Hallo, für einen Vorschubschlitten (Querschlitten Drehmaschine) existiert ein Antrieb. Problem ist, das sich Motorgeräusche (die Niederfrequenten) auf das Ergebnis übertragen. Angangs war ein kreischender 12V (60u/min von Pollin) verbaut. Das gekreische hat man der Oberfläche wenig angesehen, jedoch nervt dem Bearbeiter (mich) der Ton und die maximale Verfahrgeschwindigkeit (Eilgang) war mir auch zu niedrig. So bastelte ich einen Wischermotor mit vorgeschalteten 1:6 Getriebe davor. Alles schön mit Puffern entkoppelt. Und nun Nervt zwar kein Getriebekreischen mehr, doch der brummige Motorsound überträgt sich auf die Mechanik, zwar schwach aber schlimmer als beim Vorgänger. Mein allererster Gedanke war eine Schrittmotorsteuerung, doch die Rastung würde "auffallen". Dann habe ich Gestern etwas versucht. Ich habe einen Atmega8 direkt mit einem l298 Verbunden. Also 6 Pins. 4 Geben die Spulenbestromung vor (Quadranten) und zwei (Enable A und ENable B) die PWM. 12 Stunden später lief das ganze sogar FAST wie im Traum. Ich unterteile einen Vollschritt in 50 Mikroschritte. Er (NEMA17) ist verhältnismäßig leise und hat auch beim langsamen Drehen viel Kraft, wie gewünscht. Nun gibt es aber Hänger, in denen -so denke ich- der L298 so gut wie nix macht an einer Halbbrücke. Das PWM Signal geht von 0%-100%, der L298 scheint aber erst mit 15% PWM anfangen zu laufen. Jetzt habe ich die Sinus/Cosinus-Tabelle angepasst, das die PWM bei 15% losgeht. Leider war das nicht alles. Immer noch pro Vollschritt einen hänger/raster. Bei hoher Drehzahl gibts dann Brummen und bei niedriger Drehzahl dieser ungleichmäßige Lauf, beides nicht so toll ); So nun meine eigendliche Frage: Wie kriege ich den Schrittmotor, bzw. -treiber. Nahezu geräuschlos ?(ich meine nicht das PWM-Fiepen, sondern NUR den Lauf) Mit dem L298 klappt das schon gut bis auf dieser "hänger". Hat das schon mal jemand mit Erfolg gemacht? Bevor ich es vergesse: Basteln will ich, wenn mir dieser Antrieb bereits hunderte Stunden gekostet hat, will ich trotzdem kein Geld ausgeben. OK für einen -preiswerten- Treiberbaustein, der das kann schon. Und zu guter Letzt: Die ganze Problematik kann ich erschlagen, in dem ich die jetzige Situation nutze, und den Microstepper (: mit einem Riemengetriebe akustisch auskopple, doch dazu müsst die Maschine räumlich erweitern und das soll meine letzte Option sein. MfG Robert
RobertVortex schrieb: > Angangs war ein kreischender 12V (60u/min von Pollin) verbaut. Was ist ein 12V? RobertVortex schrieb: > Mit dem L298 klappt das schon gut bis auf dieser "hänger". L298 ist ungeeignet. Mein Vorschlag A4982 oder ähnlich mit 16 Mikroschritten. Der reicht für NEMA17.
Hast du schon mit verschiedenen Kupplungen und Schwungmassen experimentiert? Erstaunlicherweise eignet sich Gartenschlauch als elastische Kupplung. http://www.jensn.de/cms/cnc21.JPG Uns sei nicht ganz so geizig. Mit einem chinesischem Speicheroszilloskop findest du die Programmfehler sofort.
m.n. schrieb: > Mein Vorschlag A4982 Oder gleich den DRV8825, kann 32 Mikroschritte und ist auch nicht teurer: http://www.ebay.de/itm/DRV8825-3D-Drucker-Stepstick-Schrittmotor-Treiber-Modul-alternative-zu-A4988-/331641576509
Ich meinte einen 12V Getriebemotor. Der A4982 hat 16 Schritte, der DRV8825 wohl auch nur 32. Meiner hat jetzt 200 (jedoch ist die Sinustabelle an manchen Stellen nicht ausreichend aufgelöst)! Es ist wirklich kaum ein Schritt zu erkennen, nur halt wenn sich einer der Sinus' Null nähert. Und ich wills am besten Schrittlos. Ich kann auch nur die PWM im 2-Kanalbetrieb (Analogoszi) prüfen, ansonsten wegen gemeinsamer Masse nur einen Spulenstrang und dort sieht man, das der L298 die einzelnen kürzeren PWM-Signale nicht nicht weiterleiten WILL. Mit zwei Diskret aufgebauten Halbbrücken sollte das doch auch gehen, oder ? MfG
> So bastelte ich einen Wischermotor > nur einen Spulenstrang Nanu? Willst du einen Gleichstom-Getriebemotor mit PWM ansteuern? Oder ist das ein Schrittmotor mit angeflanschtem Getriebe? Und um welche Frequenzen geht es? Sind es kHz oder baust du den Sinus aus MHz Impulsen zusammen?
RobertVortex schrieb: > Der A4982 hat 16 Schritte, der DRV8825 wohl auch nur 32. Meiner hat > jetzt 200 Dein was hat 200? Ein Schrittmotor mit 200 Schritten pro Umdrehung löst mit einem 32er Mikroschritttreiber 6400 Schritten auf, also etwa 0.05°/Schritt. Da musst du schon sehr genau hingucken, um noch Schritte zu erkennen. Von Trinamic gibt es den TMC2100 mit max 256 Mikroschritten.
Sorry... hab mich falsch ausgedrückt, vielleicht suche ich gar keine Microstep. Ich versuche den Schrittmotor mit zwei um 90° Versetzten Sinus zu Steuern. Der Sinus sollte mit einer 12khz PWM erzeugt werden. Das will ich, um einen geräuschlosen, drehmomentstarken und positionierbaren Antriebsmotor zu haben. Theoretisch habe ich 200 Sinuswerten (PWM). Das entspicht einem Schritt, wovon der Schrittmotor 200 hat. Ich kann (theoretisch) bis aufs vierzigtausendstel einer Gesamtundrehung auflösen. Bei meinen Versuchen habe ich einen Zeiger an dem Schrittmotor montiert, solche -nicht erwünschten- Schritte sichtbar zu machen. Denn wenn ich ihn schneller rotieren lasse, machen sich die kleinen Hänger schon bemerkbar. Das ganze Konstrukt dient der Oberflächenbearbeitung und eine Drehzahl von 5 u/min (besser auch kleiner) bis >20 U/min ist vorraussetzung, wobei letzteres sich auch Wunsch ist.
RobertVortex schrieb: > Sorry... hab mich falsch ausgedrückt, vielleicht suche ich gar keine > Microstep. Ich versuche den Schrittmotor mit zwei um 90° Versetzten > Sinus zu Steuern. Der Sinus sollte mit einer 12khz PWM erzeugt werden. > Das will ich, um einen geräuschlosen, drehmomentstarken und > positionierbaren Antriebsmotor zu haben. Theoretisch habe ich 200 > Sinuswerten (PWM). So wie du das beschreibst, hört sich das nach effektiv 200 Mikroschrittansteuerung an. Ist dein Motor für Mikroschrittbetrieb konstruiert, sonst kann es leicht zu ungleichmäßigen Schritten kommen. Resonanzen sind ein anderes Problem. Testest du mit Last?
Einen Schrittmotor kannst du gar nicht auf einen Mikroschritt positionieren. Wenn der Strom langsam ansteigt, passiert erst mal gar nichts. Sobald der Strom das Haltemoment überwindet, springt er zur nächsten stabilen Position. http://www.schrittmotor-blog.de/die-bedeutung-des-lastwinkels-bei-schrittmotoren/ Aus diesem Grund benutzen Werkzeugmaschinen die teuren geregelten BLDC Motoren. Und dann hast du noch das Problem: Bei höheren Drehzahlen nehmen Strom und Drehmoment ab. Du musst den Motor mit geregeltem Strom betreiben, nicht mit konstanter Spannung. Da sind 40 Volt für 3 Volt Nennspannung üblich. Ohne Stromregelung brennen die sofort durch. Die beste Strategie: Zuerst Strom, Elastizität und Schwungmassen aufeinander abstimmen, dass er auch bei Halbschritt sauber läuft. Danach mit Mikroschritt die verbleibenden Schwingungen ein wenig dämpfen.
Ob mein Schrittmotor Mikroschritt tauglich ist weiß ich gar nicht ): Aber es sieht soweit ganz gut aus. Und wie gesagt ich versuche ja über die H-Brücken (l289) mit PWM einen Sinus und Cosinus zu erzeugen, welche dann den Drehwinkel des Ankers vorgeben. Und ich kann den Schrittmotor wirklich extrem langsam bewegen und dabei kann ich einen Drehmoment vernehmen, wie er für meine Zwecke ausreicht. ich seh mir mal den l292 an. edit: zu dem Link... das der tatsächliche Drehwinkel, vom äußeren Drehmoment abhängt ist mir klar. Momentan ist der Motor Lastlos nur mit einem Zeiger auf dem Werktisch.
:
Bearbeitet durch User
Robert V. schrieb: > ich seh mir mal den l292 an. Da wirst Du ins Museum gehen müssen. Robert V. schrieb: > Ob mein Schrittmotor Mikroschritt tauglich ist weiß ich gar nicht ): Er ist er sehr wahrscheinlich nicht. Da kannst Du noch so viel Mikroschritte vorgeben, an seinem Rastmoment kommst Du nicht vorbei. RobertVortex schrieb: > Das ganze Konstrukt dient der Oberflächenbearbeitung und eine Drehzahl > von 5 u/min (besser auch kleiner) bis >20 U/min ist vorraussetzung, > wobei letzteres sich auch Wunsch ist. Das geht mit einem geregelten DC-Motor mit Getriebe ganz gut. Pollin ist da keine Referenz.
ok, dann habe ich wohl den Aufbau des Motors verkannt. Warum soll das beim BLDC gehen und beim Schrittmotor nicht ? Das Rastmoment kommt doch durch die stromUNdurchflossenen Spulen oder durch schrittweise Stromänderung. Da ich letzteres beseitigen will, woher noch? Nochmal: Meint ihr ein, mit reinem Sinus, bestromter Schrittmotor rastet?? edit: l292 ist rar, da bau ich mir dann vielleicht doch zwei H-Brücken
:
Bearbeitet durch User
Robert V. schrieb: > Nochmal: Meint ihr ein, mit reinem Sinus, bestromter Schrittmotor > rastet?? Sogar ein gänzlich unbestromter Schrittmotor rastet. Und das muss durch den Strom überwunden werden.
Angehängte Dateien:
-

vorher.jpg
8,2 KB -

nachher.jpg
7,3 KB
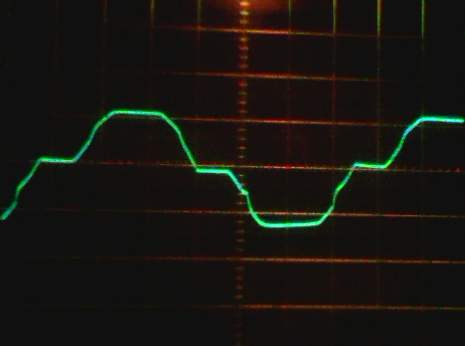
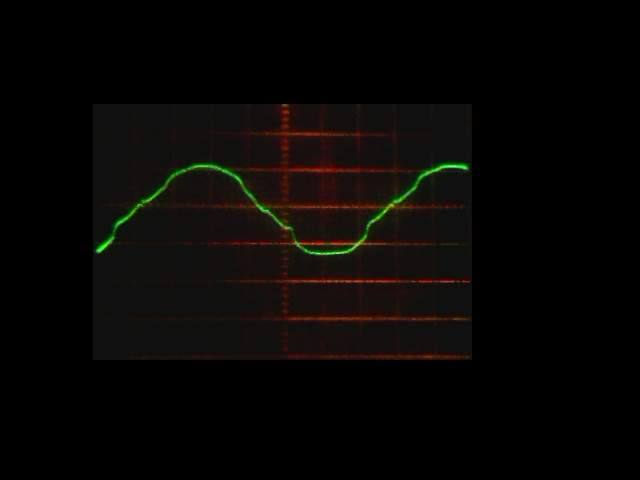
Vielleicht reden wir aneinander vorbei, aber ein Synchronmotor mit Permanentmagneten rastet stromlos, nicht wahr?! Mit einem Drehfeld bestromt (Sinusförmig) sollte er Rastfrei laufen und das theoretisch unabhängig von der Trägheit des Rotors. Nun habe ich einen Ausgang des l298 an einen Trafo angeschlossen und die Ausgangsspannung unter Last (Glühlampe) angesehen. Es sind Plateaus im Nulldurchgang und an den Scheitelwerten. Er ist also wirklich ungeeignet für einen sauberen Sinus. ...eine Option wäre noch die PWM-Tabelle des µC, mit hilfe des Oszibildes, in Rinchtung Sinus zu korrigieren edit: im Bild oben schon ein Versuch der Tabellenkorrektur edit2: es sind 120khz PWM
:
Bearbeitet durch User
Robert V. schrieb: > Vielleicht reden wir aneinander vorbei, Vermutlich. Hier im Thread wird auch ziemlich abenteuerliches Zeug ueber Schrittmotoren behauptet. > aber ein Synchronmotor mit Permanentmagneten rastet > stromlos, nicht wahr?! Sollte so sein, ja. > Mit einem Drehfeld bestromt (Sinusförmig) sollte er > Rastfrei laufen Jein. Hier fangen die Probleme an. Richtig ist, dass der Rotor des Schrittmotors jede beliebige Zwischenstellung zwischen zwei Vollschritt- positionen einnimmt, wenn Du die Wicklungsstroeme passend variierst. Einfachster Fall: Beide Wicklungen mit genau 70.7% bestromt --> Halbschritt. Falsch ist aber im Allgemeinen die Annahme, dass der elektrische Winkel der Phasenstroeme dem mechanischen Rotorwinkel genau proportional waere. Das ist normaler- weise NICHT EXAKT so! Bei 90° und 45° elektrisch haut es gerade hin, aber bei den Zwischenwinkeln klappt das nicht unbedingt. Die Ursache liegt darin, dass sich durch die Rotordrehung der magnetische Widerstand aendert und daher der Strom nicht mehr exakt proportional zur Kraft ist. Folge: Auch wenn der Schrittmotor mit genau sinus- bzw. cosinusfoermigen Stroemen bestromt wird, ist das Drehmoment NICHT zwingend exakt konstant, sondern es schwankt trotzdem noch. (Allerdings sind die Schwankungen VIEL kleiner als im einfachen Vollschrittbetrieb.) Die Abweichungen haengen mit der geometrischen Form der Polschuhe zusammen. Man muesste passend vorverzerrte Phasenstroeme verwenden, um konstantes Drehmoment zu erhalten. Robert V. schrieb: > ...eine Option wäre noch die PWM-Tabelle des µC, mit > hilfe des Oszibildes, in Rinchtung Sinus zu korrigieren Kann man machen. Dann bewegst Du Dich allmaehlich in Richtung eines echten Umrichters.
Angehängte Dateien:
-

DSC_0122.JPG
230 KB -

DSC_0080.JPG
190 KB

{kind=link}
Ich würde einen DC-Getriebemotor (Nenndrehzahl etwas höher als dein gewünschtes Maximum) mit L298 oder besser L6206 nehmen, und mit onephase chopping ansteuern. Dann einen Encoder z.b. AS5047 mit auf die Welle und damit einen PID Regler implementieren. Wenn du einen Halter für den Encoder brauchst, drucke ich dir gerne einen aus :) Gruss Chrys
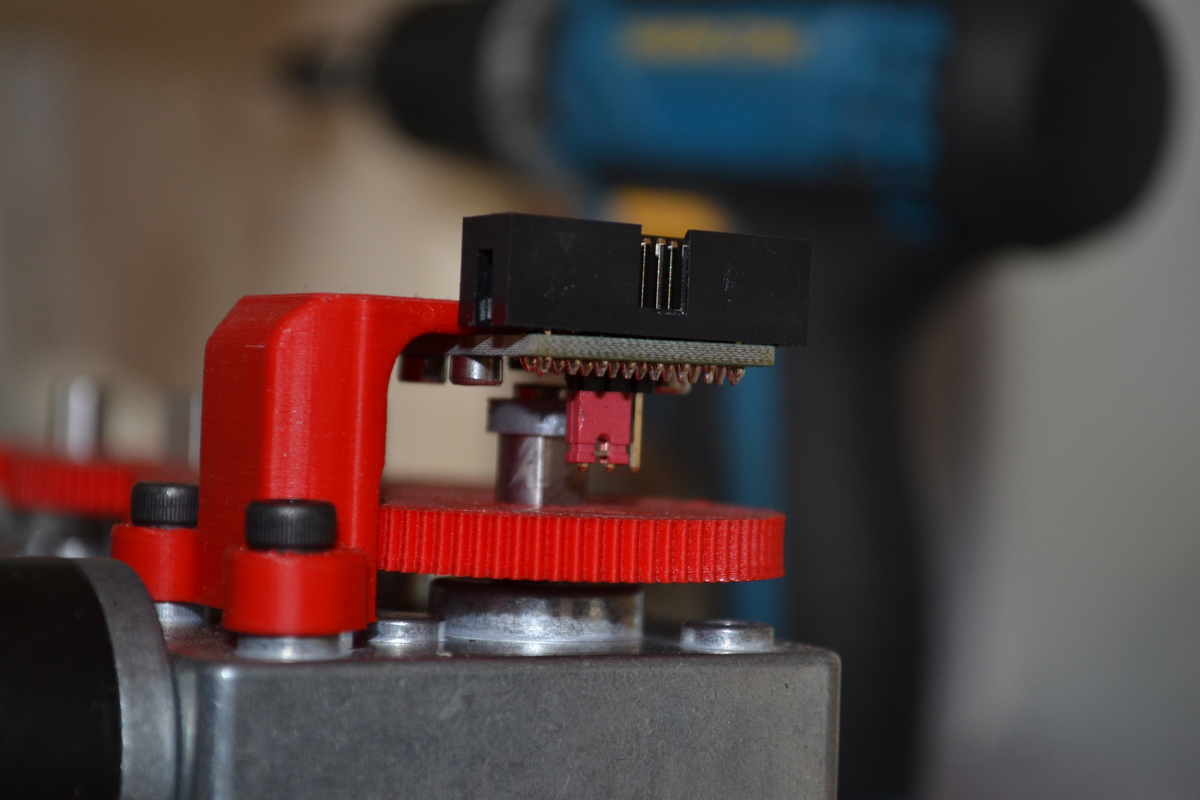
Danke das hilft schon mal weiter. OK die mechanische Konstruktion, sorgt für eine Abweichung zwischen Stromwinkel und Drehwinkel. Da kann ich wohl nicht viel machen mit den gegebenen Mitteln, es sei denn, ich würde die Sinustabelle der tatächlichen Drehrichtung anpassen. Dazu fehlen mir aber die Messmittel, denn die Auflösung ist schon extrem klein. Und danke für das Druckangebot, aber ich habe eine kleine Werkstatt, wo ich mir sogar ein kleines Getriebe fertigen könnte (wenn ich Zeit hätte). Dann werde ich heute Nacht noch mal mit dem Schrittmotor und dessen Tabelle probieren und die Tage einen passenden Getriebemotor suchen. Problem bei der Getriebevariante waren die Getriebegeräusche für den Maschinenarbeiter und Schrittmotoren lagen rum. Die Geräusche stören deswegen, weil man dann weniger Feeling für die eigendlichen Zerspangeräusche hat. Bei dem, im Bild, gezeigten Motor habe ich wieder Angst, das die Probleme des Wischermotors auftauchen. Niederfrequentes Brummen. Ich habe hier auch noch Reihenschluss- (oder Nebenschluss-?) Motore, welche ruhiger Laufen wie der Wischermotor. (Beim Wischermotor liegt das an den Permanentmagneten und der Kommutatierung). ... muss ich mir mal drüber gedanken machen.
...so mit dem l298 hatt ich immer einen kurzen Vollausschlag hinter dem Nulldurchgang. Ich habs nicht geschafft damit und mir statt dessen zwei diskrete Vollbrücken gebaut. Nun alles ohne diese Peaks. Jetzt muss ich nur noch die Sinustabellen optimieren, denn ... er macht läuft ungleichmäßig ): und somit laut. Mal sehen wie viele Stunden ich darin noch investieren will, deshalb Frage ich mal hier nach einer Empfehlung für einen Getriebemotor? Die Anforderungen wären von ca 4 u/min bis 60 u/min. Drehmoment ist halt wie bei einem Querschlitten von einer Drehe mit minimalster Zustellung. Die Spindel hat 3mm Steigung und die Vorschubgeschwindigkeit ist 1/10mm bei einer Arschlangsamen Drehzahl. Es werden große Teile "plangedreht" und es sind extrem langsame Drehzahlen -> runter bis 16u/min Mein bisheriges Problem damit war: -kleiner Getriebemotor von Pollin: kreischt und hat eine nervige Maximalgeschwindigeit -Scheibenwischermotor mit vorgeschaltetem Getriebe: Drehzahlen super, doch der Motor brummt so niederfrequent, dass man es in der Oberfläche sieht. (kann man dem Problem vielleicht über eine veränderte Kommutierung herr werden) -beim Schrittmotor habe ich bisher keine gleichmäßige langsame Bewegung zu Stande bekommen, siehe oben (hab ihn aber noch angebaut und getestet) Welchen motor kann ich nehmen ? Ich will keine 40€ ausgeben und der Abstand zum Halter ist ca 4cm (aus dem Gedächtnis). MfG
Warum meinst du eigentlich wie alle anderen Anfänger, du könntest "mal eben" selbst bauen, wofür andere lange Entwicklungsphasen brauchen? Der Teufel steckt eben im Detail. Mit einer guten fertigen Schrittmotorsteuerung würde dein Motor längst laufen. Die Probleme im Nulldurchgang werden in den Off-Phasen der Brücke verursacht. Deswegen arbeiten moderne Schrittmotortreiber mit Mixed-Decay. Mit einem L298 und einem wie auch immer gearteten, selbstgestrickten Stromregler wird man das nicht annähernd so gut hinbekommen. Mit freundlichen Grüßen Thorsten Ostermann [1] http://www.schrittmotor-blog.de/stromregler-als-ursache-fuer-positionierfehler-im-mikroschritt/
Weil es für das eigene Verständnis sinn macht Dinge von Grund an selbst
zu entwickeln. Ich mache das quasi nur als Hobby, weil man als Schlosser
elektrisch blöd sein muss. Es gibt halt Menschen die sich privat mit
Dingen auseinandersetzen, die andere Beruflich machen, damit will man ja
niemanden ans Bein pissen.
>>> Und weiter oben wurde schon geschrieben, dass es überhaupt nicht geht (:
Aber dein Link beschreibt anscheinend mein Problem, 1000 Dank. Jetzt bin
ich erneut motiviert.
MfG
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.