Hallo, Ich baue zur Zeit einen Roboterarm mit Servomotoren. Leider sind diese schwächer als im Datenblatt angegeben und es wird daher vom Gewicht des Arms relativ eng. Als Lösungs würde ich gerne die Motoren durch Federn unterstützen, die ich immer von einem Gelenk zum nächsten ziehe. Da ich mich damit allerdings nicht wirklich auskenne und im Internet so auf die schnelle nichts gefunden habe wollte ich mich damit nochmal in einem Forum melden. Der Arm hat 5 Gelenke (3 Kippgelenke) und ist insgesamt ca 1 m lang. Was für Kennzahlen sind wichtig für die Stärke der Federn? (kenne nur die Formel F=-D*s aus der Schule). Kann gerne auch noch nähere Sachen schreiben zu dem Arm. Fragt einfach nach den Sachen die man wissen müsste
Leistungsdaten der Motoren, Getriebeuntersetzung, Stromaufnahme, Spannung etc. Hebellänge der Armteile - vom Gelenk gemessen (evtl.Zeichnung) Gewicht der Armteile Information über die Gelenklagerungen, Position der Antriebsmotoren ... Wenigstens Photos wären zu Anfang mal ganz brauchbar Wie wäre es evtl. mit Ausgleichsgewichten statt Federn?
>Wenigstens Photos wären zu Anfang mal ganz brauchbar
Und vergiss nicht irgendeine Maßreferenz im Bild, sonst kann man
Millimeter nicht von Zentimetern unterscheiden.
Max H. schrieb: > Ich baue zur Zeit einen Roboterarm > Da ich mich damit > allerdings nicht wirklich auskenne Jetzt weisst du auch warum die Chinesen KUKA gekauft haben! Denen geht es wie dir. Roboter zu bauen ist ebend NICHT TRIVIAL!
Puh Ich habe keine Ahnung was für eine Getriebeuntersetzung die haben https://de.aliexpress.com/store/product/Free-shipping-ASME-01B-High-power-high-torque-servo-the-24V-380kg-cm-0-5s-60/325585_1849833059.html Das ist der stärkste Servo. Die verbauten Abstufungen sind 36Nm, 26Nm, 11Nm (gerundet). An jedem Kippgelenk sind zwei Servos verbaut. Ich habe das Drehmoment der 26Nm Servos mal gemsessen (grob) und kam auf ca 13Nm, allerdings fiel mir hierbei auf, dass die Motoren hierbei bei einem Maximum von 20V statt den 24V waren mit denen ich den Servo betrieb. Auch wurden die Motoren teils extrem heiß und die Leistung wurde im heißen Zustand auch viel geringer. Ich werde daher den Motoren noch Kühlungen spendieren müssen. Da du nach genauen Daten zu Spannung... gefragt hast erwähne ich auch mal dass die Servos später mit 27V 5A betrieben werden Ich habe mal eine Baugruppe in CAD erstellt hier ein paar Bilder. Die ersten beiden längeren Teile sind jeweils cs 40cm lang und das kürzere am Ende ist ca 20cm lang. Die Stangen sind 20x20 Profile von Item und an jeder der Wellen ist ein Schrägkugellager. http://prntscr.com/dq4ax7 Bin diese Woche im Urlaub, daher kann ich keine Bilder vom bisherigen Bau schicken. Wie würde man da Gegengewichte anbringen? Die erste lange Stange hat ca ein Gewicht von 2kg Die zweite Stange hat ca ein Gewicht von 4.5kg Die dritte Stange mit dem Drehgelenk und dann später noch Greifer hat ca ein Gewicht von 2 kg Werden dann auch nochmals bessere Bilder von der Baugruppe kommen, denn CAD läuft an dem Laptop den ich dabei habe ziemlich miserabel (über das öffnen der Datei komme ich da nicht hinaus sonst überlastet der schon ;)) Bezüglich Maßreferenz in dem Bild: Die Servos sind ca 10cm lang
:
Bearbeitet durch User
Würde mich nicht wundern, wenn Du mit Federn nicht glücklich wirst. Außer bei Sonderkonstruktionen haben Federn eine lineare Kennlinie. Die Kräfte an einem Hebelarm lungern aber meist mit dem Herrn Cosinus herum. Natürlich erhöhen Gegengewichte die Masse und machen das System träger - und durch das Eigengewicht auch schwächer - sind aber viel einfacher zu handhaben.
Mit einem Gegengewicht könnte ich halt nur das erste Gelenk entlasten oder? Bzw alternativ an dem ersten ein recht großes Gewicht befestigen, dass die anderen quasi mitträgt
Sebastian S. schrieb: > Würde mich nicht wundern, wenn Du mit Federn nicht glücklich wirst. > > Außer bei Sonderkonstruktionen haben Federn eine lineare Kennlinie. Die > Kräfte an einem Hebelarm lungern aber meist mit dem Herrn Cosinus herum. > > Natürlich erhöhen Gegengewichte die Masse und machen das System träger - > und durch das Eigengewicht auch schwächer - sind aber viel einfacher zu > handhaben. Die Trägheit wäre kein Problem für mich. Aber wozu nutzt man die Gewichte wenn sie das System schwächen? Sonderkonstruktion klingt teuer, dass lass ich lieber ;) Habe zwar Fördergelder für das Projekt (Baue das für Jugend forscht), aber die sind für das Projekt mit 2500€ schon eher knapp edit stimmt mach ja bei ner Kreisbewegung gar keinen Sinn, dass die Belastung linear mit der Ausdehnung steigt
:
Bearbeitet durch User
Sebastian S. schrieb: > Außer bei Sonderkonstruktionen haben Federn eine lineare Kennlinie. Naja -eine zugbelastete Spiralfeder hat eine degressive Kennlinie. Wenn er das so aufbaut, wie zum Bleistift bei Schreibtischlampussen, dann ist das bestimmt schon eine Hilfe gegen sein Problem: https://www.gabler24.com/marken/zuiver/zuiver-lampen/zuiver-stehlampe-office-weiss/a-10003906/?ReferrerID=25&gclid=CPq0n9iRn9ECFaoW0wodjhcIUQ Merke: Feder mag Jeder! :) MfG Paul
Paul B. schrieb: > Sebastian S. schrieb: >> Außer bei Sonderkonstruktionen haben Federn eine lineare Kennlinie. > > Naja -eine zugbelastete Spiralfeder hat eine degressive Kennlinie. Wenn > er das so aufbaut, wie zum Bleistift bei Schreibtischlampussen, dann ist > das bestimmt schon eine Hilfe gegen sein Problem: > https://www.gabler24.com/marken/zuiver/zuiver-lampen/zuiver-stehlampe-office-weiss/a-10003906/?ReferrerID=25&gclid=CPq0n9iRn9ECFaoW0wodjhcIUQ > > Merke: Feder mag Jeder! > :) > MfG Paul So in der Art war das geplant (also hatte geplant immer eine feder von einem Teil des Armes zum Anfang des nächsten zu ziehen) Nur war es mir schleierhaft, wie ich das genau berechne was für eine Feder ich benötige, denn wenn ich wie in der Schule D ausrechne und diese Feder ausrechne dann kommt nicht wirklich das was ich suche. Also da scheine ich nicht das richtige zu suchen. Dennoch stellt sich natürlich die Frage was die bessere Option ist, also Gewicht oder Feder
Max H. schrieb: > ...denn wenn ich wie in der Schule D ausrechne und > diese Feder ausrechne dann kommt nicht wirklich das was ich suche. Also > da scheine ich nicht das richtige zu suchen. Es gibt doch einen Haufen Seiten, wo man etwas drüber lesen kann. > Dennoch stellt sich > natürlich die Frage was die bessere Option ist, also Gewicht oder Feder Ich würde immer Federn vorziehen (brrrrrt-BING!) :) Warum? -Braucht keine extra Platz am Ende des Armes -Hat kaum Eigengewicht MfG Paul
Das mag schon sein, aber wenn man nicht weiß was man sucht ist das auf google ein schwieriges Unterfangen. Und wenn ich auf die Verkaufsseiten für Federn gehe, dann habe ich von dem Großteil der Kenngrößen schlichtweg noch nie gehört (Ich meine außer D und s kenne ich ja auch keine). Selbst wenn ich mir auf Wikipedia durchlese was für Federarten es gibt bin ich noch nicht wirklich Schlauer. Also denke dass es eine Zugfeder sein muss. Ich fand die Schraubenzugfeder von der Befestigung ganz gut, aber ob dass ansonsten irgendeinen Vorteil/Nachteil zu einer anderen Feder bietet weiß ich nicht. Suche natürlich auch selbst weiter, aber wenn du irgendwas kennst das für den totalen Einsteiger (Bin in der 12. Klasse und habe daher wirklich gar keine Vorkenntnisse zur Federn) geeignet ist wäre das natürlich hilfreich (vor allem weil mir gerade jede Seite sagt, dass kein anderes Bauteil in einer solchen Vielfalt hergestellt wird :/)
:
Bearbeitet durch User
Habe jetzt mal etwas gefunden, dass mir zumindest eine Art Berechnung ermöglichen könnte http://www.schmid-federn.de/templates/reinerschmidproduktionsgmbh/pdf/federnfibel.pdf Seite 18
Du hast ja noch nicht mal genaue Abmessungen oder Massen. Wie willst du denn da eine Federkraft berechnen? Max H. schrieb: > ...wie in der Schule D ausrechne... Wie in der Schule, das ist schon mal gut! Aber was hast du denn gerechnet? Max H. schrieb: > Ich habe das Drehmoment ... mal gemsessen (grob) Was hast du gemessen? Und wie hast du gemessen? Was bedeutet eigentlich das "ca" vor jedem Zahlenwert, den du angibst? Ist das eine lateinische Maßtoleranz? Max H. schrieb: > Auch wurden die Motoren teils extrem heiß ... werde daher den Motoren > noch Kühlungen spendieren müssen. Wäre es nicht einfacher, den Fehler in deiner Konstruktion zu finden? Welche Temperatur hast du eigentlich gemessen? Und welche ist für die Servos angegeben/zulässig? Alternativ - stärkere Motoren - frei nach dem Motto "...mit genug Leistung fliegt auch ein Scheunentor..." Max H. schrieb: > ...von 20V statt den 24V waren... Warum? Probleme mit der Energieversorgung? Könnte da vielleicht auch dein Temperaturproblem her kommen? Wie steuerst du eigentlich die Servos? Paul B. schrieb: > wie zum Bleistift bei Schreibtischlampussen, Mechanisch machbar. Interessant wird das Positionieren des Armes. Die Federn lassen sich so blöd abbremsen und schwingen gerne.
Ich habe ja einen Link zu den Servos geschickt. Je nach Bedarf erhöht sich die Spannung. Zugelassen sind die bis 75 Grad. Temperatur wurde am Metallgehäuse des Motors gemessen. (war dann auch in dem Bereich musste dann allerdings abbrechen, da die Servos leicht zu rauchen begannen) Ich habe ja Teile des Arms bereits gebaut. Daher einfach Gewichte an den Arm und dann halt ausgerechnet mit Masse * Hebelarm Das ca bedeutet, dass dieses Messen ziemlich grob ist, aber dass 13Nm weit von 26Nm weg ist ist ja klar. Bei den anderen Werten kann es mal um 100g mehr oder weniger sein. Das muss ich zu Hause dann nochmal genau messen In der Schule ist das F=-D*s (wird dort verwendet wenn es um Schwingungen geht und das wars zu Federn in der Schule auch schon) Haben in diesem Fall immer nur einen Servo betrieben mit einem Schaltnetzteil 24V 5A später bekommt der Arm ein Netzteil mit 27V 68A. Ob das mit der Stromversorgung zusammenhängt mag ich als Laie nicht zu beurteilen, aber an der Platine lagen gemessen 24V an der Motor bekommt aber am Platinenausgang in diesem Fall nur bis zu 20V (Servo bis 30V zugelassen) Steuerung war mit einem Poti (später dann per mc über pwm) Naja neue Motoren kann ich mir auch nicht kaufen ;) soviel Geld liegt nicht rum und von der Leistung her sollten die ja auch genügen. Haben halt weniger Leistung als im Datenblatt erwähnt. Wenn ich für das "Schultergelenk" über den bisher geplanten 72Nm einplane wird das wohl richtig teuer (ich wusste allerdings davor, dass es unter Umständen Probleme mit den Servos gibt, da wenn ich in Europa welche mit einer ähnlichen Leistung gekauft hätte jeder Servo über 500€ gekostet hätte und die jetzt halt bis zu 100$
:
Bearbeitet durch User
Max H. schrieb: > von der Leistung her sollten die ja auch genügen. So so, auf ein mal. Vielleicht ordnest du erst mal deine Prioritäten. Das Forum kann zwar hier und da mal helfen, aber ein ganzes Projekt kann auch hier nicht unterstützt und gelöst werden. Bisschen komisch, dass du Hilfe erwartest und erst mal Urlaub machen willst. So geht das sicher nicht. Da wäre es sinnvoller gewesen erst nach dem Urlaub einen Thread zu eröffnen und nicht vorher. Wir unterstützen, aber wir übernehmen nicht deine Aufgaben. Problem bei der ganzen Konstruktion ist, dass die Masse von der Schwerkraft, je nach Position, höchst unterschiedlich belastet wird. Das kann man weder mit Federn, noch mit Gegengewichten so einfach kompensieren. Die Natur machts doch vor und daran kann man sich orientieren. Für "Jugend forscht" scheint mir dein Denkansatz etwas in die falsche Richtung zu gehen. Da ich nicht glaube, wegen deiner Geldprobleme, das du Tipps annehmen würdest, verzichte ich darauf. Wäre nicht zielorientiert.
So gaaaaanz langsam kommen wir der Sache näher. Wir sitzen hier alle irgendwo auf dieser Welt vor einem Bildschirm - sehen nichts, von dem was du tust - und können nur das beurteilen, was du sagst bzw. schreibst. Alles, was du nicht sagst, können wir nur vermuten. Deine Links sind sicher toll, aber verlangst du von mir, daß ich den Messschieber (Taschenrechner ohne Batterie) zücke, dir helfe und auch noch deinen Links nachgehe? Also bitte Zusammenfassung anhängen. In diesem Forum wirst du einen Haufen hochqualifizierter Spezialisten finden, die Spaß daran haben wissenschaftlich zu arbeiten und anderen zu helfen. Du willst "Jugend forscht" gewinnen? Dann gib "Butter bei die Fische" (norddeutsches Sprichwort). Stell doch überhaupt erst mal dein Forschungsprojekt vor. Was ist denn das Ziel? Dann das, was du schon gemacht hast. Immerhin bist du ja schon über Milestone 3 hinweg und hast den Bau des ersten Prototypen begonnen. Alleine für dein Federproblem fallen (nur) mir zig Lösungsansätze ein. Ich weigere mich aber, mir die Finger wund zu tippen für ein "äääh, hab ich vergessen zu sagen... das ist ganz anders... " Und - ganz wichtig - ein Schritt nach dem anderen. Gleichzeitig die geometrischen Herausforderungen anzugehen UND die Antriebsmotoren zu verändern, ist nicht gut. Ein Schritt ! dann den nächsten. Fangen wir an: Zeig mal, wie gut du zeichnen kannst, mit deinem CAD-System und rück mal Zeichnungen raus. Die wirst du für deine Dokumentation ohnehin brauchen. Aber laß uns mal "nächstes Jahr" weiter machen. Wünsche allen - ach, sucht euch was aus...
Ähm alles in Ordnung, aber ich verstehe die Antwort nicht. Die Konstruktion funktioniert mit den geplanten Motoren nach Plan, aber die Motoren sind nunmal leider in Realität schwächer als von dem Hersteller angegeben. Auch erwarte ich nicht, dass ihr alle Arbeit macht, sondern ich stehe an einem Punkt an dem ich nicht weiter weiß weil mir das Fachwissen fehlt. Also sollte es doch normal sein Menschen um Hilfe zu Fragen die AHnung haben und von Ihnen zu lernen. Ich stehe da wirklich tief in der Schuld von Leuten die mir helfen, aber sage bitte nicht dass ihr die ganze Arbeit macht, denn ich habe in dieses Projekt schon ein ganzes Stück über 500h gearbeitet, besonders weil ich mir jeden Punkt neu erarbeiten musste.
Ja kann gerne alle Pläne ... nachdem ich zurückkomme schicken. Die Motoren will ich doch gar nicht wechseln. Naja erkläre das nochmal alles und gebe genau die Anforderungen ... an Btw geht mir da weniger um den Sieg, sondern mehr darum was ich dabei alles lerne. Dann machen wir da im neuen Jahr weiter. Euch allen einen gute Rutsch
:
Bearbeitet durch User
Cyborg schrieb: > Da ich nicht glaube, ... verzichte ich darauf. Wäre nicht zielorientiert. "Butter bei..." den ersten Spezialisten hast du schon verloren... leider mit Recht.
Ja, aber es wird ne Ganze Menge an Daten sein, daher werde ich da wohl ein paar Tage benötigen um das alles schön aufzubereiten Dann verschrecke ich vielleicht ja nicht noch mehr Spezialisten ;)
Achso und Cyborg, falls du doch nochmal hier reinkommst es würde mich schon interessieren, was du meinst mit dem falschen Denkansatz. Ich bin schließlich hier um zu lernen und zu wissen was ich falsch mache hilft sicher dabei. (Bzw du asinus, da du cyborg hierbei ja offenbar zustimmst. Sonst werde ich das mit großer Wahrscheinlichkeit in Zukunft nicht wirklich besser machen)
:
Bearbeitet durch User
Ich denke auch der bisherige Ansatz ist falsch. Durch Gegengewichte an den einzelnen Achsen kann man Die erforderlichen Drehmomente verringern. Das Ganze wird traeger, geht aber noch. Wir hatten kuerzlich ein Projekt hier, das war ein Roboter aus Sperrholz. Alles schoen ausbalanciert. Der lief mit Drehmoment gegen Null. Wenn Servomotore schwaecher wie im Datenblatt angegeben sind, gibt es zwei Gruende : - sie waren ueberspezifiziert um sich vom Markt abzuheben -> Ramsch - sie bringen die Leistung von Konkurrenten nicht, da Ramsch verbaut wurde.
Max H. schrieb: > Puh Ich habe keine Ahnung was für eine Getriebeuntersetzung die haben > https://de.aliexpress.com/store/product/Free-shipping-ASME-01B-High-power-high-torque-servo-the-24V-380kg-cm-0-5s-60/325585_1849833059.html > Das ist der stärkste Servo. Die verbauten Abstufungen sind 36Nm, 26Nm, > 11Nm (gerundet). An jedem Kippgelenk sind zwei Servos verbaut. Irgendwie kann ich nicht verstehen, wie die beim Chinesen kaufenden Sparbrötchen gerade auf dieses Produkt kommen. Die Motore kann man für rund 15€ hier in D kaufen http://www.ebay.de/itm/Elektromotor-6-12V-DC-Getriebemotor-Modelbau-Motor-NEU-/361834242775?hash=item543f0062d7:g:vKUAAOSwal5YMrd- Dazu eine H-Brücke (Motor Shield), ein Poti und irgendeinen Arduino. Mehr ist das Teil auch nicht. Selbst wenn man wirklich großzügig kauft, kost das ein Drittel bis ein Viertel. An diesem Teil kann man aber erkennen, das Angebot und Nachfrage den Preis bestimmen. Da sich viele schon beim Programmieren einer PWM die Ohren brechen, lassen sich die Chinesen dieses know-how fürstlich bezahlen. MfG Klaus
Ein richtig ausgelegter Druckluftzylinder mit Pufferspeicher oder auch ohne je nach mechanischen Anforderungen kann da auch helfen. Da lassen sich die Unterstützungskräfte auch ändern. Wäre je nach Konstruktion hilfreich. Wollte nur einen neuen Denkansatz liefern.
"Falsch" ist ein hartes Wort. Möglicherweise kennen wir die Hintergründe deiner Konstruktion ja gar nicht. Du hast auch noch immer nichts zum Ziel, bzw. zur Aufgabe des Armes erzählt. Noch nicht Rentner schrieb: > Alles schoen ausbalanciert. Der lief mit Drehmoment gegen > Null. Wie wahr! Keine Federn, keine Gewichte, winzige Antriebsmotoren, keine thermischen Probleme... Max H. schrieb: > ...ein paar Tage benötigen um das alles schön aufzubereiten Keine Dokumentation gemacht? Nicht gut. Max H. schrieb: > Ich bin schließlich hier um zu lernen... Lektion 1 Frage richtig formulieren und alle notwendigen Daten zur Verfügung stellen. "...sollte ausreichen..." oder "...ca..." sind Floskeln des Glaubens. Wir sind hier aber nicht in der Kirche. "...Ich brauch ne Feder..." ist für Cyborg der falsche Denkansatz und deine Formulierungen klingen wirklich so, als ob du "beratungsresistent" und nicht "zielorientiert" wärst. Daher muß ich Cyborg leider Recht geben. Falls es dich beruhigt - etwa 90% aller in dieses Forum eingeworfenen Fragen fangen so an und enden ohne Ergebnis. Nicht mal "Danke" oder "hat funktioniert" kommt zurück. Das macht keinen Spaß und damit steigen viele Leute ganz schnell wieder aus. Der Noch-nicht-Rentner hat dir ja schon "Die Lösung" oder zumindest einen guten Ansatz verraten. Mach was draus. Max H. schrieb: > ...aber es wird ne Ganze Menge an Daten sein... Nein - eine gute Zeichnung mit Maßen und Gewichten reicht erst mal völlig. Photos sind nett und bei Detailfragen schnell gemacht. "Könnt ihr mal meine Jugend-Forscht-Arbeit korrekturlesen" ist ein anderer Thread! Vorschlag: Neuer Thread mit dem Titel z.B. "Schwierigkeiten bei der mechanischen Auslegung eines Roboterarmes" Zeichnung (siehe oben) anhängen. Problem beschreiben. Antworten und Vorschläge überdenken, ggf. nachfragen. Trolle ignorieren Feedback geben (ggf. neuen Lösungsansatz vorstellen)
http://assets.schoener-wohnen.de/thumbnails/galleryImageSmall/0001/00000000001/64/71/64714_schreibtischleuchte_artemide_tizio.jpg So klappt das mit den Gegengewichten :) Grüße Bernd
Angehängte Dateien:
-

Zeichnung_V1.png
80 KB
{kind=link}
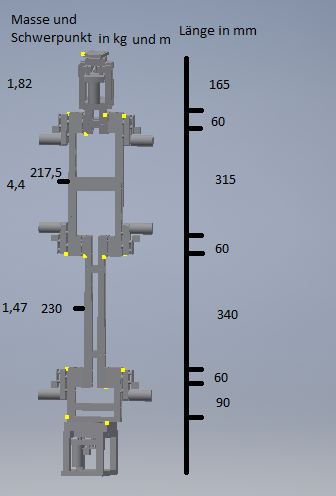
Ich habe jetzt das Ganze in Paint gemacht. Könnte man bestimmt sauber im Inventor machen, aber mit dem haben wir nur mal ganz kurz in der Schule gearbeitet und dementsprechend kenne ich mich darin nur mäßig aus. Werde den Vorschlag mit dem neuen Thread aufgreifen, aber werde die Zeichnung hier schonmal reinstellen, ob das so überhaupt das ist was du meintest, bzw ob noch Daten fehlen. Bei dem vordersten Gelenk bin ich mir bezüglich des Schwerpunkts nicht sicher, da er da ja nach vorne verschoben ist und nicht in der Mitte liegt. Wie bestimme ich den am einfachsten? Mir fällt gerade als weiterer Vorteil der Gewichte auch auf, dass ich so den Arm in beide Richtungen kippen kann und nicht nur nach vorne. Und noch kurz das Ziel des Baus: Der Arm wird auf einem ELektromobil befestigt und das Ganze dann mit einem Controller gesteuert. Dadurch soll der Arm Menschen unterstützen die auf ein Elektromobil angewiesen sind, da man leichter Gegenstände aufheben, oder aus Regalen ... nehmen kann Btw dass es bei 90% so läuft sollte doch eher nicht beruhigend sein ;) Ziel sollte es ja sein, dass es nicht so läuft, denn so verschwendet ihr ja eure Zeit und ich habe am Ende nicht mal wirklich mehr Ahnung.
:
Bearbeitet durch User
Je mehr Masse der Roboter besitzt, desto mehr Leistung müssen die Motoren aufbringen. Mögliche Lösungsansätze: - Roboter sehr leicht bauen, z. B. Gitter verwenden siehe dazu die großen Strommasten. - Getriebe vor den Motoren verbauen: Untersetzung von 1:10 vergrößert das Drehmoment entsprechend.
Moin Max, bevor ich jetzt "meinen Senf" dazu gebe, hätte ich ein paar Fragen. Es hilft ja nicht, dich mit Anforderungen zu überfahren, die du gar nicht erfüllen kannst. 1. Dein Alter bzw. die Schule. Du besuchst eine allgemeinbildende Schule? Welche Klasse? Geht einfach nur darum, ob/welche Grundlagen du schon gelernt haben könntest. Ich will also keinen Lebenslauf oder persönliche Daten. Ist aber ein Unterschied, ob du 15 oder 21 Jahre alt bist. Eine Hauptschule oder eine Fachoberschule für Elektrotechnik besuchst. 2. Der Wettbewerb, das Team, Unterstützer Bist du alleine, oder seid ihr ein Team? Wenn Team - wie habt ihr euch die Arbeit aufgeteilt? Habt ihr/du einen Betreuer? Evtl. einen Lehrer aus der Schule oder eine Firma? In welcher Sparte hast/habt du/ihr dich/euch angemeldet? Und übrigens - das Ding ist kein Elektromobil, sondern ein Rollstuhl oder Krankenfahrstuhl. Und, du/ihr seid auch nicht auf die 24V festgenagelt. Ich würde euch z.B. nicht an meinen Fahrakku lassen! und HaseKanninchen schrieb: > Je mehr Masse der Roboter besitzt, desto mehr Leistung müssen die > Motoren aufbringen. Das ist nicht ganz Falsch, aber leider auch nicht ganz Richtig. Und der Lösungsansatz recht gewagt, besonders ohne Kenntnis der Sachlage.
Ich bin 18 und besuche das "normale" Gymnasium, also nichts speziell Richtung Technik oder ähnliches (Jahrgangsstufe 2) Also Kenntnisse halt was man in Physik 4 Stündig und Mathe lernt. Plus ich hatte im letzten Jahr (wird nun nicht mehr angeboten) Informatik und NWT. Da habe ich Grundlagen in Delphi, C (Arduino) und Autodesk Inventor erlernt (erwartet nicht zuviel, denn die Lehrer konnten das am auch nie besser als die Schüler ;)) Wir sind ein 2. er Team. Wir besprechen natürlich den Großteil gemeinsam, aber der Andere kümmert sich gerade hauptsächlich um die Programmierung der Steuerung und ich mache eigentlich die ganze andere Planung ... Das Projekt wird wegen den Fördergeldern von einem Lehrer betreut, aber von dort können wir nicht wirklich Hilfe erwarten, da dieser sich nicht mit dem Thema auskennt. Wir können uns natürlich auch mal an einen Physiklehrer wenden, aber das ganze Projekt ist eigentlich selbst organisiert. Des weiteren besitzt der Vater meines Teamkameraden eine Firma die Spannfutter herstellt. dh wir können uns da Teile fräsen, bohren ... Die Kategorie in der wir angemeldet sind ist Technik. Die Fahrzeuge werden unter verschiedenen Namen verkauft. https://www.elektromobile-m.at/ So etwas meine ich. Was meinst du mit wir sind nicht auf 24V festgelegt? Also wir haben uns halt für Autobatterien entschieden, da die bereits günstig zu kaufen sind. Haben natürlich durchaus Nachteile wie den schnellen Verschleiß, oder eine weitaus geringere Kapazität aufgrund des hohen Entladestroms (gibt da ja so eine Art Scheinentladung, dass die quasi leer sind obwohl sie eigentlich noch halbvoll sind)
Ich will dir nicht zu nahetreten, aber das sind keine "Highpower Servomotoren", sondern billige DC-Motoren mit noch billigeren 08/15 Getrieben, vermutlich nicht einmal schrägverzahnt, geschweige denn halbwegs Spielfrei. Ein verlässliches Datenblatt mit Kennlinie gibt es natürlich auch nicht. Die angegebenen Drehmomente (mit den üblichen kreativen Einheiten) sind vermutlich mit den "PMPO"-Angaben früherer PC-Lautsprecher vergleichbar, werden also nur kurzzeitig erreicht. Schau dir mal echte industriell eingesetzte Servomotoren mit vergleichbaren Leistungangaben an. Meinst du, die sind zum Spaß deutlich größer und schwerer? Mit freundlichen Grüßen Thorsten Ostermann
Ich weiß habe mich damals in einem anderen Forum beraten lassen, weil ich mir nicht so sicher war bezüglich der Motorisierung des Arms. (Also au die Idee mit Gegengewichten kam ich damals überhaupt nicht, sondern der Gedanke waren halt starke Motoren. Habe daraus gelernt, dass es ziemlich dämlich ist bei den Motoren fast nur auf den Preis zu achten). Da wurden mir die empfohlen. Ich bin inzwischen auch darauf gekommen, dass die vor allem günstig sind, aber auch nicht wirklich viel mehr. Für neue Motoren bleibt aber kein Budget, daher muss ich wohl oder übel mit den bisherigen Vorlieb nehmen. Und wenn ich mit Gegengewichten arbeite sollten dann am Ende ja auch wesentlich schwächere Servos genügen. Direkt mit Gegengewichten zu planen und dann schwächere genauere Motoren wären wohl definitiv die bessere Lösung gewesen. Naja vielleicht baue ich ja mal irgendwann eine 2. Version des Arm ;) Da mache ich dann diese Fehler sicher nicht mehr.
:
Bearbeitet durch User
https://www.youtube.com/watch?v=GwRxrp4nzDA Das ist der stärkste Servo. Aber wenn die Daten stimmen, dann müsste der doch die 36Nm locker erreichen xD Naja ich habe mal noch den Verkäufer mal angeschrieben
Ich habe mir mal zu den Gewichten ein paar Gedanken gemacht und kam hierbei auf ein Problem beim untersten Gelenk. Dieses benötigt logischerweise das größte Ausgleichsgewicht. Da das Gelenk jedoch sehr weit unten sitzt (siehe Zeichnung) also nur 9cm über dem Servohorn, ist der Hebelarm für das Gewciht sehr beschränkt. Wenn ich beispielsweise ein Gewicht aus Stahl unten befestige, wird diese kaum ein Gewicht von 10kg überschreiten (da nur 6cm Breite möglich ist, und wenn man die Länge des Gewichts zu groß wählt lässt sich der Arm nur in einem sehr kleinen Radius bewegen. Ist das Gewicht jedoch 10kg und der Hebelarm im Durchschnitt maximal ca 5cm, dann wäre das Drehmoment nie über 1Nm. meine einzige Idee wäre, dass der untere Teil des Arms nur nach vorne kippen kann, denn dann könnte man das Gewicht sehr breit machen. Der Hebelarm ist allerdings dennoch extrem gering. Die Belastung für das Lager sollte allerdings kein Problem darstellen, da dieses bei einer solchen Axialbelastung statisch 6,6kN und dynamisch 11,9 kN aufnehmen kann, wären ja dann über 600kg. Ich habe das mal durchgerechnet für den Fall, als Unterstützung für die Motoren, (habe bei den Motoren mit ca der Hälfte der Kraft gerechnet) Am ersten Gelenk liegen ca 8,9 Nm an (für Greifer und Gewicht vorne habe ich noch 3kg eingerechnet). Die beiden Servos dort sollen laut Datenblatt jeweils 11Nm haben, also schaffen die das auch mit einer geringeren Kraft noch gut. Am zweiten Gelenk liegen dann 32,8 Nm an. Die Servos sollen laut Datenblatt jeweils 26Nm haben, haben aber ja nur ca 12Nm, also müssen ca 8,8Nm abgenommen werden. Am dritten Gelenk liegen dann 69Nm an. Da muss ich auf jeden Fall die Servos noch testen, denn so bräuchte ich wenn ich mit der Hälfte der Kraft rechne knapp 33 Nm durch die Gewichte. Bei einem Hebelarm von ca 5cm wären das allerdings ganze 66kg. Ich hoffe natürlich, dass die Servomotoren schonmal etwas stärker sind. Als einzige Lösung die mir einfällt ist, den Hebelarm zu vergrößern indem ich da die Profile verlängere (also nochmal Stangen darunter baue). Wobei ich den Hebelarm so auch sicher nicht über 10cm lang machen kann. Habt ihr Ideen wie man das lösen kann?
:
Bearbeitet durch User
wobei da noch nicht das Gegengewicht des 2. Gelenks eingerechnet ist
Langsam Max! hier versteht kein Mensch mehr, was du überhaupt rechnest. 10 Kg Gegengewicht geht gar nicht. Autobatterien - no go!!! Erkärung folgt. Schon mal überlegt, die Bleiakkus als Gegengewicht zu nehmen? Ist zwar auch Pfusch, aber besser als Stahlklötze gegen Designfehler. Das Gesamtgewicht wird irgendwann sehr wichtig. So ein Rollstuhl hat nur 130 bis 150 kg Zuladung. Wenn du da neben zwei Autobatterieen und 50 kg Gegengewicht noch einen fetten Behinderten unterbringen willst, brauchst du einen Anhänger. Prügele mich aber gerade noch mit einem Wärmeübergang. Hoffe aber, daß es dieses mal funktioniert. Dann bin ich gleich zurück... Vielleicht googlest du inzwischen mal "technische Zeichnung" und schaust dir ein paar Bilder an...nur so als Hinweis...
Ich weiß, aber mein Problem ist, dass ich mich mit CAD nicht gut genug aus. Also ich bekomme es nicht hin die Baugruppe von den richtigen Seiten da abzubilden. Also ich bekomme das immer nur irgendwie krumm hin. Werde das aber nochmal schön zeichnen. Wie meinst du das mit der AUtobatterie für das Gegengewicht?
:
Bearbeitet durch User
Nur kurze Pause... das Teil bringt mich noch um den Verstand... wer hat sich denn so einen Mist ausgedacht?... Was-ich?... Na das erklärt einiges... Sorry, das mußte ich gerade noch klären. CAD bedeutet Computer gestützte Konstruktion. Das ist sehr viel mehr als nur Zeichnen. PDM, PLM... das geht da weiter....FEM etc. etc. Inventor ist ein buntes, übel schwieriges und nicht leistungsfähiges möchtegern-3D-Tool. Ein Abklatsch von AutoCAD. Ein Malprogramm für Architekten... Moderne Technik sieht anders aus. Eine Technische Zeichnung ist 2D! Nimm einen Bleistift/Kugelschreiber/Tuschestift... ein Lineal und ein Blatt Papier. Und los gehts. "Die Zeichnung ist die Schrift des Ingenieurs". Mach wenigstens einen Pfeil an deine Maßzahlen, damit man weiß, was die bedeuten sollen. Du bist hier in einem Forum für Ingenieure (Formalqualifikation ist unwichtig)und Trolle. Du bist keine 15 mehr und besuchst auch keine Mittelstufe. Also "gib Schnuller, Puppe" Übrigens - es gibt keine Probleme! Es gibt nur Herausforderungen und die haben einen klaren Sieger - Dich!!! Sorry - Bist du noch da? Können wir weitermachen?
Ja ich bin noch da Dann werde ich mich wohl auch mal in autocad einarbeiten. Habe ich mir eh damals mit runtergeladen, nur haben wir dann in der Schule nur am Inventor "rumgebastelt". Die Zeichnung kann ich morgen abend machen, denn heute reicht es vermutlich nicht mehr
:
Bearbeitet durch User
Gasdruckfeder? Denk mal dran wie leicht sich eine schwere Heckklappe öffnen und schliessen lässt.
ASinus schrieb: > Nimm einen Bleistift/Kugelschreiber/Tuschestift... ein Lineal und ein > Blatt Papier. Und los gehts. Vergiss es, der TO will nur rum spielen mit seinen Tools, statt sich mit seiner Konstruktion zu befassen. Außerdem wird im Forum kein ganzes Projekt unterstützt, weil das viel zu aufwändig ist. Der TO muss eben begreifen, dass er mit dem Projekt überfordert ist. Kleinigkeiten gehen schon mal hier, aber nicht mehr. Soll halt Koch werden, oder sonst was, aber nicht Konstrukteur.
Simples Online-Tool zur Berechnung: https://www.gasfedershop.de/gasfeder_berechnung/ Passende Feder, von 30-200N: http://www.ebay.de/itm/MINI-17CM-Gasfeder-Gasdruckfeder-Kompressionsfeder-Klappenbeschlag-SILBER-/171299935740
Ich habe heute morgen von Schunk die Zusage erhalten, dass ich von ihnen einen Zwei Backen Greifer zur Verfügung gestellt bekomme. Auf Grundlage dieses Gewichts habe ich nochmal die Drehmomente durchgerechnet, da der Greifer weniger wiegt, als erwartet. Hierbei kam ich zu dem Ergebnis, dass die ersten beiden Gelenke kein Problem darstellen, auch wenn die Servos nur 50% der Kraft besitzen. Das Drehmoment am 3. Gelenk beträgt 52,4 Nm während hier die Servos laut Datenblatt 70,6Nm besitzen sollen. Bevor ihr mir hier jedoch helfen könnt werde ich erst prüfen müssen wie viel Kraft die Servos wirklich besitzen, denn sonst ist das nur eine Zeitverschwendung. Allerdings würde mich interessieren was du bei den Autobatterien meinst ASinus. Also ich weiß, dass die nicht zyklenfest sind, sich bei einer hohen Stromstärke nicht vollständig entladen lassen (scheint nur leer) und die Spannung nicht konstant ist. Unter Umständen werde ich auf zyklenfeste Batterien umsteigen, da diese zumindest langlebiger sind. Die anderen beiden Punkte werden hierdurch jedoch nicht verbessert.
:
Bearbeitet durch User
Cyborg schrieb: > Vergiss es, der TO will nur rum spielen mit seinen Tools, statt sich > mit seiner Konstruktion zu befassen. Irgendwie werde ich das Gefühl nicht los, daß ich dir -Cyborg- leider schon wieder zustimmen muß. Die Bezeichnungen wie "Beratungsresisttent" scheinen ja wirklich zutreffend zu sein. Cyborg schrieb: > Soll halt Koch werden, oder sonst was... Nicht die Köche beleidigen! Lehrer an seiner Schule, wäre vielleicht etwas. Die haben ihm diese Arbeitsweise ja auch beigebracht. Lieber Max, ich finde es toll, daß der Greifer leichter ist, als der Pfarrer geglaubt hat. Wenn ich mich nicht irre, wolltet ihr aber auch Gegenstände anheben... Heliumballons? Bei den Batterien sind mir Zustände wie "voll, scheint nur leer" nicht bekannt. Auch ist es nicht einfach "kein Geld für andere Batterieen" mit "Unter Umständen ... umsteigen" zusammenzubringen. Von deiner Variabilität bei allen anderen Konstanten rede ich dabei noch nicht mal. Ich bin mir auch nicht so sicher, ob ich jetzt meine Zeit investieren sollte um dir meine Erfahrungen mit Bleiakkus oder gekoppelten Gelenksystemen mitzuteilen, wenn dich schon konstruktive Grundlagen nicht interessieren. Ich bin also stark geneigt, der Empfehlung Cyborgs in den ersten beiden Worten seines Posts vom 03.01.2017 23:35 zu folgen. Es liegt an dir, mich vom Gegenteil zu überzeugen. Lieben Gruß ASinus
Der Greifer kann 200g heben welche schon eingerechnet sind. Die Batterien sind noch nicht gekauft, daher ist dort ein umsteigen möglich wenn sich die Kosten dadurch nicht enorm erhöhen (Kosten für die Autobatterien liegen bei knapp 120€) SOlarbatterien sind vertretbar teurer, lipos beispielsweise nicht. Bezüglich dem scheinbar leer habe ich mal einen Artikel gelesen (finde ich gerade nicht mehr). Scheinbar lässt sich die Batterie wenn man dauerhaft mit hohen Strömen arbeitet nicht ganz entladen, also sie ist dann quasi schneller leer. Wartet man dann ein paar Stunden lässt sie sich jedoch wieder nutzen. Welche konstruktive Grundlage interessiert mich denn nicht? Ich bin auf dem Gebiet Neuling und wenn der eine schreibt Gegengewichte sind gut, der nächste wiederum schreibt Federn wären besser, dann bin ich vielleicht verwirrt, aber das ist meiner Meinung keine Beratungsresistenz. Ich habe nunmal bereits mit dem Bau begonnen und auch wenn ich hierbeit einige Fehler in der Planung gemacht habe ist in die Tonne werfen und neu beginnen nunmal keine Option.
:
Bearbeitet durch User
Generelle Anmerkung: immer wenn Federn ins Spiel kommen, muss gut überlegt werden welche Eigendynamik das System entwickelt. Wenn die Sensoren und Aktuatoren durch elastische Elemente gekoppelt werden, dann kommt es zu Phasenverlusten von Ein- und Ausgangssinal und zu Eigenschwingungen, die durch die Regelung im ungünstigen Fall verstärkt werden können.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.