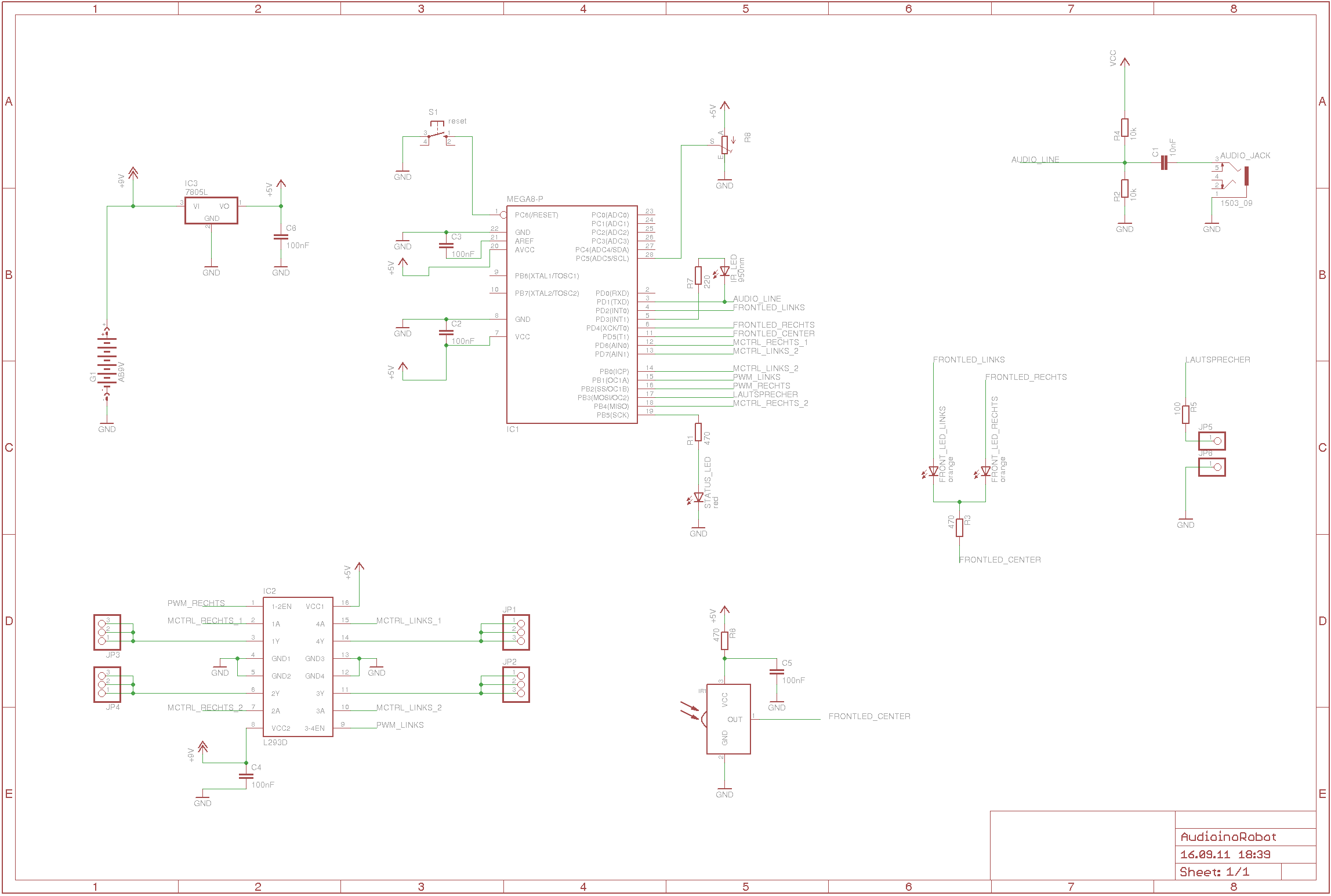
Hallo Zusammen, im Moment bin ich gerade dabei, einen Open Source Source Roboter zu entwickeln, der möglichst unter 20 Euro kosten soll. Das Ziel wäre, den Roboter für kleine Wettbewerbe zu verwenden: http://www.youtube.com/watch?v=oscbdxMhX_4 Damit der Roboter schnell zusammen gelötet werden kann und billig ist, sollen möglichst wenig Bauteile verwendet werden. Vielleicht möchte von euch jemand auch einen bauen ... Im Anhang der erste Entwurf der Schaltung. Grüße, ChrisMicro
Angehängte Dateien:
-

AudioinoRobot.png
27 KB
mit nem ausgeschlachtetem Furby kann man bestimmt mehr anfagen als mit der schaltung
Selten so einen Blödsinn gesehen (und das will in diesem Forum schon was heißen).
Du sagst, du willst bauteile spare, aber dafür kannst du nicht einfach die kondensatoren für die versorgunh weglassen. Genauso wie den am resetn zumalbda noch ein R fehlt. Den brauchst du bei deinen motoren welche deine schaltung ja sicherlich stören werden schon! Und so kônnte man noch eine weile weiter machen...
Also: Jetzt mal richtige Vorschläge, was es an der Schaltung zu optimieren gibt. Vom Roboter gibt es schon einen Prototyp. Er kann folgendes: - einer Linie folgen ( die Front LEDs lassen sich als Lichtsensoren benutzen ) - mit der IR-Fernsteuerung gesteuert werden - Hindernissen mittels Reflexion des IR Lichts und des IR-Empfängers ausweichen. - Mit Hilfe des Audio-Bootloader über Line Out programmiert werden - Als Entwicklungsumgebung lässt sich die Arduino-Lib mit GUI- verwenden - Melodien auf dem Lautsprecher abspielen Der Roboter ist also insbesondere für Schüler und Studenten für den ersten Einstieg in die Mikrocontrollerwelt geeignet.
>- Mit Hilfe des Audio-Bootloader über Line Out programmiert werden
Guter Witz. Wie lange braucht der für 8kB?
>Wie lange braucht der für 8kB? 8 Sekunden: http://www.hobby-roboter.de/forum/viewtopic.php?f=4&t=128
>>Wie lange braucht der für 8kB? > >8 Sekunden: Wie kontrollierst du ob die Daten auch wirklich richtig übertragen wurden? Verify ist mit deinem Audio Bootloader ja nicht möglich. Wenn das Programm dann wegen Bitfehlern in der Übertragung Mist baut ist der User komplett angeschissen. Kann er halt nochmal das Programm senden. Aber auch da wieder Bitfehler. Merkt er halt nicht gleich sondern etwas später. Vergiss den Quatsch. Du hast ja noch nicht mal einen Quarz am uC. Da wird dann je nach Mondphase mal dies oder das als Bit erkannt. Erinnert mich irgendwie an Datasette;)
Angehängte Dateien:
>Vergiss den Quatsch. Beitrag "Re: mimalistischer Aufbau um einen Atmega168 zu flaschen"
>Du hast ja noch nicht mal einen Quarz am uC. >Da wird dann je nach Mondphase mal dies oder >das als Bit erkannt. Hi Holger, Deinen Posts zu folgen hast Du noch nicht so viel Erfahrung mit der Elektrotechnik. Bei der verwendeten Manchestercodierung wird im Schnitt bei jeder zweiten Flanke neu synchronisiert, deshalb wird ein Quarz nicht benötigt. Genaueres findest Du hier: http://de.wikipedia.org/wiki/Manchester-Code >Wie kontrollierst du ob die Daten auch wirklich >richtig übertragen wurden? Verify ist mit deinem >Audio Bootloader ja nicht möglich. Die Kontrolle übernimmt der User selbst: Bei einem Fehler blinkt die Status-LED schnell. Aber keine Sorge: Im Gegensatz zur Datasette mit den Schwankungen der Bandgeschwindigkeit funktioniert der Bootloader ziemlich zuverlässig. Gruß, chris
Wenn es dein Budget noch hergibt, bau noch eine oder zwei 3-polige Stiftleisten auf die Platine, an die man Servos anstecken kann.
Was ich noch nicht durchschaut habe: Wozu FRONTLED_CENTER bei den Front-LED? Warum nicht einfach die LED gegen GND schalten und gut ists?
Die Motoranschlüsse: 3-polige Stiftleisten, die alle das PWM-Signal tragen? Mach doch an jedem Anschluss wenigstens 1 GND, damit der Kabelverhau nicht gar so groß wird.
Wie wärs den Roboter statt mit einem 9Volt-Block mit 3 Mignon-Zellen zu betreiben? Spart den 7805 und hält zudem länger. Beim Prozessor würd ich auch einen neueren Typ nehmen, z.B. mega88. Der mega8 ist alt und wird daher immer teuerer :-) Mit nem neuen Typ kannste dann die Batterien bis 2,7 Volt leerlutschen, was recht gut passt. Theoretisch kannst du dir bei 5Volt auch den Motortreiber sparen, einfach 2 pnp und 2 npn Transistoren also Stromverstärker hinterherschalten. :-)
Der L293D hat die Clamp Dioden schon integriert. Wenn man nur Transistoren nimmt, muss man die Dioden unbedingt noch ergänzen. Ich würde den L293 drin lassen. Aber der Vorschlag mit den drei Mignonzellen sollte bedacht werden.
klausr schrieb: > Der L293D hat die Clamp Dioden schon integriert. Klar, hast recht. Sollten also eher Mosfets sein, da sind dann Dioden drin :-) Ich mach sowas gern bei meinen Schaltungen, einfach einen IRF7389 mit beiden Gates an Prozessorpin, P-Source an +5V und N-Source an Masse. So hab ich nen Prozessorpin, der 5V und bis zu 5A kann :-) Shot-Through kann dabei bei 5V noch vernachlässigt werden.
Puh, jetzt bin ich froh, dass nach den ersten Troll-Postings auch ein paar nützliche Hinweise dabei sind. Danke dafür. >Was ich noch nicht durchschaut habe: >Wozu FRONTLED_CENTER bei den Front-LED? Warum nicht einfach die LED >gegen GND schalten und gut ists? Mit der Beschaltung kann man die LEDs sowohl als Leuchte und auch als Sensor benutzten: http://www.mikrocontroller.net/articles/Lichtsensor_/_Helligkeitssensor In meinen versuchen haben sich seltsamerweise die ultrahellen Orangen LEDs als am empfindlichsten herausgestellt. Blöderweise sind genau diese bei Reichelt gerade nicht lieferbar.
>Theoretisch kannst du dir bei 5Volt auch den Motortreiber sparen, >einfach 2 pnp und 2 npn Transistoren also Stromverstärker >hinterherschalten. Das wird beim Asuro so gemacht: http://mechatronik.tu-ilmenau.de/MTRWeb/publications/teach/ASURO_Prakt3.pdf ( siehe 9/22 3.7 ) Man braucht dann aber 8 Transistoren und 8 Widerstände für die beiden H-Brücken. Für Lötanfänger bedeutet das immer einen großen Zeitaufwand. Sie müssen die richtigen Transistoren an den richtigen Platz einlöten, das ganze dauert immer ziemlich lange und ist fehleranfällig. Deshalb habe ich den L293D gewählt, den es für 1,20€ zu kaufen gibt. Dieses wiederum bedingt den 78L05 und die 9V Block Batterie. Im Anhang der bisherige Schaltplan für Eagle, falls jemand darin malen möchte. Apropos: Wahrscheinlich werde ich Platinen machen lassen, wenn es mal soweit ist. Weiß jemand, wo man am günstigsten Prototypen her bekommen kann?

>meiner , aus 2 ollen Walkman Sieht gut aus :-) Schön gemacht. Auf Let's Make Robots gibt es momentan auch ein sehr günstiges Antriebssystem: http://letsmakerobots.com/node/28981#robot_em_video
Die grosse Schwester : http://www.bellibot.com/projects/botti/bot1.php Die Seite ist schon ein Paar Jahre nicht mehr aktualisiert worden :-(
>Die grosse Schwester : Ah, auch mit L293D. Interessant finde ich die LEDs an den Motorausgängen. Es ist immer gut, ein Lichtspiel am Roboter zu haben. Die hier haben das sehr schön gemacht: http://www.youtube.com/watch?v=3YDkbltzMmA Ich habe mit überlegt, die LEDs an die Steuereingänge des L293D zu sezten und über einen gemeinsamen Pin zu "enablen", dann könnte man die LEDs durch multiplexing unabhängig leuchten lassen.
Hi, hab mal ein Verständnisproblem. Es wird mithilfe der PC Soundkarte programmiert? D.h. irgend ein .wav/MIDI... dient als Programm? Ist hier der UART in Gebrauch? Wenn ja, warum wird hier das Ganze an TxD und nicht RxD vom µC angeschlossen (siehe Schematic weiter oben).
Die restlichen Pins könnte man herausführen um evtl. Addonboards zu benutzen. Würde man einen Atmega48/88 benutzen, wäre es möglich durch die weiteren PWM-Channels den SPI-Port freizurouten und hätte eine univerelle Schnittstelle für Zusätzliche Boards. UART wäre auch nicht schlecht. Damit könnte man ein Einfaches Kamera-Addon basteln.
fragezeichen schrieb: >Hi, >hab mal ein Verständnisproblem. Hi fragezeichen, >Es wird mithilfe der PC Soundkarte programmiert? >D.h. irgend ein .wav/MIDI... dient als Programm? Es ist ein wav-File. Man kann es sich sozusagen anhören: http://www.hobby-roboter.de/forum/viewtopic.php?f=4&t=129 >Ist hier der UART in Gebrauch? Wenn ja, warum wird hier das Ganze an TxD >und nicht RxD vom µC angeschlossen (siehe Schematic weiter oben). Für den Bootloader kann jeder digitale Eingang verwendet werden, so wie bei SOUNDRX Beitrag "SOUNDRX - Datenübertragung/Bootloader PC -> µC über PC-Soundkarte" Ich verwende den TxD-Pin, weil ich die Arduino-Lib als Grundlage für die Programme verwenden. Das serial.println geht an TxD raus. Hat man das entsprechende Programm auf PC-Seite, kann man via Line-In Daten empfangen.
Samuel K. (sam1994) >Die restlichen Pins könnte man herausführen um evtl. Addonboards zu >benutzen. Würde man einen Atmega48/88 benutzen Obwohl im Schaltplan ein Atmega8 eingezeichnet ist, verwende ich einen Atmega168. In meiner Eagle Lib war keiner drin und ich war zu faul das Problem zu lösen. Der Atemga168 ist ja Pin-kompatibel und die Arduino LIB braucht die Größe. >Würde man einen Atmega48/88 benutzen, wäre es möglich durch >die weiteren PWM-Channels den SPI-Port freizurouten und hätte eine >univerelle Schnittstelle für Zusätzliche Boards. Die etwas seltsam anmutende Mehrfachbelegung ist der Arduino-Kompatibilität geschuldet. I2C an den ADC-Eingängen könnte man freihalten.
Angehängte Dateien:
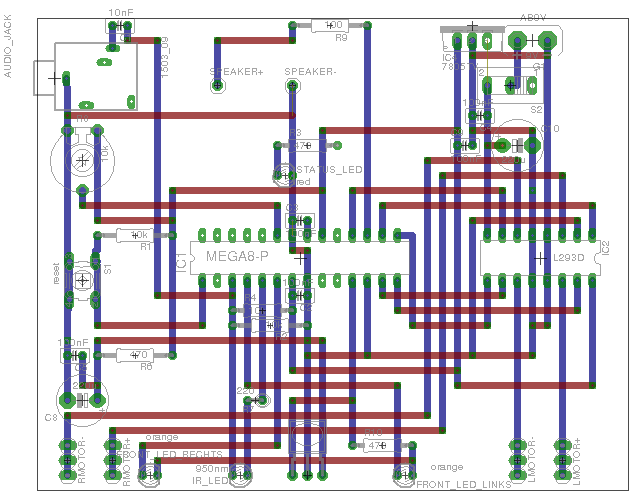
Um nicht unbedingt eine Platine ätzen zu müssen, kann man die Elektronik auch auf eine Streifenrasterplatine aufbauen. das geht dann wie folgt: 1. Layout ausdrucken 2. auf Platine kleben 3. Unterbrechungen der Streifen auf der Unterseite machen 4. Drahtbrücken auf der Oberseite ( rot ) bestücken 5. Bauteile bestücken Das würde dann so wie diese Schaltung aussehen: http://www.hobby-roboter.de/forum/download/file.php?id=122
Gerade gesehen:Streifenrasterplatinen sind ja richtig günstig für 1€ zu haben. http://www.reichelt.de/Streifenraster/H25SR100/index.html?;ACTION=3;LA=2;ARTICLE=8277;GROUPID=3373 Schöner wäre natürlich eine geätzte Platine, das spart einiges an Zeitaufwand. Für den Drahtbrückenaufbau braucht man mindestens 2 Stunden.
ChrisMicro schrieb: > das geht dann wie folgt: > > 1. Layout ausdrucken > > 2. auf Platine kleben > > 3. Unterbrechungen der Streifen auf der Unterseite machen > > 4. Drahtbrücken auf der Oberseite ( rot ) bestücken > > 5. Bauteile bestücken Oder das Programm Lochmaster verwenden.
>Oder das Programm Lochmaster verwenden.
Das Programm sieht für Schulungszwecke gar nicht schlecht aus. Die Frage
wäre, ob die Bauteilbibliothek so groß wie bei Eagle ist.
Bei Eagle könnte man die Platine aber auch 1:1 ätzen oder ätzen lassen,
das dürfte bei "Lochmaster" schwierig sein.
Hier das ganze Paket zusammen. Überarbeiteter Schalplan, Layout, Bootloader und Arduino Scetch, falls es jemand nachbauen möchte: http://www.hobby-roboter.de/forum/download/file.php?id=130
Habt Ihr eine Idee, welchen Step-Up-Converter auf diesem Roboter verwendet werden könnte: http://letsmakerobots.com/node/27516#robot_em_video
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.