Hallo, ich möchte mit einem Schrittmotor einen Gegenstand bewegen, der so ca. 500g wiegt. Der Gegenstand soll mit einem ca. 30cm Stab an der Achse des Motors angebracht werden. Die Bewegung geht immer hin und her und die Drehung, soll ca. 45° sein. Ungefähr von 10Uhr- bis 1Uhr-Stellung. Die Geschwindigkeit soll ca. 120 U/min sein. Wie stark muss da der Schrittmotor sein? Kann man so eine Aufgabe überhaupt mit einem Schrittmotor bewerkstelligen? Bin für jeden Tipp dankbar!
stepit schrieb: > Wie stark muss da der Schrittmotor sein? Dafür rechnest du das Drehmoment aus und guckst dann in den Datenblättern der Motoren bei der entsprechenden Drehzahl nach, ob es erreicht wird.
Bei den Anforderungen stell' dich schon mal auf einen größeren Motor ein. ;-)
Sorry, Drehmoment errechnen, da ist leider schon Schluß mit meiner Mathematik :-( Ich habe zwar im Wiki nachgesehen, wie man das rechnet, aber das sind für mich nur böhmische Dörfer. Könnt Ihr mir da helfen? Es ist keine Faulheit von mir!
stepit schrieb: > Kann man so eine Aufgabe überhaupt mit einem Schrittmotor > bewerkstelligen? Nö, dafür gibts Scheibenwischermotoren. Gruß Anja
Michael schrieb: > Dafür rechnest du das Drehmoment aus Da muß man aber noch vieeeeeeeeel Reserve für die Beschleunigungs und Bremsphase mit einrechnen (Massenträgheit). Gruß Anja
In der "9 Uhr" Position sind das statisch schon mal ca. 1,5 Nm. Das braucht der Motor mindestens als Haltemoment. Dazu dann noch Anja schrieb: > Da muß man aber noch vieeeeeeeeel Reserve für die Beschleunigungs und > Bremsphase mit einrechnen (Massenträgheit). MfG Klaus
> Bin für jeden Tipp dankbar! Kommt jetzt jeden Tag so eine blöde Frage, bis du endlich mit der Antwort zufrieden bist ? Beitrag "[S] Günstigen kleinen Schrittmotor" Beitrag "Fragen Schrittmotor/Servomotor?" u.v.a.m. Du willst offenbar nicht begreifen, daß deine Anforderung mit deinen Einschränkungen nicht zusammenpasst. Wenn Mama Nein sagt frag ich Papa, wenn Papa Nein sagt frag ich Oma... oh Mann.
Na, MaWin, das ist doch schon mal ein Tipp. Und wenn Du denkst, ich sei der Verfasser dieser Beiträge, dann irrst Du! Ich habe diese nur nicht richtig durchgelesen, das stimmt. Bei so vielen Beiträgen ließt man sich den Wolf. Deshalb, habe ich nach dem Motor für "meine" Anwendung gefragt. Wenn es den nicht gibt, dann ist ja gut. Oder auch nicht...
Drehmoment ist Kraft*Hebelarm, als M=F*r. Wenn das schon zuviel Mathematik ist, solltest Du das Projekt besser gleich aufgeben ;) Die Kraft ist im Zweifelsfall Masse * Erdbeschleunigung, also F=m*g. Oder vereinfacht 1kg^=10N. In deinem Fall also 1,5Nm statisch, plus die Beschleunigungsmomente. Da braucht du schon einen Schrittmotor mit 86mm Flanschmaß, oder einen Getriebemotor. Mit freundlichen Grüßen Thorsten Ostermann
Hey stepit. Tatsächlich stand ich vor einiger Zeit vor einer ganz ähnlichen Überlegung. [ siehe Beitrag "[S] Günstigen kleinen Schrittmotor" ] Als wesentlicher Unterschied zu Deiner Anforderung ist mir jedoch aufgefallen, dass Du hier nur einen Weg von "ca. 45 Grad" zurücklegen willst - vielleicht bietet sich da ein Servo eher an ? [ Die 120U/min fallen damit natürlich möglicherweise unter den Tisch. ]
Denk' Dir nichts bei den vorschnellen Kommentaren von MaWin, seine
Kommentare bestehen, zumindest seit einiger Zeit, überwiegend aus
flapsigen Kommentaren, selten aus Inhalt, der sich ernsthaft mit der
gestellten Frage auseinandersetzt.
Während ich nach längerem Mitlesen dieses Forums zwar selbst bereits
überdeutlich bemerken musste, dass oft einfach immer wieder dieselben
bereits mehrfach beantworteten Fragen gestellt werden
("Welches Oszi taugt mir für jeden denkbaren Einsatzzweck und wo
bekomme perfekte Markenqualität sicher zum Discounterpreis"),
oder derart schlecht formulierte und recherchierte Beiträge auftauchen,
deren Inhalt bestenfalls zum lautstarken Lachen animieren, so empfinde
ich den allgemeinen Ton in diesem Forum oft als unangenehm.
Viel zu oft antworten hier scheinbar "wahre" und selbsternannte
Experten, welche wohl häufig ein Studium und Berufserfahrung in dem
Gebiet vorweisen können, leider nur in abfälliger Weise auf die naiven
Probleme jener, die sich zwar für das Thema interessieren, aber dieses
nicht als Beruf ausüben können und daher schlichtweg ausserstande sind,
sich ein vergleichbares Wissen aneignen zu können.
Willst Du hier wirklich ernst genommen haben, musst Du die Antworten auf
die von Dir zu stellenden Fragen schon nahezu selbst beantworten können;
als hobbymässig Elektronikbegeisterter oder ambitionierter Neuling
kannst Du hier oft nur staunend am Rande stehen und musst im
Bedarfsfalle einer konkreten Frage darauf hoffen, dass ein Experte einen
guten Tag hat. In diesem Falle lässt er sich vielleicht dazu herab,
einen Krumen Erleuchtung in Form einer knappen Antwort ("Lies das
Datenblatt, welches Du mit Deinem Vorwissen eh nicht verstehen wirst")
vom Olymp der Wissenden in den Suhl der nicht Erleuchteten fallen zu
lassen.
Wenn Du mit diesen Bedingungen leben kannst, ist dieses Forum jedoch
dennoch eine gute Möglichkeit, vornehmlich durch stilles Mitlesen der
Unterhaltungen der wahrlich Erleuchteten, an Wissen aus dem Thema
gelangen zu können. Aber lass Dich nicht, etwa durch das Formulieren
einer naiven Frage, dabei erwischen ;)
stepit schrieb: > Die Bewegung geht immer hin und her und die Drehung, soll ca. 45° sein. > Ungefähr von 10Uhr- bis 1Uhr-Stellung. > Die Geschwindigkeit soll ca. 120 U/min sein. Back to topic: Auf einer normalen Uhr wären das 90°. Bist du sicher, dass der Winkel in 125 Millisekunden überstrichen werden sollen, incl. Beschleunigungs und Bremsphase? Dann ist in der Tat ein kräftigerer Motor angesagt. Als ersten Schritt könntest du dir die dabei auftretenden dynamischen Kräft ausrechnen. Zusammen mit den statischen Kräften ergibt sich daraus das mindestens erforderliche Drehmoment. Anhand des Zeitprofils kannst du dir auch die erforderliche Leistung ausrechnen.
Hmm .. stimmt. "10 bis 1 Uhr", das wären 90 Grad. Meinte der TE aber vielleicht mit "hin- und herbewegen", dass er von einem Mittelpunkt aus jeweils eine 45 Grad Bewegung vornehmen will ? Unabhängig von der angegebenen Geschwindigkeit würde ich als Lösungsansatz immer noch am deutlichsten den Einsatz eines Servos sehen. [Wie kommt die Forderung nach eben jener Geschwindigkeit überhaupt zustande ? Warum gerade 120U/min, warum nicht eine Aussage wie "10 auf 1 Uhr in einer halben Sekunde" ? Das wäre doch im gegebenen Anwendungsfall deutlich einleuchtender ?]
Angehängte Dateien:
-

Gest_nge.jpg
150 KB
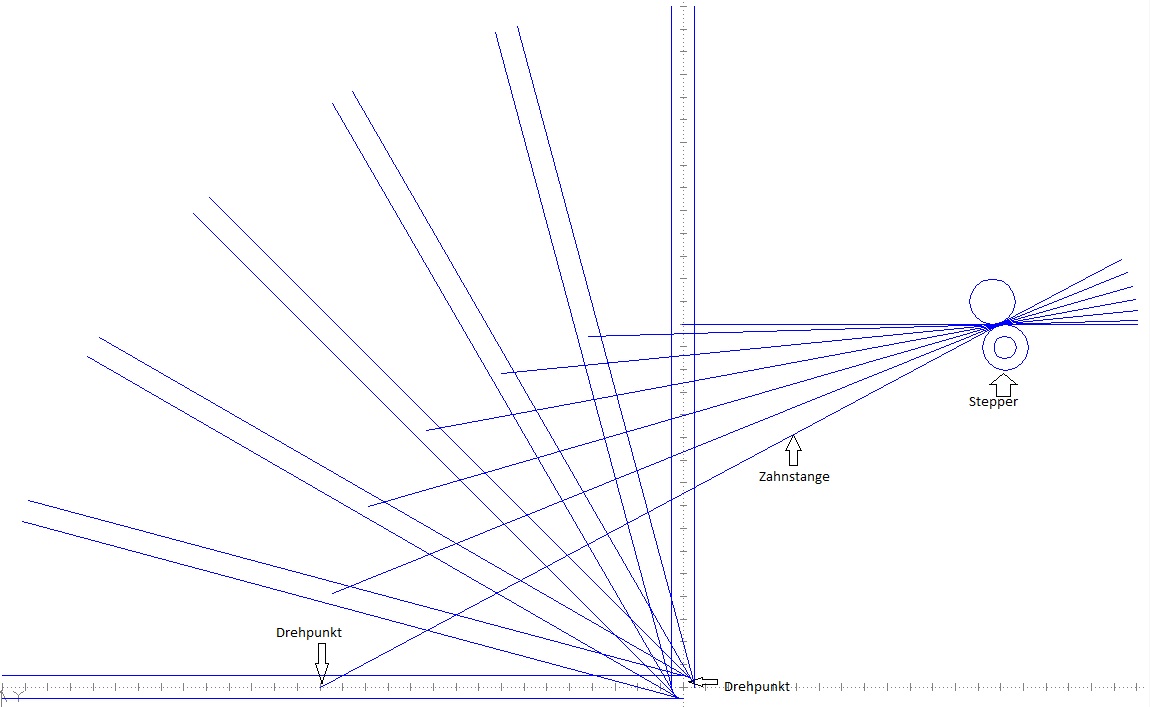
Dank Euch für die Tipps! Ja, die 120 U/min sind richtig, habe es nochmal nachgerechnet. Ja, der Motor wird wohl zu groß und damit zu teuer. Ich habe mir einen Mechanismus ausgedacht, der das Gewicht hält. Damit werden die Anforderungen an den Motor wohl geringer. Im Anhang habe ich mal eine Skizze, wie diese sein könnte. Eine Zahnstange wird per Zahnrad vom Stepper bewegt. Der Kreis über der Zahnstange soll die Führung sein, die die Zahnstange auf dem Stepperzahnrad hält. Ich hoffe, man kann verstehen, wie ich es meine. Meint Ihr, das bringt was?
Du könntest natürlich auch einfach ein gegengewicht mit gleichem Moment möglicht mit geringem hebelarm nahe der drehachse anbringen ... Dann musst du nur noch die Trägheit überwinden und nix mehr heben ...
Martin Schröer schrieb: > Mechanik vom Feinsten ... ;) lese ich da eine Spur von Sarkasmus zwischen den Zeilen? :-) Das Prinzip könnte doch aber funktionieren? 0^0 schrieb: > Du könntest natürlich auch einfach ein gegengewicht mit gleichem Moment > möglicht mit geringem hebelarm nahe der drehachse anbringen ... Dann > musst du nur noch die Trägheit überwinden und nix mehr heben ... Das ist auch noch eine Idee! Kann man da ungefähr sagen, um wieviel kleiner der Motor da wird?
Prüfe, ob ein Zahnriemenantrieb möglich ist: kleines "Ritzel" am Motor, (ca. 4 mal so) großes Ritzel am Drehpunkt der Stange. Vorteil: konstantes Drehmoment unabhängig vom Drehwinkel. Wie ist das mit den 120 U/min gemeint? Erklär mal bitte konkret, was Du machen willst. Sei Dir aber bewußt, wenn Du tatsächlich eine 125 ms-Zykluszeit haben willst, ist das ein anspruchsvolles Projekt.
stepit schrieb: > Das ist auch noch eine Idee! Kann man da ungefähr sagen, um wieviel > kleiner der Motor da wird? Klar kann man, wenn man mal die dynamischen und statischen Kräfte ausrechnet. Mit welcher Winkelbeschleunigung soll denn deine Mimik arbeiten? Zeige doch mal ein Winkel-Zeit-Diagramm zu dem vorgesehenen Bewegungsablauf.
Ich merke, da steckt jede Menge Theorie und Berechnung dahinter. Ich glaube, ich baue mir "einfach" erstmal einen Prototyp, mit einem kleineren Motor, den ich noch hier habe. Dann experimentiere ich etwas rum und sehe wie weit ich komme. Auch bezüglich meiner Vorgaben. Das waren ja die Maximalwerte. Kann sein, dass ich den 90° Winkel nur bei langsamerer Bewegung benötige und wenn es schneller wird, ich einen kleineren Winkel fahren kann.... Dank Euch!
stepit schrieb: > Dann experimentiere ich etwas > rum und sehe wie weit ich komme. Auch bezüglich meiner Vorgaben. Das > waren ja die Maximalwerte. Kann sein, dass ich den 90° Winkel nur bei > langsamerer Bewegung benötige und wenn es schneller wird, ich einen > kleineren Winkel fahren kann.... Das hast du gut gemacht, man sollte nie verraten was man vorhat! Sobald man etwas konkretes schreibt, können die Forensiker hier nämlich keine unpassenden Vorschläge mehr machen und die falschen Vorstellungen nehmen rapide ab.
Das war Sarkasmus. Die Mechanik, die weiter oben vorgeschlagen wurde, fand ich wirklich sympathisch. Erinnert an ein Uhrwerk :)
@Jack Ich verrate nie was ich bauen will, denn ich möchte das Teil ja nicht nächste Woche im Laden kaufen können. @Martin Ja genau, das wird eine Uhr, die nur einen Viertelkreis dreht. Das spart Zeit! Bis zu 75%. Genial! (auch Sarkasmus :-)) Mist, jetzt habe ich es doch verraten.
stepit schrieb: > Ich verrate nie was ich bauen will, denn ich möchte das Teil ja nicht > nächste Woche im Laden kaufen können. Warum nicht? Wenn Du es kaufen könntest, könntest Du Dir die komplizierte Bastelei sparen. Oder willst Du "DEIN" geistiges Eigentum schützen, das Du hier gerade von anderne Leuten konstruieren läßt?
ah, schon wieder ein "Angreifer" Schützen, klar. Konstruieren lassen, nein. stepit schrieb: > Ich merke, da steckt jede Menge Theorie und Berechnung dahinter. > Ich glaube, ich baue mir "einfach" erstmal einen Prototyp, mit einem > kleineren Motor, den ich noch hier habe. Dann experimentiere ich etwas > rum und sehe wie weit ich komme. Auch bezüglich meiner Vorgaben. Das > waren ja die Maximalwerte. Kann sein, dass ich den 90° Winkel nur bei > langsamerer Bewegung benötige und wenn es schneller wird, ich einen > kleineren Winkel fahren kann.... > > > Dank Euch! Deshalb habe ich dass hier geschrieben. So als Abschluss. Jetzt Kämpfe ich ja nur noch mit den "Angreifern". Damit hör ich jetzt aber auch auf und baue lieber am Prototyp. Gruß @Kritiker Ich muss dir in vielen Teilen deines Beitrages Recht geben!
DC Getriebemotor mit ner Kurbel, die eine Stange durch eine Führung laugfen läßt. An der Führung ist die Stange angebracht. Je nach Abstand der Führung und Größe des Rades am Motor kommt der Winkel zustande. Der Vorteil ist der Motor braucht nur auf konstater Drehzahl in eine Richtung arbeiten.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.