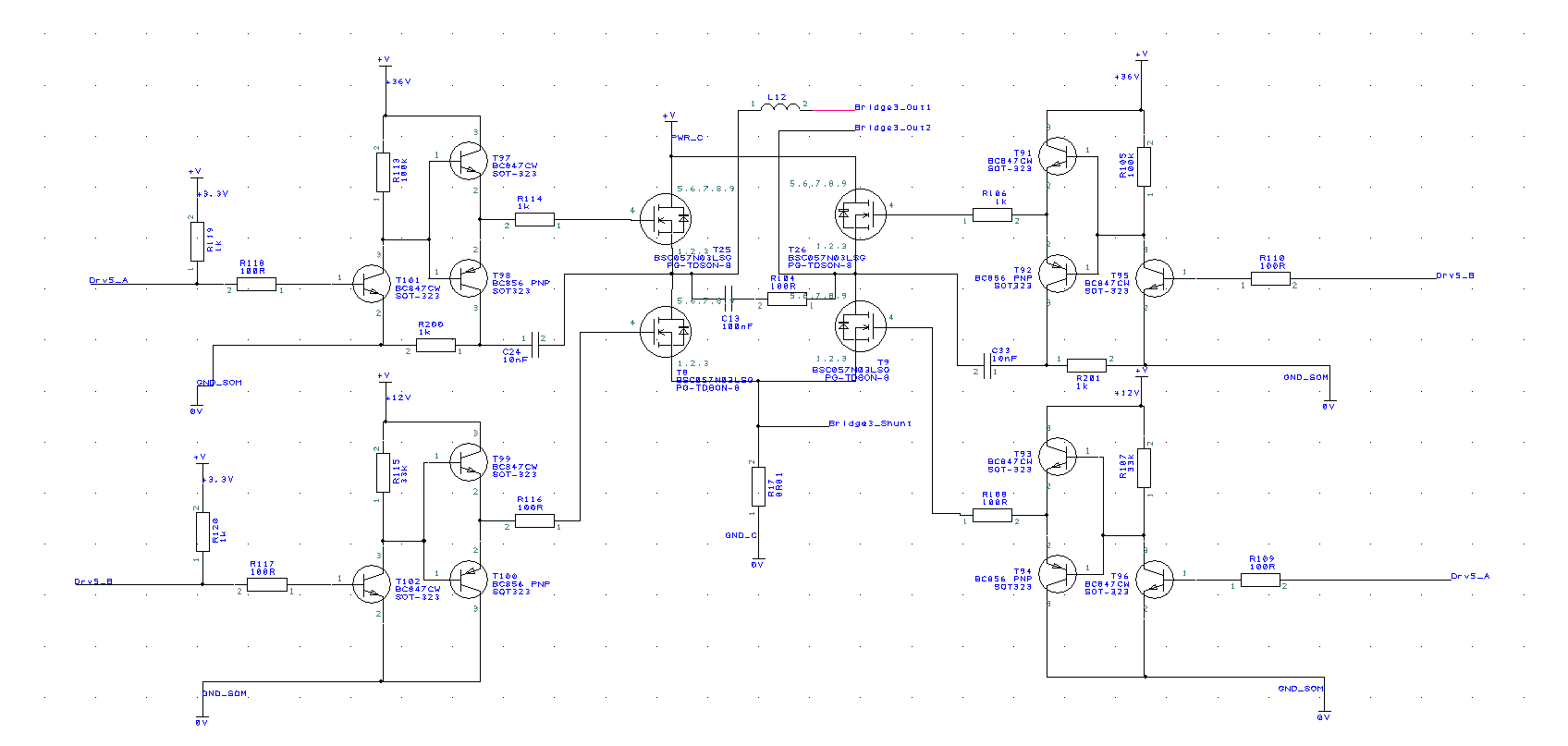
Hallo, ich habe folgendes Problem, im Anhang ist ein Bild der aufgebauten H-Brücke. Im Versuchsaufbau lässt sich der Schrittmotor mit der Schaltung ansteuern. Ich kann über PWM den Motorstrom auch regulieren, allerdings bin ich mit dem erreichbaren Motorstrom nicht zufrieden. Ich habe die Schaltung bisher mit einer PWM Modulationsfrequenz von 50 kHz betrieben. Wenn ich mir meine Motordaten ansehe 4.4mH, 1.44 Ohm dann war die Ansteuerfrequenz viel zu hoch. R*L = 6.33 ms (ca. 160Hz). mit 25kHz kann ich leichter einen höheren Motorstrom erreichen. Welche Ansteuerfrequenz würdet Ihr wählen? Weiters verwende ich eine EMV-Drossel (L12 im Schaltplan) mit 220uH (WE 76 https://www.distrelec.at/de/induktivitaet-smd-220-uh-20-wuerth-elektronik-7687709221/p/30009018?q=7687709221&page=1&origPos=1&origPageSize=25&simi=97.5). Motor http://de.nanotec.com/fileadmin/files/Datenblaetter/Hohlwellen_Schrittmotoren/ST5918S3008-L2.pdf Noch eine Frage: Im Testbetrieb werden bei geringem Motorstrom alle Schritte umgesetzt. Bei Erhöhung des Motorstromes (auf ca. 2A Spitze) werden nicht mehr alle Schritt vom Motor gefahren. Ist die Spule des Motors bereits in der Sättigung? Der Motor ist im Leerlauf (ohne Last). Würde sich das Verhalten mit mechanischer Last (Moment) auf der Welle ändern?
Angehängte Dateien:
-

H-Bruecke.png
40 KB
Ich sehe keinen Schrittmotor oder wie diese Schaltung einen Schrittmotor ansteuern könnte. Ein Schrittmotor braucht eine Konstantstromregelung, um maximale Drehzahl zu erreichen. Mit PWM kann man einen DC-Motor in der Drehzahl beeinflussen bzw. regeln.
Hallo, Warum soll ich den Strom beim Schrittmotor nicht auch mittels PWM - Regeln können? für BLDC Motoren funktioniert die Regelung ja auch. Ich kann auch mit dem Versuchsaufbau den Strom über den Motor mittels PWM bereits regulieren. Ein Beispiel für Schrittmotorstromregelung mittels PWM: http://service.projektlabor.tu-berlin.de/wordpress/search-e/wp-content/uploads/sites/8/2014/07/B4_StromregelungFolien.pdf lg
Hi, bei "BLDC Motoren funktioniert die Regelung ja auch" lässt auf profundes Basiswissen schließen... Man kann Stepper im closed-Loop-Modus "fast" wie einen BLCD betreiben. Das Prinzip ist aber völlig anders. Nur sehr wenige Hersteller bieten praxistaugliche Controller dafür an. Grüße Runout
Hallo Thomas, du hast recht, ich bin mit dem Thema Schrittmotorsteuerung und BLDC Motorsteuerung noch wenig vertraut. Das ist auch der Grund warum ich im Forum Nachfrage. Ich bin wirklich dankbar für Ideen und Hinweise wie die Stromregelung in dieser Variante funktionieren könnte bzw. warum diese Variante nicht funktionieren kann. Natürlich auch für Literaturempfehlungen. Ich steuere die gezeigte Schaltung mittels FPGA. Ich kann in einem Sinusprofil (mittels PWM-Pulsbreite) den Motorstrom pro Schritt erhöhen und verringern. Wie gesagt der Motorstrom lässt sich dadurch auch regulieren. Ich habe es in dieser Version verabsäumt ein "Freewheeling" (Freilaufen der Spule während der aus Phase des PWM-Signals) einzubauen, weshalb das Feld in der Spule nur langsam abgebaut wird und vermute dort ein Problem in der Ansteuerung. Der Mosfet BSC057 verfügt über interne Freilaufdioden. Es wäre jedoch Sinnvoll eine Seite der Spule gegen 24V zu schalten um den Abbau des Feldes zu beschleunigen. Ich will den Motor jedoch ohne Positionssensor (Closed Loop) steuern. Ein weiteres Problem, dass sich zeigt ist bei Erhöhung des Motorstromes (der Pulsbreite) kommt es zu Schrittverlusten. Ich betreibe den Motor bis jetzt nur im Leerlauf. Kann ich mit zunehmender Last den Strom weiter erhöhen? Kommen die Schrittverluste daher, dass der Motor in der Sättigung ist?
Sofarocker schrieb: > R*L = 6.33 ms (ca. 160Hz) Eher L/R. Der snubber hat recht hohe Werte, ob das was hilft. Drosselspule solte man symmetrisch aufbauen. Hier aber nur hinderlich und wiederum stromanstiegbegrenzend. > Welche Ansteuerfrequenz würdet Ihr wählen? Steht in Datenblätter vom Schrittmotor. Suche weiter nach Diagrammen. > Noch eine Frage: > Im Testbetrieb werden bei geringem Motorstrom alle Schritte umgesetzt. > Bei Erhöhung des Motorstromes (auf ca. 2A Spitze) werden nicht mehr alle > Schritt vom Motor gefahren. Ist die Spule des Motors bereits in der > Sättigung? Nein. Aber eher deine Drossel. Mach die mal raus. > Der Motor ist im Leerlauf (ohne Last). Würde sich das Verhalten mit > mechanischer Last (Moment) auf der Welle ändern? Ja. Wie hast du den Chopper implementiert? Hast du ein Oszi? Wie steuerst du die Eingänge? Die Mosfets brauchen ein wenig Zeit bis die sich ausschalten, sonst entsteht ein Kurzschluß, jedesmal beim Schalten. Highside Mosfets brauchen eine höhere Spannung zum Durchschalten (Ladungspumpe). Die Gatespannung kann man dann einer mit Z- Diode begrenzen. Wenn du was basteln willst, dann nehme zwei L6203 und implementiere mikrostepping drauf.
Hallo Sofarocker, > du hast recht, ich bin mit dem Thema Schrittmotorsteuerung und BLDC > Motorsteuerung noch wenig vertraut. Das ist auch der Grund warum ich im > Forum Nachfrage. ... > Ich will den Motor jedoch ohne Positionssensor (Closed Loop) steuern. Du suchst dir also als Anfänger gleich mal die komplizierteste Aufgabe: diskrete H-Brücke und dann noch sensorlose Regelung? Das wird so nichts. Fang erstmal mit den Grundlagen an: gesteuerter Betrieb, fertiges IC für Mikroschrittansteuerung mit integrierter H-Brücke. Oder noch besser: Kauf gleich etwas fertiges. Es sei denn, der Weg ist das Ziel ;) Mit freundlichen Grüßen Thorsten Ostermann
Sofarocker schrieb: > Ein weiteres Problem, dass sich zeigt ist bei Erhöhung des Motorstromes > (der Pulsbreite) kommt es zu Schrittverlusten. Ich betreibe den Motor > bis jetzt nur im Leerlauf. Kann ich mit zunehmender Last den Strom > weiter erhöhen? Kommen die Schrittverluste daher, dass der Motor in der > Sättigung ist? Eher durch Resonanzen, dasselbe Problem wie beim BLDC. Es wird mit einer Bremsresonatorplatte oder einfach mal mit dem Finger wie Welle bremsen besser. Du kannst auch ohne Last den Strom erhöhen bis zur Spezifikation deines Motors, der wird dann 80 GradC heisser als die Umgebung was er gerade noch aushält und hat dann auch die im Datenblatt angegebene Kraft. Ich würde C24 und C33 durch 0 Ohm erseten, R114 R106 durch 100R, und T101, T95 als Konstantstromquellen schalten so dass R113 und R101 niederohmiger werden. Die Versorgung der Treiber V+ mit 36V und der Motoren mit V+ ist hoffentlich nicht dasselbe V+, sondern an den Motoren nur V+ mit 24V, sonst funktioniert die Ansteuerung nicht, auch nicht mit C24/C33.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.