt aber differenzieren. Im PWM-Betrieb wird der Strom nie 0, d.h. der Strom fließt so oder so. Ob über Dioden oder geschaltete Mosfets auf der Highside. Nur die Verluste sind bei Mosfets geringer. Wenn der Strom dagegen auf 0 fällt wird das Verhalten dagegen unterschiedlich. Bei Freilaufdioden bleibt der Strom 0 und der Motor läuft aus. Wenn dagegen durchgeschaltete Mosfets den Motor kurzschließen, dann kommt es zu den genannten hohen Strömen und einem starken Abbremsen. Aktiv abgebbremst wird ein DC-Motor daher ggf. ebenfalls mit PWM (Bremschopper).
Stephan H. schrieb: > Wenn dagegen durchgeschaltete Mosfets den Motor kurzschließen, dann > kommt es zu den genannten hohen Strömen und einem starken Abbremsen. Wobei der Strom auch nicht höher als der Blockierstrom ist, der Ohmsche Widerstand im Strompfad sorgt schon dafür. MfG Klaus
Klaus schrieb: > Wobei der Strom auch nicht höher als der Blockierstrom ist, der Ohmsche > Widerstand im Strompfad sorgt schon dafür. Schon klar. Nur greift dann die Strombegrenzung nicht, weil falsches Vorzeichen. Schadet sicher nicht das mit zu bedenken. Solange der Motor-Strom nicht auf (unter) Null sinkt reduzieren die Highside-Fets jedenfalls die Verluste. Das ganze mag nicht in jeder Anwendung relevant sein, hier ist es das aber denke ich: 1. Bei Top-Speed (100% PWM, Gerade) um 80% der Leerlaufdrehzahl sind beim Wechsel auf 0% PWM durchaus 1500A drin. Viel für die 4 Fets. 2. Auch wenn man den Treiber bei 0% abschaltet ist das Gaspedal träge und vor 0% kommen 15%, 10%, 5% ebenfalls mit ordentlich Bremsstrom. 3. Wenn man die Fets bei 0% abschaltet ist das Verhalten beim Wechsel 100%>0% (=Leerlauf) ganz anders als beim Wechsel 100%>10% (=aktives Bremsen) 4. Die Gasstellung bei der grade nicht aktiv gebremst wird ist schwer zu finden und nachzuführen. Ein Auslaufen mit minimalem Energieverbrauch fast unmöglich. (minimaler Energieverbrauch = mehr Akkuspannung = mehr Speed) 5. Auch Cart-Fahrer haben vmtl. gerne Gas+Bremse getrennt. Und jede Gas-Wegnahme über so 30% würde aktives Bremsen (mit Verlusten) bedeuten. Lösen kann man das auf vielfältige Weise. Auf jeden Fall würde ich einen Drehzahlsensor einbauen und evtl. auch "negative" (=Brems-) Motorströme berücksichtigen. Den hohen Bremsstrom kann man z.B. durch angepasste Rampen bei starker Gaswegnahme (Trägheit ist ja grob bekannt) erreichen. Oder die Highside-Fets bei Gaswegnahme über 30% deaktivieren (z.B. für 50ms je Prozentpunkt über 30), die PWM läuft dann bei den IR21844 über den Enable-Eingang und nicht mehr über den PWM-Eingang. Oder auch bei Strömen unter z.B. 15A die Highside-Fets deaktivieren (Wechsel auf Ansteuerung über Enable). Für ein "Wir fahren übers Land"-Cart langt das dann sicher schon, richtig gut wird das ganze aber erst wenn man dem E-Antrieb (beim Verzögern) ein nachvollziehbares und glattes Verhalten verpasst. Mit reinen Freilaufdioden auf der Highside ist das von Haus aus schon ganz gut der Fall. Hat aber bei z.B. 50% PWM und 100A Motorstrom ca. 50W Verluste bei rund 1200W Eingangsleistung. Mit den Highside-Fets sinds dagegen nur ca. 10W. Das gilt es nachzubauen: Niemals Wechsel in den Bremsmodus ohne Bremspedal, softes Drehmoment beim Annähern an die Zieldrehzahl (lückender Strom) und dabei die Freilaufdioden so wenig wie nötig verwenden. Annäherung an 0% und 10% Gas gleichartig. Glatt und gewohnt halt. Evtl. auch noch Nutzbremsung.
Ein paar Anmerkungenzum Schaltplan: D1 ist falsch rum, zu C10 muss ein Keramik-Kondi parallel, über IC1 gehört wenn es ganz sicher sein soll eine (antiparallele) Diode. Die Schaltung die das Signal "MC-Strombegrenzung_IRQ" erzeugt würde ich so nicht machen. Wenn Sich der Strom nahe der Schaltschwelle befindet und ein wenig rauscht kann das Signal schwingen und den Controller dauernd in die IRQ-Routine schicken. Nimm das Signal besser von dem Flipflop ab, dass du unten gebaut hast. Den Rücksetzeingang des FF sollte der Controller steuern, keine Komparatorschaltung. Es wäre gut, wenn dein Controller das Signal vom LEM mit einliest. Ich teile die Meinung, dass ein Treiber für bis zu acht (m.e. weder finanziell noch technisch sinnvoll) FETs keine gute Idee ist. Was Mathias schreibt ist vom Gedanken her richtig; bei einer langsamen PWM kann bei einem Motor mit geringer Induktivität dieser evtl. kurzzeitig als Generator geschaltet werden. Ob dem so ist/signifikant ist, solltest du mit Hilfe der Motordaten kurz ausrechnen und selbst beurteilen. Falls du einen aktiven Freilauf haben willst, rate ich zu einem Treiber wo du High- und Lowside unabhägig (ggf. mit ST-Schutz) steuern kannst. Für die ersten Versuche rate ich, die Highside-FETs gegen Dioden (mit niedrigem Qrr) zu tauschen. Just my 2 cent... LEler
Danke für die ausführlichen Antworten! Stephan H. schrieb: > Das gilt es nachzubauen: Niemals Wechsel in den Bremsmodus ohne > Bremspedal, softes Drehmoment beim Annähern an die Zieldrehzahl > (lückender Strom) und dabei die Freilaufdioden so wenig wie nötig > verwenden. Annäherung an 0% und 10% Gas gleichartig. Glatt und gewohnt > halt. Evtl. auch noch Nutzbremsung. Ganau so war das ganze eigentlich gedacht. Der Motor sollte erstmal auch nicht als Bremse eingesetzt werden. Zum Bremsen gibt es noch eine starke Scheibenbremse. Die Bremsung über den Motor war nur eventuell mal für später angedacht. Ich denke, es ist aber eigentlich nicht wirklich nötig. Die Halbbrücke war im wesentlichen zur reduktion der Verluste gedacht. Ich bin jetzt am überlegen, ob ich wirklich die high-Side benötige, oder die größeren Verluste in Kauf nehme und nur Low-Side schalte und mit Freilaufdioden arbeite.
Stephan F. schrieb: > Ich bin jetzt am überlegen, ob ich wirklich die high-Side benötige, oder > die größeren Verluste in Kauf nehme und nur Low-Side schalte und mit > Freilaufdioden arbeite. Ich könnte mir vorstellen, daß passende Dioden teurer sind als FETs. Und selbst wenn sie garnicht angesteuert werden, vertragen die Body-Dioden den gleichen Strom wie die FETs. Ich würde aber den Motor auf der freien Seite an GND legen und die PWM, mit passendem Treiber auf der High-Side machen. Dann kannst du auf der Low-Side Bremsen ohne den DC-DC Wandler, möglicherweise zusätzlich auch über einen kleineren Logic-Level FET (ohne Treiber) mit passendem Widerstand als "schwache" Bremse. MfG Klaus
Ich glaube das Ergebnis Deiner/Eurer Bemühungen ist von allgemeinerem Interesse. Darf man sehen, was daraus geworden ist? Wäre echt super!
Ohweh wenn ich den Thread nur wieder anschaue....die gezeigte Schaltung hat wie immer den gravierenden Fehler dass kein Zwischenkreiskondensator eingeplant ist. Wieso zum Teufel lassen den die Leute immer weg?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.