Als "Rentner" möchte ich ein Projekt doch noch realisieren. Die Idee ist zwar schon älter, aber nicht schlechter geworden. Es geht um das Transportieren und Verschieben von Regalböden. Die nötige Steuerelektronik ist noch kein Thema, aber es ist ja sinnvoll, die mechanischen Komponenten bereits auf die spätere Steuerung auszulegen. Dazu sind 4 Schneckengetriebemotore nötig. Frage: DC oder Schrittmotore? Es soll möglichst leise funktionieren. Anfahren und Bremsen mit Rampe, Positioniergenauigkeit bei ca.1-3 Zehntel Millimeter. Die Steuerung muss den Ablauf der 4 Verfahrwege steuern. Niemals dürfen Motore starten, wenn die Böden nicht in der vorgesehen Endposition sind. Nach Stromausfall oder Abschalten muss sichergestellt sein, das erst der aktive Verfahrweg beendet wird, bevor der Ablauf weiter geht. Schön wäre noch, wenn man die 10- 20 Regalböden nummerieren könnte, und nach Eingabe auf einem Tastenfeld der passende Boden in Endposition fährt Die gesamte Anlage ist eingehaust, Berühren nicht möglich. Von solchen Steuerungen habe ich Null Ahnung. Aber erst mal kümmere ich mich um die aufwendige Mechanik. Welche Motoren und Positionierschalter soll ich einplanen? Viele Grüße Bernd
Bernd F. schrieb: > Frage: DC oder Schrittmotore? Kommt auf die benötigte Leistung an. Schneckengetriebe sind eh selbsthemmend, dass Schrittmotore ebenso wie DC Motore stromlos ihre Position nicht mehr halten spielt also keine Rolle. Ein Schrittmotor bewegt z.B. den Kopf einer Floppylaufwerks, also eher leichtes, oder die Achsen einer Hobby-Fräsmaschine, also im kg-Bereich. Bessere CNC verwenden kräftigere Motoren, ebenso die KFZ Hebebühne, da geht es dann um 10kg bis Tonnen, mit Servomotoren bis zu Drehstrom-Asynchron. Du solltest also vorher die benötigte Antriebsleistung ausrechnen, Gewicht, Geschwindigkeit, Untersetzung, Getriebewirkungsgrad. Wie du an (Tintenstrahl) Druckern siehst wo jeder cent gespart wird sind DC Motoren die kostengünstigste Lösung. Wenn es aber um 20 Böden geht von denen nur einer bewegt werden soll, könnte eine Lösung bei der ein Motorantrieb mechanisch an den einen gewünschten Boden gekoppelt wird sinnvoller sein.
Bernd F. schrieb: > Es geht um das Transportieren und Verschieben von Regalböden. > Die nötige Steuerelektronik ist noch kein Thema, aber es ist > ja sinnvoll, die mechanischen Komponenten bereits auf die spätere > Steuerung auszulegen. Dann sehe ich da erstmal die mechanischen Themen im Vordergrund. Die wirst du als erstes lösen müssen, ohne dich bereits auf irgendeinen Mikrocontroller festlegen zu müssen.
Rainer W. schrieb: > Dann sehe ich da erstmal die mechanischen Themen im Vordergrund. Da habe ich aus irgendeinem Grund bei Bernd die wenigsten Bedenken. Mit Metall kann der umgehen, jedenfalls haben seine Beiträge in der Vergangenheit diesen Eindruck deutlich aufkommen lassen.
Hallo Michael, das Schulwissen ist schon arg eingerostet. Also: Das Kettenrad (Antrieb) hat 40 mm Wirkdurchmesser. Die Transportkette soll ein Last von max. 500N heben. 100 mm Verfahrweg in ca. 5 sec. Da komme ich auf folgende Anforderungen für einen Motor: Drehmoment: 10-15 Nm (Lagerreibungen?). Drehzahl: 10-12 U/min Leistung ca. 0,02 kW Soweit richtig? Grüße Bernd
Habe ich das richtig verstanden, du möchtest ein Paternosterregal bauen? Viele Grüsse Ove
Schrittmotoren halte ich nur dann für sinnvoll, wenn man damit ohne Sensorik positionieren kann und muss. Im aktuellen Fall scheinen mir Sensoren (Positionierschalter) ohnehin notwendig, daher taugen auch andere Motoren. Die Nachteile von Schrittmotoren würde ich mir in diesem Fall nicht freiwillig antun.
:
Bearbeitet durch User
Beitrag #7636413 wurde vom Autor gelöscht.
Ove M. schrieb: > Habe ich das richtig verstanden, du möchtest ein Paternosterregal bauen? > Viele Grüsse Ove Nicht ganz. Sowas gibt es doch schon. Eine Sammlervitrine mit wechselnder Ansicht soll das werden. Das heißt: Die ausgelegten Stücke sollen nicht verrutschen bei Bewegungen der Regalböden. Also muss alles sanft passieren. Da käme dann die Steuerung ins Spiel. Die Mechanik ist zwar nicht profan, aber lösbar. Grüße Bernd
Wäre es eine Überlegung wert, das ganze für Handantrieb (Kurbel) zu konstruieren? Das ist dann eine rein mechanische Übung. Wenn das funktioniert, kann man die Kurbel durch einen Motor ersetzen ...
Bernd F. schrieb: > Eine Sammlervitrine mit wechselnder Ansicht soll das werden. 0,1mm Positioniergenauigkeit scheint mir dafür übertrieben. Bernd F. schrieb: > Die Steuerung muss den Ablauf der 4 Verfahrwege Klingt zu aufwändig. Gehen wir mal davon aus, das nur ein Regalboden von oben, unter einer Glasabdeckung sichtbar sein soll und 10 darunter warten, dann tut es ein Paternoster sehr wohl: man muss nur jeden Regalboden in 2 Streifen teilen, und die obersten beiden bilden nicht am höchsten Punkt, sondern nebeneinander, die Präsentationsfläche. Steuerung superprimitiv: so lange fahren bis das gewünschte oben sichtbar ist. Wenn man die Abstände klein haben will, kann sogar rein mechanisch die lange Bewegung die oben den Regalboden horizontal verschiebt von der Bewegung die ihn hoch und runter transportiert entkoppelt werden, ganz ohne 4 Motoren, nur mit (Getriebe, alles was Bewegung umsetzt heißt in der Mechanik Getriebe), hoch/runter wird also nur einen Teil mitgeschleppt.
Angehängte Dateien:
-

WP_20211127_15_30_03_Pro.jpg
220 KB
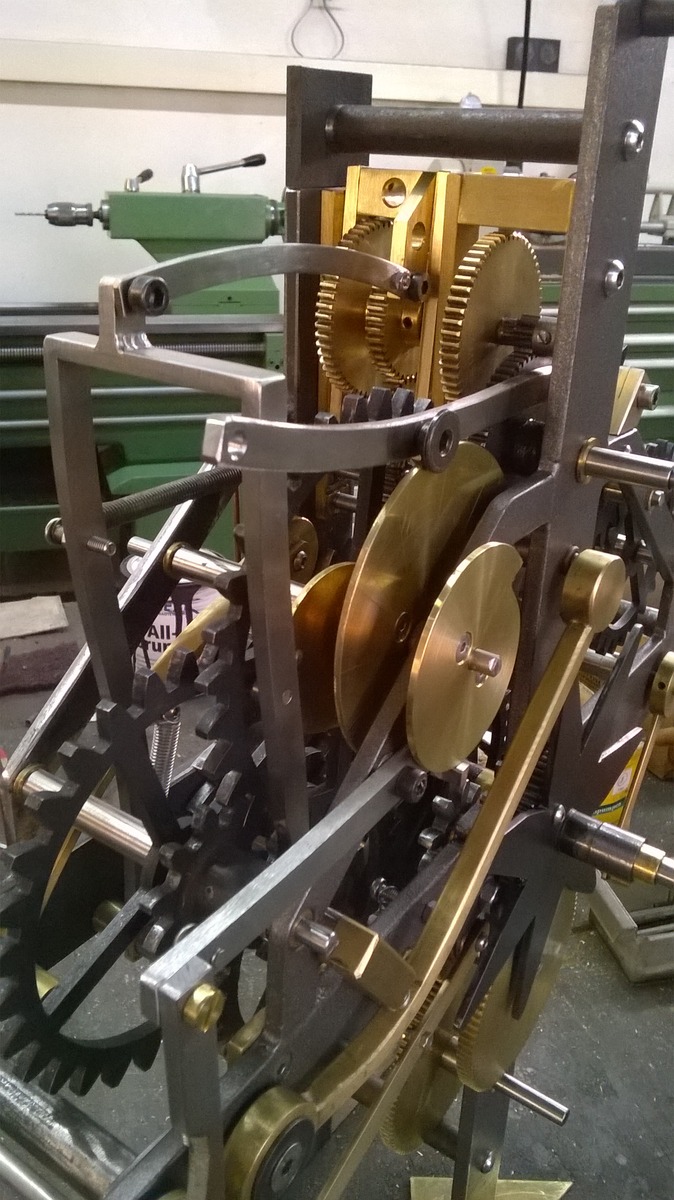
Kurbel? Nöö Mechanik kann ich. Hier das Hauptgetriebe meines ewigen Kalenders: Das Teil "weiß", wie lang jeder Monat ist, kann Schaltjahr, Wochentag, Monat, Mondphase, Sonnenzeit und die Zeiten für Sonnenaufgang und Untergang. Grüße Bernd
Michael B. schrieb: > Bernd F. schrieb: >> Eine Sammlervitrine mit wechselnder Ansicht soll das werden. > > 0,1mm Positioniergenauigkeit scheint mir dafür übertrieben. > > Bernd F. schrieb: >> Die Steuerung muss den Ablauf der 4 Verfahrwege > > Klingt zu aufwändig. > > Gehen wir mal davon aus, das nur ein Regalboden von oben, unter einer > Glasabdeckung sichtbar sein soll und 10 darunter warten, dann tut es > ein Paternoster sehr wohl: man muss nur jeden Regalboden in 2 Streifen > teilen, und die obersten beiden bilden nicht am höchsten Punkt, sondern > nebeneinander, die Präsentationsfläche. > > Steuerung superprimitiv: so lange fahren bis das gewünschte oben > sichtbar ist. > > Wenn man die Abstände klein haben will, kann sogar rein mechanisch die > lange Bewegung die oben den Regalboden horizontal verschiebt von der > Bewegung die ihn hoch und runter transportiert entkoppelt werden, ganz > ohne 4 Motoren, nur mit (Getriebe, alles was Bewegung umsetzt heißt in > der Mechanik Getriebe), hoch/runter wird also nur einen Teil > mitgeschleppt. So einfach möchte ich das nicht, Es sollen jeweils 2 Regalböden oben sichtbar sein. Das ganze ohne überstehende Teile, der Glasdeckel hat umlaufend einen 5-10 cm Glasrand. Dazu müssen die Böden hoch- quer- runter verschoben werden. Beim Querverschieben sollte eine stufenfreie Gleitbahn entstehen, das geht nur mit der hohen Positioniergenauigkeit. Die Vitrine soll höchsten Ansprüchen in Form und Funktion genügen. Das System habe ich über einige Jahre entwickelt, bisher halt nie gebaut. Grüße Bernd
Im Moment geht es mir halt um die richtige Auswahl der Komponenten, also Motoren und Positionssensoren. Das muss in die Konstruktion einfließen und soll "später" die Realisierung der Steuerung möglichst einfach gestalten. Es wäre irgendwo blöd, 4 Motoren zu kaufen, die ihren Zweck erfüllen, aber sich halt nicht sauber regeln lassen. Auch die Positionssensoren (die überfahrbar sein müssen), müssen ja irgendwo eingeplant werden. Die ganze Geschichte wird sehr eng bauen, allein die Spezialscharniere und Gasdruckfeder des Glasdeckels wollen auch noch Platz finden. Deswegen meine Frage zu Motoren und Sensoren. Natürlich wird so ein Prototyp, Einzelstück noch diverse Überraschungen bieten, aber sauber konstruiert sollte sich das im Rahmen halten. Grüße Bernd
Bernd F. schrieb: > Das System habe ich über einige Jahre entwickelt, Dann wäre eine Zeichnung nicht verkehrt, die müsstest du dann ja haben. Dass 2 Böden (nebeneinander) oben unter einer Glasabdeckung liegen, geht ja auch im Paternoster. Ein Ablauf (keine Steuerung) hinten den Stapel von 10 Böden nach unten, dann den obersten Boden von vorne nach hinten schieben (und gleichzeitig unten im Unsichtbaren von hinten nach vorne) und dann den vorderen Stapel nach oben, geht mit einfachsten mechanischen Getriebe.
Michael B. schrieb: > Bernd F. schrieb: >> Das System habe ich über einige Jahre entwickelt, > > Dann wäre eine Zeichnung nicht verkehrt, die müsstest du dann ja haben. > > Dass 2 Böden (nebeneinander) oben unter einer Glasabdeckung liegen, geht > ja auch im Paternoster. > > Ein Ablauf (keine Steuerung) hinten den Stapel von 10 Böden nach unten, > dann den obersten Boden von vorne nach hinten schieben (und gleichzeitig > unten im Unsichtbaren von hinten nach vorne) und dann den vorderen > Stapel nach oben, geht mit einfachsten mechanischen Getriebe. Hallo Michael, das funktioniert so einfach leider nicht. Diese mechanischen Lösungen habe ich bis zum Exess durchprobiert. Entweder wird das zu aufwändig, oder es ist nicht gewährleistet, das keine Erschütterungen auftreten. Das Ziel sollte sein, das eine randvolle Tasse auf dem Regal- boden keinen Tropfen verschüttet. Diese 4 Motoren Lösung ist am einfachsten zu realisieren. Grüße Bernd
Die Wünsche nach leise und platzsparend widersprechen sich etwas: Klein erreicht man bei Motoren, zumindest DC-Motoren, mit hoher Drehzahl, leise mit niedriger Drehzahl. Da wird ein Kompromiss erforderlich. Mir scheint ein Ansatz mit größeren und langsamer laufenden, aber vor allen Dingen eisenlosen DC-Motoren der richtige zu sein. Elektrisch oder mechanisch kommutiert ist vielleicht nicht so wichtig. Das kann bis zu unhörbar leise sein. So einen Motor kann man mit einfachen Mitteln (d. h., ohne Tacho) auch bei sehr niedriger Betriebsspannung bzw. Drehzahl mit konstanter, von der Last unabhängiger Drehzahl laufen lassen (da spiele ich gerade mit). Das könnte helfen, wenn kleine Motoren mit niedriger Drehzahl ein Ziel ist.
Hallo Uwe, da habe ich mich eventuell etwas fehlerhaft ausgedrückt. Die Mechanik wird (muss) platzsparend ausgeführt. Für die Motoren ist im Sockel Platz genug. 100 x 100 x 200 mm pro Motor. Grüße Bernd
Wenn Deine Mechanik keinen Schlupf und wenig Spiel hat, würde ich Servomotoren mit Absolutgebern einsetzen. Damit bekommst Du vernünftige Anfahr- und Bremsrampen hin und die Position hast Du auch. Damit kannst Du auch das Problem des "wie komme ich nach einer Störung wieder in eine Grundstellung"- Problem lösen Jörg
Hallo Bernd, dann bleibt meine Empfehlung von eisenlosen DC-Motoren. Vielleicht gibt es von den einschlägigen Herstellern (Faulhaber, Maxon ... noch wer?) sogar komplett passende Antriebe mit Steuereinheiten. Das wäre zwar nicht mein Weg, denn ich setze nur wenn es gar nicht anders geht fertige Komponenten ein und lasse lieber vieles auf meinem eigenen Mist wachsen. Servomotoren mit Absolutgebern, wie Jörg schreibt, sind ja schon solche kompletten Systeme. Ich denke, dass Absolutgeber über die gesamten Strecken nicht nötig sind. Sensoren, z. B. Gabellichtschranken, an den Enden, mindestens je eine(r) für "nahe dem Ende, jetzt verzögern" und einer für "Ende erreicht", könnten reichen. Ob mit oder mit welchen Gabellichtschranken die hohe Präzision erreicht wird, weiß ich jetzt nicht. Da gibt es bestimmt auch bessere Alternativen. Wenn ich mehr über die geplante Mechanik wüsste, könnte ich es besser beurteilen. Dass das System auch nach Stromausfall weiterhin korrekt arbeitet, lässt sich mit geeigneter Elektronik erreichen. Grüße Uwe (auch Rentner)
Ich glaube, dass es nicht genau wird, Positionen am Motor zu erfassen, da sind zuviel Meter Förderkette dazwischen. Die Positionen müssten an wirklich relevanten Punkten erfasst werden. Viele Grüße Bernd
Bernd F. schrieb: > Positionen am Motor zu erfassen Definitiv nicht, das hatte ich auch nicht gemeint. An den Enden der Verfahrwege, meinte ich. Vielleicht sogar direkt die Postion(en) der Regalböden, vielleicht kann man da was Pfiffiges machen. Aber ich weiß ja nicht, wie die Mechanik bei dir aussieht. Du schreibst von einer Förderkette. Ist die denn hinreichend spielfrei? Mit einer Kette klingt es ja doch schon wieder wie ein Paternoster. Aber 4 Motoren passen nicht dazu. Sind das 4 lineare Fördersysteme, vor, zurück (kaum Kraft), aufwärts, abwärts (viel Kraft)? Und die Regalböden werden den Fördersysteme jeweils übergeben?
Uwe B. schrieb: > Du schreibst von einer Förderkette. Ist die denn hinreichend spielfrei? > Mit einer Kette klingt es ja doch schon wieder wie ein Paternoster. Aber > 4 Motoren passen nicht dazu. Sind das 4 lineare Fördersysteme, vor, > zurück (kaum Kraft), aufwärts, abwärts (viel Kraft)? Und die Regalböden > werden den Fördersysteme jeweils übergeben? So kann man sich das vorstellen. Die Fördersysteme Hoch bzw. Runter sind jeweils endlose Förderketten (jeweils 4 Stück). Um eine ruckelfreie Querverschiebung (extra Antrieb mit deutlich weniger Kraft) zu ermöglichen, sollten die Auflagerschienen natürlich möglichst genau fluchten. Deswegen ist hier die hohe Positioniergenauigkeit nötig. Grüße Bernd
Bernd F. schrieb: > Um eine ruckelfreie Querverschiebung (extra Antrieb mit deutlich > weniger Kraft) zu ermöglichen, sollten die Auflagerschienen > natürlich möglichst genau fluchten. Deswegen ist hier die > hohe Positioniergenauigkeit nötig. Kannst du das mal irgendwie skizzieren, was das werden soll? Ich kann mir da gar nix unter vorstellen. Ich hab aber durchaus Maschinen, die ebenso Tabletts möglichst ruckelfrei aus einem Magazin ziehen, evtl. kann man da was abkucken. So oder so: wenn du immer aus der gleichen Richtung auf einen Sensor fährst der das Tablett erkennt hast du deutlich weniger als deine geforderten 3 zehntel. So kenn ich das wenigstens, die Achsen fahren immer hopp in den Sensor, wieder ein Stück zurück, dann ganz langsam wieder drauf und stop. Passt deutlich unter 0,1mm. Wobei da normalerweise Zahnriemen und keine Ketten benutzt werden. Ketten sind halt laut und schlackern...
4 Ketten für aufwärts (an jeder Ecke des Regalbodens eine), weitere 4 für abwärts? Jeweils 4 Ketten werden doch sicherlich mechanisch gekoppelt laufen. Wofür sind dann die 4 Motoren? Abwärts muss ja "nur" bremsen - was aber technisch keine kleinere Aufgabe ist. Ganz offensichtlich sind die Anforderungen bzgl. Sanft(an)lauf in diesen (vertikalen), Richtungen deutlich geringer, als die in horizontaler Richtung - aber deswegen noch lange nicht vernachlässigbar. Nebenbei: Die Idee, entweder die Regalböden auf der Unterseite oder, noch besser, die Schienen, auf die sie (vermutlich) geschoben werden, ganz leicht anzuschrägen, damit sie nicht über eine Stufe beim Verschieben fallen sondern langsam gleiten, hast du bestimmt auch schon nachgedacht? Könnte man ggf. an oder unter den Regalböden etwas anbringen, um deren exakte Position zu bestimmen? Ob da etwas und was da ggf. helfen könnte, weiß ich noch nicht.
Michael B. schrieb: > unter einer Glasabdeckung liegen, geht > ja auch im Paternoster. So ähnlich hätte ich das mir auch vorgestellt. Seitlich versteckte Fahrradketten (od. Stahlseile) und mehrere Etagen mit den vollen Kaffeetassen. Sie dürfen allerdings nicht schaukeln! Die Kunst wäre: im versteckten Bereich die Tassen von einem Tablett auf ein anderes auszutauschen. Die Tabletts könnten ja ähnlich wie Lochband digital codiert Werte haben, die ausgewertet werden, um die Tabletts am rechten Fleck anzuhalten (oder sogar QR-Code der eine Beschreibung der Tasse liefert). Eigentlich reicht dazu ein Antriebsmotor, der über eine Welle alle Etagen vertikal bewegt? Für den Tablettaustausch wäre weiter Mechanik nötig.
Bernd F. schrieb: > So kann man sich das vorstellen. Die Fördersysteme Hoch bzw. Runter > sind jeweils endlose Förderketten (jeweils 4 Stück). > > Um eine ruckelfreie Querverschiebung (extra Antrieb mit deutlich > weniger Kraft) zu ermöglichen, sollten die Auflagerschienen > natürlich möglichst genau fluchten. Deswegen ist hier die > hohe Positioniergenauigkeit nötig. Das hört sich eher so an als ob zwei total unterschiedliche System hier sinnvoll wären. Für den "Padernoster" dürfte ein ganz normaler DC-Getriebemotor mit einer Steuerung, die eine schönen sanftes Anlaufen/Stoppen ermöglicht, ausreichen. Irgendwo einen Microschalter versteckt der zeitig detektiert das der Boden seine Position erreicht hat und das Bremsen einleitet. Ggf noch einen zweiten für die exakte Endposition. Mit z.B. vier von denen in der "Vorankündigung" und entsprechenden Aussparungen im "Boden" könnte man sogar 15 verschiedenen Böden unterschieden. Alles andere hört sich wirklich irgendwie nach Servomotoren mit Absolutwerterfassung an. Aber nicht das billige Modellbauzeugs, sondern was Industrielles, was man entsprechend gut Parametrieren kann. Außer du hast auch hier die Möglichkeit irgendwas mit Endschaltern zu machen? Schrittmotor heißt halt meistens Dauerstrom und wenn der mal weg ist die Suche wo das ganz jetzt hingewandert ist wenn das Haltemoment nicht (mehr) ausreicht... Generell dürfte bei möglichst "Sanftanlauf" das Thema Spiel und vor allem der Losbrechmoment sein. Eventuell musst du das ganze kräftig "Überdimensionieren" um bereits bei ganz geringen Bewegungen diesen überwinden zu können. Nicht das sich erst etwas Kraft "aufbaut" und dann ein Ruck entsteht. Jens M. schrieb: > Kannst du das mal irgendwie skizzieren, was das werden soll? Ich schließe mich hier mal an...
Ich würde dir zu einem DC Motor mit Schneckenhetriebe raten. Ein Motor pro Regalbrett, der über ein festes getriebe alle Ketten des Paternosterlifts antreibt. Bei mehreren Motoren müsstest Du in der Ansteuerung darauf achten das das Brett grade bleibt. Ein DC Motor ist günstig, einfach und unkompliziert in der Ansteuerung. Statt einzelner Mikroschalter auf den Ebenen könntest Du über eine Lochscheibe mit Lichtschranke direkt an der Achse die Position messen, dann reicht ein Sensor, statt zahlreicher Mikroschalter und ist mechanisch robuster und unempfindlich.
Angehängte Dateien:
-

IMG_20240402_0001.jpg
230 KB
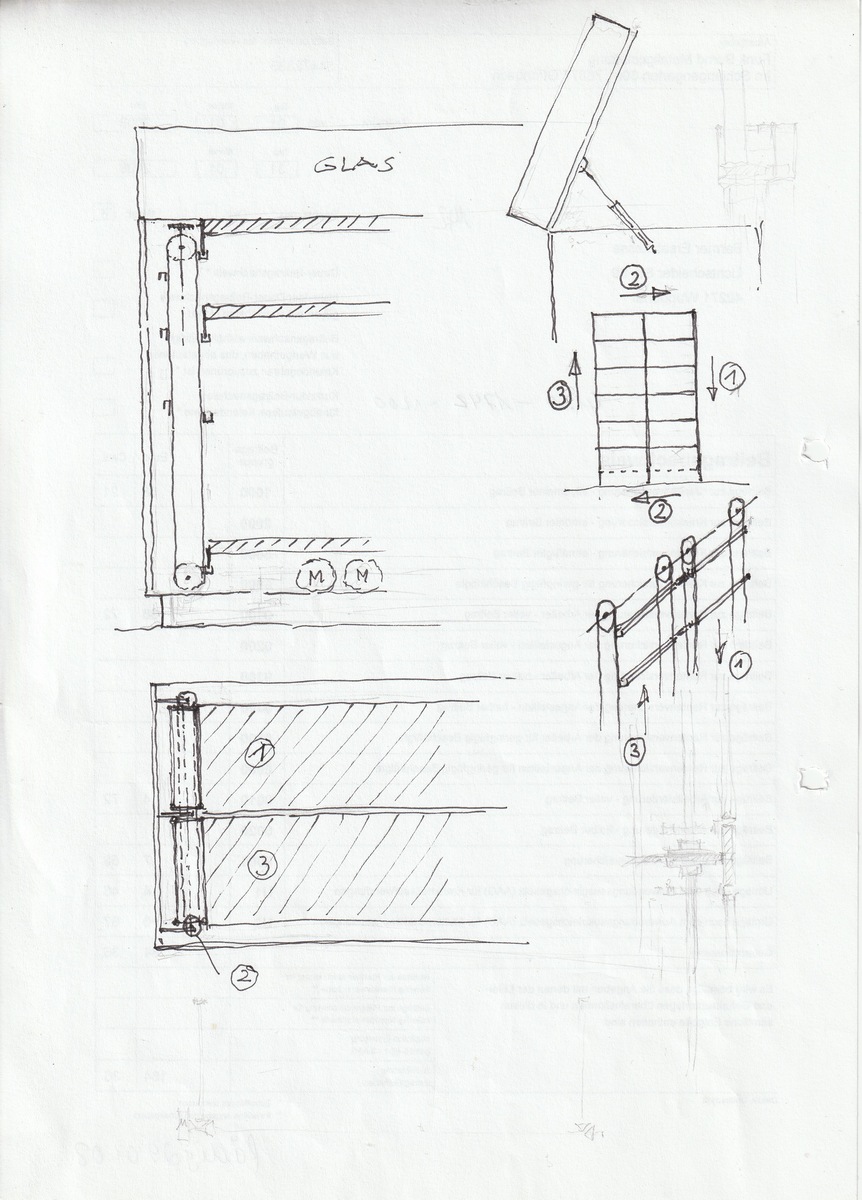
Irgend W. schrieb: > Jens M. schrieb: >> Kannst du das mal irgendwie skizzieren, was das werden soll? > Ich schließe mich hier mal an... Ja, ich kann das mal skizzieren. Eventuell wird hier das Problem der Positioniergenauigkeit deutlicher. Die Auflagerschienen von Antrieb 1 und 3 müssen möglichst genau auf gleicher Höhe liegen, damit Antrieb 2 seine Aufgabe erfüllen kann.
Bernd F. schrieb: > Von solchen Steuerungen habe ich Null Ahnung. > Aber erst mal kümmere ich mich um die aufwendige Mechanik. > Welche Motoren und Positionierschalter soll ich einplanen? Das ganze schreit nach einer kleinen SPS mit passendes Display. So Siemens 1200 z.B. Da gibts bei reichelt Starter Kits, inkl. Display. Die Kosten dafür sollten bei dieser Mechanik + evt. Sensorik keine Rolle mehr spielen.
Ok, ich erkenne: Die Antriebe 2 müssen sehr ruckelfrei laufen, bei den Antrieben 1 und 3 ist das deutlich weniger notwendig (aber auch nicht beliebig vernachlässigbar). Wie ich schon fragte, hier etwas umformuliert: Die Idee, entweder die Auflagerschienen oder, noch besser, die Schienen an den Regalböden, ganz leicht anzuschrägen, damit sie nicht über eine kleine Stufe beim Verschieben fallen (oder dagegen stoßen), sondern langsam gleiten, hast du bestimmt auch schon nachgedacht? Ansonsten: Leise DC-Motoren mit selbstblockierendem Schneckengetriebe, Motoren eher größer als technisch erforderlich, damit sie langsam und leise laufen können. 50 kg Gewicht mit 100 mm/s. Schrittmotoren dürften deutlich hörbar sein. Vorschläge: Die Positionserkennung grob evtl. mit einen 10-Gang Wendelpoti (hab' ich lange nicht mehr gesehen), dazu (Gabel-)Lichtschranken für die genauere Erkennung der Position. Nicht so genau, aber Abschrägungen bügeln das aus. Es ist ja nicht garantiert, dass, wenn die oberen Schienen fluchten, es die unteren auch tun?
:
Bearbeitet durch User
Bernd F. schrieb: > Ja, ich kann das mal skizzieren. Sehe ich richtig: - Ein Paternoster "3", der mit zwei Ketten die rechte und die linke Schiene "aufwärts" fährt. - Ein zweiter Paternoster "1" parallel daneben, der nur "abwärts" fährt. - 2 Schiebemechaniken, die oben "3->1" schieben und unten "3<-1" - Die jeweils beiden oberen Böden sind durch den Glasdeckel sichtbar. - Zum Wechsel der Ansicht im Glasdeckel wird ein Boden abgesenkt, der andere rübergeschoben, der jetzt leere Platz angehoben, und das ganze zweimal um beide Teilböden zu tauschen, unten im Schrank unsichtbar das ganze synchron mit Reserveböden ebenfalls? Bernd F. schrieb: > Eventuell wird hier das Problem der Positioniergenauigkeit > deutlicher. Da bin ich aber voll dabei das man das mit 2 Lichtschranken pro Antrieb und Stelle lösen kann, also "3" hat oben und unten eine, "1" ebenso. Wenn die Maschine zwischen "oben umschieben" und "unten umschieben" neu positionieren muss sollte das kein Problem sein, das würde ich auf jeden Fall vorsehen falls die Ketten Spiel haben. Evtl. noch jeweils eine zusätzliche Lichtschranke für die "Präsentierposition". Ersetze "Lichtschranke" mit "induktivem Sensor" oder "Mikroschalter", wenn du magst. Ich würde es mit Gabellichtschranken und einstellbaren Läppchen machen, das bekommt man deutlich unter 1/10mm genau eingestellt und es verschleißt nicht. Ist Fummelei bis es passt und dann hat man 10 Jahre Ruhe damit. Erledigt zudem das Problem der Stromausfallsicherheit: Wenn die Lichtschranke bedeckt ist, ist ein Boden da (oben oder unten), wenn nicht kann man ja auf Suche gehen und einfach Heben/Senken, so lange kein Signal kommt sind die Böden ja nicht eingesetzt und das Ding kann drehen. Als Notstop evtl. noch ein Mikroschalter in den Kurven der kommt wenn ein Boden gecrasht wird, wenn man dem nicht traut. Zur Identifikation ebenfalls eine passende Anzahl Winkel an den Böden und z.B. 4 Gabellichtschranken im Turm, dann kann man 16 Böden unterscheiden. Oder nur einen, als Anfang/Nullposition. Die Antriebe würde ich mit Schnecken machen, dazu pro Weg ebenfalls 4 Sensoren, pro Ende ein Brems- und ein Stopkontakt.
Uwe B. schrieb: > Die Positionserkennung grob evtl. mit einen 10-Gang > Wendelpoti (hab' ich lange nicht mehr gesehen), dazu > (Gabel-)Lichtschranken für die genauere Erkennung der Position. Das muss so langsam fahren das es kein Problem sein sollte einfach direkt in die Sensoren zu fahren. Aber man kann natürlich auch z.B. Löcher in der Kette oder mit einem Hilfsrad Zähne zählen und dann "langsam los, 18 Löcher Fullspeed, dann langsam bis Sensor". Oder eben einfach reinfahren und evtl. korrigieren, z.B. Sensor kommt = Bremsen, Sensor geht = Stopposition. Kann man mit einer verstellbaren Blende und einer Gabellichtschranke lösen.
Bernd F. schrieb: > Eventuell wird hier das Problem der Positioniergenauigkeit > deutlicher. Musst du alles auf den letzten mm Höhe ausreizen? Der Kasten braucht eine Steuerung und dann macht ein etwas aufwändigeres Programm auch keinen Aufwand mehr. Wenn eine Kiste unten ist, müssen die Kisten ja nicht darauf stehen, sondern können ja weiter am Kettenförderer hängen. Ebenso ganz oben: Box ausstellen: Der Kettenförderer bringt die Box ganz nach oben. Der Verschiebeschlitten fährt darunter, der Kettenförderer dreht rückwärts und setzt die Kiste darauf sanft ab. Der Verschiebeschlitten transportiert die Box zum zweiten Kettenförderer. Dieser dreht rückwärts nach oben und nimmt die Box auf. Der Verschiebschlitten fährt wieder zurück. Ich würde vier Antriebe wählen. 2x Schrittmotor für die Verschiebeschlitten 2x Schrittmotor oder Servor oder großer Schrittmotor für die Vertikalantriebe. sg
:
Bearbeitet durch User
Jens M. schrieb: > Das muss so langsam fahren das es kein Problem sein sollte einfach > direkt in die Sensoren zu fahren. Es wird ja aus 100 mm/s ein längerer Bremsweg gebraucht. Die Sollposition dann iterativ anzufahren, kommt bestimmt nicht gut. Eine längere Blende, beim Eintauchen verzögern bis ganz langsam, am Ende dann noch ein Rest abrupt Stopp - vielleicht. Das Wendelpoti hätte den Vorteil, dass man auch nach dem Einschalten die Istpositionen kennt - dachte ich. Ist natürlich Unsinn, denn das Wendelpoti hat Anschläge - darf es aber nicht. Da habe ich eine andere Idee: Ich habe Potis, die ich X/Y-Potis nenne. Die kann man endlos drehen und sie geben 2 90° versetzte (Dreiecks-)Signale aus. Wenn dann eine Umdrehung zu genau n = 1, 2, ... Regalbodenabständen passt, könnte das eine gute Lösung für die ungefähre Position eines Bodens sein. Mit einem Getriebe auch für die ungefähre Position der gesamten Kette. Clemens S. schrieb: > Schrittmotor Niemals.
Cyblord -. schrieb: > Das ganze schreit nach einer kleinen SPS mit passendes Display Oje. Ein Drehschalter mit x Positionrn und das Ding läuft so lange bis ein zweiter Drehschalter in der Kiste dieselbe Position bekommt. Auch sehr ich nur 2 Motoren, hoch/runter und hinten/vorne die abwechselnd laufen (was man auch mit einem dauerlaufenden Motor und passendem Getriebetrieb erreichen könnte). Statt Ketten dürften Zahnriemen ratterfreier laufen. Und zum sanften Anfahren/Bremsen kann man auch einen längeren Hebelarm (halb so lang wie der Vorschubweg) am Motor mit einer Rolle am Ende gegen die Bretter drücken lassen, am Anfang trifft die Rolle ganz flach, in der Mitte volles Tempo, zum Schluss verlässt die Rolle wieder ganz flach die nennen wir es Vorschubleiste, gibt eine schöne Cosinusform bei konstant laufendem Motor der gar nicht exakt bremsen muss, dafür der Hebelarm eine exakte Länge haben muss.
Uwe B. schrieb: > Da habe ich eine andere Idee: Ich habe Potis, die ich X/Y-Potis nenne. > Die kann man endlos drehen und sie geben 2 90° versetzte > (Dreiecks-)Signale aus. Wenn dann eine Umdrehung zu genau n = 1, 2, ... > Regalbodenabständen passt, könnte das eine gute Lösung für die ungefähre > Position eines Bodens sein. Mit einem Getriebe auch für die ungefähre > Position der gesamten Kette. Gratuliere du hast soeben den Multi-Turn Drehgeber erfunden. Gibt's für 20€ fertig beim Chinesen. Die verwenden aber meist drei Zahnräder mit Primzahlen als Zähnezahl und magnetische Drehgeber. Aber es gibt nichts das man selbst teurer und schlechter mit einem 3D Drucker selbst herstellen kann. Sg
Harald K. schrieb: > Wenn das funktioniert, kann man die Kurbel durch einen Motor ersetzen ... und zur Not dann im Handbetrieb betrieben werden. Würde ich auch so machen. Das der Bernd so was kann, wissen wir. Aber auch für ihn wird es eine Herausforderung, wenn er so etwas oder ähnliches nicht schon mehrfach gemacht hat. Wie oft hat man alles genau geplant und aufgebaut ist da eine Ecke im Weg.
Clemens S. schrieb: > Gratuliere du hast soeben den Multi-Turn Drehgeber erfunden. Hä? Ich habe lediglich den Einsatz eines X/Y-Potis als mögliche Lösung erwogen - nicht erfunden. Und Multi-Turn impliziert nicht Infini-Turn (Drehgeber schon eher). Zeig mir mal einen Link, vielleicht ist das, was du meinst, ja eine besser geeignete Lösung, weil professioneller und vollständiger. Die wäre willkommen. Ich habe nur Multi-Turn-Potentiometer gefunden.
Uwe B. schrieb: > Zeig mir mal einen Link, vielleicht ist das, was du meinst, ja eine > besser geeignete Lösung, weil professioneller und vollständiger. Die > wäre willkommen. Ich habe nur Multi-Turn-Potentiometer gefunden. https://www.aliexpress.com/item/1005001685668320.html hier eine Skizze mit Zahnrädern am Umfang der Achse. https://cs.emis.de/LNI/Proceedings/Proceedings36/GI-Proceedings.36-14.pdf sg
Hmmm - ja, professioneller, langlebiger, robuster und präziser ist der "Multi-drehen Absolute Encoder 485 Winkel Einzel-drehen Absolute Digitale Drehgeber" zweifellos. Meine Nörgelei: Es gibt keine Dokumentation. (Es gibt sicherlich andere, fast identische Drehgeber, die anständig dokumentiert sind.) Anscheinend gibt er über die 360° numerische Werte im Bereich 0 bis 2^16-1 aus (RS485, Modbus RTU). Auf diese Auflösung und Präzision komme ich mit meinem X/Y-Poti nicht. Aber würde sie helfen? Beide Lösungen würden ein Getriebe brauchen, damit mit genau einer 360°-Umdrehung ein Durchlauf aller x Regalböden bzw. ein Kettenumlauf abgebildet wird. Die Auflösung ist dabei viel kleiner als die gewünschten 0,1 mm, die sich bei einer 6,5536 Meter langen Kette ergeben würde. Das kann mein X/Y-Poti nicht. Aber kann man damit die exakte Halteposition finden? Zunächst wäre eine Kalibrierung nötig, aber wie ist es mit der Wiederholgenauigkeit? Da wäre es schön, wenn eine Zahnradumdrehung einem Regalbodenabstand entspräche. Kein Getriebe am Encoder, aber irgendwo müssten Umdrehungen gezählt und gespeichert werden. Also würde bei beiden da noch eine weitere Einrichtung dazu gehören. Andererseits - die Wiederholgenauigkeit muss zwangsläufig stimmen, denn es werden 4 Ketten von einem einzigen Motor gemeinsam angetrieben. Und zwei weit voneinander entfernte(!) davon sollen exakt an der richtigen Position stehen, sie nicht individuell justierbar. Man muss sich also darauf verlassen können. Dann kann man den Drehgeber auch an einer Antriebsachse oder an der Motorwelle anbringen. Ok, ich plädiere für so einen Drehgeber mit spielfreiem Getriebe für 360° pro Kettenumlauf.
Hallo, misch mich mal hier ein. Zu den Motoren: Ich habe die letzen 20 Jahre selbst Hard- und Software zum Ansteuern von Motoren entwickelt und erfolgreich vertrieben. Für derart Präzises eignen sich DC-Motoren ganz hervorragend. Üblicherweise werden dazu Faulhaber- oder Maxon-Motoren verwendet. Beide Marken und deren Produkte sind gleichwertig - auch preislich. Ich habe Faulhaber vorgezogen weils ein deutsche Hersteller ist. Maxon kommt aus der Schweiz. Ein bürstenbehafteter DC-Motor kommt schnell mal auf €200,00 wenn er etwas leistungsstärker sein muss. I.A. werden mit den Motoren inkrementale Enkoder verbaut, meist 'HP'. Diese optischen Enkoder sind bis 500 Linien üblich (das ergibt bei Betrieb mit Quadratur-Enkoder) 2000 Positionen pro Motorumdrehungen. Fauhaber selbst verbaut auch manetisch Enkoder (die sin kleiner) ebenfalls mit 500 'Linien'. Die Ansteuerung erfolgt, logischerweise, über einen Mikrocontroller der sowieso einen Quadratur-Enkoder mitbringt. So werden die A- und B-Kanäle einfach auf die entsprechenden Zählereingänge gegeben. Die Zählung (Dekodierung) erfolgt in Echtzeit ohne Zutun der CPU. Da braucht der PID-Rgler nur noch priodisch auf den Zählerstand zu zugreifen. Fertig ist eine absolut präzise Positionierung oder Drehzahlregelung. Im Positionierbetrieb werden 2 Rampen automatisch generiert, eine Beschleunigungs- und eine Verzögerungsrampe 8meist beide gleich lang bzw. steil). Motorbeschleunigung und Verfahrgeschwindigkeit werden voreingestellt. Ein Befehl 'Fahre auf Position 1234' nimmt die Position, generiert die Rampen und läßt den Motor drehen. Das geschieht absolut präzise und ruckfrei (sofern es kein großes Losbrechmoment gibt). PID-Parameter natürlich gut eingestellt. Das kann aber m.E. durch probieren gut gelingen. Das größte Problem dabei ist, daß nach dem Einschalten der Spannungsversorgung die Elektronik nicht weiß wo die Motoren stehen. Daher wird zwingend eine Referenzfahrt nötig. Üblicherweise ein Fahren gegen irgendeinen Endschalter o.Ä. (Baumer hat einen Schalter der einen Hub von 1Mikrometer benötigt um auszulösen. Hat mal um €50,00 gekostet). Das ist bei dieser 'Paternoster-Mechanik' praktisch nicht möglich. Daher fallen die üblichen Motorsteuerungen einfach unter den Tisch (es sei denn, man lässt sich was sehr inteligentes einfallen, das überfordert mich aber). Wenn die 'billigen' inkementellen Dekoder ausscheiden, scheiden auch die 'billigen' Motorsteuerungen aus. Also Absolutwertgeber. Die absolute Spitze (auch hinsichtlich der Preise) ist Heidenhain (gibt auch andere - kenn' ich aber nicht). Meines Wissens bieten die auch Motorsteuerungen mit Absoluwert-Eingang an (viell. auch Faulhaber. K.A. bin schon länger raus aus dem Geschäft). Kann mir vorstellen, daß man da schnell mal auf €1000,00 kommt, zzgl. Motor. Aber wenn das jmd besser weiß, nehme ich das sofort zurück und behaupte das Gegenteil^^. Ich hoffe geholfen zu haben. @Bernd: Hut ab, tolle Mechanik f. deine Uhr, da muß man schon was drauf haben.
Uwe B. schrieb: > Ok, ich plädiere für so einen Drehgeber mit spielfreiem Getriebe für > 360° pro Kettenumlauf. Warum?!?!?! Uwe B. schrieb: > Und Multi-Turn impliziert nicht Infini-Turn nein natürlich nach n Umdrehungen springt der Geber über. https://www.tr-electronic.de/produkte/drehgeber/absolutdrehgeber/funktionsbeschreibung Uwe B. schrieb: > Ok, ich plädiere für so einen Drehgeber mit spielfreiem Getriebe für > 360° pro Kettenumlauf. Die Lösung vereint die Nachteile einer Bastellösung mit den Kosten einer Kauflösung. Aber zurück zum Projekt: Bernd F. schrieb: > Es soll möglichst leise funktionieren. wie leise? in der Nacht im Schlafzimmer unhörbar? 2-10dB Stilles Arbeitszimmer 20-30dB Büro 40-50dB Verkaufsraum auf Messe 40-60db usw Darf "geschummelt" werden? - wenn eine Nummer gewählt wird schneller und lauter fahren, wenn nur zyklisch gewechselt wird die Geschwindigkeit verringern Bernd F. schrieb: > schön wäre noch, wenn man die 10- 20 Regalböden nummerieren > könnte, und nach Eingabe auf einem Tastenfeld der passende > Boden in Endposition fährt Willst du nur "Boden 12" anfahren können, oder sollen die Böden auch nach dem herausnehmen und umsortieren richtig angefahren werden können? ist herausnehmen wichtig? Bernd F. schrieb: > Da komme ich auf folgende Anforderungen für einen Motor: > Drehmoment: 10-15 Nm (Lagerreibungen?). > Drehzahl: 10-12 U/min > Leistung ca. 0,02 kW stimmt. aber ein Schneckengetriebe das Selbsthemmend ist, hat normalerweise nicht mehr als 50% Wirkungsgrad. Ich denke dass es Sinn macht einen Schrittmotor für den Vorschub zu verwenden und einen Servomotor für die Vertikalverstellung. Wir positionieren mit Schrittmotoren in einer -6db Akustikkammer. Das ist problemlos möglich, bedeutet aber etwas Aufwand. sg
Matthias G. schrieb: > Hallo, misch mich mal hier ein. Hallo Matthias, ich stimme dir zu 100% zu. Ich kenne auch die Faulhaber-Motoren mit Encoder und habe sogar einige wenige hier. Das Problem der Referenz-Fahrt: Die darf offensichtlich nicht stattfinden, denn man müsste maximal einmal fast komplett herum fahren, um den Referenzpunkt zu finden. Aber schon nach kurzer Fahrt fällt der erste Regalboden aus der Kette... Ein entsprechender Absolutwertgeber wäre erforderlich. Oder, etwas riskant, ein nichtflüchtiger Speicher, der jederzeit die Momentan-Position kennt. Wehe, wenn da mal etwas verloren geht. Ich glaube dir, wenn du schreibst, dass fertige Steuerungen weder die eine noch die andere Methode kennen oder können. Dann kommt also nur eine Individuallösung in Frage, und es werden die Entwickler (statt der Baukästen-Spezialisten;-) gefragt. Oder die "Bastler", wie man das auch dysphemisch formulieren könnte.
:
Bearbeitet durch User
Ja. Speziallösung ist die einzige (bezahlbare) Lösung, wenn 'ehrenamtlich' gearbeitet wird. Die Motoren und die Derehgeber kosten schon genug. Der Einsatz eines Schneckengetriebes ist sicher nötig, bringt aber jede Menge Spiel mit. Zumindest ist mir nicht bekannt, wer vorgespannte Schneckengetriebe herstellt. Aber was Bernd mit seiner Uhr gemacht hat! Da dürfte ein vorgespanntes Schneckengetriebe auch kein Prob darstellen. Position im EEPROM? Muß ich drüber nachdenken, ist nicht so einfach..
:
Bearbeitet durch User
Matthias G. schrieb: > Die Ansteuerung erfolgt, logischerweise, über einen Mikrocontroller Bernd wird keinen Mikrocontroller programmieren. Der macht nicht das was du in Jahren als Job gemacht hast für den du ordentlich bezahlt wurdest mal eben am Rentnerabend als Hobby nebenbei. Es ist auch völlig unnötig. Bei geeigneter Mechanik muss nur eine Scheibe eine halbe Umdrehung weit laufen, und dazu hat man einen Motor mit Schneckenuntersetzung. Wenn der abgeschaltet wird, bleibt der ausreichend schnell stehen, die Scheibe dreht kaum weiter. Die Scheibe schiebt, zu Beginn vorsichtig, dann schnell, dann wieder langsam, wegen Cosinus einerseits die vertikalen Führungen um 1 Position hoch bzw. runter und eine andere Scheibe am zweiten Motor das obere Regalbrett um eine Breite nach hinten bzw. simultan das untere nach vorn. Die ganze Steuerung von 2 Motoren kann primitiv mit Relais und Schaltern erfolgen. Kein Mensch braucht dazu eine SPS oder einen uC mit Incrementalencoder und PID Regelalgorithmus. Es würde bei Kopplung sogar ein Motor reichen, eine halbe Scheibenumdrehung wird das Brett nach hinten verschoben (das untere mach vorne), die andere halbe Umdrehung der Paternoster der Führungen nach oben (den anderen Stapel nach unten), nach genug Umdrehungen stoppt er in einer Position in der die Bewegung nur noch tangential weitergegeben wird, sich also trotz grossem Drehwinkel kaum noch verschiebt. Ja, wer nur einen Hammer hat will alles nageln.
Uwe B. schrieb: > Das Problem der Referenz-Fahrt: Die darf offensichtlich nicht > stattfinden, denn man müsste maximal einmal fast komplett herum fahren, > um den Referenzpunkt zu finden. Ähm, nein?!?! Mit Lichtschranken für die Schienen und Pusher (Position) und Tabletts (Vorhandensein, ID) reichen minimale Bewegungen aus um die Maschine zu initialisieren. (ID kann auch auf den Schienen liegen, dann ist der Ablauf einfacher, weil die Reihenfolge der Tabletts fest ist. ID auf dem Tablett könnte beim Befüllen der Vitrine durcheinander kommen...) Der jeweilige Ablauf ergibt sich aus dem Zustand der Sensoren, und die sind statisch ablesbar. Jede Achse ist dann sicher referenzierbar, ohne Crash. Das macht jede Maschine so, und: Absolut würde bei Ketten eh nicht gehen, wegen der Dehnung.
@Michael:\n Mein Beitrag war nicht dazu gedacht, Bernd zum Programmieren zu bringen. Es war viel von den Motoren die Rede und ich wollte Leuten, die nicht so tief in Motorregelungen stecken aufzeigen, was im Inneren einer Motorsteuerung (-regelung) passiert und wie es passiert und das das mit den 'einfachen' Motorsteuerungen kaum realisierbar ist. Mehr wollte ich nicht. Auch nichts raushängen lassen, nur mein Wissen teilen. Nett, hilfsbereit und ohne zu werten. Danke fürs Lesen.
Jens M. schrieb: >> Das Problem der Referenz-Fahrt: Die darf offensichtlich nicht >> stattfinden, denn man müsste maximal einmal fast komplett herum fahren, >> um den Referenzpunkt zu finden. > > Ähm, nein?!?! > Mit Lichtschranken für die Schienen und Pusher (Position) und Tabletts > (Vorhandensein, ID) reichen minimale Bewegungen aus um die Maschine zu > initialisieren. Zweifellos, so ginge es auch. Es ist dann halt keine Fahrt zu dem einzigen Referenzpunkt, sondern nur zum nächsten Referenzpunkt. Zu bedenken ist, dass man nur in die Richtung fahren darf, wo zurzeit kein Regalboden ist. In jedem Lift muss das mindestens ein Platz sein, und der muss oben oder unten sein. Und wenn der Stromausfall nicht gerade beim horizontalen Verschieben statt fand. Diese Informationen berücksichtigst du ja auch. Die ganze Steuerung rein mechanisch mit Steuerscheiben zu machen, wäre wahrscheinlich auch möglich. Sehr sanftes Beschleunigen und Bremsen der Ketten wäre auch mit ungeregelten Motoren konstruktiv einfach. Theoretisch nicht so kompliziert, aber praktisch - weiß ich nicht. Matthias: Nicht EEPROM. Die aktuelle Technologie wäre NVRAM. Egal.
Ich habe mit gerade mal ein paar Datenblätter von induktiven Sensoren angeschaut. Sensoren mit geringen Schaltabstand (1-2mm) seitlich angefahren, sollten hinreichend genau sein. Dieser seitliche Abstand der Transportschienen ist auch für jede Schiene präzise herstellbar. Zusätzlich hilft eine mechanische Lösung gegen eventuellen Versatz der Schienen: Die Gleiter haben eine Länge von jeweils 60 mm (einfach mal angenommen), drehbar befestigt und in der Mitte etwas ausgefräst würde bei einer Stufe von 1mm der Gleiter diesen Versatz auf 50mm Weg verteilen. Zum Einschalten nach Störung: Ohne Störung laufen die Motore in der Folge 1-2-3. Nach Störung sollte geprüft werden, welcher Endschalter noch nicht erreicht ist und der ensprechende Motor zuerst angesteuert werden. Mit 3 bistabilen Relays könnte man das bestimmt auch lösen. Grüße Bernd
Ich sehe die fast vollständige mechanische Lösung vor mir. Nur Relais-Logik, vermutlich 4 bistabile Relais. Kein Problem bei Stromausfall ergibt sich ganz nebenbei. 4 Motoren, die nicht(!) in der Geschwindigkeit geregelt werden, schieben oder ziehen über eine Art Excenter-Steuerscheiben die Regalböden einen Platz horizontal oder vertikal weiter. Das ergibt sehr sanfte Beschleunigungen. Hat ein Excenter eine Umdrehung vollbracht, bleibt der Motor stehen und der nächste Motor wird gestartet. Nur bei der letzten der 4 Bewegungen nicht. Wenn das auch in beiden Richtungen funktionieren soll, wird die Relais-Logik etwas aufwändiger. Und es sind keine präzisen Endschalter o. Ä. erforderlich, lediglich einfache an den Excentern. Und ausreichend Präzision. Wie gesagt, es wird ausreichend mechanische Präzision erforderlich sein, um die Endpositionen hinreichend genau zu erreichen. Hinreichend genau kann sein: Wenn man die - ich nennen sie mal Gleitschienen - an den Enden abschrägt, so, wie bei einem Schlitten für die Schussfahrt im Schnee, der bei Vorwärtsfahrt auch nicht gegen jede kleine Kante knallt, würde auch ein mäßiger Versatz harmlos sein. (Alternativ die U-Profile, die an den Ketten befestigt sind, "nach unten" abschrägen.) Das schrieb ich schon, aber, Bernd, wie du das mit den drehbaren und in der Mitte etwas ausgefrästen Gleitern meinst, habe ich nicht verstanden. Aber das Ziel ist offensichtlich dasselbe.
Bistabile Relais und Endschalter verträgt sich glaub ich nicht. Wenn der Exzenter auf den Schalter drückt und das Relais abwirft, bleibt der Motor stehen und die Spule dauerbestromt. Das mögen die nicht so. Aber da könnte ein kleines Zeitmodul (Wischrelais) helfen, das den Impuls verkürzt.
Bernd F. schrieb: > Ja, ich kann das mal skizzieren. Sehr interessante Idee! Das hoch/runter ist hier eventuell wirklich der einfachere Teil. Unten könnte ich mir vorstellen soweit runterfahren, bis die Vorderkante auf einer ganze Reihe von Rollen aufliegt und zwei davon angetrieben sind. Damit dann soweit fahren(verschieben) bis entweder ein Endschalter an der Seite erkannt wird oder ggf. auch einfach an einen mechanischen Anschlag laufen lassen. Auf so einer Rollenbahn sollte das auch recht sanft laufen weil ja keine "Lücken" oder so überbrückt werden müssen. Aber oben? Wie stabilisierst du generell die Bretter das die Vorderkante auf gleicher Höhe bleibt und das auch bei unterschiedlicher Belastung der Bretter? Wie soll das ganze überhaupt waagrecht gehalten werden, wenn es nur an der Hinterkante an einer "nachgiebigen" Kette hängt. Und wie soll das oben stabilisiert werden um den Übergang von der einen "Halteschiene" auf die andere zu gewährleisten. Da dürfte ja ein kurzes Stück "Luft" zu überbrücken sein?
Die mechanischen Probleme sind gelöst, bzw. werden beim Bau behoben. Leider kostet die Technik richtig Geld. Transportketten, Kettenräder, Lager, Wellen, Laserbleche, Antriebsmotore usw. werden ca. 1500,-bis 2000,- kosten. Glashaube und Holzumhausung nochmal 1500,-. Das sind reine Materialkosten. Die nötige Elektrik, Elektronik? Also ein durchaus aufwändiges Bastelprojekt, das gefälligst auch fertig werden sollte. Ich skizziere gerade mal ein Ablaufdiagramm als reine Relais/ Schützschaltung. Scheint machbar zu sein, auch mit Sicherheit bei Stromausfall oder Notstopp. Grüße Bernd
:
Bearbeitet durch User
Angehängte Dateien:
-

Regal.png
43 KB
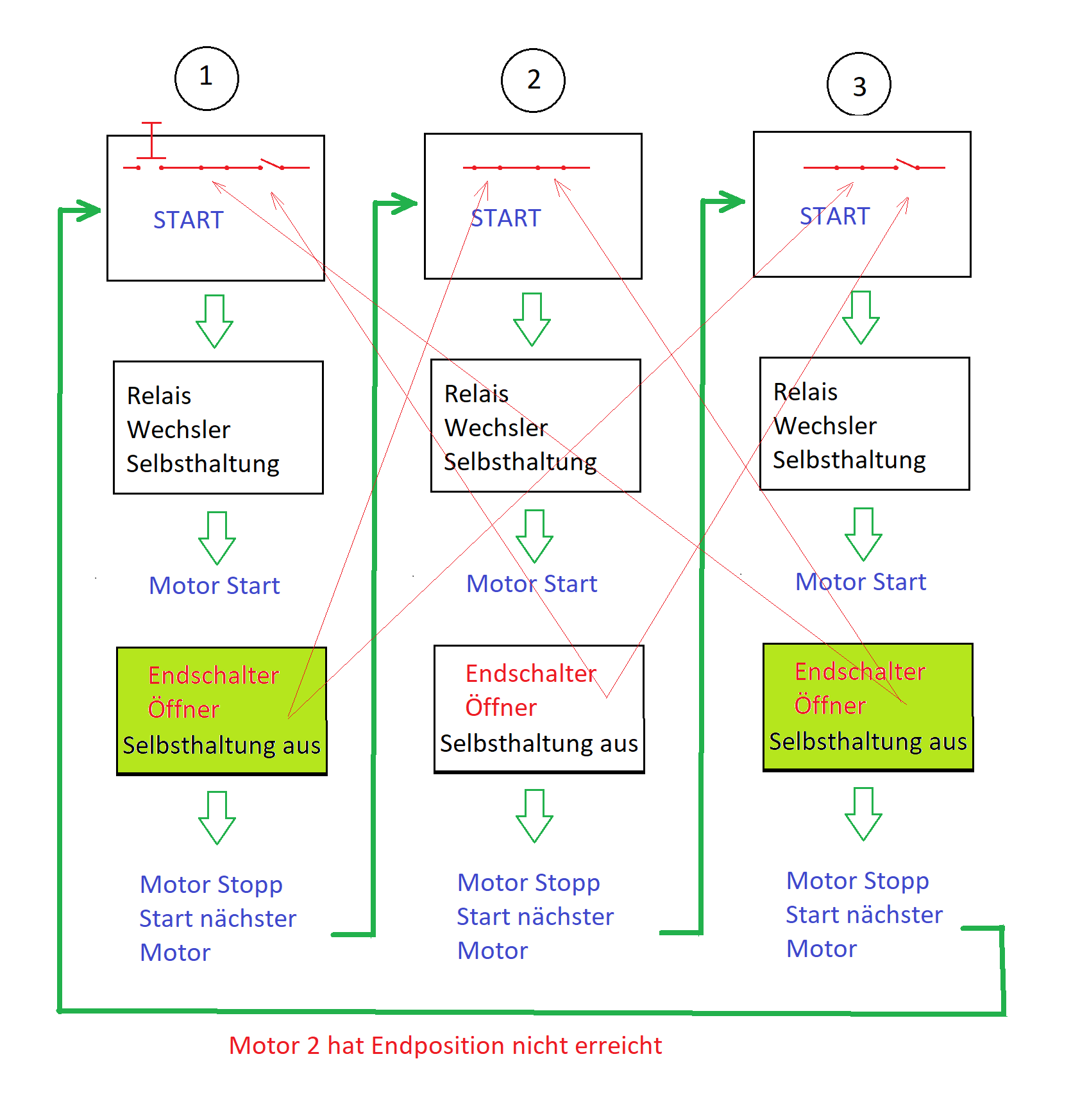
Hier mal mein Diagramm. Natürlich nicht Normgerecht. So eine Schützsteuerung könnte ich selbst bauen und würde für Konstruktion und Tests genügen. So richtig elegant wird das aber nur mit Steuerelektronik. Ich habe da gleich mal den "Fehlerfall" eingezeichnet. Motor 2 (Querverschiebung) hat Endposition nicht erreicht. Wenn ich jetzt den Starttaster drücke, passiert nichts. Ich müsste noch einen Taster pro Motor einbauen. Einer der der drei Taster würde dann reagieren. Grüße Bernd
Genau so hatte ich mir den elektrischen Teil der mechanischen Lösung vorgestellt, wobei ich einen groben Fehler meiner Lösung später noch erkannt habe. Aber auch hier, bei einer elektronischen Lösung, gib es Fehler. Wobei "Fehler" nicht von falsch, sondern von "fehlen" kommt: Die Motoren müssen weit vor dem Erreichen des Endpunktes beginnen zu bremsen. Oder sie müssen ungeheuer langsam kriechen. Um dieses Problem elektronisch zu lösen, wird mehr als nur Endschalter benötigt. Das Wissen um die Entfernung zum Endpunkt wird benötigt. Eine Lösung ohne großen zusätzlichen Hardwareaufwand dazu fällt mir aber ein. Ganz trivial würde es in der Software allerdings nicht.
Uwe, eine elektronischer Steuerung könnte man doch "Zeiten" einprogrammieren, wo z.B. gebremst wird. Der Ablauf wird ja recht konstant ablaufen. Grüße Bernd
Ja, kann man - wenn man ein System hat, bei dem das geht. Aber das ist offensichtlich nicht von der Stange zu bekommen, also muss man es selber programmieren und dabei so etwas vorsehen. Und da sehe ich folgende Herausforderung: Einfach nur eine Zeit anzunehmen, ist eine Schätzung. Da müssen Reserven bis zum endgültigen Stopp sein. Bis dahin muss der Motor also gaaaanz langsam laufen, damit der Stopp nicht ruckartig oder der verbleibende Auslauf nicht zu lang ist. Deswegen ist eine genauere Information, wie weit das Ziel entfernt ist, sehr hilfreich. Und wenn man schon selber programmieren muss, kann man das (teuer) aus Drehgebern an den Motoren oder (fast nebenbei) aus den Kommutierungssignalen von EC-Motoren (https://de.wikipedia.org/wiki/B%C3%BCrstenloser_Gleichstrommotor) ermitteln.
Hmm, ob die reichen? Hier gäbe es günstige Antriebe für den Testaufbau. https://www.amazon.de/Schneckengetriebemotor-Gouverneur-Selbsthemmende-Getriebemotor-T%C3%BCrschloss/dp/B0CFFCTVP2?source=ps-sl-shoppingads-lpcontext&ref_=fplfs&smid=A3CQAZL0O20ZD7&th=1 Für Quer und Runter bestimmt ausreichend, der Motor für die Hochbewegung benötigt das größte Drehmoment. Schön ist ja, dass eine Drehzahlregelung dabei ist. Es wird im Vorfeld kaum möglich sein, Gewichte und Drehmomente genau zu bestimmen. Beispiel: Die Regalböden (20 cm x 120 cm), bei der Länge braucht man was stabiles, damit die nicht in der Mitte durchhängen. Also Multiplexplatte mit 20 mm (sauschwer), oder Alu-Wabenplatte (leicht und teuer). Die zweite Variante wiegt nur noch ein Zehntel. Grüße Bernd
:
Bearbeitet durch User
Abgesehen davon, ob die Leistung reicht oder nicht - das ist ja nur eine quantitative, aber keine prinzipielle Frage: Als Teil irgendeiner Lösung bestimmt. Aber ob du damit deine Ziele erreichst, bezweifele ich, und der Rest muss ja auch noch realisiert werden. Du willst ja nicht selber an den 4 Potis drehen, um langsam zu beschleunigen und, komplizierter, rechtzeitig zu beginnen, langsam zu bremsen. Alles, was zwischen der Start-Taste, den Sensoren und den Motoreinheiten sein muss, muss auch geschaffen werden. Das ist viel mehr, als die Relais. Und es wird noch mehr, wenn beim Bremsen die Geschwindigkeit abhängig vom Endpunkt abhängig sein soll. All das wäre bei einer mechanischen Lösung mit Steuerscheiben und Relais unter deiner alleinigen Kontrolle zu realisieren, aber mit Elektronik wirst du wohl mit jemandem zusammen ein Team bilden müssen. Grüße Uwe
Angehängte Dateien:
-

IMG_0894.JPG
240 KB

Uwe, erstmal muss die Mechanik funktionieren, dann der Rest. Steuerscheiben sind machbar, aber nicht so ganz einfach. Eine Umdrehung des Motors enspricht ja nicht dem nötigen Verfahrweg, da aber die Kettengliedlänge fix ist, könnte ich mit passendem Kettenrad abtasten und den Schnell-Langsamlauf realisieren. Da stellt sich mir aber die Frage was wird teurer? Mechanik versus Elektronik? Zum Bauen und Probieren brauche ich keine aufwändige Elektrik oder Elektronik, das wird der zweite Schritt. Allerdings sollten verbaute Komponenten wie Motoren und Endschalter dazu tauglich sein. Sonst kaufe ich Zweimal. So, jetzt spiele ich mit der Modellbahn weiter. Grüße Bernd
Bernd F. schrieb: > Zum Bauen und Probieren brauche ich keine aufwändige Elektrik > oder Elektronik, das wird der zweite Schritt. Hallo Bernd! Deine Fähigkeiten kenne ich im Metallbau. Trotzdem, den Antrieb oder überhaupt die Antriebstechnik, da musst du dich in gewisser Weise schon ziemlich festlegen. Denn es wäre schade, wenn alles gut funktioniert, aber der eigentliche Motor gar nicht dran passt und du dann eine Frickellösung dazwischen bauen musst.
Bernd F. schrieb: > erstmal muss die Mechanik funktionieren, dann der Rest. Einverstanden. Aber sie muss die nötigen Freiheitsgrade bieten, die bis jetzt noch unbekannte Technik nachzurüsten. > Steuerscheiben sind machbar, aber nicht so ganz einfach. > Eine Umdrehung des Motors entspricht ja nicht dem nötigen > Verfahrweg, Könnte man da nicht für sorgen? > da aber die Kettengliedlänge fix ist, könnte ich mit passendem > Kettenrad abtasten und den Schnell-Langsamlauf realisieren. Wenn eine Umdrehung (bzw. der Umfang) eines der Kettenräder dem Abstand zweier Regalböden entspricht, ließe sich relativ einfach eine Möglichkeit realisieren, die recht genau sagt, wie weit ein Boden vom Endpunkt entfernt ist. Z. B. durch Anflanschen eines Drehgebers, teuer oder billig wie meine X/Y-Potis oder Aufbringen einer optischen Codierscheibe. Das ist vielleicht nicht so genau, wie gewünscht, aber zumindest genau genug, um rechtzeitig und gezielt zu bremsen. > Da stellt sich mir aber die Frage was wird teurer? > Mechanik versus Elektronik? Und die Frage: Wer macht die Elektronik? Ich gehe davon aus, dass es keine fertige Lösung gibt. Beispiel: Der Motor muss auch bei unterschiedlichen Lasten langsam mit einer definierten Geschwindigkeit laufen. Das ist nicht gerade das, wofür DC-Motoren ohne weitere Maßnahmen prädestiniert sind. > Zum Bauen und Probieren brauche ich keine aufwändige Elektrik > oder Elektronik, das wird der zweite Schritt. Wie gesagt - richtig vorbereitet sollte es sein. Und was das alles bedeutet, wissen wir noch nicht. > Allerdings sollten verbaute Komponenten wie Motoren und > Endschalter dazu tauglich sein. Sonst kaufe ich Zweimal. Vielleicht kann man auf Endschalter verzichten. Dazu müsste die Bestimmung der Position durch den o.g. Zahnradsensor genau genug sein, dass die vorgeschlagenen Anschrägungen der Gleitschienen den verbleibenden Versatz "schlucken". Könnte klappen. > So, jetzt spiele ich mit der Modellbahn weiter. Ich will mitspielen! Zumindest die Schienen sehen nicht wie von der Stange aus? Uwe
Uwe B. schrieb: > Und die Frage: Wer macht die Elektronik? Ich gehe davon aus, dass es > keine fertige Lösung gibt. > > Beispiel: Der Motor muss auch bei unterschiedlichen Lasten langsam mit > einer definierten Geschwindigkeit laufen. Das ist nicht gerade das, > wofür DC-Motoren ohne weitere Maßnahmen prädestiniert sind. Das gibts natürlich alles "fertig". In dem Sinne dass es keinen Elektroniker braucht. Im Bereich der Automatisierungstechnik gibt es fertige Antriebe, Sensoren und Steuerungen. Dafür ausgelegt von einem Techniker in Betrieb genommen zu werden. Deshalb auch meine Empfehlung zum Anfang mit der SPS. Nur billig ist das Zeug halt leider nicht. Dafür robust und erprobt.
> So, jetzt spiele ich mit der Modellbahn weiter.
Ich will mitspielen! Zumindest die Schienen sehen nicht wie von der
Stange aus?
Uwe
Doch schon, aber das ist alte Spur 0 (doppelt so groß, wie
die heute gängige Ho), die Teile sind zwischen 60-100 Jahre alt.
Alles Kunststofffrei. (Isolierpappe an relevanten Punkten).
Da das recht teuer ist, baue ich mir viel selbst (natürlich
auch aus Metall).
Grüße Bernd
Cyblord -. schrieb: > Im Bereich der Automatisierungstechnik gibt es > fertige Antriebe, Sensoren und Steuerungen. Dafür ausgelegt von einem > Techniker in Betrieb genommen zu werden. > Deshalb auch meine Empfehlung zum Anfang mit der SPS. Dann müsste man mal mit einem Spezialisten aus der Branche, einem Vertriebstechniker einer Firma, die für so ein Produkt gut aufgestellt ist, Kontakt aufnehmen. Es sind ja nicht ganz übliche Randbedingungen. Fallen dir Firmen ein, die in Frage kommen? Meine Welt ist das nicht.
Ich könnte ja mal meine Nachbarn fragen. https://www.stadler-schaaf.de/ Wäre doch ein schönes Projekt für die Ausbildung. Grüße Bernd
Bernd F. schrieb: > Fehlerfall" eingezeichnet. > Motor 2 (Querverschiebung) hat Endposition nicht erreicht. > Wenn ich jetzt den Starttaster drücke, passiert nichts Na ja, kann ja sein wenn der Strom ausgefallen ist oder der Motor klemmt. Kommt der Strom wieder, sollte der Motor ganz ohne Starttaster wieder anlaufen bis zum Endschalter. daher bistabile Relais. Klemmt er, will man gar nicht Start drücken. Dann ist hoffentlich eine Überlastsicherung durchgebrannt und schützt vor weiteren Schäden.
Bernd F. schrieb: > Beispiel: Die Regalböden (20 cm x 120 cm), bei der Länge > braucht man was stabiles, damit die nicht in der Mitte > durchhängen. Wenn die Dicke grösser sein darf, geht das sogar aus Papier. Die übliche Methode ist ein Rahmen und eine dünne Platte drin. Oder Metallregalböden.
Uwe B. schrieb: > Cyblord -. schrieb: >> Im Bereich der Automatisierungstechnik gibt es >> fertige Antriebe, Sensoren und Steuerungen. Dafür ausgelegt von einem >> Techniker in Betrieb genommen zu werden. >> Deshalb auch meine Empfehlung zum Anfang mit der SPS. > Dann müsste man mal mit einem Spezialisten aus der Branche, einem > Vertriebstechniker einer Firma, die für so ein Produkt gut aufgestellt > ist, Kontakt aufnehmen. Es sind ja nicht ganz übliche Randbedingungen. > > Fallen dir Firmen ein, die in Frage kommen? Meine Welt ist das nicht. Also sogar reichelt hat inzwischen eine Produktkategorie "Automatisierung" mit netten Bauteilen aus diesem Bereich. Dann gibt es natürlich die großen Namen: Siemens, P+F, Sick, IFM u.v.m Da muss man einfach mal schauen was man braucht und was es gibt.
:
Bearbeitet durch User
Angehängte Dateien:
-

100_8866__2_a.jpg
300 KB

Irgendwie muss ich aber aufpassen, dass das Regal nicht teurer wird, als der Inhalt. Aber bei meinen Stoppuhren (sagen wir mal durchschnittlich 150,- / Stück x 30 = 4500,- wird es schon knapp. Grüße Bernd
Michael B. schrieb: > Kommt der Strom wieder, sollte der Motor ganz ohne Starttaster wieder > anlaufen bis zum Endschalter. daher bistabile Relais. Das will man eigentlich gerade nicht. Ein, durch Stromausfall gestoppter Motor, sollte erst nach einer manuellen Freigabe wieder anlaufen.
Cyblord -. schrieb: > Michael B. schrieb: >> Kommt der Strom wieder, sollte der Motor ganz ohne Starttaster wieder >> anlaufen bis zum Endschalter. daher bistabile Relais. > > Das will man eigentlich gerade nicht. Ein, durch Stromausfall gestoppter > Motor, sollte erst nach einer manuellen Freigabe wieder anlaufen. Nur für zugängliche Maschine, hier aber ist alles abgedeckt in einem Kasten.
Beim Einräumen (Dekorieren) wird der Glasdeckel offen sein. Da könnte ich mir eine Totmannschaltung vorstellen: 2 Taster außen am Gehäuse, man braucht beide Hände um weiter zu verfahren, ist aber außerhalb des Quetschbereiches. Grüße Bernd
Ich habe noch einmal über meine - ursprünglich nicht unbedingt ernst gemeinte - Idee der voll mechanischen Lösung nachgedacht. Ziel war, dass mit einer Umdrehung des Antriebs die Kette genau ein Regalboden vor- oder zurück bewegt werden kann. Den Verlauf der Steuerkurve kann man leicht so machen, dass bei konstanter Motordrehzahl zu Beginn und zum Ende eines Transports die Geschwindigkeit zu- bzw. abnimmt und sogar für ein kleines Stück 0 wird. Dann braucht der Motor nicht einmal genau auf den Punkt zu stoppen, er darf nachlaufen und irgendwo in dem 0-Bereich stehen bleiben. Die ganze Elektronik und die präzisen Endschalter entfallen. Es bleiben die 4 bistabilen Relais, 4 Getriebemotoren und die Steuerscheiben mit einfachen Endschaltern, bei denen keine besondere Genauigkeit erforderlich ist - fertig. Du hättest die gesamte Konstruktion ganz allein unter Kontrolle. Ich hatte von Steuerscheiben geschrieben, aber später gemerkt, dass das nicht so geht, wie ich dachte. Nach neueren Überlegungen bin ich jetzt zu dem Ergebnis gekommen, dass es prinzipiell nicht mit 2-dimensionalen Steuerscheiben geht. Vielmehr müsste eine Art Schneckenantrieb realisiert werden. Eine Umdrehung der Steuerschnecke bewegt die Kette um einen Abstand der Regalböden. Die Kette läuft an der Schnecke längs, Stifte an der Kette (kugelgelagert), ich nenne sie Mitnehmer, werden durch die Steuerkurve geführt. Allerdings muss dafür gesorgt werden, dass diese Mitnehmer nicht zur Seite gedrückt werden, denn die Kette würde wahrscheinlich zu viel nachgeben. Sie brauchen also im Bereich der Schnecke eine Längsführung, die aber nicht sehr kompliziert sein wird. Die ganze Mechanik, also Schnecken, Kettenführungen und Getriebemotoren für den Vertikal-Antrieb lässt sich sicherlich im Boden unterbringen. Die Anforderungen an die Horizontal-Antriebe sind völlig anders. Geringere Kräfte, geringere Präzision. Da wird wahrscheinlich eine andere Lösung sinnvoll sein. Sofern du überhaupt Probleme mit der Konstruktion oder Fertigung, insbesondere der Steuerschnecke, hast, nehme ich an, dass diese Probleme dir erheblich weniger Kummer machen, als irgendeine elektronische Lösung, für die du externe Hilfe brauchst. Und es wird erheblich weniger kosten. Keine Präzisionsantriebe, ganz einfache Getriebemotoren von der Stange, keine Steuerelektronik mit aufwändigen Sensoren. Keine Programmierung oder Konfiguration einer SPS. Ich hoffe, meine Konstruktionsidee gut und verständlich genug beschrieben zu haben. Ein Bild sagt mehr als 1000 Worte, aber eine oder mehrere Skizzen wären für mich auch sehr aufwändig. Gerne erläutere ich das noch mal genauer. Als Elektroniker rate ich also von einer elektronischen Lösung ab. (Ich habe nur einen Hammer, aber das sieht mir wie eine Schraube aus.) Grüße Uwe
Angehängte Dateien:
-

kettenrad-12-zaehne.jpg
55 KB -

sinus.jpg
5,2 KB
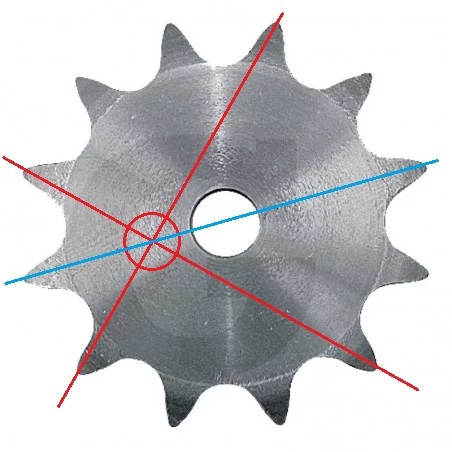
Ich bin nicht untätig. Zum Antrieb habe ich mir diese Lösung ausgedacht: Es bleibt bei 3 DC- Schneckengetriebemotoren. Um ohne Elektronik möglichst sanft Anzufahren und zu Bremsen, wird das Antriebsrad außermittig auf die Motorachse gesetzt. (Eine Umdrehung enspricht dem nötigen Weg). Das bedeutet zwar etwas mehr Weg für den Kettenspanner, sollte aber funktionieren. Bild 1 mit versetzter Achse, Bild 2 zeigt die Antriebs- geschwindigkeit. (Start mit ca. 1/2 bis 1/3 Maximalgeschwindigkeit). Zur Steuerung: Das wird ohne Elektronik ein Materialgrab. Deswegen übe ich gerade Siemens-logo. Das klappt besser als befürchtet. Mein erster! Plan ist nach ein paar Stunden fertig und macht auch in der Simulation das, was er soll. Ich bleibe dran. Grüße Bernd
Interessanter Ansatz! Gefällt mir. Kannst du nicht das Problem mit dem aufwändigeren Kettenspanner dadurch lösen, dass du ein anderes Zahnrad (aber nicht das obere) ebenfalls exzentrisch ausführst? Es müsste, soweit ich erkennen kann, die selbe Umschlingung (180°?) wie das Antriebszahnrad haben, aber sonst keine weitere Funktion. Aber vielleicht lohnt sich das gar nicht. Um den Effekt zu verstärken, könntest du auch zusätzlich das Zahnrad für den Abtrieb genau so exzentrisch ausführen? Oder - halt - würde genau das nicht sogar den Kettenspanner vereinfachen? Also doch das obere? Muss mich da 'reindenken... Nachtrag: Ich hab's! Der Kettenspanner müsste noch mehr Weg machen.
:
Bearbeitet durch User
Bernd F. schrieb: > Plan ist nach ein paar Stunden fertig > und macht auch in der Simulation das, was er soll. Gratuliere. Und jetzt lade dir einen zweiten Simulator herunter und binde Motoren ein. https://aceautomation.eu/de/produkt/ace-1450-sps-6-digitale-eingange-12-digitale-ausgange-2-thermoelementeingange-1-serielle-schnittstelle-rs232-rs485-modbus-ascii-1-modbus-usb-anschluss/ Das erspart dir den Zauber mit exzentrischen Zahnrädern, sorgt für sanften Anlauf und Abbremsen und ermöglicht es dir auf Tastendruck ein bestimmtes Tablet herbeizurufen. Bernd F. schrieb: > 3 DC- Schneckengetriebemotoren Überlege dir das bitte nochmals. Du tust dir damit keinen Gefallen und deine Angst vor Steuerungen ist wie du an der Logo gesehen hast unbegründet.... Sg
Angehängte Dateien:
-

Schaltplan_Regal.png
10 KB
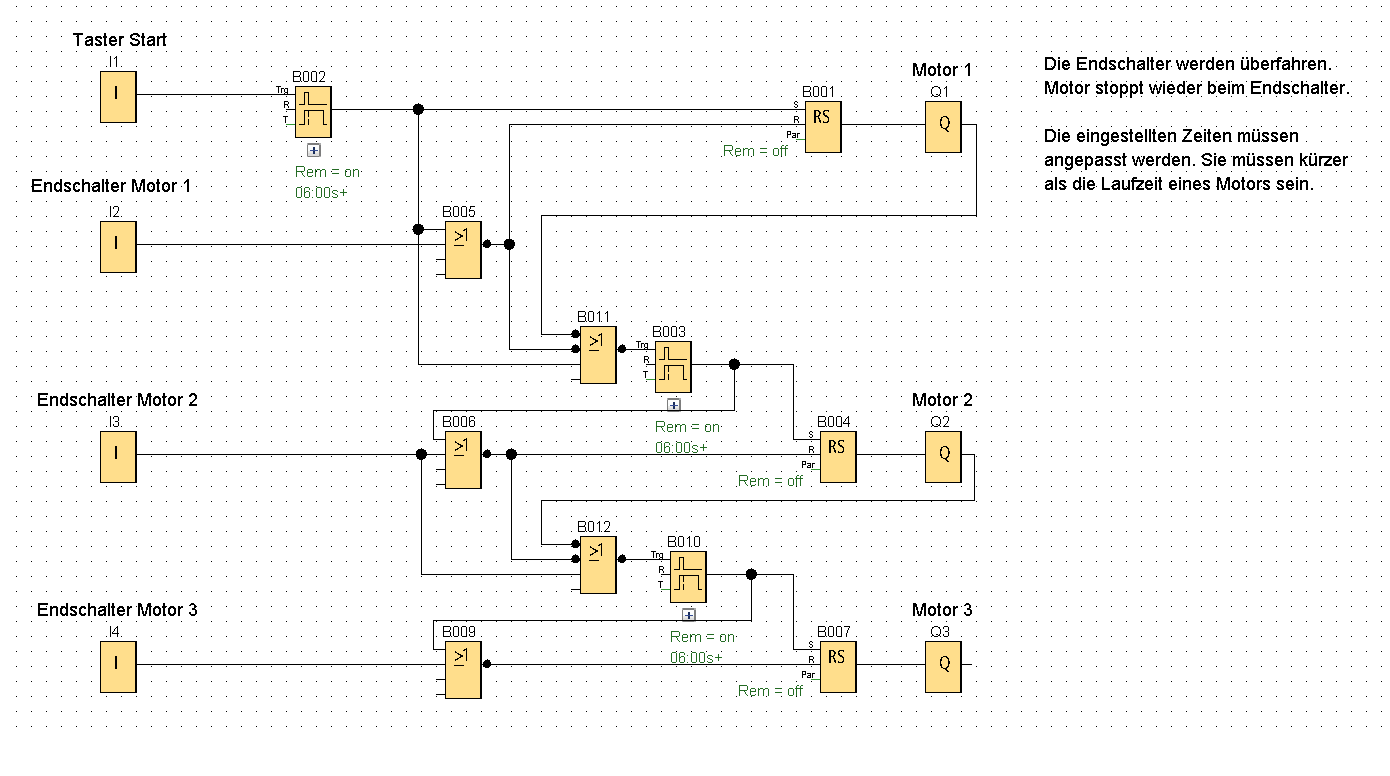
Danke für alle Antworten. Nun sollte man ein fast 70 Jahre altes Hirn auch nicht überfordern. So eine Logo-Steuerung kann doch PWM, eventuell läßt sich sanftes Anfahren und Bremsen ja da realisieren? Die DC-Schneckengetriebemotoren sind hier doch durchaus sinnvoll, um die hohen Haltekräfte im Stillstand zu haben. Anbei mal ein Bild meiner bisherigen Bemühungen. Das ist so bestimmt noch nicht fertig. Viele Grüße Bernd
Bernd F. schrieb: > So eine Logo-Steuerung kann doch PWM Uffpasse. Logo-PWM ist Pulspaketsteuerung, also seeeeeehr langsam. Du bekommst nur sehr wenige Impulse pro Sekunde, so 10 oder so. Wenn du 1% haben willst und somit Bereich 0-100 einstellst, dauert ein Zyklus halt 10 Sekunden, von denen dann 3,5 an und 6,5 aus sind bei 35%. Stellst du Bereich 0-2 ein, bekommst du 5 Zyklen pro Sekunde, aber eben nur 0/50/100%. Welcher Depp auch immer sich ausgedacht hat das als PWM zu vermarkten, er möge auf ewig 2 Sekunden nach dem Anziehen in was feuchtes treten. Ich mein, technisch isses eine, aber überall anders wird damit was deutlich schnelleres bezeichnet.
Ok. Diese Motoren werden mit Regelelektronik geliefert. (Drehpoti) Kann man eventl. diese Widerstandswerte am Ausgang simulieren? Viele Grüße Bernd (Schlossermeister seit 1978)
Es gibt 0-10V-Analogausgänge für die Logo, die haben auch eine feinere Auflösung von 10 bit. Evtl. kann man feststellen, das dieses Poti nur 5V bekommt und einen analogen Eingang ansteuert, dann könnte man mit einem Spannungsteiler auskommen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.