Hallo,
Ich verstehe nicht, warum das folgende Programm auf meinem STM32F4
Discovery Board keinen Interrupt auslöst? Die APB1 Clock ist 45Mhz und
daher müsste ich am Ausgang PD12 ein 9Hz Signal empfangen, doch
anscheinden wird TIM2_IRQHandler nie aufgerufen.
Grüsse
1 #include "stm32f4xx.h"
2 #include "stm32f4xx_tim.h"
3 #include "stm32f4xx_gpio.h"
4 #include "stm32f4xx_rcc.h"
5
6 void InitializeLEDs ()
7 {
8 RCC_AHB1PeriphClockCmd ( RCC_AHB1Periph_GPIOD , ENABLE );
9
10 GPIO_InitTypeDef gpioStructure ;
11 gpioStructure . GPIO_Pin = GPIO_Pin_12 ;
12 gpioStructure . GPIO_Mode = GPIO_Mode_OUT ;
13 gpioStructure . GPIO_Speed = GPIO_Speed_50MHz ;
14 GPIO_Init ( GPIOD , & gpioStructure );
15
16 GPIO_WriteBit ( GPIOD , GPIO_Pin_12 , Bit_SET );
17 }
18
19 void InitializeTimer ()
20 {
21 RCC_APB1PeriphClockCmd ( RCC_APB1Periph_TIM2 , ENABLE );
22
23 TIM_TimeBaseInitTypeDef timerInitStructure ;
24 timerInitStructure . TIM_Prescaler = 10000 ;
25 timerInitStructure . TIM_CounterMode = TIM_CounterMode_Up ;
26 timerInitStructure . TIM_Period = 500 ;
27 timerInitStructure . TIM_ClockDivision = TIM_CKD_DIV1 ;
28 timerInitStructure . TIM_RepetitionCounter = 0 ;
29 TIM_TimeBaseInit ( TIM2 , & timerInitStructure );
30 TIM_ITConfig ( TIM2 , TIM_IT_Update , ENABLE );
31 TIM_Cmd ( TIM2 , ENABLE );
32
33 }
34
35 void EnableTimerInterrupt ()
36 {
37 NVIC_InitTypeDef nvicStructure ;
38 nvicStructure . NVIC_IRQChannel = TIM2_IRQn ;
39 nvicStructure . NVIC_IRQChannelPreemptionPriority = 0 ;
40 nvicStructure . NVIC_IRQChannelSubPriority = 1 ;
41 nvicStructure . NVIC_IRQChannelCmd = ENABLE ;
42 NVIC_Init ( & nvicStructure );
43 }
44
45 void TIM2_IRQHandler ()
46 {
47 if ( TIM_GetITStatus ( TIM2 , TIM_IT_Update ) != RESET ) {
48 TIM_ClearITPendingBit ( TIM2 , TIM_IT_Update );
49 GPIO_ToggleBits ( GPIOD , GPIO_Pin_12 ); //should see a frequency of 9Hz at the Output PD12
50 }
51 }
52
53 int main ()
54 {
55 InitializeLEDs ();
56 InitializeTimer ();
57 EnableTimerInterrupt ();
58
59
60 for (;;);
61 }
Anscheinend stürzt der STM32F4 bei folgender Instruktion ab:
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //Enable Tim2 Interrupt
bzw. bei diesen:
nvicStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&nvicStructure);
Anscheinend sobald also der Interrupt aktiviert wird, crasht der STM32F4
Discovery, warum auch immer.
30.09.2016 15:53 :
Bearbeitet durch User
Am Anfang der main() vermisse ich SystemInit() 1 #include "stm32f4xx_syscfg.h"
2 int main ( void ) {
3 SystemInit ();
4 // und die Konfiguration des Systick
5 if ( SysTick_Config ( SystemCoreClock / 1000 ))
6 {
7 /* Capture error */
8 while ( 1 );
9 }
10 // du kannst ausserdem das Prioritätsschema des NVIC ändern, aber nur
11 // wenn du weisst, was du tust
12 NVIC_PriorityGroupConfig ( NVIC_PriorityGroup_4 ); //4 bits for preemp priority 0 bit for sub priority
Probier das mal. Ansonsten sieht das nämlich alles recht gut aus.
30.09.2016 16:01 :
Bearbeitet durch User
Hallo Matthias,
Ich habe das in main eingefügt, leider ohne erfolg.
So gibt mir der PD12 ein High aus:
1 int main ()
2 {
3 SystemInit ();
4
5 InitializeLEDs ();
6 //InitializeTimer();
7 //EnableTimerInterrupt();
8 GPIO_WriteBit ( GPIOD , GPIO_Pin_12 , Bit_SET );
9
10
11 // und die Konfiguration des Systick
12 if ( SysTick_Config ( SystemCoreClock / 1000 ))
13 {
14
15 /* Capture error */
16 while ( 1 );
17 }
18 }
So hingegen ein Low:
1 int main ()
2 {
3 SystemInit ();
4
5 // und die Konfiguration des Systick
6 if ( SysTick_Config ( SystemCoreClock / 1000 ))
7 {
8 InitializeLEDs ();
9 //InitializeTimer();
10 //EnableTimerInterrupt();
11 GPIO_WriteBit ( GPIOD , GPIO_Pin_12 , Bit_SET );
12 /* Capture error */
13 while ( 1 );
14 }
15 }
Damit scheint was mit der SystemInit() gar nicht hinzuhauen.
Bert S. schrieb: > Damit scheint was mit der SystemInit() gar nicht hinzuhauen.
Da hast du was missverstanden. Das 'while (1)' nach 'SysTick_Config()'
wird nur im Fehlerfall angesprungen und sorgt bei misslungenen Versuchen
für eine Endlosschleife.
Dein Programm sollte dahinter ganz normal weitergehen.
Also:1 int main ()
2 {
3 SystemInit ();
4 // und die Konfiguration des Systick auf 1ms
5 if ( SysTick_Config ( SystemCoreClock / 1000 ))
6 {
7 /* Capture error */
8 while ( 1 );
9 }
10 // hier gehts weiter mit main()
11 InitializeLEDs ();
12 //InitializeTimer();
13 //EnableTimerInterrupt();
14 GPIO_WriteBit ( GPIOD , GPIO_Pin_12 , Bit_SET );
15 // usw. usf.
16 // jetzt die Hauptschleife
17 while ( 1 ) {
18 // hauptschleifen dinge
19
20 } // ende while
21 } // ende main
30.09.2016 16:51 :
Bearbeitet durch User
So bekomme ich ein High an PD12, der Timer löst aber leider immer noch
keinen Interrupt aus.
Ich verstehe das einfach nicht, sobald ich den Interrupt durch
1 IM_ITConfig ( TIM2 , TIM_IT_Update , ENABLE ); //Enable Tim2 Interrupt
bzw. so
1 nvicStructure . NVIC_IRQChannelCmd = ENABLE ;
einschalte, dann scheint das Hauptprogramm zu hängen, also als würde es
durch dauernd neue Interrupt gestoppt. Ich habe dies mit dem Debugger
überprüft.
Ok, ich habe nun herausgefunden, dass der Timer läuft. Das Programm
scheint sich erst aufzuhängen, wenn ich irgendwo die Funktion
GPIO_WriteBit(GPIOA, GPIO_Pin_6, Bit_SET); bzw.
GPIO_ToggleBits(GPIOA, GPIO_Pin_6); aufrufe, warum auch immer das nicht
mit dem Timer verträglich ist.
1 #include "stm32f4xx.h"
2 #include "stm32f4xx_tim.h"
3 #include "stm32f4xx_gpio.h"
4 #include "stm32f4xx_rcc.h"
5 #include "stm32f4xx_syscfg.h"
6
7 void GPIO_Configuration ( void )
8 {
9 GPIO_InitTypeDef GPIO_InitStructure ;
10
11 /* GPIOA clock enable */
12 RCC_AHB1PeriphClockCmd ( RCC_AHB1Periph_GPIOA , ENABLE );
13
14 /* pin configuration */
15 GPIO_InitStructure . GPIO_Mode = GPIO_Mode_OUT ;
16 GPIO_InitStructure . GPIO_Speed = GPIO_Speed_50MHz ;
17 GPIO_InitStructure . GPIO_Pin = GPIO_Pin_6 ;
18 GPIO_Init ( GPIOA , & GPIO_InitStructure );
19
20 }
21
22
23 void TIM2_Configuration ( void )
24 {
25 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure ;
26 int i ;
27
28 /* Enable TIM2 Peripheral clock */
29 RCC_APB1PeriphClockCmd ( RCC_APB1Periph_TIM2 , ENABLE );
30
31 TIM_TimeBaseStructure . TIM_Prescaler = 60000 ;
32 TIM_TimeBaseStructure . TIM_Period = 750 ; //1Hz Interrupt frequency
33 TIM_TimeBaseStructure . TIM_ClockDivision = TIM_CKD_DIV1 ;
34 TIM_TimeBaseStructure . TIM_CounterMode = TIM_CounterMode_Up ;
35
36 TIM_TimeBaseInit ( TIM2 , & TIM_TimeBaseStructure );
37
38 TIM_Cmd ( TIM2 , ENABLE );
39
40 // Likely will interrupt initially unless we clear it
41
42 for ( i = 0 ; i < 3 ; i ++ )
43 if ( TIM_GetITStatus ( TIM2 , TIM_IT_Update ) != RESET )
44 TIM_ClearITPendingBit ( TIM2 , TIM_IT_Update );
45
46 TIM_ITConfig ( TIM2 , TIM_IT_Update , ENABLE );
47 }
48
49 //****************************************************************************
50
51 void TIM2_IRQHandler ( void )
52 {
53 if ( TIM_GetITStatus ( TIM2 , TIM_IT_Update ) != RESET )
54 {
55 TIM_ClearITPendingBit ( TIM2 , TIM_IT_Update );
56
57 //GPIO_ToggleBits(GPIOA, GPIO_Pin_6);
58 }
59 }
60
61 //****************************************************************************
62
63 void NVIC_Configuration ( void )
64 {
65 NVIC_InitTypeDef NVIC_InitStructure ;
66
67 /* Enable the TIM2 global Interrupt */
68 NVIC_InitStructure . NVIC_IRQChannel = TIM2_IRQn ;
69 NVIC_InitStructure . NVIC_IRQChannelPreemptionPriority = 0 ;
70 NVIC_InitStructure . NVIC_IRQChannelSubPriority = 1 ;
71 NVIC_InitStructure . NVIC_IRQChannelCmd = ENABLE ;
72 NVIC_Init ( & NVIC_InitStructure );
73 }
74
75 //****************************************************************************
76
77 int main ( void )
78 {
79 SystemInit ();
80
81 if ( SysTick_Config ( SystemCoreClock / 1000 ))
82 {
83 /* Capture error */
84 while ( 1 );
85 }
86
87 NVIC_Configuration ();
88
89 GPIO_Configuration ();
90
91 TIM2_Configuration ();
92
93 //GPIO_WriteBit(GPIOA, GPIO_Pin_6, Bit_SET);
94
95 int i = 0 ;
96 while ( 1 ) {
97 i = TIM2 -> CNT ;
98 }
99 }
01.10.2016 09:11 :
Bearbeitet durch User
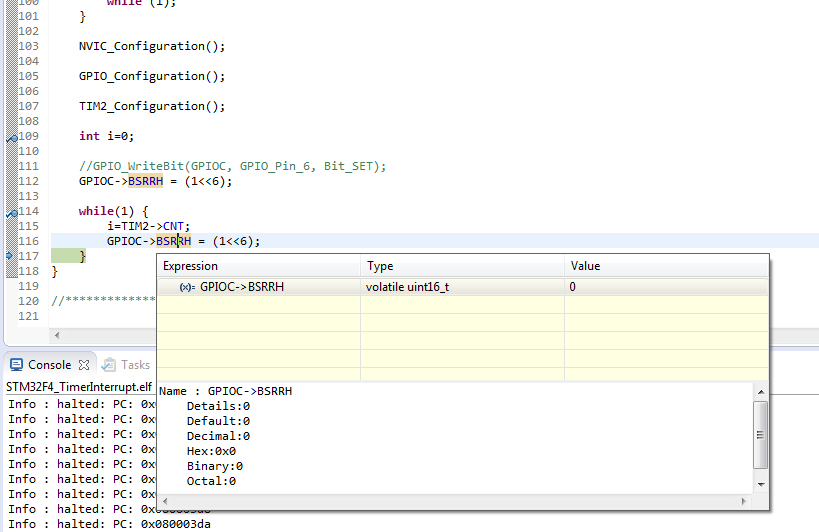
Ich habe hier mal ein Debug Bild, der Wert in GPIOC->BSRRL bleibt immer
0, irgendwie kann ich also den Ausgang nicht mehr setzen. Am Anfang
bleibt der Ausgang PC6 ganz kurz auf high, dann fällt er auf low und
bleibt für immer dort. Hat Jemand schon mal so etwas gehabt? Finde im
Netz nichts dazu.
Edit: es muss natürlich BSRRL sein, nicht BSRRH, doch der Effekt ist der
selbe. irgendwie werden also gleich zu Beginn alle Ausgänge
zurückgesetzt, nachdem der Timer Interrupt aktiv wird, ohne das der
Counter bereits einen Interrupt auslösen würde.
01.10.2016 09:33 :
Bearbeitet durch User
Die Funktion
1 void TIM2_IRQHandler ( void )
wird nie aufgerufen, obwohl der Timer normal läuft und auch resetet
wird.
Ich habe hier noch einen STM32F3 Discovery und mal folgenden Code
probiert:
1 /**
2 ******************************************************************************
3 * @file main.c
4 * @author Ac6
5 * @version V1.0
6 * @date 01-December-2013
7 * @brief Default main function.
8 ******************************************************************************
9 */
10
11
12 #include "stm32f3xx.h"
13 #include "stm32f3_discovery.h"
14
15 volatile int b = 0 ;
16
17 void initTimerTIM2 () {
18
19 RCC -> AHBENR = RCC_AHBENR_GPIOCEN ;
20 GPIOC -> MODER = GPIO_MODER_MODER6_0 ;
21 GPIOC -> OSPEEDR &= ~ ( GPIO_OSPEEDER_OSPEEDR6 );
22 GPIOC -> BSRR = GPIO_BSRR_BS_6 ;
23
24 NVIC_SetPriorityGrouping ( 3 );
25 NVIC_SetPriority ( TIM2_IRQn , NVIC_EncodePriority ( NVIC_GetPriorityGrouping (), 6 , 0 ));
26 NVIC_EnableIRQ ( TIM2_IRQn );
27
28 RCC -> APB1ENR |= RCC_APB1ENR_TIM2EN ;
29 TIM2 -> PSC = 10000 - 1 ;
30 TIM2 -> ARR = 750 - 1 ;
31 TIM2 -> DIER |= TIM_DIER_UIE ; // enable update interrupt
32 TIM2 -> CR1 |= TIM_CR1_CEN ;
33
34 }
35
36 void TIM2_IRQHandler ( void )
37 {
38 // toggle Pin
39 if ( b ) {
40 b = 0 ;
41 GPIOC -> BSRR = GPIO_BSRR_BR_6 ;
42 } else {
43 GPIOC -> BSRR = GPIO_BSRR_BS_6 ;
44 b = 1 ;
45 }
46
47 // clear interrupt flag
48 TIM2 -> SR &= ~ ( TIM_SR_UIF );
49 }
50
51
52 int main ( void )
53 {
54 initTimerTIM2 ();
55 for (;;) {
56
57 }
58 }
Das läuft wunderbar auf dem STM32F3, doch auf dem STM32F4 passiert
nichts. Kann es sein, dass ich einen defekten bekommen habe?
Habe gerade mal hier durchgesucht, aber keiner meiner Codes benutzt
Timer 2 sondern Timer 4. Was mir aber auffällt, das ich aus irgendeinem
Grund vor der Freigabe von Timer Interrupts das IT_Update Flag lösche: 1 // configure the TIM4 interrupt line
2 TIM_ClearITPendingBit ( TIM4 , TIM_IT_Update );
3 TIM_ITConfig ( TIM4 , TIM_IT_Update , ENABLE );
4 NVIC_InitStructure . NVIC_IRQChannel = TIM4_IRQn ;
5 NVIC_InitStructure . NVIC_IRQChannelPreemptionPriority = 0x0b ;
6 NVIC_InitStructure . NVIC_IRQChannelSubPriority = 0 ;
7 NVIC_InitStructure . NVIC_IRQChannelCmd = ENABLE ;
8 NVIC_Init ( & NVIC_InitStructure );
Das hat sicher einen Grund - könnte sich lohnen, das mal auszuprobieren.
Das hier ist sicher ein Tippfehler:
> void TIM2_IRQHandler(void)
> {
> // toggle Pin
> if(b) {
> b=0;
> GPIOC->BSRR = GPIO_BSRR_BR_6; // tut beide Male das gleiche
> } else {
> GPIOC->BSRR = GPIO_BSRR_BS_6;
> b=1;
> }
Du meinst vermutlich 1 GPIOC -> BRR = GPIO_BSRR_BS_6 ;
bei einer der beiden Zeilen. Es reicht aber auch ein 1 GPIOC -> ODR ^= GPIO_Pin_6 ;
Damit toggelt es. Und nicht vergessen , in der ISR das Flag zu löschen,
wie oben schon von dir geschrieben. Sonst wars das mit der ISR.
01.10.2016 19:35 :
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.