Ich habe wenig Erfahrung mit Arduino, außer ein paar Lichtschaltungen, also ja ihr könnt gerne auf mich losbeißen ;). Ich habe (leider) ein Projekt vor Augen undzwar einen Roboter zu bauen bzw. eine Spinne, die anfängt zu laufen sobald ich sie/es(wer auch immer) an einer Energie-Quelle anschließe und damit ist eine 9V Batterie gemeint. Wie ich bereits gesagt habe, habe ich recht wenig Erfahrung mit Arduino und deshalb möchte ich gerne Links, Seiten, ... von euch um mich vorzubereiten. Außerdem : Ich verstehe nicht ganz warum manche behaupten, dass Servo Motoren nicht gerade billig seien. Kauf-Link : https://m.aliexpress.com/item/32679379206.html Ich werde aufjedenfall eine menge Hass abbekommen dafür ,dass ich mir nicht bestimmte Anleitungen durchgelesen habe, naja mich würde es freuen wenn mir jemand solche Anleitungen mitgesenden kann.
Astro P. schrieb: > Roboter zu bauen ist immer ein interessantes aber auch anspruchsvolles Projekt, bei dem man viel Arbeit, Zeit und Gehirnschmalz investieren muss. vorallem die Mechanik ist das Problem. Deine Auswahl der 9V Batterie als Energiequelle ist schon ungünstig. Da wird sich nicht lange was Bewegen. 3 kleine Lithiumzellen sind wesentlich besser.
Ich baue zur Zeit einen Rasenroboter und habe alle Anregungen im Netz gesucht und gefunden.
schönes Projekt, das hab ich vor 5 Jahren auch mal angefangen. Und auch als Anfänger hab ich den Roboter zum laufen bekommen. Bei www.Roboternetz.de werden alle deine Fragen beantwortet. Lies dich dort am besten erstmal durch das Wiki. Dann weißt du auch warum die Servos so teuer sind.
Ich habe mir diesen Artikel durchgelesen :http://rn-wissen.de/wiki/index.php?title=Servos Aber die Bauteile sehen nicht gerade teuer aus ;) Ich will keinen AC-Servo, eher DC. Dennoch habe ich fragen für dich: 1. Wie lange hat dein Projekt gedauert bis deine kleine aber feine Robo-Spinne ihre ersten Schritte gemacht hat? 2. Wie teuer (in Euro) ist das Projekt gewesen? 3.(!) Musstest du löten? 4. Ist mein gefundener Servo-Motor benutzbar? Link:https://m.aliexpress.com/item/32679379206.html
Angehängte Dateien:
-

2016-07-23_18.17.20.jpg
180 KB
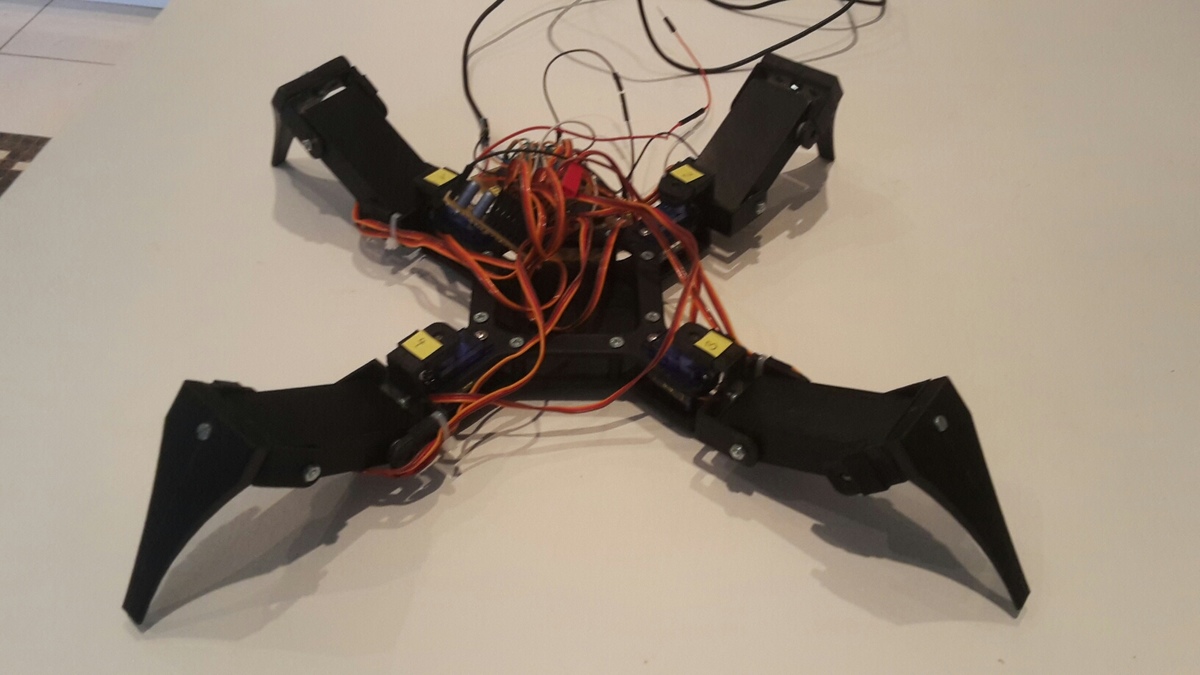
Ich baue auch gerade an so einem Projekt. Ich habe 12 von solchen Modellbau-Servos genommen, die du dir auch raus gesucht hast (vier Beine mit jeweils 3 Gelenken). Die Servos sind nicht besonders stark / robust. Deswegen musst du drauf achten, dass die Mechanik nicht zu schwer wird. Wie und woraus möchtest du die Spinne bauen?
Hi >Welche Lernmaterialen würdest du mir empfehlen? Grundlagen der Elektronik und Grundlagen der Programmierung. >Aber die Bauteile sehen nicht gerade teuer aus Woran siehst du das? > Ich will keinen AC-Servo, eher DC. Was verstehst du unter AC-Servo bzw. DC-Servo? MfG Spess
sehr interessant! Könntest ein kleines Video oder .gif anhängen wenn die Spinne anfängt zu laufen?. Ich weiß es noch nicht ganz genau welches Material ich verwenden werde, aber ich werde entweder Plastik ,Holz oder was auch immer noch im günstigen Bereicht ist nehmen. Wieviel kostet der "Rahmen" bzw. die Gelenke und alles drumherum?
Mit der Programmierung bin ich noch nicht so weit. Wie gesagt, baue ich noch an dem Projekt. Die Gelenke bestehen auf der einen Seite aus dem Servo und auf der anderen Seite aus einem kleinen Kugellager. Rahmen und Beine hab ich mit dem 3D Drucker gemacht. Momentan bin ich dabei, die genauen Bewegungsabläufe auszutüfteln. Ist nicht ganz trivial, wenn es einigermaßen geschmeidig aussehen soll, weil bei jeder Bewegung 12 Servos aufeinander abgestimmt werden müssen. Wenn du keinen Zugriff auf einen 3D Drucker oder Lasercutter hast, würde ich dazu raten, leichtes Holz zu nehmen... Wie soll denn die Steuerung bei dir laufen? Oder soll der nur geradeaus laufen, sobald der Roboter eingeschaltet wird?
eigentlich sollte er mehr können als nur gerade aus zu laufen.
Angehängte Dateien:
-

20141115_141030.jpg
240 KB
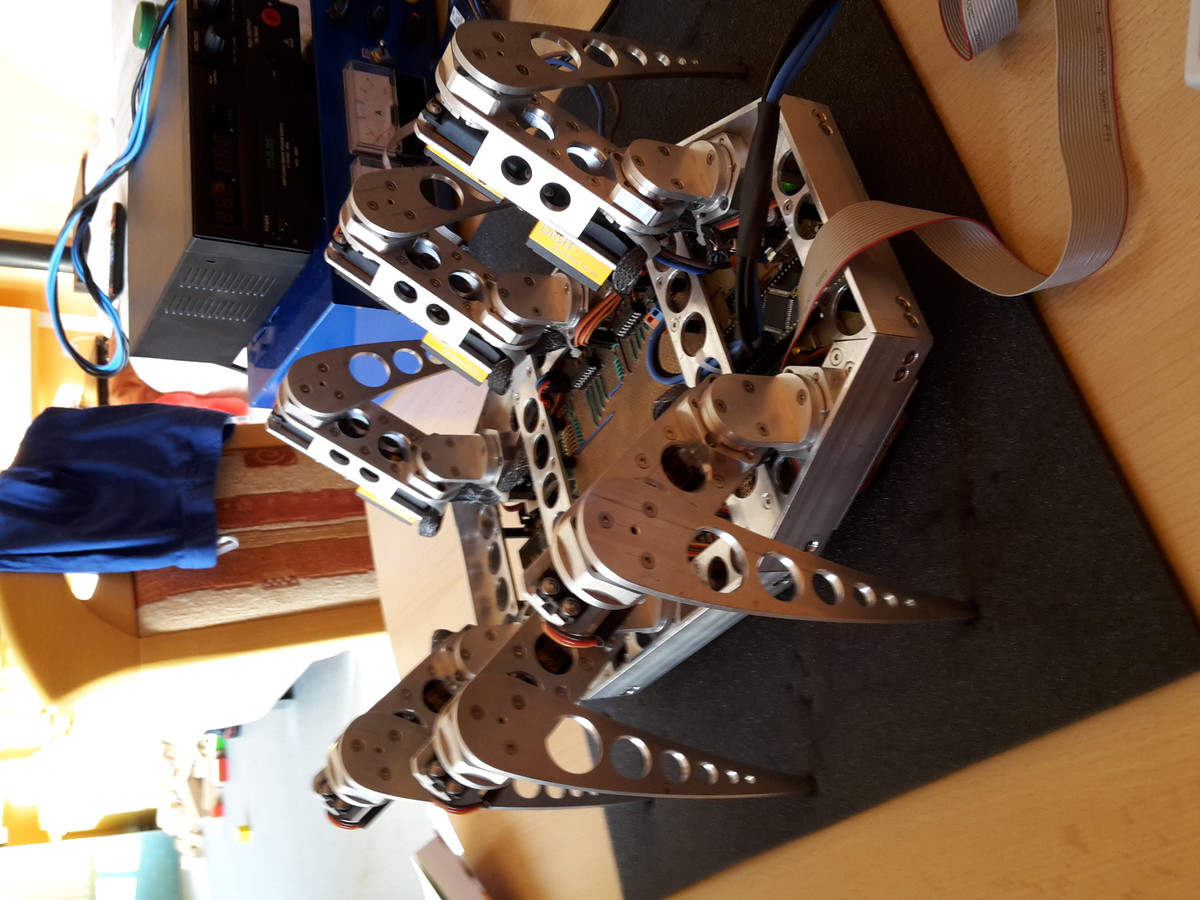
Wie lange ich gebraucht habe ich nebensächlich. Da ich Beruflich oft unterwegs bin und es auch noch zwei mal Nachwuchs gab, ist das Projekt nicht sehr schnell vortgeschritten. Das erste Jahr hab ich damit verbracht 3 Servos an nur einen provisorischen Bein anzusteuern, und mir dabei ein KI auszudenken. Erst als das geklappt hat habe ich 6 Beine gebaut. Und alle 6 Beine (18 Servos) zu koordinieren ist ganz schön aufwendig. So soll der Robo ja nicht wackeln, und "Hinfallen". Dazu noch um die Kurve laufen und sich im Kreis drehen. Das ganze dann mit 3, 4 oder 5 Beinen am Boden. Damit das auch noch flüssig aussieht sollte jeder Servo mindestens 50 mal pro Sekunde angesteuert werden. Da braucht man schon ein wenig Rechenleistung, aber ein 8 Bittiger µC schafft das. Wenn du jetzt mal das Gewicht deiner Servos, des Rahmens, des Akkus und sonstigen Sensoren addierst, und das mit deiner Beingeometrie verrechnest bekommst du für die Hüfte (Gelenk Bein<->Roboterrahmen) das Drehmoment raus. Und nun suchst du mal passende Servos raus. Da ist es mit 2€ nicht mehr getan. Aus eigener Erfahrung kann ich dir sagen, nimm welche die doppelt so Stark sind. Meine machen 200Ncm, und das ist schon Kotzgrenze. Aber ich hab es auch übertrieben und den Hexabot aus Alu gebaut. Das Zeug ist einfach viel zu schwer. Du meinst mit den AC / DC Servos bestimmt Analog vs. Digital. Dann nimm auf jeden Fall Digitale, die Speichern sich den Übertragenen Sollwert und steuern den Motor wesentlich öfter an als Analoge (50Hz). Der Sollwert wird mittels PWM übertragen das sollten deutlich mehr als 8 bit sein, ich nutze 4096 Digits (11bit). Es gibt speziele Roboter Servos, die haben den Kugellagersitz (Gegengelenk) gleich mit im Gehäuse. Diese kosten dann aber auch gleich ~50€, aber dafür gibt es gleich noch die IST-Position zum auswerten, was auch sehr praktisch ist.
(Guest) Astro Physik schrieb: > eigentlich sollte er mehr können als nur gerade aus zu laufen. Dann brauchst du auch eine Serielle Verbindung mit der Steuereinheit. Bei mir wird das über Bluetooth zum Android Handy laufen. Muss man sich dann halt zusätzlich auch noch um die Handy App kümmern. Momentan hab ich es noch per Kabel am Laptop...
@Miele Nutzer: läuft bei dir die Berechnungen der Bewegungen in Echtzeit auf dem Controller, auf der Steuerung oder hast du vorberechnete Bewegungsmuster in Tabellen?
ein interessantes Projekt, wenn auch nicht neu... (Guest) Astro Physik schrieb: > 3.(!) Musstest du löten? ...ich hoffe doch nicht! und auch goourgeln muß nicht sein. Sprechen, Schreiben und Träumen ist viel schöner. Und was mich immer sehr stört, ist die Tatsache, dass ein Spinnentier 8 Beine hat...und deine Spinne? Hilfreich ist auf jeden Fall der Beitrag "50 Servos an Controller" Viel Spass und Erfolg, Rainer
Dominik R. schrieb: > @Miele Nutzer: läuft bei dir die Berechnungen der Bewegungen in > Echtzeit auf dem Controller, auf der Steuerung oder hast du > vorberechnete Bewegungsmuster in Tabellen? Läuft bei mir in Echtzeit (ca. 80-150 mal pro Sekunde) Ich habe mich gegen Tabellen entschieden, weil ich mich nicht mit eingeschränkten Bewegungsmöglichkeiten abfinden wollte. Wobei ich mich jetzt nicht wie ein klassischer Hexa bewege (in jede Richtung) sondern nur Vorwärts, rückwärts, Kurve und um die eigene Achse. Ich dachte eher an einen Käfer den ich per Fernbedienung steuere. Ja löten musste ich schon, ohne wird es schwierig mit der Auswahl der Komponenten. Es gibt zwar Servobords die 21Servos ansteuern, und Kontrolle die die Berechnungen durchführen, aber ich wollte es möglichst in einen Chip. Nun sind es bei mir zwei und einer davon tut noch nicht viel. Am Kabel hängt meiner auch noch(Kabelfernbedienung). Aber Bloothoot ist gerade in Arbeit.
Wirklich gut gelungen und beeindruckend schnell... Aber Spinnen haben 8 Beine...
Sehr beeindruckend! Die Spinne läuft schnell und realistisch. Hm ich versuche mal erst mit Servo-Mororen herumzuexperimentieren und dann, falls ich mit den Materialien ertraut fühle, werde ich größeres anfangen dennoch Danke! mfg
Vielen Dank für die Lorbeeren Mani W. schrieb: > > Aber Spinnen haben 8 Beine... Weil mir das auch schon aufgefallen ist rede ich von "Hexa" oder "Käfer" ;-)
Echt super. Bis mein Roboter einigermaßen läuft, wird noch viel Wasser den Nil runter fließen...Aber dein Käfer motiviert mich da echt, schnell weiter zu machen :-)
(Guest) Astro Physik schrieb: > Sehr beeindruckend! Die Spinne läuft schnell und realistisch. > > Hm ich versuche mal erst mit Servo-Mororen herumzuexperimentieren und > dann, falls ich mit den Materialien ertraut fühle, werde ich größeres > anfangen dennoch Danke! > > mfg Da ich auch mal bei fast 0 angefangen habe, bin ich Schritt für Schritt vorgegenagen. Erstmal den µC zum laufen zu bekommen, dann mal einen Servo ansteuern, und Später dann 3 Stück die mittels Sperrholz verbunden waren. Als die dann einen geraden Strich auf dem Papier hin bekomen haben wurde dann der Roboter gebaut. Obwohl geradeaus laufen noch die einfachste Aufgabe war. Mit nur einen Bein, was mach erstmal sehr Kostengünstig machen kann, kann man dann schonmal Erfahrungen sammeln. Damit man nicht gleich 4 oder mehr Beine neu bauen muß. Immerhin sind die Servos ja nicht gerade billig, die ersten 3 sind bei mir auch nacheinader Abgeraucht. viel Erfolg beim Basten :-)
geiles video meinte ich natürlich. ich fand es nur lustig wie sie vor schreck das spielzeug aht fallen lassen udn dann drauf zu ging, sie scheint sowas gewöhnt zu sein :D
morob65 schrieb: > geiles video meinte ich natürlich. > ich fand es nur lustig wie sie vor schreck das spielzeug aht fallen > lassen udn dann drauf zu ging, sie scheint sowas gewöhnt zu sein :D Sie spielt gern damit, wenn auch noch nicht so wie die "großen Kinder" ;-)
morob65 schrieb: > ist eine tabelle mit korrektur nicht systemeffektiver? effektiver im Sinne von Ausführungszeit auf einen 8-bitter schon. Aber wenn ich mir überlege das ich, aus jeder Beinstellung herraus, in jede Richtung das Bein bewegen will, dann sind mir das eindeutig zu viele Tabellen. Und falls es der 8-bitter mal nicht mehr schafft gibt es ja noch die ganzen ARMˋs. Außerdem hab ich das Programmieren nie gelernt, deshalb bin ich froh das so schön geht. ;-) mfg
ach der Ramverbrauch beträgt nur ca. 280byte.... Ich meinte schon das Programmieren an sich, was ich nie gelernt habe. Mal abgesehen von bissel SPS-Spaß in der Lehre.
lach ich habe 1982 programmieren gelernt, assembler und pl/1 :D
da mußte ich mich schon mit großrechnern rumärgern :D 1984 ging dann der ernst des lebens los :D


e-d schrieb: > Großrechner im wahrsten Sinne! > *https://de.wikipedia.org/wiki/Robotron_300 Der Vorteil der Russischen Mikroelektronik ist ja die Begehbarkeit im Fehlerfall. ;-)
lach, nee, sowas hatten wir nicht ec1040 ec1055 ibm4361 ...
@Astro Physik warum fängst du nicht mir 2 rädern an, die erfahrungen kannst du dann ...
@ Miele Nutzer (Gast) Ist das von Dir? http://www.thingiverse.com/thing:585 Habe zur Soft bisher nur das gefunden: http://www.hexapodrobot.com/forum/viewtopic.php?f=25&t=160&st=0&sk=t&sd=a&sid=7a1038b38324d4176f776c1ac8fe3817
Stephan G. schrieb: > @Astro Physik > warum fängst du nicht mir 2 rädern an, die erfahrungen kannst du dann > ... finde ich irgendwie lau... mfg
Hi Dann passt es doch perfekt zu deinen Kenntnissen. Mit freundlichen Grüßen spess
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.