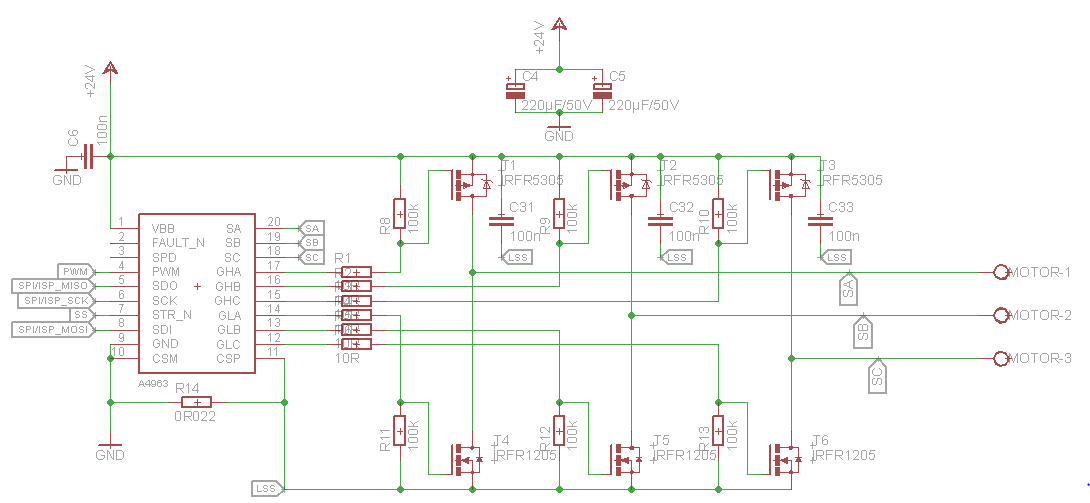
Hallo zusammen, ich habe mir quasi einen Dremel gebastelt mit einem kleinen BLDC Motor (fast keine Motordaten bekannt). Als Regler kommt hier der A4963 zum Einsatz. Funktioniert soweit alles soweit ganz gut. Nur habe ich bei niedriger Drehzahl zu wenig Kraft bzw. reagiert die Regelung nicht schnell genug auf abrupte Änderungen sodass der Motor aus dem "tritt" kommt. Mit den Parametern (PI-Regler des A4963) habe ich schon gespielt komme aber nicht zum gewünschten Ergebniss. Die Frage wäre ob es Sinn macht etwas an der Hardware zu ändern, da es möglicherweise nicht an der internen Regelung des A4963 liegt. Vielleicht sind meine verwendeten Mosfets zu träge oder die Pull-Down/UP Widertände unpassend. Die High-Side ist bestückt mit IRFR5305, die Low-Side mit IRFR1205 mit jeweils 100 kOhm Pull-Down/UP Widertand sowie an allen MOSTFETs ein 10 Ohm Gatewiderstand. Da der Motor Maximal 3 Amphere zieht, sind die verwendeten Mosfets durchaus überdimensioniert.
Reicht denn deine Spannung um den Motorstrom zu treiben?
Das Schaltnetzteil liefert 24 Volt mit 4,5 Amphere. Muss ich mal versuchen auf meinen analogen Uraltoszi irgendwie sichtbar zu machen ob die Spannung stark einbricht.
Wie wäre es denn mit einem kleinen Schaltbild (notfalls per Hand gezeichnet)?
Gert schrieb: > Nur habe ich bei niedriger > Drehzahl zu wenig Kraft bzw. reagiert die Regelung nicht schnell genug > auf abrupte Änderungen sodass der Motor aus dem "tritt" kommt. Sensorless halt.
Naja, die Regelung regelt ja. Wenn ich den Motor sanft bremse, merke ich wie die Kraft erhöht wird. Wenn er allerdings etwas ruppiger gebremst wird ist die Reaktion zu langsam. Das ein BLDC Motor dadurch aus dem Konzept gebracht wird ist mir klar. Nur würde ich es gerne etwas optimieren.
hinz (Gast) schrieb: >Gert schrieb: >> Nur habe ich bei niedriger >> Drehzahl zu wenig Kraft bzw. reagiert die Regelung nicht schnell genug >> auf abrupte Änderungen sodass der Motor aus dem "tritt" kommt. >Sensorless halt. Denke ich auch. Da es keine echte Sensoren zur Positionserkennung gibt, muß der IC immer eine Phase als "Sensor" benutzen (EMK). Wenn die Drehzahl zu gering wird, ist auch die EMK zu gering, und der Motor kommt leicht aus dem Tritt, weil eben die Synchronisation dann versagt. Mit irgendwelchen Widerständen oder Mosfet-Eigenheiten hat das ganze nix zu tun.
Gert (Gast) schrieb: >Naja, die Regelung regelt ja. Wenn ich den Motor sanft bremse, merke ich >wie die Kraft erhöht wird. Wenn er allerdings etwas ruppiger gebremst >wird ist die Reaktion zu langsam. Das ein BLDC Motor dadurch aus dem >Konzept gebracht wird ist mir klar. Nur würde ich es gerne etwas >optimieren. Also ich würde als erstes mal die Speed-Regelung deaktivieren (sollte ja gehen, wenn ich das Datenblatt richtig überflogen habe), und die plötzlichen Laständerungen mal damit testen.
:
Bearbeitet durch User
Hallo Jens, was kann ich mir dadurch erhoffen? Im Moment betreibe ich den A4963 im "Closed-Loop Speed Control"-Modus. Wenn ich auf "Direct-Open-Loop Speed Control" gehe, ist die Regelung inaktiv. Die Drehzahl wird dann alleine über die zugeführte PWM bestimmt und ist dann Lastabhängig.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.