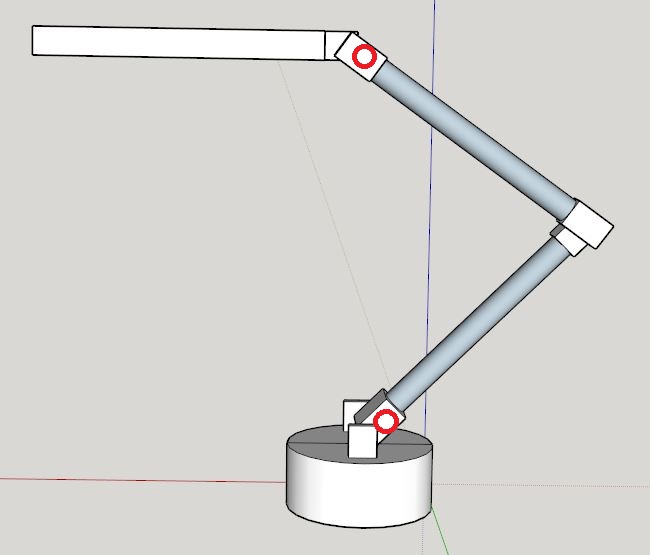
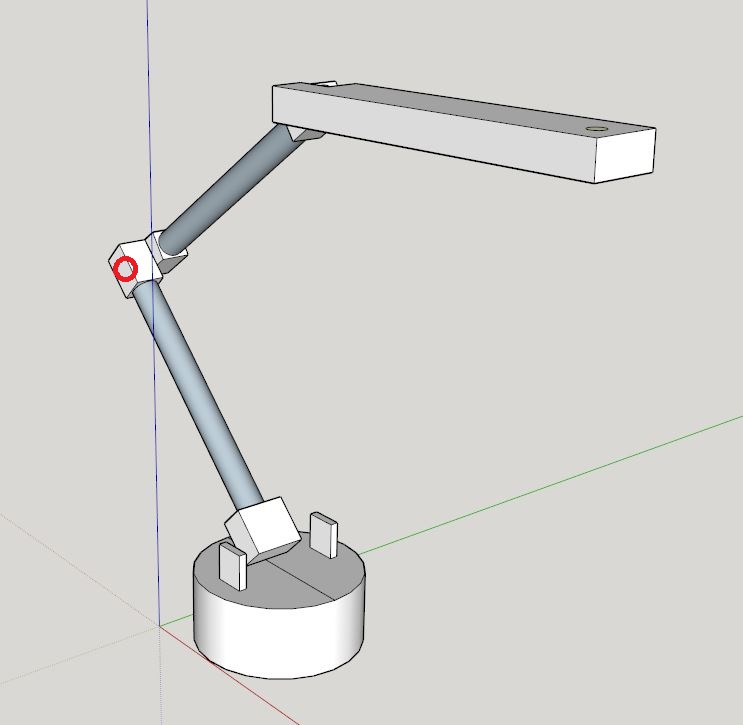
Hallo Community, Ich bin gerade dran, für mein Schulprojekt eine elektrisch höhen-verstellbare Tischleuchte mit Motoren zu bauen. Da ich aber ziemlich neu in Sachen Motoren bin, bräuchte ich dringend eure Hilfe. ;) Bei der Leuchte ist das Hauptproblem der Platz, die Motoren sollten so klein, aber stark wie möglich sein. Natürlich sollte sie, wenn der Strom mal weg ist, nicht zusammensacken -> Sollte deswegen sehr schwergängig sein. Ich habe mich im Internet trotzdem schon mal ein bisschen schlau gemacht und hätte vielleicht etwas geeignetes gefunden, mir aber noch nicht sicher bin. RoboStar SBRS-5314HTG 280°: http://www.hobbyking.com/hobbyking/s...14Sec_81g.html Nun zu der Leuchte selber: Alle Teile sollten aus Aluminium gefertigt werden, da ich sonst noch keine leichtere Variante gefunden habe. Jeder der 3 Arme sollte ca. 30cm lang werden. Die Motoren sollten an den eingezeichneten Stellen im Bild eingebaut werden. Ich hoffe, dass mir jemand weiterhelfen kann, bin schon halb am verzweifeln ;) Mfg, SaimenF
Angehängte Dateien:
-

Tischleuchte1.JPG
37 KB -

Tischleuchte2.JPG
47 KB
Seh ich wie Kurt! Aber bei denen wirst du eine externe Bremse brauchen! Ausserdem gehen noch ein paar Infos von dir ab, damit man dir kompetent helfen kann! Werden die Motoren nur über irgendwelche Taster angesteuert, bei denen die Motoren so lang laufen solle, wie diese gedrückt werden und es wird dann nur bei erreichen der Endlagenschalter der Motor abgeschaltet? Oder willst du zB über ein Poti die Höhe regeln, oder Tastern mit zB 20cm, 30cm,...?! Ebenfalls wäre vielleicht Schneckengetriebe an der Motorwelle etwas?! Gute Kraftübersetzung und geringes Haltemoment nötig um es bei Spannungsfall zu "bremsen"! Gruß
Servos sollte das Einfachste sein. Nur das "halten" könnte damit schwer werden, je nachdem wie viel die Arme wiegen. Alternativ Schrittmotoren mit Getriebe, die dürften genug "Haltekraft" haben.
Das wird mit Servos direkt im Gelenk nichts. An den Gelenken wirken durch die Hebelkräfte sehr große Drehmomente. Das baut man nicht direkt Motoren ein. Besser und noch mechanisch beherrschbar wäre eine Konstruktion aus (Draht)zügen, die dann über Windentrommeln eingestellt werden. So wie früher 3,5 Zoll Floppies positioniert wurden. Oder alternativ Pneumatik oder Hydraulikzylinder, oder kleine Motore mit Spindelantriebe die so eingesetzt werden (S = Spindel oder Zylinder):
1 | / |
2 | / |
3 | /S |
4 | / S |
5 | O S |
6 | \ S |
7 | \S |
8 | \ |
9 | \ |
10 | \ |
Die einfachste Lösung ist und bleibt ein Schneckentrieb. Wenn die Positionen automatisiert angefahren werden sollen, kann Mann eine einfache Lochscheibe mit Gabellichtschranke auf die Motorwelle montieren.
;o) schrieb: > Wenn die Positionen automatisiert angefahren werden sollen, kann Mann > eine einfache Lochscheibe mit Gabellichtschranke auf die Motorwelle > montieren. Damit kannst du noch keine Position anfahren. Dazu brauchst du zusätzliche Endschalter und machst nach dem Stecker in die Steckdose oder sogar bei jedem einschalten eine Referenzfahrt.
Der Andere schrieb: > Damit kannst du noch keine Position anfahren. Dazu brauchst du > zusätzliche Endschalter und machst nach dem Stecker in die Steckdose > oder sogar bei jedem einschalten eine Referenzfahrt. Und wo liegt da das Problem? Wenn man einen Schneckentrieb verwendet, kann man davon ausgehen das sich nach dem Ausschalten die Position nicht ändert. Vor allem wenn Motor und Schneckentrieb verkapselt ist. Es muss also nur einmal reverenziert werden. danach reicht es wenn man vor dem Ausschalten die letzte Position speichert.
Hallo, ich habe Erfahrung mit Servos und auch mit (kleinen) Schrittmotoren. Für Dich habe ich einen Atmega 164 mit 4 Servos-Ansteuerungen, den habe ich "übrig". Die Servos halten es aus, es sind welsche mit mehr als 14 kgr. Haltekraft. Die Stepper sind von Typ NEMA 14 und NEMA 8. Gruß arras
Hallo Simon Fend, da Du keine Zuschriften bisher hast, will ich Dir meine Erfahrungen mit Roboter-Arm berichten: Ich habe einen Roboter-Arm mit 5 Achsen gefertigt in Eigenbauweise, mit Servos und Schrittmotoren und der notwendigen Elektronik dazu. Die Kosten belaufen ungefähr 100 Euro. Kostentreiber sind die Schrittmoteren. Allein die Stepper (3 St.) und die Elektronik machen die Hälfte des Betrages aus. Billiger ist die Servo-Lösung, aber mit dem Manko der nicht gegebenen Nullspannungssicherheit. (Wenn keine Spannung mehr da ist, klappen die Arme zusammen). Dehalb habe ich Stepper genommen, die haben einen besseren Haltewert, aber man kauft das mit größerem Gewicht, aufweniger Elektronik, schwerer Auswahl (China !) und hohem Preis.(Bei dt. Herstellern) Für Dein Projekt solltest Du vorher wissen, was auf Dich zu kommt. Drei Arme mit Stepper zu steuern, macht neben der Mechanik auch Elektronik aus, Du kannst wählen zwischen Fertigmodulen (Arduino) - oder Eigenbau. Ich habe mich für Atmega168 enschieden. (gleiches IC wie im Arduino) Auch der Platzbedarf ist nicht zu vergessen, Soll ein Alu-Profil verwendet werden, so kommt eigentlich ein U-Profil in Frage. Hier scheiden sich die Geister, ich habe mich für 35 mm U-Profil endschieden. Für Dein Projekt läst sich ein 25 mm U-Profil nehmen, weil die Abmaße für NEMA 8 Stepper nur 22 mm sind. Die Stepper werden in Längsrichtung eingebaut und treiben ein Riezel an, das über ein 1 zu 4 Getriebe (oder 6..8) mit 90 Grad die Kraft auf den Arm überträgt. (GEW Standart Rizel) Die Treiber zu den Steppermotoren habe ich bei Pollig gefunden, aber es gibt auch kostengünzigere Quellen ( ~ 3 Euro). Je nach Bedarf (und Kentnissen) kann man wählen zwischen "Handbetrieb" oder "Automatik". So, das ist Alles, was ich Dir noch sagen wollte. Gruß arras
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.