


Hallo, seit gestern habe ich ein Problem mit meinem Schrittmotor als ich die Spannung erhöht habe. Zunächst die Komponenten: - Controller: DRV8825 (8-45V, max. 2,5A) - Schrittmotor: Nanotec ST6018L3008 (Anschluss: Bipolar/Seriell) - Raspberry Pi und externer Frequenzgenerator geben den Takt für den Stepeingang am Schrittmotorcontroller Bisher habe ich zum Testen ein Netzteil mit festem Spannungswert von 11V benutzt. Die Funktion hierbei ist einwandfrei. Der Schrittmotor soll mit ca. 30V betrieben werden um ein ausreichendes Moment zu erhalten. Daher habe ich ein Netzteil mit verstellbarer Spannung besorgt. Auch hier lief der Motor im Bereich 10-11V rund. Bei der Erhöhung der Spannung kommt er ins Stottern. Die angehängten Schriebe des Oszilloskops zeigen die Stepfrequenz (gelb) und einen der vier Spulenausgänge (blau) für 10V, 11V und 20V. Was ist da los? Vielen Dank für Eure Hilfe, Julia
Angehängte Dateien:
-

10V.jpg
66 KB -

11V_Netzteil.jpg
70 KB -

20V.jpg
71 KB
Microschrittbetrieb? Dann könnte dir der "drv8825 decay hack" helfen.
Hast du den Motor eingebaut? Wenn die unbelastet auf dem Tisch rumliegen zucken die bei Nennstrom wild hin und her.
Servus, > Der Schrittmotor soll mit ca. 30V betrieben werden um ein ausreichendes > Moment zu erhalten. Du meinst eher eine höhere Geschwindigkeit erreichen. Drehmoment stellst du mit den Poti ein. Deine Ozsi Bilder sind nicht hinreichend. Du müssest die sin/cos Verläufe am Shunt begutachten. > - Raspberry Pi und externer Frequenzgenerator geben den Takt für den > Stepeingang am Schrittmotorcontroller Was hast du überhaupt vor? Wieso externer Frequenzgenerator? Willst du den Stepper als Gleichstrommotor nutzen? Mit den drv8825 habe ich keine gute Erfahrungen gemacht. Beim Löten (drv8825 hack) habe ich schon 2 stk gefetzt. Weitherhin besteht eine Abhängigkeit der Spannungsquelle und der Induktivität des Motors. Bei 24V heult der Motor und bei 12V widerum nicht... mfg
Julia schrieb: > Die angehängten Schriebe des Oszilloskops zeigen die Stepfrequenz (gelb) > und einen der vier Spulenausgänge (blau) für 10V, 11V und 20V. Mit diesen Graphen kann ich so ziemlich nix anfangen, das einzige. was ich erkennen kann, ist eine unterschiedliche Periodendauer beim Step Signal, alles andere müsste ich raten. Julia schrieb: > - Controller: DRV8825 (8-45V, max. 2,5A) > - Schrittmotor: Nanotec ST6018L3008 (Anschluss: Bipolar/Seriell) Den genannten Motor kenne ich nicht, ST60 heißt vermutlich 60mm Kantenlänge und somit > Nema14 und folglich andere Stromkategorie. Ich fürchte, da ist der DRV8825 nicht der richtige Treiber, um das gewünschte Moment zu liefern. Ich nutze diese selbst bei 24V und < 1A, da funzen sie prima. Welchen Strom hast Du eingestellt? 2,5 A sind illusorisch, bei >1,2A brauchst Du ein Peltier-Element zur Kühlung, da die Stepsticks (unterstellt) kühltechnisch komplett falsch konstruiert sind. Mit aufgeklebtem KK plus Lüftung bekommst Du max. knapp 2A. Julia schrieb: > Daher habe ich ein Netzteil mit verstellbarer > Spannung besorgt. ??? Die DRV benötigen eine saubere spikefreie Spannung, ist das sicher?? Zur Abmilderung des üblichen Schmutzes wird üblicherweise ein Elko mit hohem ESR direkt an die Versorgungspinne gelötet. Die Erfahrung zeigt, dass sie mit handelsüblichen 24V Lichtnetzteilen gut harmonieren, bei schlechten Exemplaren aber zu sonderbaren Reaktionen neigen.
bianchifan schrieb: > Zur Abmilderung des üblichen Schmutzes wird üblicherweise ein Elko mit > hohem ESR direkt an die Versorgungspinne gelötet. Du meinst wohl "niedrigen" ESR.
Hallo Julia, spricht vieleicht die Strombegrenzung des Netzteil an? Kleinere Spannung weniger Strom (maximaler eingestellte Strom nicht erreicht), höhere Spannung schneller an der Regelgrenze des IC. mfg. Holger
Julia schrieb: > Was ist da los? Spannungsmodulation für Mikroschrittbetrieb, völlig in Ordnung. Fast. Denn es scheint bei 10 und 11V ein 1/5 und bei 20V ein 1/10 Mikroschritt zu sein, den kann man aber gar nict einstellen. Du solltest a) nicht bloss einen Ausgang messen, sondern die Spannung über einer Spule (Differenzbildung weil GND vermutlich nicht mit einem Chopperausgang verbunden werden kann ohne Störungen) und b) filtern (RC-Kombination, die die Chopperfrequenz wegfiltert und den Mittelwert übrig lässt). c) warum ist es /5 bzw. /10 ?
bianchifan schrieb: > Welchen Strom hast Du eingestellt? > 2,5 A sind illusorisch, bei >1,2A brauchst Du ein Peltier-Element zur > Kühlung, da die Stepsticks (unterstellt) kühltechnisch komplett falsch > konstruiert sind. > Mit aufgeklebtem KK plus Lüftung bekommst Du max. knapp 2A. >> Beitrag "Re: Getriebemotor mit 1 U/min"
Vielen Dank für die vielen Antworten. Hier ein paar Antworten auf eure Fragen. Noch einer schrieb: > Hast du den Motor eingebaut? Wenn die unbelastet auf dem Tisch rumliegen > zucken die bei Nennstrom wild hin und her. Das Phänomen tritt in beiden Fällen auf. aSma>> schrieb: > Du meinst eher eine höhere Geschwindigkeit erreichen. Drehmoment stellst > du mit den Poti ein. Es handelt sich um einen Schrittmotor. Mit höherer Spannung habe ich auch bei größeren Drehzahlen das Nennmoment. bianchifan schrieb: > Mit diesen Graphen kann ich so ziemlich nix anfangen, das einzige. was > ich erkennen kann, ist eine unterschiedliche Periodendauer beim Step > Signal, alles andere müsste ich raten. Die Periodendauer des Stepsignals ist mit 62-63 Hz ziemlich konstant. Die Periode beim Spulenausgang ist bei 10V reletiv ok, bei 20V völlig daneben, wie man leicht sieht. bianchifan schrieb: > Den genannten Motor kenne ich nicht, ST60 heißt vermutlich 60mm > Kantenlänge und somit > Nema14 und folglich andere Stromkategorie. Stromstärke 2,12 A bianchifan schrieb: > Welchen Strom hast Du eingestellt? > 2,5 A sind illusorisch, bei >1,2A brauchst Du ein Peltier-Element zur > Kühlung, da die Stepsticks (unterstellt) kühltechnisch komplett falsch > konstruiert sind. > Mit aufgeklebtem KK plus Lüftung bekommst Du max. knapp 2A. Die Kühlung funktioniert hervorragend. bianchifan schrieb: > Die DRV benötigen eine saubere spikefreie Spannung, ist das sicher?? Ja Holger schrieb: > spricht vieleicht die Strombegrenzung des Netzteil an? Nein
Julia schrieb: > Es handelt sich um einen Schrittmotor. Mit höherer Spannung habe ich > auch bei größeren Drehzahlen das Nennmoment. Das ist sowas von falsch! Das Moment ist proportional zum Strom. Die Induktivität bremst den Stromanstieg. Mit höherer Spannung kann eine höhere Geschwindigkeiten erreicht werden. Außerdem ist ein Schrittmotor ein Reluktanzmotor. Das maximale Drehmoment hat man im Stillstand. > Die Periodendauer des Stepsignals ist mit 62-63 Hz ziemlich konstant. > Die Periode beim Spulenausgang ist bei 10V reletiv ok, bei 20V völlig > daneben, wie man leicht sieht. Hier müssen wir jetzt klären, ob du überhaupt eine höhere Spannung brauchst oder eher einen anderen Treiber, bzw. du solltest mal den "DRV8825 Hack" durchführen! Das müsste dein Problem lösen. > Stromstärke 2,12 A > Die Kühlung funktioniert hervorragend. Wenn dein Treiber richtig laufen würde, dann würde er 100% heiß werden. 1. Du hast ja einen Oszi, dann gucke dir die Spannung am Sense Widerstand (Shunt) an. 2. Mache ein Bild vom Aufbau. mfg
aSma>> schrieb: > Julia schrieb: >> Es handelt sich um einen Schrittmotor. Mit höherer Spannung habe ich >> auch bei größeren Drehzahlen das Nennmoment. > > Das ist sowas von falsch! Das Moment ist proportional zum Strom. Die > Induktivität bremst den Stromanstieg. Mit höherer Spannung kann eine > höhere Geschwindigkeiten erreicht werden. Denk mal lieber nach beim Lesen, statt sofort falsch zu schreien, weil du die Formulierung nicht raffst. Durch die höhere Spannung fällt das Drehmoment nicht mehr so stark mit der Drehzahl ab. aSma>> schrieb: > Außerdem ist ein Schrittmotor ein Reluktanzmotor. Das hingegen halte ich für ein Gerücht, moderne Schrittmotoren werden meistens als Hybridmotor konstruiert und sind damit permanenterregte Motoren!
:
Bearbeitet durch User
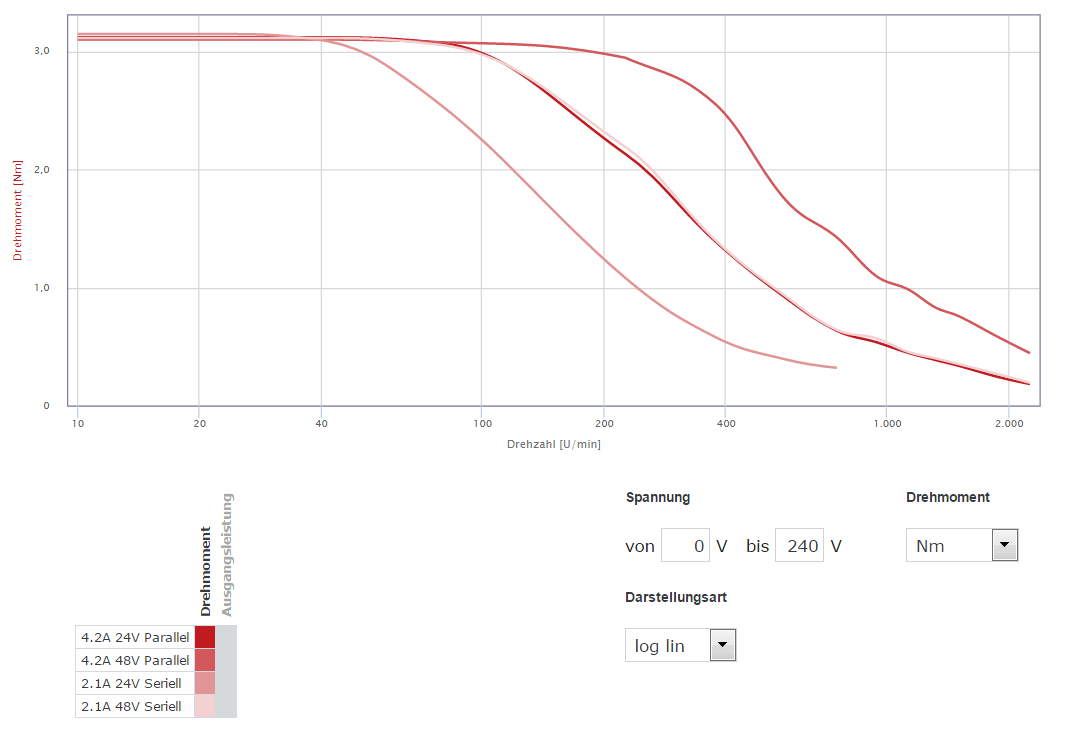
Jan H. schrieb: > Hybridmotor ??? aSma>> schrieb: > Außerdem ist ein Schrittmotor > ein Reluktanzmotor Auch das scheint mir falsch zu sein....
Angehängte Dateien:
-

Unbenannt.PNG
29 KB

aSma>> schrieb: > Julia schrieb: >> Es handelt sich um einen Schrittmotor. Mit höherer Spannung habe ich >> auch bei größeren Drehzahlen das Nennmoment. > > Das ist sowas von falsch! Das Moment ist proportional zum Strom. Die > Induktivität bremst den Stromanstieg. Mit höherer Spannung kann eine > höhere Geschwindigkeiten erreicht werden. Außerdem ist ein Schrittmotor > ein Reluktanzmotor. Das maximale Drehmoment hat man im Stillstand. 1. Das heißt: "sowatt an falsch". 2. Siehe Anhang aSma>> schrieb: > Wenn dein Treiber richtig laufen würde, dann würde er 100% heiß werden. Ja. Der Treiber wird richtig heiß und zwar in kürzester Zeit. Darum wird er von einem Alublock gekühlt. (Es besteht keine elektrische Verbindung zwischen Alublock und Controller, falls mich jemand für eingeschränkt hält.)
Julia schrieb: > Die Kühlung funktioniert hervorragend. Das bezweifel ich, wenn dem DRV zu heiß wird, schaltet er kurzerhand ab, auch für Sekundenbruchteile. Julia schrieb: > Die Periode beim Spulenausgang ist bei 10V reletiv ok, bei 20V völlig > daneben, wie man leicht sieht. Für mich sehe alle Oszillogramme daneben aus... Julia schrieb: > Ich verwende den Treiber im Fullstep mode Damit kenne ich mich nicht aus, ich betreibe sie im 1/32-Modus, testweise hatte ich seinerzeit mal mit 1/16 rumgespielt. Grundsätzlich läuft die Stromeinstellung über einen Chopper, mit der Frequnz bin ich überfragt, ist zu lange her. Bei Fullstep sollte da eigentlich der eingestellte Strom / srt2 rauskommen, also pi mal Daumen 0,7 vom eingestellten Strom. Im "Mikroschrittbetrieb"!! wird bei jeder positiven Flanke die nächste Stromstufe initiiert, bei Fullstep müsste die Bestromung jeweils für zwei Takte aufrecht erhalten werden. Beim 10V pic sieht man aber heftige Zuckungen bereits auf der zweiten abfallenden Flanke. Eventuell wird der Treiber auch durch die Gegen-EMK aus dem Tritt gebracht, in der stromlosen Phase gehört da jedenfalls nix hin. Bei 20V ist der Treiber jedenfalls völlig aus dem Tritt und reagiert erst bei der vierten positiven Flanke. Ich tippe auf die Spannungsversorgung bzw. Stromquelle. Julia schrieb: > Stromstärke 2,12 A Bei solchen Werten rate ich zu anderen Treibern, TBS6irgendwas, weiß ich grad nicht auswendig.
Angehängte Dateien:
-

PICT9286.JPG
160 KB -

PICT9293.JPG
200 KB
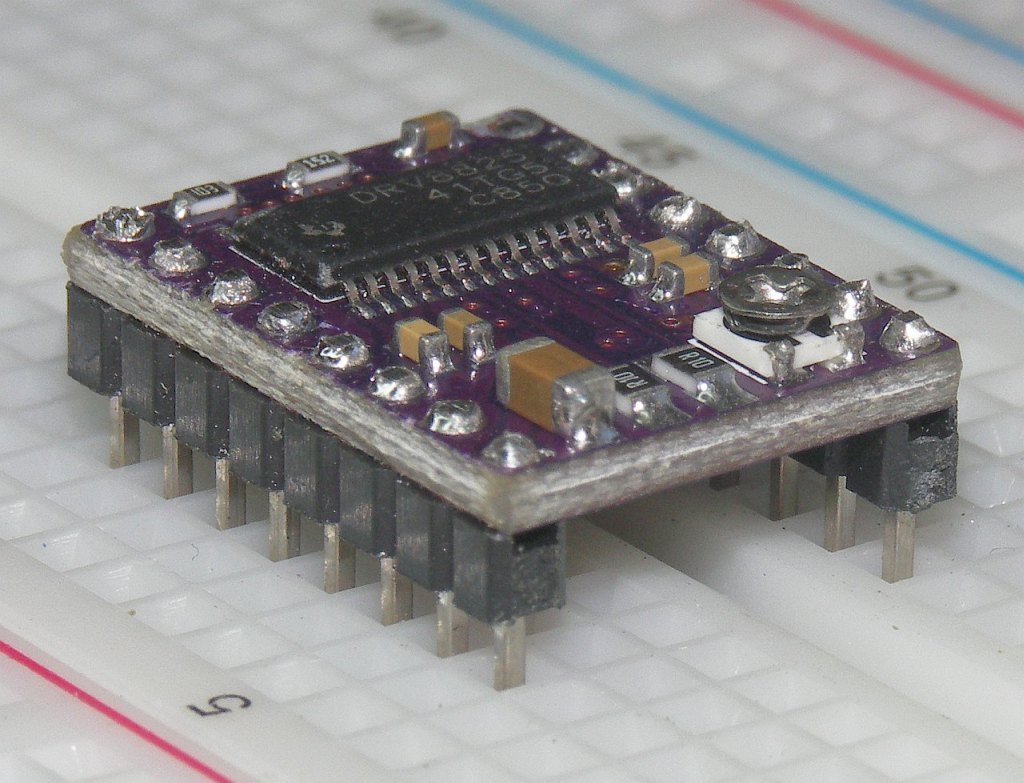

Julia schrieb: > 2. Siehe Anhang do lecks mi doch.... lese ich richtig, 3Nm?? Was ist das für ein Motor? Mit dem DRV betreibe ich Nema17 mit maximal 70 Ncm, nur mal so ganz nebenbei. Die Lötpinne sind abgefeilt, um einen ausladenderen KK drauf zu bekommen. Ab falschen PCB-Design ändert das gar nix, der DRV müsste von der Unterseite her gekühlt werden.
THB6128 - 2A, geeignet für Nema17/23 http://www.dx.com/p/thb6128-driver-for-24-28-39-42-stepper-motor-265110 THB7128 - 3A, geeignet für Nema23 http://www.gearbest.com/development-boards/pp_138621.html
U. F. schrieb: > Jan H. schrieb: >> Hybridmotor > ??? Das ist der Name der Bauform mit Permanenterregung, aber den Zahnkränzen eines Reluktanzmotors. Ist ein Permanentmagnet drin, an dessen Ende Zahnkränze sind, die um einen halben Zahn gegeneinander versetzt sind. Daher kommen die kleinen Schrittwinkel
Da die Kühlung funktioniert und das Prinzip eines Schrittmotors nun geklärt sein sollte, zurück zum Thema. Decay Hack ausprobiert. Tatsächlich dreht sich der Motor jetzt, allerdings in super kleinen Schritten und damit sehr sehr langsam. Am Spulenausgang finde ich jetzt ein Rechtecksignal mit ca. 15 kHz, während weiterhin ca. 63 Hz am Stepeingang anliegt.
Julia schrieb: > Decay Hack ausprobiert. Tatsächlich dreht sich der Motor jetzt, > allerdings in super kleinen Schritten und damit sehr sehr langsam. Was erwartest Du? Die 15kHz riechen nach Chopperfrequenz, bei 63Hz dreht der Motor langsam. Bei einem Drehwinkel von 1,8° (200 Schritte) braucht er ca. 3,3sec für 1 Umdrehung, bei 0,9°/400 das doppelte. Sollte er noch langsamer sein, wird er mikrobeschrittet.
Angehängte Dateien:
-

20V__ST6018L3008.BMP
1,1 MB
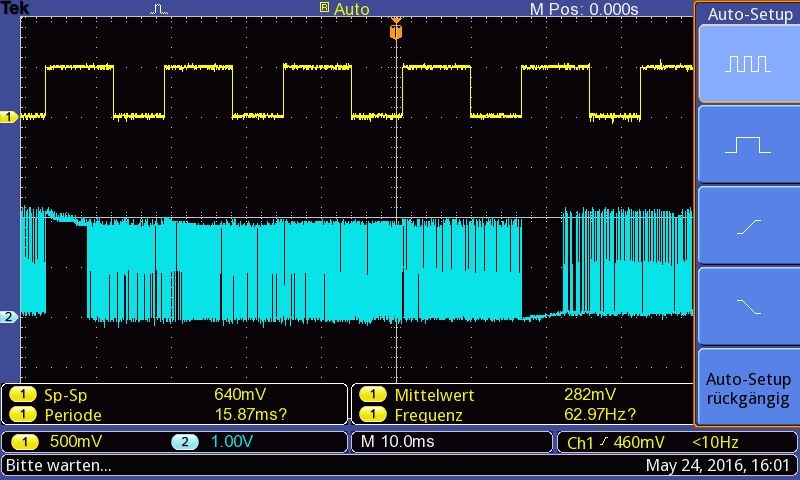
Einen schönen guten Tag, ich habe meinen Motor abgeklemmt. Das Signal auf dem Oszilloskop bei 20V Eingangsspannung sieht sehr gut aus, im Gegensatz zu dem mit Motor. Man sieht, wie die Spulenspannung (blau) am nicht belegten Ausgang des Controllers in Abhängigkeit der Stepfrequenz (gelb) getaktet ist. Im Gegensatz steht der Graph mit angeklemmten Motor. Hier liegt nun ein sehr hoher Takt an. Zoomt man rein, erkennt man ein hochfrequentes Rechtecksignal. Was kann es noch sein? Auszuschließende Probleme: 1. der Strom ist eingestellt, wie vom Hersteller empfohlen (1,1A pro Phase im Haltemodus) 2. keine Abschaltung durch zu hohen Strom oder zu hohe Temperatur (dann würde der Controller abschalten und abgeschaltet bleiben) 3. Decay Hack bringt wenig Besserung 4. Kondensator zwischen V_in und Gnd am Controller bringt keine messbare Änderung 5. Motor ist auch parallel angeschlossen worden, um die Impedanz zu verringern.
Angehängte Dateien:

{kind=link}
Hier auch das Oszillogramm mit 20V und ohne angeschlossenem Motor :)
Was erwartest du soll die Stromregelungschopper machen, wenn keine induktive Last angeschlossen ist ? Da kann er nur voll durchschalten, der Strom steigt nie auf Nennwert. Immerhin ist das Bild nun synchron zum Step-Takt. Es ist völlig normal, daß der Ausgang immer hin und her wechselt wenn der neennstrom erreicht wird, und das ist um so eher der Fall, je höher die Spannung ist. Ganz so, wie deine ersten Bilder zeigen. An denen ist nichts wirklich verkehrt ausser der merkwürdigen Verschiebung zwischen step takt und Stromminima. Wahrscheinlich taktest du bloss deinen Motor zu shnell und ohne Anfahrrame und ohne Breemsresonatorplatte und der Motor kann dem Takt nicht folgen und steigt aus. Grundlagen uz Schrittmotoren, lest vorher Grundlagen zu Schrittmotoren. http://www.dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10 (da steht das mit dem Chopper auch nicht wirklich drin).
Michael B. schrieb: > Wahrscheinlich taktest du bloss deinen Motor zu shnell und ohne > Anfahrrame und ohne Breemsresonatorplatte und der Motor kann dem Takt > nicht folgen und steigt aus. Benötige ich denn bei Drhezahlen von 60 U/s so etwas?
Julia schrieb: > Benötige ich denn bei Drhezahlen von 60 U/s so etwas? meinst bestimmt 60 U/min. Grundsätzlich sollte man Vollschritt meiden. Wenn schon, dann muss die Spannung angepasst werden, wie du siehst. Oder man verwendet anderen, komplexeren Treiber.
Michael B. schrieb: > Wahrscheinlich taktest du bloss deinen Motor zu shnell und ohne > Anfahrrame und ohne Breemsresonatorplatte und der Motor kann dem Takt > nicht folgen und steigt aus. ??? Vielleich steh ich ja gewaltig auf'm Schauch, aber war da nicht die Rede von 63 Hz? Julia schrieb: > Hier auch das Oszillogramm mit 20V und ohne angeschlossenem Motor > :) Schön, der Motor wird also tatsächlich vollschrittig angesteuert. Und nach Anklemmen des Motors geht die Geschichte in die Binsen, auch bei 1,1A. Da meine Vollschrittversuche zu meinen ersten Schrittmotorgehversuchen gehören und Jahrzehnte zurückliegen, kann ich da momentan nicht weiterhelfen, ich hatte damals noch kein Osci.
Tany schrieb: > Grundsätzlich sollte man Vollschritt meiden. > Wenn schon, dann muss die Spannung angepasst werden, wie du siehst. > Oder man verwendet anderen, komplexeren Treiber. Ganz genau, wenn man die Möglichkeit hat feinere Schritte zu nutzen, tut man gut daran dies zu tun! Der große Vorteil liegt eben am feineneren Anfahren, der Unterschied zwischen dem Vorgegebenen Winkel und dem tatsächlichen wird nicht so groß! Vor allem zwischen 1. und 2. Schritt! Die Welle beschleunigt aus dem Stand, und der zweite Schritt haut rein wenn der 1. Vorgabewinkel noch gar nicht erreicht ist. Das verzeiht der Schrittmotor kaum. Meine ersten Erfahrungen mit Schrittmotoren haben gezeigt dass eine Rampe immer gut tut. Außer der Schrittmotor & Treiber ist sehr mächtig, dann schafft man es durch die schiere Gewalt. Aber wenn man mal mit kleinen Schrittmotoren herumgespielt hat, mit Konstantspannung, wird das sehr deutlich. Geschwindigkeiten die Problemlos gehalten werden konnten ließen sich nur langsam anfahren!
Hallo Michael, >> Was ist da los? > > Spannungsmodulation für Mikroschrittbetrieb, völlig in Ordnung. > > Fast. > > Denn es scheint bei 10 und 11V ein 1/5 und bei 20V ein 1/10 Mikroschritt > zu sein, den kann man aber gar nict einstellen. Wie kommst du auf 1/5 bzw. 1/10? Ich sehe da jeweils vier Vollschritte auf eine elektrische Umdrehung, passt also zu den Angaben im Thread. Lediglich bei 20V scheint auf 1/2-Schritt umgestellt worden zu sein, weil die Wicklung erst nach 4 Schritten umgepolt wird. Man sieht hier sehr schön, dass der Treiber bei 10V kaum in den Konstantstrom-Betrieb kommt. Der Chopper wird erst bei höheren Spannungen richtig aktiv. Genau so, wie es der Theorie nach sein sollte. Mit freundlichen Grüßen Thorsten Ostermann
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.