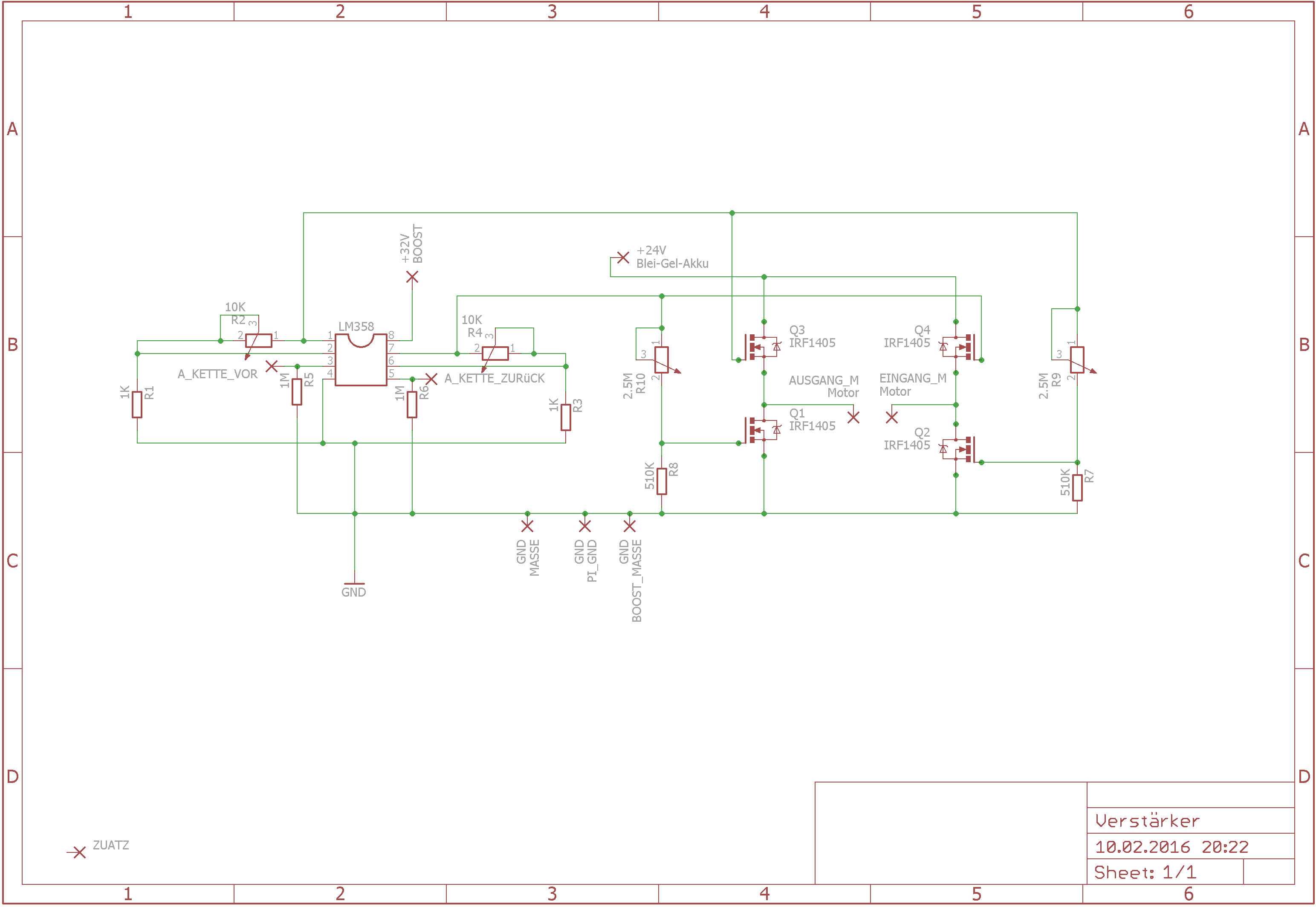
Hallo Zusammen! Ich komme nicht mehr weiter. Ich benutze die Schaltung oben um einen 24V DC Motor mit einem Id von 18,3A zu betreiben. Leider raucht die Schaltung ab, sobald man auch nur versucht den Motor zu bewegen. Vielleicht kann mal jemand schnell einen Blick drauf werfen und mich mal auf einen richtigen Losungsanatz bringen, da ich mit meinem Latein erstmal am Ende bin Zur Funktionsweise: Der LM wird mit 32V gespeist und über die Potentiometer eine Spannung von 30V eingestellt. Die Mosfets IRF1404 werden über einen einstellbaren Spannungsteiler mit einer Spannung von 30V bzw 6V. (Q3 und Q4 mit 30 und Q1 und Q2 mit 6V). Diese sollen mit einer PWM geschaltet werden, die über einen Raspberry Pi erzeugt wird. Somit soll der gewünschte Motor langsam anlaufen, um so den Strom beim Anlaufen zu begrenzen. Problem: So wie es scheint, wird ein zu großer Strom gezogen und die Mosfets so zerschießt, oder uns Leiterbahnen von unserer Platine schießt. Die Platine sollte ausreichend dimensioniert sein. Schonmal vorweg vielen Dank für eure Hilfe
Angehängte Dateien:
-

Schaltplan_1.png
29 KB
wo/wie wird verhindert, dass beide zweige der h-brücke gleichzeitig aktiv sind? wie lang dauert das ein/ausschalten der fets durch den spannungsteiler?
Hallo Robert danke erstmal das du antwortest, Verriegelt wird das ganze durch diese schaltung, die vorgehangen wird. Ich hänge sie hier als Board an, weil ich an den Schaltplan gerade nicht drankomme. Für die Und und Xor Logik werden die IC HEC4081 und HEC4030 verwendet. Die Schaltfrequenz beträgt ungefähr 2,5kHz. Die Schaltung ist bereits an 24V Aktuatoren getesten und scheint dort ohne Probleme zu laufen ...
@ Manuel (Gast) >Ich komme nicht mehr weiter. Ich benutze die Schaltung oben um einen 24V >DC Motor mit einem Id von 18,3A zu betreiben. Leider raucht die >Schaltung ab, sobald man auch nur versucht den Motor zu bewegen. So wenig wie eine Schwalbe einen Sommer macht, so wenig machen 4 MOSFETs eine gescheite H-Brücke. Da fehlen Pegelwandler und Verriegelungsslogik. >Der LM wird mit 32V gespeist und über die Potentiometer eine Spannung >von 30V eingestellt. Die Mosfets IRF1404 werden über einen einstellbaren >Spannungsteiler mit einer Spannung von 30V bzw 6V. (Q3 und Q4 mit 30 und >Q1 und Q2 mit 6V). Diese sollen mit einer PWM geschaltet werden, die >über einen Raspberry Pi erzeugt wird. Somit soll der gewünschte Motor >langsam anlaufen, um so den Strom beim Anlaufen zu begrenzen. AUA!!! Das geht nie und nimmer so!!! >So wie es scheint, wird ein zu großer Strom gezogen und die Mosfets so >zerschießt, oder uns Leiterbahnen von unserer Platine schießt. Die >Platine sollte ausreichend dimensioniert sein. Sollte. Ist sie aber nicht, genausowenig wie deine Schaltung, die VOLLKOMMEN unbrauchbar ist! Eine H-Brücke wird HART geschaltet und die MOSFETs NICHT im Linearbetrieb betrieben. Schon gar nicht über 2MOhm Vorwiderstand! Eine Anlaufstrombegrenzung macht man mittels langsamen Hochfahren der PWM bzw. wenn es absolut sicher sein soll über eine schnelle Strommessung + PWM-Abschaltung, wie sie jeder Schaltregler bzw. jede leistungsfähigere H-Brücke hat. Mein Tip: Kauf dir eine fertige H-Brücke mit einstellbarer Strombegrenzung. Da gibt es tonnenweise Module.
@Falk Aber wenn die Schaltung ja so vollkommend unbrauchbar ist, wieso läuft sie dann im Test und auch bei 24V 5A DC Motoren so probemlos, ohne erhitzungen der Fets oder ähnlichen Anzeichen?
@ Manuel (Gast) >Aber wenn die Schaltung ja so vollkommend unbrauchbar ist, wieso läuft >sie dann im Test und auch bei 24V 5A DC Motoren so probemlos, ohne >erhitzungen der Fets oder ähnlichen Anzeichen? Weil ein blindes Huhn auch mal ein Korn findet.
Ach Mensch. Na dann wird wohl nochmal ordentlich hirnschmalz einfließen lassen. Weißt du denn zufällig wo ich mir diesbezüglich ordentliche Infos einholen kann, damit ich das mal ordentlich nachvollziehen kann? Es harpert ja scheinbar schon in der Theorie Grüße und Vielen Dank
Manuel schrieb: > So wie es scheint, wird ein zu großer Strom gezogen und die Mosfets so > zerschießt, oder uns Leiterbahnen von unserer Platine schießt. Die > Platine sollte ausreichend dimensioniert sein. Alles beginnt damit, den Akku richtig herum anschließen zu wollen. Aber das ist in diesem Fall leider nur der erste Schritt von Hunderten auf dem Wege zum einwandfreien Servoregler.
Ein paar Sachen rund um Dein Projekt:
1. In den Datenblättern, so man sie nur überfliegt, klingen die
Daten zu einem Leistungs-FET meist sehr toll.
- Was man aber nur den eigentlichen Daten entnehmen kann ist,
praktisch gesehen sind die meisten FETs nur als Schalter zu
gebrauchen. Das heißt, ein oder aus, aber kein Zwischenstatus.
- Auch wenn, über alles gesehen, nur sehr wenig Steuerleistung
vonnöten ist, muss die Umschaltung von einem in den anderen
Zustand möglichst schnell gehen. Sonst macht sich der
Zwischenstatus bemerkbar. Also nix mit hochohmiger Ansteuerung.
2. Beim Umschalten einer H-Brücke muss unbedingt die Reihenfolge:
Ersten Zweig sperren und erst dann den zweiten Zweig öffnen,
eingehalten werden. Sonst fließt ein sogenannter Querstrom vom
Positiven zum negativen Pol mit den dann vorhersehbaren Folgen
(Kurzschluss).
3. Bedingt durch die relativ hohe Kapazität des Steueranschlusses,
bei einem FET, reicht es oft nicht aus, scheinbar gleichzeitig ein-
und auszuschalten. In dieser Zeit kann bereits ein "tödlicher"
Querstrom auftreten. Mit ein Grund, warum FETs möglichst niederohmig
angesteuert werden sollen.
Manuel schrieb: > Verriegelt wird das ganze durch diese schaltung, die vorgehangen wird. > Ich hänge sie hier als Board an, weil ich an den Schaltplan gerade nicht > drankomme. Für die Und und Xor Logik werden die IC HEC4081 und HEC4030 > verwendet. schlecht > Die Schaltfrequenz beträgt ungefähr 2,5kHz. das hab ich nicht gemeint. wie lang dauerts von einer änderung des PWM-Signals bis das am motor ankommt. das sollte man sich überlegen, und davon totzeiten, schaltverluste etc. ableiten. einfacher wärs ein fertiges H-brücken-modul zu verwenden. die datenblätter oder appnotes kann man auch zu hintergründen und praktischen problemen durchforsten. wenn schon eigene mosfets, dann bietet sich die verwendung eines fertigen halbbrücken-treibers wie IR2104 an.
Viele Dank für alle Hilfen hier, wie es scheint hat sich das Problem erledigt! Danke :)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.