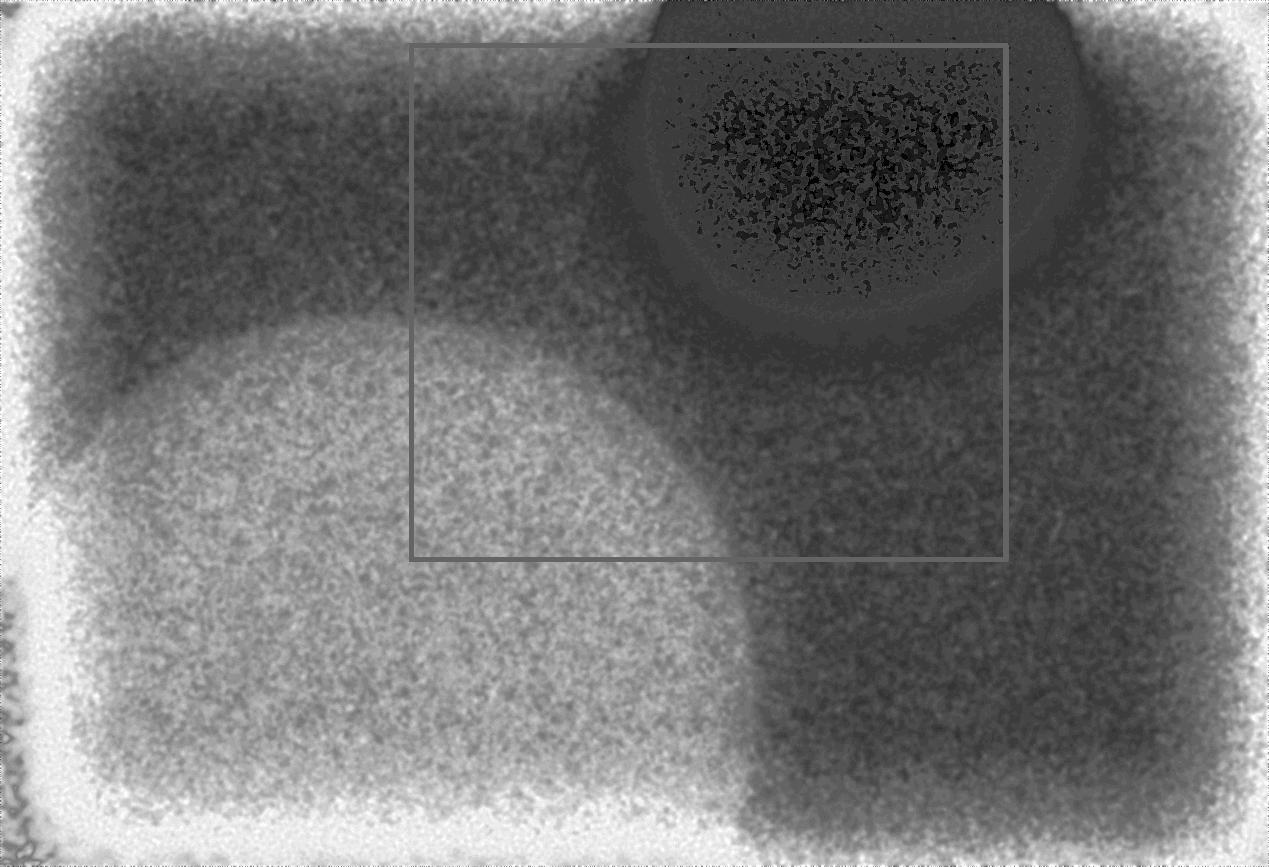
Aus einer Bildverarbeitung kommen 2D-XY-Daten in einen Bildspeicher, der von einem Videoprozessor ausgelesen wird. Im Bild (hell-dunkel), das stark verrauscht ist, sollen Kreise identifiziert werden. Der Mittelpunkt kann dabei ausserhalb des Bildes liegen. Es gibt einen dark spot und einen light spot, deren Grösse und Lage bestimmt werden sollen. Infolge diverser Effekte sind die Kreise leicht deformiert. (Real sind es Kugelprojekttionen, die schwimmen und verwackeln). Angedeutet ist der Bilduschnitt im Videospeicher. Das Bild kann mehrfach ausgelesen, zwischengespeichert und analysiert werden. Was ich schon hinbekommen habe, ist das Bild so zubearbeiten, dass ich das Rauschen weg habe und Kreise ausweisen kann. Wie gelange ich nun zu den Parametern R und Xm,Ym?
Angehängte Dateien:
-

powersolutioncloud.jpg
130 KB
Die Hough-Trans habe ich schon probiert. Das ist aufwändig und nicht so ergenisbringend. Weitere Ideen?
1) Filtern 2) Kantendetektion 3) Morphologische Filter (optional) 4) Klassifizierungs-Algo (bspw. k-Means) Georg B. schrieb: > Die Hough-Trans habe ich schon probiert. Das ist aufwändig und nicht so > ergenisbringend. Wir bewegen uns hier im Bereich des Maschinellen Sehens -- hier ist nichts einfach und mal eben schnell ohne großen Aufwand gemacht.
Langsam verstehe ich, wieso hier der Ton häufig rauer als erwartet ist. Wenn du ein Problem schilderst mit der Frage "Wie gelange ich nun zu den Parametern R und Xm,Ym?" ohne deine bereits versuchten Verfahren zu schildern, bekommst du garantiert die am meisten Erfolg versprechenden Methoden, i.e. Kantenfilter + Hough. Besser, du legst die Karten auf den Tisch und erzählst uns ein bisschen mehr. 1) Sieht aus wie Fluoreszenzmikroskopie. Stimmt das? Wenn nicht, was ist es? 2) Du sagst, die Objekte sind nicht statisch. Also her mit den Daten! Mindestens eine Bildfolge von mehreren zeitlich kohärenten Aufnahmen einer typischen Situation. 3) Was hast du bereits versucht, mit welchen Parametern? 4) Bist du bereit, Code zu veröffentlichen oder willst du nur eine Diskussion, bei der wir dir alles aus der Nase ziehen müssen? 5) Du sagst, du hast das Rauschen beseitigt. Warum zeigst du uns dann ein verrauschtes Bild? 6) Du kannst Kreise ausweisen. Bitte erläutern. Meinst du, du guckst das Bild an und sagst "KREIS!" oder hast du was handfestes? Okay, hab mich beruhigt. Was brauchst du? Radius und Kreismittelpunkt. Wie bekommst du das? Indem du einen Kreis an die Objekte fittest. Durch was ist ein Kreis definiert? Durch die Punkte, die die Kreisformel erfüllen. Diese Punkte liegen auf der Kontur der Objekte deines Bildes. Du musst also die Konturpunkte finden. Ansatz 1: Segmentierung der gesamten Objekte und Kontursuche. A) Dynamische Schwellwerte B) Texturanalyse (Stichwort Morphologie, FFT, Kookkurenzmatrix, Laws Texture Energy Measures) C) Maschinelles Lernen: SVM, Neuronale Netze Ansatz 2: Direkte Klassifizierung der Konturpunkte. A) Kantendetektion (Hochpass, Canny, Morphologische Filter) B) Maschinelles Lernen C) Feature-Extraktion mit nachfolgender Filterung nach Kriterien Ansatz 3: Statistische Kurvenbestimmung Hough ist nicht nur für Kreise da! Lies dich ein. Ansatz 4: Zeitliche Kohärenz ausnutzen WENN du zeitlich kohärente Bilder hast, dann nutz das aus! Bilde den optical flow zwischen aufeinanderfolgenden Bildern. Entsprechende Vektoren in aufeinanderfolgenden Bildern deuten auf Objekte hin, zufällige Vektoren auf Hintergrund, FALLS dein Hintergrund einem statistischem Prozess folgt. Stichworte: Features, Dense Optical Flow So, jetzt bist du dran!
Angehängte Dateien:

zwonk schrieb: > 1) Sieht aus wie Fluoreszenzmikroskopie. Stimmt das? Wenn nicht, was ist > es? Es ist ein Forschungsprojekt aus dem Bereich der elektromagnetischen 3D-Lokalisation von metallischen Objekten. Sie entstehen nach einer Flächenabtastung eines elektrosensitiven Sensors. > 2) Du sagst, die Objekte sind nicht statisch. Also her mit den Daten! Habe ich noch keine. > 3) Was hast du bereits versucht, mit welchen Parametern? Ich habe die Bilder ofline mit MATLAB prozessiert und mir überlegt, wie es möglich sein könnte, das Rauschen wegzubekommen. Angelangt bin ich bei einem glatten Bild > 4) Bist du bereit, Code zu veröffentlichen Habe noch keinen. Es geht jetzt darum, festzustellen, was man braucht und welche Plattform sowas leisten kann. > 5) Du sagst, du hast das Rauschen beseitigt. Warum zeigst du uns dann > ein verrauschtes Bild? Siehe oben das entrauschte Bild > 6) Du kannst Kreise ausweisen. Bitte erläutern. Meinst du, du guckst das > Bild an und sagst "KREIS!" oder hast du was handfestes? Es müssen Kreise sein, weil die Emmission kubisch ist und die Projektion auf einer Fläche immer ein Kreis ist. > Okay, hab mich beruhigt. Was hat Dich denn so erregt?
Es gibt doch in OpenCV eine eingebaute Kreiserkennung? Meine ich neulich in einem Tutorialgelesen zu haben...
Okay, kapiert. Ich halte mich raus. Aus deinen Antworten sehe ich genau das, was ich schon hundertmal in real life und hier im Board gesehen habe. Wenig Input, schwammige Formulierung, ausweichende Antworten, aber Erwartungshaltung. Viel Spaß mit dem Projekt!
Stefan schrieb: > Es gibt doch in OpenCV eine eingebaute Kreiserkennung? Meine ich neulich > in einem Tutorialgelesen zu haben... Das ist ein guter Hinweis. Vielen Dank. Das werde ich mir raussuchen. Danke denen, die konstruktives beigetragen haben. Den anderen wünsche ich noch ein schönes Wochenende.
> Besser, du legst die Karten auf den Tisch und erzählst uns ein > bisschen mehr. Die Frage war klar und verständlich formuliert. Es ging um Bildverarbeitung. Die Schuhgröße des Großvaters väterlicherseits, ob das Bild durch Kirlianfotografie oder ektoplasmische Niederschläge entstanden ist und ob der Code letztlich Open Source wird, tut da nichts zur Sache. Ich verstehe auch, warum der Ton oft so indiskutabel wird: Das passiert dann, wenn Leute, die offenbar keine Antwort beisteuern können, ihre niedrigen Instinkte durch Herumnörgeln an der Fragestelltung ausleben.
Das kann man klar und eindeutig beantworten. Entweder man ist ein Enthusiast der ein Thema oder Problem diskutieren will. Dann erklärt man das Problem und seine Umgebung klar und offen. 1. Wer das verneint, hat noch nie komplexe Probleme bearbeitet, bei denen oft gar nicht klar ist ob gewisse Tatsachen nun zur befriedigenden Lösung beitragen oder nicht. 2. Wer das verneint, will auch nicht, dass die Gemeinschaft von der Diskussion profitiert und das kann sie überhaupt erst und um so besser, wenn viel von dem Gesamtzusammenhang offengelegt wird. Oder man ist, wie sich aus dem oben Gesagten ergibt, ein "Kunde", der die Information, die er preisgibt minimieren und die, die er erhält maximieren will. Dann soll er hier Projektanfragen stellen oder Stellenanzeigen aufgeben.
Wie klein wird der kleinste Kreis? Das Bild kann man doch ohne weiteres auf 10% also 1% der Pixel runtersamplen ohne relevante Information zu verlieren. Vielleicht kann man dann noch die ganzen Kreise erfassen ohne sie abzuschneiden und ohne diesen hässlichen Rand? Dann wäre es einfach eine Diskriminierung nach Amplitude über Schwellenwerte und danach ein center of gravity für den Mittelpunkt und eine Flächenberechnung für den Radius.
Diese Kreiserkennung interessiert mich dienstlich auch, aber ich werde hier nicht nach Lösungen fragen. Der Zahn wurde mir wieder mal gezogenen. Wenn ich mir dieses Segment ansehe, wird mir immer wieder klar, das der Mensch den Kreis gut erkennen kann, die fehlenden Ränder simple mathematische Verfahren jedoch ausschließen. Andererseits braucht man nur 3 Punkte auf der Peripherie um einen Idealen Kreis erkennen. Leider ist kein Kreis ideal.
Was wäre der Vorteil des runterskalierens? Ich verliere Information. Wo ist der Wert? Der Bildschauschnitt ist nicht willkürlich. Der Aufnahmebereich ist begrenzt, wie bei einer Fotokamera. Ich kann diesen maximieren und dabei Bildrate verlieren, aber nicht über alle Grenzen gehen. Es wird immer so sein, dass Projektionen unvollständig bleiben. Ich möchte dann natürlich den Ausschnittsbreich anpassen, sobald ich die Kreisgrössen habe. Es reicht aber, die Kreise zu fitten und die XY-Koordinaten zu haben. Die XZ und YZ-Raumpositionen bestimmen orthogonale Messsysteme. Damit kann dann letztlich der 3D-Mittelpunkt ermittelt werden. Hoffentlich :-)
Da fällt mir gerade ein was der schlüssel zur lösung ist: Transformation nach log-polar: googeln z.B. nach log polar circle
Wenn du das Bild auf 10% verkleinerst, dann erkennt man noch immer sehr genau die Kreise, auch innerhalb des Quadrats. D.h., für eine Erkennung dürfte es noch ausreichend sein. Und Hough-Transformation ist nicht gleich Hough-Transformation. Du kannst die Transformation so formulieren, dass du einen Punkt nicht auf Rand-, sondern auf Flächen-Zugehörigkeit testest. Dabei kannst du das Transformationsraster nochmal gröber machen. Dazu noch eine Transformation für verschiedene Kreisdurchmesser oder gleich eine mehrdim. Hough-Transformation. Dann die Transformierte ausreichend glätten und nach Max/Min suchen... Selbst wenn du nur einen Teilkreis, Rest abgeschnitten, hast, liefert dir die Transformation noch immer Treffer. Ich habe selbst schon bei verschiedenen Formen gemacht, meist immer erfolgreich. Der Algorithmus lässt sich übrigends gut auf einer GPU ausführen.
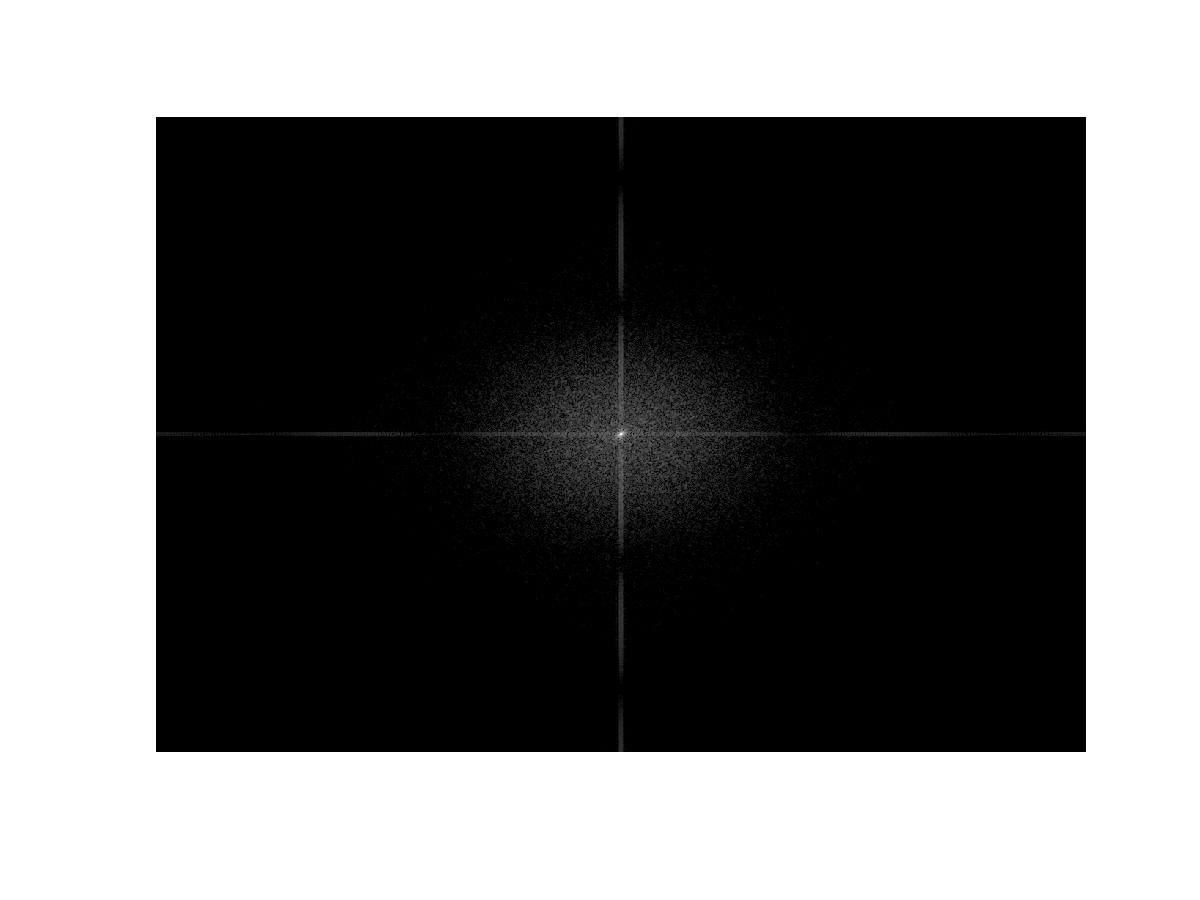
Georg B. schrieb: > Was wäre der Vorteil des runterskalierens? Ich verliere > Information. Wo > ist der Wert? So wie das Bild aussieht denke ich nicht dass Information verloren geht bei runtersamplen auf 10%. Denn schaut man sich das Bild im Frequenzbereich an, wird man feststellen dass ab 1/10 Nyquistfrequenz wohl das Rauschen bei weitem das Nutzsignal aus den Kreisen übersteigt. Man erhöht also lediglich das Messrauschen für einen Algorithmus der nicht das ganze Bild auswertet sondern nach "Features" sucht, also nur wenige Pixel verrechnet von einem Kreis der aus Tausenden besteht. Ich habe die fft transformation des Beispielbildes angehängt. Sie umfasst 10^4 von schwarz zu weiss und ist fnull auf mitte zentriert. Die Information der Kreise ist sehr nahe am hellen Mittelpunkt, da sehr niederfrequent. Die höherfrequenten Teile der Kreise sind zu schwach um über das Rauschen zu kommen. Die Linien sind der sinc des Rechtecks im Bild.
Das muss ich mir erst näher ansehen. Kann es sein, dass das alles dieselben Bilder sind? Ich sehe den Unterschied nicht.
Feine Unterschiede im letzten. Da sieht man den "sinc" des rechtecks als das in der helligkeit modulierte kreuz.
Angehängte Dateien:
-

HoughBall.jpg
16 KB

Ich habe mal von von der 10%-Skalierung eine Hough-Transformation gemacht: Wie man im Bild sieht, kann man den gefüllten Kreis gut erkennen bzw. die Koordinaten bestimmen. Dass der (weisse) Kreis an den Rändern abgeschnitten ist ändert nichts an der guten Erkennbarkeit.
Auf welchen Ausschnitt bezieht sich das? Müssten da nun nicht zwei Peaks sein, da ja auch zwei Kreisausschnitte im Bild sind?
Angehängte Dateien:
-

bla.png
35 KB

Ich habe mal von dem 'preprocessed' Bild ne Hough Transformation gemacht, da findet man die Kreise wunderbar und ohne jede Schwierigkeit. Und es entstehen wieder diese schönen, zarten, feengleichen Bilder der Houghräume ;-) . Hough ist für die Aufgabe geschaffen, es gibt auch Houghvarianten für Ellipsen. Matlab Code anbei, der läuft bei mir paar Sekunden, eine Schleife kann man auch noch rausschmeissen, ist mir aber wg. Müdigkeit nicht mehr gelungen. War großer Spaß. Gute Nacht Cheers Detlef
1 | clear |
2 | |
3 | M=imread('c:\\matlab\\myfiles\\powersolutioncloudpostprocessed.jpg ','jpg');
|
4 | M=double(M); |
5 | kkr=350/2; % kleiner Kreis Radius |
6 | gkr=750/2; % grosser Kreis Radius, beide geschaetzt |
7 | M=M/max(max(M)); |
8 | M1=M>0.9; |
9 | ind=find(M1==1); |
10 | n=size(M1); |
11 | nzei=n(1);nsp=n(2); |
12 | M2=zeros(size(M1)); |
13 | %for(k=1:length(ind)) |
14 | % M2(rem((ind(k)-1),nzei)+1,fix((ind(k)-1)/nzei)+1)=1; |
15 | %end; |
16 | ind=[(rem((ind-1),nzei)+1) fix((ind-1)/nzei)+1]; |
17 | %for(k=1:length(ind)) |
18 | % M2(ind(k,1),ind(k,2))=1; |
19 | %end; |
20 | M2((ind(:,2)-1)*nzei+ind(:,1))=1; |
21 | M3=zeros(size(repmat(M,3,3))); |
22 | |
23 | zoff=nzei; |
24 | soff=nsp; |
25 | kk=kkr*exp(j*linspace(0,2*pi,fix(kkr*2*pi*1.1))); |
26 | gk=gkr*exp(j*linspace(0,2*pi,fix(gkr*2*pi*1.1))); |
27 | kk=kk(:); |
28 | gk=gk(:); |
29 | for(k=1:length(kk)) |
30 | length(kk)-k |
31 | ko=ind+repmat([real(kk(k)) imag(kk(k))],length(ind),1); |
32 | ko=ko+repmat([zoff soff],length(ind),1); |
33 | for(nn=1:length(ko)) |
34 | M3(fix(ko(nn,1)),fix(ko(nn,2)))=M3(fix(ko(nn,1)),fix(ko(nn,2)))+1; |
35 | end; |
36 | end; |
37 | for(k=1:length(gk)) |
38 | length(gk)-k |
39 | ko=ind+repmat([real(gk(k)) imag(gk(k))],length(ind),1); |
40 | ko=ko+repmat([zoff soff],length(ind),1); |
41 | for(nn=1:length(ko)) |
42 | M3(fix(ko(nn,1)),fix(ko(nn,2)))=M3(fix(ko(nn,1)),fix(ko(nn,2)))+1; |
43 | end; |
44 | end; |
45 | return |
Das sieht gut aus, allerdings kam ich bei mir nicht dahin. Gfs mache ich auch was Falsch. Aber: Mir stellt sich die Frage, wie Du die Kreisgröße bestimmst. Schätzen ist ganz gut, das kann ich aber bei mir nicht machen. Denkbar wären verschiedene Annahmen. Muss jetzt erstmal Deinen Code inspizieren.
Nach der Hough-T braucht es aber auch nochmals einen Schritt, um die Schwerpunkte zu finden und die korrekten Radien zu bestimmen. Wenn die Bilder erst einmal so vorprozessiert sind, kann man die Punkte auch mit einer allgemeinen Ellipse fitten. Lage, Orientierung und Durchmesser kommen dann automatisch bei raus. Es müssen eben zuvor nur zusammenhängende Punkte selektiert und Gewichtungen für die lineare Optimierung bestimmt werden. Wenn man die Lage und die Form einmal ungefähr hat, kann man das von Bild zu Bild machen unter Ausnutzung der Parameter und Fenster aus dem Vorbild. Die neue (leicht veränderte) Lage und die Position bekommt man dann am Ende des Frames. Geht in einem FPGA komplett in Echtzeit in einem einzigen Durchlauf. Mit etwas Intelligenz lassen sich beliebig viele matcher aufsetzen, die mehrere Objekte on the fly finden und verfolgen. Das Problem ist dann nur, die matcher profiles randseitig passend virtuell zu maskieren, damit sie auch für Objekte mit teilerhobenen Abbildungen passen. Detlef _a schrieb: > Und es entstehen wieder diese schönen, zarten, feengleichen Bilder der > Houghräume ;-) . Ich sag's doch immer: So schön kann Mathe sein.
Und noch mein Senf: 1. Glätten 2. Sobel-Filter 3. Fast Radial Symmetrie Transformation (wurde hier noch nicht genannt) 4. Morphologische Operationen 5. Schwerpunkte von den Elementen im Ergebnisbild bestimmen.
>> Aber: Mir stellt sich die Frage, wie Du die Kreisgröße bestimmst.
Guter Punkt. Ich hatte sie per Hand aus den Bildern geschätzt, bei dem
großen Kreis hatte ich mich auch verschätzt wie man an dem Houghraum
sieht. Je 'schärfer' die peaks werden umso besser triffst Du den Radius.
Ich hatte mal sowas für einen Pupillentracker programmiert, da habe ich
einen kleineren und einen größeren Kreisradius mitberechnet und gekuckt,
wer besser paßt und ggf. nachgezogen, ging ganz gut. Gibts tonnenweise
Veröffentlichungen zu.
Cheers
Detlef
Georg B. schrieb: > Mir stellt sich die Frage, wie Du die Kreisgröße > bestimmst. Ganz einfach: Die HT dient ja zur Abschätzung von Parameter, d.h. je Parameter hast du eine HT-Dimension. Bei dir sind es also X,Y und Radius, d.h. 3 Dimensionen. Als Resultat bekommst du damit ein Volumen (und nicht wie hier in den Bildern eine 2D-HT). Für den Anfang ist es aber besser, zu einem geg. Bild den Radius zu schätzen und sich die 2D-HT zu betrachten. Unterschied mein Bild/Detlef's Bild: Bei meinem Bild habe ich keine Kreislinien-Transformation gemacht, Detlef's HT dagegen ist die HT der Kreislinien, gut zu erkennen an den feinen Liniengespinnsten (das hängt aber auch vom Algorithmus ab, ist wie bei GPU-Texture-Mapping, wo ich von Def-Raum in Bild-Raum oder aber auch treibend vom Bild-Raum aus dem Def-Raum Farb-Infos berechne/ziehe. Der 2. Ansatz auf die HT angewendet eliminiert diese Gespinnste und du bekommst eine glatte Fläche). Parameter schätzen: Ist auch wieder eine schwierige Aufgabe, aber wenn das (oft sehr glatte!) HT-Bild patchweise polynom. approximiert wird, dann lässt sich leicht an den Maxima der Parameter abschätzen, oder aber auch an der Qualität der Maxima (Stichwort Steigung) abschätzen, ob das Objekt gut oder schlecht geschätzt werden kann.
Gäbe es eine Möglichkeit, die Grösse direkt zu ermitteln oder brauche ich zwei Ergebnisse mit zwei Annahmen um dann je nach Güte des Ergebnisses die Mitte zu finden?
Nicht Bruteforce HT sondern ein Ransac-HT-Mixmax: 1. Kantenpunkte suchen 2. Kreis aus jeweils 4 zufällige Kantenpunkten bestimmen 3. Mit den Kreisparametern den Houghraum füllen 4. Wiederholen ab 2., wenn noch keine 2 Häufungen erkennbar sind 5. 2 x Kreis fitten alternativ, mehr Ransac: 1. Kantenpunkte suchen 2. Kreis aus jeweils 4 zufällige Kantenpunkten bestimmen 3. Mit den Kreisparametern den Houghraum füllen 4. Wiederholen ab 2., wenn noch keine Häufungen erkennbar ist 5. Kreis fitten 6. Alle Ktenpunkte wegschmeißen, die nicht zum Kreis gehören 7. Wiederholen ab 2. für 2.Kreis. So würde ichs machen: 1. Kantenpunkte suchen 2. Kreis aus jeweils 4 zufällige Kantenpunkten bestimmen 3. Nur Kreismittelpunkt 2D Array füllen 4. Wiederholen ab 2., wenn noch keine N Mittelpunkte in max delta r entfernung. 5. Häufung der Abstände der Kantenpunkte zum Mittelpunkt bestimmen = r 6. Kreis fitten 7. Alle Ktenpunkte wegschmeißen, die nicht zum Kreis gehören 8. Wiederholen ab 2. für 2.Kreis. Grüße Schiko
Angehängte Dateien:
-

bla.png
11 KB
Hallo Schiko,
nein, so geht das nicht.
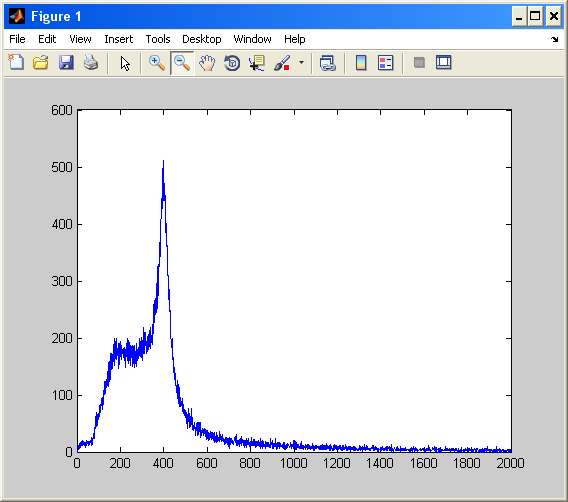
3 Punkte (nicht 4) bestimmen einen Kreis. Wenn Du jetzt aus dem
schwarz/weiss Bild zufällig 3 Punkte auswählst und die Verteilungsdichte
der Radien der entstehenden Kreise darstellst, kommst Du für 100k
Punktetriplets auf die angehängte Kurve. Der Radius bei 175 ist nicht
vorhanden, der bei ca 375 ist verschoben. Das ist auch anschaulich: Es
ist relativ unwahrscheinlich, 3 'gute' punkte zu treffen, das Rauschen
des Binärbildes 'verwischt' vorhandene peaks. Ausserdem ist das kein
Verfahren, das linear mit der Anzahl der Punkte wächst sondern in der
dritten Potenz, sowas taugt in der Regel nichts.
Gute Nacht
Detlef
clear
M=imread('c:\\matlab\\myfiles\\powersolutioncloudpostprocessed.jpg
','jpg');
M=double(M);
kkr=350/2; % kleiner Kreis Radius
gkr=750/2; % grosser Kreis Radius, beide geschaetzt
M=M/max(max(M));
M1=M>0.9;
ind=find(M1==1);
n=size(M1);
nzei=n(1);nsp=n(2);
M2=zeros(size(M1));
%for(k=1:length(ind))
% M2(rem((ind(k)-1),nzei)+1,fix((ind(k)-1)/nzei)+1)=1;
%end;
ind=[(rem((ind-1),nzei)+1) fix((ind-1)/nzei)+1];
n=length(ind)-1;
rrr=zeros(1,2000);
nnn=100000;
for(nn=1:nnn)
nnn-nn
x1=ind(fix(n*rand(1)+1),:);
x2=ind(fix(n*rand(1)+1),:);
x3=ind(fix(n*rand(1)+1),:);
n1=x1-x2;
n1=n1/norm(n1);
n2=x1-x3;
n2=n2/norm(n2);
xx=inv([n1 ; n2])*[n1*(x1+x2)'/2;n2*(x1+x3)'/2];
rr=norm(xx'-x1);
rr=fix(rr);
if(rr>0) if (rr<2000)
rrr(rr)=rrr(rr)+1;
end;end;
end;
return
Detlef _a schrieb: > nein, so geht das nicht. > 3 Punkte (nicht 4) bestimmen einen Kreis. Solange Du nur die 4 Punkte meinst, hast Du Recht, der verdammte Auslug ins Flächenland.. ;-) ansonsten nicht. > Wenn Du jetzt aus dem > schwarz/weiss Bild zufällig 3 Punkte auswählst und die Verteilungsdichte > der Radien der entstehenden Kreise darstellst, kommst Du für 100k > Punktetriplets auf die angehängte Kurve. Der Radius bei 175 ist nicht > vorhanden, der bei ca 375 ist verschoben. Das ist auch anschaulich: Es > ist relativ unwahrscheinlich, 3 'gute' punkte zu treffen, das Rauschen > des Binärbildes 'verwischt' vorhandene peaks. Ausserdem ist das kein > Verfahren, das linear mit der Anzahl der Punkte wächst sondern in der > dritten Potenz, sowas taugt in der Regel nichts. Das habe ich auch nicht beschrieben. 1. Kantenpunkte ermitteln(!), die "weißen" Punkte aus powersolutioncloudpostprocessed.jpg o.ä. Gradientenermittlung wie auch immer gefiltert. Aus ein paar(!) Durchläufen, nicht hunderten oder tausenden, mit 3 zufälligen Punkten aus dieser Menge hast Du ratzfatz die "ungefähren" gesuchten Mittelpunkte oder Radien. Dito Gutu Nacht Schiko
Angehängte Dateien:
-

kreisfitting.gif
46 KB
{kind=link}
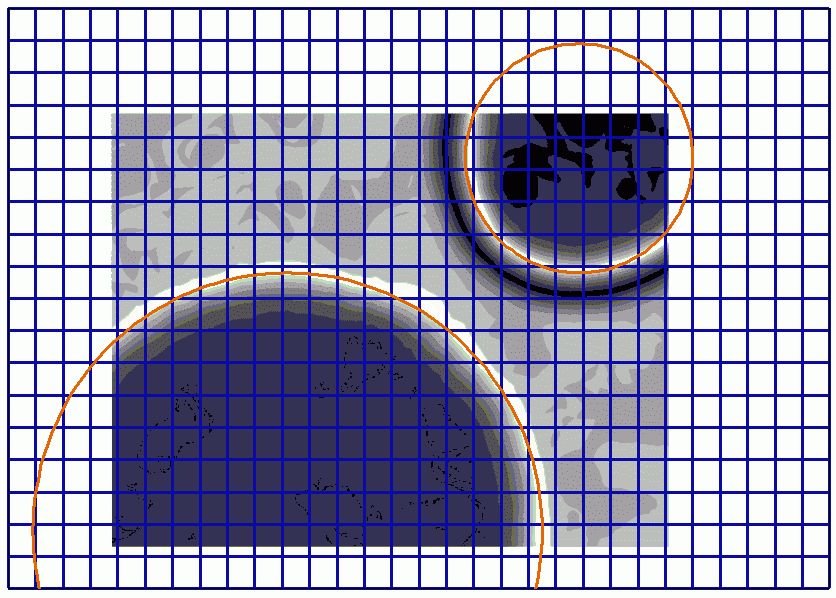
Michael Schikora schrieb: > Aus ein paar(!) Durchläufen, nicht hunderten oder tausenden, > mit 3 zufälligen Punkten aus dieser Menge > hast Du ratzfatz die "ungefähren" gesuchten Mittelpunkte oder Radien. Worin siehst Du den Vorteil dieser iterativen Methode? Das ergibt doch auch nur eine Reihe von statistischen Werten, die man dann wieder mitteln/filtern müsste. Das geht doch mit einer linearen Optimierung direkt, zumal, wenn man es mit einem DSP oder Microcontroller machen kann. Anbei ein Bild mit einem fit von 32 Punkten, die "weiss genug" und "genügend gut zusammenhängend" und "ausreichend gut verteilt" sind. Das kann man problemlos auf 64 Punkte ausdehnen, um es weiter zu stabilisieren. Mit einem modifizierten Gauss-Verfahren in Determinanten-Struktur ist das ein Leichtes, das zu fitten. Um es konkret zu machen, brauchte vor ziemlich geau 20 Jahren ein MS-DOS 16 Bit-Programm (MS-DOS 6.0) mit dem sogenannten "huge memory model" (was waren das Zeiten) auf einem 486DX33 aus der Erinnerung heraus rund 3 Sekunden :-) Ich meine, das packt heute sogar ein AVR schneller, oder? Nachtrag: Als Idee, ließe sich die Optimierung im vorliegenden Fall sogar direkt auf den 3-dimensionalen Raum ausdehnen.
Leider ist es mir komplett entgangen, daß es hier noch weitergegangen ist. Muss mal die Benachrichtigung einschalten, denke ich. Mich würde es interessieren, wie man das fitting optimieren kann. Die Diskussion war wohl die, ob man drei oder 4 Kreise nimmt. Nach meinem Verttändnis wäre mehr beser. Als fit braucht man keine exakte Kreisgleichung, sondern eine linear Optimierung. Wie wirft man unsinnige Werte aus der Gleichung?
Indem Du mit einer geeigneten Strategie prüfst, ob das, was 3 Punkte an "Kreis" vortäuschen, einigermaßen zum 4. passt. Man darf auch gerne 5 Punkte nehmen und schauen, ob der 6. passt. Die frage ist, wie man die Aspekte: "das, was einige vorgeben", "Kreis" und vor allem "Passen" im Detail weich und zugleich hart genug formuliert. Mit etwas Geschick kann man das so formulieren, das man keine Iteration benötigt, sondern nur eine Mischung aus Mehrheitsentscheid und Statistik (Minimedian). Gerade dieses: "das, was einige vorgeben", spannt nämlich nehr, als eine Lösung auf, was ein zweidimensionales Optionsfeld für die diskrete Entscheidung "passt" und "in DIESEN Kreis" zur Folge hat. Sowas kann man interativ in C formulieren, validieren, vereinfachen und sogar in eine Pipeline ausrollen, um sie in einen FPGA zu stopfen, der alle Entscheidungen in einem Takt je Datenpunkt fällt und Punkte zulässt oder nicht. Geht dann mit dem Horizontaltakt eines Video :-) Die Geschichte geht auch in solche Fragestellungen nach noch deutlich komplexeren Strukturen rein, insbesondere, wenn die Vorgabemenge etwas komplizierter (mehr Rauschen, Fehlbelichtung etc) ist, als in diesem Beispiel: Beitrag "Re: Bildverarbeitung; Skeleton-Berechnung"
Jürgen S. schrieb: > Indem Du mit einer geeigneten Strategie prüfst, ob das, was 3 Punkte an > "Kreis" vortäuschen, einigermaßen zum 4. passt. Man darf auch gerne 5 > Punkte nehmen und schauen, ob der 6. passt. Wie unterscheidest Du, wenn zwei Kreise existieren? Ich meine, man kann eigentlich immer einen Kreis durch 3 Punkte legen. Also könnte man A.B.C nehmen und dann D verwerfen. Oder man nimmt B.C.D. und verwirft A. ?
Du würdest prüfen, welcher der 3er-Kombinationen zu ähnlichen Kreisen führen. Das wäre ja das Kriterium für die richtigen Punkte, bzw für die, die man verwerfen müsste.
Nach längerer Zeit ein kleines update: Es wurden am Ende bis zu 16 Punkte verwendet, um Kreisgleichungen zu definieren und zu lösen, weil die Rechenpower vorhanden war und die Aufgabe es auch nötig machte, besonders bei weitgehend verrauschten Bildern.
Wie werden die Punkte zuvor unterschieden, um sie überhaupt den Kreisen zuzuordnen? Es dürfen ja nur solche Punkte mit in die Ausgleichsrechnung, welche zu einem Kreis gehören und nicht etwa zu dem anderen. Was passiert mit Punkten, die zu beiden Kreisen gehören (können)?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.