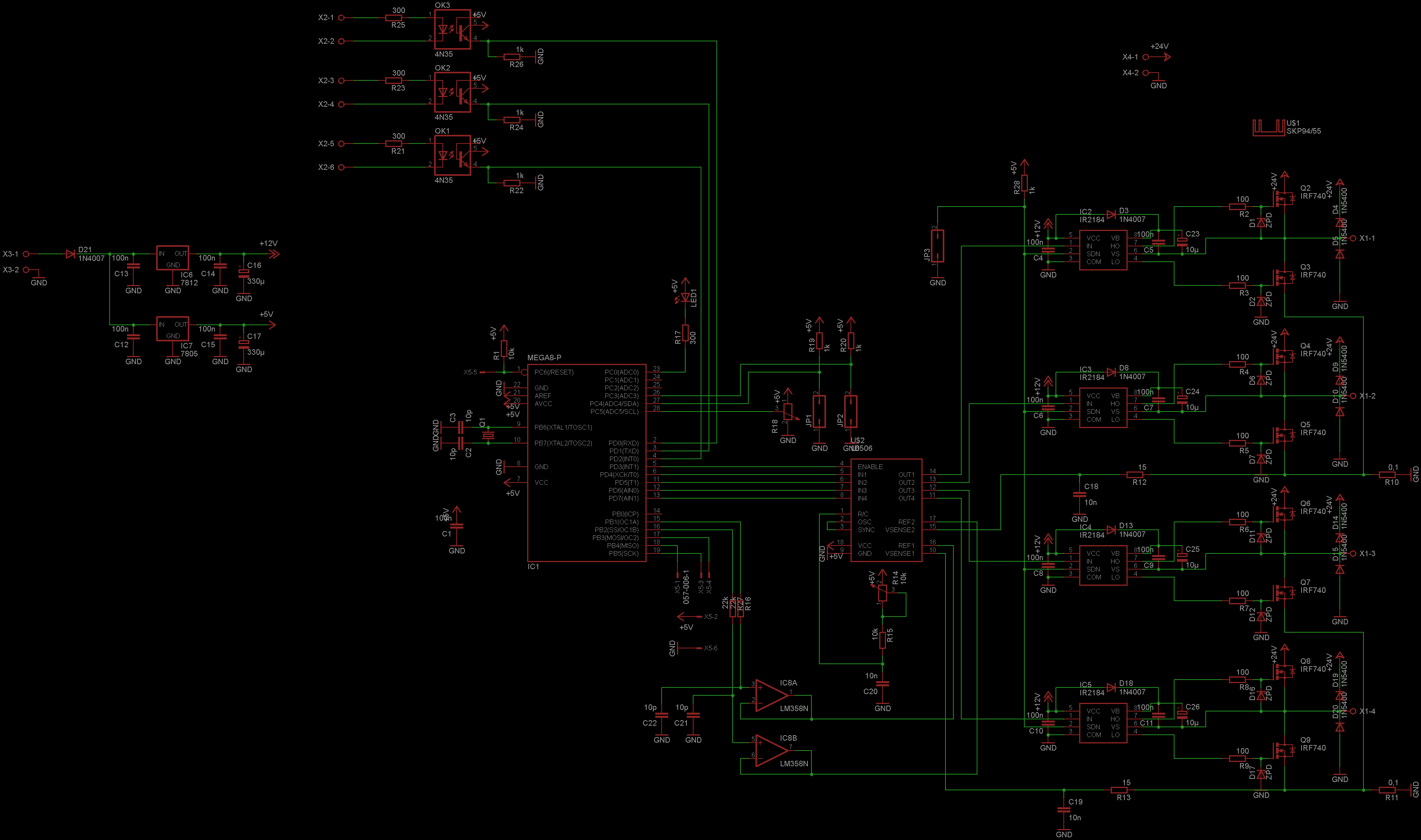
Hallo Leute, ich möchte für mich eine Schrittmotorendstufe mit Mikroschrittfunktion entwickeln welche ich gerne für künftige CNC/Automatisierungsprojekte einsetzten will. Die Endstufe soll auf jedenfall Mikroschritt können, und der Strom soll von 1A bis zu den 10A stufenlos/oder auch in 0,1A Schritten einstellbar sein. Der Mikroschritt soll bis 8fach µStepping gehen. Die Endstufe soll nur für bipolare Schrittmotore ausgelegt sein. Der Nebeneffekt soll sein das ich etwas mehr über die Schrittmotortechnik lerne, und übers Programmieren von AVRs. Die gewünschten technischen Daten der Endstufe sind - 10A pro Phase - 120V Spannungsfestigkeit des Endstufenteils, die Endstufe bekommt eine eigene Spannungsversorgung (Logikteil wird mit 24V versorgt und geht extra) - Stromregelung - Stromeinstellung von 1A bis 10A stufenlos oder in 0,2A Schritten geht auch - Verschiedene Schrittmodien Vollschritt, Halbschritt, Viertelschritt, Achtelschritt - Takt/Richtungs- Interface Über die Gefahr der Spannung bin ich mir bewusst, die Testspannung wird natürlich deutlich niedriger ausfallen, nur soviel wie das Labornetzteil hergibt. Die Vollschrittansteuerung eines Sm kenne ich mittlerweile schon, allerdings bin ich mit dem L6506 noch nicht ganz so vertraut, und sicher. Was ich bisher so aus dem Datenblatt herauslesen konnte, war, das dieser Chip speziell für die Regelung des Stroms in den beiden Phasen eines Bipolar Schrittmotors entwickelt wurde. Er arbeitet mit Shuntwiderständen die an der Endstufe den Strom zu einer messbaren Spannung umformen. Und einem Vergleichswert. Daraus erzeugt der Chip dann anscheinend eigenständig eine entsprechende PWM für den Motor. So wie ich das verstehe müsste ich also nurnoch die 4 In-Pins des ICs mit dem µC ansteuern und eine Spannung an die Vergleichswert-Pins geben und den Rest würde dann das IC machen. Meine Hauptfrage währe dazu aber nun wie das mit der Mikroschrittgeschichte funktioniert. Ich habe gelesen das man dafür den Strom in den einzelnen Phasen in einer bestimmten Reihenfolge absenkt und erhöht um so Zwischenschritte hinzubekommen. Das hört sich ja erstmal recht einfach an. Aber durch meine ersten gehversuche mit der Geschichte Schrittmotor habe ich bemerkt das der normale Betriebsmodus schon nicht leicht ist. Dann währe meine nächste Frage zu der Endstufe im spezielleren wie ich die Ansteuerspannung für die Highside-MOSFETs meiner Endstufe am besten extern erzeuge? Der IR2184 hat mit der Bootrtrapschaltung zur Erzeugung der Highsidespannung eine Dutycycle Begrenzung auf 15-85%. Um aber auf die 1A pro Phase zu kommen braucht es weniger wie 15% DC. daher denke ich bräuchte man für die Steuerspannung eine extra Erzeugerschaltung. Ich habe mittlerweile schon nach meinem aktuellen Wissensstand eine Schaltung in Eagle entworfen, bin mir aber noch überhaupt nicht sicher ob diese Schaltung so Funktionieren kann, vor allem fehlt noch die Schaltung zur Erzeugung der Schaltspannung für die Highside-MOSFETs. Da ich auch nicht so vie Erfahrung in der Programmierung mit AVRs habe bin ich mir auch noch nicht sicher ob man mit dieser Pinbelegung zurechtkommen wird. Ich hoffe das ihr mir dabei helfen könnt und am Ende eine anständige Endstufe dabei herauskommt. Wenn alles klappt würde ich das Projekt auch gerne als Opensource-Projekt veröffentlichen. Aber erstmal muss die Geschichte funktionieren. Gruß Michael
Angehängte Dateien:
-

Stepper.png
67 KB
Den Mikroschrittbetrieb macht normalerweise ein spezialisierter Controller. Von einem Teil wie dem L6506 würde ich die Finger lassen. Da gibt es besser integrierte Typen die einem einen Teil der Arbeit abnehmen. Ein Beispiel wäre z.B. der hier: http://www.allegromicro.com/en/Products/Motor-Driver-And-Interface-ICs/Bipolar-Stepper-Motor-Drivers/A4989.aspx Was die Spannung betrifft, würde ich mir das mit den 120V noch einmal gut überlegen. Die meisten Anwendungen kommen mit 12-24V aus. Falls du doch bei 120V bleiben willst, würde mich deine Begründung interessieren. Das ist zum Teil Neugierde, zum Teil Test. ;-) Gruß Reinhard
Hallo Michael! Mit dem L6506 kann man zwar Mikroschrittendstufen aufbauen, aber für die von dir genannten Spannungs- und Strombereiche sollte man auf jeden Fall etwas moderneres nehmen. Der L6506 kann nämlich z.B. keine Mixed-decay Stromregelung [1]. Professionelle Endstufen sind in dem Bereich meistens schon diskret aufgebaut, dazu kommt ein leistungsfähiger uC. Bei 10A und 120V sollte man auch drüber nachdenken, ob eine Strommessung über Shunts noch die richtige Wahl ist. So ein Projekt setzt einiges an Erfahrung voraus. Du solltest vielleicht erstmal mit was kleinerem anfangen. Anhand des Bausatz von meiner HP-Step (L6506, L6203 und ATmega8) kann man die Funktionsweise gut nachvollziehen, der Schaltplan ist ja offengelegt. Die alte Firmware (noch in Assembler) ist ebenfalls frei verfügbar. Ich überlege im Moment, ob ich die aktuellen Sourcen auch noch freigebe... Mit freundlichen Grüßen Thorsten Ostermann [1] http://www.schrittmotor-blog.de/?tag=mixed-decay
Die Begründung für die 120V ist einfach in dem Verhalten der Spule begründet. Ein Schrittmotor der hohe Performance erreichen soll (wie man es gerne bei CNC-Fräsmaschinen haben will) muss natürlich hohe Frequenzen fahren. Wenn man sich den Drehmomentverlauf eines Motors anschaut bei verschiedene Spannungen anschaut, dann sieht man schön das das Drehmoment mit steigender Frequenz abnimmt. Das liegt am Verhalten der Spule, welche durch ihre relativ hohe Induktivität den Strom mit steigeneder Frequenz daran hindert durch den Motor zu fließen. Wenn man nun stat 24V 48V benutzt als Versorgungsspannung bleibt das Drehmoment über die Frequenz länger stabil. Wie gesagt im Fall der CNC-Maschinen benötigt man/ wünscht man sich möglichst hohe Performance um wenig Zeit zwischen den Fräsabschnitten zu verlieren. Im Idealfall sollte die Maschine den Bereich zwischen den Fräsabschnitten ohne großen Zeitverlust überwinden, also quasi "Beamen". Geht aber leider noch nicht!^^ Bei anderen Positionieranwendungen wie beispielsweise Doiserpumpen, etc. gebe ich dir recht dort reichen 24V da der Motor eher langsam bewegt wird, dafür aber kontinuierlich. Das IC von Allegro schaue ich mir später mal an im Moment hab ich keine Zeit dafür. Aber danke für den Link, bin schon gespannt was das alles kann. Was eventuell auchnoch eine wichtige Info währe, die Endstufe soll bei mir schlussendlich mit 96V Versorgungsspannung laufen. Da ich aber weis das man bei Schrittmotoren wenn sie bremsen mit einer Rückspeisung auf die Versorgungsspannung rechnen muss, habe ich die Spannung eine geanze Ecke höher angesetzt. Das war nämlich genau der Punkt der mich bei den Leadshine Endstufen immer genervt hat. Entweder musste man einen Trafo umwickeln um die 80V einigermaßen auszunutzen oder mit 2 Netzteilen Arbeiten die dann 72V ergeben und noch eine Schaltung reinbauen welche die Spannung nicht über 80V kommen lässt, das ganze natürlich noch mit einem Kondensatorpacket verbunden. Gruß Michael
Sorry für den Doppelpost, aber: Reinhard das Allegro solche Chips im Angebot hat wusste ich garnicht. aber danke für den Anstoss in diese Richtung. Das IC welches du verlinkt hast, würde ja eigentlich alle Funktionen abdecken die ich gerne hätte nur die 120V würde es nicht erfüllen. Aber hier muss ich denke ich auch etwas Abstriche machen, ich habe mir das nochmal etwas genauer durchgerechnet mit den Motoren die ich hier noch liegen habe, und selbst mit 48V komme ich bei knapp 1000U/min noch auf ein ausreichendes Drehmoment um keine Schritte zu verlieren. Ich denke ich befolge hier besser Thorstens Rat und fange das ganze erstmal etwas kleiner an. Deine HP-Step habe ich mir übrigens schon angesehen. Hier hatte ich schon den Gedanken einfach alles so zu lassen wie es ist und nur die Endstufe umzubauen auf eine Diskrete Endstufe. Aber nachdem ich nun den Allegrochip gesehen habe, denke ich werde ich mich mit diesem mal näher auseinandersetzten. Ich verweile mich heute abend mal mit dem Datenblatt des Allegro-Chips und mal schauen wie weit ich komme, eventuell entsteht heute abend noch das erste Schematic. Gruß Michael
Mit der Geschwindigkeit hast du Recht. Mir persönlich sind halt noch keine Anwendungen untergekommen wo man mit ~100V einen Stepper betrieben hat, aber das muss nicht viel heißen. Was CNC Maschinen betrifft, denke ich mal ist das mit dem Drehmomentabfall nicht so ein Problem. Dort will man ja entweder viel Kraft oder Drehmoment - es sei denn man fräst Stahl mit dem Schnellvorschub ;-). Was man beim Thema Schrittverlust und hohen Geschwindigkeiten im Auge behalten sollte sind entsprechende Beschleunigungs- und Bremsrampen. Manche ICs integrieren auch das, z.B. Trinamic TMC429 oder ST L6470, aber bei mehrachsigen System ist es vermutlich nicht ganz trivial die synchron zu halten. Gruß Reinhard
Angehängte Dateien:
-

Allegro_A4989.png
37 KB
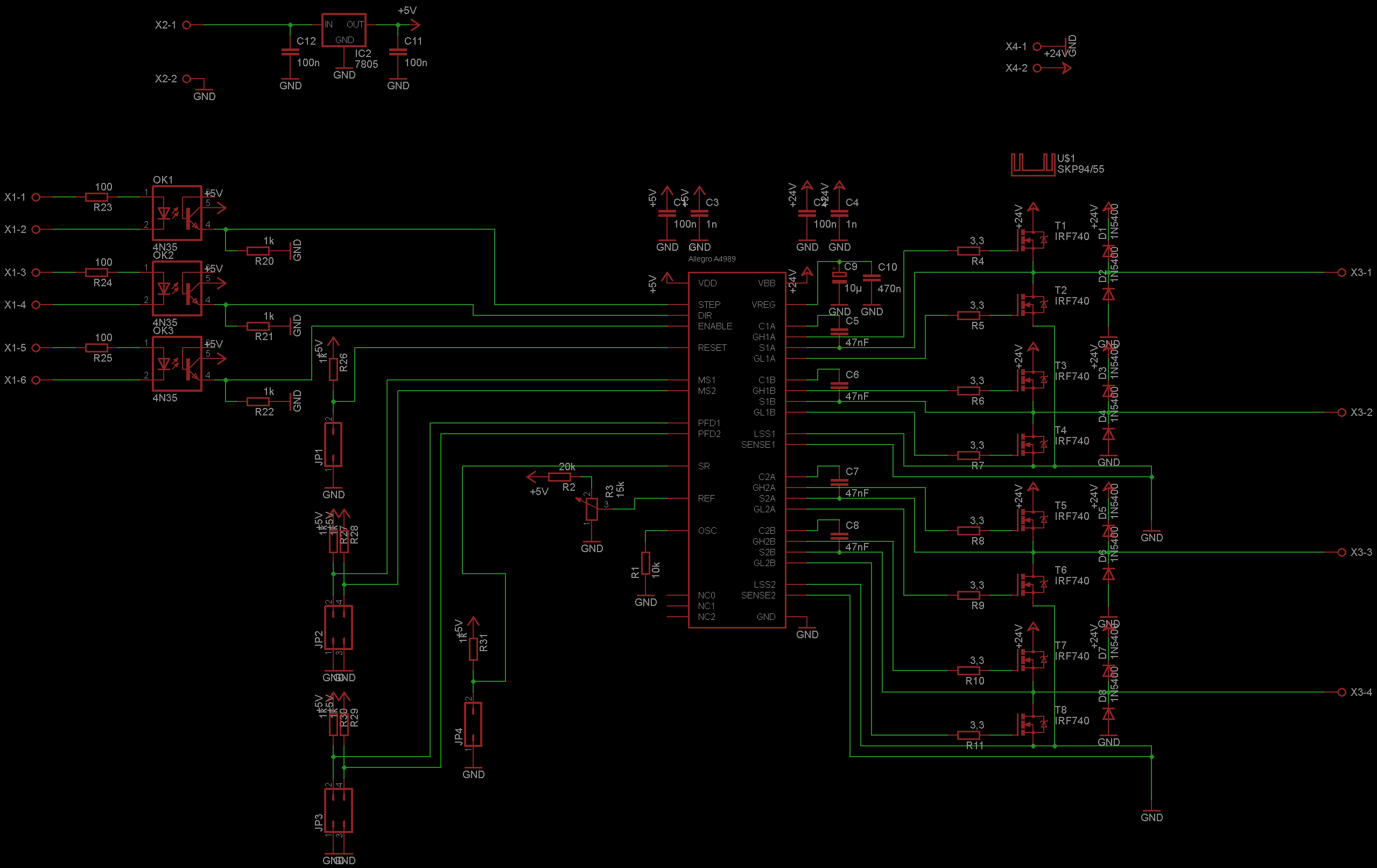
Die Beschleunigungs und Bremsrampen werden im Falle der CNC-Anwendung aber nicht von der Endstufe sondern vom Steuerprogramm generiert, da hier ja eine gewisse Strecke exact zurückgelegt werden will. Natürlich will keiner (und kann auch nicht, es gibt nämlich nur wenige Fräser die das mitmachen und die sind sündhaftteuer ) Stahl im Eilgang schruppen. Beim Eilgang spielt weniger das Drehmoment als die Drehzahl eine Rolle. Hier will man die ganze Mechanik einfach nur schnellstmöglich bewegen. Aber dennoch muss gewährleistet werden das keine Schritte verloren werden, daher ist es manchmal notwendig höhere Spannungen zu nutzen. Vor allem dann wenn man möglichst günstig eine Steuerung aufbauen will und die Messung der zurückgelegten Strecke über die Positionierung des Schrittmotors misst, bzw vorgibt. Geregelt mit einem Glasmessstab währe wiederum der Schrittverlust durch die hohe Geschwindigkeit kein Problem. Wie schon gesagt, ich bleibe nun einfach bei den durch das IC vorgegeben 50V und gut ist es fürs erste. Mittlerweile habe ich schonmal einen Schaltplan aufgesetzt mit diesem IC, ich bin mir allerdings teilweise nicht ganz sicher ob die Berechnungen so stimmen: Datenblatt des geplanten MOSFETs: http://www.datasheetcatalog.net/de/datasheets_pdf/I/R/F/5/IRF540N.shtml Datenblatt des ICs: http://www.allegromicro.com/en/Products/Motor-Driver-And-Interface-ICs/Bipolar-Stepper-Motor-Drivers/A4989.aspx Datenblatt des Optokopplers: http://www.datasheetcatalog.net/de/datasheets_pdf/4/N/3/5/4N35-000E.shtml Den Schaltplan habe ich mal angehängt, ich hoffe mal ich habe keine großartigen Fehler darin. Geplante Werte für die Endstufe: PWM-Frequenz: 25kHz Rosc: 10kOhm Cboot: 47nF Rfet: 3,3Ohm Rshunt: 0,025Ohm Creg: 4,7µF (Hier eventuell mit Elko + Kerko realisiert) Was den Shuntwiederstand angeht muss ich ehrlich sein, ich habe noch keine Ahnung wie ich diesen am Sinnvollsten realisiere. Eine Idee war diesen Widerstand mittels Leiterbahnen auf der Platine zu realisieren, dank ULP ist das bei Eagle ja kein Problem. Die andere Idee war diesen mittels eines Leistungswiderstandes zu realisieren, was aber auch widerum schwirig wird, da es keine 0,025Ohm Widerstände gibt. Habt ihr da einen Vorschlag? Gruß Michael
Hier z.B.: http://de.farnell.com/welwyn/oar3-r025fi/widerstand-1-0r025/dp/1200369 Günstig, relativ induktionsarm (kein gewickelter Drahtwiderstand), genauer und temperaturstabiler als eine Leiterbahn. Gruß Reinhard
Danke Reinhard, den werde ich benutzen. Kannst du eventuell noch etwas zu den Werten sagen die ich hier eingeplant habe ob diese eventuell gefühlsmäßig richtig sind. Wo ich mir aktuell im übrigen noch nicht sicher bin, ist wie ich auf die PWM-Frequenz komme. Als Optimale OSC-Frequenz wird hier 4MHz angegeben, diese habe ich auch so übernommen. Nun habe ich aber keine Angabe gefunden wie ich auf die PWM-Frequenz komme. Hast du da eventuell einen Tipp für mich? Gruß Michael
Nur mal so als Hinweis, dass die Genauigkeit im Mikroschrittbetrieb mit 120V Versorgung um Faktor 5 schlechter wird als bei Betrieb mit 25V. Das Tastverhältnis wird damit so klein, dass schon allein der minimale Dutycycle die Auflösung im Mikroschritt begrenzt.
Danke für den Hinweis Helmut, das ist ein wichtiger Grund gegen die Hohe Versorgungsspannung. Wie ich oben ja schon geschrieben habe werde ich anfangs nicht auf eine solch hohe Versorgungsspannung gehen. Und da du dies nun gesagt hast, werde ich allgemein die Endgültige Versorgungsspannung tiefer ansetzten. Ich denke mit einer Versorgungsspannung von 72V währe man sicher schon gut bedient. Dazu noch etwas Puffer in den Endstufenkomponenten, um die Endstufe beim Abbremsen des Motors nicht zu überlasten. Dann sollten die Komponenten etwa 100V aushalten der Endstufe aber die Maximale Versorgungsspannung sollten bei 72V bleiben, damit ist man dann auf der sicheren Seite mit allem denke ich mal. Gruß Michael
Helmut S. schrieb: > Nur mal so als Hinweis, dass die Genauigkeit im Mikroschrittbetrieb mit > 120V Versorgung um Faktor 5 schlechter wird als bei Betrieb mit 25V. Das > Tastverhältnis wird damit so klein, dass schon allein der minimale > Dutycycle die Auflösung im Mikroschritt begrenzt. Das ist einer der Punkte, die man auf jeden Fall beachten sollte! Um mal ein reales Beispiel zu benutzen: Schrittmotor mit 6A Peakstrom und 0,33R Innenwiderstand hat eine DC-Nennspannung von 6A*0,33R = 2V. Das gilt fürs Fullstepping. Bei 8x Microstepping willst du üblicherweise auf (ganz grob) 1/8 des Peakstroms herunter. Die Nennspannung des Motors ist dann nur noch 2V/8 = 0,25V. Wenn du die Kiste jetzt an 100V betreiben willst, dann brauchst du ein Minimum-Dutycycle von 0,25V/100V = 0,25%! WOW. Bei einem Choppertakt von den von dir vorgeschlagenen 25kHz macht das eine Mindesteinschaltzeit von 0,25% / 25kHz = 100ns. Das ist schon sportlich. Das kannste praktisch ohne Abstriche in der Genauigkeit knicken. Du müsstest innerhalb von 100ns die Brücke umschalten und den Komparator scharf machen. Wenn du allerdings den Motor mit seiner Zuleitung in der Zeit umschalten möchtest, wirst du um heftig dimensionierte Snubber nicht drumherum kommen. Mit so steilen Pulsen regst du dir jegliche noch so kleinen parasitären Komponenten an, die dann fröhlich rumschwingen. Ich bin im Moment (naja, seit einem Jahr bestimmt schon!) an einer sehr ähnlichen Sache dran. Nach dem gefühlten 100. mal komplett neu-designen bin ich dann vom AVR abgegangen und benutze programmierbare Logik für die gesamte Funktionalität. Habe also keinerlei zusätzliche Schrittmotorchips im Design. Die Daten bei mir sind: ca. 1A ... 6A Motorstrom ca. 25V ... 80V Versorgungsspannung (Ich werde 50V benutzen) 8fach Microstepping Mixed Decay Optoisolation Single Supply Ich bin allerdings schon etwas weiter als du :-) Habe hier schon einen Schrittmotor am laufen damit. Wie auch immer, ich will auf ein paar Sachen von dir eingehen. 1. Der "Rundherum"-Kram Du hast im Moment einen Umfang von einer Schaltplanseite für die reine Schrittmotorcontroller-Funktionalität. Der Schaltplan meines Projekts hat mittlerweile um die 10 Seiten. Das Mehr an Seiten ergibt sich durch Dinge, an die man beim ersten Design noch überhaupt nicht denkt: - Eingangsschutzbeschaltung - Übertemperaturschutz - Unterspannungsschutz - Kontrollanzeigen, die den Status der Brücke anzeigen - Bremschopper / Power-Z-Diode an der Versorgungsspannung - Schutz gegen Verpolung der Versorgungsspannung - Snubber an den Brücken - Dicke Bulk-Kondensatoren direkt an den Brücken (superwichtig) - Low-Voltage Netzteil, für die Erzeugung der Logikspannung. - Ein Komparator-Blank-Time Generator - Schutz der Komparatoren vor negativer und zu hoher Sense-R Feedbackspannung. 2. Gate-Treiber Problematik Zu aller erst der von dir angesprochene Punkt mit der Bootstrap-Schaltung. Die Bootstrap Schaltung limitiert dir nur den oberen Duty-Cycle. Das heißt, man kann ungefähr einen DC von 0%-85% fahren. Daraus folgt, dass der Einsatz in Schrittmotortreibern überhaupt kein Problem ist, wenn man im Slow-Decay Modus die beiden Lowside-FETs zum freilaufen benutzt. Einzig kritisch wird es, wenn die oberen MOSFETs für längere Zeit eingeschaltet bleiben müssen (zum Beispiel weil gerade ein Schritt-Impuls eingetroffen ist und der Strom des Motors hochgefahren werden muss). Dies ist üblicherweise aber nur für maximal ein paar Millisekunden der Fall. Weiterhin benötigst du einen Gate-Treiber, der einen Versatz zwischen Logikseite und MOSFET-Seite vertragen kann. Ich hatte zu erst HIP4080A geplant, die mir allerdings zu teuer waren. 2A Peak-Gatestrom sind auch schon eine Menge Holz, wenn man ein wenig auf die MOSFET Gate Charge achtet. Im Moment bin ich mit dem IR2110N ganz zufrieden, auch wenn der schon Verzögerungszeiten im 100ns Bereich hat (leider). Einen anderen tauglichen Gate-Treiber habe ich noch nicht gefunden. Deine Verschaltung der IR2184 wird so nicht zufriedenstellend funktionieren, da der Gatestrom der Lowside FETs mit durch den Shunt-R fließen muss (Stromschleife LO -> Gate -> Source -> Shunt-R -> GND -> COM). Der Weg, den der Strom zurücklegen muss - und damit die parasitäre Induktivität - ist riesig! Totales NoGo. Deine einzige Chance ist es, den COM Pin des IR2184 direkt mit den Sources der Lowside-FETs zu verbinden. Problem ist allerdings, dass dann gleichzeitig die Logikmasse "schwimmt" und die Pegel am Eingang nicht mehr stimmen. Was ebenfalls fatalerweise fehlt, ist eine entsprechende Abblockung der Versorgungsspannung des IR2184. Die Energie, die zum Nachladezeitpunkt in die Bootstrapschaltung fließt muss irgendwo niederimpedant herkommen. Eine 1N4007 ist außerdem viel zu langsam um den Bootstrap-Kondensator nachladen zu können. Nehm hier mindestens eine 1N4148 oder eine UF4003. Irgendwas schnelles auf jeden Fall. Die Z-Dioden an den Gates würde ich mir sparen. Bei richtigem Layout sind die überflüssig. Und achja: IRF740 MOSFETs wirst du nie im Leben schnell genug geschaltet bekommen um auf 100ns Min-Dutycycle zu kommen. Das habe ich schon mit IRF530 probiert ;-) Das gibt eine ganz fiese Sauerei. 3. H-Brücken Der Shunt-Widerstand muss mit unbedingt(!) ein niederinduktiver Widerstand sein. Hier bieten sich Metalloxidschichtwiderstände an. Benutze keinesfalls Drahtwiderstände. Die Abblockung der Brücke ist ein schlechter Scherz. Das wird dir so irgendwann um die Ohren fliegen, wenn es denn funktioniert. Wie schon oben erwähnt fehlen dicke Bulk-Caps an der Versorgungsspannung, die die Freilaufenergie des Motors aufnehmen können und falls der Schrittmotor in Bewegung ist, den nötigen Wechselstrom an die Brücken liefern können. Was außerdem noch fehlt sind Kondensatoren, die direkt an die Brücke kommen. Auch wenn dein Sense-R ein niederinduktiver Typ ist, besitzt er dennoch eine Induktivität. Schaltet eine Halbbrücke jetzt innerhalb von wenigen hundert Nanosekunden um, geht die Stromänderungsrate di/dt extrem in die Höhe. Leider ist die Spannung an einer Induktivität mit U = L di/dt bestimmt. Das bedeutet, dass an dem Sense-R im Umschaltzeitpunkt kurzzeitig eine hohe Spannungsspitze zu sehen ist, die der Versorgungsspannung entgegengesetzt ist -> Die Spannung an deiner Brücke bricht zusammen. Deshalb müssen hier kleine Keramik oder Folienkondensatoren direkt an die Brückenversorgungsspannung angeschlossen werden, damit die steile Stromflanke am Sense-R abgeflacht wird. 4. Layout Schaltplan schön und gut. Der Schaltplan ist nur eine notwendige Voraussetzung für das Funktionieren der Schaltung, aber keine Hinreichende! (Schreib dir das hinter die Ohren ;-)) Das Layout der Schaltung ist daher essentiell und dort gibt es soo unfassbar viele Sachen, die man beachten muss. Das kann man textuell in einem Post gar nicht zusammenfassen. Dafür braucht man Erfahrung und muss mit seinem Blick auf das Layout schon im Kopf automatisch die parasitären Komponenten einblenden können. Je extremer die Anforderungen (di/dt, du/dt) werden, desto wichtiger wird es, die parasitären Komponenten der Schaltung zu beachten. Wie auch immer, mal ein paar Faustregeln: a) Stromschleifen, die einen schnell veränderlichen und hohen Strom tragen, müssen so klein wie möglich bleiben. Oft geht es nicht anders, weil die physikalische Größe der Bauelemente (z.B. die Bulk Elkos) da nicht mitmachen. Aber als Faustregel ist das die Nummer 1. Solche Stromschleifen können sein: - Alles rundherum um die H-Brücken - Gate-Source Ansteuerungsleitungen - Versorgungsspannung der MOSFET Treiber (hier fließt kurzzeitig mal das eine oder andere Amperchen!) - usw. b) Digitalmasse und Power-Masse "trennen"! "Trennen" bedeutet nicht, diese nur an einer Stelle mit einem dünnen Steg zu verbinden, sondern darauf zu achten, ob es Stromschleifen im Hochstromteil gibt, die im Digitalteil verlaufen KÖNNTEN (und es auch tun werden, egal was der Layouter sich gedacht hat ;-)). Sowas muss absolut vermieden werden. Als weiterer Punkt ist (besonders bei 10A Phasenstrom) darauf zu achten, dass die Leiterbahnen breit genug sind. Bei den angesprochenen 10A Dauerstrom (d.h. die Leiterbahnen, an denen der Motor angeschlossen wird) würde ich mit ca. 5mm Breite veranschlagen. Wenn du dünner werden willst, musst du nachrechnen. Breiter schadet nie. Leiterbahnen, die den Motorstrom immer nur für Bruchteile der Zeit den maximalen Motorstrom tragen müssen, können auch dünner sein. 5. Entwicklungszeugs Unterschätze den Aufwand einer solchen Entwicklungsarbeit nicht. Wie gesagt, ich sitze an meinem Projekt mittlerweile ca. 1 Jahr, wobei ich hauptsächlich in meiner Freizeit dran arbeite und nicht ganztags. Mittlerweile bin ich bei Rev. E angekommen, die, so wie es aussieht, die vorerst finale Version sein wird. In den Versionen davor kämpfst du noch mit kleinen Problemchen und Ärgernissen, besonders im Bereich der Ausgangsbrücken. Ohne eine enorme Erfahrung in dem Gebiet, braucht man ein Weilchen bis man die optimale Position der Bauelemente gefunden hat. Besonders bei so "harten" Umschaltzeiten, wie du sie forderst, wird das kein Spaß werden. Da du deine Anforderungen gegenüber meinen noch mal um Einiges hochgeschraubt hast, wirst du eine Menge Zeit und Nerven und vor allem Geld investieren müssen. Eine solche Schaltung prototypt man nicht auf dem BreadBoard, sondern auf einer realen Platine. Du wirst also ein paar Prototypen-Boards herstellen müssen. Ich habe bei meinem Projekt bewusst einseitige Leiterkarten als Design-Ziel angenommen (was besonders im Hochstrombereich einem nicht gerade das Leben versüßt), da ich diese selbst herstellen kann um hier wenigstens ein paar Kosten einzusparen. Aber die Prototypen müssen auch mit Bauteilen bestückt werden und bei dem, was du vor hast landest du am Ende bei mindestens 50€ Bauteilkosten pro Prototyp. Noch ein Tipp: Lies Datenblätter. Ich habe zu Anfang auch bei fast 0 gestartet (was Schrittmotoren angeht). Geholfen haben mir u.A. - Datenblätter der Trinamic Schrittmotor ICs - Appnotes von STM zu ihren Schrittmotor ICs - Appnotes von IRF.com zu den Gate-Treibern und MOSFETs - Datenblätter und Appnotes von Allegro Wie auch immer, dieser Post soll keinesfalls eine vollstände Abhandlung über das Thema sein, sondern nur eine Sammlung der Sachen, die während meiner Entwicklungsphase aufgefallen sind. Es kann gut sein, dass ich noch wesentliche Sachen vergessen habe.
ein sportliches Vorhaben. Ich habe gerade die neuen THB6064AH auf dem Tisch liegen. Aber meine CNC soll ja auch nicht fliegen, fräsen reicht mir.
Stephan Henning schrieb: > ein sportliches Vorhaben. Auf jeden Fall. > Ich habe gerade die neuen THB6064AH auf dem Tisch liegen. > Aber meine CNC soll ja auch nicht fliegen, fräsen reicht mir. Ja, für Käsefräsen reicht sowas ja auch. Trotzdem gibt es Berechtigung für Schaltungen mit mehr Power, die diskret aufgebaut werden (müssen).
Simon K. schrieb: > Stephan Henning schrieb: >> ein sportliches Vorhaben. > Auf jeden Fall. > >> Ich habe gerade die neuen THB6064AH auf dem Tisch liegen. >> Aber meine CNC soll ja auch nicht fliegen, fräsen reicht mir. > Ja, für Käsefräsen reicht sowas ja auch. > Trotzdem gibt es Berechtigung für Schaltungen mit mehr Power, die > diskret aufgebaut werden (müssen). ohne Frage. Wobei das ja eigentlich schon das Einsatzgebiet eines Servos ist.
Fuer einen hochdynamischen Antrieb verwendet man bevorzugt Scheibenlaeufer. Die haetten dann Glasmasstaebe als Ruckfuehrung.
Uiuiuiuiiiii Simon da bist du ja schon ein Lichtjahr weiter als ich. Solangsam kristallisiert sich hier immer weiter heraus, das meine "Vorgaben für mich" anscheinend etwas arg über meinen derzeitigen Fähigkeiten liegen. Daher denke ich sollte ich diese wohl etwas reduzieren um in einem Rahmen zu bleiben welcher ich noch bewältigen kann. Mein vorrangiges Ziel ist es natürlich ein funktionierende Schrittmotorkarte zu bauen. Ich reduziere mal das ganze auf folgende Ziele: - 10A/48V Endstufe - Endstufe soll mit ihrer Spannungsfestigkeit bei etwa 75V liegen - Vollschritt - Stufenlos einstellbarer Strom von 1A bis 10A - 20kHz möglicher Eingangstakt - Takt/Richtung/Enable - Interface - Optisch isolierte Eingänge Das sollte für mich zu schaffen sein, hoffe ich. Versorgt soll die Karte mit 2 Spannungen werden, um die Endstufe und die Logik spannungstechnisch zu trennen. Simon, die wichtigen Schaltungsteile die bei mir aktuell noch fehlen die du aufgezählt hast werde ich versuchen einzubauen. Da sich die Ansprüche vorerst mal reduziert haben werde ich nun mal dementsprechend eine Endstufe zu planen die diesen Vorganben entspricht. Vielen dank dir nochmals Simon für die vielen Informationen. Gruß Michael
Den Text von Simon kann ich 100% unterschreiben, besser hätte ich es nicht ausdrücken können. Ich weiß, dass man beim Selberbauen viel lernt, trotzdem würde ich and Deiner Stelle überlegen, was Dir wichtiger ist, viel Lehrgeld zu bezahlen oder gleich was Fertiges zu kaufen. Die Endstufen von http://www.rta-deutschland.de/rta_de/prod.htm sind recht gut und noch bezahlbar und treffen genau Deine Wünsche
eProfi, das mit den gekauften Endstufen habe ich schon hinter mir. Für meine CNC habe ich schon die Endstufen von Leadshine (Typ: AM882) im Betrieb. Es ist ansich alles schön und gut, sie funktionieren einwandfrei, und waren auch ohne Probleme installiert. ABER!!!! So ein gutes Stück kostet mal eben um die 120€ und kann nur 8,2A Peak! Das mag ja alles irgendwo seine Gründe haben, aber für mein kommendes Projekt brauche ich nicht 3 oder 4 Endstufen, was sich noch im bezahlbaren Bereich bewegen würde sonder einige mehr. Und genau hier liegt der Hund begraben, wenn ich mir nämlich die Endstufen kaufe und pro Endstufe sagen wir 100€ auf den Tisch lege, und für eine Selbstgebaute Endstufe die mit Abstrichen in der Funktionalität soweit auch das gleiche tut. Dann kann ich einige Prototypen bauen bis ich vom Materialwert in den Bereich komme wo es sich gelohnt hätte die fertigen zu kaufen. Und RTA ist in der Leistungsklasse ähnlich teuer. Da brauche ich nicht zu schauen. Und zum zweiten ist das ganze immernoch Hobby, und wie die Definition von Hobby lautet sollte jeder wissen.Und dann muss es nicht in 1 Monat laufen, da gibts keinen Termindruck, etc. Wenn es läuft dann läufts. Fertig. Und was den Lerneffekt angeht, der ist auch von nicht unerheblichen Faktor. Sprich fertige kaufen ist keine Option für mich. Gruß Michael
Beim besten Willen, über die 120€ kommst du sehr schnell beim Eigenbau ;-) Aber das Hobbyargument zieht natürlich. Das sind ähnliche Gründe, wie bei mir.
wie heist es auf DMAX? Zitat: " Hobby ist mit dem größmöglichen Aufwand den kleinstmöglichen Nutzen zu erzielen" Zitat Ende. In diesem Sinne, frohes Geldversenken :-))
Angehängte Dateien:
-

Stepperendstufe_V1.3.png
72 KB
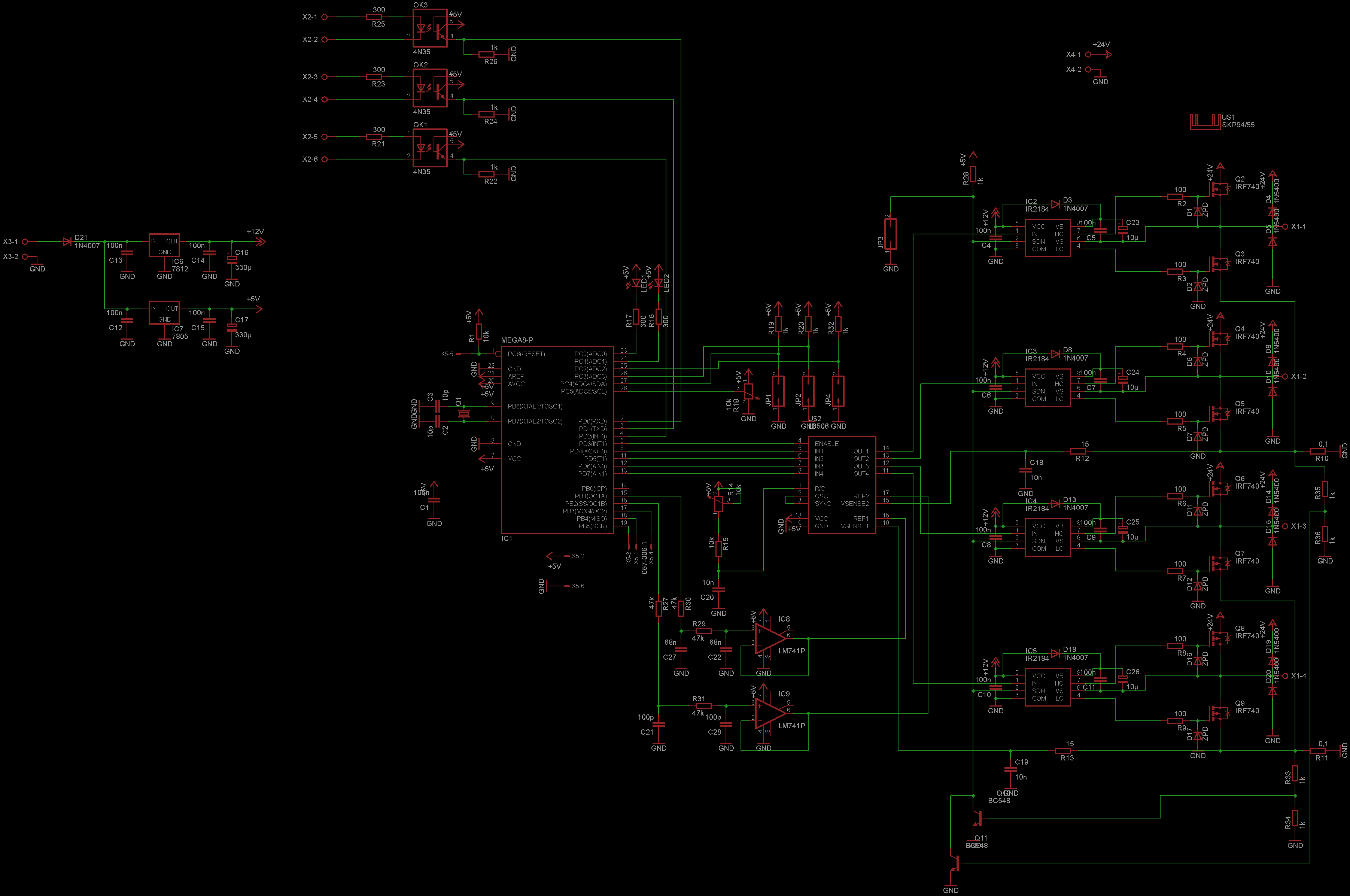
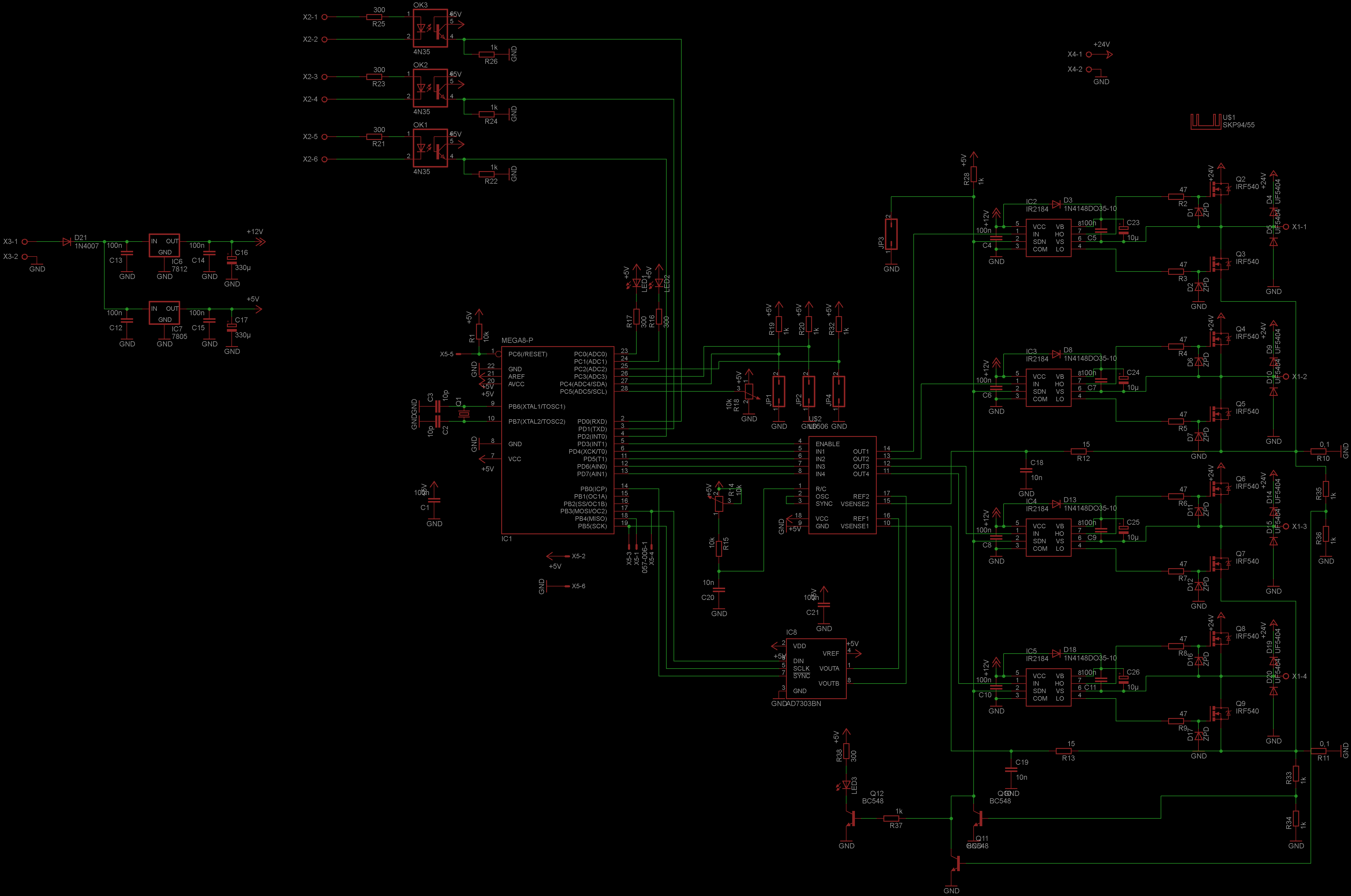
Stephan, ich werd meinen Spass dabei haben, und beim nächsten Projekt das ähnlich ist spare ich mir dann das Lehrgeld durch die Erfahrung dieses Projekt. Von daher sehe ich das als Lehrgeld und nicht als Geld verschenkt. Und spätestens wenn ich auf die Technikerschule gehe bringt mir solche Erfahrung sicher auch wieder etwas. Simon, genau deshalb mache ich das ja, und aus keinem anderen Grund, einfach nur weils mein Hobby is, auch wenn ich kein Eletrkoingeneuer bin kann ich doch einiges zusammenfrickeln. Vielleicht auch nicht immer hundertprozentig aber immer so das es meinen Anforderungen genügt. So ich habe mittlerweile einen Schaltplan für euch. Sieht sehr ähnlich dem ganz oben gezeigten aus, da er auch aus dieser Schaltung resultiert. Als Vorlage wurde teilweise die HP-Step benutzt, allerdings habe ich erstmal einige Sachen weggelassen. Die Endstufe wird bei mir nicht geschützt, da es für mich erstmal zuviel Aufwand ist. Und das für die erste Fassung der Schaltung erstmal unwichtig ist. Es fehlt auchnoch einiges was Simon noch geschrieben hat, das habe ich noch nicht integriert. Mir gehts es ersteinmal Grundlegend um die Funtkion, kann diese Schaltung so wie sie hier gezeigt wird funktionieren? Und wenn nein, wo liegt der Fehler? Vorraussetzung ist natürlich ein Funktionierendes Programm, davon gehen wir hier mal aus. Und was mir noch wichtig währe, wenn schon jemand mit der PWM als Gleichspannungsquelle gearbeitet hat, kann er eventuell mal beschrieben wie sein Filter aussieht. Den ich habe hier einfach mal einen aktiven Filter zweiter Ordnung eingebaut, und um eine Dekade die Grenzfrequenz gesenkt. Gruß Michael
Was ist den los, will mir keiner mehr helfen?
IRF740 und 1N5400/1N4007 sind nicht geeignet für PWM, LM741 sind keine single supply OpAmps, und 1.4V am Strommesshunt abfallen zu lassen ist sportlich, sind immerhin 20 Watt für die 14A Endstufe bevor sie abschaltet. Gut finde ich, daß die Überlasterkennung direkt auf die Treiber wirkt.
Weiterhin wirst du immer noch Probleme mit den Logikpegeln an den IR2184 bekommen. EDIT: Nein quatsch, in der Variante wirst du eben Probleme mit den Gate-Drive Strömen bekommen. Hab da gerade was verdreht im Kopf. Ansonsten, bau es doch einfach auf und schau ob der magische Rauch entweicht. ;-) MaWin schrieb: > Gut finde ich, daß die Überlasterkennung direkt auf die Treiber wirkt. Stimmt. Finde ich auch geschickt gelöst. Überleg gerade ob das nicht auch noch was für meine Schaltung nützlich sein könnte.
Mawin, da hatte ich garnichtmehr dran gedacht, die OPs müssen raus, ich hab den Filter mal simuliert, das kann ich vergessen. Da muss wie bei der HP-Step irgend ein DA-Wandler rein. Die Gatewiderstände sind demnach wohl zu groß, oder? Die 14A fließen nur im Falle eines Kurzschluss durch den Shunt, im normalen Betrieb geht das max bis 10A was 10W währen. Und das ist ein Leistungswiderstand mit 10W geplant, das Symbol ist allerdings das der normalen 0207 Widerstände. Ich war zu faul ein anderes zu zeichnen.:-D Und ich bin gerade am überlegen die Überlasterkennung etwas "schärfer" einzustellen, sodass sie bei 12A schon anspringt. 1N4007 wird noch ausgetauscht durch die 1N4148, 1N5400 bin ich noch am suchen nach einer Alternative. Und die MOSFETs sind nur als Platzhalter ich hatte bisher dafür die IRF540N eingesetzt, die haben da schön gewerkelt soweit. Pingleich und Bauformgleich sind sie ja. Gruß Michael
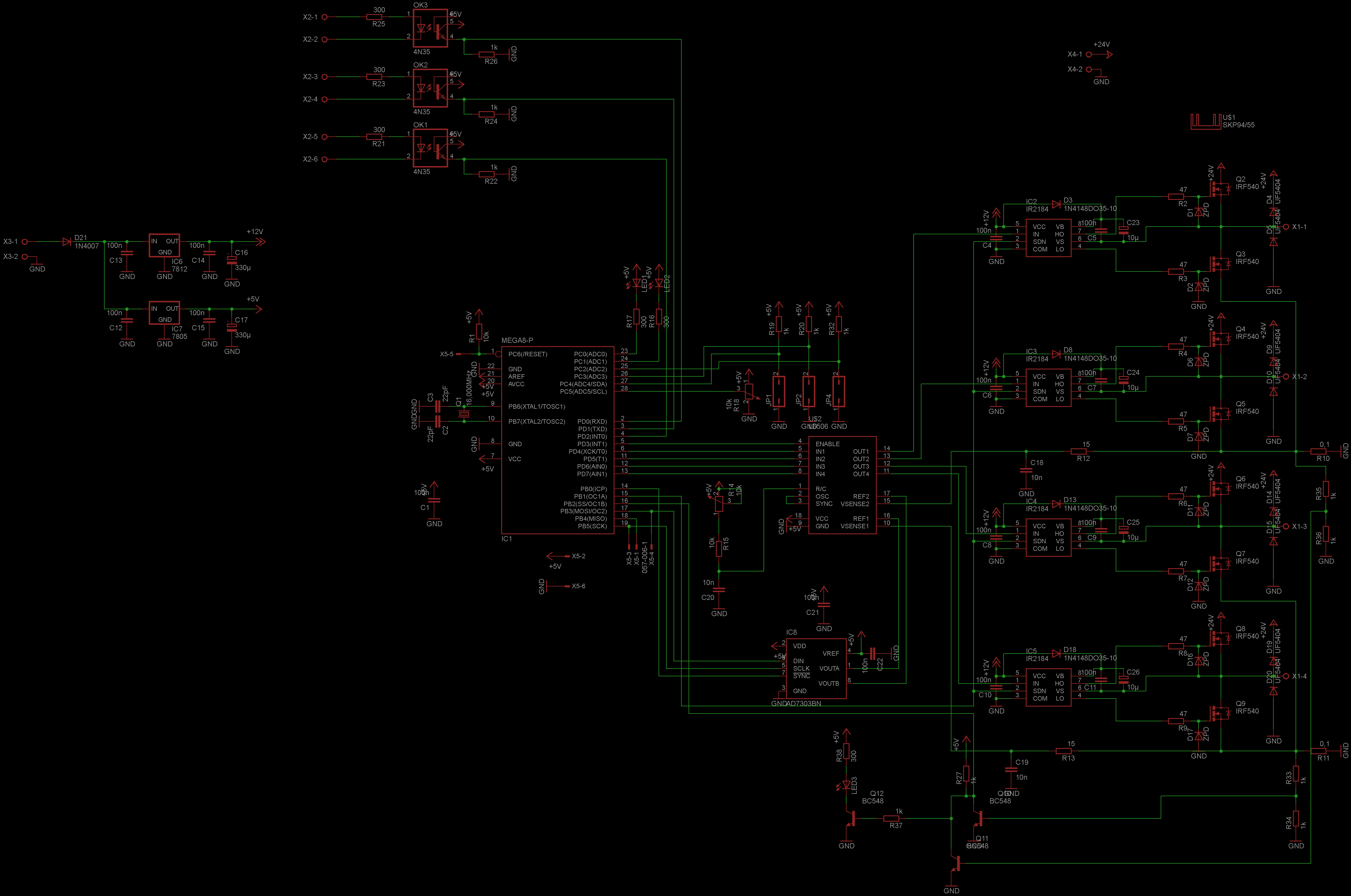
So, ich hab die Verbesserungsvorschläge von euch einfließen lassen: - Die Schutzdioden in der Endstufe wurden von 1N5400 zu UF5404 getauscht. Das sind nun nichtmehr die trägen Gleichrichterdioden, sondern sehr schnelle Gleichrichterdioden. Damit sollte die Endstufe besser geschützt sein. - Die langsamen Bootstrap-Dioden 1N4007 wurden durch die Schottky-Diode 1N4148 getauscht, jetzt sollte die Bootstrap-Schaltung der Endstufentreiber auch besser funktionieren - Die Endstufentransistoren habe ich aktualisiert von IRF740 auf IRF540. Die verbaue ich auch wirklich - Die DA-Wandlung habe ich nun geänder, von der PWM-DA-Wandlung mit Filtern zu einer Wandlung mit dem IC AD7303B. Dieses wird mittels SPI angesteuert, und erledigt die DA-Wandlung komplett alleine. es muss nur Konfiguriert werden und mit Datengefüttert werden. Simon, mir ist leider nicht ganz klar was du meinst mit den den Gate-drive Strömen. Die 100Ohm haben sich bei anderen Endstufen schon bewährt. Daher halte ich diese eigentlich für in Ordnung. Ich hoffe mal das das mit dem AD7303 klappt, den viel Platz habe ich leider nichtmehr auf der Platine. Das ist jetzt mal nur ein DAC mit 8bit Auflösung, sollte eigentlich reichen. Ich denke so lässt sich das ganze eigentlich realisieren. Die Schaltung gleicht der HP-step soweit schon arg, von den Funktionsbausteinen ist sie gleich. Jetzt fehlt an sich nurnoch die Software. Da werde ich mich heute dran machen. Aber schaut euch trotzdem mal den Schaltplan an, falls noch irgendwelche Fehler etc. zu sehen sind, bitte anmeckern.
Michael Blöser schrieb: > Simon, mir ist leider nicht ganz klar was du meinst mit den den > Gate-drive Strömen. Die 100Ohm haben sich bei anderen Endstufen schon > bewährt. Daher halte ich diese eigentlich für in Ordnung. Wie oben geschrieben: Zeichne dir die Stromschleife beim Laden/Entladen des MOSFET-Gates ein und du wirst sehen, dass die aufgespannte Fläche der Stromschleife relativ groß ist. Die MOSFET-Regel Nummer 1 ist jedoch immer, die Größe DIESER Schleife zu minimieren, um die parasitäre Induktivität gering zu halten.
Simon, kann sein das ich mich gerade etwas dämlich anstelle, aber kannst du mir das bitte erklären, was du meinst
Angehängte Dateien:
-

Clipboard02.png
19 KB
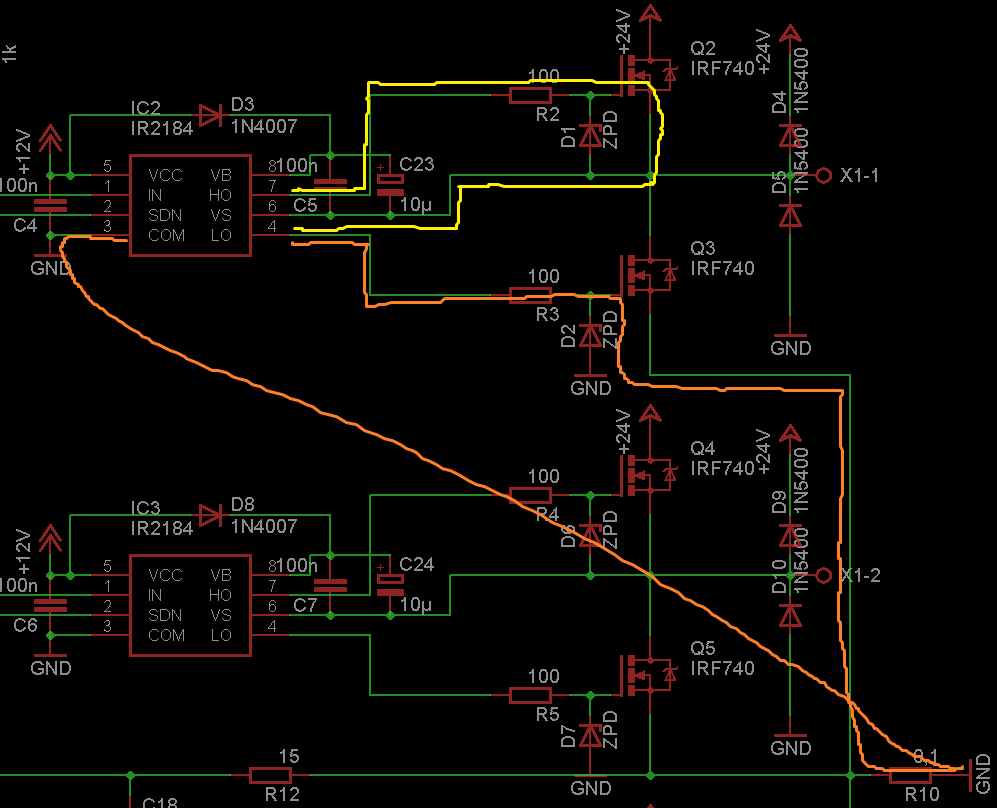
Wo ist das Problem? Einfach das machen, was ich geschrieben hab. Da sieht man schon, dass der Gatestrom des unteren MOSFETs mit durch den (parasitär induktiven) Sense-R fließen muss. Wenn du die gleichen Stromschleifen mal nachher im Platinenlayout einzeichnest, siehst du auch, dass die Gate-Source-Stromschleife für den unteren MOSFET riesig ist. Und genau das ist eben das, was man nicht will! (!!!) Die parasitäre Induktivität fängt mit der Gate-Kapazität an zu schwingen. Außerdem fängt die Stromschleife mit sehr großer Fläche sich ganz leicht Störungen ein.
Achso meinst du das, ja okay, das heist die Leitungen die hier gezogen werden sollten möglichst kurz werden, um das Aufschwingen zu verhindern. Und der Gatewiderstand sollte vermutlich auch entsprechend ausgelegt sein, das dies nicht passieren kann. Mal noch was anderes, wie errechnte man den Gatewiderstand? Ich habe das hier einfach mal als RC-Glied mit Spannung VS+12 angenommen, stimmt das oder liege ich da vollkommen danebe? Gruß Michael
Es gibt nicht den Gatewiderstand. Der ist ein Kompromiss aus Schaltgeschwindigkeit und erzeugter EMI. Prinzip: Je schneller du schaltest, desto problematischer wird die ganze Geschichte. So schnell wie nötig, so langsam wie möglich. Die Schaltgeschwindigkeit kannst du ungefähr über Q = I * t, mit I = Udriver/Rgate herausfinden.
Danke, das werde ich tun. Gut wenn das soweit geklärt währe. Die Software für den Vollschritt Modus steht mittlerweile soweit, denke ich, nur bei der SPI Geschichte bin ich mir noch nicht sicher. Gruß Michael
Angehängte Dateien:
Sooo, ich habe eure Verbesserungsvorschläge nun einmal einfließen lassen, unter anderem habe ich den DAC durch einen Externen DAC-Baustein getauscht. Hier würde ich euch bitte den Anschluss an den µC doch bitte mal kurz zu checken, da ich SPI noch nie benutzt habe, und ich mich hier einfach mal nach dem Datasheet des Atmels gehalten habe, aber ob ich da alles richtig verstanden habe weis ich nicht 100%ig. Daher die bitte das zu prüfen. Damit währe die Funktionstechnische Gleicheit zur HP-Step hergestellt!^^ Thorsten, du hattest recht prinzipjell hätte ich auch eine aufgebohrte HP-Step benutzen können!^^ Was die Programmierung der SPI-Geschichte angeht, da müsst ihr mir auch ein bischen helfen, wie gesagt habe ich SPI noch nie eingesetzt. Ich habe mich soweit es zeitlich möglich war darüber informiert, und werde nun mal versuchen das ganze so zu programmieren das es auch soweit funktioniert. Gruß Michael
Reinhard R. schrieb: > Mir persönlich sind halt noch > keine Anwendungen untergekommen wo man mit ~100V einen Stepper betrieben > hat, aber das muss nicht viel heißen. Mir ist auch noch kein solcher Motor begegnet, aber in unserem aktuellen Projekt verwenden wir zwei Schrittmotoren von Orientalmotor, die mit der gleichgerichteten Netzspannung (JA, ~320V) arbeiten.
Nun, auch mein Senf dazu. Aus aktuellem Anlass :-) Ich bin auch einzig mit der Motivation, etwas zu lernen, herangegangen. Mittlerweile habe ich die dritte Revision der Endstufe hier aufgebaut... Aus meiner Erfahrung damit: (1) Die Sache mit der Stromschleife zum Laden und Entladen der FET-Gates kann man nicht oft genug unterschreiben. Günstig ist, wenn das Bezugspotential schwimmen kann, etwa durch optische Kopplung. Hast du ja. Und günstig ist dann, wenn der Shunt nicht zu groß ist, damit das Potential der Low-Seite dir nicht zu weit entgegenkommt. Wenn die Versorgung der Gate-Treiber dann nämlich hoch genug ist, kannst du den Gate-Treiber mit seinem Masse-Anschluss nämlich direkt an Source des FET klemmen (der Treiber wird dann auch über den Shunt mitversorgt). Darum sollte die Versorgung der Gate-Treiber eben hoch genug sein, dann macht es vernachlässigbar wenig, wenn die Masse des Treibers zur Versorgung hochwandert, weil der Strom durch den Shunt steigt. Im Gegenzug dafür hast du die besagte Stromschleife aber deutlich verkleinert. Die Entkopplung der Treiber ist jetzt aber noch wichtiger: (2) Entsprechend, warum bläst du die Entkopplung der Gate-Treiber nicht mal auf? 10u-Tantal dazu. Ich habe bei meiner Endstufe die Gate-Treiber diskret aufgebaut und wollts auch nicht wahrhaben... (3) Beim angepeilten Nennstrom würde ich die Freilaufdioden größer auslegen. Wenn du Vollschritt- oder Wellenmodus fährst, und die Motorwicklungen tatsächlich in der Periodendauer auf 10 Ampère aufgeladen bekommst, dann wird das mit 3A im Mittel etwas eng. Zumindest löte sie gescheit ein, also Beinchen stehen lassen und so. (4) Die 'Strombegrenzung' solltest du neu auslegen. Du versuchst da irgendwie, die intrinsische Basis-Emitter-Spannung als Referenz zu verbauen. Das ist an sich nicht optimal, weil die insbesondere mit der Temperatur wegläuft. Dazu noch sind die Transistoren da schlimmstenfalls im gesättigten Betrieb, je nachdem, wie schnell die Treiber abgeschaltet werden. Dadurch werden die Transistoren aber laaaahm. Die Brühe habe ich bei meiner ersten Karte auch gesoffen. Da wurden die Transistoren so lahm, dass es für mehr als 180° Phasenverschiebung gereicht hat und die Endstufe dann mit 4 Ampère im Schrittmotor irgendwo auf Langwelle auf Sendung ging. Bring die Transistoren wenigstens mal in Kollektorschaltung oder so. Oder noch besser, verbau schnelle Komparatoren. (5) Aref am AVR wird in der Regel nicht mit Vcc verbunden. Wenn du nämlich so intern auf 2,5V-Referenz schaltest, gibts nen kurzen. Da gehört nur ein Kondensator nach Masse dran. (6) AVCC am AVR versorgst du am besten übern LC-Glied aus VCC. (7) Stimmen die 10p als Last für den Quarz am AVR? Erscheint mir wenig -> Datenblatt. Deine Anforderung mit 20kHz-Schritttakt solltest du dann noch konkretisieren. Mikroschritt ok, aber 20kHz Vollschritt ist für den typischen Schrittmotor mit 200 Schritten/Umdrehung Käse. Das wären mal eben 100 Umdrehungen in der Sekunde -- kannst dir an drei Fingern abzählen, was dann noch an Drehmoment über bleibt. Viel Erfolg :-)
Sven P. schrieb: > Aus meiner Erfahrung damit: > (1) Die Sache mit der Stromschleife zum Laden und Entladen der FET-Gates > kann man nicht oft genug unterschreiben. Günstig ist, wenn das > Bezugspotential schwimmen kann, etwa durch optische Kopplung. Gut dass du mir zustimmst. Der IR2110 (den ich verwendete) erlaubt bis zu +/-5V Offset am Lowside FET-Source. Die Logikmasse des Chips bleibt ganz normal mit GND verbunden. Mit optischer Kopplung (direkt vor dem Treiber!) geht das auch, aber ... > Hast du > ja. Hat er? Nur ganz vorne am Eingang. > Und günstig ist dann, wenn der Shunt nicht zu groß ist, damit das > Potential der Low-Seite dir nicht zu weit entgegenkommt. Das sollte praktisch nie der Fall sein. Außer durch Induktivitäten. Da helfen aber dann die Abblockkondensatoren. > Wenn die Versorgung der Gate-Treiber dann nämlich hoch genug ist, kannst > du den Gate-Treiber mit seinem Masse-Anschluss nämlich direkt an > Source des FET klemmen (der Treiber wird dann auch über den Shunt > mitversorgt). > Darum sollte die Versorgung der Gate-Treiber eben hoch genug sein, dann > macht es vernachlässigbar wenig, wenn die Masse des Treibers zur > Versorgung hochwandert, weil der Strom durch den Shunt steigt. Im > Gegenzug dafür hast du die besagte Stromschleife aber deutlich > verkleinert. Wie ich oben schon geschrieben habe, bezieht sich die Eingangsspannung des Treibers auf COM! Wenn COM nun wandert, dann wandern die Schaltschwellen am Eingang des Treibers(!!). Das geht vollends in die Hose so! > Die Entkopplung der Treiber ist jetzt aber noch wichtiger: Absolut. > (2) Entsprechend, warum bläst du die Entkopplung der Gate-Treiber nicht > mal auf? 10u-Tantal dazu. Ich habe bei meiner Endstufe die Gate-Treiber > diskret aufgebaut und wollts auch nicht wahrhaben... Ich habe bei mir beispielsweise nur 4,7µF/25V keramisch vorgesehen. Das geht ganz gut. 100nF + 10µF Elko geht aber auch. Der Kondensator sollte aber mindestens 10 mal größer sein, als der Bootstrap Kondensator, da der ja hieraus nachgeladen werden muss. > (3) Beim angepeilten Nennstrom würde ich die Freilaufdioden größer > auslegen. Wenn du Vollschritt- oder Wellenmodus fährst, und die > Motorwicklungen tatsächlich in der Periodendauer auf 10 Ampère > aufgeladen bekommst, dann wird das mit 3A im Mittel etwas eng. Zumindest > löte sie gescheit ein, also Beinchen stehen lassen und so. Er verwendet aktiven Freilauf, so wie es aussieht. Da sollten die Dioden nie leitend werden. Ich würde sie sogar ganz weglassen. > (4) Die 'Strombegrenzung' solltest du neu auslegen. Du versuchst da > irgendwie, die intrinsische Basis-Emitter-Spannung als Referenz zu > verbauen. Das ist nur der Überstromschutz. Der eigentliche Vergleich geht über den Ansteuer-IC in der Mitte, wo auch die Treiber angeschlossen sind. > (5) Aref am AVR wird in der Regel nicht mit Vcc verbunden. Wenn du > nämlich so intern auf 2,5V-Referenz schaltest, gibts nen kurzen. Da > gehört nur ein Kondensator nach Masse dran. Wohl wahr. > (6) AVCC am AVR versorgst du am besten übern LC-Glied aus VCC. Halte ich auch für sinnvoll bei der Anwendung.
Sven, ich hangel mich mal morgen nach der Arbeit genauer durch deine Punkte und verbessere meine Schaltung dementsprechend. Jetzt versuche ich nur mal soweit zu beantworten wie es um diese Uhrzeit noch möglich ist. Zu 1) Der Shunt soll bei maximalem Strom nur eine Spannung von 1V erzeugen, was von den 12 V Versorgung für den Treiber noch 11V Schaltspannung währe für den MOSFET. Ich gebe zu das wird wenig, ich schaue morgen mal ob ich hier nicht einen 7815 verbauen sollte, dann habe ich immernoch deutlich über 12V selbst wenn ich 10A abverlange. Aber was du mit dem Schwimmen der Bezugsspannung der MOSFETs sagst, da muss ich mir mal noch ein paar Gedanken machen. Zu 2) Die Bootstrapkondis sind ja schon bei 10µF + 100n aber wo ich dir Recht gebe, die Kerkos an der Versorgungsspannung sind etwas klein. Schau ich morgen danach. Zu 3) Die Dioden werden genau so eingebaut, sodass sie von allen Seiten gut belüftet sind. Aber ansich sollten sie nicht großartig gebraucht werden. Die Dioden sind hauptsächlich zur Entlastung der MOSFET-Dioden, und um schnelle Schaltspitzen abzufangen. Aber du hast Recht, eigentlich sind sie zu klein dimensioniert. Zu 4) Der Transistor soll eigentlich nur die Endstufe vor einem Kurzschluss schützen, da sonst der magische Rauch, ... :-) . Ja, also die Strombegrenzung ist nur grob auf etwas zwischen 12 und 14A ausgelegt. Danach sollte die Strombegrenzung einschreiten um schlimmeres zu verhindern. Genau muss die Begrenzung nicht sein, daher habe ich das so gelöst. Wo ich aber nacharbeiten muss, ist der Fall wenn die Begrenzung einschreitet, da muss ich noch ein RS-FF einbauen welche die Endstufe ausgeschaltet lässt. Schau ich morgen aber ebenfalls danach. Was du mit dem Langwellensender schreibst, sowas möchte ich natürlich nicht. Da muss ich mal schauen ob sowas bei meiner Karte möglich ist, aber durch ein RS-FF am Ausgang der Strombegrenzung sollte das eigentlich gegessen sein, denke ich mal. Zu 5) wird geändert, Danke für die Info Zu 6) wird ebenfalls geändert. Zu 7) fast sind glaube ich 12pF oder so, aber die 10pF funktionieren auch sauber und ohne Probleme, und die habe ich gerade liegen. Werde ich aber auch ändern, ich muss eh noch Material bestellen, dann bestelle ich diesen gleich mit. Wie schon gesagt, ich arbeite morgen abend deinen Post mal durch und korregiere mein Design soweit durch. Solangsam werde ich denke ich nicht mehr mit einer Eurokarte auskommen. Eigentlich wollte ich das ganze ja schön auf einer Eurokarte lassen. Aber anscheinend wird daraus nix. Gruß Michael
Michael Blöser schrieb: > Zu 7) fast sind glaube ich 12pF oder so, aber die 10pF funktionieren > auch sauber und ohne Probleme, und die habe ich gerade liegen. Da täuscht dich dein Glaube. Tausende von ATmega8 laufen mit 22pF. Dazu kommt noch ein bisschen vom Layout. Da würde ich trotzdem keine große Zeichnung oder ansonsten mal einen Blick ins Datenblatt vom Quarz werfen.
Simon K. schrieb: > Wie ich oben schon geschrieben habe, bezieht sich die Eingangsspannung > des Treibers auf COM! Wenn COM nun wandert, dann wandern die > Schaltschwellen am Eingang des Treibers(!!). Das geht vollends in die > Hose so! Jein, die wandern ja nur in eine Richtung. Und zwar wandern die bei zunehmendem Strom durch den Shunt auf Vcc zu. Wenn über dem Shunt mehr Spannung abfällt, dann liegt COM des Gatetreibers höher als Logik-Masse. Vcc des Gatetreibers bleibt, wo es war. Will die Logik einen High-Pegel liefern, so ist das unproblematisch. Will die Logik einen Low-Pegel, so landet der um den Spannungsabfall über dem Shunt unter dem COM des Gatetreibers. Das ist mit den 5V erlaubten Offset wohl auch unproblematisch. Dazu noch ist der Steuereingang des Treibers mit internem Pull-Down bestückt, sodass man ihn mit einem Open-Drain nach Vcc ansteuern kann. Dann stimmt der Low-Pegel auch. > Er verwendet aktiven Freilauf, so wie es aussieht. Da sollten die Dioden > nie leitend werden. Ich würde sie sogar ganz weglassen. Vorausgesetzt, die Ansteuerung versagt nicht. Etwa, weil sie durch die Strombegrenzung abgeschaltet wird...
@Sven. P. Ich stimme dir in beiden Sachen zu!
Angehängte Dateien:
So, ich hatte Zeit weiterzumachen: - Den Quarz sowie die beiden Kondensatoren habe ich mit den richtigen Werten versehen. - Den Schwingkreis der Überstromerkennung habe ich eliminiert (blöder Fehler von mir, hätte ich ja eigentlich gleich sehen können!!!!) Im Anhang der neue Schaltplan. Das Problem der Geschichte mit den Logikpegeln für die Treiber habe ich soweit verstanden, aber wie kann man das umgehen? Mir fällt gerade leider nichts dazu ein wie man den Low-Pegel entsprechend auf das schwimmende Nievau des Treibers bekommt. Gruß Michael
Michael Blöser schrieb: > Im Anhang der neue Schaltplan. Versuch doch mal, einen weissen Hintergrund einzustellen.
Angehängte Dateien:
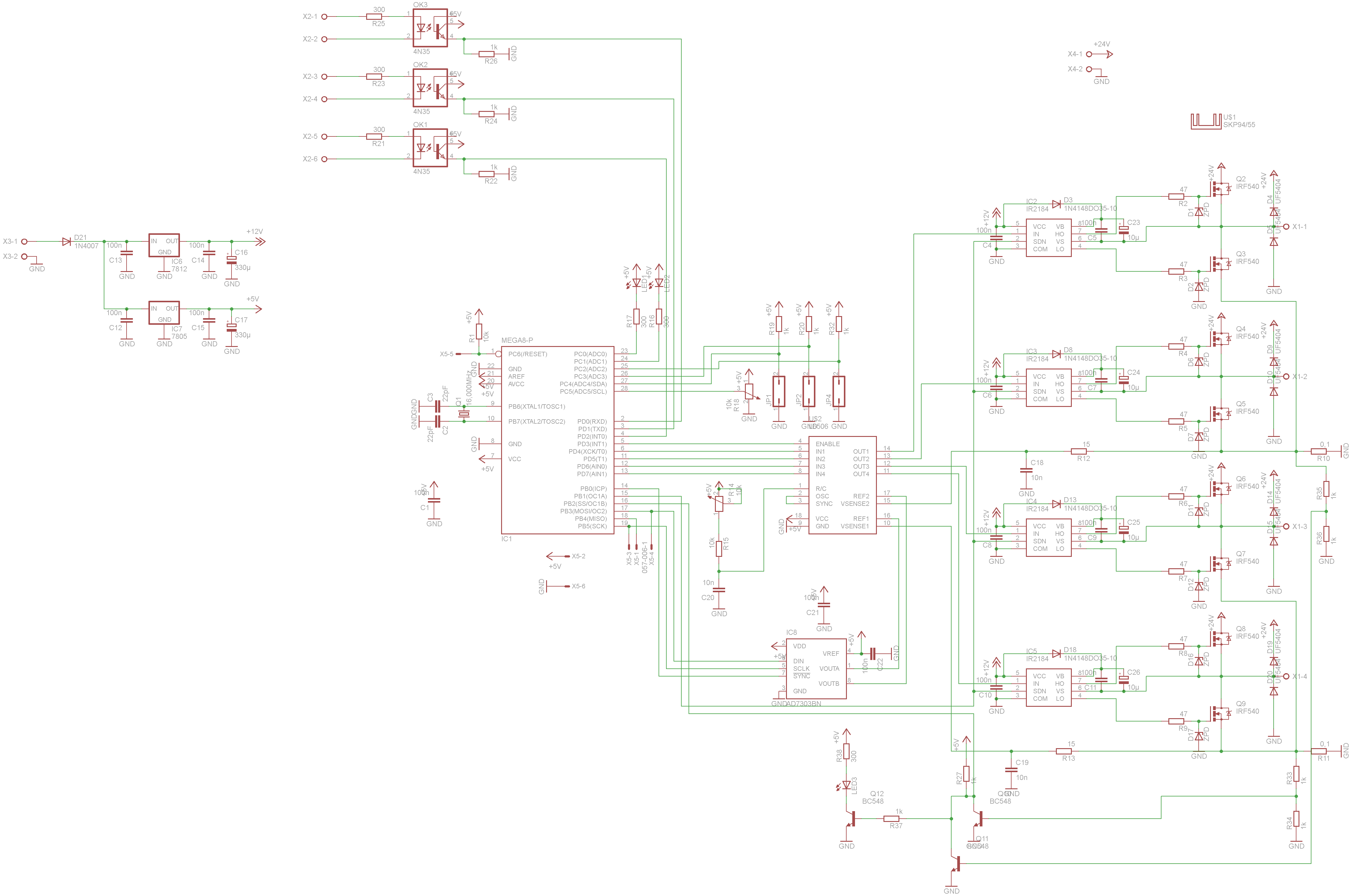
Wenn es auch hilft bei ansehen des Plans, ich krieg da Augenkrebs mit dem weißen Hintergrund. Is aber Geschmackssache denke ich. Gruß Michael
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.