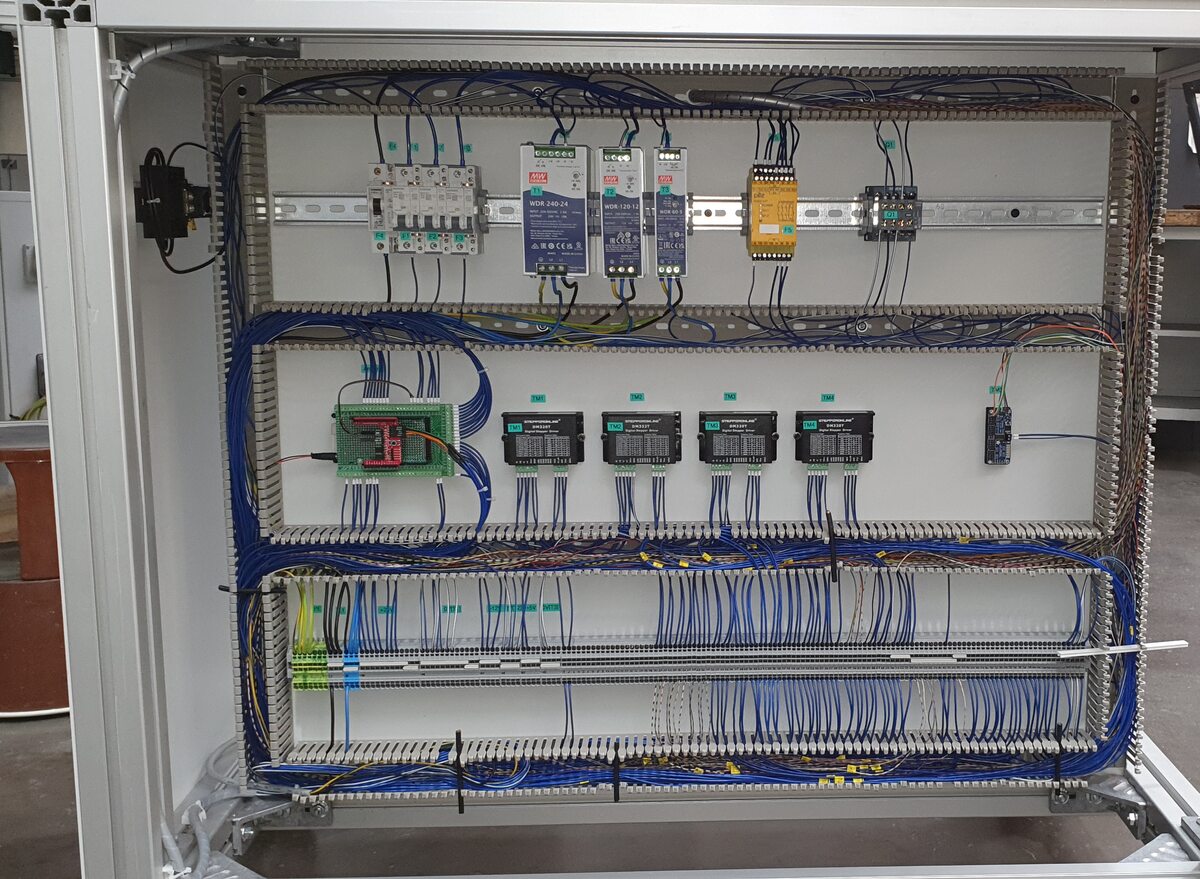
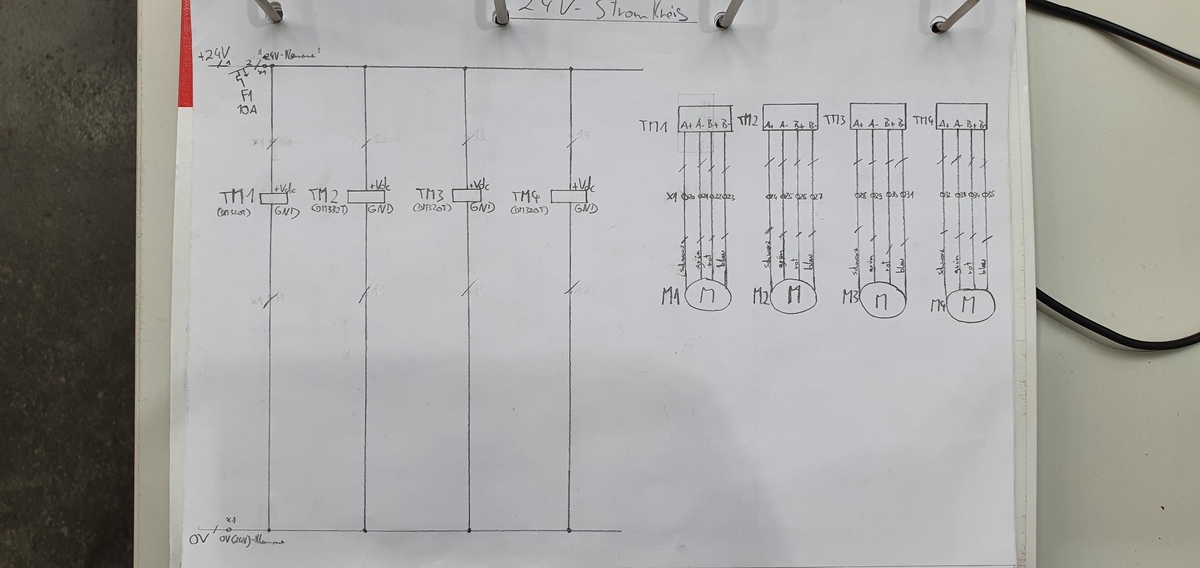

Hallo miteinander Ich baue gerade einen Roboterarm, der mit 4 Schrittmotoren und einem Servo betrieben und durch einen Arduino Mega R3 gesteuert wird, jedes Gelenk hat 2 Endlagenschalter. Alles ist soweit fertig gebaut und verdrahtet, allerdings bekomme ich jetzt, wenn ich einen oder mehrere Schrittmotoren ansteuere, an meinen Inputs der Endlagen willkürlich und sehr schnell wechselnd 0 & 1 Zustände (am seriellen Monitor ausgelesen), egal ob der Endlagenschalter betätigt ist oder nicht. Ich nutze für alle 10 Endlagen sowie für den NotAus INPUT_PULLUP. Ich habe festgestellt, dass der Fehler verschwindet, wenn ich alle Schrittmotoren von den Treibern abklemme (separaten Schrittmotor zum Testen an einen verbauten Treiber angeschlossen, alle anderen Motoren abgeklemmt --> Input spinnt nicht mehr). Also muss das Problem wohl mit den Treibern bzw Schrittmotoren zusammenhängen. Evtl ein elektrisches Feld von den Motorleitungen, das eine Spannung in die Leitungen der Endlagen induziert und so für den Fehler sorgt. Allerdings müsste doch ein Pullup-Widerstand so etwas verhindern. Einen externen Pullup hab ich auch schon getestet, auch einen niedrigen mit 1k, ohne Erfolg. Wenn ich die Endlage am Roboterarm überbrücke und die Leitung vom Inputpin des Arduino direkt zur GND-Klemme lege, habe ich Keine Störungen mehr. Außerdem ist es unerheblich, ob sich der Schrittmotor bewegt oder nur hält, in beiden Fällen spinnt der Input. Kriegen die Spulen beim Halten nicht einfach eine Gleichspannung oder bekommt der Schrittmotor auch beim Halten ein PWM-Signal, das Spannung induzieren könnte? Hattet ihr schon einmal ein derartiges Problem oder habt ich irgendwelche Vermutungen/Erklärungen/Lösungsansätze? (Ich habe noch zusätzlich alle 0V (von 24V, 12V und 5V) sowie GND des Arduino auf PE gelegt, ist noch nicht im Schaltplan ergänzt) Ich wäre Dankbar für jede Hilfe! Komponenten: Arduino Mega https://www.omc-stepperonline.com/de/digitaler-schrittmotortreiber-0-3-2-2a-10-30vdc-fuer-nema-8-11-14-16-17-schrittmotore-dm320t https://www.omc-stepperonline.com/de/digitaler-schrittmotortreiber-1-0-3-2a-18-30vdc-fuer-nema-17-23-schrittmotore-dm332t https://www.omc-stepperonline.com/de/nema-17-doppelte-welle-schrittmotor-l-39mm-uebersetzungsverhaeltnis-50-1-hohe-praezision-planetengetriebe-9-5mm-laenge-der-hinteren-welle-17hs15-1684d-hg50-ar3 https://www.omc-stepperonline.com/de/nema-14-doppelte-welle-schrittmotor-bipolar-l-28mm-w-uebersetzungsverhaeltnis-19-1-planetengetriebe-9-5mm-laenge-der-hinteren-welle-14hs11-1004d-pg19-ar3 https://www.omc-stepperonline.com/de/nema-23-doppelte-welle-schrittmotor-l-56mm-uebersetzungsverhaeltnis-50-1-hohe-praezision-planetengetriebe-9-5mm-laenge-der-hinteren-welle-23hs22-2804d-hg50-ar3
Angehängte Dateien:
-

20220401_143050.jpg
240 KB -

20220412_100118.jpg
230 KB -

20220412_100130.jpg
200 KB -

20220412_100134.jpg
200 KB -

20220412_100137.jpg
220 KB -

20220412_100141.jpg
210 KB -

20220401_143152.jpg
240 KB
In der Industrie benutzt man Optokoppler, um die empfindlichen CPU-Eingänge von der störverseuchten Umgebung zu trennen. Und vermutlich benutzt Du Flankeninterrupts zur Abfrage der Eingänge, die besonders störempfindlich sind.
Der interne Pull-Up Widerstand ist recht hochohmig (ca 50kΩ). Das taugt nur für Kontakte die sich aus der selben Platine befinden. Und das auch nur dann, wenn keine starken elektromagentischen Felder (z.B. ein Motor oder Funkmodul) in der Nähe sind. Bedenke: Jede Leitung ist eine Antenne. Du brauchst auf jeden Fall viel stärkere Widerstände, zum beispiel 2,2kΩ. Beachte dabei auch, dass Schaltkontakte meistens einen gewissen mindest-Strom brauchen, um langfristig funktionsfähig zu bleiben. Bei zu wenig Strom fallen sie frühzeitig aus. Ganz ohne mindest-Strom arbeiten nach keinem Kenntnisstand nur Schutzgaskontakte (Reed Relais), Kontakte aus Gold und die Gummikontakte von Tastaturen/Fernbedienungen.
Max M. schrieb: > Alles ist soweit fertig gebaut und verdrahtet, allerdings bekomme ich > jetzt, wenn ich einen oder mehrere Schrittmotoren ansteuere, an meinen > Inputs der Endlagen willkürlich und sehr schnell wechselnd 0 & 1 > Zustände (am seriellen Monitor ausgelesen), egal ob der Endlagenschalter > betätigt ist oder nicht. > Ich nutze für alle 10 Endlagen sowie für den NotAus INPUT_PULLUP. Verstehe ich die Bilder richtig: kilometerlange unabgeschirmte Leitungen direkt an einem armen Prozessoreingang mit einem simplen internen Pullup?
Max M. schrieb: > Ich nutze für alle 10 Endlagen sowie für den NotAus INPUT_PULLUP. Du bist naiv. Mit Steckbrettmentalität einen Schaltschrank aufbauen. Naja. In einer derartigen Steuerung braucht man DRINGEND - niederohmigen Pull-Up (3-10k bei 5V) - RC Filter DICHT am Arduino https://www.mikrocontroller.net/articles/Entprellung#Einfacher_Taster Wenn man noch sicherer und robuster werden will/muss, nimmt man Optokoppler an den Eingängen, die sind dann auch meist auf 24V ausgelegt. Aber auch dort braucht es a) Schutzdioden und b) passende Filter vor oder nach dem Optokoppler, damit nicht jeder HF-Dreck reinspuckt.
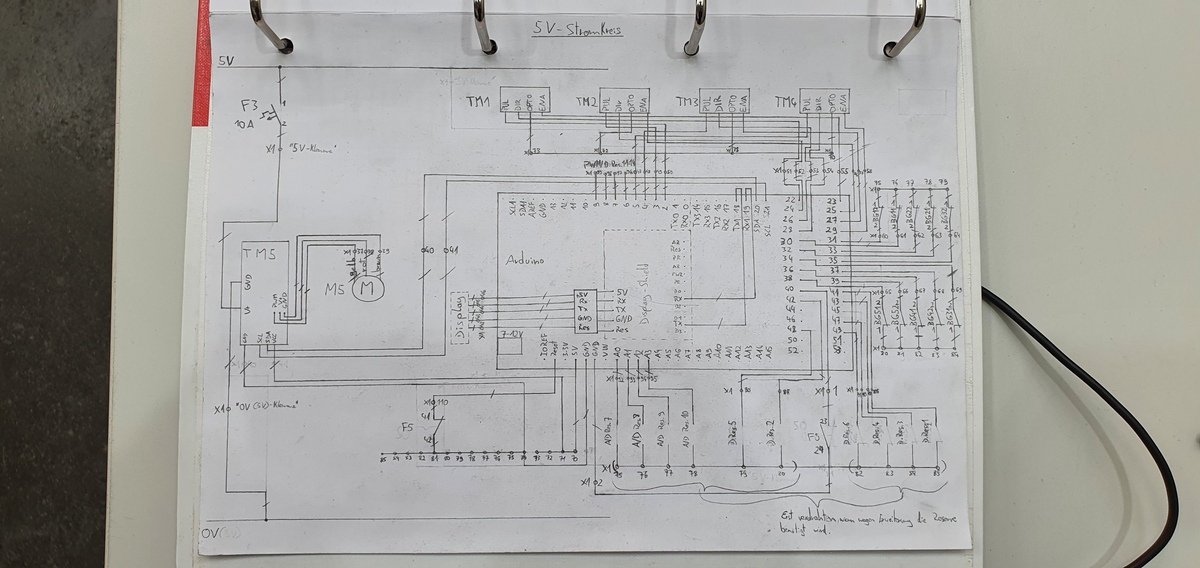
Ich weis nicht, so wie du deine Schaltpläne präsentierst, mit Bleistift gezeichnet und dann noch drüber radiert (...118.Jpg) Das ist Stand wie vor 40 Jahren :-( Das Ganze sieht irgendwie nach Diplom / oder Doktorarbeit aus. Ob man damit einen Topf gewinnt - ich weiß nicht. Bring das Ganze mit einen CAD-System auf Vordermann. Ansonsten halte dich an die Vorschläge von Falk B.(falk)
Rotringvertreter schrieb: > Ich weis nicht, so wie du deine Schaltpläne präsentierst, mit Bleistift > gezeichnet und dann noch drüber radiert (...118.Jpg) > Das ist Stand wie vor 40 Jahren :-( Na und, magst du klassische Kunst nicht? Andere Zeichnen gar keine Pläne oder erfinden ihre eigenen Symbole. Hier immer wieder zu sehen sind auch Schnipsel die jeweils nur ein Bauteil enthalten und irgendwie über Netz-Namen miteinander verbunden sind. Da kann man den Plan gleich durch eine Excel Tabelle ersetzen. > Ob man damit einen Topf gewinnt - ich weiß nicht. Also ich finde es völlig OK. Wetten diese Unterlagen werden länger verfügbar und lesbar sein, als elektronische?
Stefan ⛄ F. schrieb: > Also ich finde es völlig OK. Wetten diese Unterlagen werden länger > verfügbar und lesbar sein, als elektronische? Irgendwie scheinst du den alten Zeiten nachzutrauern. Lass mal schätzen: du bist bestimmt schon weit über die 80. Es geht da nicht unbedingt darum wie lange Unterlagen zur Verfügung stehen, sondern auch darum wie man mit heutigen "Werkzeugen" so ein Projekt rational angeht.
Max M. schrieb: > Einen externen Pullup hab ich auch schon getestet, auch > einen niedrigen mit 1k, ohne Erfolg. Natürlich wurde wieder ein einfacher Satz nicht verstanden: Stefan ⛄ F. schrieb: > Du brauchst auf jeden Fall viel stärkere Widerstände, zum beispiel > 2,2kΩ. Beachte dabei auch, dass Schaltkontakte meistens einen gewissen > mindest-Strom brauchen, um langfristig funktionsfähig zu bleiben. Bei zu > wenig Strom fallen sie frühzeitig aus. Falk B. schrieb: > Du bist naiv. Mit Steckbrettmentalität einen Schaltschrank aufbauen. > Naja. In einer derartigen Steuerung braucht man DRINGEND > > - niederohmigen Pull-Up (3-10k bei 5V) ######################################################################## ### @TO Du musst EINEN zentralen Punkt für GND haben. An dem (und NUR an dem) werden die GND der verscheidenen Schaltungsteile verbunden. Sonst ergibt das Schalten der Servos etc. Störspannungen auf GND, die der Kontroller mit Kopfkratzen beantwortet.
Beitrag #7032390 wurde von einem Moderator gelöscht.
Noch was. Viele Anfänger und Starkstromer scheinen die Bedeutung des Worts StromKREIS nicht zu verstehen. Sowohl in deinen Schaltplänen als auch in der realen Verdrahtung sind immer nur die Signalleitungen an den Arduino geführt. Masse gibt es bestenfalls als "Kuhschwanz" lieblos zum Controller geführt. Bei GLeichspannung mag das OK sein, sobald aber Wechselspannungen ins Spiel kommen, und da reichen oft die lausigen 50Hz, spielt die Leiterschleife zwischen Signal und Masse eine entscheidende Rolle. Dort fängt man sich MASSIV Störungen ein bzw. produziert sie (induktive Kopplung). Als Abhilfe KÖNNTE man alle Signale als verdrillte Leitungen führen und auch Masse für jedes Signal am Arduino anschließen. Macht aber keiner im Schaltschrankbau, zuviel Kabel und Klemmen. Noch krasser wäre die Verwendung von Koaxialkabel ;-) Ergo. Wenn man denn schon im Schaltschrank-Stil verdrahten will/muss, muss man auch dementsprechend die Eingangssignale maximal filtern und die Filterbandbreite soweit minimieren, daß die Nutzsignale noch schnell genug durchkommen. Für einfache Endlagenschalter und ähnliches ist das einfach, für WIRKLICH schnelle Signale deutlich schwerer bis unmöglich. Dort muss man dann auf verdrillte Leitungen, ggf. sogar mit Schirm, zurückgreifen.
Rotringvertreter schrieb im Beitrag #7032390: > Ja ich weiß, das sind die "Vollprofis" die euch "Berater" auf Trab > halten bzw. euren Rentnerdasein einen Sinn geben. Du weißt gar nichts! Dieser Satz enthält vier nicht zutreffende Aussagen.
Input, Output, Kaputt schrieb: >> Einen externen Pullup hab ich auch schon getestet, auch >> einen niedrigen mit 1k, ohne Erfolg. > Natürlich wurde wieder ein einfacher Satz nicht verstanden Kritik angenommen.
Ich nehme mal an, daß das grüne Ding Mitte links der Arduino ist. DORT müssen die RC-Filter und Pull-Ups drauf!
Max M. schrieb: > Einen externen Pullup hab ich auch schon getestet, auch > einen niedrigen mit 1k, ohne Erfolg. 1k ist Holz im Vergleich zu hochfrequenten, induzierten Spannungen. 100nF (RC-Filter) dagegen sind nahezu ein Kurzschluss für HF. > Außerdem ist es unerheblich, ob sich der Schrittmotor bewegt oder nur > hält, in beiden Fällen spinnt der Input. Kriegen die Spulen beim Halten > nicht einfach eine Gleichspannung Nö. > oder bekommt der Schrittmotor auch > beim Halten ein PWM-Signal, das Spannung induzieren könnte? BINGO! >> Hattet ihr schon einmal ein derartiges Problem oder habt ich Wer hatte die noch NICHT?
Max M. schrieb: > Ich wäre Dankbar für jede Hilfe! Abgeschirmte Leitungen, sowohl für die Endschalter, als auch für die Motoren. Komplett, auf der ganzen Länge. Dazu dann, wie schon geschrieben wurde, niederohmige Pull-Ups an den Schalteingängen. Oliver
:
Bearbeitet durch User
Oliver S. schrieb: > Abgeschirmte Leitungen, sowohl für die Endschalter, als auch für die > Motoren. Komplett, auf der ganzen Länge. Dazu dann, wie schon > geschrieben wurde, niederohmige Pull-Ups an den Schalteingängen. Und einen Kondesator, wie schon geschrieben wurde. Und allem voran ein vernünftiges Versorgungskonzept mit brauchbarer Masseführung. Max M. schrieb: > Ich wäre Dankbar für jede Hilfe! Ich würde mal mit einem Oszi messen. Das bringt mehr als drauflosraten...
Lothar M. schrieb: > Und allem voran ein vernünftiges Versorgungskonzept mit brauchbarer > Masseführung. Dazu müßtest du den Schaltschrankbau total umkrempeln ;-)
Falk B. schrieb: > Dazu müßtest du den Schaltschrankbau total umkrempeln ;-) Dabei sieht der doch ganz genauso aus wie bei richtigen Industrierobotern ;) Oliver
Danke an alle die sich hilfsbereit gezeigt haben! Stefan ⛄ F. schrieb: > Du brauchst auf jeden Fall viel stärkere Widerstände, zum beispiel > 2,2kΩ. Falk B. schrieb: > Du bist naiv. Mit Steckbrettmentalität einen Schaltschrank aufbauen. > Naja. In einer derartigen Steuerung braucht man DRINGEND > > - niederohmigen Pull-Up (3-10k bei 5V) Wie schon gesagt wurde, hab ich schon versucht. Steckbrettmentalität, ich weiß ja nicht... bisher war eher der Schaltschrankbau meine Welt, daher leider auch die fehlende Erfahrung mit Mikrocontrollern (Mikrocontroller in Schaltschränken, nicht im Allgemeinen). Rotringvertreter schrieb: > Ich weis nicht, so wie du deine Schaltpläne präsentierst, mit > Bleistift > gezeichnet und dann noch drüber radiert (...118.Jpg) > Das ist Stand wie vor 40 Jahren :-( Die Schaltpläne waren in rudimentärer nur für mich zum verdrahten gedacht. Ist das Projekt abgeschlossen, werden sie natürlich angemessen visualisiert (EPlan). Pardon, dass ich dir diese Zeichenkunst zugemutet habe... dass das nicht zur Lösung des Problems beiträgt, ist wohl offensichtlich! Rotringvertreter schrieb: > Das Ganze sieht irgendwie nach Diplom / oder Doktorarbeit aus. > Ob man damit einen Topf gewinnt - ich weiß nicht. Doktorarbeit wohl kaum, das ganze ist ein Azubiprojekt. Dieter R. schrieb: > Verstehe ich die Bilder richtig: kilometerlange unabgeschirmte Leitungen > direkt an einem armen Prozessoreingang mit einem simplen internen > Pullup? Bitte nicht nur sagen was falsch ist, ein persönlicher Lösungsansatz wäre nett! Falk B. schrieb: > https://www.mikrocontroller.net/articles/Entprellung#Einfacher_Taster An Entprellung hatte ich auch schon gedacht, allerdings vergeht doch dann ab Endlagenbetätigung eine gewissen Zeit bis Motorstop, in der der Arm über seine Endlage hinaus fährt, oder etwa nicht? Peter D. schrieb: > In der Industrie benutzt man Optokoppler, um die empfindlichen > CPU-Eingänge von der störverseuchten Umgebung zu trennen. Falk B. schrieb: > Wenn man noch sicherer und robuster werden will/muss, nimmt man > Optokoppler an den Eingängen, die sind dann auch meist auf 24V > ausgelegt. Aber auch dort braucht es a) Schutzdioden und b) passende > Filter vor oder nach dem Optokoppler, damit nicht jeder HF-Dreck > reinspuckt. Optokoppler, okay, habe ich persönlich kaum Erfahrungswerte mit. Wie würde das in meiner Schaltung aussehen? Input, Output, Kaputt schrieb: > Du musst EINEN zentralen Punkt für GND haben. An dem (und NUR an dem) > werden die GND der verscheidenen Schaltungsteile verbunden. Sonst ergibt > das Schalten der Servos etc. Störspannungen auf GND, die der Kontroller > mit Kopfkratzen beantwortet. Ich habe alle GNDs auf die Klemmen verdrahtet und diese gebrückt und gehe davon als PELV System auf PE. Ist das kein zentraler Punkt? Falk B. schrieb: > Wenn man denn schon im Schaltschrank-Stil verdrahten will/muss, > muss man auch dementsprechend die Eingangssignale maximal filtern und > die Filterbandbreite soweit minimieren, daß die Nutzsignale noch schnell > genug durchkommen. Alles klar. Wie würde ich das realisieren? Oliver S. schrieb: > Abgeschirmte Leitungen, sowohl für die Endschalter, als auch für die > Motoren. Komplett, auf der ganzen Länge. Dazu dann, wie schon > geschrieben wurde, niederohmige Pull-Ups an den Schalteingängen. Alles klar. Was heißt in diesem Fall niederohmig? Falk B. schrieb: > Ich nehme mal an, daß das grüne Ding Mitte links der Arduino ist. DORT > müssen die RC-Filter und Pull-Ups drauf! Okay. Wie viel Farad sollte der Elko haben und welchen Widerstand brauche ich?
Max M. schrieb: > Okay. Wie viel Farad sollte der Elko haben und welchen Widerstand > brauche ich? So wird das nix. Du hast einen wirklich sauberen Aufbau gemacht, Glückwunsch, ehrlich. Aber leider hast du Schaltschrankbau betrieben, keine Mikrocontroller-Elektronik-gerechte Beschaltung. Dir fehlt grundlegendes Wissen dazu. Es ist fraglich, ob es gelingt, das mit Forums-Tips zu vermitteln. Frage: gibt es bei euch im Umfeld der Institution, wo du diesen Aufbau gemacht hast, niemanden mit den entsprechenden Fachkenntnissen, der dir direkt am Objekt helfen und das notwendige Wissen vermitteln könnte?
Max M. schrieb: > Ich habe alle GNDs auf die Klemmen verdrahtet und diese gebrückt und > gehe davon als PELV System auf PE. Ist das kein zentraler Punkt? Dein Gehäuse und die ganze Mechanik ist PE, das ist ein riesiger Kasten und sicher kein Punkt mit der Ausdehnung 0. Die Masse gehört vom PE getrennt, denn PE ist ja nichts was eine elektrische Funktion hätte, sondern es ist "Protective Earth", also lediglich ein "Schutzschild", das im letzten Notfall eingreifen soll. Den Rest vom Tag ist es die Erde, auf die irgendwelche Schirme aufgelegt und darüber Störsignale abgeleitet werden. Und genau solche Störsignale kannst du in deiner Schaltung sicher nicht brauchen. Und wenn das mit der "Masseführung ohne PE" geklappt hat, dann darfst du den PE wieder wohldefiniert an 1 Stelle an GND anbinden. Max M. schrieb: > Ich habe alle GNDs auf die Klemmen verdrahtet und diese gebrückt und > gehe davon als PELV System auf PE. Ist das kein zentraler Punkt? Stromkreise, das Wort ist schon gefallen. Stromkreise müssen möglichst klein gehalten werden, dass sie keine Störung auskoppeln oder einfangen. Das bedeutet z.B. dass der Strom, der auf der SDA-Leitung vom Andruiden zum TM5 geht, auf der GND-Leitung möglichst dicht an der SDA-Leitung wieder zum Andruiden zurück muss. Ein üblicher Schaltschrankaufbau berücksichtigt solche Strompfade nicht, weil er normalerweise mit 24V arbeitet (da wird der Eingang bei 5V noch lange nicht "high"), niederohmig und dadurch sehr robust ausgelegt ist. Und wenn du da jetzt ohne Massekonzept kreuz&quer hochohmige Signale und Lastströme direkt nebeneinander im Kabelkanal führst, dann koppelt natürlich jeder Laststromkreis beliebig in jeden Signalstromkreis über. Wie gesagt: du brauchst ein Oszi, schließt die Masseklemme direkt an den Massepin am Arduino an (also nicht irgenwo 50cm weiter weg an irgendeinem PE) und misst mal, was da für Mist ankommt.
:
Bearbeitet durch Moderator
Max M. schrieb: >> - niederohmigen Pull-Up (3-10k bei 5V) > > Wie schon gesagt wurde, hab ich schon versucht. Und WO war der angebracht? Bei DER Leitungsführung ist das NICHT egal. Außerdem ist der auch mit 1k zu hochohmig, schrieb ich schon. Den Job macht ein Kondensator deutlich besser. > Steckbrettmentalität, > ich weiß ja nicht... bisher war eher der Schaltschrankbau meine Welt, > daher leider auch die fehlende Erfahrung mit Mikrocontrollern > (Mikrocontroller in Schaltschränken, nicht im Allgemeinen). Und EMV. >> Verstehe ich die Bilder richtig: kilometerlange unabgeschirmte Leitungen >> direkt an einem armen Prozessoreingang mit einem simplen internen >> Pullup? > > Bitte nicht nur sagen was falsch ist, ein persönlicher Lösungsansatz > wäre nett! Eben das. Man kann bzw. SOLLTE in einer derartigen Steuerung Signale NIE ohne Schutz- und Filtermaßnahmen an einen Logik-IC führen! > Falk B. schrieb: >> https://www.mikrocontroller.net/articles/Entprellung#Einfacher_Taster > > An Entprellung hatte ich auch schon gedacht, Es geht hier nicht wirklich um Entprellung, sondern um Filterung von hochfrequenten Störungen (HF). > allerdings vergeht doch > dann ab Endlagenbetätigung eine gewissen Zeit bis Motorstop, in der der > Arm über seine Endlage hinaus fährt, Ja. Die Frage ist nur, wieviel. 1ms? 10ms? Da muss man überlegen, wieviel Filterung und Verzögerung akzeptabel sind. > Optokoppler, okay, habe ich persönlich kaum Erfahrungswerte mit. Wie > würde das in meiner Schaltung aussehen? > > Input, Output, Kaputt schrieb: >> Du musst EINEN zentralen Punkt für GND haben. An dem (und NUR an dem) >> werden die GND der verscheidenen Schaltungsteile verbunden. Sonst ergibt >> das Schalten der Servos etc. Störspannungen auf GND, die der Kontroller >> mit Kopfkratzen beantwortet. > > Ich habe alle GNDs auf die Klemmen verdrahtet und diese gebrückt und > gehe davon als PELV System auf PE. Ist das kein zentraler Punkt? ;-) Ja, ist er, löst aber das Problem der "wilden" Schaltschrankverdrahtung der Signal OHNE zugehörige Masse nicht! >> Wenn man denn schon im Schaltschrank-Stil verdrahten will/muss, >> muss man auch dementsprechend die Eingangssignale maximal filtern und >> die Filterbandbreite soweit minimieren, daß die Nutzsignale noch schnell >> genug durchkommen. > > Alles klar. Wie würde ich das realisieren? Schrieb ich das nicht bereits? Pull-Up 3-10k + RC-Filter. Dessen Zeitkonstante muss halt auf die Bandbreite des Sensors abgestimmt werden. 100nF + 10kR = 1ms > Oliver S. schrieb: >> Abgeschirmte Leitungen, sowohl für die Endschalter, als auch für die >> Motoren. Komplett, auf der ganzen Länge. Dazu dann, wie schon >> geschrieben wurde, niederohmige Pull-Ups an den Schalteingängen. > > Alles klar. Was heißt in diesem Fall niederohmig? 3-10k. Deutlich darunter bringt eher nix, die Hauptarbeit muss der Filter erledigen. > Okay. Wie viel Farad sollte der Elko haben und welchen Widerstand > brauche ich? 100nF + 10kR als Startpunkt. Die 100nF kann man dann, sofern nötig schrittweise verkleinern.
Lothar M. schrieb: > Wie gesagt: du brauchst ein Oszi, schließt die Masseklemme direkt an den > Massepin am Arduino an (also nicht irgenwo 50cm weiter weg an > irgendeinem PE) und misst mal, was da für Mist ankommt. Jein. Das hilft ihm zwar, Störungen zu erkennen. Die ABWESENHEIT von Störungen beweist aber garnichts. Sein ganzer Aufbau ist nicht Mikrocontroller-gerecht. Wenn er jetzt rumbastelt und dann keine Störungen mehr misst, dann kann es im späteren Betrieb jederzeit wieder zuschlagen. Erstmal braucht er eine funktionssichere Verdrahtung. 24V und/oder niederohmig und gefiltert und/oder abgeschirmt und/oder Optokoppler. Es gibt verschiedene Ansätze dazu, deshalb meine Frage, ob er das nicht mit einer fachkundigen Person vor Ort durchgehen kann.
:
Bearbeitet durch User
Dieter R. schrieb: > gibt es bei euch im Umfeld der Institution, wo du diesen Aufbau > gemacht hast, niemanden mit den entsprechenden Fachkenntnissen, der dir > direkt am Objekt helfen und das notwendige Wissen vermitteln könnte? Da wir ein Maschinenbauunternehmen sind, wird hier eigentlich garnicht mit Mikrocontrollern gearbeitet (Mit SPSen könnte ich zu genüge dienen). Daher leider auch keine Ansprechpartner. Allerdings hatte ich auch nicht damit gerechnet, dass ein Arduino im Schaltschrank solche Probleme bereitet. Aber ich bin gerne bereit dazu zu lernen! Lothar M. schrieb: > Das bedeutet z.B. dass der Strom, der auf der SDA-Leitung vom Andruiden > zum TM5 geht, auf der GND-Leitung möglichst dicht an der SDA-Leitung > wieder zum Andruiden zurück muss. Ein üblicher Schaltschrankaufbau > berücksichtigt solche Strompfade nicht, weil er normalerweise mit 24V > arbeitet (da wird der Eingang bei 5V noch lange nicht "high"), > niederohmig und dadurch sehr robust ausgelegt ist. > Und wenn du da jetzt ohne Massekonzept kreuz&quer hochohmige Signale und > Lastströme direkt nebeneinander im Kabelkanal führst, dann koppelt > natürlich jeder Laststromkreis beliebig in jeden Signalstromkreis über. Okay, das war mir nicht klar, dass das solche extremen Auswirkungen hat. Auch weil meine Schrittmotoren ja nicht gerade mit einer rießigen Spannung arbeiten, welche solche starken Störspannungen induziert. Naja, man lernt eben täglich dazu! Falk B. schrieb: > Schrieb ich das nicht bereits? Pull-Up 3-10k + RC-Filter. Dessen > Zeitkonstante muss halt auf die Bandbreite des Sensors abgestimmt > werden. 100nF + 10kR = 1ms Was meinst du mit der Bandbreite des Sensors? Die Frequenz der Störungen die ich mir einfange? Falk B. schrieb: > Pull-Up 3-10k + RC-Filter. Dessen > Zeitkonstante muss halt auf die Bandbreite des Sensors abgestimmt > werden. 100nF + 10kR = 1ms Oliver S. schrieb: > Abgeschirmte Leitungen, sowohl für die Endschalter, als auch für die > Motoren. Komplett, auf der ganzen Länge. Dazu dann, wie schon > geschrieben wurde, niederohmige Pull-Ups an den Schalteingängen. Alles klar, dann werd ich mich mal an die Arbeit machen. -Geschirmte Leitungen verlegen (Endlagen und Motoren) und Endlagenstränge von Motorsträngen räumlich trennen -Direkt an den Arduino-Inputs Pullups von 3k-10k und RC-Filter mit Tau=1ms. Da kann ich ja testen, wie weit ich die Bandbreite verringern muss, um meine Störungen weg zu bekommen. -PELV-System deinstallieren Optokoppler würde ich erst einmal weglassen und schauen, ob das ganze so schon ausreicht. Danke nochmal für die Hilfsbereitschaft! Noch Anmerkungen/Ergänzungen?
Max M. schrieb: > Da wir ein Maschinenbauunternehmen sind, wird hier eigentlich garnicht > mit Mikrocontrollern gearbeitet (Mit SPSen könnte ich zu genüge dienen). > Daher leider auch keine Ansprechpartner. Das ist ein verbreitetes Problem. > Allerdings hatte ich auch nicht > damit gerechnet, dass ein Arduino im Schaltschrank solche Probleme > bereitet. Aber ich bin gerne bereit dazu zu lernen! GUT! > Okay, das war mir nicht klar, dass das solche extremen Auswirkungen hat. > Auch weil meine Schrittmotoren ja nicht gerade mit einer rießigen > Spannung arbeiten, welche solche starken Störspannungen induziert. Naja, > man lernt eben täglich dazu! Das Problem ist weniger die Höhe des Stroms oder der Spannung sondern deren Änderungsgeschwindigkeit, sprich die Schaltgeschwindigkeit. U = L + di/dt Oder für Maschinenbauer. Induzierte Störspannung = Koppelinduktivität * Stromänderung pro Zeit Die Koppelinduktivität ist deine große Leiterschleife zwischen Signal und Masse. Wenn man da mal GENAU betrachtet, vor allem in so einem Schaltschrank, kommen da beängstigende Flächen raus. > Falk B. schrieb: >> Schrieb ich das nicht bereits? Pull-Up 3-10k + RC-Filter. Dessen >> Zeitkonstante muss halt auf die Bandbreite des Sensors abgestimmt >> werden. 100nF + 10kR = 1ms > > Was meinst du mit der Bandbreite des Sensors? Das, was dort steht, die Bandbreite des Sensor, der ein Signal an deinen Arduino schickt. In deinem Fall ein Endlagenschalter. Der muss innerhalb einer Maximalzeit von XYZ ms reagieren, sonst kommt die Reaktion des Arduino zu spät. > Die Frequenz der Störungen die ich mir einfange? Mensch Meier, auch du bist nicht sooo schwer von Begriff! Ein Sensor liefert eher keine Störungen, die kommen von der Störquelle! > Oliver S. schrieb: >> Abgeschirmte Leitungen, sowohl für die Endschalter, als auch für die >> Motoren. Komplett, auf der ganzen Länge. Dazu dann, wie schon >> geschrieben wurde, niederohmige Pull-Ups an den Schalteingängen. > > Alles klar, dann werd ich mich mal an die Arbeit machen. > -Geschirmte Leitungen verlegen (Endlagen und Motoren) und Schön, aber die beste Schirmung nützt gar nichts, wenn der Schirm nicht oder falsch kontaktiert wird! Er kann im Extremfall sogar die Störeinkopplung VERSTÄRKEN! Der Schirm muss NAH und niederohmig am Sender und Empfänger auf Masse gelegt werden, sprich am Sensor und am Arduino sowie am Motortreiber und Motor, dort vermutlich am Gehäuse/PE. In Schaltschränken wird dazu oft eine Schelle verwendet, die ist HF-tauglich. https://www.icotek.com/de/produkte/emv-abschirmung Die gibt es auch als halbrunde Schelle zum schrauben. Zur Not kann man den Schirm auch als verdrillte Leitung KURZ auflegen. Nicht perfekt, reicht meistens aber. Man sollte aber KEINE Lämmerschwänze von 10cm und mehr nehmen, um den Schirm aufzulegen. > Endlagenstränge von Motorsträngen räumlich trennen > -Direkt an den Arduino-Inputs Pullups von 3k-10k und RC-Filter mit > Tau=1ms. Da kann ich ja testen, wie weit ich die Bandbreite verringern > muss, um meine Störungen weg zu bekommen. > Optokoppler würde ich erst einmal weglassen und schauen, ob das ganze so > schon ausreicht. Sinnvoll.
Ein konkreter Vorschlag für die mindest--Beschaltung von digitalen Eingängen:
1 | +5V |
2 | o |
3 | | |
4 | |~| 2,2kΩ |
5 | |_| |
6 | | 10kΩ |
7 | Schraubklemme o---+---[===]---+---------o Mikrocontroller In |
8 | | |
9 | | |
10 | Zener 5,1V +---|<|----| GND |
11 | | |
12 | 100nF +----||----| GND |
Und für die Ausgänge:
1 | +---|>|---o Versorgung der Last (+) |
2 | | |
3 | 100Ω ||---+---------o Ausgang |
4 | Mikrocontroller Out o---[===]----+----||< |
5 | | ||-------------| GND |
6 | GND |---[===]----+ |
7 | 100kΩ IRLZ44N |
Das sind keine Allumfassenden Gesamtlösungen für alle Fälle, aber für viele Fälle geeignet. Bei analogen Eingängen lässt du den 2,2kΩ Widerstand weg. Der obige Vorschlag alle GND Leitungen an einem zentralen Punkt zusammen zu führen ist sehr gut und wichtig. Denke immer daran, dass Magnetfelder Spannung in Leiterschleifen induzieren. Außerdem verursacht Stromfluss einen Spannungsabfall. Elektronik beginnt zu versagen, wenn an unterschiedlichen GND Punkten eine Differenz von mehr als 0,5V vorliegt. Und ab 0,7V geht sie kaputt.
Max M. schrieb: > Da wir ein Maschinenbauunternehmen sind, wird hier eigentlich garnicht > mit Mikrocontrollern gearbeitet (Mit SPSen könnte ich zu genüge dienen). Bevor Du in wilden Aktionismus verfällst, würde ich mir mal sehr genau anschauen, wie SPSen ihre Ein- und Ausgänge realisieren - und das mehr oder weniger 1:1 kopieren. Zwischen Arduino und Schaltschrank-Verdrahtung gehört eine Zwischenschicht (in Arduiono-Sprech ein "shield") mit den schon genannten Maßnahmen: Pull-up, Filter, Optokoppler usw. Hint: Optokoppler benutzt man, um z.B. Masseverkopplungen zu vermeiden. Benutzt ein Signaleingang und ein Leistungssignal die gleiche Rückleitung (Masseleitung), sieht der Eingang die vom Leistungsteil auf der gemeinsamen Rückleitung erzeugten Störungen. just my 2ct
Stefan ⛄ F. schrieb: > Ein konkreter Vorschlag für die mindest--Beschaltung von digitalen > Eingängen: Dumme Frage eines in dieser Angelegenheit Unwissenden: Gibt es fertige Shields, die eine solche Beschaltung (oder das Layout dafür) mitbringen und die man dem TO empfehlen kann? Sonst hat er nämlich das Problem, dass er das irgendwie an Klemmleisten anpfriemeln muss und sich dabei weitere Fehlerquellen schaffen kann. (P.S.: ich würde es übrigens etwas niederohmiger machen, 1 kOhm statt 2,2 kOhm Pullup und vielleicht auch den Längswiderstand niedriger wg. Störabstand. Die paar mA schaden nicht, sondern helfen ggf. der Kontaktsicherheit).
Dieter R. schrieb: > Gibt es fertige Shields, die eine solche Beschaltung (oder das Layout > dafür) mitbringen und die man dem TO empfehlen kann? Weiss ich nicht, aber es gibt Geräte für Hutschiene, wo ein Arduino mit passender Beschaltung drinsteckt: https://www.controllino.shop/
Dieter R. schrieb: > Gibt es fertige Shields, die eine solche Beschaltung (oder das Layout > dafür) mitbringen und die man dem TO empfehlen kann? Sonst hat er > nämlich das Problem, dass er das irgendwie an Klemmleisten anpfriemeln > muss und sich dabei weitere Fehlerquellen schaffen kann. Er hat schon eine Platine mit Klemmen als Shield über dem Arduino, dort kann man die Filter draufpacken.
Stefan ⛄ F. schrieb: > Dieter R. schrieb: >> Gibt es fertige Shields, die eine solche Beschaltung (oder das Layout >> dafür) mitbringen und die man dem TO empfehlen kann? > > Weiss ich nicht, aber es gibt Geräte für Hutschiene, wo ein Arduino mit > passender Beschaltung drinsteckt: https://www.controllino.shop/ Na, das ist es doch!!! Wenn man bedenkt, welche Sorgfalt (und welchen Materialaufwand) der TO in das Gesamtsystem gesteckt hat, dann ist der (finanzielle) Aufwand dafür ein Klacks. Sieht zumindest auf den ersten Blick unbedingt empfehlenswert aus (+ abgeschirmte Verdrahtung).
Angehängte Dateien:
-

Low_Pass_mit_Pullup.jpg
21 KB
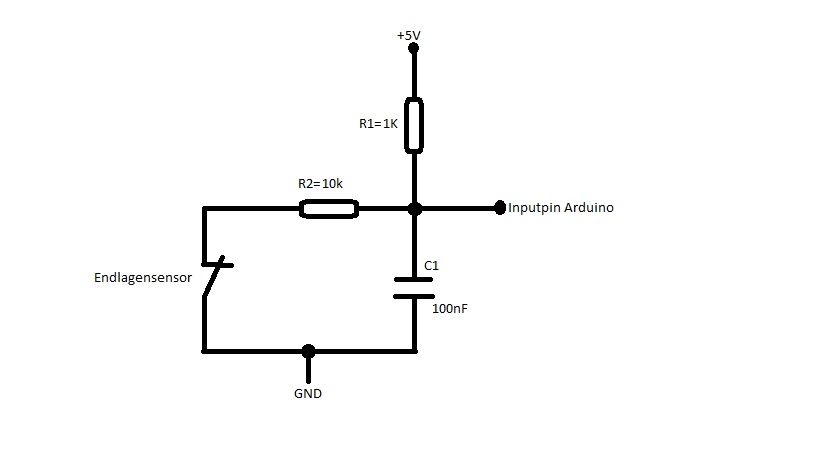
Falk B. schrieb: > Das, was dort steht, die Bandbreite des Sensor, der ein Signal an deinen > Arduino schickt. In deinem Fall ein Endlagenschalter. Jetzt hat es klick gemacht, danke! Stefan ⛄ F. schrieb: > Ein konkreter Vorschlag für die mindest--Beschaltung von digitalen > Eingängen: Dieter R. schrieb: > (P.S.: ich würde es übrigens etwas niederohmiger machen, 1 kOhm statt > 2,2 kOhm Pullup und vielleicht auch den Längswiderstand niedriger wg. > Störabstand. Die paar mA schaden nicht, sondern helfen ggf. der > Kontaktsicherheit). Falk B. schrieb: > 3-10k. Deutlich darunter bringt eher nix, die Hauptarbeit muss der > Filter erledigen. In der Skizze habe ich jetzt 1k genommen, das ist doch zumindest nicht schlechter als z.B. 4,7k denke ich Ist der RC Filter & Pullup Aufbau auf dem Bild so richtig? Stefan ⛄ F. schrieb: > https://www.controllino.shop/ Interessant, ich hab mir das Ding mal angeschaut, sieht schon viel mehr nach Industrietauglichkeit aus. Was ich noch nicht ganz verstehe: Ich kann den Controllino ja offensichtlich mit 24VDC betreiben. Geb ich auf meine Inputs also auch 24V und kann mir dann den ganzen Schirmungsaufwand und RC Filter & Pullup Widerstand sparen? Also ist meine Steuerspannung dann auch 24V? Und wenn dem so wäre, geben meine Outputs dann trotzdem dasselbe PWM Signal aus wie mein Arduino Mega bzw. arbeitet der Controllino auch mit 24V bei den Outputs? Falls das alles NICHT der Fall ist, wo liegt dann in meinem Fall der Unterschied bzw. der Vorteil des Controllinos gegenüber dem Megas?
Max M. schrieb: > In der Skizze habe ich jetzt 1k genommen So kriegst du den Eingang nicht mehr auf LOW Pegel herunter gezogen. Die beiden Widerstände bilden einen Spannungsteiler. Zum Kontrollino kann ich dir keine Detail-Fragen beantworten. Ich habe sie nie verwendet, nur zur Kenntnis genommen dass es sie gibt, falls ich sie mal brauche.
Max M. schrieb: > In der Skizze habe ich jetzt 1k genommen, das ist doch zumindest nicht > schlechter als z.B. 4,7k denke ich > Ist der RC Filter & Pullup Aufbau auf dem Bild so richtig? Nö. Der Pull-Up muss VOR den Filter, direkt an den Eingang (links). > nach Industrietauglichkeit aus. Was ich noch nicht ganz verstehe: Ich > kann den Controllino ja offensichtlich mit 24VDC betreiben. Geb ich auf > meine Inputs also auch 24V und kann mir dann den ganzen > Schirmungsaufwand und RC Filter & Pullup Widerstand sparen? Also ist > meine Steuerspannung dann auch 24V? Sieht so aus. > Und wenn dem so wäre, geben meine Outputs dann trotzdem dasselbe PWM > Signal aus wie mein Arduino Mega bzw. arbeitet der Controllino auch mit > 24V bei den Outputs? Keine Ahnung. > Falls das alles NICHT der Fall ist, wo liegt dann in meinem Fall der > Unterschied bzw. der Vorteil des Controllinos gegenüber dem Megas? Er ist, hoffentlich, besser in Bezug auf EMV und Schutz gegen Störungen und Überspannungen.
Dieter R. schrieb: > Gibt es fertige Shields, die eine solche Beschaltung (oder das Layout > dafür) mitbringen und die man dem TO empfehlen kann? Sonst hat er > nämlich das Problem, dass er das irgendwie an Klemmleisten anpfriemeln > muss und sich dabei weitere Fehlerquellen schaffen kann. Deshalb pfuscht man keine Arduino Platine in den Schaltschrank. Wenn dann macht man eine fertige Platine für seine Bedürfnisse und packt die in ein Hutschienengehäuse. Oder kauft halt was fertiges. Nackte Arduino Boards sind für den Basteltisch. Niemals für den produktiven Einsatz. Schon gar nicht im Schaltschrank. Das ist das Resultat der ganze unwissenden Schreihälse, die immer rumbrüllen dass man Arduino supi überall direkt einsetzen kann. Manche glauben den Quatsch und machen so was wie der TE. Das ist nur eine Laborkarte. Mehr schlecht als recht designed. Und die packt er in einen Schaltschrank. Das ist mittelmäßig verrückt. Anders kann man das nicht sagen.
http://controllinoshop.eu/downloads/CONTROLLINO-Bedienungsanleitung-V1.2-2018-04-23.pdf Dort sind die Ein- und Ausgänge beschrieben.
Max M. schrieb: >> https://www.controllino.shop/ > > Interessant, ich hab mir das Ding mal angeschaut, sieht schon viel mehr > nach Industrietauglichkeit aus. Was ich noch nicht ganz verstehe: Ich > kann den Controllino ja offensichtlich mit 24VDC betreiben. Geb ich auf > meine Inputs also auch 24V und kann mir dann den ganzen > Schirmungsaufwand und RC Filter & Pullup Widerstand sparen? Also ist > meine Steuerspannung dann auch 24V? > Und wenn dem so wäre, geben meine Outputs dann trotzdem dasselbe PWM > Signal aus wie mein Arduino Mega bzw. arbeitet der Controllino auch mit > 24V bei den Outputs? > Falls das alles NICHT der Fall ist, wo liegt dann in meinem Fall der > Unterschied bzw. der Vorteil des Controllinos gegenüber dem Megas? Wie alle anderen hier auch kenne ich das Ding nicht, habe nur kurz das Datenblatt der Version "CONTROLLINO MAXI Automation pure" überflogen. Ob das nun von deinen Anforderungen an I/Os passt, weiß ich nicht. Du solltest es dir selbst sehr genau ansehen. Offenbar ist es 24V-Technik, eingangs- und ausgangsseitig, insbesondere mit großem Störspannungsabstand an den Eingängen. Zusätzliche Filter sollten nicht mehr erforderlich sein. Geschirmte Leitungen sind trotzdem zu empfehlen, es kann aber auch ohne funktionieren, wer weiß das schon? Es ist immer besser, sich bei kritischen Signalen auf die sichere Seite zu legen. Falls du ein Gerät aus dieser Baureihe (oder irgendetwas anderes) schlussendlich einsetzt, wäre es freundlich von dir, wenn du über deine Erfahrungen damit berichtest, damit auch für andere Leser ein Lerneffekt entsteht.
Angehängte Dateien:
-

Low_Pass_mit_Pullup.jpg
21 KB
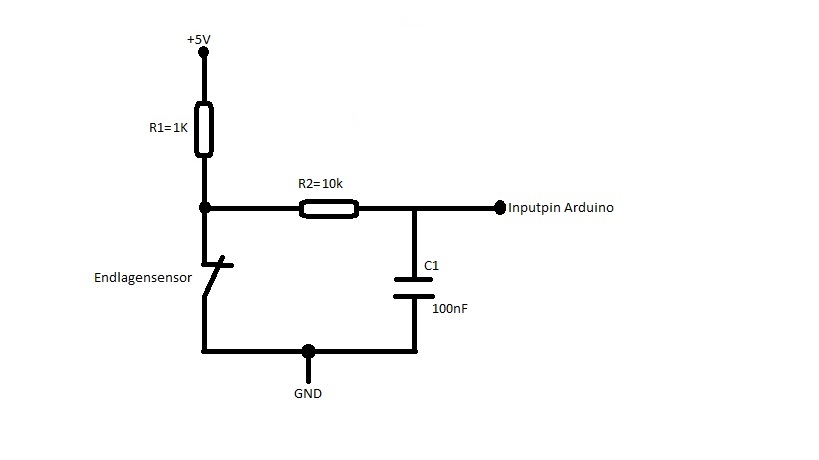
Falk B. schrieb: > Nö. Der Pull-Up muss VOR den Filter, direkt an den Eingang (links). Ist das Schaltbild nun so richtig? Dieter R. schrieb: > Zusätzliche Filter sollten nicht > mehr erforderlich sein Sollte der interne Pullup trotzdem verwendet werden? Oder soll ich, falls ich mich für den Cotrollino entscheide, mit meinen Endlagen auf 24V gehen statt auf GND? Falk B. schrieb: > http://controllinoshop.eu/downloads/CONTROLLINO-Bedienungsanleitung-V1.2-2018-04-23.pdf > > Dort sind die Ein- und Ausgänge beschrieben. Super danke! Dieter R. schrieb: > 24V-Technik Dieter R. schrieb: > ausgangsseitig Darum geht es mir. Die Treiber arbeiten zwar schon mit 24V, allerdings nicht auf der Steuerseite. Ich hab bis jetzt nichts darüber gefunden, ob ich diese Treiber auch mit dem Controllino ansteuern könnte hinsichtlich einer evtl. zu hohen Steuerspannung. Da hier leider noch niemand direkte Erfahrung mit Controllinos hat, werde ich mal weiter recherchieren und ggf. den Hersteller kontaktieren.
:
Bearbeitet durch User
Max M. schrieb: > Sollte der interne Pullup trotzdem verwendet werden? Oder soll ich, > falls ich mich für den Cotrollino entscheide, mit meinen Endlagen auf > 24V gehen statt auf GND? Wie du unten selbst schreibst, Unterlagen sichten, ggf. Hersteller fragen. Vielleicht suchst du auch noch zusätzlich, ob es weitere Hersteller ähnlicher Geräte gibt und ob Erfahrungsberichte dazu existieren. Es scheint so, als habe hier niemand Erfahrungen damit. Ich jedenfalls nicht, ich habe bloß früher ein paar Mal Siemens Logo! eingesetzt. > Da hier leider noch niemand direkte > Erfahrung mit Controllinos hat, werde ich mal weiter recherchieren und > ggf. den Hersteller kontaktieren.
Max M. schrieb: > Sollte der interne Pullup trotzdem verwendet werden? Nein, sonst kommst du wider nicht auf LOW Pegel. Der 10kΩ Widerstand bildet zusammen mit dem internen Pull-Up einen Spannungsteiler.
Stefan ⛄ F. schrieb: > Max M. schrieb: >> Sollte der interne Pullup trotzdem verwendet werden? > > Nein, sonst kommst du wieder nicht auf LOW Pegel. Der 10kΩ Widerstand > bildet zusammen mit dem internen Pull-Up einen Spannungsteiler. Das gilt für Original-Arduino mit externer Schutzbeschaltung nach Stefan F. So wie ich die Frage verstanden habe, bezog sie sich auf den Controllino. Was da drin ist und wie man I/Os initialisieren soll, wissen wir nicht. Es wird aber vermutlich eine Anleitung bzw. Beispielcode dazu geben.
Max M. schrieb: > Ist das Schaltbild nun so richtig? Ja. > Sollte der interne Pullup trotzdem verwendet werden? NEIN! > Oder soll ich, > falls ich mich für den Cotrollino entscheide, mit meinen Endlagen auf > 24V gehen statt auf GND? Hmm, das mußt du vermutlich, denn die Eingänge vom Controllino sind SPS-typische Eingänge mit Spannungsteilern gegen GND, OHNE Pull-Up!
Max M. schrieb: > Oder soll ich, > falls ich mich für den Cotrollino entscheide, mit meinen Endlagen auf > 24V gehen statt auf GND? 1. Gemäß den allgemeinen Regeln der Sicherheit baut man einen Endschalter als Öffner, der den Strom zum Signaleingang unerbricht. Alles andere ist Bastelei. 2. Die Eingänge der Motortreiber brauchen 5Volt/10mA (Datenblatt lesen hilft). Dementsprechend braucht es bei höherer Spannung Serienwiderstände. 3. Ich habe mir vor einiger Zeit mal die grbl-Motorsteuerung für 3D-Drucker angeschaut. Da war der AVR ziemlich ausgelastet, um die Schleichgeschwindigkeit eines 3D-Druckers hinzubekommen. Das läßt aus meiner (natürlich unmaßgeblichen) Sicht nichts Gutes für den Roboterarm erahnen. Das aber nur als gutgemeinten Rat, sich vorher zu vergewissern, daß ein AVR/Arduino/Controllino von der Rechenleistung ausreicht. Gruß Klaus (der soundsovielte)
Klaus S. schrieb: > Ich habe mir vor einiger Zeit mal die grbl-Motorsteuerung für 3D-Drucker > angeschaut. Da war der AVR ziemlich ausgelastet, um die > Schleichgeschwindigkeit eines 3D-Druckers hinzubekommen. Das läßt aus > meiner (natürlich unmaßgeblichen) Sicht nichts Gutes für den Roboterarm > erahnen. Das KANN an der zu kleinen CPU-Leistung des AVRs liegen. Oft ist es aber die miese und planlose Programmierung, welche die Lahmarschigkeit verursacht. Und das nicht nur beim AVR, auch bei DEUTLICH fetteren CPUs!
>>> Sollte der interne Pullup trotzdem verwendet werden? >> Nein, sonst kommst du wieder nicht auf LOW Pegel. Der 10kΩ Widerstand >> bildet zusammen mit dem internen Pull-Up einen Spannungsteiler. Dieter R. schrieb: > Das gilt für Original-Arduino mit externer Schutzbeschaltung nach Stefan > F. Ich bezog mich auf die Schaltung zu der er die Frage stellte: Beitrag "Re: Arduino Inputs willkürlich HIGH & LOW trotz Pullup"
Stefan ⛄ F. schrieb: >> Sollte der interne Pullup trotzdem verwendet werden? > > Nein, sonst kommst du wider nicht auf LOW Pegel Falk B. schrieb: >> Sollte der interne Pullup trotzdem verwendet werden? > > NEIN! Wie Dieter R bereits geschrieben hat, die Frage bezog sich auf den Controllino. Dass ich bei externem Pullup keinen Internen brauche ist mir klar. Falk B. schrieb: > Hmm, das mußt du vermutlich, denn die Eingänge vom Controllino sind > SPS-typische Eingänge mit Spannungsteilern gegen GND, OHNE Pull-Up! Alles klar, ich habe noch etwas weitergesucht und habe das auch so verstanden. Klaus S. schrieb: > Gemäß den allgemeinen Regeln der Sicherheit baut man einen Endschalter > als Öffner, der den Strom zum Signaleingang unerbricht. Alles andere ist > Bastelei. Logisch, wurde, wie in den Unterlagen ersichtlich ist, ja auch so gemacht. Hat aber jetzt mit der Frage nichts zu tun. Klaus S. schrieb: > Die Eingänge der Motortreiber brauchen 5Volt/10mA (Datenblatt lesen > hilft). Ist mir vollkommen klar, gerade deswegen habe ich ja die Frage zur Kompatibilität von Controllino & Treiber gepostet. Klaus S. schrieb: > Dementsprechend braucht es bei höherer Spannung Serienwiderstände. Stimmt, ein Spannungsteiler ist da eine Möglichkeit. Klaus S. schrieb: > Das aber nur als gutgemeinten Rat, sich vorher zu vergewissern, daß > ein AVR/Arduino/Controllino von der Rechenleistung ausreicht. Falk B. schrieb: > Das KANN an der zu kleinen CPU-Leistung des AVRs liegen. Oft ist es aber > die miese und planlose Programmierung, welche die Lahmarschigkeit > verursacht. Und das nicht nur beim AVR, auch bei DEUTLICH fetteren CPUs! Ich denke auch, in dem Fall liegt der Fehler eher beim Programmierer. Hinsichtlich Rechenleistung sollte ein ATmega2560 für meine Zwecke, was eine CNC-Steuerung betrifft, ausreichen. Arduinos wurden ja schon sehr häufig für CNC-Fräsen, 3D-Drucker und auch Roboterarme verwendet.
Der Controllino ist ja nicht gerade ein Billgi-Ding. Da erwarte ich, dass der Hersteller dir solche Pre-Sales fragen gerne beantwortet. Sollte er jedenfalls, sonst würde es nicht kaufen.
Angehängte Dateien:
-

Eingangsbeschaltung.PNG
3,1 KB
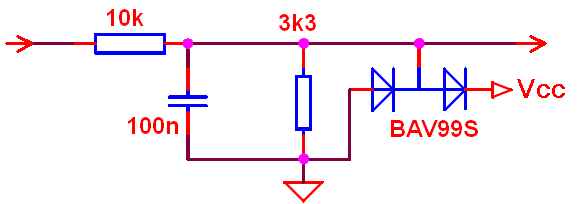
Max M. schrieb: > Klaus S. schrieb: >> Gemäß den allgemeinen Regeln der Sicherheit baut man einen Endschalter >> als Öffner, der den Strom zum Signaleingang unerbricht. Alles andere ist >> Bastelei. > Logisch, wurde, wie in den Unterlagen ersichtlich ist, ja auch so > gemacht. Allerdings schaltet der Schalter eben gegen GND. Wenn du nun ein durchgescheuertes Kabel aufs Gehäuse (genannt "Masseschluss" oder "Erdschluss") hast, und der Eingang dauernd auf GND liegt, dann erkennt deine Steuerung immer "geschlossen". Weil aus diesem Grund in der Steuerungstechnik üblicherweise die Highside, also 24V über einen Schaltkontakt auf einen Eingang geschaltet werden, mache ich das immer so wie im Anhang. Bei Vcc=3V3 habe ich mit 10k/3k3 eine Schaltschwelle (Umschaltung zwischen 0 und 1) von ca 7V. Für 5V geht diese Schaltschwelle auf ca 10V hoch.
:
Bearbeitet durch Moderator
Max M. schrieb: > Einen externen Pullup hab ich auch schon getestet, auch > einen niedrigen mit 1k, ohne Erfolg. Dann würde ich - bevor ich alles zerreiße, wie von den Vorschreibern empfohlen - einen "how low can you go" Ansatz wählen und auf 100 Ohm runtergehen. Die Endschalterkontakte halten sicher 50mA aus. Die Widerstände verbraten im geschalteten Zustand 250mW, werden also ein wenig warm und sollten daher passend dimensioniert sein. Und noch ein Test: Wenn auch bei gebrücktem Pullup, also 0 Ohm nach 5V ohne Endschalterkontakt, Signale durchkommen, dann hast Du ein anderes Problem, dann brechen die 5V ein.
MWS schrieb: > einen "how low can you go" Ansatz wählen und auf 100 Ohm runtergehen. Dann sollten diese Pullups aber nicht mehr aus den 5V des Arduino versorgt werden. Und die Masse der 5V-Versorgung muss direkt am Arduino angeschlossen werden. "Direkt" bedeutet Kabellängen unter 10cm. > Dann würde ich - bevor ich alles zerreiße, wie von den Vorschreibern > empfohlen - einen "how low can you go" Ansatz wählen Ich würde (wie ich schon zig mal empfohlen habe) endlich mal messen, statt ewig dran rumzufrickeln und zu hoffen. Ohne Messung kann man hier nur blind herumstochern. Und beim blinden Herumstochern verbrennt man sich auch mal leicht die finger oder klemmt sich die Nase ein. Zuallererst würde ich die Masseklemme an den Massepin am Arduino anklemmen und gegen verschiedene andere Massepins bzw. Masseklemmen messen. Da sollte ja idealerweise ein gerader 0V-Strich ohne Zappler zu sehen sein. Und weil das hier nicht der Fall sein wird, muss zuerst mal diese Masse gut gemacht werden. Denn die Masse ist der Bezugspunkt für alle Elektronikkomponenten! Wenn die nicht zuverlässig funktioniert, dann funktioniert auch das Gerät nicht zuverlässig.
Viele gut gemeinte Ratschläge hier, aber in meinen Augen alles nur Verschlimmbesserung. Da Geld ja offensichtlich überhaupt keine rolle spielt, man beachte schon allein die ca.1000 Reihenklemmen... ist vollkommen unverständlich weshalb beim Kern der Sache, der eigentlichen Steuerung, ein 15,30Euro Spielzeug zum Einsatz kommen muß. Da gehört eine Industriesteuerung rein und alles, inklusive Sensoren, mit einheitlich 24V versorgt. Der ganze 5V-Eiertanz ist in so einem System vollkommen fehl am Platz. Ebenso wie nicht galvanisch getrennte Ein- und Ausgänge (welche jede SPS von Hause aus mitbringen würde).
MWS schrieb: >> Einen externen Pullup hab ich auch schon getestet, auch >> einen niedrigen mit 1k, ohne Erfolg. > > Dann würde ich - bevor ich alles zerreiße, wie von den Vorschreibern > empfohlen - einen "how low can you go" Ansatz wählen und auf 100 Ohm > runtergehen. Unsinn! Viel hilft hier nicht viel!
Stefan ⛄ F. schrieb: > Weiss ich nicht, aber es gibt Geräte für Hutschiene, wo ein Arduino mit > passender Beschaltung drinsteckt: https://www.controllino.shop/ Wo soll denn da der Vorteil gegenüber einer richtigen SPS sein? Kann auf das Ding ein Programm runter, aber auch wieder zurück auf den (Prorgrammier-)Rechner hoch geladen werden? Kann man den Ablauf online am Rechner zur Laufzeit beobachten, testweise Eingänge setzen oder mit Analogwerten versorgen, Variablen manipulieren? Ich weiss nicht so recht...
Grausam und hoffen wir dass Dein Schaltschrank kein Industrieprodukt ist ! Bastellprojekt im Keller OK. Arduino im Schaltschrank ???? Sowas geht schon 3 mal nicht. Man verwendet für sowas SPS ( Siemens und Co ) Keine Abgeschirmte Leitungen. Kein Blech für Masse und Abschirmung im Schrank Am besten finde ich die Zuleitung. Schön Loch bohren und kabel durch. Die Pläne zum Schaltschrank...Ohne Kommentar
:
Bearbeitet durch User
Beleuchter schrieb: > aber auch wieder zurück auf den (Prorgrammier-)Rechner hoch geladen werden? Kannst du aus einem Kuchen wieder Butter, Eier und Mehl machen?
Thomas K. schrieb: > Arduino im Schaltschrank ???? Sowas geht schon 3 mal nicht. > Man verwendet für sowas SPS ( Siemens und Co ) Du hast noch nie einen Rechner im Schaltschrank gesehen? Nur SPS von Siemens & Co? Es müssen halt die richtigen Schaltschrank-tauglichen Komponenten und die richtige Verdrahtung sein. Darum dreht es sich hier ja.
Thomas K. schrieb: > Arduino im Schaltschrank ???? Sowas geht schon 3 mal nicht. > Man verwendet für sowas SPS ( Siemens und Co ) > Keine Abgeschirmte Leitungen. > Kein Blech für Masse und Abschirmung im Schrank > Am besten finde ich die Zuleitung. Schön Loch bohren und kabel durch. > Die Pläne zum Schaltschrank...Ohne Kommentar Im Internet anmelden um sich an anderen abzureagieren... kein Kommentar.
Thomas K. schrieb: > Man verwendet für sowas SPS ( Siemens und Co ) > Keine Abgeschirmte Leitungen. Nicht dein Ernst, oder?
Heiko T. schrieb: > Nicht dein Ernst, oder? Die Motorleitungen würde ich schon abschirmen, aber vor allem ist auch im Schaltschrank eine Trennung zwischen Versorgung, Aktoren und Sensoren sehr ratsam. Denn sonst koppelt jede Störung aus dem Netz oder von den Aktoren gleich auf die Sensoren ein. Und wenn da ein Analoggeber dabei ist, dann versaut es dem eben das Signal. Und wenn die PWM der Motoren auf die Netzleitung überkoppelt, kommt der EMV-Spezi und schüttelt den Kopf...
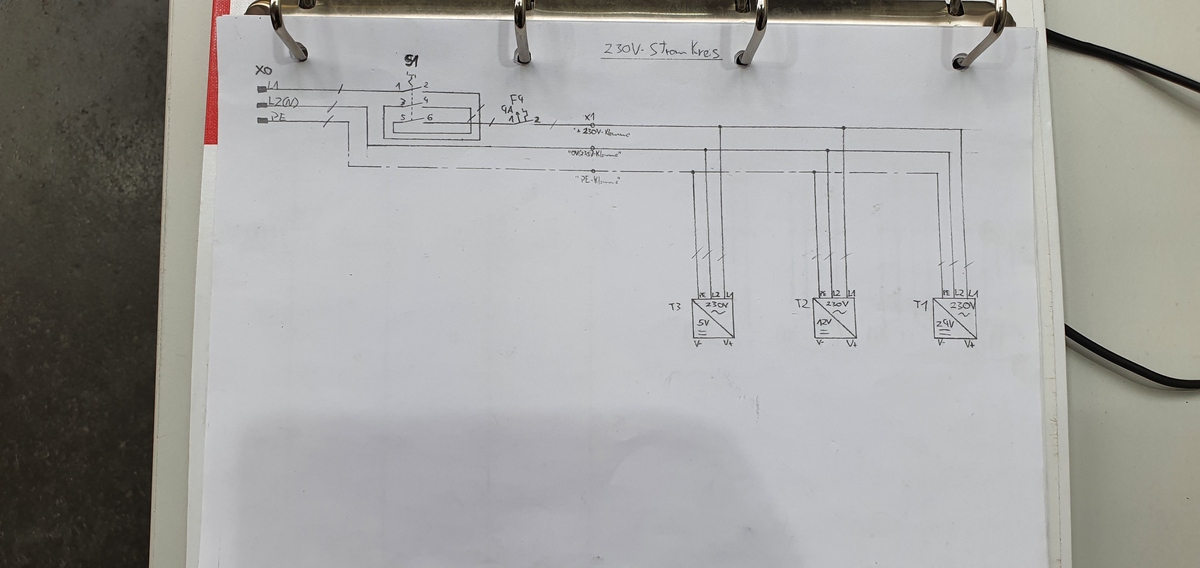
Lothar M. schrieb: > Die Motorleitungen würde ich schon abschirmen, aber vor allem ist auch > im Schaltschrank eine Trennung zwischen Versorgung, Aktoren und Sensoren > sehr ratsam. Da lauert übrigens noch ein Problem im Aufbau des TO. Soweit ich das in den Bildern sehen kann, ist die Netzversorgung mit Signalleitungen im selben Kabelkanal verlegt. Eigentlich sollte man das ändern. Jedenfalls müssen aber nachzurüstende abgeschirmte Leitungen netzspannungstauglich sein. Da der TO sowieso umverdrahten muss, wäre es eine lohnende Aufgabe, dabei für eine saubere Trennung in separaten Kabelkanälen zu sorgen. Eventuell muss dafür der Arduino (oder Controllino) umplatziert werden. Und eine ordentliche Netzzuführung, da hat Thomas K. schon recht.
:
Bearbeitet durch User
>Wenn ich die Endlage am Roboterarm überbrücke und die Leitung vom >Inputpin des Arduino direkt zur GND-Klemme lege, habe ich Keine >Störungen mehr. Also ist wohl der Endschalter der nicht richtig schaltet... Was ist das denn für ein Ding Hallsensor? Lichtschranke? Mechanisch? Wie Sieht die Verdrahtung davon aus bzw. Betriebsspannung im Falle von Hallsensor oder Lichtschranke?
uwe schrieb: > Also ist wohl der Endschalter der nicht richtig schaltet... Die Brücke wird nicht den den Schalterpins gemacht, sondern an den Arduino-Pins. Dann wird der Pin-Pegel stabil auf low gezogen. > Was ist das denn für ein Ding Hallsensor? Lichtschranke? Mechanisch? > Wie Sieht die Verdrahtung davon aus bzw. Betriebsspannung im Falle von > Hallsensor oder Lichtschranke? Hast du dir die Schaltpläne ganz oben ma langeschaut? Im https://www.mikrocontroller.net/attachment/553599/20220412_100118.jpg) sieht man rechts die Endschalter (mechanische Öffner), die dort auf X1 gehen, was dann auf ziemlichen Umwegen wieder zum GND des Arduinos geht.
:
Bearbeitet durch Moderator
Lothar M. schrieb: > uwe schrieb: >> Also ist wohl der Endschalter der nicht richtig schaltet... > Die Brücke wird nicht den den Schalterpins gemacht, sondern an den > Arduino-Pins. Dann wird der Pin-Pegel stabil auf low gezogen. Vor allem gibt es dann keine große Einkoppelschleife mehr!
Thomas K. schrieb: > Grausam und hoffen wir dass Dein Schaltschrank kein Industrieprodukt ist > ! > Bastellprojekt im Keller OK. > > Arduino im Schaltschrank ???? Sowas geht schon 3 mal nicht. > Man verwendet für sowas SPS ( Siemens und Co ) > Keine Abgeschirmte Leitungen. > Kein Blech für Masse und Abschirmung im Schrank > Am besten finde ich die Zuleitung. Schön Loch bohren und kabel durch. > Die Pläne zum Schaltschrank...Ohne Kommentar Grausam, sich über Leute, die hier höflich um Hilfe suchen, derartig auszulassen! Zu den anderen Punkten muss ich nichts sagen, einiges davon ist berechtigte Kritik, wurde aber hier schon angesprochen und zur Kenntnis genommen. Solche Kommentare sind weder zielführend noch erwünscht, geschweige denn gute Werbung für dieses Forum! Also halte dich bitte raus! Beleuchter schrieb: > Wo soll denn da der Vorteil gegenüber einer richtigen SPS sein? Ich suche darin garkeinen Vorteil gegenüber einer SPS. Wie schon erwähnt ist das ganze ein (Industrie)Azubiprojekt (das immer wieder erweitert werden kann), das eigentlich den Sinn hatte, Azubis im Maschinenbau etwas in die Thematik Mikrocontroller und C/C++-angelehntes Programmieren einzuführen, daher war der Arduino als zentrales Element gedacht und der Roboter als Verknüpfung zur Industrie. Nun habe ich, wie wir mittlerweile ausführlich an Fehlern in Planung und Aufbau erörtert haben, die Störanfälligkeit eines Arduino in Industrieumgebung unterschätzt. Daher ja auch dieser Thread... Deswegen sehe ich den Controllino als dafür sehr geeignet, da er für Industrieschaltschränke- und Umgebung entworfen wurde und trotzdem im Kern ein Arduino ist. Deswegen ist hier ein Schw...vergleich zwischen Controllino und SPS überflüssig. Lothar M. schrieb: > Die Motorleitungen würde ich schon abschirmen, aber vor allem ist auch > im Schaltschrank eine Trennung zwischen Versorgung, Aktoren und Sensoren > sehr ratsam. > > Denn sonst koppelt jede Störung aus dem Netz oder von den Aktoren gleich > auf die Sensoren ein. Und wenn da ein Analoggeber dabei ist, dann > versaut es dem eben das Signal. > > Und wenn die PWM der Motoren auf die Netzleitung überkoppelt, kommt der > EMV-Spezi und schüttelt den Kopf... Dieter R. schrieb: > Da lauert übrigens noch ein Problem im Aufbau des TO. Soweit ich das in > den Bildern sehen kann, ist die Netzversorgung mit Signalleitungen im > selben Kabelkanal verlegt. Eigentlich sollte man das ändern. Jedenfalls > müssen aber nachzurüstende abgeschirmte Leitungen netzspannungstauglich > sein. Sofern ich das ganze weiter mit dem Arduino plane, wird das wohl vonnöten sein. Allerdings hoffe ich, mit dem Controllino einen soliden Spagat zwischen Mikrocontroller-gerecht und Industrieüblich zu erreichen, so dass alle Parteien zufrieden sind. Dieter R. schrieb: > Da der TO sowieso umverdrahten muss, wäre es eine lohnende Aufgabe, > dabei für eine saubere Trennung in separaten Kabelkanälen zu sorgen. > Eventuell muss dafür der Arduino (oder Controllino) umplatziert werden. Das Durcheinander im Kabelkanal, auch zwischen Steuer-und Arbeitsleitungen, ist eben in Schaltschränken mit SPS und 24V Steuerspannung nichts Außergewöhnliches. Daher hoffe ich, dass dieser Aufbau mit einem Controllino so funktioniert, wie er sollte. Nun muss nur noch die kleinste Violine der Welt mitspielen.
Max M. schrieb: > Solche Kommentare sind weder zielführend Ignoriere sie, wenn sie dir nicht gefallen. Aber wenn du mit deinem Problem an die Öffentlichkeit gehst, solltest du sowas abkönnen. > Das Durcheinander im Kabelkanal, auch zwischen Steuer-und > Arbeitsleitungen, ist eben in Schaltschränken mit SPS und 24V > Steuerspannung nichts Außergewöhnliches. Es ist trotzdem Murks. Und da hilft es nichts, wenn du meinst, damit eine Ausrede gefunden zu haben. Dadurch läuft dein Gerät nicht besser. > Industrieüblich Auch da ist dein Schaltschrank eben noch gut 40 Jahre "hinterher", denn "industrieüblich" ist heutzutage eben mindestens die erwähnte räumliche Trennung von Versorgung, Sensorik und Leistung. Und ein durchdachtes Versorgungskonzept. Du siehst ja, was passiert wenn man das nicht tut. > Allerdings hoffe ich Du sollst nicht hoffen, du sollst messen. Ich weiß nicht, warum manche sich so dermaßen dagegen sträuben, die Wahrheit über die Signalqualität in ihrem System mit eigenen Augen zu sehen. Denn allein durch die Verwendung eines anderen Controllers bei gleicher Berdrahtungsstrategie wird die Signalqualität nicht besser.
Falk B. schrieb: > Unsinn! Viel hilft hier nicht viel! Richtig, meine These lautet: wenig (Ohm) hilft viel. Und wenn's bei Pullup 0 Ohm immer noch zapplt am Eingang, ja dann bist Du mit Deiner These auf dem Holzweg, denn dann ist's die Stromversorgung und keine Einstreuung. Darum sei einfach ein wenig offener und weniger borniert.
Max M. schrieb: > > Sofern ich das ganze weiter mit dem Arduino plane, wird das wohl > vonnöten sein. Allerdings hoffe ich, mit dem Controllino einen soliden > Spagat zwischen Mikrocontroller-gerecht und Industrieüblich zu > erreichen, so dass alle Parteien zufrieden sind. Deine Äußerung ist mir jetzt nicht ganz klar. Deshalb: Das (die abgeschirmten Leitungen) sollten (bzw. müssen, wenn das als Beispiel für die Ausbildung verwendet werden und nicht bloß irgendwie zufällig funktionieren soll) auch beim Controllino verwendet werden!
Lothar M. schrieb: > MWS schrieb: >> einen "how low can you go" Ansatz wählen und auf 100 Ohm runtergehen. > Dann sollten diese Pullups aber nicht mehr aus den 5V des Arduino > versorgt werden. Das war ein einfacher Vorschlag, den man mit einem einzelnen Pullup testen kann. 5V sind vorhanden 3tes Meanwell NT von links auf der obersten Hutschiene, sollte 6A@5V können. >> Dann würde ich - bevor ich alles zerreiße, wie von den Vorschreibern >> empfohlen - einen "how low can you go" Ansatz wählen > Ich würde (wie ich schon zig mal empfohlen habe) endlich mal messen, Evtl. tut sich der TO mit dem Messen schwer, evtl. tut sich jeder schwer, wenn's nur schmale Spikes auf der Leitung sind. Bevor man 'ne halbe Stunde mit ungewissem Ergebnis misst, kann man in einer Minute den Widerstand tauschen, um zu sehen was passiert.
MWS schrieb: > Evtl. tut sich der TO mit dem Messen schwer, evtl. tut sich jeder > schwer, wenn's nur schmale Spikes auf der Leitung sind. Bevor man 'ne > halbe Stunde mit ungewissem Ergebnis misst, kann man in einer Minute den > Widerstand tauschen, um zu sehen was passiert. Klar, wir testen Zuverlässigkeit rein und präsentieren das dann den zukünftigen Azubis als industriegerechte Vorgehensweise. Das können inzwischen sogar die Chinesen besser. Zuverlässigkeit KONSTRUIERT man in das Gerät hinein, die Messung dient zum Nachweis bzw. zur Fehlersuche.
Dieter R. schrieb: > Klar, wir testen Zuverlässigkeit rein und präsentieren das dann den > zukünftigen Azubis als industriegerechte Vorgehensweise. Ein niederohmiger Abschluss in einer mit Störungen belasteter Umgebung ist durchaus angebracht und kann ohne weiteres so vermittelt werden. Auch dass die kreative Verkabelung des TO dabei der Bereitstellung der elektromagnetisch verseuchten Umgebung dient, kann lobend erwähnt werden.
Dieter R. schrieb: > Das können inzwischen sogar die Chinesen besser. Zuverlässigkeit > KONSTRUIERT man in das Gerät hinein, die Messung dient zum Nachweis bzw. > zur Fehlersuche. Ja genau, deswegen versuchen wir ja, den TO auf die wichtigen Punkte hinzuweisen. In puncto Arduino oder RaspberryPi befinden wir uns aber gerade in einer Übergangsphase, wo sich einfach durch Statistik (viele Anlagen!) ergeben wird, ob die erhoffte Stabilität erreicht werden kann. Da sind Lehrprojekte sicher ungefährlicher, als das an medizinischen Anlagen auszuprobieren. Als vor 40 Jahren die PDP-11 durch den PC ersetzt wurde, war die Diskussion sehr ähnlich. Insofern finde ich das Projekt einfach interessant. In einer SPS sitzt auch nur ein Mikrocontroller als CPU. Aber wenn man mit einer SPS zwei Motoren eine Bahnkurve fahren lassen möchte, wirds teuer. Wieso sollte man da keinen Controllino nehmen? Es gibt ja nicht nur den, sondern auch Anduino oder die Kleinsteuerungen von Barth, die sich alle Gedanken gemacht haben, wie man von der Begrenzung der SPS auf FUP/KOP/AWL loskommt. Beste Grüße Klaus (der soundsovielte)
Beleuchter schrieb: > Wo soll denn da der Vorteil gegenüber einer richtigen SPS sein? Dass dieses Produkt mit Arduino programmierbar ist. Ich gehe davon aus, dass das für den TO durchaus relevant ist, denn er hat seine Anlage ja bereits mit Arduino programmiert.
MWS schrieb: > 5V sind vorhanden 3tes Meanwell NT von links auf der obersten > Hutschiene, sollte 6A@5V können. Mit ungewisser Masseführung. > Evtl. tut sich der TO mit dem Messen schwer Ich habe da schon eine Anleitung geschrieben. Nach der Antwort darauf können wir weitersuchen. > wenn's nur schmale Spikes auf der Leitung sind. Ja, wie gesagt: Ratestunde. > Bevor man 'ne halbe Stunde mit ungewissem Ergebnis misst, kann man in > einer Minute den Widerstand tauschen, um zu sehen was passiert. Wir tun an dem Zeug schon 2 Tage rum. Keine Minute davon mit "Messen".
Max M. schrieb: > Deswegen sehe ich den Controllino als dafür sehr geeignet, da er für > Industrieschaltschränke- und Umgebung entworfen wurde und trotzdem im > Kern ein Arduino ist. Lieder hat der Hersteller offenbar nicht einmal die Beschaltung der Ein-/Ausgänge offenen gelegt. Das bin ich von Produkten dieser Preisklasse eigentlich gewohnt.
MWS schrieb: > denn dann ist's die Stromversorgung Klar ist es die Stromversorgun und die Signalführung. Mich wundert überhaupt, dass der Arduino nicht aus diesen 5V versorgt wird. Ich täte das Netzteil hübsch dicht neben den Arduino setzen und den damit vversorgen. Und nicht 7V von den 12V am Linearregler verbrutzeln.
Lothar M. schrieb: > MWS schrieb: >> denn dann ist's die Stromversorgung > Klar ist es die Stromversorgun und die Signalführung. Muss nicht beides sein, auch wenn die Kabelführung koppelwillig aufgebaut ist, kann er das evtl. ohne den Overkill einer Neuverdrahtung hinbekommen. Ein paar Grundregeln wird er schon mitgenommen haben und das jeder Hilfesuchende das raus zieht, was er selber meint, ist doch eine alte Weisheit. Ansonsten, wüsstest Du den Trick mit überschaubarem Aufwand das Ding doch noch hinzubekommen, würdest Du nicht schreiben: > Klar ist es die Stromversorgun und die Signalführung. Du weist es eben auch nicht besser, denn was ausser Stromversorgung und Signalführung soll es denn sonst sein? Das Gehäuse vielleicht, die Rollfüsse? > Ich täte das Netzteil hübsch dicht neben den Arduino setzen und > den damit vversorgen. Und nicht 7V von den 12V am Linearregler > verbrutzeln. Wenn er nicht gross Leistung aus dem Onboard-Linearregler zieht, ist das doch völlig ok.
Stefan ⛄ F. schrieb: > Leider hat der Hersteller offenbar nicht einmal die Beschaltung der > Ein-/Ausgänge offenen gelegt. Auf der Website des Herstellers gibt's ein bisschen mehr Infos als beim deutschen Vertriebspartner: https://www.controllino.com/wp-content/uploads/2021/03/MAXI-Automation-100.101.00-Datasheet_V2_2021.pdf Es gibt dort auch ein Forum, das aber keinen guten Eindruck macht. Die naheliegende Frage nach "Max Voltage of Controllino Max Automation Input 0-10V" wurde z. B. nicht beantwortet. Allerdings steht die Antwort im Datenblatt (0V–26,4V). Überhaupt wundert mich die Eingangsspezifikation, max. 26,4V für 24V-Eingänge. Klar ist das besser als die ungeschützten Eingänge des originalen Arduino-Boards, aber von einem industrietauglichen Gerät hätte ich mehr erwartet. Bei Siemens Logo! sind es aber auch nur 28,8V. Scheint also im üblichen Rahmen zu liegen.
MWS schrieb: > Du weist es eben auch nicht besser Habe ich ja auch nirgends behauptet. > denn was ausser Stromversorgung und Signalführung soll es denn sonst sein? Schon eines davon reicht locker zum Versagen des Designs. > Das Gehäuse vielleicht, die Rollfüsse? Ach geh. Jetzt wirds kindisch. Zum weiteren Vorgehen: ich habe schon zum wiederholten Mal wiederholt, was als Nächtes zu tun ist. Wenn ich der Betreuer wäre, dann würde ich eine Einführung in die Oszilloskopkunde geben. Wobei ein Techniker, der seine Technikerarbeit macht, schon mal mit dem zweithäufigsten Messgerät in der Elektrotechnik gearbeitet haben sollte. Mir wäre übrigens bedeutend wohler, wenn mehr Designer so denken würden wie ich und eben nicht "ist doch völlig ok" und "ich hoffe". Dieter R. schrieb: > wundert mich die Eingangsspezifikation, max. 26,4V für 24V-Eingänge. Ja, 24 V+10% ist schon recht knapp. Dieter R. schrieb: > Bei Siemens Logo! sind es aber auch nur 28,8V. Immerhin +20%... Die 24V Eingänge meiner Steuerungen halten mit der oben gezeigten Beschaltung übrigens dauerhaft 55V aus. Und dazu muss nur der 10k ein 1206 Widerstand sein. Es schadet dabei nichts, wenn der impulsfest ist.
:
Bearbeitet durch Moderator
Lothar M. schrieb: > Die 24V Eingänge meiner Steuerungen halten mit der oben gezeigten > Beschaltung übrigens dauerhaft 55V aus So würde ich das auch immer auslegen. Eingänge sollten die doppelt Spannung (auch negativ) überstehen und Ausgänge den doppelten Strom, als benötigt. Zumindest kurzzeitig für eine Minute.
Klaus S. schrieb: > Wieso sollte man da keinen Controllino nehmen? Es gibt ja nicht > nur den, sondern auch Anduino oder die Kleinsteuerungen von Barth Angesichts der anhaltenden Diskussion um die technischen Parameter des Controllino (was mir eher aussieht wie unzureichendes Marketing des Herstellers und nicht echte technische Defizite) hab ich als in dieser Branche bisher Nichtsahnender mal nach den genannten Alternativen gesucht. Anduino: offenbar tot. Github seit 2017 ungepflegt. 10 Forks, alle ebenso verwaist. Shop-Website nicht erreichbar, die Firma scheint ein lukrativeres Betätigungsfeld gefunden zu haben. Barth: ist ja wirklich sehr Mini, im Funktionsumfang beschränkt und von den Anschlüssen her nicht wirklich Schaltschrank-tauglich. Arduini-kompatibel sowieso nicht. Mir scheint das mehr zum Einbau in Geräte zu taugen, wo man genauso gut ein Prozessorboard einbauen könnte. Einen Arduino beispielsweise. Zielgruppe eher umgekehrt, bisherige SPS-Anwender, die nun was kleines bauen wollen, aber Angst vor Prozessoren haben. Wenn das alles an Alternativen ist, bleibt nur Controllino. Vielleicht sollte man den Hersteller mal ansprechen, ob er seine Spezifikationen nicht ergänzen kann, um Vorbehalte bezüglich unzureichender Störfestigkeit auszuräumen.
Dieter R. schrieb: > Wenn das alles an Alternativen ist, bleibt nur Controllino. M-Duino und Ardbox sollte man sich vielleicht mal anschauen https://www.industrialshields.com/shop?search=m-duino https://www.industrialshields.com/shop?search=ardbox
Stefan ⛄ F. schrieb: > M-Duino und Ardbox sollte man sich vielleicht mal anschauen > https://www.industrialshields.com/shop?search=m-duino > https://www.industrialshields.com/shop?search=ardbox Offenbar alles galvanisch getrennt, das macht einen guten Eindruck. Preise teilweise heftig. Anschlüsse und DIP-Switches auf der Unterseite finde ich allerdings echt bescheuert. Konfigurieren mit Winkelspiegel und Taschenlampe, dabei liegen teilweise auch noch die Schalter hinten und die Verdrahtung davor. Wer denkt sich denn sowas aus? Immerhin spannend, dass sich doch einige Anbieter auf diesem Gebiet tummeln. Man kann erwarten, dass nicht alle überleben werden. Insoweit wäre es vielleicht sinnvoll, in einem Projekt nur solche Geräte einzusetzen, die sich nur wenig vom "originalen" Arduino entfernen. Also eher nicht M-Duino, selbst wenn die Parameter verlockend erscheinen. Oder, hübsche Aufgabe, eigenes Shield nach den hier gemachten Vorschlägen bauen. Schwer ist das eigentlich nicht, und eine lehrreiche Demonstration für die Azubis.
Lothar M. schrieb: > Beleuchter schrieb: >> aber auch wieder zurück auf den (Prorgrammier-)Rechner hoch geladen werden? > Kannst du aus einem Kuchen wieder Butter, Eier und Mehl machen? ??? Du fällst hier normalerweise als sehr kompetenter Moderator auf, in dessen Antworten auch immer viel Praxisbezug erkennbar ist. Ist zumindest meine Meinung, nach wie vor. Um so verwunderlicher dieser unsinnige Kommentar. Allerdings beantwortet er unbewusst doch zumindest teilweise meine eigentliche Frage zum Controllino, die oben im Zitat fehlt: Beleuchter schrieb: > Wo soll denn da der Vorteil gegenüber einer richtigen SPS > sein? Es gibt wohl keinen. Aber es gibt möglicherweise Controllino Käufer, denen ein wenig der Blick über den Tellerrand fehlt... ;-)
Achso, ich bin ja noch noch die Antwort auf Deine Frage schuldig: Lothar M. schrieb: > Kannst du aus einem Kuchen wieder Butter, Eier und Mehl machen? Ja, ich kann aus dem SPS-Kuchen wieder Butter Eier und Mehl machen. Lediglich Salz oder Backpulver können dabei manchmal verloren gehen. Dafür kann man aber den fertigen Kuchen immer wieder nach belieben abschmecken, nachwürzen, und verfeinern ohne jedes mal neu backen zu müssen. Um im Bild zu bleiben...
Beitrag #7035514 wurde von einem Moderator gelöscht.
Beitrag #7035538 wurde von einem Moderator gelöscht.
Dieter R. schrieb: > Anduino: offenbar tot. Github seit 2017 ungepflegt. 10 Forks, alle > ebenso verwaist. Shop-Website nicht erreichbar, die Firma scheint ein > lukrativeres Betätigungsfeld gefunden zu haben. Meinst du Arduino.cc ? Oder wovon redest du?
Beleuchter schrieb: > Lothar M. schrieb: >> Beleuchter schrieb: >>> aber auch wieder zurück auf den (Prorgrammier-)Rechner hoch geladen >>> werden? >> Kannst du aus einem Kuchen wieder Butter, Eier und Mehl machen? > Um so verwunderlicher dieser unsinnige Kommentar. Naja, du hattest dich in dieser Frage meines Erachtens ausdrücklich auf den Irgendwas-ino und eben nicht auf eine SPS bezogen. Beleuchter schrieb: > Kann man den Ablauf online am Rechner zur Laufzeit beobachten Das Fehlen eines Debuggers ist für mich das größte Manko am Arduino-Konzept schlechthin. Debuggen über eine serielle Schnitte ist sowas von 1970.
:
Bearbeitet durch Moderator
Lothar M. schrieb: > Das Fehlen eines Debuggers ist für mich das größte Manko am > Arduino-Konzept schlechthin. Debuggen über eine serielle Schnitte ist > sowas von 1970. Wie bitte? Es gibt nichts einfacheres wie debuggen mit der Seriellen. Ist zur Laufzeit möglich ohne unendliche Breakpoints usw. und geht viel schneller. Ich habe bis jetzt alles damit rausbekommen. Aber wenn es dich beruhigt, mit der IDE 2.0 soll ein Debugger kommen. Außerdem wurde Arduino anfangs nicht für Profis entwickelt. Das passiert jetzt erst.
Veit D. schrieb: > Meinst du Arduino.cc ? Oder wovon redest du? Ich habe von Anduino geredet. Klaus S. schrieb davon, den habe ich zitiert und nachgesehen. Was ist daran so schwer zu verstehen? Da gibt's die traurigen Reste: https://github.com/andium/Anduino Gab auch mal Hardware dazu.
Stefan ⛄ F. schrieb: > Der interne Pull-Up Widerstand ist recht hochohmig (ca 50kΩ). . > > Du brauchst auf jeden Fall viel stärkere Widerstände, zum beispiel > 2,2kΩ. Das hat der TE doch schon geschrieben: Max M. schrieb: > Einen externen Pullup hab ich auch schon getestet, auch > einen niedrigen mit 1k, ohne Erfolg. Solche Störungen hatte mein Versuchsaufbau auch. Ich habe es auf Störungen aus den ~ 230V Netz geschoben, oder den Motortreiber. Konkret habe ich noch nicht gesucht, und daher leider auch keine Antwort zur Lösung. Vielleicht mal PORT-bezogen denken. Bei Analogeingängen gibt es zuweilen den unangenehmen Effekt, dass unbenutzte Eingänge Störungen auf andere Eingänge DESSELBEN Ports ausüben. Ob das bei Digital-Pins auch so ist, weiß ich nicht. Am besten alle unbenutzen Pins auf OUTPUT stellen, oder einen Pegel anschließen (GND).
Veit D. schrieb: > Es gibt nichts einfacheres wie debuggen mit der Seriellen. Doch: 1 LED ist noch "einfacher". Aber diese Einfachheit verhindert auch, dass ich z.B. irhendwann mal anhalten und ein Array mit 1000 Werten selber anschauen kann. Und es ist schon so, dass alle anderen Entwicklungssysteme einen Debugger haben. Machen die was falsch? > Aber wenn es dich beruhigt Ich hin nicht unruhig, ich nehme dann einfach die Microchip Toolchain. Da ist einer drin. > mit der IDE 2.0 soll ein Debugger kommen. Ja, soll ruhig mal, dann kann man das Ding auch für richtige Programme nutzen.
:
Bearbeitet durch Moderator
Dieter R. schrieb: >> Meinst du Arduino.cc ? Oder wovon redest du? > Ich habe von Anduino geredet. Klaus S. schrieb davon, den habe ich > zitiert und nachgesehen. Was ist daran so schwer zu verstehen? Übe Dich in Toleranz, A_n_duino gegen A_r_duino kann man leicht übersehen bzw. als Schreibfehler abtun. Vielleicht war das von Anduino sogar beabsichtigt. Aber wozu überhaupt, wenn ich die Arduino-Umgebung samt deren reichlichen Libraries / Beispielen nutzen will, nehme ich Arduino oder seine direkten Nachbauten. Schaltungen und Software liegen offen, warum soll man sich proprietäre Basteleien antun? Ich selbst spiele gerne mit Arduino, aber habe noch nie ein fertiges "Shield" auf einen (mechanisch dämlichen) UNO gesteckt. Transistor, Relais, Optokoppler etc. bekomme ich selbst zusammengelötet. Anke schrieb: > Solche Störungen hatte mein Versuchsaufbau auch. Ich habe es auf > Störungen aus den ~ 230V Netz geschoben, oder den Motortreiber. Konkret > habe ich noch nicht gesucht, und daher leider auch keine Antwort zur > Lösung. Konkrete Lösungen wird hier niemand liefern können. Es sind praktisch immer ungünstige Leitungsführungen, insbesondere Stromversorgung und Masse. Ich habe damit extrem selten Ärger, vermutlich deswegen, weil ich beruflich in der Audiotechnik unterwegs war und z.B. Brummschleifen bekämpfen musste. Meine ersten Digitalprojekte waren 74xx TTL-Logik, gegen deren Störempfindlichkeit ist der ATMega328 ein Kindergarten. Damit bleiben leider nur die globalen Ratschläge wie sternförmige Versorgung, Kondensatoren und RC-Glieder (Snubber) an induktiven Komponenten.
Lothar M. schrieb: >> Das Gehäuse vielleicht, die Rollfüsse? > Ach geh. Jetzt wirds kindisch. Nur eine Karikatur Deiner Aussagen. > Zum weiteren Vorgehen: ich habe schon zum wiederholten Mal wiederholt, > was als Nächtes zu tun ist. Tja, da glaubst Du den Stein der Weisen zu haben und niemand will's wissen. Tragisch. > Wenn ich der Betreuer wäre, Du hast die Rolle des TE's nicht erfasst. > Mir wäre übrigens bedeutend wohler, wenn mehr Designer so denken würden > wie ich und eben nicht "ist doch völlig ok" und "ich hoffe". Das ist der Unterschied zwischen Illusion und Realität.
Gegen Störempfindlichkeit der 74er Reihe gab es früher LSL. Langsamer, aber sehr störunempfindlich. Abver das ist nicht die Frage. Manfred schrieb: > Konkrete Lösungen wird hier niemand liefern können. Es sind praktisch > immer ungünstige Leitungsführungen, insbesondere Stromversorgung und > Masse. Ich habe damit extrem selten Ärger, vermutlich deswegen, weil ich > beruflich in der Audiotechnik unterwegs war und z.B. Brummschleifen > bekämpfen musste. Kippen eine Pins mit 1KOhm Pullup kann nicht auf "ungünstige Leitungsführungen" geschoben werden, so etwas gibt es nicht. Max M. schrieb: > Einen externen Pullup hab ich auch schon getestet, auch > einen niedrigen mit 1k, ohne Erfolg. Sofern vorhanden, kann man eine Oszi verwenden, um dem "Mysterium" auf die Spur zu kommen. Wurde das schon probiert?
Anke schrieb: > Das hat der TE doch schon geschrieben Schau mal in den Spiegel. Denn darauf haben andere schon lange vor dir hingewiesen und ich habe längst bestätigt, dass ich es zur Kenntnis genommen habe.
Anke schrieb: > Kippen eine Pins mit 1KOhm Pullup kann nicht auf "ungünstige > Leitungsführungen" geschoben werden, so etwas gibt es nicht. Aber sicher doch! Wenn z.B. das GND Niveau eines Signalgebers aufgrund von Spannungsabfall durch Lastströme um 1,5V angehoben wird, dann "sieht" der Mikrocontroller anstelle von einem ordentlichen LOW Pegel die 1,5V, was nicht mehr zuverlässig funktioniert. Bei TLL IC's reichten schon 0,6V für Fehlfunktionen. Ein Signal vom Mikrocontroller zur Peripherie ist noch kritischer. Das LOW vom Mikrocontroller kommt an der Peripherie als -1,5V an und zerstört diese (da sie keine negativen Spannungen verträgt). Genau das brocken sich Leute beim Bastel mit WS2812 Lichterketten häufig ein. Kannst ja mal nach "erste WS2812 LED geht immer wieder kaputt" googeln (auch auf englisch). Umgekehrt: Wenn das GND Niveau des Mikrocontroller aufgrund von Spannungsabfall durch Lastströme um 1,5V angehoben wird, dann sieht er anstelle von einem ordentlichen LOW Pegel -1,5V, was zu dessen Zerstörung führt. Ein Signal vom Mikrocontroller zur Peripherie wird bis zur Unkenntlichkeit verzerrt. Denn das LOW vom Mikrocontroller kommt bei der Peripherie als 1,5V an, was nicht funktionieren kann. Außerdem ist jede Leitung eine Antenne, und dafür sind 1kΩ keine großartige Last. Gewollte Antennen sind eher mit 50 bis 75 Ohm angeschlossen.
Anke schrieb: > Sofern vorhanden, kann man eine Oszi verwenden, um dem "Mysterium" auf > die Spur zu kommen. Wurde das schon probiert? Nein, aber lies bitte einfach mal den Thread durch. MWS schrieb: >> Wenn ich der Betreuer wäre, > Du hast die Rolle des TE's nicht erfasst. Ich meine durchaus, die Rolle korrekt erfasst zu haben, denn Max M. schrieb: > Doktorarbeit wohl kaum, das ganze ist ein Azubiprojekt. Und wenn ich mich doch getäuscht habe und Max nicht der Azubi, sondern dessen Betreuer ist, dann ist es tatsächlich Zeit, dass ersich sich aktuelle Schaltschranktechnik mal näher anschaut. Zum Rest wurde alles gesagt. Ich habe fertig. Schöne Feiertage noch.
@ Stefan (stefanus) Deine 1,0 K Pullup's sind viel zu gering. Diese belasten das Signal nur zu stark. Und damit handelt man sich wieder Probleme ein. Es ist üblich 5V - 4,7K 12V - 10-15K 24V - 47K als Pullup's zu nehmen. Die Fehlerursache hier ist in der Tat die ungeschirmte Kabelführung, sowie das Verdrahten an sich. Im Verteilerbau wird drauf geachtet, dass, wenn möglich Lastkabel und Steuerung immer in die Kanäle getrennt werden. Zum Beispiel, links Last, rechts Steuerung. Oder dann nur kreuzen, aber nicht paralell. Wenn nötig weitere senkrechte Kanäle, wo das Trennen dann besser klappt. Bei uns werden die CY-Kabel mit Schienen kurz vor den Baugruppen geerdet. Dafür gibt es von Phönix ein 10mm System mit Plastikträger.
PC-Freak schrieb: > Deine 1,0 K Pullup's sind viel zu gering. Diese belasten das Signal nur > zu stark. Sie sorgen dafür, dass angeschlossene Schaltkontakte hoch genug belastet werden, um nicht vorzeitig aus zu fallen (Stichwort: Wetting Current).
Lothar M. schrieb: > MWS schrieb: >>> Wenn ich der Betreuer wäre, >> Du hast die Rolle des TE's nicht erfasst. > Ich meine durchaus, die Rolle korrekt erfasst zu haben, denn Da musst Du genauer lesen: Max M. schrieb: > Wie schon erwähnt ist das ganze ein (Industrie)Azubiprojekt (das immer > wieder erweitert werden kann), das eigentlich den Sinn hatte, Azubis im > Maschinenbau etwas in die Thematik Mikrocontroller und C/C++-angelehntes > Programmieren einzuführen, Lothar M. schrieb: > Schöne Feiertage noch. Wünsche ich ebenso.
Ich hatte das oben schon gesagt, aber das wurde vollkommen ignoriert. Interrupts sind oft eine schlechte Idee für mechanische Kontakte. Man kann auch prima in SW entstören. Man muß nur mal ausrechnen, wie schnell eine Reaktion wirklich nötig ist, also z.B. wie groß der Fehler bei 1ms Delay ist.
MWS schrieb: > Lothar M. schrieb: >> MWS schrieb: >>>> Wenn ich der Betreuer wäre, >>> Du hast die Rolle des TE's nicht erfasst. >> Ich meine durchaus, die Rolle korrekt erfasst zu haben, denn > > Da musst Du genauer lesen: > > Max M. schrieb: >> Wie schon erwähnt ist das ganze ein (Industrie)Azubiprojekt (das immer >> wieder erweitert werden kann), das eigentlich den Sinn hatte, Azubis im >> Maschinenbau etwas in die Thematik Mikrocontroller und C/C++-angelehntes >> Programmieren einzuführen, > > Lothar M. schrieb: >> Schöne Feiertage noch. > > Wünsche ich ebenso. dann habt ihr euren Azubis jetzt auch beigebracht wo der Unterschied zwischen einem 13€ Arduino und einem 1000€ Industrie PLC ist! nämlich genau dort! der Thread beschreibt wunderbar den Unterschied zwischen ner Tisch-Bastellösung und einer Industrieanwendung. und ohne dissen zu wollen!!! Scheinen sich hier "grob Elektriker" im "Mechatroniker" Lehrstuhl zu versuchen. Finde ich halt fraglich wie es sein kann dass in einer Ausbildungsstätte solch fundamentales Wissen fehlt! ich bin weder elektriker noch mechatroniker, sondern Maschinenbauer, und mir wurde das in meiner Ausbildung im Fach elektrotechnik beigebracht. ich hätte es bei Gott nur mit meiner damaligen Ausbildung niemals in dieser Tiefe verstehen noch wiedergeben können - man wusste aber dass Eingänge/Ausgänge an Steuerungen immer galvanisch getrennt ausgeführt werden. Der Rahmen mit den INA Profilen sieht top professionell aus! hübsch gemacht!
Peter D. schrieb: > Ich hatte das oben schon gesagt, aber das wurde vollkommen > ignoriert. Willkommen im Club.
ahhh ja,.. ich bins ja auch nur überflogen,... Zuverlässigkeit > KONSTRUIERT man in das Gerät hinein, die Messung dient zum Nachweis bzw. > zur Fehlersuche. außer bei Grundlagenforschung :) da läuft man anfangs zick zack mäßig in verschiedene Richtungen ohne zu wissen wo die Reise hin geht :)))
Stefan ⛄ F. schrieb: > Anke schrieb: >> Das hat der TE doch schon geschrieben > > Schau mal in den Spiegel. > Denn darauf haben andere schon lange vor dir hingewiesen und ich habe > längst bestätigt, dass ich es zur Kenntnis genommen habe. Heul doch :-) Stefan ⛄ F. schrieb: > Anke schrieb: >> Kippen eine Pins mit 1KOhm Pullup kann nicht auf "ungünstige >> Leitungsführungen" geschoben werden, so etwas gibt es nicht. > > Aber sicher doch! > > Wenn z.B. das GND Niveau eines Signalgebers aufgrund von Spannungsabfall > durch Lastströme um 1,5V angehoben wird, dann "sieht" der > Mikrocontroller anstelle von einem ordentlichen LOW Pegel die 1,5V, was > nicht mehr zuverlässig funktioniert. Bei TLL IC's reichten schon 0,6V > für Fehlfunktionen. Wenn das GND Niveau um 1,5V angehoben wird, haben wir ein anderes Problem als das von Manfred angesprochene Brummen, meinst du nicht auch? Wenn GND schwankt, oder VDD, ist die ganze Schaltung Murks. Aber darum geht es ja hier gar nicht.
Peter D. schrieb: > Ich hatte das oben schon gesagt, aber das wurde vollkommen ignoriert. In einem kurzen Beitrag, in dem nicht drinstand, warum "man" das so macht. Das wäre aber wichtig gewesen, weil hier mehr Elektroniker als Maschinenbauer unterwegs sind. Der Thread hier ist zum größten Teil Off-Topic, da es meist um Elektronik geht, das eigentliche Problem aber Maschinenbau ist. Der TO hat dummerweise die falsche Fährte gelegt, weil er einen nackten Arduino einbauen wollte. Die ganze Diskussion um Pull-Up- und Pull-Down-Widerstände ist in diesem Kontext völlig deplaziert. Die Argumente sind alle richtig, gelten aber für ELEKTRONIK. Die Elektronik wird aber im Maschinenbau schön mit einer Batterie von Optokopplern eingezäunt, um sich die ganzen hier diskutierten Kleinleistungsprobleme vom Halse zu halten. Es bleiben immer noch genug Probleme übrig mit Aktoren im Kilowattbereich. Der de-facto-Standard ist einfach, daß jede Elektronik mit Optokopplern isoliert wird und ein Zwischenkreis mit 24Volt/10mA-Signalen den nötigen Informationsfluß erledigt. Das ist robust und störungsarm (und etwas teurer). Muß Entwicklungszeit bezahlt werden, ist das aber in der Summe billiger, drum macht man es. Natürlich versucht man immer wieder, billiger herzustellen. Nach ganz billig kommt aber leider ganz teuer. Der Hersteller, der mir stolz sein Lasernetzteil mit I2C als externem BUS vorgestellt hat, ist weg vom Fenster, da hat ihm auch der Berliner Förderpreis nicht geholfen. Wenn ein Arduino aber passend mit Optokopplern isoliert wird, muß er auch nicht schlechter sein als eine SPS. Für viele Steuerungsaufgaben reicht die Arduino-Programmierumgebung völlig aus. Gerade im Sondermaschinenbau spielen die Kosten für die Softwareentwicklung eine zentrale Rolle und zu den Kosten gehört auch die Einarbeitungszeit in eine Programmierumgebung. Im übrigen ist die Standard-SPS nur dann von Vorteil, wenn man entweder weltweit vertreiben will und zu eigener Ersatzeilversorgung keine Lust hat, oder wenn der Kunde eigene SPS-Programmierer hat, die eventuell nötige Änderungen selbst einpflegen können. Gruß Klaus (der soundsovielte) P.S. Tut mir leid, daß es so lang wurde. Hatte aber den Eindruck, das mußte jetzt aber dringend mal sein.
PC-Freak schrieb: > @ Stefan (stefanus) > > Deine 1,0 K Pullup's sind viel zu gering. Diese belasten das Signal nur > zu stark. Und dadurch kippt der Eingang auf HIGH? Ich fasse es nicht, ihr seit Kindergarten. Ich bin dann mal weg, tschüss und alles gute für die Zwischenprüfung ^^
Angehängte Dateien:
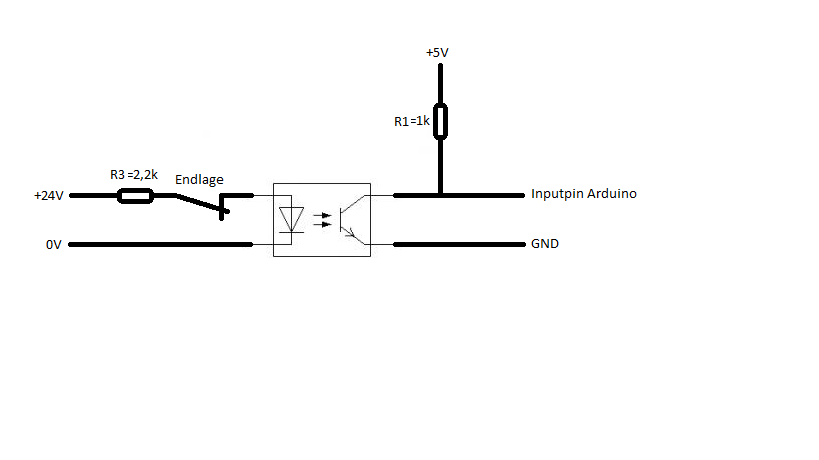
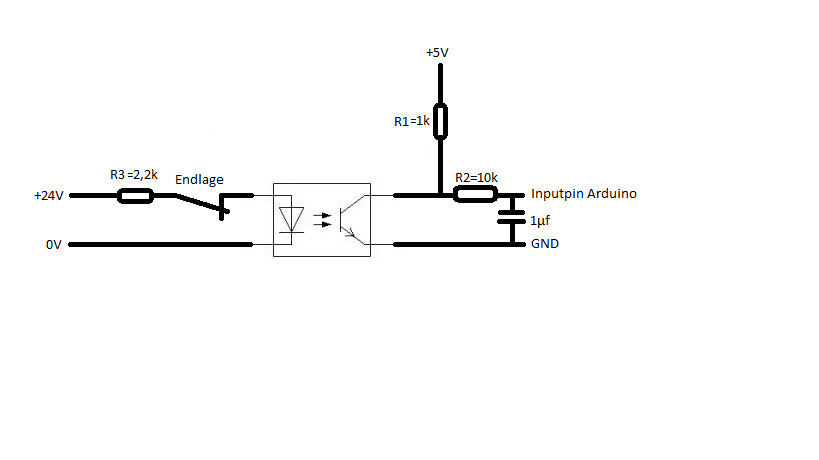
Okay, jetzt sind viele Themen diskutiert worden. Zum Punkt Oszilloskop: Steht mir leider nicht zur Verfügung, würde erst einmal ändern, was in jedem Fall geändert werden muss. Sollte das Problem dann noch bestehen, würde ich mir eins besorgen. Controllino würde ich gern verwenden, ist allerdings gerade schwierig zu besorgen wegen finanziellem Engpass und nerviger, langsamer Bürokratie... Versuch es jetzt mal mit einigen hier genannten Tipps. Leitungsführung werde ich soweit wie es geht mal ändern, zumindest mal die gebündelten Leitungen auseinander machen und die der Treiber gegen Isolierte austauschen (und am besten nicht über die Klemmen sondern direkt von Motor zu Treiber). Da ich davon ausgehe, das sich meine Steuerung mit 24V Steuerspannung keine bis kaum Störungen einfangen würde, werde ich mal Optokoppler einbauen um meine Steuerspannung auf 24V zu erhöhen (Sind die Schaltungen auf den Bildern richtig?). Ist in diesem Fall die RC-Schaltung noch notwendig (Habe jetzt mal 1μf genommen um Tau auf 10ms zu erhöhen, das sollte doch wirklich genug Zeit sein)? Falls ja, was würde gegen Software-Entprellen statt dem LP-Filter sprechen? Zu der Größe des Pullups etc. haben sich viele unterschiedlich geäußert, ich hab ihn jetzt mal auf 1k festgelegt. Falls jemand dennoch meint das ist vollkommen falsch so, belehrt mich. Sternförmiger GND-Punkt habe ich gemacht (Alle GNDs auf EINE Klemmstelle, PELV entfernt) bin aber auch hier offen für Kritik.
Mir ist noch etwas aufgefallen. Wenn ich alle Motortreiber außer einen (beliebigen) abklemme wird das Störsignal schwächer (LED sollte leuchten wenn Input HIGH, blinkt aber "wild", wenn alle Treiber angeschlossen sind und weniger "wild", wenn nur einer angeschlossen ist. So weit so logisch. Klemme ich jetzt aber 3 von 4 Motorleitungen des letzten Treibers ab, blinkt die LED immernoch etwas, also spinnt mein Input immernoch, obwohl ich doch am Motor an keiner Spule mehr einen geschlossen Stromkreis habe. Oder übersehe ich hier etwas sehr offensichtliches?
Max M. schrieb: > Oder übersehe ich hier etwas sehr offensichtliches? Natürlich: Warum machst du nicht etwas dass du auch kannst? Vielleicht wäre Gärtnern was für dich? Oder Töpfern? Aber das hier, nein sorry, das liegt dir nicht. Du bist ja nicht mal in der Lage ordentlich zu messen wo nun dein Problem liegt. Jemand der geeignet für diese Aufgabe wäre, hätte schon vor dem ersten Post, das Problem ausgemessen und behoben.
:
Bearbeitet durch User
Cyblord -. schrieb: > Natürlich: Warum machst du nicht etwas dass du auch kannst? Vielleicht > wäre Gärtnern was für dich? Oder Töpfern? Die Frage richtet sich an User, die wirklich helfen wollen!
Max M. schrieb: > Da ich davon ausgehe, das sich meine Steuerung mit 24V Steuerspannung > keine bis kaum Störungen einfangen würde Warum gehst du davon aus? Du fängst damit natürlich gleich viele Störungen ein. Sie wirken sich aber nur noch 1/5 so schlimm aus. > werde ich mal Optokoppler einbauen > (Sind die Schaltungen auf den Bildern richtig?). Welchen OK hast du da vorgesehen? Mein Vorschlag: nimm einen OK mit einem recht hohen CTR (mindestens 200%), damit du auf der µC-Seite einen brauchbaren Low-Pegel hinbekommst. > um meine Steuerspannung auf 24V zu erhöhen Für diesen Zweck reicht ein Spannungsteiler aus. Funktioniert bei mir bei zighunderttausenden 24V-Eingängen weltweit. Einen Optokoppler nimmt man nur, wenn man eine galvanische Trennung braucht und einhalten kann. > Sternförmiger GND-Punkt habe ich gemacht (Alle GNDs auf EINE > Klemmstelle, PELV entfernt) bin aber auch hier offen für Kritik. Du weißt schon, wie ein Stern aussieht? Von der gemeinsamen Mitte gehen die Strahlen auf direktem und kürzestem Weg geradeaus zu den Zacken. Entspricht das tatsächlich auch geometrisch deiner Ausführung? Wenn nicht, dann hast du eben keine "sternförmige Masse", sondern lediglich eine "zentrale Masse". > Zum Punkt Oszilloskop: Steht mir leider nicht zur Verfügung, würde erst > einmal ändern, was in jedem Fall geändert werden muss. Aber das ist doch, was ich immer sagen will: du weißt ohne Messungen doch gar nicht, was geändert werden muss. Max M. schrieb: > Klemme ich jetzt aber 3 von 4 Motorleitungen des letzten Treibers ab, > blinkt die LED immernoch etwas, also spinnt mein Input immernoch, obwohl > ich doch am Motor an keiner Spule mehr einen geschlossen Stromkreis > habe. > Oder übersehe ich hier etwas sehr offensichtliches? Kapazitive Kopplung. Der eine verlbleibende Ausgang zappelt immer noch mit der "offenen" Leitung und steilen Schaltflanken (mit einem Oszilloskop könnte man das leicht sehen...). Und der ein paar pF reichen aus, um die Störungen auf den Rest des Schaltschranks und benachbarte Leitungen einzukoppeln. Klaus S. schrieb: > Der de-facto-Standard ist einfach, daß jede Elektronik mit Optokopplern > isoliert wird Es geht aber auch anders. Meine Steuerungen laufen zigtauendfach mit einem Prozessor mit lediglich 1,1V Corespannung direkt auf Maschinenpotential. Und da sind mehr als 10 Umrichterachsen mit mehreren kW gleich nebenan im Abstand von 30cm. Das erste, was an diesem Design fertig war, war das Versorgungskonzept vom Netzeingang über den Filter, über das 24V-Schaltnetzteil und diverse POL-Wandler (5V, 3,3V, 2,5V) bis runter auf die 1,2V fürs FPGS und die 1,1V für den Prozessor.
:
Bearbeitet durch Moderator
Lothar M. schrieb: > Von der gemeinsamen Mitte gehen die Strahlen auf direktem und > kürzestem Weg geradeaus zu den Zacken. Entspricht das tatsächlich auch > geometrisch deiner Ausführung? Wenn nicht, dann hast du eben keine > "sternförmige Masse", sondern lediglich eine "zentrale Masse". Weder eine sternförmige noch zentrale Masse verhindern eine Einkopplung in große Signalschleifen. Das schaffen nur parallel zum Signal geführte Masseleitungen, praktischerweise verdrillt. Im Extremfall noch zusätzlich geschirmt UND den Schirm an der richtigen Stelle HF-tauglich verbunden.
Falk B. schrieb: > Weder eine sternförmige noch zentrale Masse verhindern eine Einkopplung > in große Signalschleifen. Ja, ist eigentlich klar. Das hatten wir schon mal beim Thema "Strompfade" und "Stromkreise" weiter oben diskutiert. Nehmen wir mal 2 Netzteile und 1 "zentrale, sternförmige Masse" so wie hier:
1 | Il |
2 | .--------->------------------------------------------. |
3 | | | |
4 | | .--------------. | |
5 | | | | | |
6 | NT 24V µC NT 5V Last |
7 | | ---------' | | |
8 | | / | | |
9 | | / | | |
10 | '------------------o--------------------------o---<--' |
11 | Sternpunkt "s" "a" Il |
Da fließt der Laststrom über das Teilstück "a" bis "s" erzeugt zusammen mit der Impedanz dieses Leitungsstücks einen Spannungsabfall. Wenn der dann z.B. 1V ist, dann wird spannenderweise schon mal die Versorgungsspannung des µC auf 6V angehoben (5V von Netzteil + 1V Spannungsabfall auf der GND-Leitung). Und ähnliche Potentialverschiebungen erfahren natürlich auch irgendwelche Schaltsignale, wenn sie ihren Signalpfad mit Leistungsströmen teile müssen. So wäre es richtig:
1 | Il |
2 | .--------->----. |
3 | | | |
4 | | | .--------------. |
5 | | | | | |
6 | NT 24V Last µC NT 5V |
7 | | | .--------' | |
8 | | \ / | |
9 | | \ / | |
10 | '------------------o---------------------------' |
11 | Sternpunkt "s" |
Der Laststrom Il fließt an direkt an den Sternpunkt und koppelt nicht in den Logikbereich ein. Und das ist jetzt nur die leitungsgebundene "Überkopplung" von einer Versorgungsschiene in die andere. Wenn eine Signalleitung dann keine neben ihr liegende Masserückleitung hat und deshalb eine große Stromschleife aufzieht, dann kommt die elektromagentische Einkopplung noch dazu (das ist u.A. das, was mit den 3 offenen und 1 angeschlossenen Motorleitung beobachtet wird).
:
Bearbeitet durch Moderator
Lothar M. schrieb: > Und das ist jetzt nur die leitungsgebundene "Überkopplung" von einer > Versorgungsschiene in die andere. Galvanische Kopplung. > Wenn eine Signalleitung dann keine neben ihr liegende Masserückleitung > hat und deshalb eine große Stromschleife aufzieht, dann kommt die > elektromagentische Einkopplung noch dazu (das ist u.A. das, was mit den Induktive Kopplung. Die ist auch leitungsgebunden. Welches von beiden hier das größere Problem ist, läßt sich aus der Ferne nicht sagen. Tendentiell ist es eher die induktive Kopplung.
Falk B. schrieb: > Tendentiell ist es eher die induktive Kopplung. Hier haben wir es noch mit der kapazitiven Kopplung zu tun: der Schrittmotortreiber zappelt mit 1 Leitung "auf" und "ab" und die koppelt kapazitiv auf die danebenliegende Signalleitung ein. Bei einer entsprechend steilen Flanke reichen da ein paar pF für eine "brauchbare" Störung.
1 | _ _ |
2 | +-24V _| |_| |_ |
3 | .---[Treiber]------------------------- offene Leitung 5V |
4 | | : | |
5 | | === Leitungskapazität 1k |
6 | | : | |
7 | | .---------------------------------------o-- µC |
8 | NT 24V | +-2V _|_ _|_ _ | |
9 | | / | | | |
10 | | | | |
11 | '------------------o-------------------------------------------' |
12 | Sternpunkt "s" |
Dass bei entsprechenden steilflankigen Signalen noch Leitungsinduktivitäten mitspielen, macht die Sache nicht einfacher...
Irgendwie macht sich bei mir inzwischen Verärgerung breit. Ich hatte ja erst geglaubt, dass ein Azubi hier nach Hilfestellung fragt. Inzwischen hat sich aber offenbar herausgestellt, dass der Der TO plant, zukünftig Azubis an diesem Aufbau ausbilden. Nun will der TO weiter herumbasteln, anstatt die zahlreichen langwierig besprochenen Schwachstellen seines Aufbaukonzepts systematisch zu beseitigen. Allein die hier erhaltene kostenlose fachliche Beratung für den TO wäre bei industrieüblicher Vergütung locker einen Tausender wert. Für Aluprofile war ein Tausender im Etat, jetzt scheitert es an ein paar Hundert Euro für eine ordentliche industrietaugliche Steuerung. Messtechnik gibt es sowieso nicht und man will die auch nicht beschaffen. Der Verdacht drängt sich auf, dass man diese auch nicht beherrschen würde, es fehlt ja offenbar an jeglichem fachlichen Grundwissen. Was sollen die Azubis an diesem Murksaufbau eigentlich lernen?
Dieter R. schrieb: > Was sollen die Azubis an diesem Murksaufbau eigentlich lernen? Sie lernen dass ein nackter Arduino kein fertiges Gerät ist, welches in einen Schaltschrank eingebaut werden kann. Ganz egal wie supi toll die ganzen Käbelchen da drin verlegt sind und wie viele Aderendhülsen da aufgepresst wurden. Es ist ein Entwicklungssystem für das Labor. Im Fall des TE sehen wir gerade, Lernen durch Schmerz. Bald hat er es kapiert.
:
Bearbeitet durch User
Dieter R. schrieb: > Was sollen die Azubis an diesem Murksaufbau eigentlich lernen? Wie man durch geballten Einsatz von Manpower ein paar Euro einsparen kann. Das ist Standard im öffentlichem Dienst, da dort die Personalkosten nicht berücksichtigt werden müssen, schließlich sind die Leute ohnehin schon da.
Max M. schrieb: > LED sollte leuchten Das finde ich z.B. sehr interessant! Denn die LED kann ich nicht im Schaltplan und auch nicht im Programm entdecken.
Stefan ⛄ F. schrieb: > (Stichwort: Wetting Current) @Stefan Hast Du dass mal gelesen? Es geht um Fremdbelag, damit dieser durchschlagen wird. Und wenn mal nach vieleicht 10 Jahren ein Mikroschalter nicht mehr will, dann tauscht man halt mal. Oh-man.
Angehängte Dateien:
-

Spannungsteiler_Arduino.png
2,5 KB -

20220401_143050.jpg
230 KB
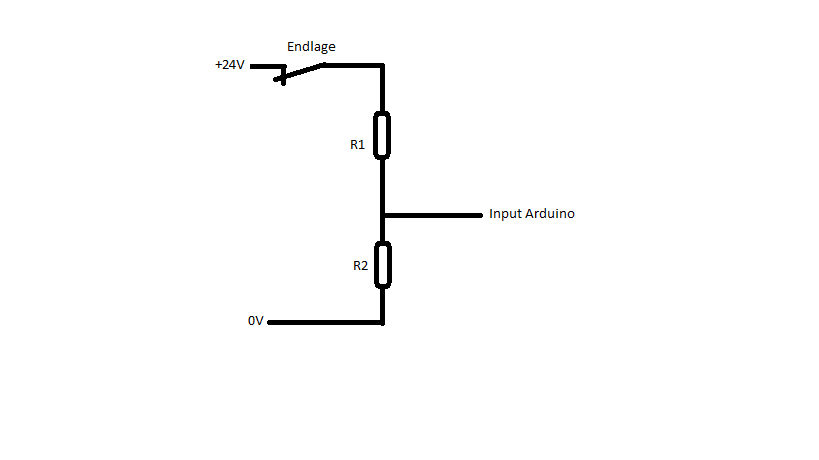
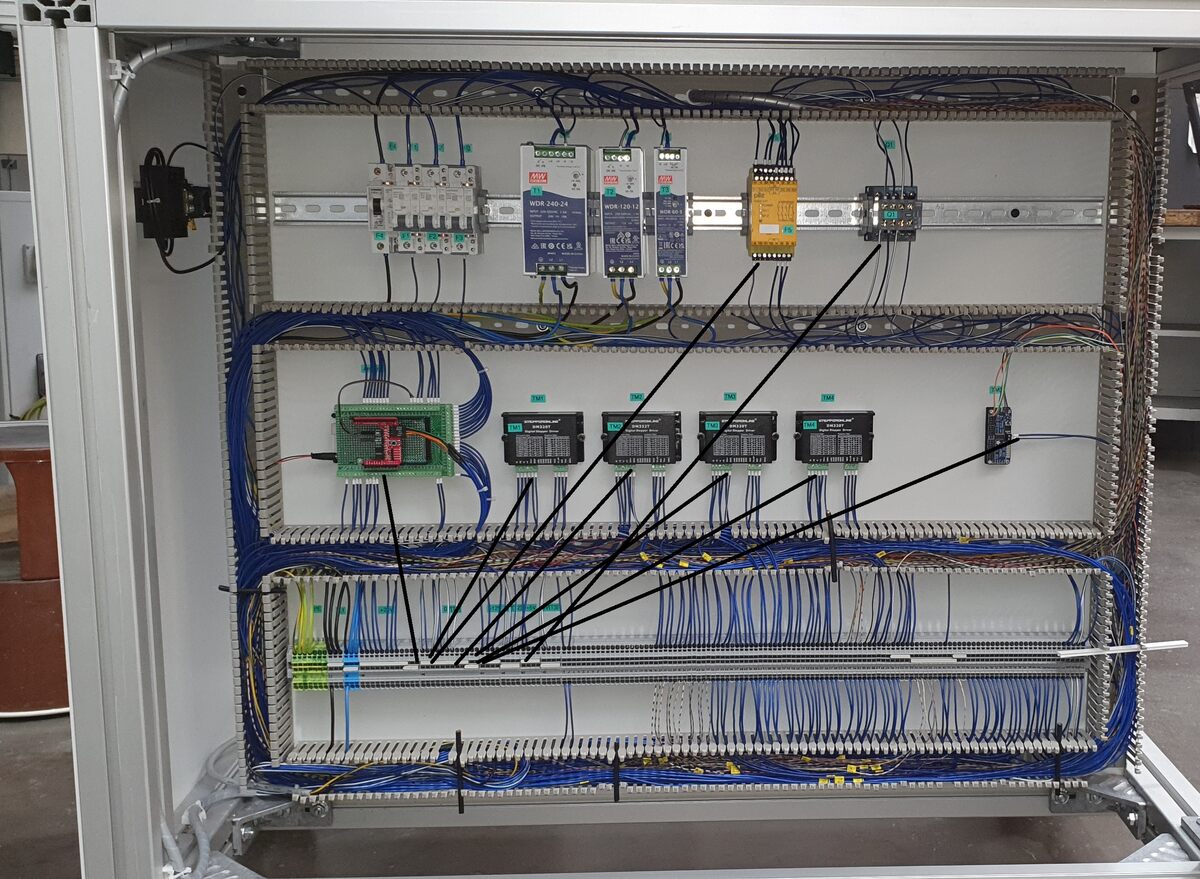
Lothar M. schrieb: > Warum gehst du davon aus? Du fängst damit natürlich gleich viele > Störungen ein. Sie wirken sich aber nur noch 1/5 so schlimm aus. Einfangen ja. Nur dass bei 24V die Störungen erheblich größer sein müssten, um den Eingangspegel von LOW auf HIGH zu setzen. Lothar M. schrieb: > Welchen OK hast du da vorgesehen? > Mein Vorschlag: nimm einen OK mit einem recht hohen CTR (mindestens > 200%), damit du auf der µC-Seite einen brauchbaren Low-Pegel > hinbekommst. Ich hatte an den 4N35 gedacht. Hat allerdings eine CTR von mind. 100%, wäre der 4N32/4N33 die bessere Wahl? Lothar M. schrieb: > Für diesen Zweck reicht ein Spannungsteiler aus. Funktioniert bei mir > bei zighunderttausenden 24V-Eingängen weltweit. Einen Optokoppler nimmt > man nur, wenn man eine galvanische Trennung braucht und einhalten kann. Okay. Passen R1=1,8k und R2=470 Ohm? So brauche ich keinen separaten Pullup mehr oder? Lothar M. schrieb: > Du weißt schon, wie ein Stern aussieht? > > Von der gemeinsamen Mitte gehen die Strahlen auf direktem und > kürzestem Weg geradeaus zu den Zacken. Entspricht das tatsächlich auch > geometrisch deiner Ausführung? Wenn nicht, dann hast du eben keine > "sternförmige Masse", sondern lediglich eine "zentrale Masse". Wie auf dem Bild, nur oben die Leitungen durch die Kanäle. Lothar M. schrieb: > Kapazitive Kopplung. Der eine verlbleibende Ausgang zappelt immer noch > mit der "offenen" Leitung und steilen Schaltflanken (mit einem > Oszilloskop könnte man das leicht sehen...). Und der ein paar pF reichen > aus, um die Störungen auf den Rest des Schaltschranks und benachbarte > Leitungen einzukoppeln. Lothar M. schrieb: > Hier haben wir es noch mit der kapazitiven Kopplung zu tun: der > Schrittmotortreiber zappelt mit 1 Leitung "auf" und "ab" und die koppelt > kapazitiv auf die danebenliegende Signalleitung ein. Bei einer > entsprechend steilen Flanke reichen da ein paar pF für eine "brauchbare" > Störung. _ _ > +-24V _| |_| |_ > .---[Treiber]------------------------- offene Leitung 5V > | : | > | === Leitungskapazität 1k > | : | > | .---------------------------------------o-- µC > NT 24V | +-2V _|_ _|_ _ | > | / | | | > | | | > '------------------o-------------------------------------------' > Sternpunkt "s" Danke für die Erklärung Dieter R. schrieb: > Nun will der TO weiter herumbasteln, anstatt die zahlreichen langwierig > besprochenen Schwachstellen seines Aufbaukonzepts systematisch zu > beseitigen. Wie meinen? Dieter R. schrieb: > Allein die hier erhaltene kostenlose fachliche Beratung für > den TO wäre bei industrieüblicher Vergütung locker einen Tausender wert. Dafür ist doch diese Forum da oder etwa nicht? Ich zwinge niemanden zu beraten, wenn er das nicht will! Dieter R. schrieb: > Für Aluprofile war ein Tausender im Etat, jetzt scheitert es an ein paar > Hundert Euro für eine ordentliche industrietaugliche Steuerung. Viele der Komponenten waren bereits vorhanden oder wurden vor mehreren Monaten gekauft. Mittlerweile: Firma = wenig Geld = ich darf mir nicht alles kaufen was ich will. Dass es an den paar Hundert Euro scheitert kotzt mich am meisten an. Deswegen muss ich mich aber nicht dafür rechtfertigen. Dieter R. schrieb: > Der Verdacht drängt sich auf, dass man diese auch nicht > beherrschen würde Ganz richtig, mit einem Oszilloskop habe bisher kaum gemessen. Wurde mir schlichtweg nicht beigebracht... Wobei ich da eher den Fehler bei der Berufsschule sehe als bei meinem Betrieb! So wie ich in meinem Beruf leider viele Dinge in Sachen Elektrotechnik oder Programmieren nicht lerne (die ich aber gerne können würde) oder dabei nicht in die Tiefe gegangen wird (Weil einige Azubis eben oft auch nicht die hellsten Kerzen auf der Torte sind). Unter anderem deswegen werden Projekte wie dieses ins Leben gerufen, um daran zu lernen und sich Wissen anzueignen, für die die mehr wollen. Und wo man nicht weiterkommt, kann z.B. ein Forum helfen, was bisher ja gut funktioniert hat. Wie gesagt, für konstruktive Kritik bin ich sehr offen!
EAF schrieb: > Das finde ich z.B. sehr interessant! > Denn die LED kann ich nicht im Schaltplan und auch nicht im Programm > entdecken. Natürlich nicht! Es wurde die eingebaute LED verwendet und ein einfacher sketch zum Auslesen von Inputs (Serieller Monitor geht natürlich auch). Und selbst wenn ich eine LED zur Fehlersuche eingebaut hätte, trage ich die doch nicht in den Schaltplan ein, um sie nach abgeschlossener Fehlersuche wieder auszutragen...
Beitrag #7039167 wurde von einem Moderator gelöscht.
Max M. schrieb:
... viel.
kurz und für dich schmerzhaft:
Wenn du WIRKLICH den Anspruch hast, deinen Azubis mehr beizubringen, als
du (wie du selbst bedauerst) mal gelernt hast, dann gib dir einen Ruck
und beseitige die Defizite, und zwar gründlich.
1. Oszilloskop kaufen und lernen, damit umzugehen. Bei deinem Chef auf
den Putz hauen oder zähneknirschend privat. Muss ja nicht so teuer sein,
aber robust und Service-tauglich.
2. Vorhandene Verdrahtung rausreißen.
3. Interface-Board (Shield) selbst designen, layouten und aufbauen. Ist
vermutlich weit über deinen gegenwärtigen Fähigkeiten. Entweder mit
Literatur- und Forumshilfe diese Fähigkeiten erwerben oder sein lassen.
Wenn es was wird (dauert sicher länger), wird es mal ein TOLLES
Lernobjekt für die Azubis. Wäre meine bevorzugte Lösung, aber mit vielen
Abers...
4. Wenn nicht 3., dann professionellen Controller kaufen. Bei deinem
Chef auf den Putz hauen ...
5. Neuverdrahtung, Signalpfade trennen, abgeschirmte Leitungen, direkt
am Controller, wurde hier x-mal durchgekaut.
Dieter R. schrieb: > 3. Interface-Board (Shield) selbst designen, layouten und aufbauen. Ist > vermutlich weit über deinen gegenwärtigen Fähigkeiten. Es reicht, für die wenigen Endlagenschalter einfach den Pull-Up + RC-Filter einzubauen, das kriegt man auf dem Lochraster hin. Damit sind 90% der Probleme gelöst. Aber wenn ein halbes Dutzend Leute auf einen einreden, verliert man schon mal die Orientierung.
Falk B. schrieb: > Es reicht, für die wenigen Endlagenschalter einfach den Pull-Up + > RC-Filter einzubauen, das kriegt man auf dem Lochraster hin. Damit sind > 90% der Probleme gelöst. Nur kann man auch hier anderer Meinung sein. 24V Eingänge sollte einer entsprechenden Eingangsklasse der SPS-Norm entsprechen. Gerade wenn die im Schaltschrank zum Einsatz kommen. Das wird dort einfach erwartet. Dafür gibts fertige Eingangsbausteine. Aber die muss man halt auch verwenden. Dann sind ja nicht nur die Eingänge grottig. Auch die ganze Versorgung der Arduino-Platine würde ich so nicht einfach da reinhängen. Dieter hat hier einfach recht: Entweder man nimmt einen Baustein der das alles mitbringt oder man designt das Ding komplett selbst. Eigentlich gehört da eine S7-1200 o.ä. rein und fertig.
:
Bearbeitet durch User
Max M. schrieb: > Natürlich nicht! Es wurde die eingebaute LED verwendet und ein einfacher > sketch zum Auslesen von Inputs (Serieller Monitor geht natürlich auch). > Und selbst wenn ich eine LED zur Fehlersuche eingebaut hätte, trage ich > die doch nicht in den Schaltplan ein, um sie nach abgeschlossener > Fehlersuche wieder auszutragen... Natürlich muss man sofort wissen, dass du die eingebaute LED verwendest, welche zudem noch von der aufgesetzten Platine abgedeckt wird. Total logisch. Mein Fehler! Bei dem geheime Programm, da muss ich ja auch sofort wissen/erahnen, was du da für Tricks verwendet hast, um Störungen zu erkennen/unterdrücken. Logisch! Mein Fehler! Bin halt zu doof. Ich tue mir selber leid, dass ich dein Gejammer (um die zappelnde LED) ernst genommen habe, nach einem Programm gesucht habe, welches das tun könnte und die Schaltung mit/durch der das passiert. Sei beruhigt, kommt nicht mehr vor. Ja, so wird das mit der Diagnose und der Behebung sicher was.....
Falk B. schrieb: > das kriegt man auf dem Lochraster hin. Klar geht das. Ich hatte allerdings vor meinem geistigen Auge eine INDUSTRIE-taugliche Lösung, an der zukünftige Azubis etwas lernen können, keinen Bastelkram.
Dieter R. schrieb: >> das kriegt man auf dem Lochraster hin. > > Klar geht das. Ich hatte allerdings vor meinem geistigen Auge eine > INDUSTRIE-taugliche Lösung, an der zukünftige Azubis etwas lernen > können, keinen Bastelkram. Im Moment geht es darum, die Störung zu beseitigen. Wenn man das geschafft hat, kann man auch über eine schöne, geätzte Platine nachdenken.
Falk B. schrieb: > Im Moment geht es darum, die Störung zu beseitigen. Wenn man das > geschafft hat, kann man auch über eine schöne, geätzte Platine > nachdenken. Da sind wir eben anderer Meinung. Im Moment geht es daran, erst einmal die VORAUSSETZUNGEN für einen industrietauglichen Aufbau zu schaffen. Die Schritte dazu hatte ich geschildert. Nicht erst basteln, bis es notdürftig geht. Erst planen und konstruieren! Der funktionierende Gesamtaufbau kommt dann - und wenn er nicht wie geplant funktioniert, dann kommt Debugging, aber nicht vorher. DAS sollten die Azubis lernen, der TO auch. Das nötige Interface-Board ist nicht so kompliziert, dass man vorher einen Lochrasteraufbau bräuchte. Das kann man gleich bauen. Und falls es tatsächlich einen Fehler enthält, dessen Beseitigung mehr als eine Drahtbrücke erfordert, macht man eine neue Revision.
Wie gesagt, ich werde genannte Punkte nach meinen Möglichkeiten umsetzen in der Hoffnung, dass der Fehler so ersteinmal schnell beseitigt ist. Den Anspruch an ein eine Industrietaugliche Lösung habe ich natürlich! Nur muss davor der Fehler ersteinmal behoben sein. Dieter R. schrieb: > Wenn du WIRKLICH den Anspruch hast, deinen Azubis mehr beizubringen, als > du (wie du selbst bedauerst) mal gelernt hast, dann gib dir einen Ruck > und beseitige die Defizite, und zwar gründlich. Weil ich selber nur der Azubi bin und das Projekt mit, in diesem Fachbereich beschränktem Wissen (puncto Lernwilligkeit), in Eigenregie betreibe, habe ich es persönlich nicht in der Hand was ich gestellt bekomme und was nicht. Ich kann nur versuchen, mit dem Gegebenen bestmöglich zu arbeiten. Wenn das Ding ersteinmal funktioniert, sind die Ohren für weitere Investitionen zur Industrietauglichkeit mit Sicherheit offener. So weit danke für die Hilfe
Max M. schrieb: > Weil ich selber nur der Azubi bin Also doch. Das klang zwischendurch anders bzw. war missverständlich, sodass nicht nur ich es fehlinterpretiert habe. Dann ist die Lochrasterplatine wohl doch das Mittel der Wahl. Trotzdem solltest du ALLE Signal- und Steuerleitungen (und vermutlich einen Teil der Stromversorgung) neu verdrahten (geschirmt), auch wenn es eine Menge Arbeit macht. Oder besser, alles raus, komplett neu verdrahten, vorher Baugruppen so umsetzen, dass Netzspannung und Niederspannung vollständig getrennt sind. Motto: erst einmal eine saubere Basis schaffen. Viel Erfolg!
Nachfrage: 1. Du könntest dir selbst und allen, die dir vielleicht noch helfen werden/müssen/sollen ungeheuer helfen, indem du einen LESBAREN Schaltplan erstellst, ggf. hierarchisch, der möglichst den ganzen Aufbau zeigt, mindestens aber die Anschlüsse (mit genauer Pinbelegung) am Arduino. Alles so beschriftet, dass man versteht, was da gemeint ist. Bei deinem handschriftlichen Zettel kann ich zumindest vieles nur raten. 1.1. Alternativ (oder vorab) eine Pinbelegungsliste mit eindeutiger Benennung der Signale. 2. Was ist das für ein Board/Shield, auf dem der Arduino sitzt? Typ, Hersteller, Datenblatt? Hat das nur Schraubklemmen oder noch weitere Funktionen (Lochraster)?
@Max: Lass dir hier nicht zuviel dummes Zeug erzählen. Worans jetzt genau liegt, kann man momentan schlecht sagen. Aber mal zum Vergleich was Störungen angeht funktioniert(e) zB. auch sowas: https://www.google.com/search?q=c64+expansionsport
Dieter R. schrieb: > 1. Du könntest dir selbst und allen, die dir vielleicht noch helfen > werden/müssen/sollen ungeheuer helfen, indem du einen LESBAREN > Schaltplan erstellst, ggf. hierarchisch, der möglichst den ganzen Aufbau > zeigt, mindestens aber die Anschlüsse (mit genauer Pinbelegung) am > Arduino. Alles so beschriftet, dass man versteht, was da gemeint ist. > Bei deinem handschriftlichen Zettel kann ich zumindest vieles nur raten. > > 1.1. Alternativ (oder vorab) eine Pinbelegungsliste mit eindeutiger > Benennung der Signale. Wie gesagt, die Schaltpläne habe ich bewusst ersteinmal in der Form gemacht, da ich sowieso nur alleine daran arbeite. Hätte ich vorher gewusst, dass es von nöten sein wird, dass mehrere Leute das lesen werden, hätte ichs andes gemacht. Kommt alles wenn die Funktion ersteinmal gegeben ist und ich keine Änderungen mehr vornehmen muss. Dieter R. schrieb: > 2. Was ist das für ein Board/Shield, auf dem der Arduino sitzt? Typ, > Hersteller, Datenblatt? Hat das nur Schraubklemmen oder noch weitere > Funktionen (Lochraster)? Ist ein einfaches Shield ohne Intelligenz wo alle Pins auf Klemmen gehen. Das Lochraster in der Mitte ist auch zum Teil mit den Pins verbunden. https://www.amazon.de/ARCELI-Prototyp-Schraube-Klemmenblock-Arduino/dp/B07CQW5WSX/ref=asc_df_B07CQW5WSX/?tag=googshopde-21&linkCode=df0&hvadid=309987496240&hvpos=&hvnetw=g&hvrand=17463596543678359520&hvpone=&hvptwo=&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=9042158&hvtargid=pla-617111616368&psc=1&th=1&psc=1&tag=&ref=&adgrpid=59823103337&hvpone=&hvptwo=&hvadid=309987496240&hvpos=&hvnetw=g&hvrand=17463596543678359520&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=9042158&hvtargid=pla-617111616368
Angehängte Dateien:
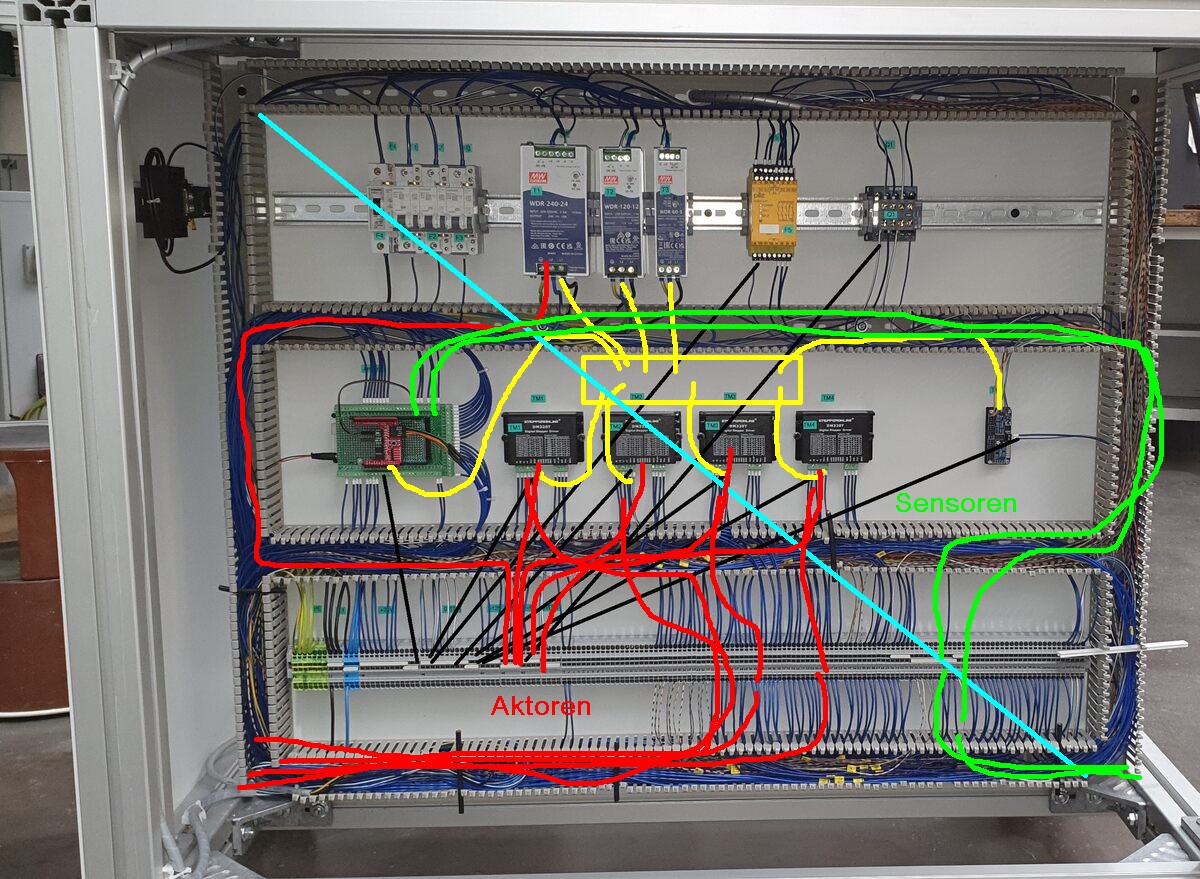
{kind=link}
Max M. schrieb: > Lothar M. schrieb: >> Für diesen Zweck reicht ein Spannungsteiler aus. Funktioniert bei mir >> bei zighunderttausenden 24V-Eingängen weltweit. Einen Optokoppler nimmt >> man nur, wenn man eine galvanische Trennung braucht und einhalten kann. > Okay. Passen R1=1,8k und R2=470 Ohm? Die Richtung stimmt. Allerdings solltest du den µC-Pin ein wenig hochohmiger "abkoppeln". Denn wenn da mal 30V statt 24V kommen, dann fließt Strom über den Eingangspin auf die 5V-Versorgung des µC. Dieser Strom sollte etwas besser begrenzt werden. Machs so, dann siehst du auch gleich, ob der Schalter ein oder ausgeschaltet ist:
1 | :-----------> nahe beim µC |
2 | : |
3 | 24V ---'\------------------. |
4 | | |
5 | 1k8 |
6 | | |
7 | V |
8 | - LED |
9 | | |
10 | o---4k7---o-------- µC-Eingang |
11 | | | |
12 | 470 === 100n |
13 | | | |
14 | GND -----------------------o---------o--------- µC-GND |
Wenn du unsere beiden "Spannungsteilerschaltpläne" mal ansiehst, dann erkennst du übrigens einen Unterschied in der Denkweise: für dich geht vom Spannungsteiler nur 1 Leitung weg zum µC-Eingang. Die Masse alias 0V erledigt sich irgendwie irgendwo irgendwann. Für mich geht immer auch die Masseleitung parallel zum Signal mit! > Lothar M. schrieb: >> Du weißt schon, wie ein Stern aussieht? >> Von der gemeinsamen Mitte gehen die Strahlen auf direktem und >> kürzestem Weg geradeaus zu den Zacken. Entspricht das tatsächlich auch >> geometrisch deiner Ausführung? > Wie auf dem Bild, nur oben die Leitungen durch die Kanäle. Ja, das ist jetzt halt echt bitter verbockt. Zentral und Sternförmig hieße, dass da ein Klemmenblock tatsächlich zentral zwischen den Netzteilen und dem Andruiden sitzt und die Masseleitungen auf kurzem Weg ohne großartige Schlingen und Schlaufen dort zusammengehen. Und dann würde ich das Ganze konzeptionell trennen: die Leistungsseite (230V und Aktoren) ist links unten, die Sensren werden rechts oben verkabelt (im Idealfall gehört der Andruide dann auch nach rechts, das kannst du in meiner Skizze sicher leicht nachvollziehen...). Und letztendlich werden die Schrittmotoren nicht großformatig und weiträumig über Klemmen angeschlossen, sondern jeweils in eine 4-adrige geschirmte Leitung zusammengefasst und der Schirm nahe (und "nahe" sind dann wirklich nur 5cm) bei den Schrittmotortreibern auf den PE (Montageplatte) gelegt.
:
Bearbeitet durch Moderator
Max M. schrieb: > Wie gesagt, die Schaltpläne habe ich bewusst ersteinmal in der Form > gemacht, da ich sowieso nur ALLEINE daran arbeite. Ach. Ist dir aufgefallen, dass mittlerweile das halbe Forum daran mitarbeitet und versucht, dir zu helfen? Vielleicht, nur mal so als klitzekleine Anregung, solltest du so freundlich sein und denen das Helfen erleichtern, indem du ordentlich dokumentierst?? Btw., das hilft auch dir, weil du lernst, systematisch Top-Down vorzugehen!!! Falls du das in der Berufsschule nicht gelernt hast. > Ist ein einfaches Shield ohne Intelligenz wo alle Pins auf Klemmen > gehen. > Das Lochraster in der Mitte ist auch zum Teil mit den Pins verbunden. Fasse dich kurz: https://www.amazon.de/ARCELI-Prototyp-Schraube-Klemmenblock-Arduino/dp/B07CQW5WSX Nächste Frage: was ist denn da noch drauf? Den Arduino finde ich auf dem Bild nicht, bei der Auflösung ist das aber auch nur Pixelsalat. Ist der auf der Unterseite (???) Auf der Oberseite sehe ich ein U-förmig erscheinendes rotes Ding. Was ist das?
Dieter R. schrieb: > Max M. schrieb: > >> Wie gesagt, die Schaltpläne habe ich bewusst ersteinmal in der Form >> gemacht, da ich sowieso nur ALLEINE daran arbeite. > > Ach. Ist dir aufgefallen, dass mittlerweile das halbe Forum daran > mitarbeitet und versucht, dir zu helfen? Kann es sein, daß du ein Helfersyndrom hast? > https://www.amazon.de/ARCELI-Prototyp-Schraube-Klemmenblock-Arduino/dp/B07CQW5WSX > > Nächste Frage: was ist denn da noch drauf? Den Arduino finde ich auf dem > Bild nicht, Der steckt darunter, wo sonst! Dieser "Shield" ist sinnlos, denn dort sind die Klemmen direkt an die Pins vom Arduino geführt. Die müßte man jetzt unterbrechen und die Spannungsteiler + RC-Filter einfügen. Für eine handvoll Signale wäre das ggf. machbar, darüber wird es sinnlos. Meine Empfehlung. Man nehme eine Lochrasterplatine im Euroformat und löte dort 5,08mm Klemmenblöcke drauf. Dann kann man die Verbindung zu den Stiftleisten des Arduino mit den Spannungsteilern herstellen. Man muss nur beachten, daß oben links beim Arduiino die eine Stiftleiste nicht ins 0,1'' Raster paßt, die Pins sind damit nicht verfügbar. Aber der Mega hat ja genug. bei der Auflösung ist das aber auch nur Pixelsalat. Ist der > auf der Unterseite (???) Auf der Oberseite sehe ich ein U-förmig > erscheinendes rotes Ding. Was ist das? Eine weitere Platine mit einer Schnittstelle.
Dieter R. schrieb: > Max M. schrieb: > >> Wie gesagt, die Schaltpläne habe ich bewusst ersteinmal in der Form >> gemacht, da ich sowieso nur ALLEINE daran arbeite. > > Ach. Ist dir aufgefallen, dass mittlerweile das halbe Forum daran > mitarbeitet und versucht, dir zu helfen? Max M. schrieb: > Hätte ich vorher > gewusst, dass es von nöten sein wird, dass mehrere Leute das lesen > werden, hätte ichs andes gemacht. ... Dieter R. schrieb: > Auf der Oberseite sehe ich ein U-förmig > erscheinendes rotes Ding. Was ist das? Das ist das Shield für das Display. Alles klar, danke. Dann mache ich mich jetzt mal Schritt für Schritt ans Werk.
Lothar M. schrieb: > Machs so, dann siehst du auch > gleich, ob der Schalter ein oder ausgeschaltet ist: > :-----------> nahe beim µC > : > 24V ---'\------------------. > | > 1k8 > | > V > - LED > | > o---4k7---o-------- µC-Eingang > | | > 470 === 100n > | | > GND -----------------------o---------o--------- µC-GND Und genau so mache ich es auf keinen Fall! Der gestörte GND von außen darf nicht auf den sensiblen MC durchgeschleift werden. Damit wirst Du weiterhin Schiffbruch erleiden, das garantiere ich Dir. Nimm die Optokopplervariante, die ist Anfängertauglich.
Falk B. schrieb: > Kann es sein, daß du ein Helfersyndrom hast? Na, die langen Posts sind von dir. Ich bemühe mich, kurz nach relevanten Informationen zu fragen. Kriege bloß keine kurzen Antworten. Btw. finde ich das Thema interessant, auch als eigener Lerneffekt, ich würde es nur gerne kompakter abarbeiten. > Der steckt darunter, wo sonst! Ja, das war meine Frage. Ich bin NICHT der Arduino-Experte. Ich sehe bloß dauernd Bilder, wo er oben drauf steckt. Scheint mir auch irgendwie sinnvoller, wenn man an USB/Ethernet will. > Dieser "Shield" ist sinnlos Genau! > Meine Empfehlung. Man nehme eine Lochrasterplatine im Euroformat Das ist ja gerade die elende Diskussion. In der halben Zeit, wo man das gebastelt hat, hat man ein ordentliches Layout fertig. > Eine weitere Platine mit einer Schnittstelle. Danach hatte ich gefragt. Hat die auch irgendeine Funktion? Erwähnt wurde sie bisher offenbar nicht. Ein Schaltplan wäre hilfreich. Ach, was sage ich ... Aber während ich das schreibe, hat Max ja schon die wesentlichen Fragen beantwortet. Denn man los!
:
Bearbeitet durch User
Peter D. schrieb: > Der gestörte GND von außen darf nicht auf den sensiblen MC > durchgeschleift werden. Damit wirst Du weiterhin Schiffbruch erleiden, > das GARANTIERE ich Dir. > Nimm die Optokopplervariante, die ist Anfängertauglich. Kurze Antwort: Blödsinn. Lange Antwort: Wenn am Eingang jeweils ein Schalter mit einem abgeschirmten Kabel angeschlossen ist, dann gibt es keine Ground-Verschleppung. Wenn ich die Aufgabe richtig verstehe, dann ist dies bei ALLEN Digital-Eingängen hier gegeben, also Null Risiko. Hervorhebung von mir. Genau können wir das beurteilen, wenn Max die Doku fertig hat. Soll ja bald sein.
Kurzer Exkurs ins Marketing, bevor sich noch mehr Leute hier blamieren: Ein "Shield" ist nicht das, was sich ein Techniker drunter vorstellt, sondern einfach der neuhochdeutsche Name für eine Erweiterungskarte im Arduinolager. Bei RaspberryPi heißt das "Hat" und im BeagleBone-Lager "Cape". Und ein Programm für die CPU heißt im Arduinolager "Sketch". Meine Arbeitshypothese: Das ist einfach eine Folge der Tatsache, daß Technik immer komplizierter wird und deshalb die Marketingfuzzis in der Mehrheit sind. Gruß Klaus (der soundsovielte) P.S. zerreißt mich in der Luft, wenn ihr den Hinweis unnötig fandet ;-)
Klaus S. schrieb: > Kurzer Exkurs ins Marketing, bevor sich noch mehr Leute hier blamieren: > > Ein "Shield" ist nicht das, was sich ein Techniker drunter vorstellt, > sondern einfach der neuhochdeutsche Name für eine Erweiterungskarte im > Arduinolager. > Bei RaspberryPi heißt das "Hat" und im BeagleBone-Lager "Cape". > Und ein Programm für die CPU heißt im Arduinolager "Sketch". > > .... ..und dann wären da zB. noch die "Treiber" für die Schrittmotoren... https://www.google.com/search?q=arduino+schrittmotor+treiber ..und ein Sketch ist eigentlich ein Programm bzw. eine App, also zB. Processing, dh. eine Java-Klasse... https://www.google.com/search?q=sketch+processing+java Nuja.
Max M. schrieb: > Dieter R. schrieb: >> Auf der Oberseite sehe ich ein U-förmig >> erscheinendes rotes Ding. Was ist das? > > Das ist das Shield für das Display. NACHFRAGE: Was macht dieses Display-Anschluss-Shield-Ding anders als ein direkter Anschluss an dem ARCELI-Prototyp-Shield? Ist das ein Pegelwandler (RS-232)? Typ, Spezifikation, Bezugsquelle/Link?
Weil mich die grundsätzliche Anforderung gereizt hat (wie macht man weitverbreitete Hacker-Hardware industrietauglich, nicht ideal, aber funktionssicher und mit handhabbarem Aufwand) hab ich hier mal was zum Thema eingestellt: Beitrag "Arduino Mega 2560, schaltschranktauglich" Es ist NICHT spezifisch für Max's Anforderungen, vermutlich kann er aber sein Programm dafür aber anpassen, wenn er denn mal seine I/Os sauber dokumentiert hat. Ich selbst habe es NICHT mit seinem Schaltplan verglichen, das ist mir einfach zu unleserlich und unstrukturiert. Warum ich das gemacht habe? Aus alter Erinnerung, mein allererstes Projekt war die Steuerung von Analysegeräten in einem bodenkundlichen Labor mit einem Heathkit-Rechner, samt zentraler Datenerfassung und Ausdruck der Ergebnisse. Der Laborleiter war mächtig stolz auf seine Lösung, der gesamte Rest der Branche machte das (zumindest hat er mir das so erzählt) mit handgeführten Listen. Später gab's dann PDP-8 und PDP-11 für solche Zwecke, Kostenfaktor gegenüber der Heathkit-Lösung nahezu unendlich, gelohnt hat es sich offenbar trotzdem, ich hatte damit aber nichts weiter zu tun. Für fachliches Feedback wäre ich dankbar, auch von Max, ob er das so (oder mit Änderungen) brauchen kann.
So, nach einiger Zeit melde ich mich mal wieder. Hatte etwas zu tun mit Prüfungsvorbereitung und anderen Arbeiten (und Urlaub ;). Was ich gemacht habe: -Die Leitungen der Treiber rausgerissen und geschirmte Leitungen (Für jeden Treiber eine 4-Adrige) räumlich getrennt von den Endlagenleitungen verlegt. -PELV-System entfernt und den Schirm geerdet -vor die Inputs der Endlagen und des NotAus RC-Filter mit 100n + Spannungsteiler (Statt auf GND auf +24V) + externen Pulldown Widerstand Und es funktioniert! Keine Störungen der Inputs mehr! Werde noch die Schaltpläne in Form bringen und das Teil fertig programmieren. Und im Optimalfall wird noch etwas Geld für eine geeignete Steuerung locker. Allzu viel werde ich aber nicht mehr daran arbeiten können (Abschlussprüfung). Das werden dann meine Kollegen übernehmen. Nochmals vielen Dank für die vielen Ratschläge und die große Hilfsbereitschaft!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.