Hallo mikrocontroller.net! Ich habe eine Problem und hoffe das ich hier im Forum vielleicht Antworten finde. Und zwar geht es um die Steuerung/Regelung eines Elektromotors. Kurz zur Problemstellung: Ich habe eine einfache Profilschienenführung die über eine Zahnstange-Ritzel System angetrieben wird. Also der Elektromotor treibt ein Zahnrad an, das die Profilschiene über die Zahnstange hin und her verschiebt. An vorgegebenen Stellen sollte der Motor stoppen (z.B. alle 10mm). Vor und zurückfahren sollte auch möglich sein Der Motor sollte eine Drehmoment von mindestens 0,4 Nm erzeugen. Des Weiteren würde ich den Motor gerne vom PC aus ansteuern können (Eventuell geht das ja mit Matlab?? Also ich würde gern ein kleines Programm schreiben können, das dem Motor die Position vorgibt). Nun meine Fragen: 1. Welchen Motortypen verwende ich am schlausten (Servomotor oder doch einen enifachen 230V Asynchronmotor oder etwas ganz anders)? 2. Wie kann ich den Motor steuern und welche Komponenten benötige ich dafür? Ich hoffe ich könnte mein Problem euch etwas näher legen und hoffe auf ein paar Rückmeldungen von euch.
Vermutlich brauchst du auch noch Endschalter.... Und die Auswertung würde ich keinem PC überlassen. (Denn dann rennt es dir gnadenlos über die Endschalter in die Wand....) chris_qube schrieb: > einen enifachen 230V Asynchronmotor Schwierig zu positionieren, so in klein klein. Also Schrittmotor Oder Bürstenmotor, mit irgendeiner Positionserkennung
chris_qube schrieb: > 1. Welchen Motortypen verwende ich am schlausten (Servomotor oder doch > einen enifachen 230V Asynchronmotor oder etwas ganz anders)? > > 2. Wie kann ich den Motor steuern und welche Komponenten benötige ich > dafür? 0.4Nm sind nicht viel, das schafft sogar ein Schrittmotor. Bei Gleichstrom(servo)motoren braucht man ein Getriebe und natürlich einen Wegstreckennehmer. Daher wird es wohl ein Schrittmotor werden, die sich mit den üblichen Schrittmotortreibern wie TB6560 im Mikroschritt ansteuern lassen.
Ich habe für eine ähnliche Positionieraufgabe einfach ein 10fach-Poti an ein Ritzel gekoppelt, das auch auf der Zahnschiene läuft. Angesteuert wird die Geschichte von einem AVR mit L293D als Endstufe. Der Motor ist ein Getriebemotor (von Conrad) und bewegt wird ein 7"-Touchscreen (Pollin). Der Poti-Ritzel-Durchmesser ist so gewählt, dass das Poti auf der gesamten Strecke fast den gesamten AC-Wertebereich abdeckt. In meinem Fall sind das knapp 10 Umdrehungen auf 250mm Zahnschiene.
Bis auf das geforderte Drehmoment könnte dieser Schrittmotor mit fertiger Elektronik was sein: PD2-110-42-485 Alternativ diese Steuerung und einen passenden Stepper dazu kaufen: TMCM-1110
Vielen Dank für die ganzen Antworten. Es war auf jeden Fall schon einigers beauchbares bei den Antworten dabei. Jedoch hab ich jetzt noch ein paar Fragen zu eingen Dinge die mir noch nicht so ganz klar sind. 1. Wie würde denn so eine Schaltung ganz praktisch aussehen? Also ich hätte einen Microcontroller diesen kann ich mit dem PC verbinden. Vom PC aus kann ich über meinen Programmcode dem Micocontroller Geschwindigkeit, Drehrichtung und Start Stopp vorgeben. Der Micrcontroller gibt den Befehl an den Motor weiter?! Ist das so vom Prinzip her ok? 2. Hat der Motor eine externe Stromversorgung oder geht das auch über den Microcontroller? 3. Wie sieht die Verbindung zwischen dem normalen 230V anschluss un dem Motor aus?? Ich entschuldige mich schon mal für die Fragen (Bin leider nur einfacher Maschinenbau Ingenieur und habe von den obern gennanten Dingen nicht viel Ahnung), hoffe aber sie sind einiger Maßen verständlich.
1 Prinzipiell ja 2 Der Motor braucht eine eigene Stromversorgung da ja meist höher als die für den µC. 3 Ein einfaches Netzteil von 230V auf die benötigte Motorspannung.
a) um welchen Verfahrweg geht es eigentlich? b) wie genau muss die Positionierung sein? c) ist zu Beginn einer Benutzung das Anfahren eines Referenzpunktes gestattet?
chris_qube schrieb: > 1. Wie würde denn so eine Schaltung ganz praktisch aussehen? > Also ich hätte einen Microcontroller diesen kann ich mit dem PC > verbinden. Vom PC aus kann ich über meinen Programmcode dem > Micocontroller Geschwindigkeit, Drehrichtung und Start Stopp vorgeben. > Der Micrcontroller gibt den Befehl an den Motor weiter?! Ist das so vom > Prinzip her ok? ja > 2. Hat der Motor eine externe Stromversorgung oder geht das auch über > den Microcontroller? Eher andersherum: Der Mikrocontroller wird aus der Stromversorgung des Motors mit versorgt - der braucht nämlich im Gegensatz zum Motor fast keinen... > > 3. Wie sieht die Verbindung zwischen dem normalen 230V anschluss un dem > Motor aus?? Zur Drehzahlregeelung brauchst du einen Frequenzumrichter. Sowas gibt es aber auch schon als komplette Steuerung, die man über eine Schnittstelle per PC steuern kann. (Automatisierungstechnik). > > Ich entschuldige mich schon mal für die Fragen (Bin leider nur einfacher > Maschinenbau Ingenieur und habe von den obern gennanten Dingen nicht > viel Ahnung), hoffe aber sie sind einiger Maßen verständlich. Kann ja mal vorkommen ;)
Frank E. schrieb: > a) um welchen Verfahrweg geht es eigentlich? > b) wie genau muss die Positionierung sein? > c) ist zu Beginn einer Benutzung das Anfahren eines Referenzpunktes > gestattet? +d) sind unterschiedliche Geschwindigkeiten erforderlich (außer Start/Stop-Rampen) Nachtrag (weil schon jemand anderes einen Beitrag nachgeschoben hatte, konnte ich meinen nicht mehr editieren): Wie (fast) immer fehlen wichtige Informationen in der Problembeschreibung. Allerdings: Aus eigener Erfahrung weiss ich, wenn man das Problem wirklich umfassend beschreibt, gibts genauso jede Menge "hilfreicher" Kommentatoren, die nur die Hälfte lesen bzw. Vorgaben gnadenlos ingnorieren - man kann es eben nie allen recht machen ...
chris_qube schrieb: > Ich entschuldige mich schon mal für die Fragen (Bin leider nur einfacher > Maschinenbau Ingenieur und habe von den obern gennanten Dingen nicht > viel Ahnung), hoffe aber sie sind einiger Maßen verständlich. Soetwas wie Verfahrgeschwindigkeit sollte dir dann allerdings geläufig sein und auch in der Spezifikation des Antriebs auftauchen. Jeder passend diemensionierte Getriebemotor wird ansonst dieses Drehmoment hinbekommen. chris_qube schrieb: > Der Motor sollte eine Drehmoment von mindestens 0,4 Nm
chris_qube schrieb: > 1. Wie würde denn so eine Schaltung ganz praktisch aussehen? > Also ich hätte einen Microcontroller diesen kann ich mit dem PC > verbinden. Vom PC aus kann ich über meinen Programmcode dem > Micocontroller Geschwindigkeit, Drehrichtung und Start Stopp vorgeben. > Der Micrcontroller gibt den Befehl an den Motor weiter?! Ist das so vom > Prinzip her ok? Wolltest du nicht einen Zielpunkt vorgeben und dann fährt der Motor selbst dort hin ? Zu klären wäre immer noch, ob ein einfacher Schrittmotor oder ein Gleichstrommotor mit Längensensor. Reicht als Längensensor ein Poti tut es ein Servo-IC wie TLE4206 und TDA3629 bis 0.8A, MC33030 bis 1A, DRV590/591/593/594 regeln Motoren bis 3A durch PWM. Ist dir ein Poti genau genug ? Man weiss ja nichts, weil du alles über dein Geheimprojekt verschweigst. Man kann auch optische Streifenencoder aus Tintenstrahldruckern verwenden, LM629. > 2. Hat der Motor eine externe Stromversorgung Ja. > oder geht das auch über den Microcontroller? Nein. zu schwach. > 3. Wie sieht die Verbindung zwischen dem normalen 230V anschluss un dem > Motor aus?? Netzteil (Notfalls Batterie oder Akku).
Tut mir Leid das ich das Projekt nicht richtig erläutert habe. Ich versuche es noch einmal. Es geht um eine Messstation (Kasten mit den Maßen 2,8 x 2,5 x 2 Meter) in deren Mitte ein Versuchstand mit Platte liegt, die über einen Piezoaktor in Schwingungen versetzt wird. Die Schwingungen der Platte sollen über ein Mikrofon aufgezeichnet werden. Nun ist es aber so, dass das Mikrofon nicht nur an einer festen Stelle die Schallintensität messen sollte, sondern an viel Punkten. Aus diesem Grund würde ich gerne über 2 Profischieneführungen das Mikrofon verschieben können. Es sollen also auch 2 Motoren installiert werden, die über das oben bereits erwähnte Ritzel Zahnstangensystem, das Microfon in x bzw y Richtung verschieben lassen. Am Ende sollte das Mikrofon gitterförmig die Messungen durchführen. Also das Mikrofon 5 mm verschieben Messung aufnehmen (bzw. eine Gewisse Zeit warten) und dann wieder 5 mm Verfahren. Es entsteht ein Gitter mit einigen Messpunkten. (Der Verfahrweg sollte in beide Richtungen bis 2000mm betragen, kann aber auch kleiner sein, je nach Größe der zu messenden Platte). Den Rest hatte ich ja erläutert. Beide Motoren sollte vom Pc mit einem Programmcode in LabView oder MATLAB angesteuert werden können. Ich hoffe mal jetzt ist das Problem richtig erläutert. ;)
Das hört sich so an, als ob da ein kleiner Wagen reicht, der über Zahnriemen/Zugseil von einem Schrittmotor mit Zahnriemenscheibe/Seilrolle transportiert wird. Welche Masse hat das Mikrophon? Wie kommst du auf die 0.4Nm?
@ chris_qube (Gast) >messen sollte, sondern an viel Punkten. Aus diesem Grund würde ich gerne >über 2 Profischieneführungen das Mikrofon verschieben können. Es sollen >also auch 2 Motoren installiert werden, die über das oben bereits >erwähnte Ritzel Zahnstangensystem, das Microfon in x bzw y Richtung >verschieben lassen. So wie ein Plotter. Vergiss Zahnstangen, nimmt Zahnriemen, so wie es einfache 3D Drucker machen. Zur Positioneierung nimmt man Schrittmotoren. Da braucht man auch nicht unbedingt eine Positionsrückmeldung. Mikrotaster sind dafür so oder so ungeeignet. >hatte ich ja erläutert. Beide Motoren sollte vom Pc mit einem >Programmcode in LabView oder MATLAB angesteuert werden können. Naja, du wirst dir sinnvollerweise eine fertige Schrittmotorsteuerung besorgen, die sich um die Sache kümmert. Der PC gibt dann nur per USB Befehle ala gehe zu X,Y
Bitte beachte folgendes: 1. Ein Mikrofon wiegt fast nichts. Was gut ist. 2. Eine größere Konstruktion beeinträchtigt die Schallausbreitung. 3. Normalerweise produziert eine einfache Konstruktion Eigenschwingungen, so dass das "durchgehende" Messen nicht möglich ist. 4. Du brauchst eine vernünftige Leitungsführung. Am besten eine, bei der die Leitungen nicht schon bei der 10. Verfahrung das zeitliche segnen. 5. Denk mal über das Gleiten (POM) nach. Fast geräuschlos.
Falk B. schrieb: > So wie ein Plotter. Vergiss Zahnstangen, nimmt Zahnriemen Man könnte sogar was völlig abgedrehtes bauen: 3 (Schritt-)Motoren haben jeweils eine Seilrolle und das Mikrophon wird an den Seilenden montiert. Je nach dem, welche Motoren wie weit aufwickeln, kann das Mikro jeden Ort zwischen den 3 Motoren erreichen, es hängt dort am gespannten Seil frei im Raum. Die Berechnung, welcher Ort es ist, ist komplexer als bei XY Schienen, aber der mechanische Aufbau ist supersimpel und die gespannten Schnüre entkoppeln gleichzeitig das Mikrophon von Bodenschwingungen und beeinflussen das Hörfeld möglichst wenig. Elektrisch leitend kann man sie sogar gleich zur Signalübertragung nutzen.
> Vergiss Zahnstangen, nimmt Zahnriemen Schüttelreim dazu: Das würd' sich für Helmut Rahn ziemen, der lief auch ohne Zahnriemen. https://www.youtube.com/watch?v=1JzrJZ0gIrA
Das Ende eines waagerecht schwenkbaren Armes (mit Mikrofon) und einem weiteren "Ellenbogen"-Gelenk kann man innerhalb einer vorgegebenen Fläche jeden Punkt anfahren - einfacher gehts nimmer (2 Motore bzw. Servos)! Die Software ist evtl. etwas komplizierter, aber das ist trotzdem machbar ...
Apropos, brauchst Du mehr als eine Achse? Kannst Du das Ganze auch um 90° drehen? Wenn ja, das Mikrofon an 2 Drähten in der vertikalen positionieren. Außer den zwei dünnen Drähten, der elektrischen Versorgung des Mikrofones selber, wäre dann nichts Störendendes bzw. Reflektierendes im Strahlungsbereich. Notfalls könnte eine zweite (horizontale) Achse, oberhalb, oder oberhalb und unterhalb, des Schallfeldes liegen.
Viel dank für die Antworten. Also das mit den 3 Fäden ist zwar ne schöne Idee, aber ich denke ich werde bei der anfangs geplanten X-Y Profilschienenführung bleiben. An Zahnriemen habe ich auch schon gedacht und werde diese wohl auch verwende. Da jetzt so viel Antworten gekommen sind, würde ich diese gern noch mal systematisch durch gehen. Zunächst einmal welchen Motor sollte ich verwenden bei eine Last von zirka 1Nm?
Falls es nur ein einzelner Aufbau werden soll - schonmal an Lego Mindstorms Komponenten gedacht?
@chris_qube (Gast) >Zunächst einmal welchen Motor sollte ich verwenden bei eine Last von >zirka 1Nm? Wie kommst du auf 1Nm? Das ist schon recht viel. Schau dir ähnliche Projekte an. 3D Drucker, Bestückungsautomaten, Fräsautomaten etc. Dort sind meistens normale Schrittmotoren drin.
Ja da hast du recht Falk Brunner ... ich werde gleich nochmal die Last am Motor berechnen. Daraufhin kann man ja auch erst einen geeigneten Motor aussuchen.
chris_qube schrieb: > Ja da hast du recht Falk Brunner ... ich werde gleich nochmal die Last > am Motor berechnen. Daraufhin kann man ja auch erst einen geeigneten > Motor aussuchen. Die Last? Du faehrst doch nur ein Mikrofon spazieren oder nicht? Wie schwer kann sowas sein. Ich wuerde mal sagen, dass der Motor hauptsaechlich damit beschaeftigt ist, die Lagerreibung zu ueberwinden
Angehängte Dateien:
-

Skizze_4.JPG
21 KB -

Skizze_3.JPG
48 KB
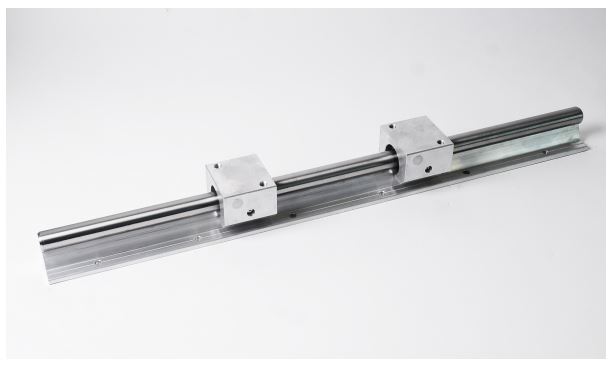
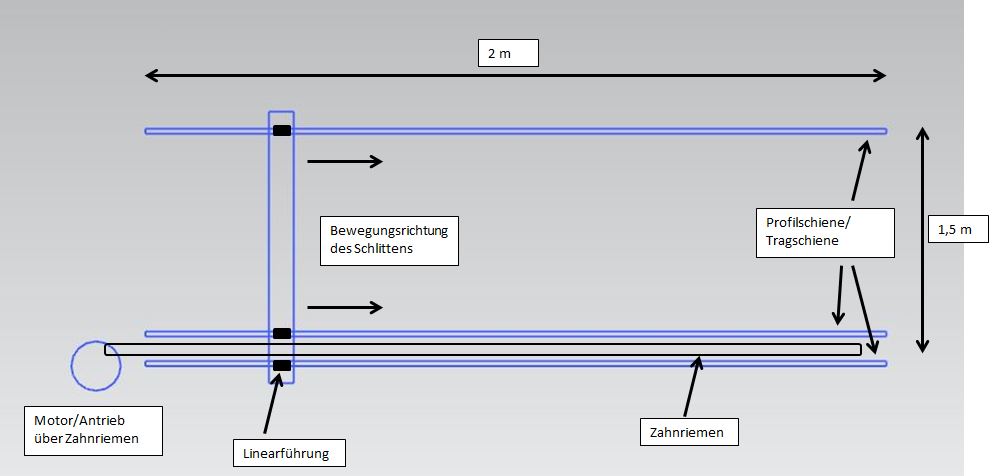
So es hat sich bei meinem Projekt etwas getan. Mechanik des Systems steht und der Motor ist auch ausgewählt. Jetzt hätte ich gerne eure Meinung zu einem Problem. Ich hab im Anhang eine Prinzipskizze mal hochgeladen und wollte mal eure Meinung hören ob sich das System verkanten wird. Gewicht der Führung liegt ungefähr bei 30kg und die Linearführungen sind auch im Anhang dargestellt.
chris_qube schrieb: > Ich hab im Anhang eine Prinzipskizze mal hochgeladen und wollte mal eure > Meinung hören ob sich das System verkanten wird. Ja, wird es. Nur 1 Linearlager und dann 1.5m Breite (2 Lager im Längsabstand von 50cm wären schlauer), ungünstige Anordnung durch Antrieb an einem Rand, und überspezifiziert durch 3 Schienen. 1 mit 2 Lagern reicht, am Ende muss es bloss aufliegen. Ausserdem immer noch kein Positionssensor, keine Idee zur Y-Achse, und für ein Mikrophon 30kg ? Und obwohl schlecht auch noch teuer.
So liebes Forum! Das Projekt schreitet voran. Das Problem mit dem verkanten ist jetzt auch gelöst (Antriebseinheit wird einfach in die Mitte zwischen die beiden Linierlagereinheiten gesetzt). Ebenso habe ich zwei Schrittmotoren (einen großen 3Nm für die X- Bewegung und einen kleinen mit 2Nm für die Y-Bewegung) ausesucht. Die Motoren: Klein: Trinamic QMot Schrittmotor (QSH6018-65-28-210)Hybrid inkel : 1,8° Betriebsspannung : 0 - 84 V/DC Halte-Moment : 2.10 Nm Phasen-Strom (max.): 2.8 A Wel http://www.conrad.de/ce/de/product/197969/Trinamic-QMot-Schrittmotor-Hybrid-18-QSH6018-65-28-210-0-84-VDC-Halte-Moment-210-Nm-Phasen-Strom-max-28-A-Wellen-8-mm?ref=list Groß : Trinamic QMot Schrittmotor Hybrid (QSH6018-86-28-310) Winkel : 1,8° Betriebsspannung : 0 - 84 V/DC Halte-Moment : 3.10 Nm Phasen-Strom (max.): 2.8 A Wel http://www.conrad.de/ce/de/product/197982/Trinamic-QMot-Schrittmotor-Hybrid-18-QSH6018-86-28-310-0-84-VDC-Halte-Moment-310-Nm-Phasen-Strom-max-28-A-Wellen-8-mm?ref=list Ich würde jetzt gerne wissen wie ich diese beiden Motoren ansteuere. Dabei sollte die Geschwindikeit des Motors, sowie die Drehrichtung und Microstepping möglich sein. Was für Kompontenten brauche ich, die ich noch dazukaufen muss? Ich habe mir überlegt: Netztteil für die Stromversorgung (benötige ich da 2 Netzteile für beide Motoren?) Microcontroller (Motorcontroller; Hätte da gern einen von Arduino aber auch ander Hersteller sind ok) Motortreiber (Heißt das Motorendstufe?? Was hat der Treiber überhaupt für eine Funktion?) Encoder (Für die Positionsbestimmung um bestimmte Punkte anzufahren und am Ende wieder in die Ausganslage zurück zu fahren; Ist das nötig??) Benötige ich noch ein extra Gerät um den Motor in Microsteps anzusteuern? Ich weiß sind viele Fragen aber ich hoffe auch auf einige Antworten .
chris_qube schrieb: > Encoder (Für die Positionsbestimmung um bestimmte Punkte anzufahren und > am Ende wieder in die Ausganslage zurück zu fahren; Ist das nötig??) Hmmm.... Du traust den Motoren nicht? Bei der Verwendung von Schrittmotoren, sollten Endschalter/Lichtschranken reichen, um einen Nullpunkt fest zu legen. Encoder machen richtig Sinn, bei der Verwendung von Bürstenmotoren o.ä. chris_qube schrieb: > Motortreiber (Heißt das Motorendstufe?? Was hat der Treiber überhaupt > für eine Funktion?) Die Schalten den Strom für die Motoren. Ja das ist nötig. Und ja die können Microsteps. z.B. Ebay 271884324255 (ist nur ein Beispiel, achte auf Ströme und Spannungen)
chris_qube schrieb: > Klein: > Trinamic QMot Schrittmotor (QSH6018-65-28-210)Hybrid > Groß : > Trinamic QMot Schrittmotor Hybrid (QSH6018-86-28-310) Wolltest du jetzt eine CNC Fräse bauen oder ein Mikrophon verschieben ?
Ich versteh die Frage leider nicht, MaWin?! Ich habe doch bereits versucht so gut es geht mein Problem zu schildern. Weiß jetzt nicht wie du auf eine CNC Fräse kommst. Ich hoffe ich habe keine Kontroversen Angaben gemacht.
MaWin schrieb: > Wolltest du jetzt eine CNC Fräse bauen oder ein Mikrophon verschieben ? Vielleicht unterschätzt du das Mikrophon. https://de.wikipedia.org/wiki/Hohlspiegelmikrofon#/media/File:WW1AcousticMirrorKilnsea%28PaulGlazzard%29Jan2007.jpg
{kind=link}
Es geht darum dass deine Motoren ganz schön viel Wumms (Drehmoment!) haben. Offensichtlich möchtest du deine Last ja recht dynamisch verfahren! Oder warum dann so viel Drehmoment? Werde dir erst mal im klaren worin die Unterschiede zwischen verschiedenen Motortypen liegen. Wieso braucht man bei einem DC-Motor einen Encoder/Weggeber.. bei einem Schrittmotor aber nicht? Egal.. ich beantworte mal deine fragen: Ein Netzteil reicht. Spannung richtet sich nach dem Motortreiber, der Strom nach den Motoren. Also summe aller Motorströme + X. Microcontroller? Ja. Das richtet sich nach deiner Steuerung. Die einfachen werden mit einen Takt-Richtungs-Signal angesteuert. Ein Pin steuert die Motor Richtung, der andere lässt den Motor bei jedem Flankenwechsel einen (Mikroschritt) weiter drehen. Dieses Signal lässt sich mit einem uC generieren. Wenn du nicht gut Arduino programmieren kannst/willst bietet sich eine Steuerung an die Motorrampen etc. selbständig abfährt und auf Steuerbefehle lauscht. (z.b von der Fa. Nanotec.) Da ist dann kein uC mehr nötig weil diese auch direkt vom PC kommen können. Encoder: Nein das brauchst du nicht. Solange der Motor keine Schritte verliert. Wie genau muss deine Anwendung sein? Wie dynamisch? Wie immer: Viele Wege führen nach Rom.
Oder nimm direkt sowas, da musst du dir keine Gedanken zur Mechanik machen: http://www.igus.de/wpck/2370/drylin_zlw Achja und erkläre doch noch schnell wieso dein Mikrofon plötzlich 30kg wiegt?
chris_qube schrieb: > Hallo mikrocontroller.net! Aber Hallo - Hereinspaziert - was geht ab? > Der Motor sollte eine Drehmoment von mindestens 0,4 Nm erzeugen. Da komm ich leider nicht ganz hin mit einem Erstversuch Tip: 34,3 mNm sind es nur: etwas unter 1/10 was du voranschlagst. http://www.pollin.de/shop/dt/NjU0OTg2OTk-/Bausaetze_Module/Module/Schrittmotor_Set_DAYPOWER_S_SPSM_5V.html Schau es dir trotzdem mal an, da gibt es auch andere Motoren dazu. 0,38Nm http://www.pollin.de/shop/dt/NTE0OTg2OTk-/Motoren/Schrittmotoren/Schrittmotor_VEXTA_PXB44H_02AA_C8_1_8_6_V_0_8_A.html 0,9 Nm http://www.pollin.de/shop/dt/NTQ1OTg2OTk-/Motoren/Schrittmotoren/Schrittmotor_PSM57BYGHM201_0_9_.html > Des Weiteren würde ich den Motor gerne vom PC aus ansteuern können Welches Betriebsytem? Welche Schnittstelle? ( Parallel, Seriell, USB, WIFI, Bluetooth..) Selber Proggen? Welche Software? > (Eventuell geht das ja mit Matlab?? Also ich würde gern ein kleines > Programm schreiben können, das dem Motor die Position vorgibt). Matlab sollte gehen. > > Nun meine Fragen: > > 1. Welchen Motortypen verwende ich am schlausten (Servomotor oder doch > einen enifachen 230V Asynchronmotor oder etwas ganz anders)? Ohne an die Kopfstösse zu denken, die ich von Mittippern bekomme, versuch das mal mit dem Set, mini Arduino für 3,50 EUR dazu, das sollte es sein, Test Ansteuern dann über den Uart/Serielles Terminal und in Matlab sollte das auch gehen. Das wäre sozusagen ein Preview Test, so mach ich das immer. > > 2. Wie kann ich den Motor steuern und welche Komponenten benötige ich > dafür? Schrittmotor - Schritttreiber z.B. ULN2003A, den gibt es auch für grössere Lasten und es gibt auch andere. > > Ich hoffe ich könnte mein Problem euch etwas näher legen und hoffe auf > ein paar Rückmeldungen von euch. Na ich hoffe, ich hab dir nicht nur eine günstige alternative aufgezeigt, sondern auch eine brauchbare. Wenn das eine Bachelor Arbeit sein soll, dann nimm auch Endschalter dazu, kleine Mikro Schalter z.B. http://www.pollin.de/shop/dt/MjI4OTc1OTk-/Bauelemente_Bauteile/Mechanische_Bauelemente/Schalter_Taster/Subminiatur_Schnappschalter_CHERRY_DB3.html lg ;-)
chris_qube schrieb: > So liebes Forum! Das Projekt schreitet voran. D... > Ebenso habe ich zwei Schrittmotoren (einen großen 3Nm für die X- > Bewegung und einen kleinen mit 2Nm für die Y-Bewegung) ausesucht. Oha - da hätte ich erst mal weiterlesen sollen - du willst eine eine CNC Fräse bauen? Deine Vorgabe war aber 0,4 Nm?! Dann vergiss den Post von vorhin. lg ;-)
Du willst ein 30 kg Mikrofon verschieben? .. Das sind aber schnelle Projekt Änderungen in einem Atemzug und Thread. Hast du die Aufgabenstellung nicht richtig durchgelesen? ;-) Oder war es morgens ? ;-) MaWin ist dabei - dann kann nichts schiefgehen. .. lg ;-)
Chris_qube schrieb: > Ich versteh die Frage leider nicht, MaWin?! Ich habe doch bereits > versucht so gut es geht mein Problem zu schildern. Weiß jetzt nicht wie > du auf eine CNC Fräse kommst. Ich hoffe ich habe keine Kontroversen > Angaben gemacht. Chris_qube schrieb > Ich habe eine einfache Profilschienenführung > die über eine Zahnstange-Ritzel System angetrieben wird. Also der > Elektromotor treibt ein Zahnrad an, das die Profilschiene über die > Zahnstange hin und her verschiebt Chris_qube schrieb > das ich das Projekt nicht richtig erläutert habe. Ich > versuche es noch einmal. > Aus diesem Grund würde ich gerne > über 2 Profischieneführungen das Mikrofon verschieben können. Es sollen > also auch 2 Motoren installiert werden, Na ja wenn ich ehrlich bin, der Eingangsthread beschreibt etwas um die 0,4 Nm und einem Motor und einer Zahnstange und einem Ritzel und jetzt haben wir X und Y Achsen und der Motor liegt bei 2 bzw 3 Nm. Das sind reinste Kontroversen ;-) Aber gut - wenn du das jetzt mit Falk Brunner ausgerechnet hast, was du an Haltemomente benötigst und nicht nur hin und her sondern auch vor und zurück brauchst. Z wäre noch möglich für die Höhe - dann bräuchtest du aber einen Dritten Motor. Ich denke es wird eine Bachelor Arbeit ;-) ;-)
chris_qube schrieb: > Der Motor sollte eine Drehmoment von mindestens 0,4 Nm erzeugen. chris_qube schrieb: > Zunächst einmal welchen Motor sollte ich verwenden bei eine Last von > zirka 1Nm? chris_qube schrieb: > Ja da hast du recht Falk Brunner ... ich werde gleich nochmal die Last > am Motor berechnen. Daraufhin kann man ja auch erst einen geeigneten > Motor aussuchen. Warum ist das alles nicht von Anfang an berücksichtigt worden? Wusstest du da noch nicht was für Masse auf welchen Verfahrensweg bewegt werden soll? Der ganze Thread scheint irgendwie die Parameter ständig zu verlieren. Am Ende ist es eine Waschstrasse mit grossen 230V Gebläsemotoren und Lichtschranken als Positionsstopper alle 10mm Jetzt sag mal ganz ehrlich wie die ganze Veränderungen von einem 0,4 Nm Motor zu zwei fast 3 Nm zu Stande kommen, da kann dir keiner mehr gezielt einen richtigen Tip geben?! ---
schlank schrieb: > Egal.. ich beantworte mal deine fragen: wieder einer ;-) Ich denke chris hat eine Aufgabe erhalten die er sich annähern soll durch Fragen und deren Antworten er sich dann weiter in die Thematik einarbeitet. Ich denke nicht, dass es ein privates oder gewerbliches Projekt ist, eher eins aus der Forschung eines Versuchaufbaus für ein Prüfling oder gar Teil einer Prüfungsaufgabe ist. > Wie immer: Viele Wege führen nach Rom. Der rote Faden des Thread sagt dir ganz klar : "Schon, aber muss er in Rom enden?" ;-)
chris_qube schrieb: > Ich würde jetzt gerne wissen wie ich diese beiden Motoren ansteuere. > Dabei sollte die Geschwindikeit des Motors, sowie die Drehrichtung und > Microstepping möglich sein. > Was für Kompontenten brauche ich, die ich noch dazukaufen muss? Microstepping?! Du scheinst die Aufgabe eines Projektleiters übernommen zu haben > > Ich habe mir überlegt: > > Netztteil für die Stromversorgung (benötige ich da 2 Netzteile für beide > Motoren?) Hast aber keine Ahnung von Strom, Spannung, Leistung und schon gar nicht von Drehmoment. > > Microcontroller (Motorcontroller; Hätte da gern einen von Arduino aber > auch ander Hersteller sind ok) Das ist jetzt neu?! Wie kommt der Arduino jetzt ins Spiel, wegen den fertigen Stepper Adapter die es für Arduino gibt? > > Motortreiber (Heißt das Motorendstufe?? Was hat der Treiber überhaupt > für eine Funktion?) Der Projektleiter treibt die Projektbeteiligten an das Ziel. Das macht der Motortreiber auch ;-) vor und zurück hin und her und bei CNC auch hoch und runter. > > Encoder (Für die Positionsbestimmung um bestimmte Punkte anzufahren und > am Ende wieder in die Ausganslage zurück zu fahren; Ist das nötig??) Das musst du wissen wie deine Aufgabenstellung lautet, warum Positionen angefahren werden und warum es in 10mm Stopper gibt und überhaubt. Wenn es eine CNC wird, dann solltest du die Maschine wieder auf Ausgangsstellung zurück fahren - ja, damit du das Werkstück entnehmen kannst. Bei einem Mikrofon, wenn es neue Messungen anlaufen soll, sollte es eine Ausgangsstellung haben, ob es eine 0 Stellung oder eine versetzte ist, wird die nächste Aufgabe stellen. > > Benötige ich noch ein extra Gerät um den Motor in Microsteps > anzusteuern? > > Ich weiß sind viele Fragen aber ich hoffe auch auf einige Antworten . Glaube ich ehrlich gesagt nach dem vielen Verhau nicht mehr so eifrig viele. Wenn ich ehrlich bin, war jetzt schade irgendwie um die Zeit. Aber wieder dazugelernt. Bin gespannt ob du das fertige Projekt später mal postest - aber scheib dazu, das es sich auf diesen Thread bezieht, denn ich glaube nicht, dass man es wieder erkennt ;-) alles gute! lg ;-)
eine ganze stunde in dem thread geirrt - unglaublich. und zu ;-)
chris_qube schrieb: > > Es geht um eine Messstation (Kasten mit den Maßen 2,8 x 2,5 x 2 Meter) ich stolpere noch einmal darüber ;-) also 2.8 m auf 2.5m und 2 m hoch? Da passt ja ein Mensch rein ;-) Ist das eine automatische Zwangsfütterung? ;-) Ich habe nachgedacht: Könnte sich um einen Zubringer für das Holzscheit für einen Stückholz Ofen handeln, der nächste WInter kommt bestimmt ;-) guads nächtle ;-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.