Hallo erstmal, Mein erster Post hier und gleich ein Problem ... wer hätte es gedacht Wie aus dem Titel hoffentlich ersichtlich habe ich ein Problem mit meinem selbst entwickelten Motor Controller. Motor dreht sich wunderbar, µc und Software funktionieren auch so weit wie gewünscht nur ab und an geht einer der high side fets kaput. Das Problem ist jetzt das ich keine ahnung habe wieso. Die saftleitungen sind alle ausreichend (meines erachtens) mit Keramikkondensatoren und elkos entkoppelt und eine Z-Diode am gate ist nebst Vorwiderstand auch vorhanden. Wenn es hilft stelle ich den Schaltplan mal rein vlt. gestaltet sich die Diagnose dann leichter. Die Eckdaten des Motors sind 50V 20A bei ca. 500Upm Die verwendeten Fets sind irfb3806 insgesamt 6 stück Treiber sind ir2112 Ich bedanke mich schonmal im voraus für tipps und hinweise.
:
Verschoben durch Admin
Tobias F. schrieb: > nur ab und an geht einer der high side fets kaput. Das > Problem ist jetzt das ich keine ahnung habe wieso 50V + 10V UGS = 60V absolute maximum rating ?
zugegeben etwas knapp aber vielleicht noch erähnenswert ist das der controller bis jetzt nur mit 30v lief und wenn das problem da schon auftritt wollte ich noch keinen dicken akku drannhängen sondern habe mich auf ein netzteil mit strombegrenzung verlassen (zum glück).
Dead-Time nicht beachtet? Welcher Controller erzeugt mit welchem Programm die Steuersignale für welche Schaltung? Butter bei die Fische!
Angehängte Dateien:
-

Leistungsteil.png
11 KB
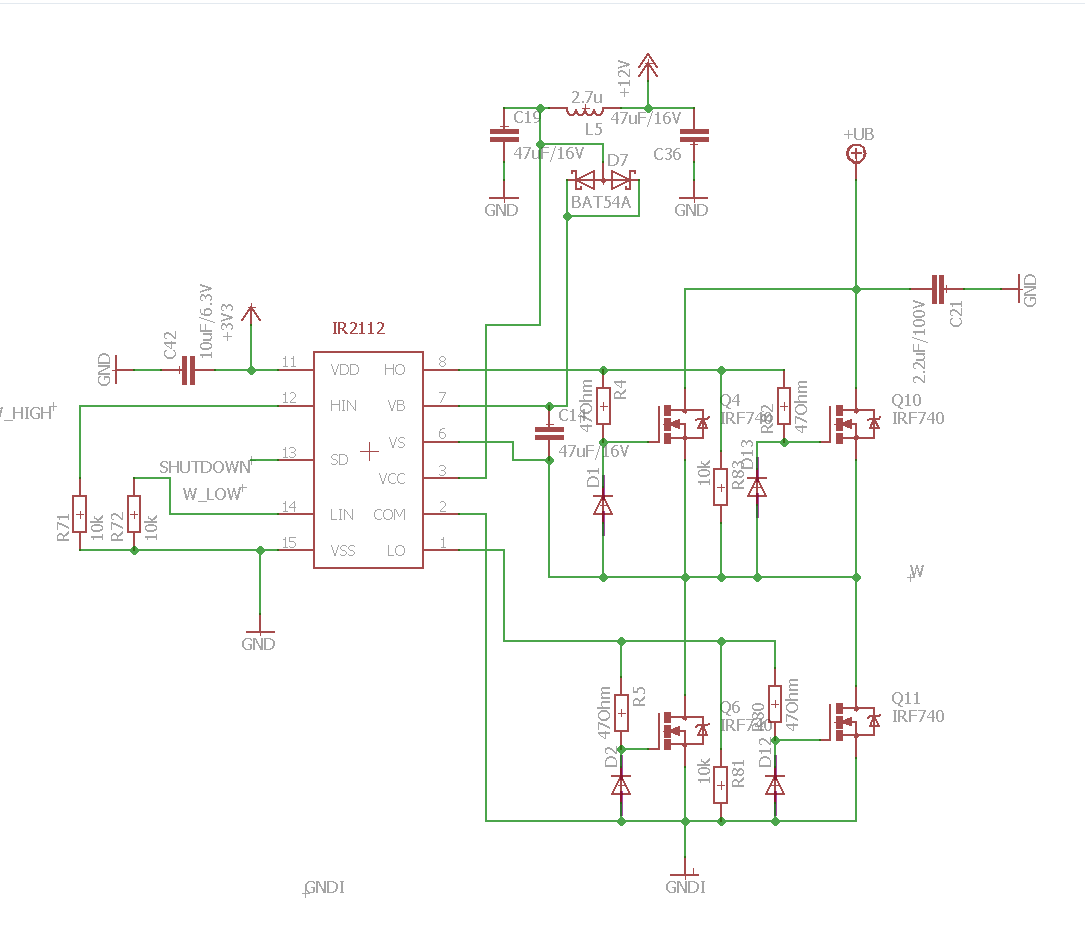
Deadtime ist beachtet worden(in software). µc ist ein MSP430f5529. Programm ist selbst geschrieben, da es ein bldc motor mit hallsensoren ist hält sich der Aufwand in Grenzen. Im Anhang ein bild in dem eine der 3 halbbrücken zu sehen ist. (noch zu erwähnen das auf der Platine eine andere Bootstrap Diode verbaut wurde)
Tobias F. schrieb: > Wenn es hilft stelle ich den Schaltplan mal rein Das hilft nie und auch Bilder vom Aufbau schaden eher ... der Glaskugel.
Angehängte Dateien:
-

pcb.png
74 KB
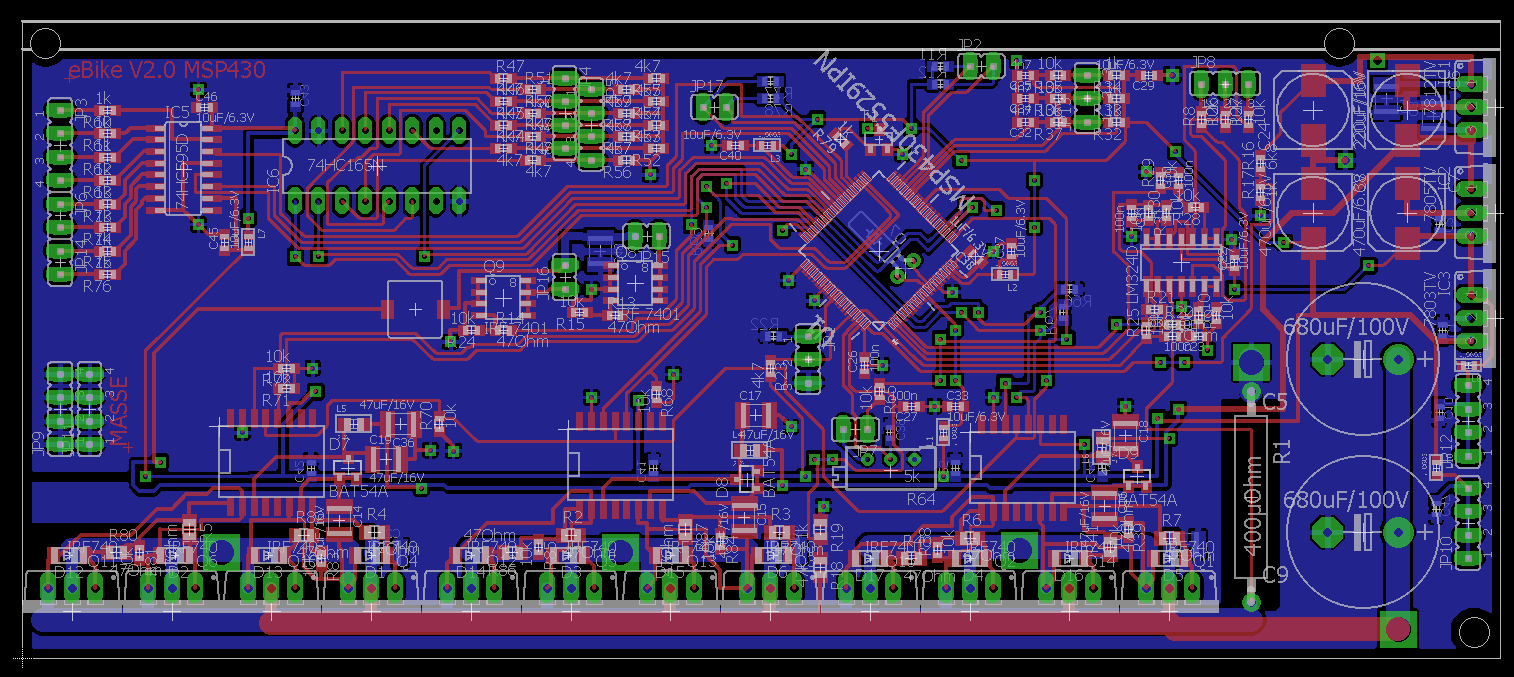
Hier ein Bild von der Platine, ich hoffe man kann alles erkennen. Bestückt wurden wie gesagt erstmal nur 6 von max 12 fets um zu testen obs geht. Wenns noch an Infos für die Diagnose mangelt ists kein Problem. Danke schonmal im vorraus
Der IR2112 ist so ziemlich der schwächste Treiber, denn es bei IR/Infineon gibt und mit den hohen Gatewiderständen wird die Umladerei der MOSFet nicht besser. Das sollte alles viel niederomiger werden, um die MOSFet so kurz wie möglich im linearen Bereich zu betreiben. Also IR2110 rein und Gatewiderstände mit 12-18 Ohm. Die Pulldowns am HIN und LIN des IR sind unnötig, da die schon im Chip drin sind. Um ein wenig Luft nach oben zu haben - der IRFB3207 mit 75V max. und seinem hohem möglichen Strom ist da deutlich robuster als der kleine IRFB3806. Das Layout ist ungünstig, besser ist es, zwischen die Endstufen einen Reservoir Elko unterzubringen.
Das is doch schonmal mal was danke für die Tipps. Die schwachen treiber habe ich zusammen mit den hohen gatewiderständen genommen um die fets eben langsamer zu schalten und somit emv problemen aus dem weg zu gehen.Das mehr an Verlustleistung ist bei der anwendung egal. zugegen en paar Elkos auf der langen Platine nahe der Fets wären gut merk ich mir für die nächste Platine. Aber ist es wirklich notwedig die fets derart schnell zu schalten ? Welche zeit sollte ich für das umladen den als maximalwert betrachten ? MfG Tobias
Tobias F. schrieb: > Die schwachen treiber habe ich zusammen mit den hohen gatewiderständen > genommen um die fets eben langsamer zu schalten und somit emv problemen > aus dem weg zu gehen.Das mehr an Verlustleistung ist bei der anwendung > egal. > Aber ist es wirklich notwedig die fets derart schnell zu schalten ? Nein, langsam kann völlig in Ordnugn oder sogar notwendig sein, da ja die Spannungssteilheit (z.B. 100V/us nach dem Treiber) noch durch die MOSFETs verstärkt wird (z.B. 1000V/us). Es gibt aber halt einige Leute, die immer glauben, mehr wäre besser, und sich damit jede Menge Problem einhandeln (oder dem, den sie "beraten"). Irgendwie würde es mich bei dem Layout nicht wundern, wenn es die MOSFETs am linken Ende wären, die kapuitt gehen. Die Masse-'Fläche' ist weitgehend zerschnitten aber immerhin die Leiterbahnführung sternförmig.
Irgendwie würde es mich nicht wundern wenn der linke fet stirbt : Da muss ich dich leider entäuschen die zuletzt gestorbene ist der ganz rechts ... Der der keinen Kerko an drain hat Ist eine umladezeit von 1us noch im Rahmen oder zu hoch bzw geht da auch noch mehr ohne das der fet stirbt ... Wie gesagt Kühlung is kein problem
Tobias F. schrieb: > Da muss ich dich leider entäuschen die zuletzt gestorbene ist der ganz > rechts Dann würde ich auch auf cross conduction tippen, rechts ist die Versorgung am stärksten.
Eine entsprechende deadtime wird mit Software generiert und wurde ebenfalls nachgemessen. Ich wüste nicht wie der da durch sterben soll. Vlt noch eine hilfreiche info die fets sind immer bei einem Strom von ca. 10A und dutycyle von über 50% gestorben. Wie schon gefragt kann ich die fets auch langsamer umladen als 1us ? Danke für den hilfreichen input
Hallo Tobias F. schrieb: > (noch zu erwähnen das auf der Platine eine andere Bootstrap Diode > verbaut wurde) Dir ist schon klar, dass die Bootstrapdiode mehr als nur die 12V sperren können muss? Der Bootstrapkondensator erscheint mir etwas zu groß, zumal er im Wesentlichen von C1 geladen werden muss (wg. L5). Ich würde ihn auf 1/10 C1 reduzieren. Die Gatewiderstände erscheinen mir auch eine Größenordnung zu hoch, auch wenn ich Deine PWM-Frequenz nicht kenne. Zwischen den drei Halbbrücken würde ich den Zwischenkreis noch mit Folienkondensatoren stützen. Die Zwischenkreiselkos würde ich an beiden Enden der Zwischenkreissammelschine anordnen.
Die Diode kann max 85V sperren daran hab ich schon gedacht ;) Bootstrapkondensator hab ich so groß gewählt das in jedem fall noch Ladung da ist auch wenn der motor längere zeit steht (klar ich kann auch sobald der motor steht alle low side fets durchschalten) aber sobald der kondensator erstmal geladen ist sollte das doch eig. keine probleme machen ? PWM frequenz ist 20khz. wie schon gesagt Gatewiderstand hoch damit ich keine emv probleme bekomme. An Überhitzung durch zu hohe Schaltverluste sind die mosfets mit Sicherheit nicht gestorben der Kühlkörper ist immer nur handwarm geworden. Wenn ich jetzt den Gatewiderstand runtersetze schalten die fets schneller, erstmal gut bleiben sie noch kälter aber meine emv probleme werden nicht besser und durch irgendwas müssen die ja kaputtgegangen sein. Das mit den kondensatoren zwischen die endstufen und am ist notoiert für die nächste version der Platine.
Hallo, Tobias F. schrieb: > Bootstrapkondensator hab ich so groß gewählt das in jedem fall noch > Ladung da ist auch wenn der motor längere zeit steht (klar ich kann auch > sobald der motor steht alle low side fets durchschalten) aber sobald der > kondensator erstmal geladen ist sollte das doch eig. keine probleme > machen ? Dann würde ich aber C5 deutlich größer machen als den Bootstrapkondensator. > PWM frequenz ist 20khz. OK. > wie schon gesagt Gatewiderstand hoch damit ich > keine emv probleme bekomme. > (...) Wenn ich jetzt den Gatewiderstand runtersetze > schalten die fets schneller, erstmal gut bleiben sie noch kälter aber > meine emv probleme werden nicht besser Hast Du denn konkrete EMV-Probleme? > und durch irgendwas müssen die ja > kaputtgegangen sein. Mit 60V sind die FETs m.E. etwas zu knapp dimensioniert für einen 50V-Motor. Aber wenn nur die High-Side-FETs sterben, vermute ich eher ein Problem mit der Ansteuerung. Wie sieht das PWM-Signal aus, welche FETs werden wie moduliert? Ein kompletter Schaltplan wäre hilfreich, da ich jetzt nur sehr wenig Lust habe, jedes Detail einzeln klären zu lassen... > Das mit den kondensatoren zwischen die endstufen und am ist notoiert für > die nächste version der Platine. Was sind den die im Schaltplan mit C21 bezeichneten Kondensatoren mit 2u2? Die Bauteile im Schaltplan sollten m.E. die selben Werte aufweisen, wie das Layout, sonst verwirrt das mehr als es hilft :-( Grüßle, Volker.
Zu C21: 2.2µF 100V Keramik auf der unterseite der Platine direkt am mosfet (schlecht zu sehen einfach mal drauf achten beim layout den ganz links erkennt man am besten) Bootstrapschaltung wird überarbeitet besten dank Die lowsidefets werden je nach Rotorlage eingeschaltet und der entsprechende Highside fet macht das pwm. Schaltung ist ziemlich simpel der eingang zum treiber kommt direkt vom MSP430, dieser gibt die Kommutiereung und Dutycycle vor. Wie gesagt ohne Last läuft alles nix ruckelt oder zickt rum, läuft wie geschmiert. Nur unter Last Sterben die fets >10A eingangsstrom(nicht Phasenstrom) Die Schaltung lief wie schon geschrieben erst mit 35V aus nem Netzteil sodass immer nur ein highside fet hops ging und der Strombegrenzer vom Netzteil größeren schaden verhindert hat.
Hallo, Tobias F. schrieb: > Zu C21: > 2.2µF 100V Keramik auf der unterseite der Platine direkt am mosfet > (schlecht zu sehen einfach mal drauf achten beim layout den ganz links > erkennt man am besten) Sehr gut. Dann kannst Du Dir die in meinem ersten Posting erwähnten Folienkondensatoren sparen. > Die lowsidefets werden je nach Rotorlage eingeschaltet und der > entsprechende Highside fet macht das pwm. Das ist Dein Problem: Die Bootstrapkondensatoren können nur nachgeladen werden, wenn der Low-Side-FET leitet. Die High-Side-FETs kommen schlicht und ergreifend in den linearen Betrieb und sterben schneller als Du die Erwärmung spüren kannst. Zwar würde das Nachladen wohl auch funktionieren, wenn die Low-Side-Freilaufdiode leitet, aber dann darf der Laststrom nicht lücken. Du solltest jede Halbbrücke komplementär pulsweitenmoduleren. Dabei auf die Totzeit achten. Bessere Mikrocontroller haben einen Totzeitgenerator dafür. Ansonsten kann man sich auch mit zwei synchronen PWM-Kanälen behelfen. > Wie gesagt ohne Last läuft alles nix ruckelt oder zickt rum, läuft wie > geschmiert. Nur unter Last Sterben die fets >10A eingangsstrom(nicht > Phasenstrom) Tja, bei I=0 macht der lineare Betrieb den FETs auch kein Problem :-/ > Die Schaltung lief wie schon geschrieben erst mit 35V aus nem Netzteil > sodass immer nur ein highside fet hops ging und der Strombegrenzer vom > Netzteil größeren schaden verhindert hat. Mach' doch bitte mal eine Überschlagrechnung und ermittle, wieviel Schaltvorgänge ein High-Side-FET mit dem Bootstrapkondensator (theoretisch) durchführen kann. Dann kennst Du die minimale Drehzahl Deines Motors. Wenn er langsamer dreht, sterben die High-Side-FETs. Grüßle, Volker.
:
Bearbeitet durch User
Danke erstaml für dein Engagement Das mit dem linearen bereich bzw. zu kleiner bootstrapkondensator hatte ich auch schon gedacht, ABER: wir nehmen mal an das eine phasenende des Motors wird von einem lowsidefet auf masse gezogen. das andere ende der phase bekommt 50% dutycycle vom high side fet. Wenn der highside fet abschaltet sinkt die Spannung soweit das die Bodydiode vom lowsidefet leitet ergo wird der bootstrap kondensator wieder aufgeladen. Dies passt auch zu meiner beobachtung das der motor bei STILLSTAND bis ca 90% dutycycle drehmoment liefert. Würde ein sinn machen den bootstrapkondensator um einen großen elko zu erweitern? MfG Tobias
:
Bearbeitet durch User
Tobias F. schrieb: > Danke erstaml für dein Engagement > > (...) Wenn der highside fet > abschaltet sinkt die Spannung soweit das die Bodydiode vom lowsidefet > leitet Nein, die Stranginduktivität des Motors treibt den Strom über die Freilaufdiode. > (...) ergo wird der bootstrap kondensator wieder aufgeladen. Das könnte vielleicht prinzipiell funktionieren, ich würde aber im Traum nie daran denken, so etwas aufzubauen, das wäre mir zu haarig! Unangenehmer Nebeneffekt sind die zusätzlichen Verluste im Low-Side-FET aufgrund der Schleusenspannung der Freilaufdiode, aber das erklärt Deine Probleme nicht. Lade die Bootstrpkondensatoren doch einfach mal versuchsweise dauerhaft nach, entweder über einen Impusübertrager oder über eine Ladungspumpe (ein Netzteil würde ich nicht verwenden, da dessen Kapazität gegen Erde bei jedem Schaltvorgang umgeladen werden muss) -- Versuch macht kluch :-) Grüßle, Volker
Volker B. schrieb: > Tobias F. schrieb: >> Danke erstaml für dein Engagement >> >> (...) Wenn der highside fet >> abschaltet sinkt die Spannung soweit das die Bodydiode vom lowsidefet >> leitet > > Nein, die Stranginduktivität des Motors treibt den Strom über die > Freilaufdiode. > >> (...) ergo wird der bootstrap kondensator wieder aufgeladen. > Mein ich doch durch das abschalten der induktivität geht die spannung unter gnd und der bootstrapkondensator wird geladen und die Bodydiode vom lowside fet leitet nicht Optimal aber ausreichend. also laut Rechnung ist der Spannungsverlust am Kondensator bei ca. 2upm 2v --> es müssen 2v nachgeladen werden. ich denke bei 10v ist der lineare bereich noch nicht erreicht.(laut datenblatt ist da noch viel Luft) Ausserdem im Datenblatt des Treibers steht etwas von "undervoltage lockout" da denke ich doch schon das die Spannung vom Bootstrapkondensator hoch genug bleibt ansonsten würde der Treiber einfach abschalten. Bootstrapkondensator würde ich so nachmessen --> ich nehme mir en akku und messe die spannung von dem bootstrapk. mim osci. Aber ich denke das das problem eher in der induktivität meines aufbaus liegt und die fets die spannungsspitzen der abschaltvorgänge nicht vertragen bzw nicht "repetitive avalanche rated" sind Aber zu 100% bin ich mir da nicht sicher, aber das ist die einzige vermutung die ich noch habe denn je höher der strom durch die leiterbahnen desto höher der spannungspeak beim abschalten. und laut simulation bin ich mit etwas pessimistischen Werten der induktivitäten mal ganz locker bei 150Vp die der mosfet verbraten darf die ein nicht dafür gedachter Mosfet auch nicht Überlebt. MfG Tobias
:
Bearbeitet durch User
Tobias F. schrieb: > repetitive avalanche rated Vielleicht ganz nützlich: http://www.vishay.com/docs/90160/an1005.pdf
Tobias F. schrieb: > Ausserdem im Datenblatt des Treibers steht etwas von "undervoltage > lockout" da denke ich doch schon das die Spannung vom > Bootstrapkondensator hoch genug bleibt ansonsten würde der Treiber > einfach abschalten. Prinzip Hoffnung... :-/ > Bootstrapkondensator würde ich so nachmessen --> ich nehme mir en akku > und messe die spannung von dem bootstrapk. mim osci. Vorsicht: Nur mit Differentialtastkopf, sonst knallt's. > Aber ich denke das das problem eher in der induktivität meines aufbaus > liegt und die fets die spannungsspitzen der abschaltvorgänge nicht > vertragen bzw nicht "repetitive avalanche rated" sind ...und warum sterben dann ausschließlich die High-Side-FETs? (...) > simulation bin ich mit etwas pessimistischen Werten der induktivitäten > mal ganz locker bei 150Vp die der mosfet verbraten darf die ein nicht > dafür gedachter Mosfet auch nicht Überlebt. ...trotz der 2.2uF an jeder High-Side-Drain? Das würde mich doch sehr wundern... Dann wünsche ich viel Erfolg! Nun bin ich mit meinen hellseherischen Fähigkeiten am Ende. Für weitere Ausagen müsste ich selber messen... Grüßle, Volker.
Erstmal danke dafür, das verlinkte Dokument habe ich schon studiert aber zu einem richtigen ergebnis bin ich nicht gekommen ausser das der fet mit ziemlicher Sicherheit an überspannung gestorben ist. Bzw. mir fällt nichts weiteres ein an was er kaputt gehen könnte. Aber was man dagegen tut weis ich auch nich so richtig MfG Tobias
An der Sache mit den Induktivitäten könnte was dran sein. Besonderen Augenmerk sollte man auf die Source-Leitungen legen, gibt es hier Induktions-Spannungsspitzen, belasten die den FET nicht nur auf der Source-Drain Strecke, die ja eher spannungsfest ist, sondern addieren sich auf die Gate-Source Spannung auf, und die dort einzuhaltenden 20-30V sind schnell erreicht. Überspannung auf der Gate-Source Strecke killt MOSFETs schnell und zuverlässig, ohne daß dazu viel Energie notwendig ist. Wird es unkritischer wenn Du langsamer schaltest (höhere Gate-Widerstände)? Wenn ja, sind es recht wahrscheinlich induktive Spannungsspitzen. Mit freundlichen Grüßen - Martin
Von den von mir verwendeten fets habe ich schon mehrere abgeschossen nicht nur in ner Motorsteuerung sondern in einem Schaltnetzteil haben die auch ohne Grund plötzlich Versagt obwohl das Gate auch da mit ner 15v Z-Diode abgesichert war die lösung war einfach en anderen fet und schon Funktionierte es zuverlässig. Bei der schaltung ist das gate auch mit ner 15v Z-Diode abgesichert also denke ich das da nix passiert. Andere fets will ich eh reinmachen da diese nicht Spannungsfest genug sind. Was mir noch spontan einfällt ist den Kerko direkt an die halbbrücke, nicht erst über ne massefläche und dann zurück über den shunt zum fet und dann noch mit nehm kleinen low esr elko zusätzlich stützen. Denkt ihr das würde helfen. Langsamer schalten kann ich auch. Wie schon gefragt wie langsam kann man den schalten ohne das der Mosfet schaden nimmt? MfG Tobias
Ist die Frage zu kompliziert/unverständlich gestellt oder fehlen euch weitere Infos ?
Tobias F. schrieb: > Wie schon gefragt wie langsam kann man den schalten ohne das der Mosfet > schaden nimmt? Das lässt sich pauschal nicht sagen, denn es kommt auf den Strom, die SOA des MOSFet, die Taktfrequenz und den Wärmekontakt an. Der MOSFet ist in der ansteigenden und abfallenden Flanke im linearen Bereich und wird Hotspots entwickeln, d.h. die DS Strecke wird heiss. Das geht viel zu schnell, als das ein Kühlkörper da hilft. Grundsätzlich ehrt es dich ja, das du sofort an EMV Vermeidung denkst, aber zuerst sollte die Schaltung funktionieren. Schau dir dazu bitte mal BLDC Controller der gleichen Leistungsklasse an und vor allem die Ansteuerung des MOSFet. Du wirst den MOSFet bessere Überlebenschancen geben, wenn du sie zügig durchsteuerst, denn die Dinger sind einfach nicht für linearen Betrieb gedacht. Wenn wir mal den IRF730 annehmen, der hat 700pF Gatekapazität (ohne Miller!) und bildet mit dem Widerstand von 470 Ohm einen RC-Tiefpass mit Fg ~ 480kHz, d.h., du verlangsamst die Flanke nur durch diesen Tiefpass auf (grob) 1-2µs. Wenn der MOSFet anfängt zu leiten, schlägt die Millerkapazität zu und drückt die Gatespannung nochmal runter (wird aufgeladen). Deswegen sollte dem Strom entgegenwirken.
жтампф ден троль schrieb: > Was sollen die Dioden an den Gates ? Das frage ich mich auch. Wieso macht man das nicht erstmal wie es im Datenblatt, respektive in den AN's empfohlen wird? http://www.infineon.com/dgdl/an-978.pdf?fileId=5546d462533600a40153559f7cf21200 470 Ohm als Gate Widerstand, da könnte schon der Hund begraben sein. Da stehen dann auch mal schöne Hinweise in so einer AN: As an added safety margin a resistor diode network can be added to the gate, as shown with dashed lines in Figure 28A. The purpose of this network is to further delay the turn-on, without affecting the turn-off, thereby inserting some additional dead-time. The resistor-diode network is also useful in reducing the peak of the current spike during the reverse recovery time. As explained in Ref. 2, this has an impact on power losses, as well as dv/dt and EMI.
:
Bearbeitet durch User
Matthias S. schrieb: > Schau dir dazu bitte mal > BLDC Controller der gleichen Leistungsklasse an und vor allem die > Ansteuerung des MOSFet Hab ich bereits gemacht (liegt auf dem Schreibtisch) und die Schalten um einiges langsamer als ich. 10n Kondensator von Gate auf Source an jedem Fet + 100 ohm vorwiderstand. жтампф ден троль schrieb: > Was sollen die Dioden an den Gates ? Das sind 15v Z-Dioden sodass bei einer Überspannung das Gate Heile bleibt F. F. schrieb: > 470 Ohm als Gate Widerstand, da könnte schon der Hund begraben sein. Im Schaltplan steht 47Ohm nicht 470 ... 470 ist auch etwas zu viel... MfG Tobias
Tobias F. schrieb: > Im Schaltplan steht 47Ohm nicht 470 Ja, mein Fehler, ist etwas schlecht zu lesen (unüblich zumindest). Dann sollte das eigentlich klappen. Du solltest nun mal oszillografieren, und zwar die Gateansteuerung vor allem der Highside. Am besten mit der Source der Highside als Bezugspunkt. Damit siehst du auch, ob die Ladungspumpe durch deine ungeschickte Ansteuerung zusammenbricht. Eine Sinusmodulation ist besser, wie oben schon erwähnt, mit komplementären Signalen zu erreichen. Dabei gibt es dann auch kein Problem mit der Ladungspumpe. Tobias F. schrieb: > Das sind 15v Z-Dioden sodass bei einer Überspannung das Gate Heile > bleibt Völlig unnötig. Die Gatespannung wird nie höher als Vcc des IR Treibers.
Da ich mehrmals solche Probleme schon mit BLDC oder Schrittmotor Steuerungen hatte, hier meine Tipps bezüglich sterbender MosFets: - Du brauchst unbedingt ein Oszi zum Transienten-Messen. Ohne dem kommst du nicht weit. - Du willst ein Fahrrad damit betreiben? 12s? Dann fängt der Spaß bei 12*4.2 = 50,4V an, wenn du LiPo Akkus hast. - Deine Fets sind nicht nur Schalter. Beachte, daß sie intern auch Kapazitäten haben, die bei jedem Schalten entladen werden. - Beim diesem Umschalten bekommst du kurzzeitig locker die doppelte Versorgungsspannung auf die Fets. Jedesmal also eine Ohrfeige gegen dein FEt. Der geht dann langsam aber sicher kaputt. Also würde ich schon einen 100V Fet auch als sportlich nennen. Wir hatten mal Probleme gehabt bei der Firma, wo wir mit 70V Schrittmotorsteuerungen betrieben haben, und die 100V Fets sind gestorben. Nicht Sofort, sondern erst nach einer Weile. Lösung war daß wir 150V Fets reingetan haben, und die Body Diode mit Ultra Fast Shottky Dioden gestützt haben. Danach ist nix mehr abgeraucht. - Gate Netz: Schau daß du schnell entlädst, aber bissl langsamer einschaltest. Was raucht noch ab wenn dein Fet stirbt?
Martin G. schrieb: > Also würde ich schon > einen 100V Fet Der Chinesen BLDC für einen ähnlichen Motor hat 65V Mosfets drinne und der Funktioniert diesbezüglich erste Sahne. Martin G. schrieb: > und die Body Diode > mit Ultra Fast Shottky Dioden gestützt Ich habe bis jetzt keinen einzigen BLDC Controller gesehen (hatte schon viele in der Hand) bei dem nochmal extra Dioden verbaut wurden deshalb dachte ich mir das ich die auch nicht brauche (eine kurze Simulation bestätigt diesen Eindruck). So richtig mit dem Gedanken das da noch Dioden reinmüssen kann ich mich deshalb nicht anfreunden da es ja offensichtlich auch ohne geht auch wenn das nicht optimal ist. Osci zum Messen hab ich und kann auch damit umgehen. Das hier ist ja nicht mein erstes Projekt auch wenn es vlt. danach aussieht ;) Martin G. schrieb: > 2s? Dann fängt der Spaß bei > 12*4.2 = 50,4V an, wenn du LiPo Akkus hast. 50V is der Anfang zum Testen am Ende wäre es Praktisch wenn man noch en Paar Zellen zusätzlich drannhängen kann (75V absolutes maximum). Martin G. schrieb: > Was raucht noch ab wenn dein Fet stirbt? Tobias F. schrieb: > Die Schaltung lief wie schon geschrieben erst mit 35V aus nem Netzteil > sodass immer nur ein highside fet hops ging und der Strombegrenzer vom > Netzteil größeren schaden verhindert hat. Nur ein highside auf einmal, bis jetzt sind schon zwei gestorben. Matthias S. schrieb: > Völlig unnötig. Die Gatespannung wird nie höher als Vcc des IR Treibers. OK macht Sinn ... Wäre es vlt. Sinnvoller eine Z-Diode über den Bootstrapkondensator zu machen Falls der mal zu viel Spannung hat ? Sinusmodulation ist geplannt nur muss erstmal die Blockkommutierung laufen bevor ich mit Sinus anfange. MfG Tobias
> Der Chinesen BLDC für einen ähnlichen Motor hat 65V Mosfets drinne und > der Funktioniert diesbezüglich erste Sahne. Und hast du ihre Schaltung mal studiert? Vielleicht können die da was, was uns noch nicht gelungen ist... Mal nachbauen wäre da sinnvoll. > Du solltest nun mal oszillografieren, und zwar die Gateansteuerung vor >allem der Highside. Am besten mit der Source der Highside als >Bezugspunkt. Damit siehst du auch, ob die Ladungspumpe durch deine >ungeschickte Ansteuerung zusammenbricht. Bloß nicht direkt die Oszi Erde mit dem Source der Highside verbinden! Da gäbe es gleich eine Überraschung wenn GND der Schaltung auch auf anderem Wege geerdet ist. Eher DIfferenzmessung mit 2 Tastköpfen machen.
Martin G. schrieb: > Und hast du ihre Schaltung mal studiert? Vielleicht können die da was, > was uns noch nicht gelungen ist... > Mal nachbauen wäre da sinnvoll. Je mehr ich über meine Schaltung nachdenke desto mehr gleichen sich beide an (ohne jetzt geschaut/kopiert zu haben weisen sie gewisse Ähnlichkeiten auf). Also der Leistungsteil und die Anordnung der Bypasskondensatoren ist ziemlich gleich (was soll man da auch anders machen). Ausserdem warum nachbauen wenn ich schon einen habe an dem ich Messen kann ? Ich wollte ja eben keine Kopie sondern was anderes. BTW. die Chinesen haben als Bootstrapkondensator für 3 dicke highsidefets jeweils en 47µF elko genommen ob der nochmal en kerko hat weiß ich nicht aber da "wir" auf den gleichen Wert gekommen sind gehe ich davon aus das es ausreichend ist ... Martin G. schrieb: > Bloß nicht direkt die Oszi Erde mit dem Source der Highside verbinden! > Da gäbe es gleich eine Überraschung wenn GND der Schaltung auch auf > anderem Wege geerdet ist. Eher DIfferenzmessung mit 2 Tastköpfen machen. Weiß ich doch ;) Ausser die schaltung wird aus nem akku versorgt aber Optimal ist das dann immernochnicht. Differenzmessung is da besser. Werde die Tage mal Nachmessen wie es aussieht aber ich Glaube nicht das es daran liegt. Wie schon gefragt sind die extra Dioden wirklich notwendig. Hab die bis jetzt nirgendwo gesehen. MfG Tobias
:
Bearbeitet durch User
Tobias F. schrieb: > OK macht Sinn ... Wäre es vlt. Sinnvoller eine Z-Diode über den > Bootstrapkondensator zu machen Falls der mal zu viel Spannung hat ? Ich weiss ja nicht, wie du die 12V erzeugst, aber wenn das so unzuverlässig ist, dann solltest du den Teil der Schaltung nochmal überdenken. Wichtig ist, das die 12V nicht einbrechen, denn davon hängt die gute Aussteuerung der MOSFet ab und auch die Unterspannungsabschaltung im IR2112. Tobias F. schrieb: > BTW. die Chinesen haben als Bootstrapkondensator für 3 dicke > highsidefets jeweils en 47µF elko genommen ob der nochmal en kerko hat > weiß ich nicht aber da "wir" auf den gleichen Wert gekommen sind gehe > ich davon aus das es ausreichend ist Das kann man schon machen. In meinem dicken BLDC Kontroller habe ich 100µF drin - der muss aber auch 3 IRFB3207 treiben.
:
Bearbeitet durch User
Matthias S. schrieb: > Das kann man schon machen. In meinem dicken BLDC Kontroller habe ich > 100µF drin - der muss aber auch 3 IRFB3207 treiben. Damit kannste ja die doppellösung vom Tobi gleich einfacher machen... Kürzere Leitungen etc. Parallell geschaltete Mosfets haben da manchmal auch die Neigung zum Schwingen während der Umschaltphase. Ich hab das mal geschafft, als ich zu kleine Gate Widerstände und hohe Versorgungsspannung hatte. Da kamen aus IRF540 auf einmal 400MHz Störungen raus... :D Und gesund war das auch nicht für die Mosfets
Wie gesagt werde die Tage mal die Spannung nach messen und ggf. die Schaltung ändern wenn es nich passt. Matthias S. schrieb: > Das kann man schon machen. In meinem dicken BLDC Kontroller habe ich > 100µF drin Welchen kondensatortyp hast du verbaut ? Elko kerko oder Tantal bzw. Welche kombination? Dürfte man die Verwendeten vorwiderstände erfahren ? MfG Tobias
Tobias F. schrieb: > Welchen kondensatortyp hast du verbaut ? Elko kerko oder Tantal bzw. > Welche kombination? 100µF/63V Panasonic: http://www.pollin.de/shop/dt/MTAyOTg3OTk-/Bauelemente_Bauteile/Passive_Bauelemente/Elektrolytkondensatoren/Elko_PANASONIC_EEUFR1J101_100_F_63_V.html Tobias F. schrieb: > Dürfte man die Verwendeten vorwiderstände erfahren ? 15 Ohm/0.5 W Jeder IR2110(!) treibt 3 * IRFB3207 in der Highside und 3 * IRFB3207 in der Lowside. Motor ist ein 48V/4000W BLDC mit Sensoren. Die Motorelektronik ist in Modulbauweise und kann mit AVR, XMega oder STM32F1xx angetrieben werden, da es ein Proof of Concept ist. Die grundlegende Software war mal AVR447, ist aber mittlerweile weit davon entfernt. Martin G. schrieb: > Da kamen > aus IRF540 auf einmal 400MHz Störungen raus Das alte Schlachtschiff muss man ja auch heute nicht mehr benutzen. Vermutlich bist du damals ein Opfer der o.a. Miller Kapazität geworden.
:
Bearbeitet durch User
Matthias S. schrieb: > 100µF/63V Panasonic: Wieso 63V? Wegen dem Esr ? Matthias S. schrieb: > Jeder IR2110(!) treibt 3 * IRFB3207 in der Highside und 3 * IRFB3207 in > der Lowside. Motor ist ein 48V/4000W BLDC mit Sensoren. Die > Motorelektronik ist in Modulbauweise und kann mit AVR, XMega oder > STM32F1xx angetrieben werden, da es ein Proof of Concept ist. Die > grundlegende Software war mal AVR447, ist aber mittlerweile weit davon > entfernt. Könnte man diesbezüglich mal ein Schaltplan von einer Halbbrücke als Anregung bekommen (mit Treiber wäre praktisch). Würde mich sehr freuen wenn das geht ;) Werde dann vermutlich bei der finalen Platine IRFB4110 nehmen (12stück) so habe ich noch etwas Luft wenn der Motor an 72V Läuft. Gatewiderstände und Treiber wird dann warscheinlich auch auf einen IR2110 und 10 Ohm rauslaufen. MfG Tobias
Ich Frage nochmal warum 63v und nich weniger ... Oder betreibst du den gatetreiber mit 63v ? MfG Tobias
Tobias F. schrieb: > Ich Frage nochmal warum 63v und nich weniger Damits lange hält. Tobias F. schrieb: > Könnte man diesbezüglich mal ein Schaltplan von einer Halbbrücke als > Anregung bekommen (mit Treiber wäre praktisch) Guck dir den FU an, der praktisch genauso aufgebaut ist: https://www.mikrocontroller.net/articles/3-Phasen_Frequenzumrichter_mit_AVR Hier sinds HV-MOSFet oder IGBT in der Endstufe, aber das Prinzip bleibt das gleiche.
:
Bearbeitet durch User
So verschieden ist das jetzt aber nicht von meiner Schaltung Naja ich Messe am Wochenende mal durch vlt. findet sich dann der Fehler bei mir MfG Tobias
Tobias F. schrieb: > So verschieden ist das jetzt aber nicht von meiner Schaltung Es gibt einen grossen Unterschied. Meine Software ist dokumentiert und von deiner wissen wir gar nichts. Ach und noch einen gibts - der FU funktioniert :-P Wir haben ja noch nicht mal Oszillogramme deiner Steuersignale gesehen und auch keine Totzeitmessung.
Matthias S. schrieb: > Es gibt einen grossen Unterschied. Meine Software ist dokumentiert und > von deiner wissen wir gar nichts. Ach und noch einen gibts - der FU > funktioniert :-P > Wir haben ja noch nicht mal Oszillogramme deiner Steuersignale gesehen > und auch keine Totzeitmessung. Auch wenn es so aussieht ich bin kein neuling auf dem Gebiet. Totzeit usw. habe ich schon nachgemessen gate Signale und Flankensteilheit ist auch ok. Software ist nicht das Problem sonst würde der Fet direkt sterben und nicht erst bei 10A +. Außerdem ist die mit über 1500 Zeilen etwas lang... MfG Tobias
So Leute es gibt news, Hab heute mal neue Fets Treiber und gate widerstände eingebaut. habe nun Schaltzeiten um die 200ns. Obwohl vermutet wurde das der Highside Treiber zu wenig Spannung bekommt konnte das nicht nachgemessen werden selbst wenn der Motor steht !!! also auch hier alles ok. Wenn jemand noch ne idee hat an was die fets gestorben sein könnten raus damit. werde am Sonntag mal eine Messung bei 10A+ machen vlt. geht es jetzt. MfG Tobias
Habe mir nun mal Zeit genommen alles Durchzumessen auch unter Last. Man Kann nun den Motor bei 30V und 10A festhalten ohne das ein Mosfet stirbt oder alzu warm wird. Phasenstrom war ca. 25A bei dem Test. Laut Osci sieht alles perfekt aus kaum Over/Undershoot sogut wie kein Ripple auf der Saftleitung und Bootstrapspannung ist auch genug vorhanden. Scheint also jetzt zu Funktionieren. Aber warum die Fets voher gestorben sind weiß ich nach wie vor nicht! Obwohl sie gleich schnell Umgeladen wie vorher Funktioniert es jetzt. Wenn jemand noch ne idee hat gerne hier rein schreiben. MfG Tobias
Tobias F. schrieb: > Aber warum die Fets voher gestorben sind weiß ich nach wie vor nicht! > Obwohl sie gleich schnell Umgeladen wie vorher Funktioniert es jetzt. Du hast doch selbst geschrieben: > Hab heute mal neue Fets Treiber und gate widerstände eingebaut. Wenn du es wirklich wissen willst, solltest du deinem MC mal eine Schnittstelle verpassen, einen Shunt in die Motorzuleitung legen, und mit Totzeit und PWM Frequenz spielen, während du den Strom oszillografierst. Dann kannst du auch gleich mal mit vor- und nacheilender Kommutation experimentieren, und Drehmoment und Geräusch des Motors einstellen. So zumindest habe ich damals bei dem o.a. BLDC Kontroller gearbeitet. So gut wie alle Parameter konnte man mit Hilfe eines Monitorprogrammes im MC anschauen und ändern und ins EEPROM schreiben. Jeder Motor ist anders - das habe ich bei Vergleichen zwischen den kleinen 750W und 1,5kW Motoren im Vergleich zu den dickeren gemerkt. Vor allem erstaunlich ist die Geräuschentwicklung, die sehr abhängig vom Umschaltzeitpunkt ist. Ein grosses Problem sind die Hallsensoren. Da die direkt in den Ankern verbaut sind, misst der Sensor sowohl den vorbeistreichenden Magneten Rotor als auch die Feldstärke des Ankers. Die Plausibilitätsprüfung der Sensorsignale ist vor allem bei Sinusmodulation ein richtiger Spass. So ein Effekt kann auch bei dir auftreten und zu schlagartigen 'Falschfeldern' führen, wenn die Kommutierung dumm ist (und auf jeden Sensorfehlimpuls reagiert). Als recht störunempfindlich stellte sich dann diese Eingangsschaltung für den Hallsensor heraus:
1 | +5V Speisung des Sensors |
2 | O------+ |
3 | | |
4 | --- |
5 | | | 2k2 |
6 | | | |
7 | --- |
8 | IN | Si-Di |
9 | o------+----|<|-------+---->MC |
10 | | |
11 | --- |
12 | --- 1n5 |
13 | GND | |
14 | o---------------------+----> |
Eine 1N4148 reicht für normale Schaltzeiten aus. Die Diode hält Überspannungen vom MC fern, die im Motor und den Anschlusskabeln auf die Leitungen kommen.
:
Bearbeitet durch User
Danke für die Tipps Shunt ist schon eingebaut der Strom wird vom uc gemessen und auf ein LCD übertragen zusätzlich wurde jetzt eine über Strom Abschaltung in Hardware realisiert die innerhalb von 2us die mosfets bis zu einem reset abschaltet. Tiefpassfilter an den Hall eingängen hab ich schon bei Version 1 gehabt. Zugegeben die kommutierungroutine ist nicht die hellste aber bis jetzt konnte ich keine Fehlzündungen hören oder messen. Vor / Nacheilende kommutierung ist wie auch die sinusmodulation vorgesehen dafür muss aber erstmal der block laufen. Bei einer anderen Steuerung ohne Tiefpass hörte und spürte man die Fehlzündungen deutlich aber die fets blieben heile. Das würde ich also auch ausschließen . MfG Tobias
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.