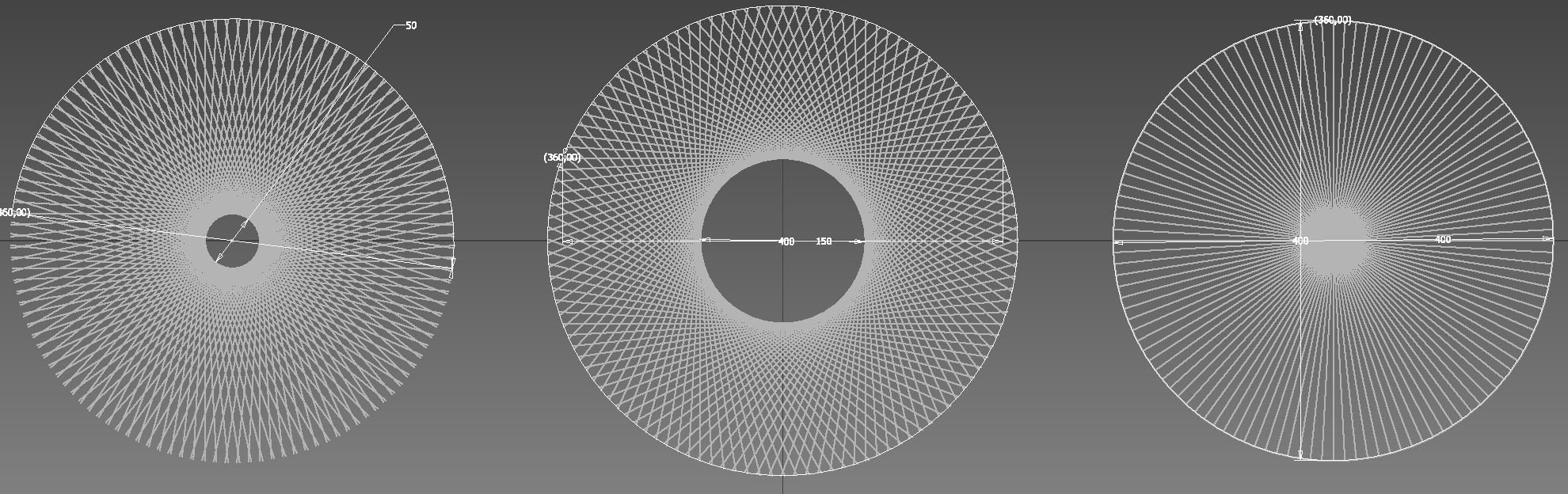
Hallo, Ich befasse mich gerade mit dem Bau eines 3D-Laserscanners (Linenlaser + Kamera), der eine Fläche von ca. 1m Durchmesser vermessen soll, wobei die Höhenuterschiede < 10cm liegen und zumeist "fließend" sind, also keine scharfen Kanten, etc. Man stelle sich einfach eine schön hügelige Landschaft vor. Nun frage ich mich, mit welchem Bewegungsmuster sich über die gesamte Fläche gesehen die beste Auflösung erzielen lässt. A: Linienscan, der über die Fläche mit Schrittweite X "fährt". Ermöglicht natürlich eine hohe Auflösung. Ist aber mechanisch etwas ungünstig. B: Rotation der Linie um eine Achse in X Schritten/360°. Auflösung nimmt mit zunehmender Entfernung vom Mittelpunkt ab. C: Rotation der Linie mit einem Offset von der Mittelachse in X Schritten/360°. Es ergibt sich ein "blinder Fleck" genau unter dem Sensor, dafür wird über die restliche Fläche eine Gitter gelegt, dessen Maschenweite nach aussen hin zunimmt. Trotzdem scheint mir das interessante Möglichkeiten zu bieten, wenn auch in der Auswertung einige Rechnerei notwendig ist. Ich habe das mal schnell mit 120 Linien gezeichnet und angehängt. Links 120 Linien mit kleinerem Offset, mittig mit größerem und rechts ohne Offset. Leider habe ich bisher keine Literatur/ Artikel o.ä. zu dem Thema gefunden. Was denkt ihr, welcher Ansatz die besten Ergebnisse bringt? Kennt ihr lesenswerte Artikel dazu, oder ein übliches Standardverfahren? Bin für jeden Input zum Thema dankbar. Otto
Angehängte Dateien:
-

Muster.jpg
290 KB
Und zum drehenden Teller einen drehenden Linienlaser hinzu, welcher sich um einen Punkt relativ weit außen vom Teller um sich selbst dreht!? Viele Daten, viel rechnen, mittelmäßiger Hardware-Aufwand. Gruß Jobst
:
Bearbeitet durch User
Otto schrieb: > 3D-Laserscanners (Linenlaser + > Kamera) Meinst Du damit das Triangulationsverfahren a la DAVID, also kein LIDAR? http://wiki.david-3d.com/scanning_without_panels_by_hal
Jobst M. schrieb: > Und zum drehenden Teller einen drehenden Linienlaser hinzu, welcher sich > um einen Punkt relativ weit außen vom Teller um sich selbst dreht!? Ich habe so etwas mit Beamer gesehen! Da kannst du das Scanmuster machen wie du möchtest.
Jobst M. schrieb: > Und zum drehenden Teller einen drehenden Linienlaser hinzu, welcher sich > um einen Punkt relativ weit außen vom Teller um sich selbst dreht!? > Viele Daten, viel rechnen, mittelmäßiger Hardware-Aufwand. Nun, die zu scannende Fläche steht leider fest, der Scanner soll darüber positioniert werden. Trotzdem wäre eine zusätzliche Ablenkung des Lasers zu überlegen, danke. Tom schrieb: > Meinst Du damit das Triangulationsverfahren a la DAVID, also kein LIDAR? > http://wiki.david-3d.com/scanning_without_panels_by_hal Ich dachte an das Triangulationsverfahren. Marc H. schrieb: > Ich habe so etwas mit Beamer gesehen! Da kannst du das Scanmuster machen > wie du möchtest. Ja, das ist nochmal "was anderes". Ich habe inzwischen gesehen, dass es LED Beamer für 39€ gibt, allerdings mit nur 240x320px Auflösung und 600lm. Wenn man da etwas mehr ausgibt, ist das sicher auch ein interessanter Ansatz. Da muss ich mich aber noch einlesen.
Otto schrieb: > Kennt ihr lesenswerte Artikel dazu, oder ein übliches Standardverfahren? Ein übliches Verfahren der Lasertriangulation ist deine Variante A, zum Einsatz über Fördertechnik. (Mit dem Unterschied, dass sich nicht Laser+Kamera bewegen, sondern das Fördergut, aber das läuft ja relativ auf das gleiche hinaus) Die Auflösung ist dann in erster Linie von der Kamera abhängig, in Bewegungsrichtung kannst du diese ja durch das Verhältnis von Aufnahmen/Zeit und relativer Bewegungsgeschwindigkeit einstellen. Variiert werden dann vor allem die Winkel zwischen Kamera, Laser und Arbeitsebene, um je nach Anwendung "tote Winkel" zu vermeiden. Ausserdem gibt es Aufbauten mit 2 Kameras und/oder 2 (evtl. verschiedenfarbigen) Lasern. "Hügelige Landschaft" klingt aber ja so, als solltest du damit eher geringe Probleme haben. Einen ähnlichen Ansatz gibt es übrigends auch über Verschattung, also ein Aufbau von oben nach unten mit: Lichtquelle-> "Schattenwerwerfer" -> Kamera, aber das verkompliziert natürlich den Bildverarbeitungs-Part etwas. Falls du den Beamer-Gedanken weiter verfolgst, sind Zeit- und Farbcodierung Ansätze die du dir mal anschauen könntest. (Beleuchtete Zonen unterscheiden sich in Farbe, Struktur, Dicke, ggf. wird eine Folge verschiedener Strukturen projiziert) So ein Aufbau hätte natürlich den Vorteil, das du keine beweglichen Teile benötigst.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.