Dieser Thread wurde ausgelagert aus folgender Diskussion zum Thema
Umrichter für E-Kart Anwendung:
Beitrag "Umrichter für E-Kart Anwendung 60V / 120A"
und bezieht sich auf folgende Fragestellung:
[..]
1.)
Was mich persönlich noch interessieren würde: wie hast du die SVPWM für
den BLDC realisiert? [...]
Hingegen beim BLDC musst du ja die Rückmeldung vom Motor (sprich eben
die Rotorposition) berücksichtigen, und ich frage mich grade, wie man
z.B. die Hallsensor-Signale mit der RZM "verknüpft". Ich nehme einfach
mal an, dass die Hallsensoren den "Sektor" (siehe Artikel
"Frequenzumrichter mit Raumzeigermodulation") vorgeben, welcher grade
aktiv ist.
2.)
Werden die Ansteuersignale
dann hardwaremässig generiert oder so wie im genannten Artikel per SW?
3.)
Und - benutzt du Hallsensoren oder die BEMF, und wenn letzteres: wie
lässt du den Motor anlaufen?
[..]
Hi,
also zu 1.)
Ich habe die SVPWM als Matlab/Simulink Modell aufgebaut. Als
Eingangssignale benötigt die Software den elektrischen Winkel des Rotors
und den Betrag des Raumzeigers (Sollwert).
In Folge wird dann der Sector und Sectorwinkel bestimmt. Dann mittels
Trigonometie die Beträge der verschiedenen Einschaltzeiten der
jeweiligen Spulen berechnet.
Ausgangssignal SVPWM ist der Dutycycle pro Phase.
Das ganze habe ich mit dSPACE TargetLink in fixed-point-arithmetik
skaliert und anschließen in ANSI-C Code gewandelt.
zu 2.)
Hardwareseitig gehen die 3/6 Phasen PWM auf entsprechende Halbbrücken
die jede Phase treiben.
zu 3.)
Ich verwende einen AS5134 zur Bestimmung der Absolutposition und habe
eine Interpolationsroutine um aktuell auch bei Drehzahlen bis zu
9000/min noch genug Messwerte liefert um das Feld entsprechend genau zu
stellen.
Grüße,
Toby
Hi toby,
Also grundsätzlich verstehe ich dein Vorgehen schon.
Allerdings sind für mich Dinge wie dSPACE, TargetLink oder Simulink
Fremdwörter :-( wenn ich einen SVPWM-Algorithmus implementiere, benutze
ich dazu Excel, das geht auch ;-)
Also, wie gesagt - grundsätzliches Vorgehen ist bekannt, ABER:
bei "normaler" SVPWM wird das ja wie folgt gemacht:
- 1 Sektor = n Schritte
- Ein Timer läuft und zählt den Umlaufwinkel Omega hoch
- Anhand von Omega und des aktuellen Sektors werden die Einschaltzeiten
für jede Phase berechnet (z.B. mittels Sinustabelle)
- Wenn Omega = n, dann wird in den nächsten Sektor gewechselt und die
Einschaltzeiten neu berechnet; zudem wird Omega = 0 gesetzt.
Soweit ist das Vorgehen also klar; Aber wo kommen nun diese Hallsensoren
ins Spiel? Wie ich bereits angedeutet habe, nehme ich einfach mal an,
dass die Halsensoren den Sektor vorgeben. In meiner Vorstellung wird
dann wie folgt vorgegangen:
- 1 Sektor = n Schritte
- Mittels Timer wird die Zeit t gemessen, in der ein Sektor aktiv ist
- Ein weiterer Timer wird dann so konfiguriert, dass er alle t / n
Sekunden aktiv ist und Omega hochzählen kann. Anhand von Omega werden
dann die Einschaltzeiten der Phasen berechnet
- Wenn Omega = n, dann wird in den nächsten Sektor gewechselt, und der
Timer, welcher die Sektordauer misst, wird zurückgesetzt
Das Problem bei diesem Vorgehen ist natürlich, dass der Motor bereits
drehen muss, damit man ihn korrekt kommutieren kann. Das kann ich mir
aber irgendwie nicht vorstellen, denn so könnte man den Motor ja nicht
"hochfahren", ausserdem hätte man wohl einen Drehmoment- und
Drehzahlrippel, der daher rührt, dass die Berechneten Einschaltzeiten
von der Zeit für einen Sektor abhängen - sprich: wenn der Motor zu
Beginn steht, dann wird die Zeit t für einen Sektor unendlich lang, und
somit wird die ersten Phase des Motors unendlich lange eingeschaltet,
der Motor "ruckelt" kurz und steht dann in einer bestimmten Position
fest.
Also toby, wo liegt denn mein Denkfehler?
Kannst du mir weiterhelfen?
Kann man evtl. ein bisschen Code anschauen? Auf was für einem Prozessor
läuft die ganze Geschichte? dSPACE und Targetlink klingen fast irgendwie
nach TriCore oder irgendwas in der Richtung (jedenfalls nicht nach ARM
oder einem ATMEGA; ich nehme nicht an, dass die kleinen QFP48-ATMegas,
die man auf den Photos auf deiner website sehen kann für diese ganzen
Algorithmen zuständig sind).
Viele Grüsse
Tobias
Hallo Tobias,
schau dir doch mal den von mir genannten Sensor genauer an. Der liefert
mit nicht den Sektor, sondern den mechanischem Winkel der Motorwelle.
Mechanischer Winkel deshalb, weil die BLDCs oftmals mehrere Polradpaare
besitzen. Ein BLDC mit zwei Polradpaaren macht mit einer mechanischen
Umdrehung zwei elektrische Umdrehungen.
Der Sensor liefert mir also einen mechanischen Winkel und daraus
errechne ich mit mit Hilfe eines Offsets (Offset zwischen
Rotorpositionssignal und elektrischem Nullwinkel) den aktuellen
elektrischen Winkel des Rotors.
Aus dem elektrischen Winkel berechne ich mir wiederum den Sektor in dem
ich mich befinde und den Winkel innerhalb des Sektors.
Anschließend bestimme ich mit Vektoradditionen einen Vektor, der genau
Senkrecht auf dem Rotor-Vektor steht. Dieser Vektor (in der Literatur
meist Iq) wird dann in die Einschaltzeiten der Spulen zerlegt.
Ein Anlaufproblem ergibt sich gar nicht. Bei mir erzeugt des Feldvektor
durch die Positionierung "90° auf dem Rotor-vektor" ein Moment auf den
Rotor. Je nach Betrag dieses Vektors der Motor anlaufen oder bleibt eben
stehen solange bis die elektische Kraft groß genug ist. Wenn sich der
Rotor nicht in Bewegung setzt bleibt das Feld an dieser Stelle stehen.
Erst wenn der Hallsensor eine neue Position erkannt hat, wird das Feld
weiter gedreht.
Gruß,
Toby
Hi toby,
okay soweit ist mal alles klar.
Du hast also einen Sensor, der dir immer die Absolute Position des
Rotors liefert.
Geht denn die SVPWM bei einem solchen BLDC nur mit einem
Positionssensor, oder ist es auch möglich nur unter Zuhilfenahme der
Hallsensoren? (oder gar völlig sensorlos, nur anhand der BEMF).
Gruss Tobias
Geht auch prinzipiell auch ohne Sensor. Aber nur mit Sensor kann ich
auch im bei Stillstand des Rotor das Max-Moment bekommen. Ohne Sensor
braucht man einen definierten Startup bis die BEMF auswertbar sind.
Gruß,
Toby
Hi toby,
ja soweit klar.
Jetzt mal angenommen, du hast 3 Hallsensoren, die um 120° verschobene
Rechtecksignale liefern (du kennst das ja).
Wie würde man es da realisieren? Da hast du ja schon beim Startup
verwertbare Signale. Aber das Problem ist: Der Rotor kann innerhalb
dieser 120°, um die die Sensoren versetzt sind, an jeder beliebigen
Position stehen - wie willst du denn dann die richtigen Einschaltzeiten
für die PWMs berechnen?
Hi,
also das Prinzip mit den 3 Hall-Sensoren hat aus meiner Sicht Grenzen!
die Auflösung des elektrischen Winkels ist einfach zu klein. Im
Stillstand ist der mögliche Fehler groß, sodass sich das maximal
mögliche Moment nicht erzeugen lässt. Für eine Absolutposition braucht
man einfach genauere Sensoren, bspw.: Resolver, Inkrementalgeber, Potis,
usw...
Gruß,
Toby
Hi toby,
hmm wenn du meinst... also dann ist das wohl Essig mit 3 Hallsensoren +
SVPWM einen BLDC anzusteuern. Laut einer Atmel-AppNote geht es zwar,
wenn man, wie ich bereits vermutet habe, mittels eines Timers und der
Messung der Zeit, die ein Hallsensor aktiv ist, den Umlaufwinkel
interpoliert - aber die Genauigkeit dieses Verfahrens wird, denke ich
zumindest mal, zu wünschen übrig lassen. Daher muss man offenbar bei
BLDCs wirklich einen Resolver (oder ein Drehgeber würde m. E. auch
reichen) benutzen - oder aber den Motor konventionell mit einer
Blockkommutierung ansteuern (welche ja eigentlich auch nicht schlecht
funktioniert).
Nachteil der Blockkommutierung ist dann wohl einfach der
Drehmomentrippel, aber dafür ist sie recht simpel. Ich meine - mit
Blockkommutierung könnte man den BLDC wirklich mit reiner Logik
ansteuern; ein Controller wäre nur noch für die Regelung nötig.
Gruss Tobias
Also für Anwendungen wo es nicht auf glattes Drehmoment ankommt ist die
Trapezförmige Ansteuerung schon in Ordnung. Für ein Fahrzeug is das aber
suboptimal. Was aus meiner Sicht ganz gut funktionieren kann ist die
Kombi aus 3 Hallsensoren und einem Inkrementalgeber... Nach einem
Referenzlauf kann man ziemlich genau steuern.
Da bleibt viel Raum für Engineering ;)
hi toby,
also das mit den Hallsensoren + Inkgeber ist ansich schon ne gute Idee.
Allerdings - wozu braucht man eine Referenzfahrt? Ich meine, wenn man
weiss wie viele Inkremente der Geber liefert pro Umdrehung kann man ja
auch ausrechnen, wie viele Inkremente es sind pro Sektor.
Ah, mich juckts in den Fingern, das mal auszuprobieren. Wenn ich
demnächst einen Inkgeber autreiben kann, werde ich sowas mal aufbauen...
Mal ne Frage, hast du irgend eine Doku oder sowas dazu, wo die SVPWM
beim BLDC erklärt ist? Wie gesagt - ich hatte sowas bereits erfolgreich
implementiert für DAMs, was super läuft und sehr schöne sinusförmige
Ströme liefert. Allerdings bin ich mir noch nicht so ganz im Klaren
darüber, wie es denn mit dem Inkgeber ablaufen soll. Irgendwie ist das
dann ja total einfach. Jetzt mal angenommen, der Inkgeber ist so mit dem
Mikrocontroller verdrahtet, dass er automatisch ein bestimmtes Register
hoch zählt - dann müsste man ja theoretisch nur anhand der Hallsensoren
den Sektor bestimmen und anhand des Inkgeberwerts die richtigen Timings
aus einer Tabelle lesen.
Oder nicht? Wie macht das dein Programm?
Ich hab meine SVPWM-SW auch mal mit einem Inkrementalgeber getestet.
Dazu einfach eine Spule bestromen sodass sich der Rotor ausrichtet. Dann
den Impulszähler löschen und entsprechend der Drehrichtung neue Impulse
addieren oder subtrahieren. Somit kennt man die Rotorposition recht
genau. Zur Plausibilisierung bzw. zum Aufsynchronisieren kann man den
Zählerstand von Inkrementgeber mit einer bekannten Flanke vom Hallsensor
vergleichen und entsprechend handeln.
Gruß,
Toby
Hi toby,
du nochmal ne Frage.
Und zwar hast du ja gesagt, dass du das Feld immer so ausrichtest, dass
es in einem Winkel von 90° zum Roto steht, damit du maximales Moment
hast. Also "eilt" das Feld dem Rotor im Prinzip um 90° "vor", oder?
Hierzu habe ich noch eine Frage. Ich hab das jetzt mal so verstanden,
dass man für eine FOC im Prinzip eine "gewöhnliche" RZM macht, aber die
absolute Position des Rotos berücksichtig und das Feld so steuert, dass
es immer diesen 90° Winkel hat. Richtig?
Kann ich dann meinen bereits bestehenden RZM-Algorithmus einfach so
umbauen, dass er anhand des Drehgebers die aktuelle Rotorposition
bestimmt, 90° dazu addiert und dann anhand dieses Ergebnisses die
passenden Schaltzeiten für die PWM berechnet?
Ja das geht so prinzipiell schon. Für eine FO-Regelung fehlt aber die
Stromrückmessung für die Regelung. Google mal im Netz nach FOC, da
findest Du haufenweise Application Notes von TI und anderen
Chipherstellern.
Grüße,
Toby
Hi toby,
naja, wenn ich nach FOC google, dann finde ich eine ganze Menge an PDFs,
welche zwar erklären, wie man das macht mit der Clarke und Park
Transformation, aber der Kram ist immer so wahnsinnig mathematisch
erklärt - und damit habe ich ein bisschen Mühe, denn erstens bin ich
kein Mathematiker, und zweitens habe ich das E-Technik Studium noch
nicht mal begonnen :-( Ich verstehe also nur teilweise, um was es da
immer geht. Die RZM habe ich auch nur verstanden, weil dazu hier auf der
Seite ein guter Artikel ist, wo alles erklärt ist. Und daher läuft meine
RZM auch tadellos. Der nächste Schritt wäre natürlich schon die FOC,
aber wie gesagt finde ich da keinen einigermassen verdaulichen Stoff zu
- das ist alles so höllisch kompliziert beschrieben....
Aber gut, ich versuchs.
Frage 1: Was macht die Clarke- bzw. Park Transformation und wozu
benötige ich die? kann ich das auf einem ARM7 @ 70 MHz innerhalb einer
vernünftigen Zeit rechnen? So wie es aussieht, wird da ja mit Sinus und
Cosinus rum gerechnet. In meinem RZM-Algorithmus bin ich mit zwei
Tabellen gut zurecht gekommen, aber ich bezweifle dass das für die
Clarke- und Park-Transformation auch geht, denn mit den Tabellen hat man
immer gewisse Rundungsfehler, und die Ergebnisse der Clarke- und Park
werden ja weiter verrechnet, wodurch sich der Rundungsfehler immer
weiter vergrössern würde.
Frage 2: Was hat es mit diesen d und q auf sich? In einer AppNote von
Atmel habe ich gelesen, dass man mittels der Clarke (oder war es Park?)
die 3 Phasenströme eines BLDCs in das d und q-Format umrechnen kann.
Aha.
Und was bedeutet denn das schon wieder? So wie ich das verstanden habe,
sind d und q "einfach" ein "Modell" um sich die magnetfelder im Stator
vorstellen zu können. Liege ich damit wenigstens Ansatzweise richtig?
Mann mann, das Thema ist spannend, aber der Einstieg wird einem nicht
grade leicht gemacht ;-)
Ach ja: Du sagst, prinzipiell würde meine Vorgehensweise, wie ich sie
oben beschrieben habe, funktionieren, wenn ich noch eine
Stromrückführung hätte.
Es ist natürlich klar, dass man so eine braucht - ich nehme mal an, dass
der Grund dafür der gleiche ist, wie bei den DAMs. Bei kleiner Frequenz
-> kleinerer Innenwiderstand des Motors -> höhere Stromaufnahme ->
grösseres Drehmment. Richtig? Um das Moment konstant zu halten, wird der
Strom bei der FOC gemessen, und die Pulsbreite dann derart angepasst,
dass der Strom ausreichend gross für das gewünschte Drehmoment ist. Bei
den DAMs kann man das ja mittels konstanter U/f erreichen, aber das ist
nur eine Steuerung und nicht eine Regelung, daher kann es immer noch
sein, dass das Drehmoment nicht wirklich genau stimmt (was auch bei
meiner Anwendung der Fall war; fuhr man über den ganzen Frequenzbereich
des Umrichters, so was das Moment bei kleineren Drehzahlen relativ gut,
während es gegen oben immer weiter abnahm.).
Ich hoffe du kannst mir ein wenig weiter helfen,
Viele Grüsse
Tobias
PS:
Mir ist grade in den Sinn gekommen, dass ich dazu vor langer Zeit mal
irgendwo eine AppNote gespeichert hatte auf meinem PC. Nachdem ich sie
nun wieder gefunden und studiert habe, glaube ich, ungefähr zu wissen,
um was es bei der Clarke geht.
Und zwar sehe ich das wie folgt:
Der Motor hat 3 Phasen, welche durch 3 Vektoren (eben die Raumzeiger)
dargestellt werden können. Und mittels der Clarke kann man nun einen
dieser 3 Zeiger in zwei Komponenten zerlegen (Meist als Alpha und Betag
bezeichnet), und mittels dieser wird der Betrag und die Richtung des
Zeigers eindeutig festgelegt. Da man weiss, dass die 3 Raumzeiger immer
um einen Winkel von 120° zueinander verschoben sind, und man anhand der
Komponenten Alpha und Beta einen Zeiger kennt, kann man die Restlichen
berechnen anhand dieser 120°. Ist das richtig? (Das ist erstmal einen
Annahme, die ich getroffen habe; ich bin immer noch am Lesen ;-)).
Hi,
ohne das Studium und mathematisches Handwerkszeug fällt das Thema sicher
nicht besonders leicht. Vielleicht fällt Dir das Verständnis der ganzen
Appnotes leichter wenn Du weißt warum man diese Transformationen macht.
Für die Momentenregelung von E-Maschinen ist es wichtig den Strom zu
regeln weil I ~ F. Wenn man den Strom regelt, regelt man die Kraft.
Wenn man jetzt von außen auf den Motor schaut mit seinen 3-Phasen, kann
man von nur eine Spannung anlegen und der Strom im den Windungen fließt
zeitlich veränderlich - wünschenswerter Weise in Sinusform. Der Betrag
der Spannungen und der daraus resultierende Feldvektor, der an dem Rotor
"zieht" ist aber nicht einfach zu ermitteln.
Mit Hilfe der Transformation versetzt man sich in die Perspektive des
Rotors, sodass sich der eigene Bezugspunkt mit dem Rotor mitdreht,
dadurch ist es einfach den "benötigten" drehmoment erzeugenden
Feldvektor zu ermitteln (meistens Iq genannt) und diesen dann mittels
Rücktransformation wieder in das 3Phasen-System zu wandeln.
Lies Dir auch mal ein paar Notes zu E-Maschinen durch, was
Funktionsweise und Momentenerzeugung angeht... Ohne Mathe das aber
leider auch nicht so einfach.
Grüße,
Toby
Hi toby,
ja es ist mir klar dass es ganz ohne Mathe nicht geht ;-)
Aber wie gesagt besitze ich ja schon einige gewisse Vorkenntnisse. Auch
dass der Strom, und nicht die Spannung, für das Drehmoment
verantwortlich ist, ist mir bewusst.
Ich habe bereits verstanden, dass man mittels der Clarke und der
Park-Transformation die 3 Phasenströme, welche auf den Stator bezogen
sind, so umrechnen kann, dass sie sich auf den Rotor beziehen. Man hat
dann eben d und q, wobei ich gestern dann hier erfahren habe, dass d
möglichst auf 0 geregelt werden soll, während q die für das Drehmoment
verantwortliche Grösse ist und geregelt werden muss. Da dieses
transformierte "Koordinatensystem" mit dem Rotor mit dreht, sind d und q
Grössen, welche statisch sind und somit "leicht" zu regeln sind.
Was ich mich jetzt noch frage:
Wenn d Verluste erzeugt und q das Drehmoment - welches ist dann die
Drehzahlbestimmende Grösse? Klar, das ist schlussendlich die Frequenz,
aber diese ergibt sich ja dadurch, dass der Motor sich irgendwie dreht
und so die Kommutierung vorgibt. Sehe ich das richtig, dass die Drehzahl
sich automatisch anhand der Belastung des Motors und eben des
Drehmoments ergibt? Wenn ja q geregelt wird, dann hat man ja ein
konstantes Drehmoment, was bei fehlender Last eine grosse Drehzahl
ergibt und bei grosser Last nur eine kleine Drehzahl. (Das macht ja bei
einem Fahrzeug wie deinem Kart Sinn; man braucht ja ein möglichst
grosses Drehmoment, um zügig vom Fleck zu kommen).
Was ich mich noch frage:
Man misst ja die Ströme zweier Phasen, ia und ib. Diese werden mittels
Clarke zu ialpha und ibeta, und anschliessend mittels Park zu id und iq.
Soweit alles klar, auch die Berechnungen sind, wenn man diese Vektoren
sich mal aufzeichnet, einigermassen nachvollziehbar.
So, id wird dann auf 0 und iq auf den gewünschten Wert geregelt. Ich
habe aber in einigen AppNotes zu dem Thema gesehen, dass bei der
Rücktransformation (Park -> Clarke -> PWM) dann Spannungen, nämlich vd
und vq, verwendet werden. Und mir ist nicht ganz klar, wie man aus id
und iq die entsprechenden Spannungen erhält. Ergeben sich die dann etwa
einfach aus der Regelung, oder muss man da noch mehr rechnen?
Auf jeden Fall ist mir mittlerweile das Vorgehen schon einigermassen
klar.
Strom ia und ib messen, mittels Clarke zu ialpha und ibeta
transformieren, dann den Rotorwinkel messen und mittels Park den Winkel,
ialpha und ibeta in d und q transformieren. Dann regeln, mittels
inverser Park zu ialpha und ibeta zurücktransformieren (respektive
valpha und vbeta), und mittels inverser Clarke dann zu ia, ib (oder va,
vb). ic (oder vc) ergibt sich automatisch, da ia + ib + ic = 0.
Diese Werte kann man dann zur Berechnung der PWM heranziehen.
Richtig?
Hi,
hab Deine Passage überflogen. Wie es scheint hast Du die Sache schon
ziemlich gut verstanden. Das mit der Drehzahl hast Du selbst korrekt
hergeleitet. Allgemein ist es so - auch bei deinem Auto - dass Du mit
dem Fahrpedal das Moment des Motors einstellst, nicht die Drehzahl.
Sieht man daran, dass die Drehzahl hochschnellt wenn man die Last
wegnimmt (auf die Kupplung steigt).
zu Id. Id ist eine eigenständige Feldkomponene, die in Richtung der
Feldlinien des Permanentmagneten liegen. Diese wird im Normalfall zu 0
geregelt um keine unnötige Blindleistung zu erzeugen. Es gibt aber eine
Ausnahme, und das ist der Feldschwächungsbetrieb. Da nutzt man Id um das
Feld des PM zu schwächen und somit die Drehzahl noch weiter steigern zu
können (Verringerte Gegeninduktivität).
beste Grüße und viel Erfolg bei Deinen Versuchen!
Hallo,
ja mittlerweile verstehe ich so halbwegs, wie die FOC funktioniert.
Das einzige Problem, was ich noch habe, ist folgendes:
wenn ich d und q errechnet habe, dann sind das ja zwei Ströme. Die
werden geregelt, und aus der Regelgrösse muss ich ja irgendwie wieder
die Zeiten berechnen können für die PWM.
Dazu brauche ich ja aber 3 Angaben: Zeit für den Nullspannungsvektor,
Zeit für den einen Vektor und Zeit für den Zweiten. Wie kann ich denn
diese aus d und q berechnen? Klar, ich transformiere wieder zurück
mittels inverser Park und Clarke-Transformation, aber dann habe ich am
Schluss einfach wieder 2 Ströme. Was mache ich mit denen?
Gruss Tobias
Guten Abend Tobias,
ich klinke mich hier mal kurz ein und 'störe' eure Diskussion.
zu den Reglerausgangsgrößen:
valpha und vbeta kommen daher zustande, dass die Ausgangsgröße der
Regler nicht Strom, sondern Spannung ist.
Primitiv ausgedrückt hast du ein delta-Strom, das der Regler durch einen
entsprechenden Spannungswert ausgleichen will (und tut).
Nach den Rücktransformationen hast du deine zwei Spannungsvektoren va
und vb, die einen resultierenden 'Gesamtzeiger' ergeben. Dieser
definiert dir genau wie deine Spannungszeiger im dreiphasigen System
aussehen.
Gruß
Christian
Morgen Christian,
okay, also ist es tatsächlich so, dass ich am Regler-Ausgang eine
Spannung habe, und nicht mehr einen Strom. Danke!
Aber noch immer ist meine Frage ungeklärt, wie ich aus va und vb die
PWM-Zeiten berechnen kann, respektive halt eben die Zeit für die
einzelnen Vektoren.
Es gibt ja 6 Sektoren, und 6 verschiedene Spannungsvektoren:
001
011
010
110
100
101
So, jetzt wird ja in jedem Sektor zwischen zwei dieser Bitmuster hin-
und her geschaltet, z.B. im Sektor 1:
000 t3 / 4
001 t1
011 t2
111 t3 / 4
111 t3 / 4
011 t2
001 t1
000 t3 / 4
wie erhaslte ich denn nun aus den Spannungen va und vb die 3 Zeiten t1,
t2, t3, und das auch noch für jede Phase? Das ist mir noch nicht ganz
klar. Und ich glaube nicht, dass es sowas einfaches wie
dc_a = va / vdcbus
dc_b = vb / vdcbus
dc_c = vc / vdcbus
ist. Oder etwa doch?
Grüsse
Tobias
Hi,
die Anschaltzeiten musst Du für jeden Sektor einzeln berechnen. Es gibt
keine Formel die den Ausgang für eine Halbbrücke geschlossen über eine
volle Umdrehung bedient.
Grüße,
Toby
Hallo Tobias,
Ta = Zeit Anfangsvektor = proportional zu: sin (60-omega)* Motorspannung
in %
Te = Zeit Endvektor = proportional zu: sin (omega)* Motorspannung in %
To = Zeit Nullspannungsvektor = Pulsperiode-(Zeit Anfangsvektor + Zeit
Endvektor)
wenn omega der Winkel im jeweiligen Sektor ist. (von 0 bis 60 Grad)
Da immer alle Spannungsvektoren umgeschaltet werden, muss die Zeit für
alle drei Phasen nur einmal gerechnet werden.
Axel
Hi Axel,
deine beiden Formeln sind soweit schon klar. Die habe ich so ja auch
benutzt, als ich meine RZM implementiert habe ;-)
Aber das Problem ist ja: bei der FOC kriege ich keinen Wert für
"Motorspannung in %". Was soll ich denn da in die Formel einsetzen?
Gruss Tobias
Tobias Plüss schrieb:
> Aber das Problem ist ja: bei der FOC kriege ich keinen Wert für> "Motorspannung in %". Was soll ich denn da in die Formel einsetzen?
Der Betrag des resultierenden Zeigers, der durch deine Spannungen ua und
ub aufgespannt wird gibt dir den Wert.
Gruß
Christian
Verzeiht mir, dass ich den alten Thread nochmal ausgrabe, denke die
Fragen passen hier aber ganz gut :)
Ich bin gerade dabei einen FOC Regler für einen sensorlosen BLDC zu
bauen. Habe schon diverse App-Notes und Scripts durchgelesen, komme aber
leider immer noch nicht ganz dahinter.
Es wird ja immer geschrieben, dass alle PWM Signale mit einander und mit
dem ADC synchronisiert sein müssen. Außerdem sollen die PWM Signale auf
den symmetrischen Modus gestellt werden.
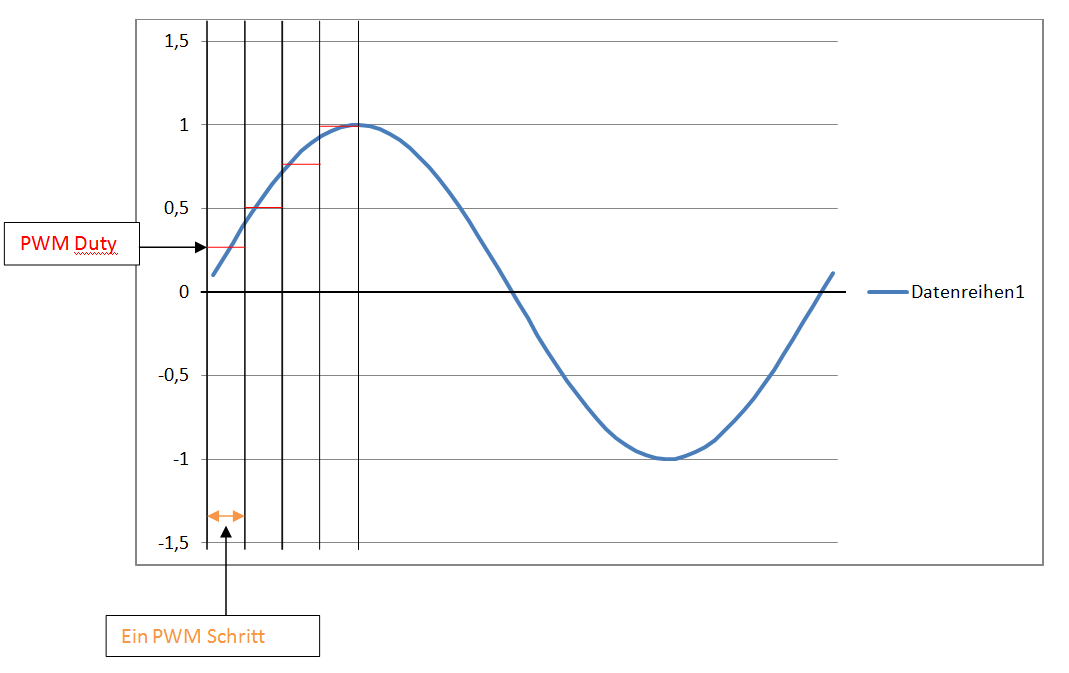
Verstehe ich es richtig, dass die Strommessung(en), die gesamte
Berechnung mit Clarke Trans- und Rücktransformationen, die
Vektorraummodulation und die Nachregelung der PWM Duty für jeden
einzelnen, also pro PWM Schritt ausgeführt wird?
Laut einem anderen Thread müssen für jede Strommessung, also bei jedem
ADC Interrupt, alle Brücken auf LOW-Side geschaltet werden. Damit würde
man doch alle Spulen für die Messdauer jedes Mal kurzschließen und den
Motor extrem ausbremsen, oder sehe ich das falsch? Wird diese Messzeit
als "Totzeit" bezeichnet?
Das ganze möchte ich erstmal auf einem ATMega2560 laufen lassen. Ist es
mit dem Controller grundsätzlich möglich, einen BLDC auf diese Weise zu
regeln? Ich erwarte auch keine hohen Drehzahlen, möchte es nur
ersteinmal auf einem ATMega ausprobieren. Meistens werden für diese
Anwendung ja schnellere µC’s verwendet, dspic33 zb.
Grüße
Hallo Andreas,
ja, die Strommessungen und die komplette Transformationskette sind
üblicherweise jeden PWM-Zyklus zu berechnen.
Die Nachregelung des PWM-Dutys machen deine zwei Stromregler (d/q).
Durch die Rücktransformation mit anschließender Vektormodulation stellen
sich die entsprechenden PWM-Dutys "automatisch" richtig ein.
Wenn du dir im center-aligned-Modus die Schaltmuster eines
Spannungszeigers aufmalst wirst du erkennen, dass es für jeden
Spannungszeiger eine Phase gibt, wo alle High-Sides aktiv und eine Phase
wo alle Low-Side-Schalter aktiv sind. Das ergibt sich aus der Tatsache,
dass man mit dem Spannungszeiger den Inkreis des Spannungs-6ecks abfährt
und somit nie 100% Vollmodulation hat -> folglich muss es Zeiten geben,
wo keine zusätzliche Energie in die Maschine geschoben wird.
Die Phasenströme werden üblicherweise in der Zeit gemessen wo die
Low-Sides an sind. Das macht die HW einfacher ;)
Als Totzeit wird die Überlappungszeit zwischen Low- und High-Side
Schalter bezeichnet, damit es zu keinem Querkurzschluss in den einzelnen
Brücken kommt.
Den ATMega kenne ich persönlich nicht, drum kann ich nicht viel dazu
sagen. Einen BLDC wirst du damit bestimmt zum Laufen bekommen, da ist
nicht viel dabei.
Für die von dir angesprochene PMSM mit FOC verwende ich die
dsPIC33FJ-Familie von Microchip. Diese bringen ein vernünftiges
PWM-Modul und einen ADC mit 4 S&H Stufen mit, d.h. du kannst alle drei
Phasenströme und die Zwischenkreisspannung zum exakt gleichen Zeitpunkt
sampeln.
Gruß,
Christian
Vielen Dank für deine ausführliche Antwort :)
Ich werde morgen oder am Wochenende die gesamte Rechnung mit
Beispieldaten am Papier mit Spannungszeigern aufmalen und durchrechnen
um es 100%tig zu verstehen. Aber es klingt schon einleuchtend, dass es
auch Zeiten geben muss, in denen keine Energie in den Motor geschoben
wird.
Mit der Totzeit sollte ich dann kein Problem haben, die Mosfet-Treiber
aus meiner Trapezregelung haben diese integriert, ich glaub 540ns waren
es.
Wie genau muss die Strommessung erfolgen bzw. welchen Messwiderstand
sollte ich verwenden?
In einer App-Note von Mircochip wird ein dsPICDEM MCLV-2 DEVELOPMENT
BOARD verwendet, hier kommen 0.025R Shunts zum Einsatz.
Wenn ich zum Beispiel einen 0.1R Shunt verwenden würde und die
Abfallende Spannung direkt mit dem 10Bit (0.049 Volt Genauigkeit) ADC
des AVRs auswerte, würde ich den Strom mit riesigen 0.049V / 0.1R =
0.49A Stufen messen. Das ist glaube ich schon seehr ungenau :D. Mit dem
0.025R Shunts von dem oben genannten Board wird noch schlimmer…
Also brauche ich unbedingt einen OP-Verstärker und passenden
Messwiderstand dazu.
Ich will zuerst einen CD Laufwerk Motor regeln(denke mal ~ 1Watt
Leistung) und später dann einen üblichen Quadcopter Motor mit ungefähr
15A. Ist die Leistungsspanne vielleicht zu groß um sie mit einem und
demselben Shunt und OP abzudecken und darauf die FOC Rechnung
aufstellen?
Ist es an dieser Stelle problematisch, wenn ich einen Doppelshunt und
evtl. einen Doppel-OP verwenden würde?
Grüße,
Andreas
Ich habe den ganzen Tag PDFs von allen möglichen Chipherstellern mit
Beispielanwendungen studiert. Gar nicht so leicht das ganze zu verstehen
:-D.
Ich finde hier ist es mit Abstand am besten erklärt:
http://www.microchip.com/stellent/groups/SiteComm_sg/documents/Training_Tutorials/en532365.pdf
Was mich noch interessieren würde: berechnest du mit dem dsPIC33 den
Winkel des Rotors Theta und Motorgeschwindigkeit Omega über „Position
and Speed Estimation“, also über ein digitales Motormodel + gemessene
Werte mit Korrekturfaktorbildung usw. oder verwendest du irgendwelche
zusätzlichen Sensoren am Motor?
Ist an dieser Stelle der Korrekturfaktor sehr wichtig oder würde es
reichen wenn ich (vorerst) diese Werte nur über das digitale Motormodel
berechne?
Wenn ich es richtig verstanden habe, muss man neben den Phasenströmen
auch die Phasenspannungen messen um den Korrekturfaktor zu bilden.
Die gesamte Rechnung scheint insgesamt doch sehr aufwendig zu sein, ich
zweifle immer mehr daran, das alles mit einem ATMega2560 berechnen zu
können.
Grüße,
Andreas
<comment>
Ich will dir nicht die Illusion nehmen, aber an einem Wochenende wirst
du diese komplexe Thematik nicht 100%ig verstehen - aber das nur am
Rande :)
</comment>
Das mit der Totzeit kann man nicht pauschalisieren! Es hängt im
Wesentlichen von der Schaltcharakteristik deiner Leistungshalbleiter ab,
ob du MOSFETs oder IGBTs verwendest etc.
Der Widerstandswert des Shunts hängt davon ab welchen Strommessbereich
du abdecken willst bzw. was die Verlustleistung des Shunts zulässt. Je
größer der Shunt, desto weniger musst du verstärken, desto geringer
der/die Fehler (desto höher die Verlustleistung!).
Bei einer FOC macht es Sinn "echte" Shuntwiderstände einzusetzen, da man
doch einigermaßen genau Messen sollte.
Bei Blockkommutierten BLDCs hat es sich bewährt über den RDSon der
MOSFETs zu messen.
Man sollte noch dran denken, dass du positive und negative Ströme messen
können musst. Du brauchst also eine OPV-Stufe mit ADC_ref/2 Vorspannung.
Wie man auf den Rotorwinkel kommt hängt immer von der Anwendung ab.
Pauschal kann man sagen, dass die meisten (einfachen) Modelle erst ab
einer gewissen Drehzahl Funktionieren, deshalb nur für Anwendungen
geeignet sind, die "immer drehen" (Lüfter, Waschmaschine, etc). Bei
Anwendungen wo Stillstandsmoment, hohes Anlaufmoment,
Positioniergenauigkeit (Servos) gefordert sind hat man üblicherweise
Rotorlagesensoren auf der Welle.
Stürze dich nicht gleich ins Verderben. Fang am Besten mit einem
gebergeführten System an, bringe es stabil ans Laufen und verstehe was
passiert. Wenn du gleich mit 100% einsteigst verlierst du schnell die
Motivation an der doch nicht so ganz trivialen Thematik.
Danach kanst du dich an die Rotorlagebestimmung über Modelle oder andere
Verfahren hermachen.
Wieso hängst du so an einem ATMega? Man nimmt den Controller mit dem man
die gestellte Aufgabe am einfachsten lösen kann.
Ich will jetzt nicht den Thread kaputt machen und die 1001ste Diskussion
um µCs lostreten, aber einen AVR würde ich persönlich nicht auswählen -
zumindest für Motorcontrol - da gibts um Welten geeignetere.
Grüße,
Christian
Hallo Andreas,
ohne das ich deinen Controller wirklich kenne (bin bei den alten Atmegas
ausgestiegen) denke ich, dass die Rechenleistung ein wenig knapp sein
wird. Meine erste Umsetzung habe ich auf einem kleinen 16bitter gemacht
und hier musste ich schon sehr stark tricksen. D.h. also nicht jede Pwm
Periode rechnen, sehr einfaches Modell für die Berechnung der Motorlage
etc.. Ich würde Dir einen Cortex Controller empfehlen. Da hast Du
ausreichend Luft und kannst dich auf das Wesentliche konzentrieren.
Die Strommessung legt man auf den Motor aus, d.h. auf das Drehmoment und
damit den Strom des Motor. Wenn Dein Motor z.B. im Normalen Betrieb
einen max. Strom von 1A braucht würde ich die Strommessung auf ca. 1.5A
auslegen. Die 0.5A hast Du dann Luft zum Beschleunigen des Motors und
z.B auch für Lastsprünge. Die Strommessung wird hierbei auf die
Spitzenwerte der Motorstöme ausgelegt und nicht auf die Effektivwerte.
Für die Implementierung ist ansonsten immer ein Lagesensor hilfreich.
Dass Motormodell für die sensorlose Regelung kann man dann immer noch
machen wenn der Rest läuft.
Grüße,Ralf
Hallo,
nach langer Zeit melde ich mich wieder. Ich habe mich für ein STM32F4
Board entschieden.
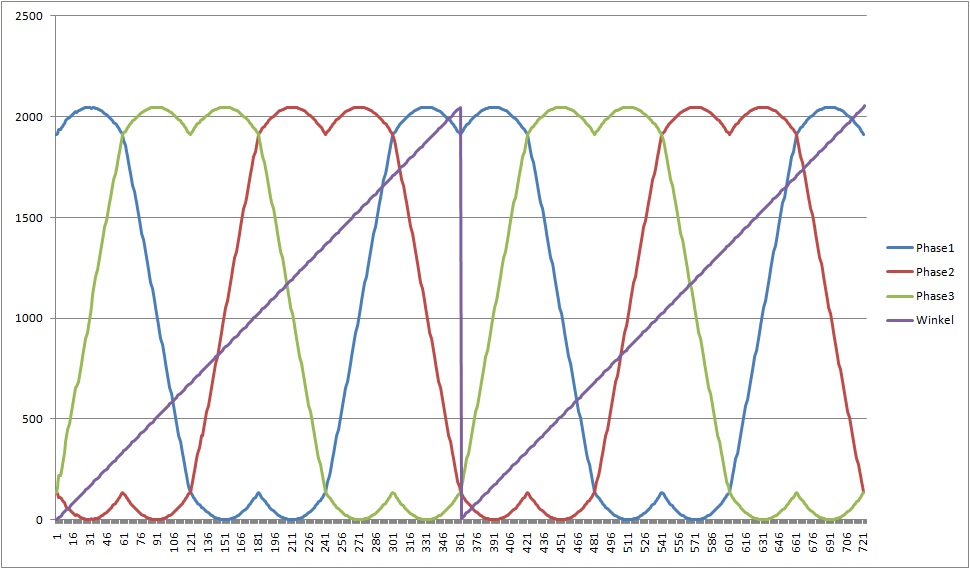
Zurzeit läuft der Motor mit 3 starren Sinuskurven (ohne SVPWM) und es
wird blind kommutiert, sprich der Winkel wird nach einer bestimmten Zeit
aufaddiert. Mit richtigen Werten läuft der Motor ruhig, leise und wird
nicht heiß.
Da mein Motor keine Sensoren für die Positionsbestimmung hat, bin ich
gezwungen, erstmal ohne SVPWM zu arbeiten.
Jetzt möchte ich anhand der gemessenen Phasenströme den Winkel ermitteln
und komme nicht so richtig voran.
Ist es überhaupt möglich, den Winkel zu berechnen, während der Motor
"blind" betrieben wird und der Winkel "blind" aufaddiert wird oder muss
dieser zwangsweise mit der ganzen FOC Regelung laufen damit der Winkel
errechenbar ist?
Grüße
Andreas
Seid ihr sicher, dass RZM mit einem bldc Sinn macht? Bldc sind dafür
konstruiert mit Blockkommutierung konstantes Moment zu erzeugen. Sinus
kommutierung ist da kontraproduktiv.
Schaut mal die induzierte Spannung an. Trapez? Dann Blockkommutierung
für konstantes Moment. Lässt sich aus dem energieerhaltungssatz
ableiten.
Hi Andreas,
die Berechnung der Position funktioniert auch so. Das ist ja die normale
Anlaufsituation eines des Motors, d.h. die Position ist zunächst
unbekannt (abgesehen von einer Positionierung), d.h. der Motor läuft
gesteuert hoch. Das Positionsberechnungsmodell schwingt in der Phase ein
und dann wird umgeschaltet. Eine komplette FOC brauchst Du dabei nicht.
Um die Positionsberechnung richtig einzustellen ist aber ein richtiger
Positionssensor sehr hilfreich!
Was mir noch nicht so ganz klar ist warum Du die SVPWM nur mit einem
Winkelsignal verwenden kannst. Die beiden Dinge sind unabhängig
voneinander. D.h. Sinus-Delta und SVPWM sind einfach nur Verfahren um
ein 3phasiges Spannungssystem mit einer PWM zu erzeugen.
Das was Karl schreibt ist auch richtig. Wenn Du aber eine sinusförmige
EMK misst ist alles i.O., d.h. die Sinuskommutation ist dann gut.
Gruß
Hallo Gonzo,
für SVPWM benötige ich ja den Spannungsvektor, welchen ich von der
inversen Park-Transformation erhalte. Für diese Transformation benötigt
man den Drehwinkel.
Was mir gerade auffällt, bzw. sich eine Frage stellt:
Muss ich für die Park- und Inv.Park-Transformation den elektrischen
Drehwinkel oder den durch den gemessenen Phasenstromvektor dargestellten
Winkel verwenden? Bisher habe ich versucht den Drehwinkel zu verwenden,
weil:
(Auszug aus Wiki)
"Um das d/q-Koordinatensystem mit korrekter Winkelgeschwindigkeit und
Phasenlage mit dem Rotor mitrotieren zu lassen, ist es notwendig die
genaue Lage in Form des Winkel Theta des Rotors zu kennen"
Grüße
Andreas
Moin Zusammen,
was das "messen" der Rotorlage angeht, wenn der Motor mit eine harten
Sinus gefahren wird ist erst mal garnicht so schwer. Du brauchst dafür
nur die Maschinen Gleichungen lösen.
Wenn du dir eine Phase als Rs, Ls und Spannungequelle(BEMF) vorstellst.
Läuft der einfachse Beobachter für den magnetischen Fluss darauf hinaus,
dassdu sagst.
V = i*Rs + d/dt*i*Ls + e (e ist die BEMF Spannung)
nach di/dt umgestellt:
di/dt * Ls = -Rs*i + V - e
Integriert:
i*L = int(V-i*Rs)dt - int(e)dt
Mit lamda als Fluss = int(e)dt
umdgestellt nach lamba:
lamda = int(V-i*Rs)dt - i*L
Das lässt sich leicht implementieren, bei dem Integrator solltest du
aber n
Hochpass hinter setzen, weil die sonst der Fluss weg driftet.
Übrigens Integrator und Hochpass ergeben einen Tiefpass mit der
Grenzfrequenz wie der Hochpass.
Wenn du dann den Fluss für jede Phase oder nur fürs Alpha/Beta System
berechnest kannst mit dem atan2 die Rotorlage berechen.
das ganze wird durch aller lei Fehler wie etweigen Stromfiltern usw.
verfälscht. Geht aber erstmal für einen Versuch.
Für einen richtigen beobachter solltest du dich zumindest mit dem
Entwurf eines Lunenberger Beobachters auskennen. Da gibts aber von ST.
z.b sogar n recht altes Paper zu.
Gruß
Tec
Hallo Andreas,
für die ganzen Transformationen brauchst Du zunächst nicht die realen
Winkel. Du kannst hier auch einfach was vorgeben. Der Motor läuft dann
eben gesteuert in einem falschen Arbeitspunkt.
Der normale Weg der Inbetriebnahme ist auch schrittweise, d.h. man nimmt
erst die SVPWM in Betrieb indem mann einfach sin und cos Spannungen
einer bestimmten Frequenz vorgibt (alpha beta Simulation). Damit kann
man dann auch die Strommessung prüfen. Im nächsten Schritt schaltet man
die Eingangstransformationen ein (Clarke/Park) und kann dann im nächsten
Schritt die inneren Stromregler samt Rücktransformation in Betrieb
nehmen. Zum Schluss folgt dann der Drehzahlregler und dann noch die
Lageberechnung. Die einfachste Variante ist die direkte Berechnung über
die Spannungsgleichungen des Motors wie von Tec beschrieben.
Was sich ggf. auch lohnt ist bei TI zu spicken. Hier gibt es sog. Build
Levels. Damit wird quasi die schrittweise Inbetriebnahme eine FOC
beschrieben.
Viele Grüße,
Ralf
Vielen Dank für die Antworten @ Tec und Gonzo!
Ich habs dank euch (und den anderen Usern drüber) nun geschafft, den
Winkel zu berechnen. Zwar ist das Ergebnis noch um 90° 'falsch' obwohl
ich ein Offset mitberücksichtige, aber die Ursache werde ich hoffentlich
noch finden.
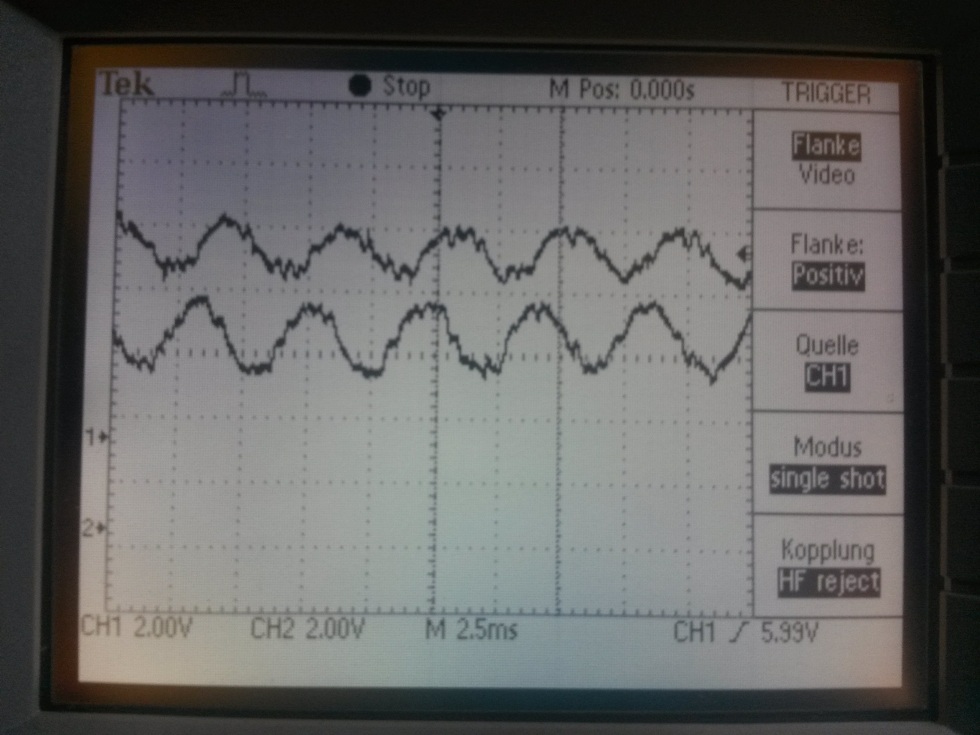
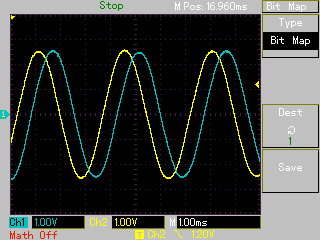
Die Berechnung überprüfe ich so, dass ich den tatsächlichen, künstlichen
Winkel und den berechneten Winkel jeweils über die DACs ausgebe und die
Signale am Scope vergleiche. (@Tec: habe mir jetzt ein DSO Scope von
Tektronix besorgt ;) )
Als nächstes muss ich die Regler zum Laufen bringen. (verstehe noch
nicht, wie die Referenzwerte für d und q zustandekommen)
Grüße
Andreas
Freut mich. Id ist eigentlich immer 0 fürs erste. Und Iq bildet dein
Drehmoment. M =Kt * Iq. Kt ist die Motorkonstante fürs Drehmoment. Was
die Transformationen nach Clark und Park angeht gibts beim englischen
Wikipedia gute Informationen.
Gruß
Tec
Guten Abend.
Ich fahre immer noch mit dem festen Winkel, er wird also fest nach einer
bestimmten Zeit erhöht.
Ansonsten wird der Motor jetzt komplett über SVPWM gesteuert.
Ich hätte eine Frage zu den Reglern.
Nach dem Anlaufvorgang, also nach der Umschaltung auf SVPWM merkt man,
dass die Stromaufnahme deutlich sinkt, alles gut soweit.
Nur wenn ich jetzt eine Störung hineinbringe, in dem ich zum Beispiel
kurzzeitig die Phasenstrommessung vom ADC abklemme, steigt natürlich die
Stromaufnahme und der Motor läuft unruhig.
Es dauert nun sehr sehr lange, bis die PI Regler sich wieder einregeln,
bzw. regeln die sich überhaupt nicht mehr auf den Ausgangszustand ein.
Kann mir vllt jemand einen Tipp geben?
(Ich arbeite vorerst bewusst mit Float, um die Zwischenergebnisse besser
nachvollziehen zu können, mit 1kHz keine Performance Probleme)
Initialisierung der Regler:
1
pParm->d_soll=0;
2
pParm->q_soll=0;
3
pParm->p_err1=0;
4
pParm->i_err1=0;
5
pParm->d_err1=0;
6
pParm->p_err2=0;
7
pParm->i_err2=0;
8
pParm->d_err2=0;
9
pParm->ki1=0.0003;//1;
10
pParm->kp1=0.0003;//1;
11
pParm->kd1=0.0;
12
pParm->ki2=0.0003;//1;
13
pParm->kp2=0.0003;//1;
14
pParm->kd2=0.0;
15
pParm->resfactor=1;
16
pParm->imax=0.9999;
Regler selbst:
1
floatd_actual_error=0;
2
floatq_actual_error=0;
3
4
//
5
m1.PI.d_soll=0;
6
m1.PI.q_soll=0.0019;
7
8
//calculation D factor
9
d_actual_error=(m1.PI.d_soll)-(m1.Id);
10
m1.PI.i_err1+=d_actual_error;
11
m1.PI.d_err1=(d_actual_error)-(m1.PI.p_err1);
12
13
//calculation Q factor
14
q_actual_error=(m1.PI.q_soll)-(m1.Iq);
15
m1.PI.i_err2+=q_actual_error;
16
m1.PI.d_err2=(q_actual_error)-(m1.PI.p_err2);
17
18
// PID = GainP * actual error + GainI * SUM(previous errors) + GainD * (actual error - last error)
Noch etwas:
Bei der Winkelberechnung für sensorlose Motoren muss Omega wegen des
Geschwindingkeitsreglers, welcher je nach gewünschter Rotordrehzahl die
Iq anpasst(SpeedPID), gefiltert werden.
Muss man Omega filtern, wenn man keinen solchen SpeedPID hat, sondern Iq
konstant hält?
Könnte ich Drehmoment und somit Drehzahl auch steuern indem ich Iq immer
auf 1 setze aber dafür den PWM Wert anpasse, den ich bei PWM Zeiten
Berechnung in der SVPWM verwende.
z.B:
void CalcTimes(void)
{
T1 = PWM * T1;
T2 = PWM * T2;
Tc = (PWM - T1 - T2) / 2;
Tb = Tc + T1;
Ta = Tb + T2;
}
Wenn nicht verständlich beschrieben, bitte sagen :)
Grüße
Andreas
Versuche mich an einer BLDC Steuerung. Benutze ein STM32F4. Da alles
'geklaute' an code nicht richtig funktioniert hat, der Motor hatte
Drehmoment Schwankungen. Habe ich selber ein paar Zeilen geschrieben.
Motor hat ein Encoder mit Index, also kenne ich die Rotorstellung. Hatte
zuerst eine Sinustabelle, da lief der Motor schon ganz gut, dann habe
ich die Popekurven in der Tabelle vorberechnet und der Motor läuft ohne
spürbares cogging. Habe folgende Probleme/Fragen ...
Wenn der Motor stillstehen soll lässt er sich von Hand kaum noch drehen.
Der Motor sollte laut Datenblatt bei 12V auf 80Upm kommen, ich schaffe
aber nur 50.
Meine China 3Phasen Brücke hat leider nur einen Shunt zu strommessen.
Wollte jetzt aber gerne alle 3 Phasen messen (das muss wohl so fürn
Foc), und suche nach der einfachsten Möglichkeit 3 Stromsensoren
nachzurüsten.
Also mit möglichst wenig Bauteilen, weil ich das ja irgendwie an die
Platine kleben muss. Habe Allegro ACS Sensoren gefunden, sind aber ganz
schön teuer. Gibt's was günstigeres was ähnlich ist?
Die Strommessung ist auch mit "single shunt" möglich. Dazu gibt's einige
Application Notes im Netz, das muss man hier nicht wiederkäuen.
Man braucht halt einen Controller, der pro PWM-Zyklus den ADC an
berechneten Zeitpunkten triggern kann.
Gruß
Christian
> Die Strommessung ist auch mit "single shunt" möglich.
Ja aber nicht so richtig, es gibt Bereiche bezogen auf die Rotorposition
wo nicht gemessen werden kann. Oder.
Ja, richtig. Da macht man dann quasi einen Blindflug. Es gibt aber auch
Verfahren mit denen man sich auch in diesen Situationen ein Messfenster
erzeugen kann. Man verschiebt dabei die Pulsmuster so gegeneinander,
dass eine Messung möglich ist, der Motor aber quasi nix davon
mitbekommt.
Ob ein Einsatz möglich ist hängt immer von der Anwendung ab.
Guten Abend.
Ich arbeite immer noch an der sensorlosen FOC Steuerung.
Die gesamte Elektronik habe ich auf einem Steckbrett aufgebaut, was ja
nicht gerade förderlich ist, vor allem bei der Strommessung der
einzelnen Phasen.
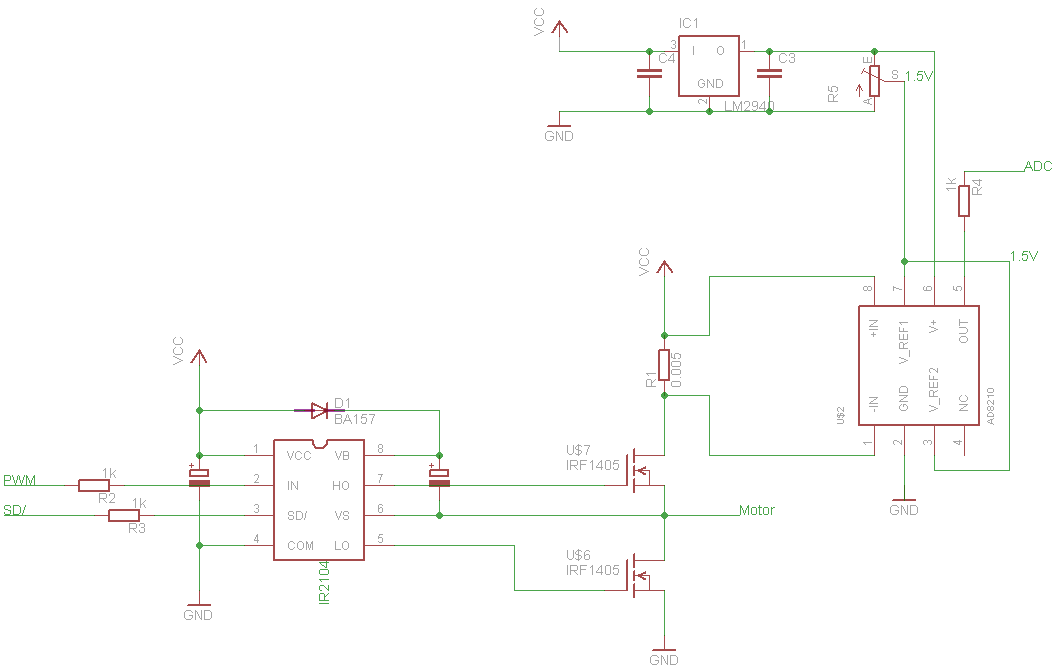
Im Anhang ist mein Schaltplan für eine Phase. Diesen würde ich 3x auf
einer Lochrasterplatine aufbauen. (Den Teil für die Strommessung
natürlich nur 2x)
Denkt ihr, der Schaltplan ist so in Ordnung? Ich möchte es "schön"
aufbauen und nicht im Nachinein noch 20 Änderungen machen müssen :)
Grüße
Andreas
Ne Frage zu den Nebenschlusswiderständen. Man bräuchte ja nur 2
Wiederstände. Sollte man aber nicht besser trotzdem 3 Wiederstände
einlöten und ggf. nur 2 Messverstärker? 3 Widerstände damit alle Phasen
den gleichen Wiederstand nach Gnd bzw. Vcc haben. Oder kann man das
vernachlässigen?
Hi,
ohne jetzt alle Bauteile im Detail zu kennen...
Wieso hast Du den Shunt nach oben gepackt? Ich würde den Shunt in die
Fusspunkte der Halbbrücken legen. Dann kannst Du einen einfachen
Rail-to-Rail OpAmp für die Strommessung nutzen. Den benötigten Offset
stellst Du dann über die Eingangsbeschaltung ein.
Du hast keine Gate-Widerstände in der Schaltung.
Gruß,
Gonzo
Stimmt, man sollte natürlich für jede Phase einen Shunt verwenden.
Sind Gate R's unbedingt notwendig? Würden da 20 Ohm ausreichen?
Ich messe in der HI Side, weil ich in der Low Side Messung eine neg.
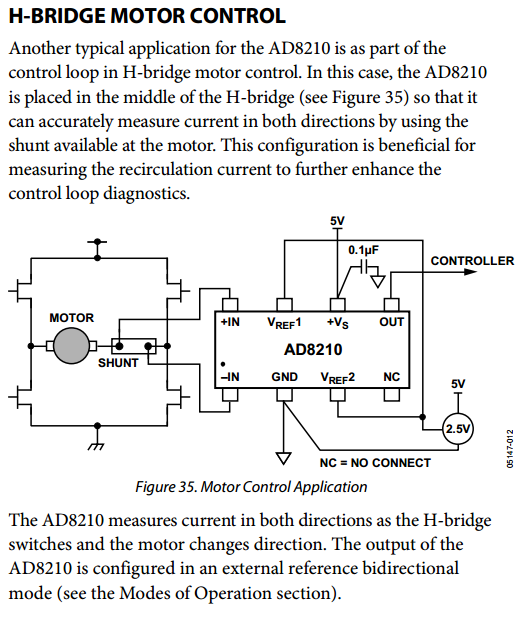
Spg. für die OPs erzeugen müsste. Der AD8210 kann mit Single suply
bidirektional messen, muss aber dafür in Hi Side sitzen. (Wenn ich das
Datenblatt richtig verstanden habe)
Grüße
Andreas
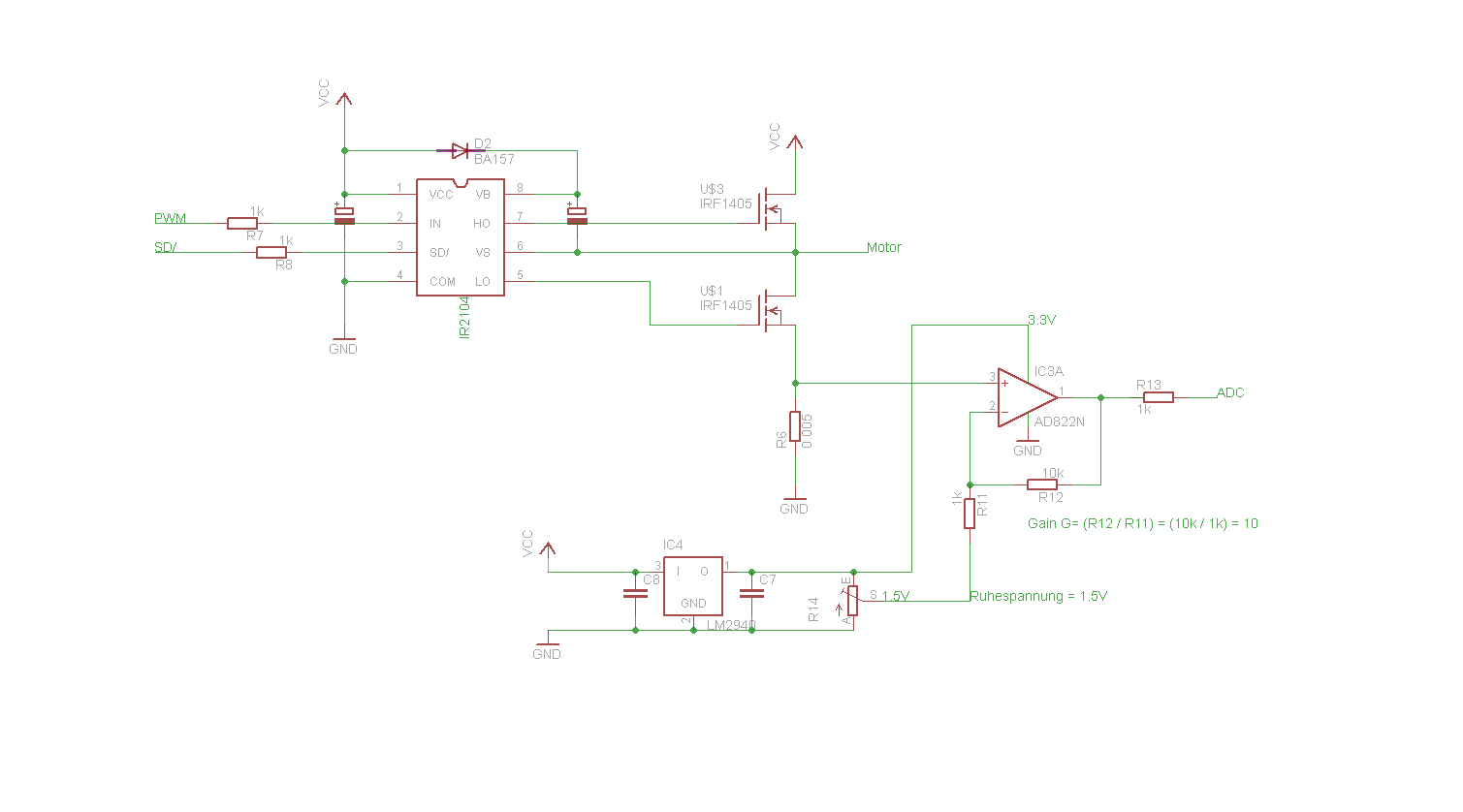
Für die OpAmps brauchst Du eigentlich keine neg. Spannung. Ich mache das
so, dass ich die Ausgangsspannung so einstelle, dass die Ruhespannung
bei I=0 in der Mitte des Aussteuerbereichs des ADCs liegt. Diese
Offsetspannung rechne ich dann zur Laufzeit wieder raus. Für die Messung
verwende ich dann einen OpAmp den ich mit einer einfachen Versorgung von
5V bzw. 3,3V betreiben kann. Der OpAmp sollte ein Rail to Rail Typ sein.
Gatewiderstände sind nicht zwangsweise notwendig. Es gibt auch Treiber
die entsprechend abgestimmt sind. Schaden kann ein Widerstand aber
meines Erachtens nicht. Die Platzierung sollte möglichst nah am Gate
sein. Hier lasse ich mich aber auch gerne korrigieren. Komme eher aus
der SW Ecke :-) Die Größe des Widerstands hängt von den verwendeten
Komponenten/EMV ab. Hier muss man immer ein wenig probieren. Manchmal
verwendet man auch noch einen Parallelzweig mit Dioden um das Ein- und
Ausschaltverhalten getrennt abstimmen zu können.
Gruß
Mit den Gate-Widerständen werde ich wohl ein wenig probieren müssen :).
Zur Strommessung:
Es wäre natürlich super wenn ich ohne der zwei AD8210 auskommen würde.
Habe ich deine Beschreibung richtig verstanden? (Schaltplan)
Dann würde ich sogar mit nur einem Bauteil auskommen, denn der AD822 hat
ja 2x Rail to Rail OpAmp's die ich für die zwei Phasen verwenden kann.
Und zufällig habe ich hier ein paar rumliegen :)
Edit: sehe gerade selbst, so wie ich es im Schaltplan gemacht habe, kann
es nicht funktionieren :(
Grüße
Andreas
Schau dir mal das Demo von ST an. Hier findest Du den grundsätzlichen
Aufbau der Schaltung wie ichs in etwa machen würde.
http://www.st.com/web/en/catalog/tools/PF247220
Nicht verwirren lassen, die OpAmps sind im Halbbrückentreiber
integriert.
Im prinzip hast Du einen normalen nicht invertierenden Verstärker, d.h.
über die Rückkopplung stellst Du die Verstärkung, d.h. den Messbereich
ein.
Am +Eingang des OpAmps ziehst Du über einen Spannungsteiler die
Ruhespannung etwas hoch damit am Ausgang eine Spannung von z.B. 2,5V
liegt wenn kein Motorstrom fließt (bei 5V Versorgung des ADC). Der Shunt
liegt zu diesem Spannungsteiler in Reihe. D.h. wenn Strom fließt wird
das Potential durch den Strom weiter angehoben oder eben abgesenkt.
Damit kannst Du positive und negative Ströme messen.
Gruß,
Gonzo
Andreas True schrieb:> (Ich arbeite vorerst bewusst mit Float, um die Zwischenergebnisse besser> nachvollziehen zu können, mit 1kHz keine Performance Probleme)
Habe mal die SVPWM mit LPC hier aus dem Forum in Float umgebaut und
verglichen. Festkomma 1.9us, Float 1.7us. Code ist nicht 100% identisch
z.b. habe ich eine Volle Sinus und Cosinus Tabelle benutzt. Dafür wird
im Float Code zwischen zwei Tabellen Werten interpoliert.
Wie immer vielen Dank für die Hilfe, ohne euch hätte ich bestimmt schon
längst aufgegeben :)
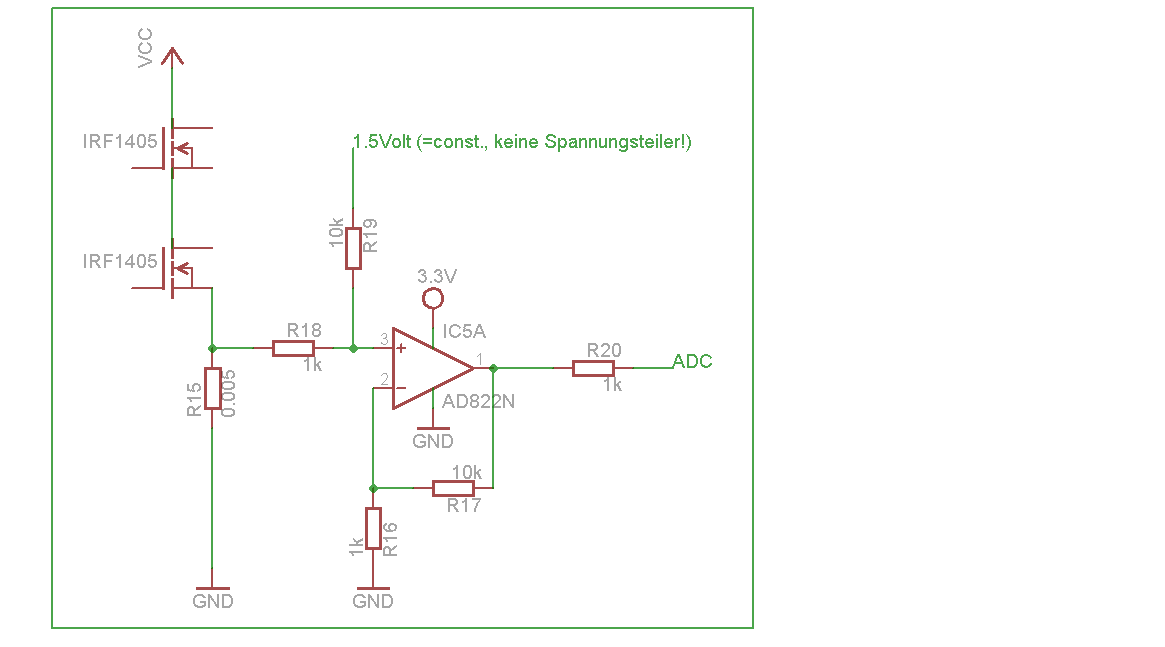
Ich habe jetzt die Schaltung für die Messung so Ähnlich aufgebaut, wie
in der PDF von st. Funktioniert auch wunderbar (zumindest mit einem
Lastwiderstand statt H-Brücke) Benötigt aber ganz schön viele Bauteile.
Spricht von der Softwareseite aus etwas dagegen, wenn ich bei meiner HI
Side Messung bleibe?
Speziell bei der Bestimmung des Space Vektors und der PWM Timings. Die
meisten App-Notes gehen ja davon aus, dass in der Low Side gemessen
wird.
Einfach ausprobieren kann ich noch nicht, weil meine Software immer noch
nicht anständig läuft (PID Parameter -.- )
@Laufzeit:
als ich zuletzt gemessen habe, hat bei mir eine Berechnung mit Float
(auf der FPU) ca 20us gebraucht, allerdings ohne Optimierungen oder
Ähnliches. Allerdings muss bei mir ja der Winkel Estimator mitlaufen,
was ja bei der Version aus dem Forum nicht der Fall ist. (oder doch?)
(läuft auf STM32F4 Board)
Grüße
Andreas
Hallo Andreas,
bzgl. der Bauteilanzahl hast Du natürlich ein paar Widerstände mehr. Aus
meiner Sicht spricht grundsätzlich auch nichts gegen die Messung im
Highside Kreis wobei ich den Baustein von Analog nicht kenne. Die
einzigen Argument die mir jetzt dagegen einfallen sind die folgenden:
- Die Messung in der Lowside erscheint mit aus Bauteilsicht flexibler,
d.h. es gibt eine größere Auswahl an OpAmps
- Aus Sicht der Potentiale/GND-Anbindung ist die Messung im Lowside
Kreis denke ich günstiger da man immer direkt den GND Bezug hat. Bei der
Highside Messung muss man ja alles erst mal runter auf den GND Bezug
bringen
- Wenn Du in Zukunft mal die Modulation in Bezug auf Schaltverluste
optimieren möchtest ist die Messung in der Lowside günstiger da der
Lowside auch statisch eingeschaltet werden kann. Das ist bei der
Highside aufgrund der Bootstrapbeschaltung nicht möglich. Wenn Du den
Lowside statisch einschaltest kannst Du in der Highside aber keinen
Strom messen.
Bzgl. der Abtastzeitpunkte sollte es denke ich keine Probleme geben. Bei
der Highside Messung musst Du halt zum Zeitpunkt des (1,1,1) Vektors
messen.
Was Du ggf. noch probieren/ansehen könntest wäre die Messung direkt in
den Motorphasen. Geht das vielleicht auch mit dem Analog Baustein? Dann
wärst Du völlig flexibel und kannst zu beliebigen Zeitpunkten die Ströme
messen.
Gruß
Hallo Gonzo,
der AD8210 wurde mir hier im Forum empfohlen, soll auch extrem genau
sein. Vermutlich weil die Widerstände und alles andere integriert ist.
Nachteil ist aber der feste Gain und nur 0.65mm Pinabstand. Und ist
nicht gerade günstig,
wobei es hier für mich keine Rolle spielt.
Das mit der Flexibilität ist wirklich ein Vorteil. Vor allem gibt es ja
auch dsPIC (somit bestimmt auch ARM Cortex) Controller mit integrierten
OpAmps, die man dann für LowSide Messung verwenden könnte.
Optimierung der Schaltverluste ist natürlich auch ein gutes Argument
gegen die HI-Side Messung.
Bei der Messung direkt in den Motorphasen bin ich mir nicht ganz sicher.
Hab schon einen AD8210 gekillt weil ich vermutlich -IN und +IN
vertauscht hatte. Zudem heißt der Baustein ja eig. High-Side Current
sense.
Wenn man sich aber die Grafik im Anhang (Datenblatt s.14) anschaut,
sieht es für mich so aus, dass der Chip eigentlich auch in der LowSide,
oder eben auch direkt in der Phase des Motors einsetzbar sein muss.
Wegen der H-Brücke kann ja auch auf der -IN Seite ein Plus auftauchen.
Vllt sollte man die Profis im Analogbereich fragen :)
Grüße
Andreas
Ist wahrscheinlich besser mal die Experten zu fragen. Wie schon
geschrieben beschränken sich meine Kenntnisse auf den diskreten Aufbau.
Cortex Controller mit integrierten Verstärkern gibt es auch schon. Hier
kannst Du Dir mal die F3 Serie von ST ansehen. Ansonsten gibt es hier
auch was von Renesas (irgendein Rx Derivat). Die integrierten Verstärker
sind aber aus meiner Sicht auch nicht wirklich die optimale Lösung. Hier
ist das Layout sehr entscheidend da ja alles auf der gleichen Masse
hängt (eigene Erfahrung :-(). So hat halt alles seine Vor- und
Nachteile.
Viele Grüße...
Moin,
Rein analog ist der STM32F303 usw. sehr gut für FOC. Die internen Opamps
würde ich aber nicht mehr verwenden. Weil die interne Verdrahtung im
Proze leicht komisch ist. Im RM steht zwar was davon das man den Vout
direkt auf einen ADC geben kann. Aber da hatte ich immer komische
Störungen drauf. Wenn man den ADC auf den Pin schaltet auf dem auch Vout
des OPs raus geht geht das besser. Warum weiß ich auch nicht. Vllt ist
der Ausgangstreiber des Pins von Vorteil.
Bei einem Redesign würde ich für meine Umrichter den STM32F3 verwenden
aber mit externen Opamps und Komperatoren für Überstrom usw. Unabhängig
vom Proze. Die 2 SO8 kann ich verschmerzen.
Das sind meine Erfahrungen mit dem Proze und internen OPs.
Gruß
Tec
Andreas True schrieb:> @Laufzeit:
Ja Zeiten sind ohne Winkelschätzung.
Habe noch ein paar LTC6104 gefunden. Messe damit den Phasenstrom vom
Motor. Und es geht besser als ich dachte. Trotz wild west Verkabelung
habe ich nur ~5 Counts "rauschen" mit 10bit ADC. Jetzt kann ich auch mal
mit der Vorwärts Clark und Park spielen.
Habe mir noch INA213 (kosten nur 2€ etwas bei C) besorgt aber die passen
nicht auf die SMD Adapter die ich eigentlich benutzen wollte.
Hi Tec,
das mit den Störungen auf dem STM32F3 ist interessant. Ich habe dieses
Phänomen bisher noch nicht gesehen, d.h. bei mir passt die Messung. Wie
haben sich die Störungen bei Dir gezeigt?
Würde beim nächsten Projekt aber auch auf eine externe Beschaltung
gehen. Spez. da ich im Moment aufgrund meiner Pinbeschränkung den PGA
nutzen muss und damit die Signalanbindung bzgl. Masse ziemlich eklig
ist.
Gruß,Gonzo
Moin,
ich hatte Probleme mit EMV, ich hatte synchron zur PWM Ecken in der
Messung.
Und teilweise Offsets von 20mV, was bei meinen Stromsensoren ca. 1A ist.
Über extern gelegt war das Offset weg und der Einfluss der PWM war
merklich geringer.
Hallo
ich bin ein kleiner Neuling auf diesem Gebiet...
den sensorlosen Teile habe ich soweit verstanden, allerdings habe ich
noch Probleme bei der Umsetzung bezüglich der SVM.
Mir ist bewusst das ich mehrere kHz benötige was die Modulationsfrequenz
anbelangt um einen sauberen Sinusverlauf zu bekommen, allerdings
verstehe ich noch nicht wie/wann ich diese Frequenz mit der
Zeitberechnung in Zusammenhang bringen muss um zum Schluss die drei
Halbbrücken richtig ansteuern zu können (Motor f=50Hz)...
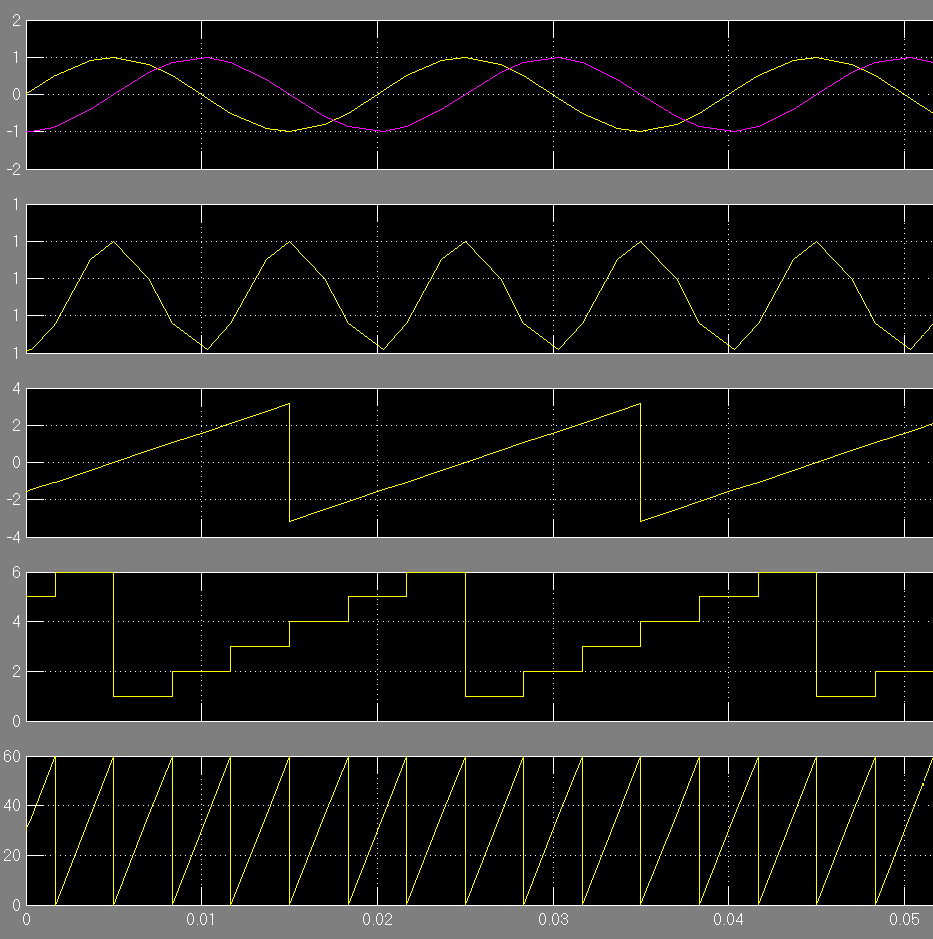
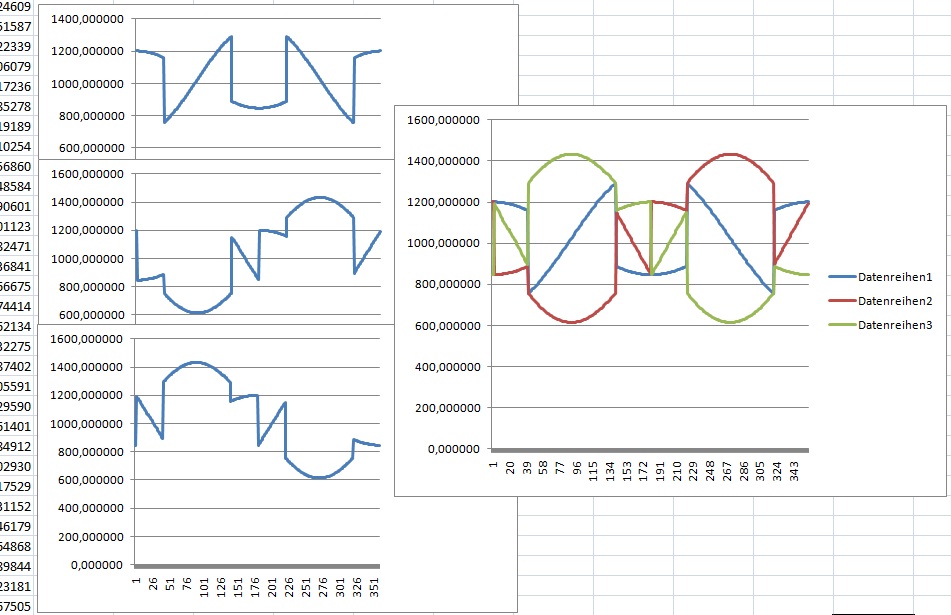
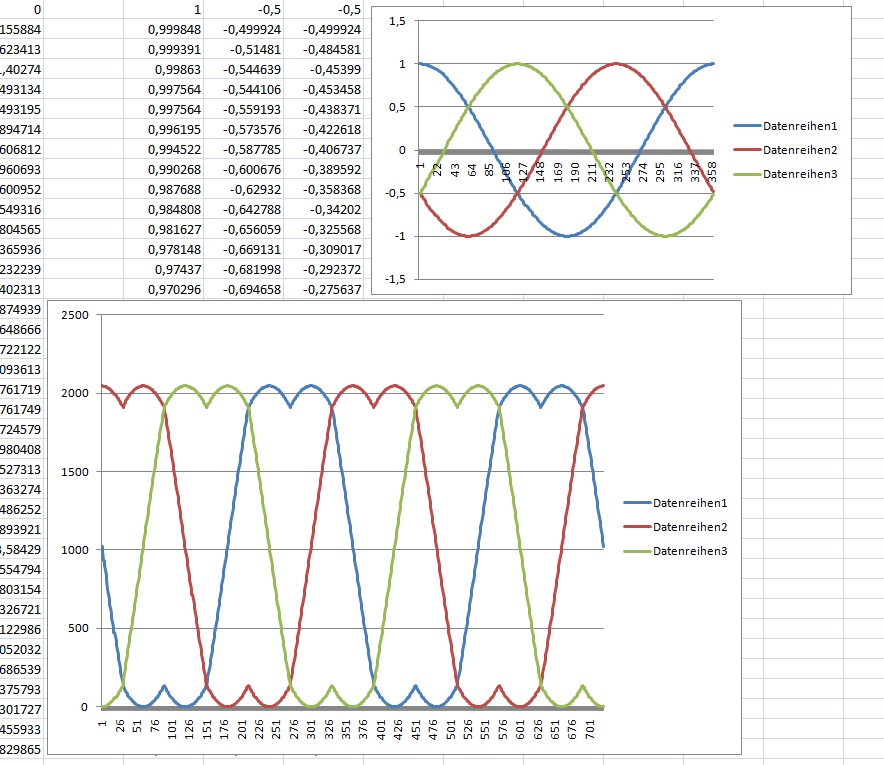
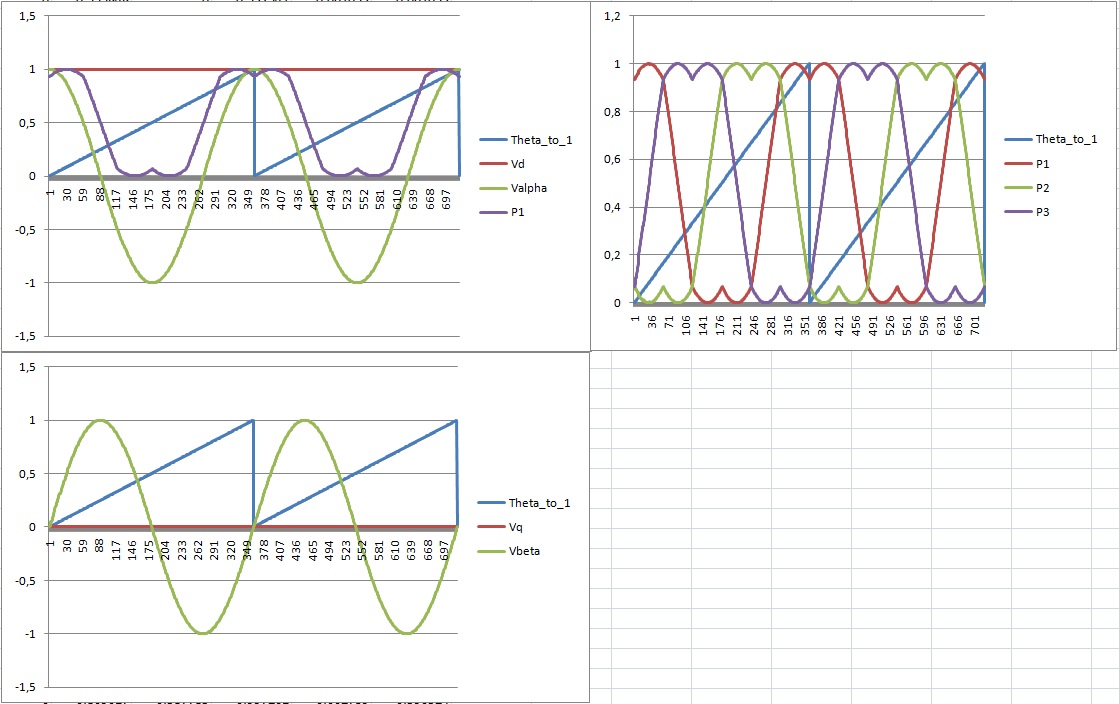
Bis jetzt bekomme ich wie im beigefügten Screenshot zu sehen ist (von
oben nach unten):
1. "apha und beta" -Signalverläufe nach er Inversen Parktransformation
2. den "Betrag des resultierenden Zeigers der sich aus alpha und beta
ergibt" in dem Fall ist er immer eins da die zwei Signale 90°
Phasenverschiebung zueinander haben und sich dann der
Quellen-Amplitudenwert, in diesem Fall 1, ergibt ODER liege ich da
falsch?!?
3. Winkel in rad des jeweiligen Sektors (natürich auch in deg verfügbar)
4. der "Sektor" des Zeigers, also von 1 bis 6
5. der Winkel im jeweiligen Sektor also von 0° bis 60°
Die Formeln für die Zeitenberechnungen wurden in diesem Thread am Datum:
17.12.2009 17:05 geschrieben, demnach müsste ich die Zeiten berechnen
können...aber was mache ich mit den drei Zeiten? Das wurde mir bis jetzt
durch alles was ich auf Wiki etc..gefunden habe noch nicht klar.
Falls sowas schon mal jemand in Matlab-Simulink implementiert hat wäre
cool... hab noch nichts gefunden bis jetzt was funktioniert hat bzw.
verständlich war für mich.
Eine Erklärung für Dumme wäre sehr hilfsreich :-)
Mit sehr sehr freundlichen Grüßen
Oder schau Dir mal das Buch hier an:
Vector Control of Three-Phase AC Machines: System Development in the
Practice (Power Systems) ISBN:3540790284
Der SVPWM Teil ist bei Google Books fast komplett
Gruß
@Ert & @Gonzo
D A N K E !
Jedoch kann ich mich noch nicht mit den Formeln auf Seite 11 von deinem
oben verlinkten pdf anfreunden da ich für T1 und T2 unterschiedliche
Zeiten bekomme wenn ich für einen Sektor mit 30° rechne.
Wenn mein resultierter Zeiger bei 270° ist, also ich für n = 5 und den
Winkel = 30° bzw. pi/6 wähle bekomme ich für T1= -1 und T2= 0,5 als
Ergebnis. Der vordere Therm ändert sich ja nicht da die
Gleichspannungsversorgung Vdc und die Periodenzeit Tz etc. gleich
bleiben und man ja zudem die Zeiten T1 und T2 zeitgleich berechnet.
Komisch finde ich auch dass in dem pdf von einem dq-System gesprochen
wird, das ist doch normal die gängige Bezeichnung der zwei Gleichgrößen
nach der Clarke&Park-Transformation. Die SVM beginnt bei euch doch
normalerweise auch mit alpha_beta welche man erst wieder durch die
Inverse-Park-Transformation erhält ?!?
Christian Zimmermann schrieb:> Die SVM beginnt bei euch doch> normalerweise auch mit alpha_beta welche man erst wieder durch die> Inverse-Park-Transformation erhält ?!?
Alpha & Beta erhält man nach der Inverse Clark aus d & q.
Mir hat dieses Seminar von TI ganz gut geholfen. FOC startet bei
~1:10:00
http://youtu.be/fpTvZlnrsP0
Hi Christian,
ich habe mir das Dokument jetzt nicht wirklich durchgelesen. Auf den
ersten Blick finde ich die Gleichungen aber nicht direkt für eine
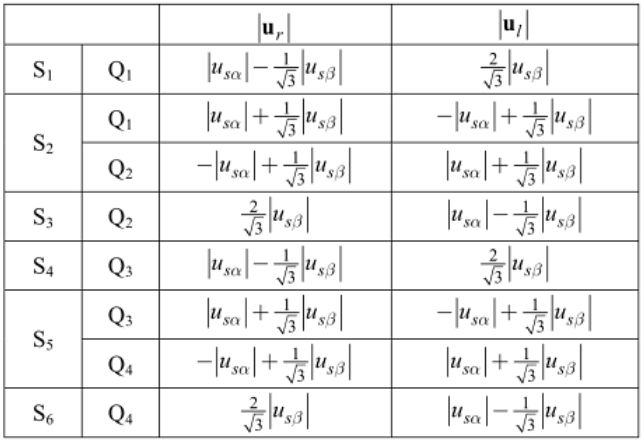
Implementierung tauglich. Zur Berechnung der Schaltzeiten T1, T2, T0
würde ich mir mal die Seite 25 in obigem Buch ansehen. Hier gibt es eine
Tabelle (siehe Anhang) die sich direkt für eine Implementierung eignet.
Im Grunde genommen lassen sich die ganzen Gleichungen einfach über
Dreiecksberechnungen ableiten. D.h. man zerlegt den Alpha/Beta Vektor
einfach in zwei Einzelzeiger die man dann geometrisch überlagert.
Warum in dem Dokument d/q Komponenten verwendet werden kann ich auch
nicht sagen. Im Pinzip kann hier ja jeder machen was er will. Ich kenne
eigentlich auch nur den Standard mit d/q-System => Rotorsystem und
Alpha/Beta-System => Statorsystem (bei PMSMs). Aus meiner Sicht ist es
also so wie du schreibst, d.h. aus d/q kommt man über die inverse Park
Transformation zum alpha/beta System und dann über die inverse Clarke
zum abc System.
Den letzten Schritt spart man sich normalerweise da man auch gleich aus
den Alpha/Beta-Komponenten die Schaltzeiten berechnen kann wie in der
Tabelle beschrieben.
@Michael: Dave Wilson ist echt klasse. Hier gibt es auch noch ein paar
Präsentationen und einen Blog zum Thema. Ist wirklich zu empfehlen!
Gruß...
Habe jetzt INA213 mit Low-Side Shunts. Die LTC6104 die ich vorher
probiert habe, haben beim einschalten der FETs 10V Spikes und mehr am
Output rausgegeben. Denke mal das ist nicht so gut für den ADC...
Gonzo schrieb:> Hier gibt es auch noch ein paar> Präsentationen und einen Blog zum Thema.
Fehlt "hier" was?
Michael schrieb:>> Hier gibt es auch noch ein paar>> Präsentationen und einen Blog zum Thema.>> Fehlt "hier" was?
Ist etwas blöd geschieben. War schon ein wenig müde gestern ;-). Ich
meinte auf der Seite von TI. Hier kann man einfach mal nach Dave Wilson
suchen und findet dann noch mehr Infos zum Thema Motor Control.
Guten Abend,
ich habe leider immer noch ein Problem mit meinem WinkelEstimator.
Solange ich den Winkel fest aufaddiere, funktioniert der Estimator
richtig, auch über einen großen Drehzahlbereich.
Wenn ich nun auf den errechneten Winkel umschalte, bleibt der Motor
stehen und es wird ein falscher Winkel berechnet.
Obwohl der Motor sich nicht dreht sondern nur noch unentschlossen
zittert,
berechnet der Estimator weiter irgendwelche Winkelwerte, dabei ist die
Winkelgeschwindigkeit sogar konstant!
Im Closed Loop wird der Referenzwert für 'q' nicht von dem PID Regler
für die Drehzahl vorgegeben, sondern einfach der selbe Wert wie in Open
Loop, der Einfachheit halber.
Ich weiß, dass schwierig ist, per Ferndiagnose so einen Fehler zu finden
und dass die Steuerung jeder etwas anders aufbaut,
aber vielleicht habt ihr einen Tipp, wo ich ungefähr den Fehler suchen
muss, wenn der Estimator aufhört richtig zu arbeiten sobald man auf den
errechneten Winkel umschaltet.
Edit: Falls es irgendeine Bedeutung hat: wenn ich den Rotor abnehme,
wird trotzdem ein Winkel estimated.
Grüße
Andreas
Moin.
Was meinst du mit Winkel umschalten?
Du fährst die Maschine mit einem vorgegebenen Winkel. Den du aus der
Integration einer vorgegebenen Drehzahl hast. Und Schaltest dann um auf
die Fluss berechnung und die Daraus resultierenden Werte?
Frage wie sieht dein Schätzer aus? Fluss, mit P Rückführung und dann
PLL? Ist das Einfachste und recht robust. Fehler der da gern auftritt
ist das vor dem Umschalten die integratoren der Pll nicht mit aktueller
Drehzahl und aktuellem Winkel gesetzt werden.
Einfachste Lösung ist die Pll zu Steuern beim Start.
Folgendes: du berechnest mit einem fixen Faktor eine
Winkelbeschleunigung aus dem vorgegebenen Iq (oder ohne Strom Regelung
Uq), und das gibste auf den PI regler der PLL.
Damit äauft die los bei ca. 100-200 rad/s schaltest du den Eingang der
PLL auf den Winkelfehler zwischen Fluss beobachter mit Tiefpass. (Hatte
ich weiter oben mal vorgeschlagen). Dann sollte das laufen mit dem
start.
Ich hab den Thread lange nicht verfolgt. Falls das nicht passt einfach
ignorieren.
Gruß
Tec
Hi Andreas,
Wenn ich dich richtig verstehe lässt du den Motor einfach gesteuert über
eine Drehzahlrampe hochlaufen, oder? Die Stromregler fütterst Du in der
Zeit mit festen Vorgaben ID=0 und IQ=irgendwas. Woher hast Du in dieser
Phase die korrekte Position? Wenn Du keinen Positionssensor nutzt stellt
sich in dieser Phase ja irgendetwas für d und q Strom ein. Das muss aber
nichts mit der Realität zu tun haben. Wenndu dann auf deinen
Winkelschätzer umschaltet gibt es dann ggf. einen Sprung in deinem
System und der Motor bleibt stehen.
Hast Su mal die Winkel aus der Vorgabe und von deinem Estimator
verglichen? Bist Du sicher das der Estimator richtig läuft, d.h. hast du
das Signal mal mit einem realen Positionssensor verglichen?
Gruß, Gonzo
Hallo,
vielleicht beschreibe meine Startvorgang.
Ich habe 3 PID Schleifen, eine für Iq, eine für Id und eine für
Drehzahlsteurung (W).
Die W Schleife bekommt als Input die gewünschte Drehzahl und die
aktuelle Drehzahl, die aus dem Delta Winkel und Zeit ermittelt wird.
Der Output dieser W-Schleife ist dann der Input für die Iq Schleife.
Mit PLL meinst du diese W-Schleife oder?
Ich fahre den Motor mit einem fest vorgegebenen Winkel hoch (Rampe),
dabei bleibt die W-Schleife vorerst aus. Der Winkel wird fest aufaddiert
und die Iq Regelschleife bekommt als Input vorerst einen konstanten
Wert, anstatt des Outputs der W-Schleife.
Zusätzlich gebe ich den fest aufaddierten Winkel und den vom Estimator
errechneten Winkel am Oszi aus.
Während des HochfahrVorgangs ist der errechnete Winkel dem fest
aufaddierten Winkel ziemlich identisch.
Nachdem der Motor die "Standgas-Drehzahl" erreicht hat, bekommen die
Clarke- und Parktransformationen und somit die
gesamte SVPWM Berechnung nicht mehr den aufaddierten Winkel sondern den
Winkel des Estimators.
Gleichzeitig wird die W-Schleife aktiviert. Als Referenz-Input bekommt
sie den aktuellen, mit LowPass gefilterten Omega-Wert damit weiterhin
die "Standgas-Drehzahl" gehalten wird.
Der Referenz-Input für die Iq Regelschleife bekommt nun nicht mehr einen
konstanten Wert, sondern den Output der W-Schleife.
Meine Regelschleifen sehen so aus (aus AN1078 nachgebaut):
1
voidCalcPI(void)
2
{
3
Err=InRef-InMeas
4
U=Sum+Kp*Err
5
if(U>Outmax)
6
Out=Outmax
7
elseif(U<Outmin)
8
Out=Outmin
9
else
10
Out=U
11
Exc=U-Out
12
Sum=Sum+Ki*Err-Kc*Exc
13
}
Laut AN1078 soll man die 'Sum' Variable des W-Reglers beim Umschalten
auf den Referenzwert des Iq Reglers setzen, um den von Gonzo erwähnten
Sprung zu vermeiden, das hilft aber leider auch nicht.
@Tec: Was meinst du mit: ".. schaltest du den Eingang der
PLL auf den Winkelfehler zwischen Fluss beobachter mit Tiefpass".
Soll ich den Referenzwert der W-Schleife auf den Winkelfehler zwischen
errechnetem und den aufaddierten Winkel setzen?
Den tatsächlichen Winkel weiß ich allerdings nicht, weil ich keinen
realen Positionssensor habe, aber die Abweichung sollte bei niedriger
Drehzahl ja nicht wirklich existieren oder?
Grüße
Andreas
Mit der PLL meine ich das du eine Winkel Regelschleife baust. Also
______________w
|
wt'--o--PI--Integrator----wt''
|- |
| |
------------------
wt' ist der winkel von deinem Estimator. Die Pll gegelt diesen quasi
aus. Das filtert den Winkel und sorgt für eine stetige drehzahlberechnug
w.
Andere Sache mal zu deinem Aufbau. Fahr doch mal mit konstanter Uq ohne
Regler. Dann kannst die Sprünge aus den Reglern ausschließen. Dann geht
es nur um deinen Winkelfehler den dein Estimator macht.
Was für ein Estimator wird in AN1078 verwendet?
Was mir im Moment noch nicht ganz klar ist, ist warum bei dir der
gesteuerte Winkel mit dem geschätzten in etwa übereinstimmen. Wenn Du
gesteuerte hochfährst wirst du gewöhnlich nicht den optimalen
Arbeitspunkt des Motors treffen. D.h. der q Srom den du mit dem
gesteuerten Winkel berechnet wird in der Realität eine Mischung aus d
und q sein. Wenn du dann zum Um schält Zeitpunkt den Drezahlregler mit
dem zuvor eingeprägten "q" Strom initialisiert hast du wahrscheinlich
trotzdem einen Sprung im System. Ich fahre eigentlich immer mit einem
recht hohen gesteuerten Strom hoch damit der Motor immer anläuft. D.h.
bei mir überwiegt der d-Strom oft.
Noch eine Frage:
Wie hast Du die Stromregler eingestellt? Laufen die beiden Regler
korrekt? Hast du überprüft das hier nichts schwingt?
Gruss ....
Den Motor ohne Regler zu steuern hat mich ein wenig weiter gebracht,
bzw. ein Erkenntnis.
Der verwendete Motor (alte HDD) hat einen Phasenwiderstand von 1.85Ohm,
dh es kann ein maximaler Strom von
12V/1.85Ohm = 6.5A fließen. Meine Shunts+OpAmp Beschaltung habe ich auf
1A ausgelegt.
Das heißt ich ich kann nur (1/6.5) des max. Stromes messen. Wenn ich
jetzt, egal ob mit oder ohne PID Regler
die Länge des d-q-Zeigers auf (1/6.5) = 0.15 limitiere, läuft der Motor
tatsächlich mit dem Winkel des Beobachters weiter, jedoch sehr schlecht,
auf dem Oszi kann man kaum erkennen dass es so ein Winkel sein soll.
Bei 0.16 Zeigerlänge dreht der sich nicht mehr.
Jedoch komme ich so kaum auf hohe Drehzahlen :(. Geschätzt unter
300umdr. und auch fast kein Drehmoment.
Setze ich einen kleineren Shunt (0.005 statt 0.05) ein, ist vermutlich
die Messung nicht mehr genau genug, denn der Motor läuft dann wieder
nicht.
Eigentlich sollte ja der Phasenwiderstand mit steigender Drehzahl sinken
und somit könnte ich den d-q Zeiger wieder länger
machen oder sehe ich das falsch?
Ich denke, mein geschätzter Winkel stimmt mit dem gesteuerten überein
weil ich schon während der Anfahrrampe
d und q Regler verwende.
Mit der Reglereinstellung habe ich viel gespielt, sollte jetzt eig.
passen. Werde ich mir morgen noch einmal ansehen.
Bin natürlich für weitere Tipps offen :)
Grüße,
Andreas
Nur am Rande. Ich habe gerade die AN11517 von NXP entdeckt und ein wenig
darin rum gestöbert:
http://www.lpcware.com/content/nxpfile/an11517-field-oriented-control-foc-pmsm-motor-using-lpc15xx
Der enthaltene Code ist recht minimalistisch, so dass man da schnell
einen Überblick erhält. Als zusätzliche Lektüre zum Thema sicherlich gut
geeignet.
Auch sonst ist der LPC15xx ein sehr interessanter Vertreter der M3's.
Insbesondere mit integrierter Band Gap und eeprom, was man nicht so
häufig antrifft. Ausserdem NXP-typische Treiber im ROM. Insgesamt ist
der Chip wie gemacht für SVPWM bzw. Motorcontroll.
Andreas True schrieb:> Ich denke, mein geschätzter Winkel stimmt mit dem gesteuerten überein> weil ich schon während der Anfahrrampe> d und q Regler verwende.
Das kann nicht sein. Du prägst mit der Regelung einen Stromvektor in den
Motor ein. Der wird dem wenn er kann folgen. Da dein Motor ohne Last
läuft wird der Flussvektor (normaler weise in Phase mit Id) fast genau
mit dem Stromvektor in Phase sein. Wie Gonzo schon geschriben hat.
Irgend was passt mit deinem berechnetem Winkel nicht. Ich würde erwarten
wenn du stuhr U_D so fährst das sich ca. 0,5A I_D einstellen. Und dann
den Winkel langsam hoch laufen lässt mit steugender Drehzahl bis du den
Motor schön schnell drehen hast. Dann lässt du ihn mit Konstanter
Drehzahl weiter laufen, rein gesteuert ohner Beobachter. Dann
vergleichst du den aktuellen gesteuerten Winkel mit dem geschätzen
Winkel. Jetzt sollte der Winkel des Beobachters deinem Gesteuerten
Winkel um ca. 1-10° nachlafen. Ohne Belastung der Maschine.
Wenn das nicht so ist bei wohl gemerkt Gesteuerter U_D nich U_Q dann
musst du deinen Beobachter überarbeiten bis das so ist.
Und dann kannst du darüber nachdenken bei Geregeltem I_Q deine Maschine
hochzufahren und umzuschalten.
Gruß
Tec
Hallo Tec,
vielen Dank für die ausführliche Beschreibung.
Ich habe es jetzt so ausprobiert, wie du es beschrieben hast:
- Nicht auf den berechneten Winkel umschalten, auf dem gesteuerten
bleiben
- U_d auf 0.3 konstant gesetzt, ohne PID Regler
Was sollte ich an dieser Stelle für U_q vorgeben?
Jetzt ist U_q = 0.
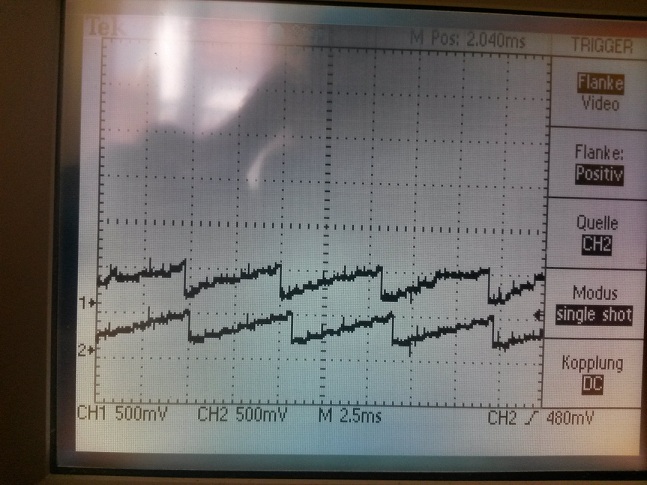
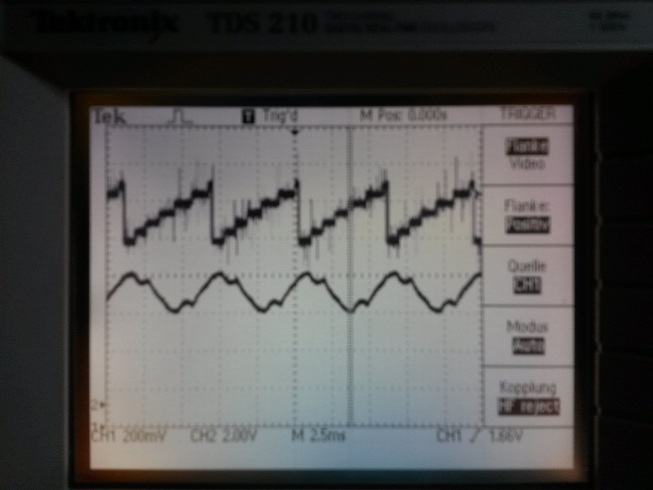
Wenn ich den Motor so steuere, ist die Winkelabweichung sehr gering,
schätze unter 10° (Beobachter eilt nach)
Dazu habe ich ein Foto angefügt. Unteres Signal zeigt den vorgegebenen,
gesteuerten Winkel, oberes den vom Beobachter.
Es wird quasi von 0-360-0-360-... dargestellt.
Wenn ich jetzt auf den Beobachter Winkel umschalte und die
PID Regler z.B folgendermaßen regeln lasse:
I_q = 0.2;
I_d = 0;
bleibt der Motor stehen. Wenn ich zusätzlich den beobachteten Winkel um
konstant 90° nach vorne shifte, dreht sich der Motor, jedoch ziemlich
langsam und ohne Drehmoment (wieder obere Situation).
Mittlerweile denke ich, dass es vllt. doch an den Reglerparametern
liegen könnte, denn ohne wird der Winkel ja scheinbar richtig berechnet.
Ich habe diese jeweils für q und d folgendermaßen eingestellt:
1
P=0.05;
2
I=0.01;
3
D=0.99999;
4
OutMax=0.99999;
5
OutMin=-OutMax;
Passt es so oder total daneben? (Regler werden mit 20kHz aufgerufen)
@Gast, AN11517: Kennst du die AN10889? Dort es auch sehr ähnlich und
sehr gut beschrieben.
Grüße,
Andreas
Moin,
So meinte ich das.
Sieht ja erst mal super aus. Du verwendest den Code der AN1078?
Hast du mal geprüft was für eine Ud und Uq deine Regler rausgeben? Vllt
ist die zu niedrig.
Anderer Test wäre mit Uq = 0.3 und Ud = 0.0 zu fahren. Wie zu anfang und
bei drehendem Motor auf den Beobachter Winkel umzuschalten. Der
Beobachter winkel sollte vor dem Umschalten um ca 90-80° voreilen. Weil
der Rotorfluss bei gesteuerten Drehen deinem Winkel folgt und so mit der
Q-Achse nach eilt wenn du Uq auf die Maschine gibst.
Anderer Test wäre bei Vorgegeben Iq/Uq einen negativen Id/Ud
einzustellen.
Es gibt Beobachterstrukturen die einen Id verschieden von null brauchen
um sauber mit niedrigen Drehzahlen zulaufen. Du drehst zwar schon schön
schnell aber vllt bringts was.
Andre Sache wäre deinen Gesteuerten Winkel und den Beobachteten
gewichtet zu mitteln.
1
wt_est// Beobachter Winkel
2
wt_ctr// Gesteuerter Winkel
3
g// Gewichtung
4
5
wt=wt_est*g+(1000-g)*wt_ctr
g bleibt erst mal auf 0 und dann wenn du umschaltest, dann
incrementierst du g alle ms um 1. Damit solltest du einen stetigen
Übergang der Systeme haben.
Gruß
Tec
Ich habe jetzt
U_q = 0.3
U_d = 0
eingestellt und der Beobachter eilt, wie du es gesagt hast um ca 90° vor
:)
Muss man bei dem gewichtetem Mittel nicht zusätzlich durch 1000 teilen?
1
wt=(wt_est*g+(1000-g)*wt_ctr)/1000;
Ich habe es jetzt mit 1000 probiert, also 1 Sekunde Übergangszeit und
auch mit 10000, also mit 10 Sekunden Übergangszeit . Damit ich am Anfang
der Übergangszeit quasi so gut wie nur mit dem gesteuerten Winkel fahre.
Trotz der 10 Sekunden bleibt der Motor sofort nach der Umschaltung
stehen.
Das deutet darauf hin, dass der PID Regler total falsch regelt oder?
EDIT: Wenn ich auf den Beobachter Winkel umschalte, aber weiterhin bei
meinen konstanten
U_q = 0.3
U_d = 0
bleibe, bleibt der Motor nicht sofort stehen sondern dreht immer
'schlechter', bis der Übergangszeit vorbei ist, dann bleibt er ebenfalls
stehen.
Grüße,
Andreas
Andreas True schrieb:> Muss man bei dem gewichtetem Mittel nicht zusätzlich durch 1000> teilen?wt = ( wt_est*g + (1000 - g)*wt_ctr ) / 1000;
Jop richtig erkannt.
Andreas True schrieb:> EDIT: Wenn ich auf den Beobachter Winkel umschalte, aber weiterhin bei> meinen konstanten> U_q = 0.3> U_d = 0> bleibe, bleibt der Motor nicht sofort stehen sondern dreht immer> 'schlechter', bis der Übergangszeit vorbei ist, dann bleibt er ebenfalls> stehen.
Das deutet darauf hin das dein Beobachterwinkel 90° versetzt ist.
Addiere mal
Pi/6 bis pi/3 bzw. 30-60° auf deinen Beobachterwinkel auf. Ist das
verhalten dann immer noch so?
Gruß
Tec
Leider ist das Verhalten immer noch so, mein Beobachter muss ziemlich
schlecht sein :D
Aber wenn man es rechnerisch betrachtet:
Dazu nehme ich Rotor vom Motor ab, es bleiben also nur die Spulen.
Beim Beobachter setzte ich den Slide Gain auf 1.
1)
Wenn man jetzt U_d = 0.3 und U_q auf 0.0 setzt muss die Abweichung
zwischen Beobachter Winkel und gesteuerter Winkel Null sein. (bzw.
minimal nachlaufen da keine ideale Spule)
2)
Bei U_d = 0.0 und U_q = 0.3 muss der beobachtete Winkel um 90° voreilen.
Sind diese Test ohne Rotor korrekt? Dann könnte ich den Beobachter
darauf trimmen.
Hatte heute leider keine Zeit das ordentlich einzustellen und
auszuprobieren.
Grüße,
Andreas
Hallo Andreas,
hast du bei deiner Inbetriebnahme des Beobachters auch schon mal den
geschätzen Strom mit dem gemessenen zusammen dargestellt? Die beiden
sollten eigentlich relativ über einander lieber. Hierzu gibt es auch ein
AppNote von Microchip das den Einstellprozess beschreibt. Der Winkel
muss auch nicht 100% stimmen. Wenn er nicht 100% passt schlägt sich das
erst mal im Wirkungsgrad nieder. Der Motor sollte aber trotzdem laufen.
Das könnte man dann aber z.B. auch noch quick and dirty über einen
Offsetwinkel korrigieren.
Den Stromregler kannst du über eine Sprungvorgabe prüfen, d.h. einfach
die Regler arbeiten lassen und den Winkel festhalten. Dabei dann einen
Sollsprung des d-Reglers vorgeben und gucken was der Motorstrom macht.
Damit kann man zumindest die d-Achse grob überprüfen. Wie hast Du die
Reglerparameter ermittelt? TN wird normalerweise auf die elektrische
Zeitkonstante eingestellt und KP sodass der Regler nicht so doll über
schwingt (Betragsoptimum).
Wie sieht eigentlich der Stromverlauf in der Anlaufphase aus? Der Anlauf
findet normalerweise mit einem recht hohen Strom statt. Wenn dann auf
den korrekten Winkel umgeschaltet wird fällt der Strom dann sehr stark
weil dann der Arbeitspunkt passt. Besonders im Leerlauf wird dann der
Strom sehr klein und die ADCs werden nur noch gering aus gesteuert.
Vielleicht ist das noch ein Problem bei dir?
Viele Grüsse
Hi,
ich habe meinen Beobachter überarbeitet, nun läuft der Motor mit dem
beobachteten Winkel :)
Wenn ich zu dem Winkel einen künstlichen Offsetwinkel addiere oder
subtrahiere, wird der Lauf schlechter, also nehme ich an, dass der
Winkel jetzt stimmt.
Die Tests, die Tec vorgeschlagen hat (U_q = 0.3, U_d = 0, ..) erfüllt
der Beochter auch.
Dieser Festplattenmotor hat leider keine Hallsensoren.
Die Regler über eine Sprungvorgabe habe ich noch nicht getestet, werde
es aber noch machen.
Ich habe die Regler jetzt erstmal soweit vereinfacht, dass es nur noch
P-Regler sind.
Für Parameter P habe ich den Wert 1.5 eingestellt. Wenn ich jetzt den
Phasenstrom betrachte (mit Scope direkt
an einem der Motoranschlüsse über LowPass Filter) sieht es schon
ziemlich sinusförmig aus, jedoch mit Ripple.
Problem dabei ist, dass der Motor ziemlich laute Geräusche von sich
gibt, nicht ein regelmäßiges Pfeifen, wie zB bei 1kHz PWM sondern
unregelmäßig. Liegt das an dem Ripple auf dem Oszi Bild? Bis jetzt habe
ich es nicht geschafft, die Kurve glatter zu machen.
Der Stromverlauf während der Anlaufphase sieht genau so aus, wie Gonzo
es beschrieben hat, sobald es auf den Beobachter umgeschaltet wird,
sinkt die Stromaufnahme.
Ich hätte noch eine Frage bezüglich der Parameter für inverse
Park-Transformation.
In AN1078 wird die Vektorlänge aus Vq und Vd (also die Pfeillänge aus
den Parametern für inverse park.) auf 0.95 limitiert mit der Begründung,
dass man genügen Zeit für die Strommessung übrig lässt. Dabei wird
zuerst
der V_d Anteil per PID Regler berechnet und dann wird per Pythagoras der
maximale Output Wert für den V_q Regler aus der Restlänge ermittelt.
Sprich V_q wird limitiert, V_d nicht.
In etwa so:
1
Vs=SQRT(Vd^2+Vq^2)<0.95
2
Vq=SQRT(0.95^2-Vd^2)
1) Braucht man hier wirklich so viel Zeit für die Messung?
2) Wenn ich diese Limitierung mitlaufen lasse, kann ich als Referenz für
I_q auch extrem hohe Werte einstellen,
diese werden von der Limitierung abgeschnitten. Somit bekomme ich für
V_q nicht besonders für raus -> Weniger Drehmoment.
Ist das wirklich so gewollt mit der Limitierung?
Grüße,
Andreas
Hallo Andreas,
das ist doch super wenn der Motor jetzt läuft!
Hast Du von deinem Motor schonmal die EMK aufgenommen? Ist die
sinusförmig oder auch verzerrt? Ggf. ist das die Ursache für deine
Stromform und auch dein Geräusch. Geräusche entstehen oft dadurch, dass
das Drehmoment nicht konstant ist, d.h. die Stromform passt nicht zur
EMK.
Zur Begrenzung:
Die ist schon wichtig wenn Du an die Auststeuergrenze des Umrichters
gehst. Du musst immer einen Nullzeiger haben damit Du die Motorströme
messen kannst. Wie groß dieses Zeitfenster sein muss hängt von deinen
Strommesskreisen ab, d.h. davon wie schnell die Schaltung am Ausgang,
bzw. am ADC Eingang, einschwingt. Auch hier würde ich mal einen Sprung
draufgeben und dann mal gucken was der Messverstärker macht. Da du in
der Mitte des Nullzeigers misst musst Du auch das berücksichtigen, d.h.
Einschwingzeit mal 2. Wie viel das dann in Prozent ist hängt natürlich
auch von der PWM Frequenz ab die Du einsetzt. Über diese Begrenzung
stellst Du im Endeffekt sicher, dass Du nicht die Schwingungen deines
Strommessverstärkers misst, sondern den realen Motorstrom.
Bei der Ansteuerung hast Du eigentlich zwei Begrenzungen:
Eine aus der SVPWM (=> Kreisbegrenzung auf cos 30°) und eine für die
Strommessung (im Beispiel 95%).
Viele Grüße...
Guten Abend,
ich habe mit den PID Reglern alles mögliche ausprobiert, leider ohne
Verbesserung. Ich denke die sollten passen, ich habe jetzt die Werte aus
der AN1078 übernommen. Die Strombegrenzung habe ich auf 95% eingestellt.
Die EMK ist sinusförmig.
Wenn ich den Motor nicht mit SVPWM sondern mit drei um 120° verschobenen
Sinuskurven ansteuere (sinusoidal drive?) und den Phasenstrom direkt am
Motor per Scope betrachte, sehe ich absolut perfekte Sinuskurven. Der
Motor läuft dabei absolut ohne Geräusche.
In der SVPWM dagegen hört man den Motor sogar pfeifen wenn man rein mit
dem vorgegebenen Winkel fährt, also noch bevor es auf den Beobachter
umgeschaltet wird.
Währenddessen fahre ich mit
U_q = 0.2;
U_d = 0;
Im Anhang ist ein Foto während der Motor mit einem vorgegebenen Winkel
und SVPWM läuft. Habt ihr eine Idee vorher dieser "Knick" bei 0° und bei
180° kommt? Auch wenn ich auf den Beobachter Winkel umschalte ist dieser
Knick da. Vielleicht kommen die Laufgeräusche daher?
EDIT: die Obere Kurve stellt den beobachteten Winkel dar, die untere den
Phasenstrom, gemessen direkt am Motor.
Grüße
Andreas
Moin,
Das der Strom nicht ganz Sinusförmig ist wenn du mit gesteuertem Winkel
fährst ist klar. Der Motor Lockt ja. (er kann dem Spannungsvektor
schneller folgen als du den Winkel incrementierst. Folglich holt der
Motor regelmäßig auf den Spannungsvektor auf und überschwingt. Daher die
Rippel auf dem Strom)
Ich vermute mal deine SVPWM ist nicht stetig. Prüfe bitte mal ob deine
SVPWM saubere POPO Kurven produziert. Und ob die Phasenrichtig sind. Ist
n Böser Fehler es gibt SVPWM implementierungen die ein 30° Offset haben,
bzw die alpha Achse (Alpha-Beta-System) nicht auf der A Achse
(ABC-System) liegt.
Gruß
Tec
Hallo Tec,
reicht es, einen Kreis mit dem Zeiger aus Valpha und Vbeta (also mit den
Input - Parametern der Inversen Clarke) abzufahren und den Ausgang der
Halbbrücken anzuschauen um die Popokurven zu überprüfen? (ohne Motor,
denn der würde ja die Popokurven glätten(?)).
Jetzt ist es bei mir so, dass der Sprung in der Sinuskurve (Foto letzter
Beitrag) auch ohne eines angeschlossenen Motors kommt, also muss der
Fehler wirklich in der SVPWM liegen :(
Grüße,
Andreas
Jap die Spannung kannst du auch ohne Maschine prüfen. 3 RC Kombi im
Stern an die dreiphasen und dann Phase gegen Gnd messen. Der mittelpunkt
sollte dabei gegen Gnd einen Dreieck fahren.
Kennst du den Thread über die SVPWM mit einem LPC musst mal im forum
suchen vllt findest da auch infos.
Hallo,
ich habe zwar den Strom noch nicht gemessen (bin noch nicht zu hause).
Dafür habe ich meine SVPWM mit
1
V_q=0.2
2
V_d=0.0;
gefüttert und den Winkel von 0 bis 2PI rotiert. Die Angefügten Kurven
sind dabei rausgekommen. (links die drei Phasen, rechts diese drei
übereinander gelegt)
Das sind quasi die Signale, die ich aktuell auf die PWM Duty lege.
Meine Vektorumrechnung muss wohl einen Fehler haben.
Gruß,
Andreas
Ich würde mal sagen du würfelst die Sektoren wild durch ein ander. Bzw
die Sektoren 2/3 und 4/5 sind invertiert. Prüf mal ob du die
Phasenreihenfolge nicht durch einander kriegst.
Tec, du hattest wie immer Recht :)
Ich hatte alle Vektoren invertiert.
Hier das Ergebnis, oben der Output der InverseClarke, unten die POPO
Kurven. U_q ist jetzt probeweise auf 1.0 gesetzt.
Vielen Dank!
Jetzt setze ich das ganze mal in den uC und mal schauen was der Motor
dazu sagt.
Gruß
Andreas
Bei dem letzten von mir geposteten Diagramm beginnt keine der drei
Phasen bei Theta = 0. Hast du das mit "30° Offset" gemeint?
Würde ich diesem Offset dann nicht zwangsweise im Beobachter
dazuaddieren müssen?
Ich habe die Vektorumrechnung so abgeändert, dass nun eine der Phasen
bei Theta = 0 anfängt. (siehe Anhang)
Der Beobachter erfüllt die Tests, die du weiter oben vorgeschlagen hast
immer noch.
Mit gesteuertem Winkel läuft der Motor perfekt, auch die Spannungskurven
direkt am Motor gemessen sehen top aus.
Mit Beobachter Winkel Winkel und PID Regler läuft er auch, aber noch
nicht so gut.
Gruß
Andreas
Moin,
Bei dir ist p1 genau im maximum bei theta 0. Also super. Wenn an dem
punkt alpha auch max ist und beta 0. Dann ists phasen richtig. Wenn
spannung und strom nicht phasen richtig sind dann stimmt die beobachter
Gleichung ja nicht.
Hast du filter in der Strommessung? Die erzeugen dir ja einen phasen
fehler beim strom. Weshalb dann auch hier die beobachter gl. Nicht
korrekt ist der fehler sollte aber soklein sein das der beobachter nicht
gleich glaubt die maschine dreht rückwärts. ( was du in vollem lauf
hättest wenn du phasen fehler nicht vorher schon ausmerzt. Stichwort
Singularität von sin/cos).
Jap, ich habe zwei Lowpassfilter, welche laut AppNote zusammen eine 90°
Verschiebung ergeben.
Was ich bei der SVPWM, unabhängig vom Beochbachter noch nicht ganz
verstehe ist Folgendes:
Das Programm läuft ja Folgendermaßen ab:
Phasenströme messen -> Clarke -> Park -> (PID Regler) -> Inverse Park ->
Inverse Clarke -> SVM -> Duty Zeiten Setzen.
Alpha und Beta ergeben sich ja aus der Messung der Ströme. Diese werden
wiederum von der letzten Iteration bestimmt, also SVM(n-1).
Mit der SVM lege ich die Spannung fest. Der Strom eilt der festgelegten
Spannung um 90° nach.
Wenn man das jetzt auf mein oberes POPO Kurvendiagramm anwendet:
p1 (also der Wert, den ich auf Duty lege) ist bei Theta = 0 maximal.
Damit die SVPWM phasenrichtig ist, muss gültig sein:
(Alpha = max && p1 = max && Theta = 0)
-> ist sowas möglich oder habe ich es falsch verstanden? Strom eilt ja
bei Spule trotzdem immer nach.
Ich hätte gemeint, dass folgendes richtig wäre:
( Alpha(n+1) = max ) && ( p1(n) = max ) && ( Theta(n) == 0 )
Also dass Alpha erst beim nächsten Durchlauf der jetzigen p1
phasengleich wird.
(mit n meine ich die Anzahl der Programmdurchläufe)
Grüße,
Andreas
Andreas True schrieb:> Jap, ich habe zwei Lowpassfilter, welche laut AppNote zusammen eine 90°> Verschiebung ergeben.
Bei welcher Drehfrequenz?
Andreas True schrieb:> Damit die SVPWM phasenrichtig ist, muss gültig sein:> (Alpha = max && p1 = max && Theta = 0)> -> ist sowas möglich oder habe ich es falsch verstanden? Strom eilt ja> bei Spule trotzdem immer nach.
Richtig. Wir reden hier nur von der Spannung.
Was ich meine Du regelst Id/Iq für einen Strom dessen Transformation
abc/dq darauf bassiert das für theta = 0 id in Phase mit Ia ist. Dann
muss das Zwingend auch für die Spannungen der SVPWM so sein. Sonst ist
den Modell Ja falsch. Denn alle beruht genau darauf.
Außerdem empfinde ich die 90° Phasen Lag durch deine Filter als sehr
hoch.
Zumal das ja arg(R+1/(jwC)) ist also Drehzahl abhängig.
Durch denk das noch mal genau.
Omega wird dabei alle 'SPEEDLOOPTIME' aus dem aufaddierten Theta
ermittelt.
Wobei ich das ehrlich gesagt noch nicht verstanden habe.
Zu SVPWM:
Nur nochmal zur Sicherheit:
Es gilt:
1)Ich fahre mit vorgegebenem Winkel
2)jetzt gerade (n=1) ist Theta = 0.
Ich messe die Ströme. Diese müssen soweit verschoben sein, dass in
diesem Moment (n=1) Alpha = max sich aus den gemessenen Strömen ergibt.
Nun berechne ich die SVM. Diese muss mir (immer noch n=1) für p1 = max
ausspucken. Das schicke ich dann auf die PWM Duty.
Also schickt man die Spannung um 90° nacheilend in den Motor? Bzw. man
schickt die Spannung phasengleich zum gemessen Strom, immer noch bei
(n=1)
Ich nerve bestimmt schon mit meinen Fragen :/
Hallo Tec & Andreas,
ich glaube ihr redet von unterschiedlichen Filtern. In der AppNote gibt
es zwei Tiefpassfilter innerhalb des Sliding Mode Observers. Diese TP
Filter werden entsprechend der Drehzahl nachgeführt sodass sich immer
90° Phasenverschiebung ergeben.
Ich denke Du, Tec, meinst TP Filter direkt in der Strommessung des
Motors, d.h. außerhalb des Beobachters, oder?
Wann rechnest Du eigentlich deinen Beobachter? Das geht aus deinem
Ablauf oben nicht hervor. Normalerweise sollte der Ablauf wie folgt
sein:
1. Strom messen
2. Clarke
3. Beobachter rechnen um aktuelle Winkel zu haben
4. Park
5. PI-Regler für die Ströme
6. inv. Park
7. SVPWM
Ist das so bei Dir, Andreas?
Dann noch was. In den Beobachter fließt ja auch die Ausgegebene Spannung
Richtung Motor ein. Hier muss man beachten, dass man hier die richtigen
Spannungen verwendet da sich aufgrund der meist verwendeten gepufferten
Ausgabe meist eine Verschiebung um einen Reglertakt ergibt.
Was Du hier probieren kannst ist, einfach mal einen Offset einzurechenen
und diesen dann im Motorlauf mal zu verändern. Ggf. kannst Du damit den
optimalen Winkel finden.
Noch eine Sache ist die Abtastfrequenz des Reglers. Wenn ich es oben
richtig sehe rechnest Du nur 5-6 mal pro elektrischer Periode.
Entspricht das auch deiner PWM Frequenz, d.h. rechnest Du in jedem PWM
Takt oder nur jedes n-te mal? Ggf. solltest Du etwas häufiger rechnen.
Gruß,
Gonzo
Hallo Gonzo,
den Beobachter rechne ich gleich nach der Strommessung. Da man bei
Clarke den Winkel noch nicht braucht, kann man sagen dass es deiner
oberen Liste entspricht :)
Edit: hier lag ich falsch->Clarke muss man vor dem Beobachter rechnen,
denn dieser braucht die Ergebnisse der Clarke.
Die d und q Regler rechne ich jeden PWM Zyklus. Das mit dem Offset im
Beobachter werde ich auf jeden Fall ausprobieren. Zuerst möchte ich
SVPWM an sich richtig und phasenkorrekt einstellen.
Übrigens: mit dem HDD Motor brauche ich 6 elektrische 0-360 Durchläufe
für eine Umdrehung. Wenn ich das hochrechne, schaffe ich dem Motor ohne
Platten 20kRPM mit vorgegebenem Winkel :D
Gruß
Andreas
Hallo Zusammen,
@Gonzo: Du hattest recht ich meine Filter im Strom Pfad. An die BEMF
Filter des Beobachters der AN1078.
@Andreas: Deine SVPWM würde ich erst mal so lassen. Wie es aus sieht
braucht dein Beobachter eine gewisse drehfrequenz damit der vernönftig
läuft auch wegen der Filter. Außerdem ist das Phasengang ja recht fix
bei 90° mit der w-Kompensation. Ich würde folgendes Probieren. Maschine
OpenLoop hoch drehen auf sagen wir 200rad/s = w, dann auf den Beobachter
umschalten. Jetzt würde ich mir irgend einen Kanal suchen mit dem du
einen Offsetwinkel im Lauf ändern kannst.
Tip: Bei ST-Link und STM32 sieh dir STMStudio an damit kannst du
Variablen im lauf manipulieren. Oder so tools wie FreeMaster (braucht
aber ne gegenstelle im Controller und ist von FreeScale, zwar frei soll
aber laut lizenz nur auf FreeScale Controller eingesetzt werden. Hobby
mäßig kräht da aber bestimmt eh keiner nach. )
Gruß
Tec
Guten Abend.
Achso, nein, ich habe noch keine Filter im Strompfad.
Zur Zeit verändere ich meine Variablen, wie zb den Winkeloffset während
der Laufzeit mit ein paar Tastern, mit denen ich dann + und - rechne.
Vielen Dank für den Tipp mit STMStudio:
Tecnologic schrieb:> Bei dir ist p1 genau im maximum bei theta 0. Also super. Wenn an dem> punkt alpha auch max ist und beta 0. Dann ists phasen richtig.
Welches Alpha und Beta beziehst du dich hier?
Ich habe ja zwei davon:
1. Erhalte ich ein Ialpha und Ibeta nach der ClarkeTransformation aus
den gemessenen Strömen.
2. Valpha und Vbeta nach Inverse Park Transformation.
Allerdings wird ja Valpha = max und Vbeta = 0 bei Theta = 0 nur wenn man
U_d != 0 und U_q == 0 eingestellt hat, sonst nie, da iniverse Park:
1
Valpha=Vd*cos_angle-m1.Vq*sin_angle;
2
Vbeta=Vd*sin_angle+m1.Vq*cos_angle;
Ich will meine SVPWM richtig einstellen, wie alle anderen :D, auch wenn
meine jetzt so scheinbar läuft, hätte ich es ganz gerne richtig rum ;)
Gruß
Andreas
Andreas True schrieb:> Allerdings wird ja Valpha = max und Vbeta = 0 bei Theta = 0 nur wenn man> U_d != 0 und U_q == 0 eingestellt hat, sonst nie, da iniverse Park:
Genau das ist der Punkt. Wenn bei Theta = 0 und Vq = 0 und Vd = 1 gilt
Valpha = Vd = Va =1, Vbeta = Vq = 0, Vb und Vc ergeben sich dann.
Für Theta = 0 liegen alle Koordinatensystem über einander. Vd-Achse auf
Valpha-Achse und auf der Va-Achse. Für Theta pi/2 bzw. 90° muss dann Vd
mit Vbeta gleich sein und Vq = -Valpha.
Wenn diese Bedingungen passen sollte die SVPWM phasenrichtig sein und
sich auch in die richtige Richtung drehen. Wenn dann deine
Stromtransformationen genauso richtig sind also das gleiche gilt. Dann
ist die Basis sauber. Dann kannst du dich in Ruhe um die Eigenheiten des
Beobachters wie die 90°Phase kümmern.
Du suchst sonst immer beim Beobachter dabei sinds Grundlagen die nicht
passen. Da fallen auch gestandene Umrichter Entwickler drauf rein.
Also Thumbs up fürs saubere Prüfen der Transformationen.
Gruß
Tec
Tec Nologic schrieb:> Genau das ist der Punkt. Wenn bei Theta = 0 und Vq = 0 und Vd = 1 gilt> Valpha = Vd = Va =1, Vbeta = Vq = 0, Vb und Vc ergeben sich dann.>> Für Theta = 0 liegen alle Koordinatensystem über einander. Vd-Achse auf> Valpha-Achse und auf der Va-Achse. Für Theta pi/2 bzw. 90° muss dann Vd> mit Vbeta gleich sein und Vq = -Valpha.
vielen Dank für die Zusammenfassung (y)
Dann waren meine Transformationen richtig :)
Das einzige was mich jetzt dabei noch stutzig macht:
Tec Nologic schrieb:> Für Theta pi/2 bzw. 90° muss dann Vd> mit Vbeta gleich sein und Vq = -Valpha
sieht bei mir so aus:
Theta| Vd| Vq| Valpha| Vbeta| P1| P2| P3|
90| 1| 0| 0| 1|0,5| 0| 1|
Vq = -Valpha, sind aber beide 0, da Vq durchgehend auf Null ist. Dreht
sich meine Transformation in die falsche Richtung?
Ich habe jetzt die nun korrekte svpwm in meine Motorsteuerung
übernommen. Habe dafür leider auch den Beobachter wieder umschreiben
müssen.
Aber nun erfüllt er wieder die Tests von Tec. Vorerst aber noch ein
wenig quick&dirty mit einem künstlichen Offset. So dass der beobachtete
Winkel bei U_d = 0 und U_q = 0.3 um fast 90° voreilt.
Sobald ich aber auf den Beobachter Winkel umschalte blockiert der Motor
sofort :(
Etwas anderes:
Jemand von euch hat mir ja zusätzlich diesen Link vorgeschlagen:
https://b94be14129454da9cf7f056f5f8b89a9b17da0be.googledrive.com/host/0B0ZbiLZrqVa6Y2d3UjFVWDhNZms/motordrive/sensorless_gen1_Rev1.pdf
auf der Seite 60 unten schreibt er:
"Multirotor motor controllers are typically “speed” controllers. (They
control PWM duty cycle, which sets the average voltage. Ignoring the
voltage drop across the motor’s resistance and assuming proper timing,
this correlates to the back EMF, which is a function of rotor speed.)
Field-oriented control is fundamentally a current control strategy. A
speed control outer loop must be applied to make it compatible with
standard flight controllers."
Wieso braucht man unbedingt einen Regler für omega, welcher dann den
Sollwert für den q-Regler vorgibt?
Kann, wie in seinem Beispiel, die zentrale Quadcopter Regelung nicht
direkt den Sollwert für den q-Regler vorgeben?
Gruß
Andreas
Dann müsstest du halt alle Messwerte mit deiner Reglerfrequenz vom
Regler zum zentralen Regler übertragen und genauso schnell zurück.
Außerdem kann das m.W.n. keine Standard Quadrocopter-Regelung. Diese
müsstest du auch selber bauen. Dann ist es wohl einfacher direkt im
Regler des Motor auf die Soll-Drehzahl zu regeln.
Viele Grüße Michael
Andreas True schrieb:> Wieso braucht man unbedingt einen Regler für omega, welcher dann den> Sollwert für den q-Regler vorgibt?
Überleg dir einfach wenn du den Iq konstant einregelst. Und der Motor
beschleunigt wird die BEMF größer. Damit muss der Regler die Vq erhöhen
um die BEMF zu kompensieren. Und das macht der dämliche BLDC-ESC nicht.
der gibt quasi stuhr Vq = Duty und Vd = 0 vor. Und dann kommen die
Spinner mit ihrem geilen Timing und geben noch n bischen Vd negativ vor.
Um die Induktivität zu Kompensieren.
Mit FOC bist du da viel besser beraten. Ind nur nicht so simpel.
Einfachste Möglichkeit wäre Stuhr Vq vorgeben und Id zu 0 regeln. Wäre
mal interessant das zu Probieren. Oder du baust n Drehzahlregler der Iq
vor gibt.
Das hat den scharm das du viel dynamischer bist als n normaler BLDC-ESC.
Du kannst ja zum Bremsen auch negativen Strom vorgeben. USW.
Gruß
Tec
Guten Abend,
so langsam verzweifle ich an der sensorlosen FOC :/
In Openloop liefert der Beobachter ordentliche Werte, doch sobald es auf
auf Closedloop umgeschaltet wird ists vorbei.
Könnt ihr mir vielleicht einen kleinen Motor mit einem integrierten
Winkeldecoder empfehlen? Am besten einen, bei dem ich den Winkel über
irgendeine Kommunikationsschnittstelle direkt auslesen kann (SPI, I2C,
...) oder eine bestimmte Anzahl von Ticks pro Umdrehung erhalte, so dass
ich diese dann aufaddieren kann. Ich finde nichts passendes und für
einen Studenten bezahlbares.
@Tec: nochmal vielen Dank für den Tipp mit STM Studio, es erleichtert
die Arbeit wirklich ungemein :)
Grüße
Andreas
Moin.
Nimm einen Festplattenmotor mit HallSensoren da hast du alle 60° ne
genaue Position. Damit kannst du deinen berechneten Winkel abgleichen.
Siehe auch Paper von Shane Colton. Das ist wohl das günstigste. Hast du
mal mit einem Winkel Offset rumgespielt?
Jup, bin mit Offset von -2.5Pi bis +2.5Pi mit 10Grad Schritten
durchgegangen mit dem Ergebnis dass an manchen Stellen der Motor
komplett blockiert und an anderen kommutiert die Steuerung vor sich hin
mit zb 10000Pi / sekunde. Da wackelt der Rotor natürlich nur noch an der
Stelle.
Gruß
Andreas
Das hört sich danach an das der Beobachter glaubt der Antrieb sei
schneller. Hast du mit Rs und Ls gespielt? Deine Parameter sind
wahrscheinlich falsch. Lass mal Rs in ruhe. Fahre Obenloop und spiel mal
mit Ls rum. und sieh dir das verhalten an. Und dann guckmal das dein
Beobachter deinem Winkel leicht hinterher eilt. Und denk an die 90°
Phase die der Beobachter eh schon hat.
Hallo Tec,
Tec Nologic schrieb:> denk an die 90°> Phase die der Beobachter eh schon hat
Diese 90° sind aber in den Voraussetzungen:
1)
V_q = 0.3 und V_d = 0 => eilt Beobachter Winkel um 80°-90° vor
2)
V_q = 0 und V_d = 0.3 => Beobachter Winkel = vorgegebener Winkel
schon mit eingerechnet oder? Wenn die Voraussetzungen erfüllt sind,
stimmt dann die Beobachtergleichung?
Verstehe ich das richtig, dass mein Beobachter mit vorgegebenem Winkel
scheinbar "perfekt" läuft, auch mit falschen Parametern, weil ich den
Motor sozusagen zwangsbestrome?
Den Widerstand und die Induktivität habe ich mit einem recht teueren
Gerät gemessen: R = 1.925[Ohm] und L = 0.000449[H]. Habe aber daran
viel rumprobiert und tatsächlich eine Konfiguration gefunden mit der der
Motor sehr gut mit dem Beobachter Winkel läuft, allerdings nur mit
folgenden Einstellungen:
R = 1.925;
L = 0.005; // um Faktor 1000 mehr!
dazu muss ich den maximalen und minimalen Ausgabewert der D_PID Schleife
auf +0.01 und -0.01 setzten, sprich d wird so gut wie nicht
nachgeregelt.
max_output Q_PID = 0.2;
min_output Q_PID = -0.2;
So läuft der Motor wirklich sehr schön, allerdings schlagen die q und d
Regler an die unteren output Grenzen, also ständig:
pid_q.out = -0.2;
pid_d.out = -0.01;
So lässt sich das Drehmoment nicht Regeln, sobald ich die Grenze für
Q-PID.output größer mache, wandert der Regler sofort wieder an den neuen
Anschlag.
Viele Grüße
Andreas
Andreas True schrieb:> Diese 90° sind aber in den Voraussetzungen:> 1)> V_q = 0.3 und V_d = 0 => eilt Beobachter Winkel um 80°-90° vor> 2)> V_q = 0 und V_d = 0.3 => Beobachter Winkel = vorgegebener Winkel>> schon mit eingerechnet oder? Wenn die Voraussetzungen erfüllt sind,> stimmt dann die Beobachtergleichung?
Moin,
Sowie ich den Beobachter verstehe hängt er durch die beiden TPs immer
90° hinter her. Soll heißen Vd = 1 und Vq = 0 ohne +90° auf dem Winkel
(bei w positiv) müsste bedeuten Vq = -1 und Vd = 0 für die Maschine.
Also Grundsätzlich alles was aus dem Beobachter kommt +90° bei positiver
Drehrichtung und -90° bei neg Drehrichtung.
Andreas True schrieb:> Den Widerstand und die Induktivität habe ich mit einem recht teueren> Gerät gemessen: R = 1.925[Ohm] und L = 0.000449[H]. Habe aber daran> viel rumprobiert und tatsächlich eine Konfiguration gefunden mit der der> Motor sehr gut mit dem Beobachter Winkel läuft, allerdings nur mit> folgenden Einstellungen:>> R = 1.925;> L = 0.005; // um Faktor 1000 mehr!
Hast du mal mit dem K Faktor des SMO gespielt. Ein hohes L deutet auf
eine zu niedrig angesetzt BEMF. Also deine geschätzte Bemf ist zu
niedrig.
Wie fährst du die Maschine an? Mit Vd != 0 und Vq = 0? und dann
umschalten oder mit geregeltem Iq ??
Mach bitte mal Folgendes. Iq auf einem guten Wert einregeln. Auf ca. w=
100/s Openloop beschleunigen. (Iq muss so groß sein das der Motor
mühelos folgen kann!!!!, also bei dir min 0.5A besser 1A, das der in
jedem Fall im lockenden Betrieb ist und der Fluss in Phase mit dem Strom
ist.)
Jetzt muss der Beobachter Winkel exakt 90° nach eilen. und zwar genau
nach eilen. Nicht voreilen (180° also Vorzeichenfehler), Nicht 180°
nacheilen dann ist den 90° Offset in die Falscherichtung. Und dann mit
einem Poti langsam die Gewichtung auf den Beobachterwinkel fahren.
bis das sauber geht.
Gruß
Tec
Mit dem K Faktor habe ich ich noch nicht gespielt, werde es gleich
probieren.
Die Maschine fahre ich mit V_d = 0.3; V_q = 0 damit ich beim Umschalten
auf Openloop keinen Winkelsprung machen muss.
Tec Nologic schrieb:> Iq auf einem guten Wert einregeln. Auf ca. w=> 100/s Openloop beschleunigen. (Iq muss so groß sein das der Motor> mühelos folgen kann!!!!, also bei dir min 0.5A besser 1A, das der in> jedem Fall im lockenden Betrieb ist und der Fluss in Phase mit dem Strom> ist.)
Soll ich währenddessen Id auf Null regeln oder einfach V_d = 0 setzten?
Wenn ich Iq = 0.5 und Id = 0 regeln lasse, mit gesteuertem Winkel, gibt
der D-Regler ständig den maximalen Wert, also 1 aus. Somit zieht der
Motor extrem viel Strom und der Beobachter läuft gar nicht mehr.
(Wahrscheinlich weil bei so viel Überstrom die OpAmp Beschaltung nicht
mehr passt)
EDIT: gerade die Regler Parameter etwas abgeändert, jetzt läuft der
D-Regler nicht mehr ständig an die Grenze und der Motor zieht auch nicht
mehr so viel Strom.
Grüße
Andreas
Moin,
Fahr den Motor so hoch wie du ihn auch Fahren willst. Also Iq = x und Id
= 0 eingeregelt. Und mache für den Anfang die Regler ruhig etwas träge
(wenig P Verstärkung). Dann sind sie robuster.
Das mit dem auf den beobachter umschalten über Zeit haben wir ja schon
mal besprochen, das würde ich erstmal auch so machen.
Du hast nicht zufällig Matlab zur Verfügung? Ich persönlich Simuliere
das
gern vorher. Das ersparrt das Debugging am Motor.
Kennst du das Ke oder Kt des Motors? Bzw. die Amplitude der Bemf bei
1000rpm oder so? Dann könnte man über Prüfen ob dein Beobachter die BEMF
richtig schätzt.
So wie ich das Problem einschätze. Wird die Amplitude der BEMF zu
niedrig geschätzt. Bzw es wird ein Teil der BEMF der drehzahlabhängigen
Spannung über der Spule zu geordnet.
Also Rs und Ls auf realen Wert. Und dir die e_alpha und e_betas ansehen.
Vllt auch e +z. Das Setzt der SMC ja als Bemf an.
K muss hier dann so gewählt werden das die BEMF amplitudenmäßig mit der
realen passt. Dann läuft der Motor auch.
Selbst n unscented Kalman Filter mit Drehmomentschätzung usw. läuft
nicht sauber wenn Ke daneben ist. Rs und Ls sind dem z.B. ziemlich egal,
aber Ke muss passend sein.
Gruß
Tec
Hallo,
vielen Dank für die Tipps, werde versuchen, diese umzusetzen. Ohne jetzt
den unscented Kalman Filter zu kennen, ist dieser anders aufgebaut als
der Beobachter in der AN1078?
Ich habe heute n altes Thema (2011 oder so) gefunden, in dem du
geschrieben hast dass du gerade dabei bist die AN1078 umzusetzen und
dann die FOC Steuerung in einen Quadcopter einzubauen. Hast du das
Projekt zu Ende realisiert, bzw. hast du die FOC genauso wie in AN1078
umgesetzt?
Ich bin auch durch Quadrocopter auf das FOC Thema gekommen :)
Grüße
Andreas
Michael Mayer schrieb:> Andreas True schrieb:>> Ich bin auch durch Quadrocopter auf das FOC Thema gekommen :)>> Da sind wir dann schon zu dritt ;)
Ein kleines Motivationsvideo zwischen durch:
http://vimeo.com/57710874
Andreas True schrieb:> Ich habe heute n altes Thema (2011 oder so) gefunden, in dem du> geschrieben hast dass du gerade dabei bist die AN1078 umzusetzen und> dann die FOC Steuerung in einen Quadcopter einzubauen.
So lange ist das schon her :) Das lustige ist das ist mittlerweile viel
mehr geworden :). Im Moment dreht sich meine Masterthesis um Beobachter
für PMSM/BLDC Maschinen.
Was AN1078 angeht. Habe ich den PIC schnell verworfen. Und bin beim STM
gelandet. Programmiert sich einfach besser.
Was mich an AN1078 immer gestört hat. Ist der Anlauf. Du hast dieses
Problem jetzt auch. Du musst bei dem SMO/SMC K, Rs und Ls immer auf den
Antrieb und die Applikation Abstimmen. Und vorallem musst du den Anlauf
für jede Konfiguration von neuem Robust machen. Mich hats genervt.
Das Problem haben aber alle BEMF basierten Beobachter. Dann kommen noch
Probleme mit der Strommessung dazu dann brauchst du noch ne PLL die
ripple auf Theta raus glättet. Man kann da viel machen.
Ich verfolge mittlerweile den Ansatz. Aus dem Stand anzufahren immer mit
Beobachter. Oder bei angetriebener drehender Maschine den Umrichter
einschalten, und gleich ein Bremsdrehmoment einregeln. (Nutze ich als
Lastmaschine).
Bei sowas ist so ein Modellbasiertes Filter wie ein Kalman Filter sehr
hilfreich. (Die werden meist auch bei Coptern für die Lagebestimmung
benutzt.)
Gruß
Tec
Tec Nologic schrieb:> Du musst bei dem SMO/SMC K, Rs und Ls immer auf den Antrieb und die> Applikation Abstimmen
..
Tec Nologic schrieb:> Aus dem Stand anzufahren immer mit Beobachter
Das hört sich wirklich spannend an! Habe dazu ein wenig gelesen.
Basiert es auf diese Ausarbeitung?:
Terzic, B. & Jadric, M., 2001. Design and Implementation of the Extended
Kalman Filter
http://scindeks.ceon.rs/article.aspx?query=ISSID%26and%2611541&page=3&sort=8&stype=0&backurl=%2Fissue.aspx%3Fissue%3D11541
Kannst du dann wirklich aus dem Stand, auch ohne motor auf 0 grad
einrasten zu lassen, und auch ohne Motordaten L und R, mit korrektem
Winkel anfahren?
Der Kalman Filter benötigt ja auch eine gewisse "erfahrung" während der
Motorlaufzeit um sicher zu werden.
Sind aber nur überlegungen, ich sollte wohl erstmat die
An1078 zum laufen bringen. Aber ein bisschen informieren schadet ja
nicht :)
Sorry für die Rechtschreibung, schreibe mit smartphone
Grüsse
Andreas
Ganz ohne Abstimmung läuft auch ein EKF nicht. Aber ich hoffe mit Rs und
der Modellbau üblichen KV Angabe auszukommen. Ld und Lq werde ich wohl
über einen RLS Schätzer ermitteln. Gerade läuft aber der EKF zu langsam.
Wird aber.
Zu den Fähigkeiten. Ja ein EKF kann ohne die Rotorlage sauber anfahren
und auch bei sehr langsamer Drehzahl noch gute Ergebnisse liefern.
Richtungs Wechsel ist dann auch kein Problem. Er verliert bei 1000rpm
auf -1000rpm nur 1 Umdrehung. Beim Vorzeichen Wechsel.
Ist schon cool. N UKF ist da noch besser. Der hat den Antrieb immer im
Griff. Braucht aber noch mal 50% mehr Rechenzeit im Vergleich zum EKF.
Was in den papers immer nicht steht. Wie die die Beobachter auf realer
HW laufen lassen. Dann stößt man auf Probleme wie NaNs und andere
numerische Schreinereien. Im März will ich fertig sein dann poste ich
mal was dazu. Vorher wird nix veröffentlicht. Sonst wirft mir noch wer
vor ich hatte das nicht selbst gemacht.
Gruß
Tec
Hallo zusammen,
Gonzo und Tec, ich hoffe ihr seid noch da, aber natürlich gerne auch
andere ;)
Da ich mit meinem Winkelbeobachter immer noch nicht so richtig
weitergekommen bin, habe ich mir erstmal einen anständigen Motor und
optischen Drehencoder gekauft und diese mithilfe von zwei L Profilen
miteinander verbunden.
Zur Kontrolle des Encoders habe ich dem Motor einen künstlichen
Drehwinkel vorgegeben und mit dem des Encoders verglichen -> liegen
übereinander: passt.
Der Motor wird nur noch über Encoderwinkel steuert.
Wenn ich der SVPWM feste Werte, z.B V_d = 0.2 und V_q = 0.0 vorgebe,
dreht sich der Motor schön, mit anständigem Drehmoment.
Sobald ich auf die PI Regler umschalte, passiert alles Mögliche, nur
nicht das Richtige, der Motor ruckt, ändert die Drehrichtung und
Geschwindigkeit willkürlich.
An den Parametern habe ich schon ein wenig rumgespielt.
Code:
Wenn ich den Motor wiederum mit festen V_d = 0.2 und V_q = 0.0 steuere
und mir dabei die resultierenden I_d und I_q ansehe, schwingen diese
Sinusförmig. Ist das so in Ordnung?
Die Clarke und Park sind ja eigentlicht dafür da, diese Variablen
"winkelunabhängig" zu machen. Wenn diese sinusförmig sind, kann der
PI(D) Regler doch schlecht regeln oder sehe ich das falsch?
Frohe Weihnachten!
Grüße
Andreas
Andreas True schrieb:> Wenn ich der SVPWM feste Werte, z.B V_d = 0.2 und V_q = 0.0 vorgebe,> dreht sich der Motor schön, mit anständigem Drehmoment.
Moin,
da liegt schon der erste Fehler. V_d soll mit dem Fluss in Phase liegen.
Folglich muss bei V_d > 0 und V_q = 0 die Maschine stehen bleiben und
nix machen. Die Energie wird dann rein im Wicklungswiderstand um
gesetzt.
Wenn Id und Iq als sinusförmig gemessen werden. Dann dreht deine
Transformation falsche herrum. Also erstmal alles so lassen und einfach
das Vorzeichen von theta vor der Transformation drehen. Dann sollte
zumindest ein sauberer I_d und I_q gemessen werden.
Dann der gegen Test mit V_d = 0 und V_q > 0. Bei deinem jetzigen
Einstellungen sollte die Maschine also stehen bleiben. Wenn das so ist
bist du mit deinen Achsen (d/q) um 90° falsch.
Ich würde dann an deiner stelle folgendes machen.
dein Theta = 0 setzen.
V_d>0 und V_q = 0 setzen.
Warten.
Dann die Lage vom Encoder einlesen und als Offset speichern.
Dieses Offset ziehst du dann immer so von dem Encoder Winkel ab.
dann Spannung wieder aus.
und mit I_d = 0 un d I_q >0 anfahren.
dann sollte der Antrieb laufen.
Frohe Weihnachten
Tec
Ich habe mal eine Frage zu den ganzen Transformation. Ich habe bei
meiner Realisierung einfach diese Mc Donald Ms im Speicher abgelegt und
die PWM Amplitude damit Multipliziert. Der Stromregler sieht nur einen
einfachen DC Motor. Die App läuft prima...
Tecnologic schrieb:> da liegt schon der erste Fehler. V_d soll mit dem Fluss in Phase liegen.> Folglich muss bei V_d > 0 und V_q = 0 die Maschine stehen bleiben und> nix machen. Die Energie wird dann rein im Wicklungswiderstand um> gesetzt
Ok, das habe ich jetzt in den Griff bekommen, mit V_q = 0, V_d > 0, wird
die Energie in der Wicklung verbraten, ohne dass sich der Motor dreht,
wenn man ihn währenddessen mit der Hand dreht, hat man das Gefühl, dass
der Winkel so anliegt, dass der Motor sich gerade noch nicht drehen
kann.
Tecnologic schrieb:> Vorzeichen von theta vor der Transformation drehen
1
voidpark_transform(void)
2
{
3
park_angle=-park_angle;
4
5
sin_angle_once=sine_rad(park_angle);
6
cos_angle_once=cosine_rad(park_angle);
7
8
Id=Ialpha*cos_angle_once+Ibeta*sin_angle_once;
9
Iq=Ibeta*cos_angle_once-Ialpha*sin_angle_once;
10
}
I_d und I_q sind immer noch sinusförmig
Wenn ich vor der Rücktransformation das Winkelvorzeichen nicht wieder
zurückdrehe blockiert der Motor:
1
voidinverse_park_transform(MOTOR*m)
2
{
3
park_angle=-park_angle;
4
5
sin_angle_once=sine_rad(park_angle);
6
cos_angle_once=cosine_rad(park_angle);
7
8
Valpha=Vd*cos_angle_once-Vq*sin_angle_once;
9
Vbeta=Vd*sin_angle_once+Vq*cos_angle_once;
10
}
Tec Nologic schrieb:
> Wenn bei Theta = 0 und Vq = 0 und Vd = 1 gilt> Valpha = Vd = Va =1, Vbeta = Vq = 0, Vb und Vc ergeben sich dann.>> Für Theta = 0 liegen alle Koordinatensystem über einander. Vd-Achse auf> Valpha-Achse und auf der Va-Achse. Für Theta pi/2 bzw. 90° muss dann Vd> mit Vbeta gleich sein und Vq = -Valpha.
Tec Nologic schrieb:
> Für Theta pi/2 bzw. 90° muss dann Vd> mit Vbeta gleich sein und Vq = -Valpha
Ich habe die Rücktransformationen jetzt wieder tabellarisch dargestellt,
einmal mit V_d=1 und V_q=0 und umgekehrt um diese Tests die du weiter
oben empfohlen hast nochmal durchzuführen, aber es sieht eigentlich
alles richtig aus, siehe Anhang. (von -2PI bis +2PI rotiert)
Hallo Disco,
du hast quasi soetwas wie eine Lookup Tabelle, wie man sie für Sinus
macht, für diese POPO Kurven gemacht oder?
Sieht diene Clarke_Inv so aus:
1
Vr1=Valpha;
2
Vr2=(-Valpha+sqrt3*Vbeta)/2;
3
Vr3=(-Valpha-sqrt3*Vbeta)/2;
Ich habe meine aus einer AppNote und sie sieht so aus:
1
Vr1=Vbeta;
2
Vr2=(-Vbeta+sqrt3*Valpha)/2;
3
Vr3=(-Vbeta-sqrt3*Valpha)/2;
Wenn du die erste Version hast, holst du wahrscheinlich schon in der
inversen Parktransformation die sin und cos Werte aus deiner Tabelle
richtig?
Ich hole für jede Pahasenlage 3 um 120 grad gedrehte Amplituden aus der
Tabelle. Diese ist bis 60 grad 0 und verläuft dann sin förmig bis 120
grad dannach bis 240 grad als Summe zweier Sin Funktionen.
Die Werte multipliziere ich mit der Ausgangsspannung. Maximal darf diese
95 Prozent haben, da ich die Motoren als Servo betreibe un die
Augangstreiber Bootstrap haben.
Andreas True schrieb:> Wenn ich vor der Rücktransformation das Winkelvorzeichen nicht wieder> zurückdrehe blockiert der Motor:
Stop. hast du dabei V_d > 0 und V_q = 0?
Noch mal zur Klarstellung:
I_d ist in Phase zum Rotorfluss und damit der "flussbildende Strom".
I_q ist 90° rechtsrum voreilend gezählt und ist damit der
"drehmomentbildende Strom".
Folglich darf V_d keine Drehmoment erzeugen. Nur V_q. Und wenn du meinst
V_d und V_q konstant zu halten sich aber ein sinusförmiger I_d / I_q
ergibt. Dann dreht die Rücktransformation das Koordinatensystem anders
herum als die SVPWM. Folglich ist nur das Vorzeichen von Theta für die
Rücktransformation zu drehen.
Andere Frage kommt die Sinusimplementierung mit Tabelle mit negativen
Winkeln klar?
Gruß
Tec
Tec Nologic schrieb:> hast du dabei V_d > 0 und V_q = 0
Jup, habe ich.
In die inverse_park_transform() gebe ich die konstanten Werte V_d = 0.1
V_q = 0 ein.
1
voidclarke_transform(void)// Ia und Ib sind gemessene Phasenströme
2
{
3
m->Ialpha=m->Ia;
4
m->Ibeta=(m->Ia+2.0*m->Ib)*inv_sqrt3;
5
}
1
voidpark_transform(void)
2
{
3
sin_angle_once=sine_rad(park_angle);
4
cos_angle_once=cosine_rad(park_angle);
5
6
Id=Ialpha*cos_angle_once+Ibeta*sin_angle_once;
7
Iq=Ibeta*cos_angle_once-Ialpha*sin_angle_once;
8
}
1
voidinverse_park_transform(void)
2
{
3
if(encoder_ready==1)park_angle=-park_angle;
4
5
sin_angle_once=sine_rad(park_angle);
6
cos_angle_once=cosine_rad(park_angle);
7
8
Valpha=Vd*cos_angle_once-Vq*sin_angle_once;
9
Vbeta=Vd*sin_angle_once+Vq*cos_angle_once;
10
}
1
voidinverse_clarke_transform(void)
2
{
3
Vr1=Vbeta;
4
Vr2=(-mVbeta+sqrt3*Valpha)/2;
5
Vr3=(-Vbeta-sqrt3*Valpha)/2;
6
}
Dann noch die svpwm, und es kommen die im letzten Beitrag angehängten
POPO Kurven raus.
Tec Nologic schrieb:> Andere Frage kommt die Sinusimplementierung mit Tabelle mit negativen> Winkeln klar?
Ja, ich habe oben im Screenshot von -2PI bis +2PI transformieren lassen,
im negativen Bereich kommen auch richtige Werte raus.
Und ich wundere mich wieso der Beobachter nicht funzt... wenn es sogar
schon hier bei mir happert :/
Gruß
Andreas
Falls es von Bedeutung ist, die umgerechneten Phasenströme Ia und Ib
sind bei mir sinusförmig über der x-Achse, sprich sie schwingen zwischen
positiv und negativ.
Servus Andreas,
ich war zwischenzeitlich mal ein wenig ruhiger, bin aber noch da ;-)
Deine Transformationen sehen aus meiner Sicht i.O. aus. D.h. die
Vorzeichenumkehr ist denke ich nicht notwendig wenn nicht an anderer
Stelle noch ein Dreher ist. Bist Du die gesamte Kette schon mal
durchgegangen? (Sorry wenn ich das nochmal fragen sollte :-)) Ich hatte
z.B. mal einen Dreher in der Strommessung weil ich nicht berücksichtigt
hatte das ich in der Freilaufphase den Strom Messe und diesen damit noch
invertieren muss.
Zur Anlaufphase vielleicht noch was. Die habe ich etwas anders umgesetzt
als Du Tec. Ich mache es so:
ID= Anlaufstrom
IQ= 0
Theta soll konstant auf 0
Ich gehe hier davon aus, dass ich in der Anlaufphase im wesentlichen
einen d-Strom habe.
Dann warten bis der Rotor eingerastet ist. Im eingerasteten Zustand kann
ich dann auch den d-Stromregler überprüfen indem ich id soll verändere
und den Phasenstrom ansehe. Sollte hier was Schwingen passt der Regler
nicht.
Dann fahre ich den Winkel Theta entsprechend einer Drehzahl Solltampe
hoch. Alle Funktionen laufen hier schon. Nur der Drehzahlregler hat noch
nichts zu melden und der Transformationswinkel kommt aus der gesteuerten
Rampe, d.h. d und q Strom haben noch nix mit der Realität zu tun. Der
Observer läuft parallel mit.
Bei einer bestimmten Drehzahl schalte ich dann um auf den
Drehzahlregler. Dieser wird dann mit dem realen Wert des aktuellen
qStroms initialisiert. Der d-Stromregler bekommt den aktuellen realen d-
Strom als Sollwert vorgegeben. Später wird dieser dann auf 0 gefahren.
(Ld ==Lq). Damit habe ich zum Zeitpunkt der Umschaltung keinen Sprung im
Strom und der Motor bekommt zunächst nix mit. Für die Berechnung der
realen Ströme nehme ich dann natürlich den Winkel aus dem Observer.
In meiner Anlaufphase ist also eigentlich alles aktiv und kann damit auf
Funktion geprüft werden. Den Encoder kannst du z.B. auch in der
Positionierphase abgleichen um dann damit später in der hochlaufphase
den Observer zu prüfen.
Viele Grüße und schöne Weihnachten an euch alle,
Gonzo der jetzt Kuchen essen geht ;-)
Guten Tag,
Gonzo schrieb:> Ich hatte> z.B. mal einen Dreher in der Strommessung weil ich nicht berücksichtigt> hatte das ich in der Freilaufphase den Strom Messe und diesen damit noch> invertieren muss
Das habe ich natürlich auch vergessen.. Habe jetzt auf die Schnelle das
Vorzeichen von Ia und Ib umgedreht. Jetzt sieht Id und Iq viel "weniger
wellenartig" aus, und hat einen gewissen Offset zu der x-Achse, es
könnte also die Lösung sein :)
1
voidMeasCompCurr(void)// Rechnet ADC Werte in tatsächliche Stromwerte (in Ampere) um
Ich glaube meine RefSpannung, also die Spannung die bei 0Ampere Strom
geliefert wird (bei mir soll 1.5Volt), bei Phase 1 und Phase 2 etwas
unterschiedlich ist.
Könnte dadurch Id und Iq auch schwingen, weil ja dann Winkelberechnungen
(sin+cos) nicht übereinander liegen?
Könnte ich einfach zu meiner Variable 'ADC_Ref_Voltage' einen gewissen
Grundoffset solange dazu rechnen rechnen, bis Ia und Ib am Scope den
gleichen Mittelwert haben?
Ich werde es nachher ausprobieren.
Zu der Anlaufphase werde ich auf jeden Fall nochmal zurückkommen! Noch
brauche ich sie nicht (Außer um den Encoder zu initialisieren), da ich
jetzt erstmal nur mit dem Encoder die SVPWM richtig haben möchte, um
mich dann auf den Beobachter zu konzentrieren.
Gruß
Andreas
Hi Andreas,
das mit dem Offset ist auch so eine Sache und kann auch eine Welligkeit
mit rein bringen. Ich messe die Spannung deshalb zur Laufzeit und rechne
den gemessenen Offset mit in die Stromberechnung ein anstatt einen
festen Offset zu verwenden.
Eine andere Sache die eine Welligkeit mit rein bringen könnte ist ein
gewisser Unterschied zwischen Ld und Lq. Meine Erfahrung ist, dass auch
bei SPMSM Motoren die beiden Induktivitäten nicht 100% gleich sind.
Zuletzt hat auch noch die Zwischenkreisspannung einen Einfluss. Speist
Du deinen Motor aus einer DC Quelle?
Gruß Gonzo
Hi,
Gonzo schrieb:> Ich messe die Spannung deshalb zur Laufzeit und rechne> den gemessenen Offset mit in die Stromberechnung ein anstatt einen> festen Offset zu verwenden
Das hört sich gut, werde mir auch überlegen, wie ich das mache. Nimmst
du dafür den Mittelwert von den Sinusspitzen, bzw die Spitzenwerte aus
den ADC Messungen?
Gonzo schrieb:> Speist> Du deinen Motor aus einer DC Quelle?
Dafür muss bei mir leider ein umgebautes PC Netzteil herhalten :(
Auch meine Halbbrücken und die Strommessung ist wahrscheinlich nicht
gerade super aufgebaut und voller Störungen.
Werde vielleicht die Tage eine Platine entwerfen und ätzen lassen.
Mein Motor läuft übrigens endlich mit der SVPWM, mit dem Encoder und
sogar samt der drei Regler :)
Reicht es eurer Erfahrung nach, für d und q nur PI Regler zu verwenden
und für Omega PID?
So wie es jetzt bei mir ist, scheinen mir meine Regler etwas träge zu
sein, und beim wieder entlasten des Motors reagieren sie auch zu langsam
und der Motor baut viel zu viel Drehzahl auf und schwingt sich dann ein.
Stelle ich die Parameter schärfer, fängt der Motor an, laut zu pfeifen.
Aber ich bin erstmal froh, dass das ganze so läuft.
Vielleicht kann ich mich bald nochmal an den Beobachter ranwagen.
Grüße
Andreas
Moin,
den Offset Messe ich immer dann wenn kein Strom fließt, d.h. wenn der
Motor steht. Ich nehme dann einfach den aktuellen AD Wert und lasse ihn
in ein Tiefpassfilter laufen. Den Ausgangswert des Filters rechne ich
dann zur Laufzeit des Motors in die Stromberechnung ein, d.h.
Imotor=Adc-Offset.
Das der Motor jetzt läuft ist doch super!
Ich baue meine Regler immer nur mit PI Reglern auf. Meiner Erfahrung
nach ist das völlig ausreichend. Bei PID Reglern war ich bisher immer
etwas vorsichtig da ich öfters mal Probleme hatte wenn die Signale stark
vertauscht waren. Ich muss hierbei aber auch sagen, dass sich meine
Erfahrungen auf Lüfter und Pumpen beschränken. Bei Servoantrieben kann
das wieder anders aussehen. Hierzu kann ich keine Aussage treffen.
Bei mir ist der Aufbau PI für Iq,Id und Omega auf jeden Fall absolut
dynamisch genug.
Gruß, Gonzo
Hi zusammen,
@PID: habe den 'D' Anteil auf 0 gesetzt, so dass die Regler jetzt als PI
Regler arbeiten. Noch an den Parametern gespielt, die Dynamik passt
jetzt erstmal.
Der Motor läuft jetzt komplett eigenständig, ohne Encoder, mit
Beobachter und SVPWM :), vielen Dank an Tec und Gonzo für die Zeit, die
ihr dafür genommen habt!
Aber ab einer gewissen Drehzahl (~4k rpm bei ca 20% des max. Stroms des
Motors) gibt es Aussetzter, das ganze schaukelt sich auf und der Motor
ruckt nur noch wild. Habt ihr einen Software-LowPass in der
Phasenstrommessung? Ich glaube Tec hat es mal kurz erwähnt.
Hattet ihr auch das Problem, dass die Steuerung nach einem
Messfehler/Spike total durchdreht? Man könnte an die OpAmps noch
Kondensatoren hägen, aber dann würde man ja wieder eine
Phasenverschiebung reinbringen.
Ich habe jetzt das eingebaut:
1
adc_filtercoef=0.2;
2
3
Ia_filtered=Ia_filtered+adc_filtercoef*Ia-adc_filtercoef*Ia_filtered;// auch so entsteht Phasenverschiebung!
hilft aber nur bedingt.
Die adc-offsets werden jetzt gleich am Anfang rausgemessen, während der
Motor noch steht und es kein Strom fließt.
Grüße
Andreas
Andreas True schrieb:> Aber ab einer gewissen Drehzahl (~4k rpm bei ca 20% des max. Stroms des> Motors) gibt es Aussetzter, das ganze schaukelt sich auf und der Motor> ruckt nur noch wild
Frohes Neues,
klingt danach das deine Rotorlage Drehzahl anhängig zu weit vor eilt.
Ein kleiner TP auf den ADC-Werten der Strommessung könnte dies
kompensieren. Mit der Grenzfrequenz musst du experimentieren aber als
start weißt du das du bei 4krpm 90° Fehler da ist. Also würde ich den
Filter als IIR direkt auf die Drehfrequenz der Ströme bei 4kRPM setzen.
Dann haste da zusätzliche 45° Lag und damt nur noch einen Fehler von 45°
anstelle von 90°.
Damit läufts dann erstmal.
Gruß
Tec
Hallo Tec,
dir auch ein frohes Neues!
Das heißt, dass ich nicht drum herum kommen werde,
geschwindigkeitsabhängige Offsets einzubauen, damit der Motor bei jeder
Drehzahl wirklich sauber läuft oder?
Gehe ich bei der Offsetbestimmung richtig vor, wenn ich mir den
Phasenstrom am OpAmp Ausgang ansehe und den Offset so einstelle, dass
dieser möglichst sinusförmig ist?
Was mir aufgefallen ist, wenn ich Vd regeln lasse und Vq fest vorgebe,
erreiche ich höhere Drehzahlen und die Steuerung kommt nicht "plötzlich"
durcheinander.
Wäre es nicht besser, die Ströme erst nach der Park-Transformation, also
Id und Iq zu filtern und nicht direkt die Sinussignale der Strommessung,
weil ich dann drehzahlunabhängig bin und Phasenverschiebung kein Problem
darstellt? Jetzt nicht auf den Winkeloffset, sondern auf meine
(vermutlich) Spikeprobleme bezogen.
Gruß
Andreas
Id und Iq zu filtern ist nicht falsch. Aber ein TP für ia, ib und ic
bringt dir ja eine Drehzahl Abhängigkeit der Phase. Das willst du ja.
Der Beobachter scheint ja darauf ausgelegt zu sein.
Es ist ein BEMF Beobachter bei dem die berechnete BEMF mit einem LowPass
gefiltert wird.
So wie ich den Beobachter verstehe, wird der Filterkoeffizient des LPF
ständig an das aktuelle Omega angepasst.
Quasi so, dass die BEMF immer an der Grenzfrequenz gefiltert wird und
somit eigentlich keinen geschwindigkeitsabhängigen Offset bekommt
sondern jeweils -45° pro Filter (da Grenzfrequenz)
Koeffizient anpassen:
1
Kslf=Omega_fltred/20;// weil 20 Interrupt-Durchläufe pro Omega Aktualisierung
Am Ende der Beobachter Routine wird ein fester Offset von 90° auf den
Winkel addiert.
Deshalb "darf" ich keine Phasenverschiebung auf Ia, Ib und Ic legen.
Oder habe ich den Beobachter falsch verstanden?
Habt ihr, Tec und Gonzo, einen BEMF oder einen PLL Beobachter?
Ich hätte noch eine Frage zum Filtercoeffizienten von Omega:
Dieser wird in der AN10899 so berechnet:
1
FiltOmCoef=(OMEGA0/IRP_PERCALC/10);
2
// IRP_PERCALC ist hier wieder gleich 20, siehe oben
3
//OMEGA0 ist die niedrigste Geschwindigkeit, bei der mit Beobachter gefahren wird
Warum wird es hier zusätzlich durch 10 geteilt? Das kann ich absolut
nicht nachvollziehen.
Bis jetzt habe ich diese Division weggelassen. So läuft der Beobachter
gut, aber nur bis zu einer bestimmten Drehzahl, weil ich vielleicht
eben trotz des adaptiven Beobachters einen Winkeloffset bekomme, wie Tec
schon gesagt hat.
Mit der Division schwingt sich das ganze auf bis der Observer komplett
durcheinander kommt und nichts mehr geht.
Edit: Tec, wie geht es mit deinem Beobachter für niedrige Drehzahlen/aus
dem Stand voran? Freue mich schon, davon zu lesen :)
Gruß
Andreas
Moin,
zu der Implementierung von AN1089 kann ich nix sagen. Wir hatte das aber
schon mal meine Gonzo hatte geschrieben dass das 2 TP mit der
Grenzfrequenz auf w sind. also immer 90°.
Aber anscheinend überkompensiert der Beobachter. Entweder weil dein w
nicht simmt auf das die Filter gesetzt werden oder weil der SMO durch
den K Faktor zu aggressiv ist.
Ne TP direkt auf dem Strommesswert ist in deinem Fall aber nicht
verkehrt. Auch in der dsPIC Hardware muss in RC-Filter drin sein vor dem
ADC. Bei den niedrigen sample raten muss der auch auf ca.10kHz oder noch
weniger liegen. Und der fehlt dir würde ich tippen oder dein Hardware TP
liegt deutlicher höher mit der Grenzfrequenz.
@edit: PLL, Fluss, BEMF nervt etwas. N Flussbeobachter der über ne PLL w
bestimmt war für mich immer das robusteste. Du bist aber genau so
Parameterabhängig wie mit nem modellbasierten Beobachter. Und zur Zeit
schwöre ich da auf n UKF. Der Braucht zwar wesendlich mehr
Rechenleistung aber auf nem STM32F4 ist das kein Ding.
Mit aus Matlab generiertem Code in C++ und mit float kann ich die
Stromregelung mit Filter mit 16kHz laufen lassen. Mit etwas zusätzlicher
Beobachterrei komme ich dann vllt. auf 8kHz Beobachter 16kHz Stromregler
und 8 bzw. 16kHz PWM jenach Maschine.
Das einzige Problem bei mir ist zur Zeit die Bestückung von DRV8302 mit
dem Fön und die starke Abhängigkeit des Beobachters von der
Flusskonstanten der Maschine also quasie dem ominösen KV Wert der bei
Modellbaumotoren immer so angegeben wird.
Gruß
Tec
Jup, da liegst du richtig, externe LPF vor den ADCs habe ich (noch)
nicht, werde aber auf meiner geätzten Platine, die ich irgendwann mal
machen werde, dafür auf jeden Fall Platz lassen.
10kHz Filter wird ja noch keine starke Phasenverschiebung verursachen.
Tec Nologic schrieb:> SMO durch> den K Faktor zu aggressiv
Mit dem K Faktor meinst du den SMO Gain, nicht Kslf aus den BEMF Filtern
oder?
Der DRV8302 scheint ja ein sportliches Teil zu sein. Braucht der externe
Beschaltung für die Bootstrap Schaltung (Kondensator, Diode)?
Mit den integrierten OPVs hat man wohl viel weniger Rauschen oder?
Ich verwende zurzeit 3x IR2104 als FET Treiber, diese generieren
zumindest eigenständig die Totzeit um die Halbbrücke nicht zu grillen,
und man kann allg. bei denen nicht HI und LO gleichzeitig durchschalten.
Soweit ich mich erinnere sind die auch intern getaktet, damit der C aus
der Bootstrap nicht leergesaugt wird.
Der UKF scheint ja doch jede Menge Leistung zu brauchen. Mit dem STM32F4
brauche ich zurzeit mit dem Beobachter, absolut alles in Float, ohne
jegliche Optimierung, der gesamte Code total durcheinander ca 60-70% der
Leistung bei 20kHz (alle Programmteile).
Bis ich allerdings zu dem UKF kommen und verarbeiten werde, werden wohl
noch Jahre vergehen :D
EDIT: Aus dem KV Wert sollten sich doch die Konstanten (R und L), die
ich für dem SMO brauche, auch ableiten lassen. Oder muss ich dafür den
Spulendurchmesser, etc wissen..
Gruß
Andreas
Moin,
ich habe noch eine Verständnisfrage zur Phasenstrommessung.
Ich rechne meine 12Bit ADC Werte in tatsächliche Phasenstöme um,
sprich ich erhalte zwei 120Grad verschobene Sinus, die zB von -1.5A bis
+1.5A gehen.
Diese Werte gehen in Ia und Ib. Sie gehen in die Clarke Transformation:
1
voidclarke_transform()
2
{
3
Ialpha=Ia;
4
Ibeta=(Ia+2.0*Ib)*inv_sqrt3;
5
}
Da ich ja den Strom in der Freilaufphase messe, muss dieser zuvor
invertiert werden.
Bisher habe einfach das Vorzeichen von Ia und Ib umgedreht.
Ist das so richtig? Der Motor hat ja drei Anschlüsse, so wird sich die
induzierte Spannung ja über diese
drei verteilt. Darf man da wirklich einfach das Vorzeichen umdrehen?
Ich hatte ja vor ein paar Tagen das Problem, dass Id und Iq bei mir
sinusförmig ist, dann habe ich einfach die Vorzeichen getauscht.
Gruß
Du musst ja beide Ströme Invertieren und das sollte
transformationsinvariant sein. Also alles ok.
Einfacher gesagt setz mal -Ia und -Ib für Ia und Ib ein. Dann kommt
ganz normal -Ialpha und -Ibeta raus. Also alles ok.
Alles klar, wenigstens eine Sache richtig gemacht :D
Ich habe mich nur gefragt, weil wenn Iq so regeln lasse, dass ich meine
unüberwindbaren 4kRpm fast erreiche, speziel bei mir
1
I_q_soll=1.3;
2
I_d_soll=0.0;
und mir dabei I_d_IST, I_q_IST am Oszi leicht vergrößert ansehe, sind
diese immer noch Sinusförmig, und das nicht zu knapp. Iq schwankt
zwischen ca 0.5 und 1.2.
I_q_soll ist wie gesagt const.
Ich frage mich gerade, wie das ganze so stark schwankend überhaupt
laufen kann.
Können die Abweichungen zwischen den zwei ADCs und der 2 Kanäle des
doppel OPVs so stark sein, dass durch diesen Unterschied eine Art
Schwebung zwischen ADC1 und ADC2 und somit auf Iq und Id entsteht?
Oder der Stromverlauf des Motors strahlt so stark in die restliche
Schaltung...
Eine (noch) nicht ganz so wichtige Frage: Als uC verwende ich das
Evalboard von ST mit STM32F4 drauf. Die Treiber-, Leistungs- und
OPV-Schaltung ist auf einem Lochrasterplatine aufgebaut.
Ich möchte erstmal eine Leistungsplatine ohne des uC machen. Sprich, das
was ich jetzt auf Lochraster habe, ätzen lassen und den Controller
erstmal extern lassen. Ich habe mich bei den STM32s für diese Anwendung
noch nicht festgelegt.
Ist das Okay, oder sollte der uC unbedingt auf der selben Platine
sitzen, was ja natürlich weniger Masseprobleme, Spikes und andere
Schweinereien reinbringt.
Grüße
Andreas
Das schwingen klingt nach Regler. Mach mal reine P Regler zum probieren.
Was das Board angeht. Sieh dir das BOOST-BLDC oder so Board von Ti an
mit dem DRV8301. Ist günstig und gut.
Wen du es doch selber machen willst kannste die Discoverys mit
Buchsenleiste direkt aufs Board klemmen sollte auch nicht schlechter
laufen als jetzt. Klar das das nicht hoch genau wird von der
Strommessung aber du fährst ja kleiner 5A da ist das nicht so wild. Ich
sag mal so ab 20A Auslegung würde ich ein Board machen.
Ich hab aber auch bei 100A noch getrennte Boards. Jedoch ist die 2. nur
ein "Halter" für die Fets.
Gruß
Tec
Hallo zusammen,
wegen der Klausurphase im Studium arbeite ich zurzeit an der
Motorsteuerung nicht weiter.
Ab und zu google ich trotzdem nach verschiedenen FOC Themen.
Habt ihr (zB Gonzo und Tec :D ) schon mal InstaSPIN von TI angeschaut?
Dort wird es versprochen, aus einer Drehzahl von 0 heraus mit vollem
Drehmoment anfahren zu können. Nach weniger als einer elektrischen
Umdrehung soll der Motor schon vollständig geregelt laufen.
Man braucht keine besonderen Motordaten wie Induktivität oder Kv
Angaben. Nur max. Spannung und Stromstärke.
Rs misst er anscheinend ständig während der Laufzeit.
Und anscheinend soll der Beobachter auch auf Rotorfluss basieren:
FAST™-Software-Encoder
- Regelung/Kalkulation des Rotorflusses
Sind diese Angaben von TI doch sehr optimistisch oder arbeiten sie hier
nicht mit dem üblichen BEMF Observer sondern mit so etwas wie INFORM
(Indirect Flux detection by Online Reactance Measurement)?
Benötigt man für INFORM und für Rs Messung während der Laufzeit
zusätzliche Hardware zu meinen 3 Halbbrücken und Strommessung an zwei
Motorphasen?
Gruß
Andreas
Moin,
InstaSpin finde ich auch recht interessant ist aber nicht viel drüber zu
finden als Videos mit wie toll und einfach es geht.
Ich gehe davon aus das der Beobachter die Gleichungen im dq-System
umsetzt und dann wurde mit Lyapunov die Stabilität untersucht und die
Gleichungen darauf hin nicht linear ergänzt. Ich hab da mal n paper von
einem Schweden gesehen. Vllt schätzen sie dann noch Rs und Ls über einen
RLS-Schätzer, ist aber alles nur vermutet anhand des Verhaltens und was
TI so bekannt gibt.
INFORM werden die nicht machen.
1. Weil du das dann nicht auf nem 28xxx DSP laufen lassen könntest ohne
in böse Laufzeit-Probleme zu bekommen. bzw. du musst dir ganz schön den
Kopf zerbrechen.
2. INFORM braucht recht gute Kenntnisse von Ld und Lq bzw. muss diese
online ermessen. Das ist eher was wenn man n Industrie-Servo mit
sauberem Datenblatt in Positionsregelung ohne Geber betreiben will.
Für INFORM generell brauchst du nichts weiter mehr außer die
Rechenleistung und System mit ca. 1kHz drehen zulassen und das mit
kleiner Amplitude auf den Antrieb zu geben quasi als Summe zu deiner
normalen SVPWM. Dann kannst du dir die Impedanz bestimmen und aufgrund
dieser Aussagen zu der Rotorlage machen. Du hast aber immer noch die
Sigularität bei 180°.
Also wenn du dir die Induktivität als Ellipse vorstellst weißt du ja
nicht an welchem ende bist wenn du den Radius kennst. Es gibt genau 2
gegenüberliegende Punkte die passen.
Was mich aber speziell interessieren würde wie FAST reagiert wenn du da
n Innenläufer anschließt und dann danach n großen 60iger Außenläufer.
Wie kommen die da klar mit ihrer Parameterschätzerei.
Der Parameterschätzer ist nicht eingeschwungen und liefert dem
Lagebeobachter falsche Werte der schätzt falsch und damit passt das
Modell des Parameterschätzers nicht mehr. Das ist im Stillstand etwas
problematisch.
Da kommen die wohl nur raus in dem sie Strom fix einregeln den Winkel
vorsteuern und dann halt in unter einer Umdrehung ne zuverlässige Lage
haben. So interpretiere ich die Marketing Infos die TI bisher raus
gegeben hat.
Aber wie gesagt das ist nur meine Einschätzung des Ganzen.
TI ist auf jeden Fall am weitesten bei dem Thema.
Gruß
Tec
Hallo,
es wäre schon interessant, von denen so ein InstaSPIN Board zum
experimentieren zu haben. Ganz günstig sind sie aber nicht für privat.
Aber ob diese automatische Parameteranpassung am Ende genau so gut
funktioniert (zB Wirkungsgrad) wie wenn man den Beobachter händisch per
Oszi einstellen würde?
Falls es euch interessiert, hier der Link zur Entwicklung meines
Motorcontrol-Boards. Vielleicht habt ihr auch ein paar Tipps für mich.
Habe dort bischer leider noch nicht viel Feedback bekommen.
Beitrag "Schaltung für Motorsteuerung"
Gruß
Andreas
Hallo Andreas,
INSTASpin und INFORM kenne ich ehrlich gesagt auch nur aus dem Internet
bzw. aus Vortragsunterlagen von Professor Schroedl. Ich hatte zwar mal
einen Vertriebler von TI im Haus aber die Infos waren nur sehr spärlich.
Theoretisch könnte ich mir das ganze wie Tec schon geschrieben hat
vorstellen, muss jedoch auch sagen das ich mich noch nicht wirklich
damit befasst und dadurch noch einige Verständnislücken habe.
Die Umsetzung der INFORM Methode ist denke ich auch sehr aufwendig. Ich
bin mir auch nicht sicher ob es hier schon richtige Umsetzungen in Serie
gibt. So wie ich meine Kollegen verstanden habe die die Schulung besucht
haben, wird hier auch noch aktiv gearbeitet. Das ist denke ich auch der
Grund warum es hierüber noch recht wenig zu finden gibt. @Tec: Bitte
korrigier' mich wenn das Quatsch ist ;-)
Sorry, aber leider kann ich nicht mehr dazu schreiben.
@Andreas: Werde versuchen mir deinen Schaltplan mal anzusehen. Bin im
Moment auch recht stark beruflich eingebunden. Deshalb dauert es immer
etwas :-)...
Gruß,
Gonzo
Hallo Gonzo,
sehe ich auch so. Ich habe INFORM oder ähnliche HF-Injection Verfahren
auch bisher nur auf dem Papier/im Labor gesehen.
Wobei ich mir die TI Docs nach meinem Post noch mal angesehen habe.
Anscheinend messen die vor Motorstart die Parameter. Da steht was von
typisch 2min Messdauer. Gehe davon aus das die dann einfach ne
Impedanzmessung machen.
Wegen der Schaltung werde ich auch mal rein sehen.
Gruß
Tec
Hallo,
ich würde hier auch nochmal kurz eine zwischen Frage stellen. Ich
versuche mich aktuell auf an einer BLDC-Ansteuerung über FOC. Im Moment
versuche ich die Single-Shunt-Strommessung in Betrieb zu nehmen. Wenn
ich den Motor durch drei Lastwiderstände in Sternschaltung ersetzte
kommen auch schon ganz passable Ströme raus. Messe ich jedoch mit dem
Motor als Last, dann sehen die Ströme nicht wirklich toll aus. Kann dies
davon kommen, dass ich den Motor ja nur mit erzwungenem Winkel fahre,
oder liegt hier ein Fehler vor? Zur Strommessung verwende ich einen
ACS709 Hall-Effekt-Stromsensor.
Vielen Dank schon mal für eure Mühen und die vielen tollen Info hier in
dem Thread.
Viele Grüße und Schönen Abend Michael
Moin,
Wenn du den Motor gesteuert fährst dann lockt er aber das sollte bei
gesteuertem Winkel deinen Strom nicht so stark beeinflussen.
Ist dein Stromregler in Ordnung? Bzw. bist du mal mit fixer Spannung
Ud/Uq gefahren?
Ich bin gerade kannst du mal eine PWM Periode mit dem Scope aufzeichnen
wo man die Messintervalle sieht? Also PWM auf 51% 50% 49% jeweils einer
Phase und die Strommessung, damit man sieht ob da nicht Überschwinger
auf dem Signal sind.
Von wie viel Strom reden wir bei deinen Bildern?
Gruß
Tec
Hallo,
ich verwende bisher nur den SVPWM Teil und geben Teta fest vor. Dann
kommen hinten die drei bekannten Spannungsverläufe raus. Diese passen
auch zu den Bilder. Der Strom nur eben nicht. Ich habe leider nur ein
zwei Kanal Oszi, aber die Messung kann ich heute Mittag gerne machen.
Ich triggere die Messung 2µs vor der nächsten Flanke eines PWM-Kanals.
Die ADC-Messung dauert knapp über 1µs.
Viele Grüße Michael
Wie viel Duty fährst du? Mich stört an der 1 Shuntmessung immer das du
immer darauf angewiesen bist das alle 3 PWM Dutys weit genug aus
einander liegen. Bei dir müsste ja mindestens ein Unterschied von 1µs
sein, damit du alle Ströme messen kannst. Willst du Sensorlos fahren
später?
Hi Michael,
wenn Du Single-Shunt-Lösung schreibst meinst Du die Messung im
Zwischenkreis, oder? Wenn ja ist der Abtastzeitpunkt sehr wichtig da Du
hier nicht immer den Strom "siehst". Zudem gibt es hier auch immer
Zeitfenster in denen ein Strom nicht messbar ist. Hier gibt es dann noch
Verfahren die das wieder kompensieren.
Was mir zur Stromverzerrung noch einfällt ist die EMK des Motors. Ist
deine EMK sinusförmig? Wenn nicht könnte das auch eine Ursache sein.
Wenn Du als Ersatzlast nur Widerstände verwendest könnte Dir die
fehlende Induktivität ggf. Probleme machen. Ich verwende hier immer
Statorpakete ohne Rotor als Ersatzlast um hier bei der ersten Abstimmung
möglichst nah an der Realität zu sein.
Ansonsten würde ich wie Tec schon geschrieben hat auch mal den
Stromregler etc. anschauen.
Gruß,
Gonzo
Guten Abend
Tec Nologic schrieb:> Wie viel Duty fährst du?
Das Duty ist ja vom Winkel der SVPWM abhängig. Ich gehe mit Iq=max und
Id=0 in die Brechung der SVPWM.
Tec Nologic schrieb:> Mich stört an der 1 Shuntmessung immer das du> immer darauf angewiesen bist das alle 3 PWM Dutys weit genug aus> einander liegen.
Ich verwende ein zentriertes PWM. Liegen zwei Tastverhältnisse zu nahe
beieinander, dann verschiebe ich eins oder evtl. auch bei so, dass das
Messfenster groß genug wird. Dadurch wird das PWM unsymmetrisch. Dieses
Prinzip wird in einigen App-Notes von Herstellern beschrieben, deshalb
denke ich, dass dieses Verfahren schon funktionieren müsste.
Gonzo schrieb:> Ist deine EMK sinusförmig?
Im Anhang eine Messung dazu. Sollte passen oder?
Gonzo schrieb:> Wenn Du als Ersatzlast nur Widerstände verwendest könnte Dir die> fehlende Induktivität ggf. Probleme machen. Ich verwende hier immer> Statorpakete ohne Rotor als Ersatzlast um hier bei der ersten Abstimmung> möglichst nah an der Realität zu sein.
Das kann ich natürlich noch versuchen. Danke für den Tipp!
Vielen Dank und viele Grüße Michael
Michael Mayer schrieb:> Ich verwende ein zentriertes PWM. Liegen zwei Tastverhältnisse zu nahe> beieinander, dann verschiebe ich eins oder evtl. auch bei so, dass das> Messfenster groß genug wird. Dadurch wird das PWM unsymmetrisch. Dieses> Prinzip wird in einigen App-Notes von Herstellern beschrieben, deshalb> denke ich, dass dieses Verfahren schon funktionieren müsste.
Das ist natürlich eine Möglichkeit.
Die BEMF ist ja sehr schön. Was ist das für ein Motor?
Mich würde die Strommessung mit dem Stator auch interessieren ich
vermute wie Gonzo das dir der Stromfluss mit Widerständen zusammen
bricht mangels Induktivität.
Gruß
Tec
Moin,
Rotor fixieren bringts schon. Die BEMF entsteht ja durch die Rotation
des Rotors. Die Effekte durch das Magnetfeld des Rotors sind für die
Messung zu vernachlässigen.
Gruß
Tec
Moin,
ich bin mir nicht sicher wie es bei solchen Motoren mit dem Thema
Demagnetisierung steht? Die Motoren die ich ansteuere können schon mal
beschädigt werden wenn ich einen falschen Strom auf die Wicklungen gebe.
Du könntest alternativ auch was mit diskreten Induktivitäten und
Widerständen basteln.
Gruß
Ich habe unter anderem hier fast den gleichen Motor liegen.
Normalerweise kannst die Klammer hinten, an der dünnen Achse abmachen
bzw. die Madenschraube lösen und die "Glocke" mit etwas Kraft abziehen.
Die Achsen sind ja bei den meisten auch austauschbar. Geht in 2 Minuten.
Gibt auch Videos bei YT dazu.
Dann musst du nichts fixieren und kannst auch nichts entmagnetisieren.
Gruß
Andreas
Hallo,
Andreas True schrieb:> Normalerweise kannst die Klammer hinten, an der dünnen Achse abmachen
ja stimmt. Ging ganz einfach. Aber die Messung die ich dann nur mit dem
Stator gemacht habe, hat mich etwas Überrascht. Sieht ziemlich komisch
aus. Vermutlich stimmt meine Software doch nicht.
Viele Grüße Michael
Das sieht in der Tat so aus als wenn da was nicht passt. Was mich
wundert ist warum Passt das bei den Widerständen als Last, bei denen
würde ich eher vermuten das dass nicht passt, wegen fehlender
Induktivität.
Prüfe das ganze doch mal Phasenweise. Die Messung der Anderen Phasen
ignorieren und erstmal prüfen misst du die erste Phase an allen Stellen
an denen du sie messen willst.
Und prüfe mal die Versorgungsspannung des Sensors, wenn die PWM läuft
und Strom fährt. Diese Hallsensoren sind da sehr empfindlich.
Guten Abend,
Tec Nologic schrieb:> Und prüfe mal die Versorgungsspannung des Sensors, wenn die PWM läuft> und Strom fährt.
Habe ich nun gemacht. Und diese sieht wirklich nicht besonders gut aus.
Ich weiß allerdings nicht ob es von meinem Oszi kommt, oder ob das
Signal echt so schlecht ist. Habe extra den LT1461 verwendet, weil ich
dachte damit bekomme ich die Spannung recht sauber. Muss ich wohl
nochmal nacharbeiten. Danke euch!
Schönen Abend noch. Grüß Michael
ok, dann hat die recht viel Power für ne Referenz. Was hattest du da für
einen Ripple gemessen, das waren ja wenige 10mV. Das ist eigendlich OK.
Es passiert aber gern das beim schalten der PWM die Spannungen absacken.
und dass mögen die Hallsensoren garnicht.
Michael,
hast du eigentlich mal deine SVM mit zB d=1 und q=0 über 360° in
Mathlab, excel o.ä. durchsimuliert?
Ich hatte diese Transformation zuerst aus der AN1078, aus dem C
Kommentar neben dem Assembler Code rauskopiert. Und leider waren dort
ein paar Fehler drin, sprich ich habe keine sauberen POPO Kurven
rausbekommen, siehe meine Screenshots weiter oben. Der Motor hat sich
trotzdem gedreht.
Gruß
Andreas
Hallo,
ich habe im Anhang mal ein Oszibild von zwei Ausgangs-Phasen des
Reglers.
Die Popo-Kurven sehen meiner Meinung nach gut aus.
Viele Grüße Michael
Guten Abend,
ich habe nun nochmals alle kontrolliert. Auch die Triggerung des ADCs
habe ich nochmals mit dem Oszi kontrolliert. (Geht mit einem 2-Kanal
nicht so ganz optimal). Mir sind aber keine Fehler dabei aufgefallen.
Ich habe noch minimale Verbesserungen am Code vorgenommen. Aber
zufrieden bin ich immer noch nicht. Eine Phase sieht recht gut aus, die
anderen beiden aber eher nicht. Von euch noch jemand eine Idee?
Viele Grüße Michael
Die Blaue Phase sieht gut aus. Der Rest passt irgendwie nicht.
Kannst du mal die Spannung über dem Shunt mit dem Scope aufzeichen?
Wieviel Strom fährst du im mittel und wie groß ist der Shunt?
Das muss doch hinzubekommen sein.!!!
Hallo,
Tec Nologic schrieb:> Kannst du mal die Spannung über dem Shunt mit dem Scope aufzeichen?
ich verwende ja statt eines Shunt einen Hall-Effekt-Sensor. Dieser
sollte ja aber eigentlich genau so funktionieren.
Aber ich kann man die Spannung über dem ACS709 messen. Dieser hat einen
Innenwiderstand von 1,1mOhm.
Viele Grüße Michael
Ach ja. ne dann mach mal bitte die Messung am Ausgang des ACS. Wie viel
Strom fährst du da durch?, Und könntest du in der Messung auf dem 2.
Kanal immer eine der drei Phasen PWM mit messen damit man sehen kann
wann für die Phase gesampled wird?
Ist es vllt möglich PWM zufahren und durch den ACS von einem 2. LabNt
einen strom durch zu fahren. So habe ich bei meinen ACS758 den Fehler
gefunden mit der Versorgungsspannung.
Also ACS zwar von der Schaltung versorgt aber der Strom durch den ACS
wird von einem externen NT eingeregelt. Das du theoretisch einen DC
Strom messen müsstest. auf allen 3 Phasen. Um zu prüfen ob alle
Messungen plausibel sind.
Tec Nologic schrieb:> Wie viel Strom fährst du da durch?
Kann ich nicht genau sagen. Meinem Multimeter vertraue ich bei der
Kurvenform nicht wirklich.
Tec Nologic schrieb:> Und könntest du in der Messung auf dem 2.> Kanal immer eine der drei Phasen PWM mit messen damit man sehen kann> wann für die Phase gesampled wird?
Kann ich machen. Aber der Ausgang des ACS709 ist auf dem Oszi ziemlich
unsauber.
Tec Nologic schrieb:> Ist es vllt möglich PWM zufahren und durch den ACS von einem 2. LabNt> einen strom durch zu fahren. So habe ich bei meinen ACS758 den Fehler> gefunden mit der Versorgungsspannung.
Ja ist möglich. Ich versorge gerade Leistung und Steuerung aus
unterschiedlichen Quellen. Masse habe ich natürlich verbunden. Fahre ich
mit einem Gleichstrom durch den ACS, dann bekomme ich jedoch keinen
Gleichstrom bei der Messung. Die Messwerte werden ja abhängig vom Winkel
ausgewertet. Oder wie meinst du das genau?
Vielen Dank für deine Hilfe! Michael
Guten Abend,
wenn du mit einem gesteuerten Winkel fährst und einfach mit dem Scope am
Ausgang deines Stromsensors misst, müsste man doch auch einen Sinus
erkennen. (ist vllt nicht sofort zu erkennen, da mit PWM überlagert)
Vielleicht einen kleinen Lowpass vor Scope schalten.
Hat dein Controller einen DAC Ausgang? Beziehungsweise, hast du mal
geschaut ob dein uC saubere Stromwerte von dem Stromsensor bekommt. Ich
meine, ohne dieser "ein Shunt Messung".
Falls noch nicht:
ADC ganz normal in der PWM Mitte triggern, ohne Messpunktverschiebung.
Ich habe es bei mir so kontrolliert, dass ich gleich in der EOC Routine
des ADC den ausgelesenen ADC Wert sofort auf den DAC gelegt habe.
Den DAC Ausgang habe ich dann per Scope mit meinem OPV Ausgang
verglichen.
So konnte ich zumindest sicherstellen, dass die richtigen Stromwerte im
uC ankommen.
Ich denke es ist nicht so einfach gleich eine FOC mit Singleshunt
Messung zu implementieren. Du hast quasi 4 Themengebiete auf einmal:
SVPWM, Beobachter, Regler, Singleshunt. Meine Steuerung läuft auch noch
nicht anständig :D
Gruß
Andreas
Michael Mayer schrieb:> Fahre ich> mit einem Gleichstrom durch den ACS, dann bekomme ich jedoch keinen> Gleichstrom bei der Messung. Die Messwerte werden ja abhängig vom Winkel> ausgewertet. Oder wie meinst du das genau?
Naja Aber Sektorweise müssten die Ströme doch gleich sein. Es darf sich
auf jeden Fall kein Sinus ergeben sonder eher eine art Pulsmuster. und
dass müsste symetrisch sein wenn die Messung ok ist.
Hallo,
Tec Nologic schrieb:> Naja Aber Sektorweise müssten die Ströme doch gleich sein. Es darf sich> auf jeden Fall kein Sinus ergeben sonder eher eine art Pulsmuster.
Ach jetzt verstehe ich. Im Anhang die Ergebnisse der Messung. Diese
ergab eine Art Pulsmuster, das auch nahezu symmetrisch ist. Also scheint
dieser Teil soweit zu funktionieren.
Viele Grüße und nochmals Dank für eure Bemühungen!
Michael
Hallo,
ich habe die Messung auch mit einem Leistungswiderstand mit 0,15 Ohm
gemacht. Die Ergebnisse sehen ähnlich aus. Wenn ich drei
Lastwiderstände als Motor anschließe, kommt auch bei Ansteuerung über
die PWM das Pulsmuster raus. Allerdings kein Sinus. Auch wenn ich den
Stator anschließe kommt kein annähender Sinus zu standen. Ich würde den
Fehler in der Software vermuten. Was meint ihr?
Viele Grüße Michael
Du fährst rein die SVPWM oder Stromregler? Vllt ist es sinnig mal einen
robusten PI Regler anzusetzen vllt ist deine Last ja nicht wirklich
symetrisch.
Hallo,
einen Stromregler habe ich noch nicht eingebaut. Habe erst nochmals
anstelle des ACS mit einem Shunt-Widerstand und einem
Differenzverstärker getestet. Aber das Ergebnis ist nicht viel Besser.
Ich werde es dann mal mit einem Regler, wie von Tec Nologic
vorgeschlagen versuchen.
Viele Grüße Michael
Hallo,
ich hätte wieder ein paar Fragen zu den PID Reglern für die FOC.
Verstehe ich es richtig, dass ein solcher Regler sich aufgrund
des I Anteils "aufhängen" kann, so dass er nur noch den Max Wert
liefert?
Grundsätzlich läuft die Motorsteurung, auch der Drehzahlregler.
Allerdings schaffe ich gerademal die Hälfte der angegebenen MaxDrehzahl.
Und dafür muss ich die Reglerparameter schon extrem scharf stellen, so
dass
die Maschine bei langsamen Drehzahlen stark surrt.
Die Parameter habe ich über STMStudio durch ausprobieren ermittelt,
angefangen bei den Werten
aus AN1078.
Müsst ihr die Parameter auch immer so extrem individuell anpassen, weil
der Motor sonst
nichtmal die Hälfte der Drehzahl schafft?
Habt ihr vllt einen Tipp für mich, wie ich die Parameter für d, q, w am
besten finde?
Ich verwende einen kleinen Modellbaumotor von robbe mit 10A.
Noch etwas:
Definiert sich die maximale Stromaufnahme eines BLDC nur über das
maximale Drehmoment
oder hängt es auch von der vorliegenden Drehzahl ab?
Konkret:
Sollwert für w Regler auf 1000rpm, ich belaste den Motor -> w Regler
regelt q nach -> bei 2.5A bricht die Steuerung zusammen.
Sollwert für w Regler auf 2000rpm -> die Steuerung bricht erst bei 3.2A
zusammen.
Ist dieses Verhalten normal oder muss der Motor auch bei niedriger
Drehzahl (1/10 der Maxdrehzahl)
10A aufnehmen können?
Gruß
Andreas
Du hast die Koppeltherme vergessen:) Die Spannungsgleichungen für Ud
und Uq sind gekoppelt.
Sieh dir das bitte man in der Thesis von James Mevey an, da ist alles
drin was du brauchst.
Grob musst du auf den Ausgang des d regelers -w Lq Iq rechnen.
Und auf den Ausgang des q Reglers w Ld Id + w Psi_M.
Psi_M ist der Rotorfluss in Vs/rad den kannst du aus dem KV berechnen.
Musst nur die Einheiten umrechnen. w ist auch immer in rad angegeben
sonst passt das nicht.
Oder du siehst dir den Modified Synchronous Regulator von Shane Colton
an. Da regelt der d-Regler den Strom durch Änderung der Phase des
Spannungsvektors.
Was dein Problem angeht: Du musst immer daran denken für den Strom musst
du nur den Innenwiderstand der Wicklung von ca. 20mOhm bedenken. -> 10A
= 200mV. Die die notwendige Spannung wird also fast nur durch die BEMF
bestimmt. Und das ist eben w*Psi_M.
Das erklärt auch warum dein Drehzahlregler so viel muken macht weil der
Stromregeler total nicht linear arbeitet.
Gruß
Tec
Klingt einleuchtend, obwohl ich es noch nicht ganz verstanden habe.
Werde mir die Thesis auf jeden Fall ansehen.
Ich habe mal Probeweise den Op Gain in der Software testweise 10x so
hoch gesetzt wie er eig. in der Schaltung ist. Interssanterweise lässt
sich die Maschine jetzt viel besser kontrollieren. Schaffe nun bis zu
5.5A und ca 2/3 der max Rpm.
Ist es richtig dass ich damit die von dir angesprochene Nicht -
Linearität auf diese weise hinausgeschoben habe?
Gruß
Andreas
Moin,
habe mir das ein wenig angeschaut und ins Programm eingebaut.
Wenn auf meinem BLDC "1100kv" steht bedeutet es ja 1100Umdrehungen pro
Minute
bei 1Volt Spannung. Für eine Umdrehung des Rotors benötige ich
7 elektrische Rotationen. Also haben die Spulen eigentlich
7 * 1100 = 7700kv.
Wenn ich das jetzt in Psi_M [Vs/rad], also Ke umrechne:
7700kv / 60s = 128.33
Psi_M = 1 / 128.33 * 2Pi
= 0.00124 [Vs/rad]
Sehe ich das richtig oder sind diese kv Angaben auf den Motoren bereits
auf einzelne Spulen bezogen?
Ist es richtig, dass ich Ld und Lq, bzw Ls bei James Mevey erstmal
schätzen muss?
In welchem Bereich sollte ich deiner Meinung nach anfangen?
Gruß
Andreas
1mVs/rad klingt gut. Von der Größenordnung her. habs jetzt nicht
angerechnet.
Ls würde ich mit ca. 10µH erstmal annehmen. Bei dem kleinen Motor könnte
das halbwegs passen. n Rotomax 150cc hat ca. 8µH auf Ld und 12 auf Lq.
Das ist aber n Dreieck Maschinchen. Und leicht größer :).
Die Kopplung über Ld/Lq sind nicht stark. Ein genauer Rs und Psi_M sind
wichtiger. Gerade der Psi_M macht viel aus.