Hallo zusammen, für ein aktuelles Bastelprojekt benötige ich eure Hilfe. Mein Ziel ist Folgendes: Ich möchte die Drehzahl eines 12V DC Motors (Leistungsdaten s. unten) mittels PWM steuern. Das ganze soll (beim Einschalten) mit einer Art "Softstart" funktionieren, sodass der Motor aus dem Stillstand langsam anläuft und ca. 2-3 sekunden benötigt, um auf die finale Drehzahl zu kommen. Der Motor: 12V DC; Max. 8000 rpm;Leerlauf Stromaufnahme 0,5A; Max. Stromaufnahme 8,5A; Max. Leistung ca. 50W; Nach etwas recherche bin ich auf den TL494 Chip gestoßen, der wohl die kostengünstigste Lösung für meine Aufgabe darstellt. Zum Chip habe ich die Folgenden Anleitung gefunden: http://www.atx-netzteil.de/pwm_softstart_softstopp_mit_tl494.htm Leider werde ich daraus nicht zu 100% schlau. Nach meinem Verständnis kann ich durch P1 einstellen wie lange die Anlaufphase für den Motor dauern soll. Wie kann ich aber die zu erreichende Drehzahl begrenzen? Ich hoffe ihr könnt mir hier weiterhelfen. Besten Gruß!
:
Verschoben durch User
Untertreiber schrieb: > Wie kann ich aber die zu > erreichende Drehzahl begrenzen? In dieser Schaltung ist keine Regelung vorgesehen - der Motor wird soft auf 100% hochgefahren. Wenn du eine Steuerung benötigst, kannst du dafür den 2ten unbenutzen Error Amp des 494 benutzen (Pin 15 und 16). Eine Regelung benötigt zusätzlich eine zur Drehzahl proportionale Spannung vom Motor.
:
Bearbeitet durch User
Hallo und Danke für die schnelle Antwort! auf der gleichen Seite gibts eine Anleitung zur PWM mit dem selben IC: http://www.atx-netzteil.de/pwm_mit_tl494.htm Scheinbar macht die Position eines einzigen Kondensators den Unterschied. Es geht also nicht so einfach, die beiden Schaltpläne zu kombinieren? Das hatte ich nämlich gehofft.. Könntest du denn für mich Anfänger grob beschreiben wie ich den Schaltplan um die nötige Regelung zum langsamen Hochfahren auf X% Motorleistung erweitern kann?
Bleiben wir mal bei der ersten Schaltung. Hier wird per Error Amp 1 (Pin 1 und 2) gesteuert, wenn C1 entladen ist (Start) wird die Spannung an Pin 1 hoch sein, um dann mit der Zeit immer geringer zu werden. Wie schnell das geschieht, bestimmt das Poti P1. Analog kann man nun mit Error Amp 2 eine obere Grenze festlegen. Dazu kann man erstmal Pin 15 mit Pin 2 verbinden, um in den Regelbereich der Amps zu kommen (Pin 15 ist dann nicht mehr direkt an REF). An Pin 16 legt man den Schleifer eines Potis (z.B. auch 50k). Das obere Ende des Potis verbindet man mit Ref (Pin 14) und das untere Ende mit Masse. Je weiter man das Poti gegen Masse dreht, umso schneller wird der Motor.
:
Bearbeitet durch User
Angehängte Dateien:
-

TL494-China.png
31 KB
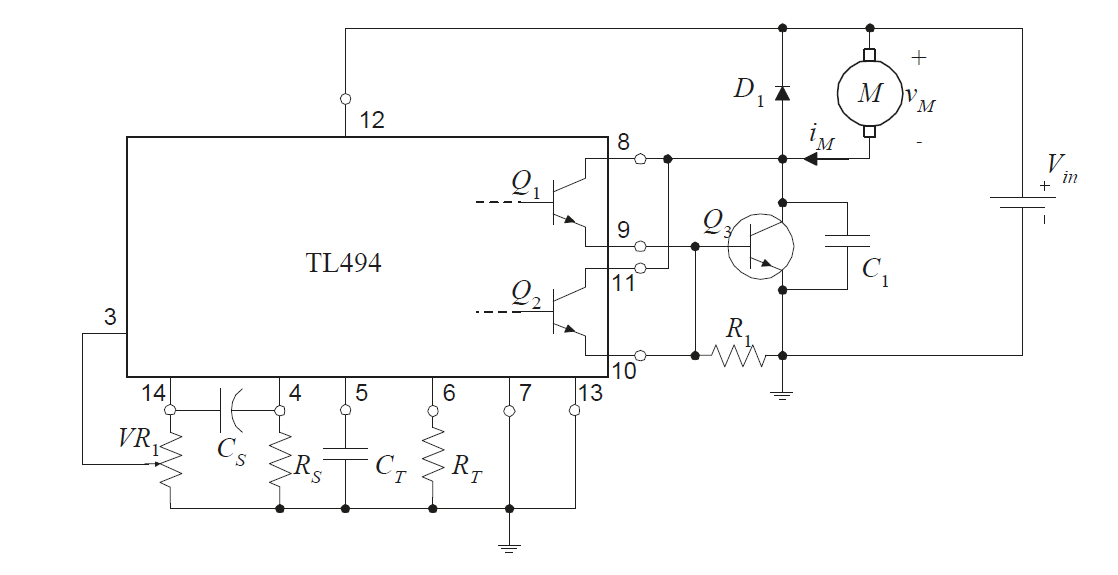
Ok, das sind dann ja zum Glück doch nur ein paar geänderte Steckverbindungen und ein zusätzlicher Poti - ich denke das würde ich hinbekommen! Welche Dioden empfiehlst du denn für die Schaltung mit dem gegebenen Motor? Die Anleitung ist hier ja leider nicht Eindeutig. Falls das eine Rolle spielt - Als Stromquelle dient ein umgebautes ATX-Netzteil mit bis zu 12A bei 12V. __ Ich habe nun parallel weitergesucht und bin noch auf den (aus China stammenden) Schaltplan im Anahng gestoßen, der auch den Softstart und PWM realisieren soll. Darin Geht laut Beschreibung die Geschwindigkeitskontrolle über den Poti "VR1" , der Soft-Start wird über die Zeitkonstante von "Rs" und "Cs" gesteuert. Das sieht allerdings komplett anders aus als der von dir vorgeschlagene, modifizierte Schaltplan. Welche der beiden Lösungen macht denn mehr Sinn für mich? Nochmals vielen Dank für deine Hilfe!!
Der TL494 ist dafür nicht sonderlich gut geeignet, weil er keine 100% Vollast erreicht. Wenns wirklich nur ein Softstart sein soll, verliert der Motor dadurch im Betrieb ein klein wenig Leistung. Da wären andere Lösungen mit einem kleinen µC oder so besser. Außerdem jagt man 8,5A für einen Motor heute nicht mehr durch einen bipolaren Transistor. Da nimmt man einen FET. Diesen kann der TL494 nicht ohne extra Treiberstufe schnell genug ansteuern. Die Schaltung ist auch insofern Müll, daß der Basisstrom des Schalttransistors nicht begrenzt wird. Ein nicht zu knapper Teil der 8,5A fließt demzufolge durch den TL494 und das könnte der krumm nehmen. Die Entstörung bzw. Transistor-Schutz mit C1 ist genauso Kacke, weil dieser bei schneller PWM periodisch aufgeladen und vom Transistor hart kurzgeschlossen wird. Das erwärmt den Kondensator und den Transistor. Ich glaube ein ausreichend spannungsfester Transistor und eine schnelle Diode wäre die bessere Wahl.
Untertreiber schrieb: > Ich habe nun parallel weitergesucht und bin noch auf den (aus China > stammenden) Schaltplan im Anahng gestoßen, der auch den Softstart und > PWM realisieren soll. Den vergessen wir mal ganz schnell wieder. Ben hat schon gesagt, das die Schaltung Quatsch ist und sofort den Endstufentransistor abkocht. > Diesen kann der TL494 > nicht ohne extra Treiberstufe schnell genug ansteuern. Das wiederum ist Unsinn. Natürlich kann der TL494 den MOSFet in der in der ersten Schaltung (erster Beitrag)gezeigten Konfiguration den MOSFet richtig durchschalten und auch schnell genug. Das passiert in hunderten von Wechselrichtern und Autoendstufen genauso. > Welche Dioden empfiehlst du denn für die Schaltung mit dem gegebenen > Motor? Im schlimmsten Fall muss die Freilaufdiode den ganzen Motorstrom aufnehmen und muss also mindestens diesen Strom vertragen. Je nach Motor bist du mit einer dicken schnellen Diode ab 15A dabei.
:
Bearbeitet durch User
Ben B. schrieb: > Die Schaltung ist auch insofern Müll, daß der Basisstrom des > Schalttransistors nicht begrenzt wird. Ein nicht zu knapper Teil der > 8,5A fließt demzufolge durch den TL494 und das könnte der krumm nehmen. Braucht nicht begrenzt zu werden. Die Transistoren bilden einen Darlingtontransistor. Durch das absinken der Kollektorspannung des Endtransistors wird der Strom durch den Treiber begrenzt. Sonst duerfte es keine Darlingtontransistoren geben.
Helmut L. schrieb: > Durch das absinken der Kollektorspannung des > Endtransistors wird der Strom durch den Treiber begrenzt. Da hast du natürlich recht. Allerdings ist im ersten Posting sowieso schon eine Schaltung, die schon viel besser aussieht als das letzte Dings und auf dieser Schaltung kann man ja aufbauen. Dort ist auch die Gefahr, den TL494 durch Gegen-EMK zu himmeln, lange nicht so gross wie mit dem Darlington. Da erwischt es dann nur den MOSFet.
Hallo Leute, vielen Dank für die zahlreichen Beiträge. Die China-Schaltung ist für mich vom Tisch - ich habe die erstgenannte Schaltung mit den von Matthias beschriebenen Änderungen (zweiter 50k Poti) Testweise auf dem Steckbrett realisiert und dafür einen 7,2V Motor aus nem RC Auto mit zugehörigem Akku als Test-Setup angeschlossen. Erstmal tut das System was es soll - vielen Dank für die Hilfe!! Ich würde mich nun noch dafür interessieren ob ich 1. Die "Soft-start-Periode" noch verlängern kann 2. Die Maximaldrehzahl noch weiter verringern kann Zu 1. Habe ich mit der Kapazität von C1 experimentiert (47 uF und 220 uF) - Mit Größerem Elko vergrößert sich allerdings (zumindest nach meiner Einschätzung) nur die Totzeit des Motors - die Rampe scheint danach die gleiche zu sein. Zu 2. Dachte ich mit dem 50k Poti könnte ich den Duty Cycle bis auf 0 herabsetzen - das funktioniert aber nicht wirklich , der Motor dreht auch mit Poti auf Anschlag noch ziemlich schnell. Kann man die Schaltung noch dahingehend verbessern , oder ist das nicht ohne weiteres Möglich?
> Das wiederum ist Unsinn. Natürlich kann der TL494 den MOSFet in der in > der ersten Schaltung (erster Beitrag)gezeigten Konfiguration den MOSFet > richtig durchschalten und auch schnell genug. Das passiert in hunderten > von Wechselrichtern und Autoendstufen genauso. Erzähl doch nicht solchen Scheiß wenn Du es eigentlich besser weißt. Wenn ich einen FET mit wenigen Hz schalten will, dann mag das mit der passiven Low-zieh-Variante funktionieren. Bei mehreren 100 Hz wie in Fahrreglern üblich wäre ich bereits skeptisch. Und bei Schaltnetzteil-Anwendungen wie in Autoendstufen mit etlichen kHz funktioniert das nie im Leben! Da brauche ich beim TL494 eine bipolare Treiberstufe, wobei der 494 oftmals einen Teil davon bildet bzw. einen PNP-Transistor zur Seite gestellt bekommt, der das Gate der Schalttransistoren aktiv nach Masse zieht. > Braucht nicht begrenzt zu werden. Die Transistoren bilden einen > Darlingtontransistor. Durch das absinken der Kollektorspannung des > Endtransistors wird der Strom durch den Treiber begrenzt. Sonst > duerfte es keine Darlingtontransistoren geben. Auch das ist leider Megaschrott. Sagen wir der Endtransistor hat bei Vollaussteuerung noch eine Stromverstärkung von 20. Demnach braucht er bei 8A 400mA (Leistungsgrenze des TL494) Basisstrom, daran ändert auch die Darlingtonschaltung nichts. Bei 10A sinds dann schon 500mA und der 494 wird zur Nebelmaschine. @TE Zum Begrenzen des maximalen Tastverhältnisses hat der 494 einen Eingang an Pin 4 (duty). Schon mal das Datenblatt von dem Ding gelesen? Bedenke aber, daß das keine Drehzahlregelung ist, der Motor wird bei sagen wir 50% duty cycle im Leerlauf deutlich schneller drehen als unter Last. Du kannst den Wert des Potis vergrößern, das müßte die Rampe abflachen. Der Poti kann die Leistung des Motors nicht steuern, da C1 nach der Hochlaufzeit auf volle Vref (5V) geladen ist und demzufolge keine Spannung mehr an Pin 1 gelangen kann. Benutze dazu ein z.B. 10k Poti zwischen Vref und Masse, Schleifer an Pin 4, evtl. noch einen 10..100nF Kondensator von Pin 4 zur Masse zwecks Entstörung.
Untertreiber schrieb: > Zu 2. Dachte ich mit dem 50k Poti könnte ich den Duty Cycle bis auf 0 > herabsetzen - das funktioniert aber nicht wirklich , der Motor dreht > auch mit Poti auf Anschlag noch ziemlich schnell. Schau dir nochmal dien Innenschaltung des TL494 an. Die beiden Error Amps werden mit Dioden verodert und sperren die PWM Erzeugung, wenn ihr Ausgang auf high geht. Um den Motor also noch mehr abzuschnüren, muss der nicht-invertierende Eingang des OpAmps positiver als der invertierende Eingang werden. Noch ein Tipp - besorg dir das Datenblatt von Onsemi, das ein paar mehr Schaltungsbeschreibungen zum TL494 hat.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.