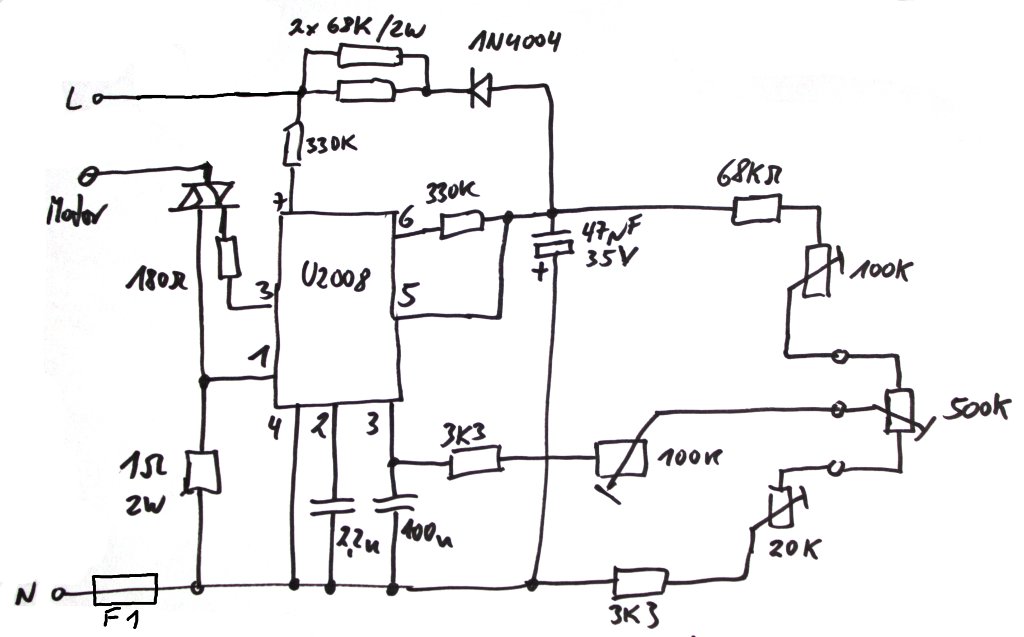

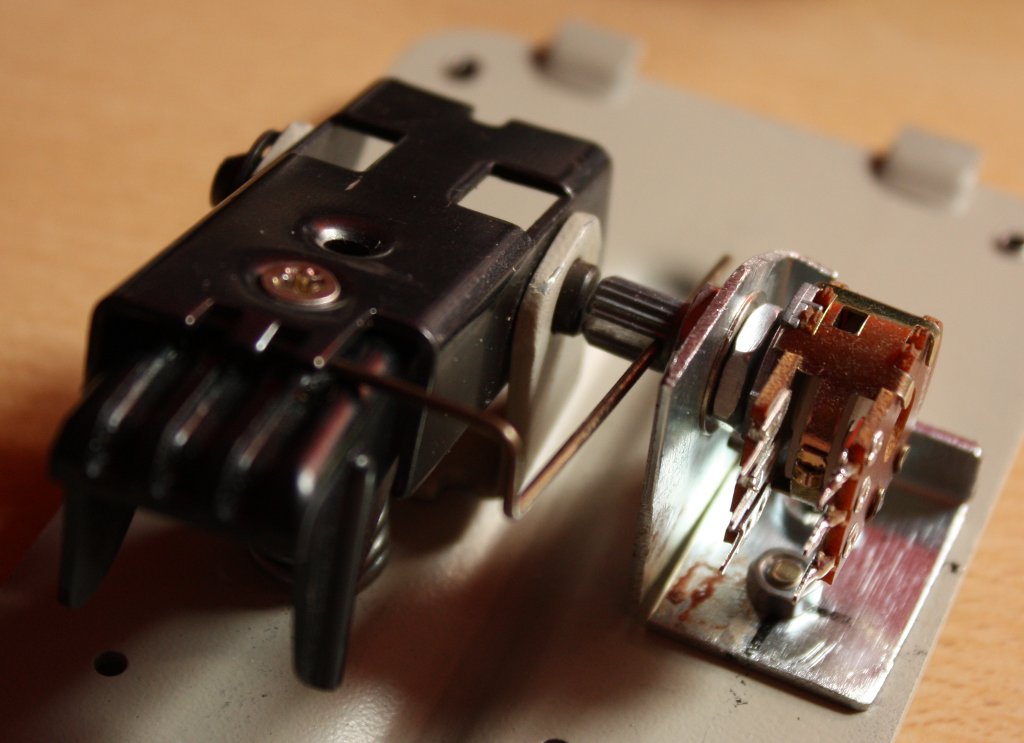
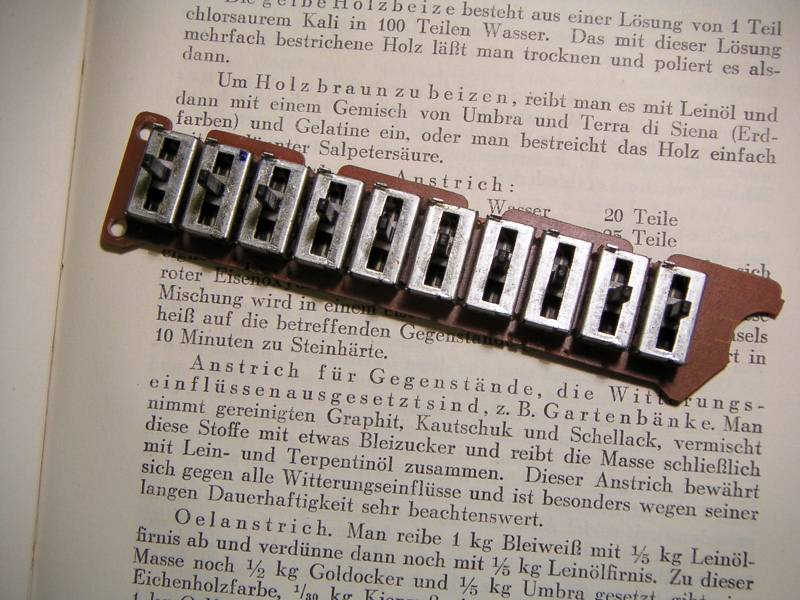
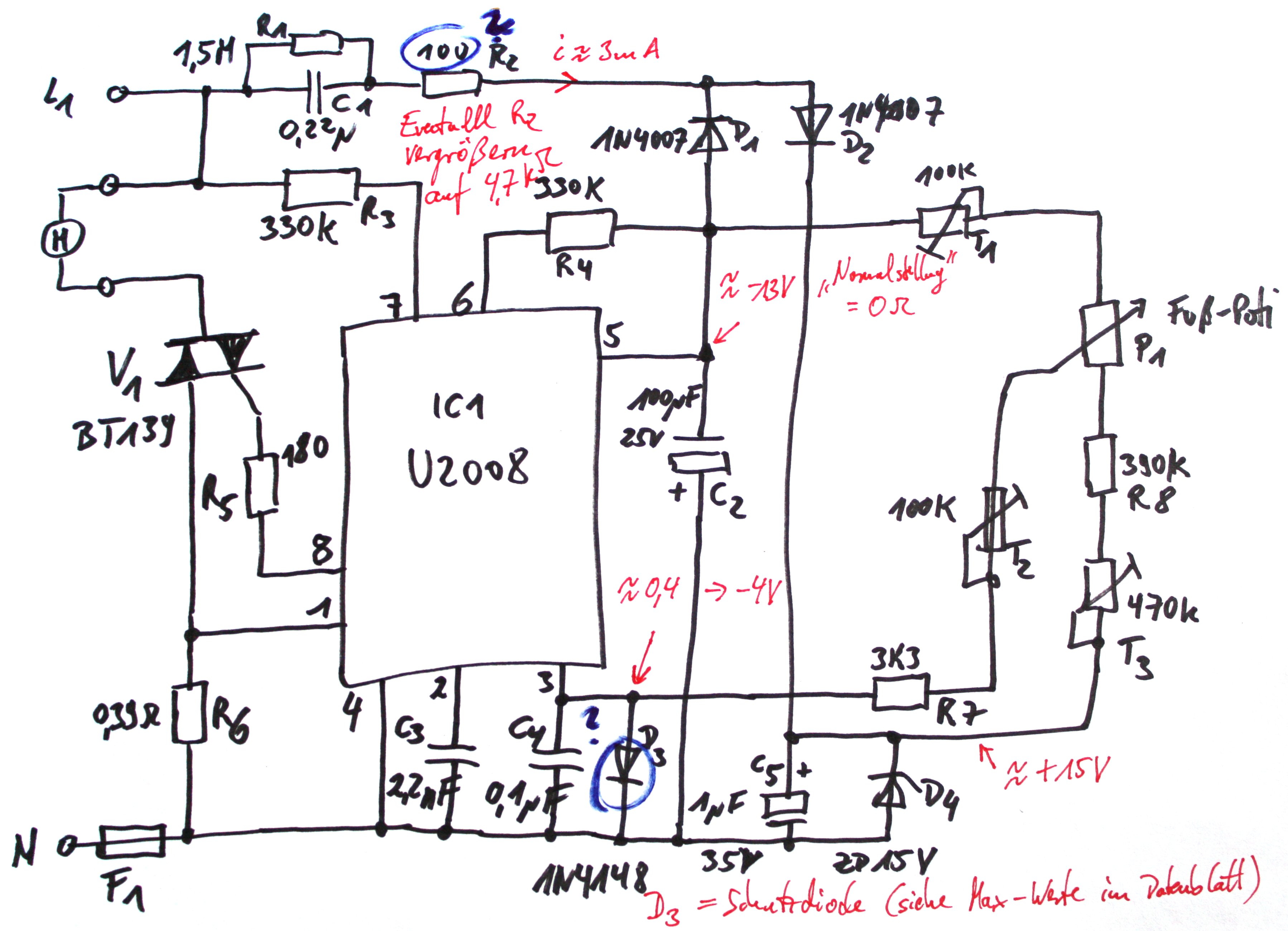
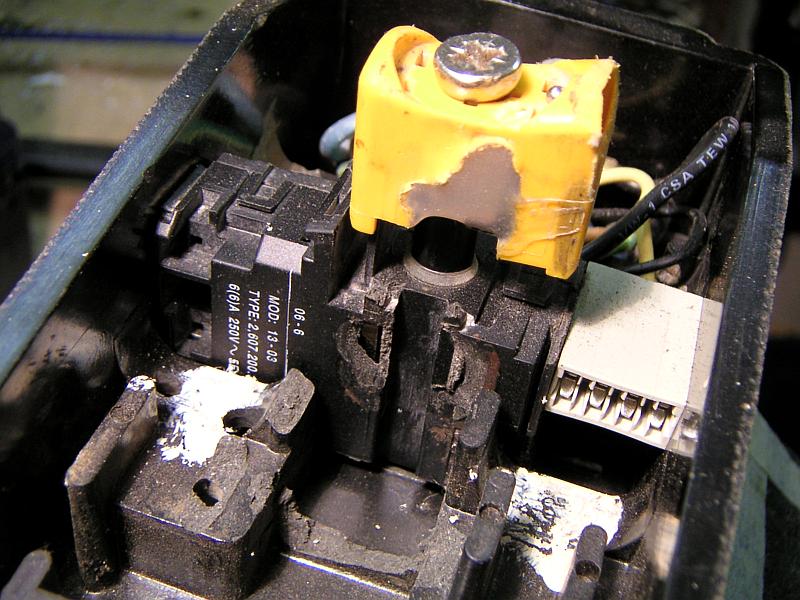
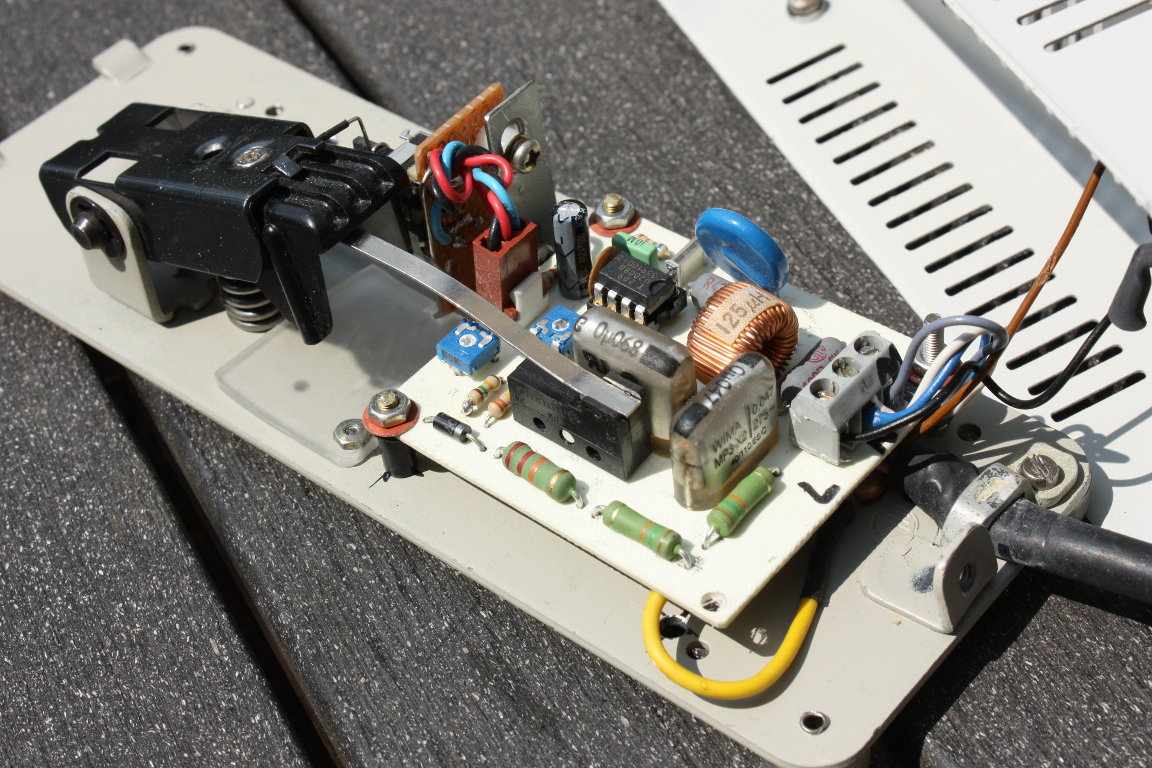
Hallo zusammen, letzte Woche habe ich auf dem Sperrmüll eine alte Pfaff 96 gefunden. Die Maschine funktionierte soweit wieder nachdem ich die Mechanik geölt habe. Dann hat der Entstörfilter (X-Y-Kondensatoren) am Motor mit einer schönen Rauchwolke und unter Auslösung der Sicherung, den Geist aufgegeben. Da die Maschine schon etwas älter ist verwundert das auch nicht weiter. Den Filter habe ich durch einen ähnlichen Filter ersetzt. Nun habe ich gleichzeitig begonnen die "Elektronik" im Fußpedal durch eine Phasenanschnittsteuerung zu ersetzten. Die Alte Elektronik bestand aus einer Schlaterserie, gekoppelt mit einem Widerstand, mit mehreren Anzapfungen. Beim herunter treten des Pedals verringert sich der Widerstand. Das gesamte Gebilde hat folgende Widerstandswerte: Undendlich, 590Ohm, 492Ohm, 423Ohm, 333Ohm, 238Ohm, 139Ohm, 0 Ohm Den Motor habe ich ausgemessen: Wicklungswiderstand ca. 180Ohm, Stromaufnahme bei 240V ca. 22mA Auf der Maschine steht eine Lesitungsaufnahme von 80W, bei einer 15W Glühbirne als Beleuchtung. Ich gehe mal davon aus das in den 80W die Glühbirne enthalten ist, bleiben also noch 65W für den Motor. Bei der gemessenen Stromaufnahme komme ich rechnerisch aber nur auf 6W. Wie erklärt sich die Differenz zu den 65W aus dem Typenschild? Gemessen habe ich Spannung und Strom mit einem einfachen Digitalmultimeter. Als Phasenanschnittsteuerung habe ich den U2008 ausgewählt, davon habe ich hier noch ein paar herum liegen. Der Thyristor ist ein BT139/800. Der ist sicherlich viel zu groß, lag aber auch noch hier herum. Im wesentlichen funktioniert die Schaltung. Ich kann die Geschwindigkeit des Motors einstellen. Ich habe aber noch zwei Probleme, zu denen ich gerne Eure Meinung hören würde. 1.) Der Motor läuft nicht regelmäßig. Ich vermute das liegt an der falsch dimensionierter Laststromregelung. Ich habe einen 1 Ohm Widerstand ein gebaut. Möglicherweise ist der zu groß. Allerdings bin ich mir unsicher wie der Widerstand berechnet werden muss. Wenn ich meine Messwerte vom Motor in die Formel aus dem Datenblatt des U2008 einsetze kommt da ein Wert von ca. 4 kOhm heraus. Das kann nicht sein. Der Motor läuft dann sicherlich nicht mehr. Die Messungen an der alten Elektronik zeigen das der größte Widerstand von 560 Ohm zu ganz langsamen Lauf des Motors führt. Ich werde im nächsten Schritt den 1 Ohm Widerstand verkleinern. Habt Ihr bessere Lösungsideen? 2.) Ich komme mit dem Regelbereich des Potentiometers nicht hin. Das hat mit den mechanischen Gegebenheiten des Fußpedals zu tun. Das Pedal kann in einem Winkel von ca. 15 Grad "durchgetreten" werden. Das Poti hat aber ca 270 Grad bei voller Ausnutzung des Potiweges. Zunächst habe ich versuch mechanisch eine Übersetzung zu bauen um den Potiweg besser nutzen zu können. Leider entstehen durch eine Übersetzung solche Kräfte, das meine Konstruktionen nicht sicher funktionieren. Ich habe hier Kunststoffzahnräder ausprobiert. Wenn ich kräftig auf das Pedal trete "springen" die Zähne über, darum habe ich den Weg wieder verworfen und verwende jetzt eine ganz einfache, mechanische Lösung (siehe Bild). Leider mit der bekannten Einschränkung bezüglich des Drehwinkels. Mir Fällt für diesen Punkt nur eine relativ Aufwändige Lösung ein bei der ich den Nullpunkt verschiebe und das Signal vom Poti verstärke. Das könnte ich mit einem Op-Amp machen. Dann könnte ich denn Nullpunkt und den Vollausschlag justieren und eventuell noch einen "Normal-" und "Kriech-gang" Umschalter einbauen. Gibt es eine einfachere Lösung als einen OP zu nehmen? Für den OP müsste ich sicherlich auch die Spannungsversorgung aufwändiger gestalten ...
Angehängte Dateien:
-

neue-motor-steuerung.jpg
78 KB -

altes-fusspedal-2.jpg
110 KB -

fusspedal-neues-poti-3.jpg
97 KB
Wolfgang Heinemann schrieb: > 2.) Ich komme mit dem Regelbereich des Potentiometers nicht hin.7 Kannst Du nicht einfach die alte Schaltmechanik mit ca um den Faktor 100 grösseren Widerständen verwenden? Gruss Harald PS: Früher gab es sogenannte Feintriebe, spezielle Planetengetriebe zur Montage an Potis mit einer Übersetzung von etwa 6:1. Vielleicht kann man die auch umgekehrt einbauen.
Hallo Harald, Danke für Deine Denkanstöße. Ich möchte aber ja gerade von der "diskreten" Schaltung zu einer linearen Einstellung der Geschwindigkeit kommen. Diese Planetengetriebe kenne ich noch von früher, die wurden gerne genutzt um die Frequenz an einem Tranceiver besser einstellen zu können. So etwas habe ich hier leider nicht herum liegen. Ich glaube auch das das Problem der Kräfteübersetzung dann immernoch da wäre. Mein erster Test ohne Potentiometer war auch ganz ok, da gab es halt noch keine bremsende Kraft. Das Poti habe ich schon mit Kriechöl bearbeitet, das geht jetzt sehr leicht, trotzdem geht es noch zu schwer. Ich denke mal das es mit dem aktuellen, mechanisch einfachen, Aufbau funktionieren muss. Ich muss nur den Nullpunkt verschieben, damit ich weit genug "herunter" komme und durch Anpassen des Widerstandsverhältnisses (68k + 100kPoti in Reihe) zum Stellpoti müsste auch der obere Bereich gedehnt werden können. Im Moment skizziere ich eine geänderte Spannungsversorgung, das Poste ich gleich mal mit Bitte um Kommentar.
Angehängte Dateien:
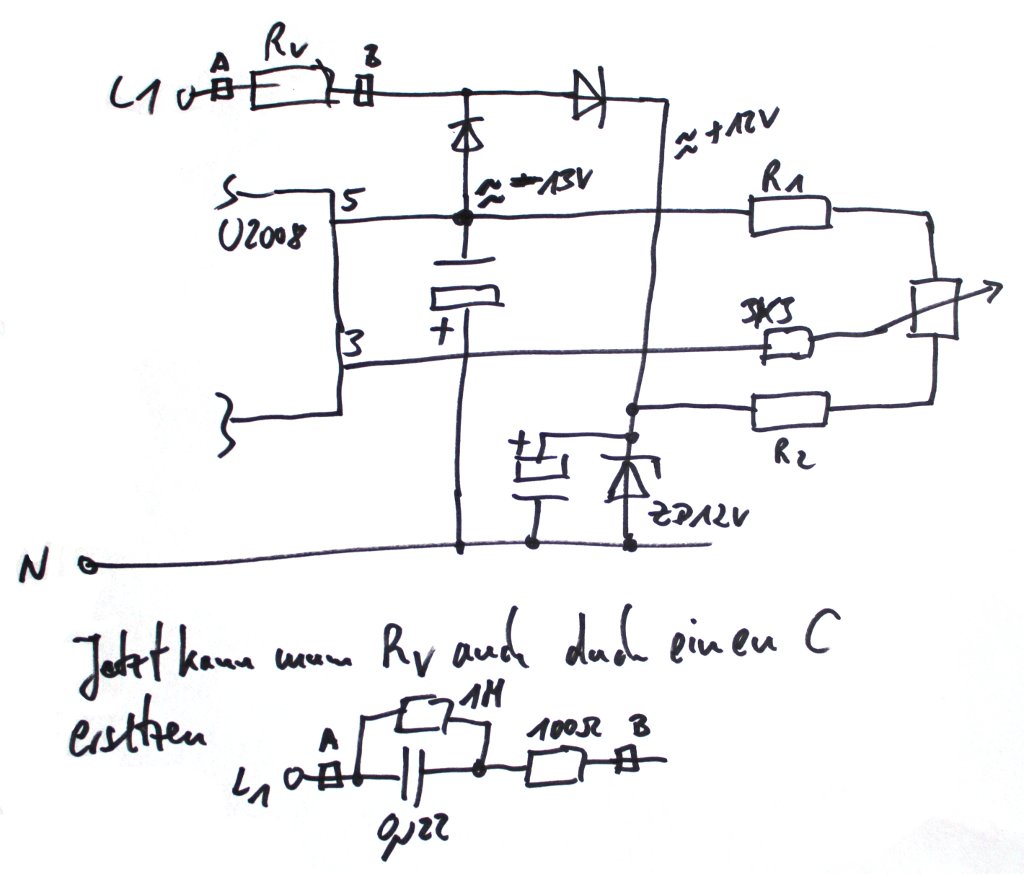
So, hier meine Anpassung damit der Nullpunkt nach unten verschoben werden kann. Der U2008 wird ja mit einer negativen Spannung von ca. 13V betrieben. Ich möchte jetzt noch eine zusätzliche positive Spannung von ca. 12V erzeugen, die ich dann an das Poti lege. Die genauen Werte muss ich noch ausrechnen, damit auch kein Bauteil überlastet wird. Besonders die 12V Zener-Diode muss genug Verlustleistung ab können.
Angehängte Dateien:
-

Versuch1.png
1,4 KB
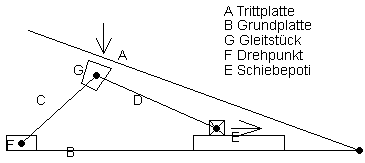
Ich habe hier solch einen etwas moderneren "Trapper" für eine Nähmaschine. Da wird durch die Bewegung der Fussplatte ein Hebel C gedreht, der über ein Gleitstück den Schleifer eines Linearpoti E verschiebt. Die Übersetzung ist etwas 1:3. Das Linarpoti hat etwa 40mm Schiebeweg, 50 kOhm, linear.
Hi Peter, ahhhh ... darauf bin nicht nicht gekommen. Ich habe hier zwar ein Schiebepoti, das ist aber mechanisch recht groß. Ich hatte gedacht ich könnte es direkt an das Pedal hängen und herunter drücken lassen, dafür ist es aber zu lang. Über eine solche Mechanik könnte ich es liegend montieren. Ich muss mal eben durch rechnen ob das Ding in das Gehäause passt und welchen Schiebeweg ich erreichen kann. Das Pedal hat, wie gesagt ca. 15 Grad Drehwinkel. An der höchsten Stelle macht es dann zwischen 1cm und 2cm Weg. Mal sehen ob meine Trigonometriekenntnisse dafür noch ausreichen ;-) Danke !
Wolfgang Heinemann schrieb: > Hi Peter, > ahhhh ... darauf bin nicht nicht gekommen. Ich ja auch nicht. Erst beim Reparieren hab ich die Mechanik gesehen und bestaunt. Meine Trigonometriekenntnisse sind auch schon etwas verschimmelt. Da hilft nur eine maßstäbliche Skizze in den beiden Endstellunge der Platte A. Ich vermute: nur mit einem Poti mit kurzem Hub, also so 40mm, wird das klappen. Auch muss man drauf achten, dass der Hebel C nicht senkrecht zu A stehen darf. Sonst ist er eine massive Stütze: Die Platte A klemmt dann.
Hallo Peter, leider hat das Poti einen Hub von 80mm. Ich könnte das gerade so einbauen, mit den mechanischen Abmessungen. Leider habe ich am Ende nur einen Fahrweg von ca. 15mm. Das gibt mir keinen Vorteil gegenüber meine Potilösung ... schade. Kleinere Schiebepotis habe ich nicht. Es gibt da zwar noch eines aus einem alten Transistorradio aber das Teil ist so "wackelig" das ich es lieber nicht an Netzspannung hängen möchte.
Hallo Wolfgang! > Den Motor habe ich ausgemessen: > Wicklungswiderstand ca. 180Ohm, Stromaufnahme bei 240V ca. 22mA > Auf der Maschine steht eine Lesitungsaufnahme von 80W, bei einer 15W > Glühbirne als Beleuchtung. > > Ich gehe mal davon aus das in den 80W die Glühbirne enthalten ist, > bleiben also noch 65W für den Motor. Bei der gemessenen Stromaufnahme > komme ich rechnerisch aber nur auf 6W. Wie erklärt sich die Differenz zu > den 65W aus dem Typenschild? Gemessen habe ich Spannung und Strom mit > einem einfachen Digitalmultimeter. Du hast vermutlich ohne Last gemessen. Im Leerlauf wird der Motor natürlich deutlich weniger Strom aufnehmen als wenn du über den Saum einer Jeans nähst... Mit freundlichen Grüßen Thorsten Ostermann
Wenn du einfach ein 18 mal grösseres Poti nimmst, dann hast du den gleichen Widerstandsbereich auf 15° wie bei dem jetzigen auf 270°
Wie wäre es wenn du ein fertiges Pedal nimmst wie man es z.B. für ein Keyboard kaufen kann.
> Wie erklärt sich die Differenz zu den 65W aus dem Typenschild?
Die Stromaufnahme des Motors hängt sehr von der Belastung ab. Auf dem
Typenschild steht meines Wissens nach immer die höchste Leistung, die
der Motor für die vorgesehene Laufzeit verträgt.
Ich musste auch mal so ein Fuß-Pedal erneuern. Auch ich hatte
Schwierigkeiten, ein normales Poti unterzubringen.
Letztendlich hatte ich zwei Photowiderstände in Reihe (wegen der
Zulässigen Spannung) verwendet, sowie eine Glühlampe die am beweglichen
Teil des Pedals befestigt war.
Die Widerstände kamen dann anstelle des Potentiometer in eine Dimmer
Schaltung.
Angehängte Dateien:
-

Schieberegler100k.JPG
140 KB
Es gibt auch kleinere Schieberegler, z.B. in KFZ-Equalizer. Gabs mal bei Pollin, lin.100kOhm, Schiebeweg 10mm! Kannst gern einen abhaben, sind ja genug drauf ;) Jo
Hallo Thorsten, Thorsten Ostermann schrieb: > Hallo Wolfgang! > >> Den Motor habe ich ausgemessen: ... >> einem einfachen Digitalmultimeter. > > Du hast vermutlich ohne Last gemessen. Im Leerlauf wird der Motor > natürlich deutlich weniger Strom aufnehmen als wenn du über den Saum > einer Jeans nähst... ... das habe ich versucht zu berücksichtigen. Ich habe den Motor während der Messung mit einem Stück Holz "gebremst", er war zu dem Zeitpunkt schon aus gebaut. Dabei habe ich im Leerlauf 20mA und mit der Bremse 25mA gemessen. Meine Bremse war aber auch nicht wirklich gut. Ich habe den Motor jetzt wieder eingebaut und werde die Messung unter realen Bedingungen wiederholen. Mal sehen was dann heraus kommt.
Hi Gusti, Gusti schrieb: > Wenn du einfach ein 18 mal grösseres Poti nimmst, dann hast du den > gleichen Widerstandsbereich auf 15° wie bei dem jetzigen auf 270° das dachte ich am Anfang auch. Darum habe ich statt einem 50kOhm poti ein 500kOhm Poti eingebaut. Die Widerstandsänderung liegt dann mit 30kOhm schon nahe an den 50kOhm. Aber, leider verschieben sich die Widerstandsverhältnisse. Ich habe vom Schleiferabgriff des Potis aus folgendes gemessen: Pedal oben: Widerstand zum Ende A 51kOhm, zum Ende B 332 kOhm Pedal durchgedrückt: zum Ende A 20kOhm, zum Ende B 361kOhm Dann habe ich angenommen das ich das Poti so montiere das Punkt B an Pin 5 des U2008 liegt (also -Vs). Den Widerstand R14 (Datenblatt 2008) habe ich dann weg gelassen. Punkt A kann ich nicht einfach nach Masse (Pin 4 des U2008) legen weil der verbleibende Widerstand von ca. 20kOhm zu groß ist und ich dann nicht auf die 0V herunter komme. Daraus ist dann die Idee entstanden den Nullpunkt unter die 0V zu legen. Dazu habe ich mit eine zweite Spannung von ca. 15V erzeugt und berechnet wie die Widerstandsverhältnisse dann aussehen müssten. Das Ergebnis ist ein Widerstand R7 (Datenblatt U2008) von ca. 470kOhm. Eine Kombination aus 390kOhm Festwiderstand und 470kOhm Poti habe ich eingebaut. Leider habe ich dabei etwas falsch gemacht. Der U2008 ist jetzt tot. Das liegt entweder an falscher Dimensionierung des Spannungsversorgung, oder ich habe dem Pin 3 doch eine Spannung über 0V verpasst. Laut Datenblatt darf man an dem Pin nur 0V bis -Vs anlegen. Ich hatte zwar eine Schutzdiode eingebaut aber die wirkt auch nur bis ca. 0.5V, kommt also nie auf 0V herunter. Möglicherweise hat das genügt um den Chip zu killen, immerhin war das nicht innerhalb der angegebenen Maximalgrenzen ... Wie "empfindlich" ist der U2008 in der Beziehung? Ich habe mit dem Teil schon einmal einen Sanftanlauf gebaut. Das IC ist eigentlich unkompliziert. Der Sanftanlauf funktioniert zuverlässig.
Hi Stefan, geht's Dir gut? :-) Ich hatte Deinen Artikel bezüglich Perl gelesen ... reine Philosophiefrage ... Die Aussage "... veraltete Sprache ..." halte ich für Unsinn. Provokant: "Heute wird ja auch noch in Fortran programmiert ..." Wusel Dusel schrieb: >> Wie erklärt sich die Differenz zu den 65W aus dem Typenschild? > > Die Stromaufnahme des Motors hängt sehr von der Belastung ab. Auf dem > Typenschild steht meines Wissens nach immer die höchste Leistung, die > der Motor für die vorgesehene Laufzeit verträgt. > > Ich musste auch mal so ein Fuß-Pedal erneuern. Auch ich hatte > Schwierigkeiten, ein normales Poti unterzubringen. > > Letztendlich hatte ich zwei Photowiderstände in Reihe (wegen der > Zulässigen Spannung) verwendet, sowie eine Glühlampe die am beweglichen > Teil des Pedals befestigt war. > > Die Widerstände kamen dann anstelle des Potentiometer in eine Dimmer > Schaltung. Dann hast Du aber ein Leistungspoti verwendet und den Motor darüber direkt gedrosselt. Das wäre zwar auch eine Möglichkeit, aber solche Potis sind schon echte Trümmer und müssen natürlich auch von den Daten passen. Irgendwo habe ich noch so etwas herum liegen. Möglicherweise passet es auch von den Werten, aber ich glaube nicht das ich mir das antun möchte.
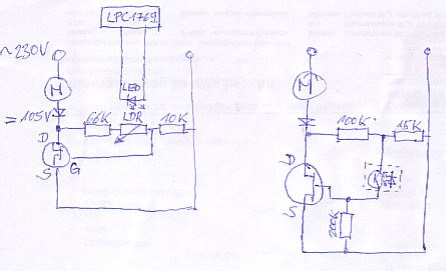
Nachtrag, Wusel Dusel schrieb: >> Wie erklärt sich die Differenz zu den 65W aus dem Typenschild? ... > > Letztendlich hatte ich zwei Photowiderstände in Reihe (wegen der > Zulässigen Spannung) verwendet, sowie eine Glühlampe die am beweglichen > Teil des Pedals befestigt war. > > Die Widerstände kamen dann anstelle des Potentiometer in eine Dimmer > Schaltung. daran hatte ich in der Tat auch schon gedacht. Einen Photowiderstand und dann die Beleuchtungsstärke mit dem Pedal ändern. Damit hätte man keine mechanische Übersetzung mehr. Ich hatte die Lösung mechanisch kurz an skizziert aber nicht weiter verfolgt. Ich hätte eine LED statt einer Glühbirne eingesetzt. Als ich diesen Gedanken hatte fand ich die Mechanische Übersetzung aber noch vielversprechender. Nach meinen letzten Widerstands Eskapaden erscheint mir die "optische Lösung" aber dann doch wieder sinnvoller zu sein. Sobald ich einen neuen U2008 habe probiere ich das mal aus ... :-)
Hi Jo, J. H. schrieb: > Es gibt auch kleinere Schieberegler, z.B. in KFZ-Equalizer. Gabs mal bei > Pollin, lin.100kOhm, Schiebeweg 10mm! Kannst gern einen abhaben, sind ja > genug drauf ;) > Jo die sehen auch jeden Fall besser aus als die Teile die ich hier gefunden habe. Die 100kOhm scheinen auch ganz gut zu passen. Wie kommen wir denn ins Geschäft, suchst Du irgendetwas zum tauschen? Wie können wir Kontaktdaten austauschen?
Schreib mal kurz (jhomey bei der web punkt de ;)
Angehängte Dateien:
So, der U2008 ist ja nun erst mal hinüber. Ich messe ca. 0 Ohm zwischen Pin 5 und Pin 4. Meine Vermutung ist das durch das Kondensator-Netzteil zu viel Strom geflossen ist. C1 hat ja rechnerisch nur 15kOhm, hinzu kommt der Einschaltstrom, der durch den 100 Ohm Serienwiderstand nur gering "gedämpft" wird. Es scheint mir der wahrscheinlichste Grund für den Ausfall zu sein. Die Schutzdiode (D3) sollte eigentlich genügen um zu verhindern das am Eingang Pin3 eine zu hohe, positive Spannung entsteht. Sobald ich die neuen U2008 habe werde ich zunächst den Einschaltstrom begrenzen und dann noch einmal versuchen mit dem Widerstandsnetzwerk den Bereich zu treffen in dem das Pedal ordentlich arbeitet. Die Schiebepotis von Jo erscheinen mir im Moment am erfolgversprechendsten zu sein. Ich bräuchte keine mechanische Übersetzung, lediglich einen Schiebearm, wie Peter ihn skizziert hat. Den Arm baue ich aber wahrscheinlich anders herum auf (Punkt E fest, Schiebepoti an Punkt F), weil die Elektronik so besser in das Gehäuse passt. Wenn das Schiebepoti gut auf den Nullpunkt justiert werden kann (z.B. durch ändern der Armlänge), bräuchte ich die positive Spannung nicht mehr und könnte den U2008 an Pin3 nicht mehr versehentlich im unerlaubten Bereich betreiben. Vielleicht mache ich auch noch einen Versuch mit Stefans Idee bezüglich LDR und LED. Mit der Schaltung bräuchte ich auch nicht mehr die positive Spannung. Erst mal ist jetzt ein paar Tage Pause bis die Chips da sind ...
Angehängte Dateien:
-

Motorfilter-Ohne-Erde.jpg
120 KB
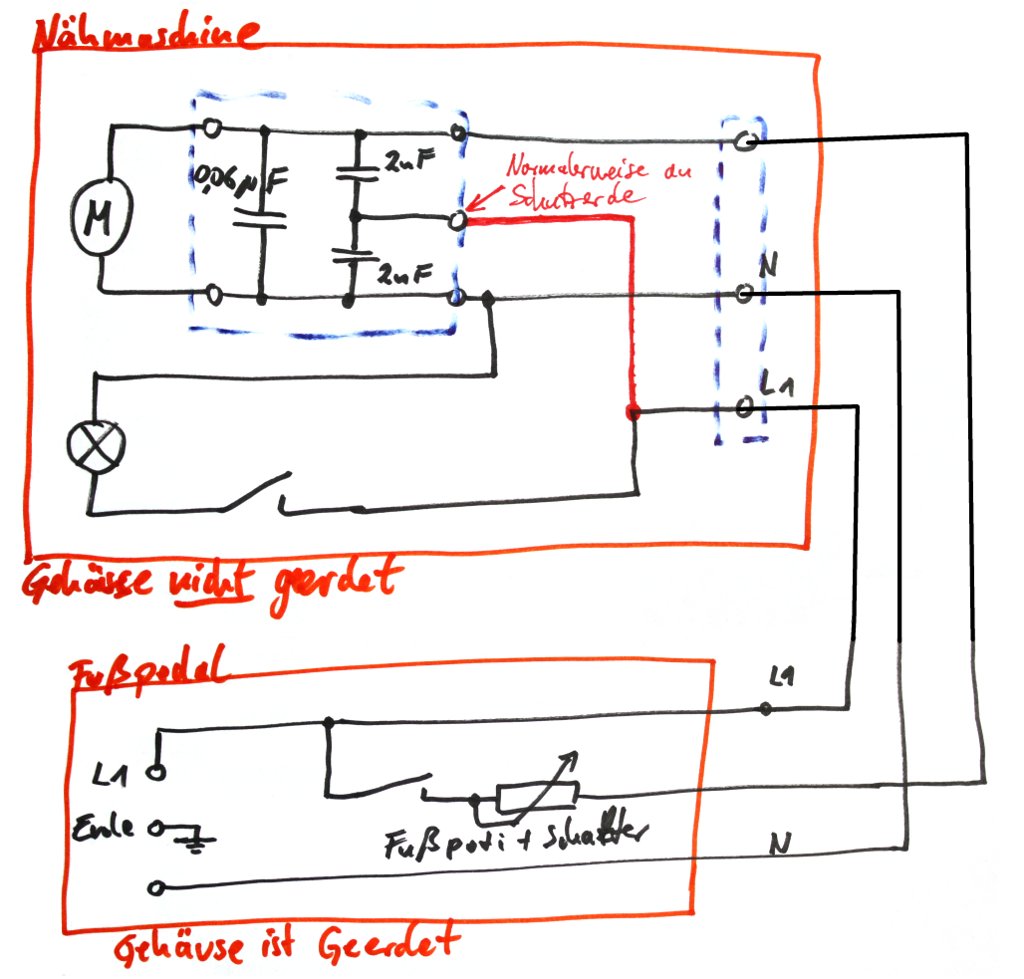
Hi zusammen, noch eine Sache die mich nachdenklich stimmt. Der XY-Kondensator am Motor war original nicht so an geschlossen wie es sein sollte. Die Nähmaschine hat ein Gußgehäuse aus Metall. Wenn ich mich nicht Irre fordert die VDE-0100 das solche Gehäuse geerdet werden müssen, wenn zum Betrieb Netzspannung verwendet werden. Das Gehäuse ist aber nicht geerdet. Die Maschine stammt wohl aus einer Zeit in der das noch nicht unbedingt notwendig war. Der Fußschalter, aus Metall, ist geerdet, was mich sehr beruhigt. Ein Anschluß des XY-Entstörkondensators wird normalerweise mit Erde verbunden damit die Störsignale nach Erde abgeleitet werden können. Da die Maschine aber keine Erde hat war dieser Pol des Kondensators an die Phase (L1) angeschlossen. Die anderen beiden Pole an den Nulleiter (N) und an den Motorschalter, wie erwartet. Aus meiner Sicht macht diese Schaltung nicht viel Sinn. Es wird ja nur zu dem 1. Kondensator ein weiterer parallel geschaltet. Zusätzlich hat man den Effekt das ein weiterer Kondensator über dem Ausgang des Fußpedals liegt (L1 nach Motorschalter). Im Fußpedal ist aber sowieso schon ein Entstörkondensator über dem Schalter eingebaut (habe ich auf der Zeichnung vergessen). Als ich den XY-Kondensator ersetzte habe ich den Erdanschluß einfach offen gelassen. Ihn an das Metallgehäuse zu legen wäre sicherlich keine gute Idee, das hätte wohl nur zu "kribbligen" Erfahrungen führen können ;-) Gibt es einen triftigen Grund warum ich den Erdanschluß des XY-Kondensators doch an L1 anschließen sollte?
Angehängte Dateien:
-

schieber-jo.jpg
84 KB
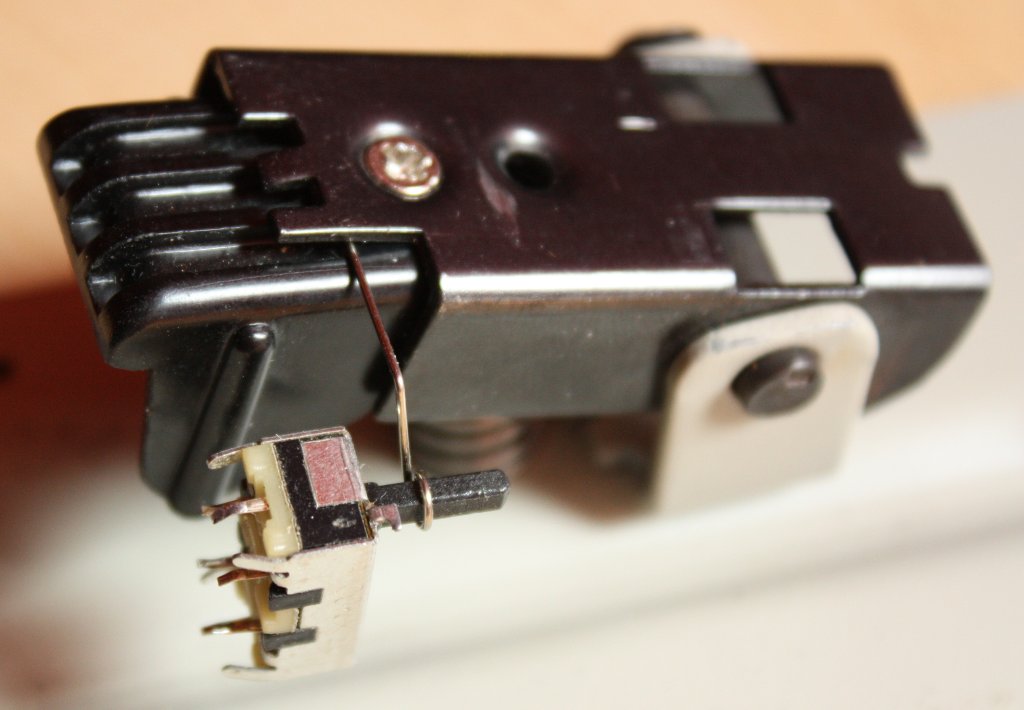
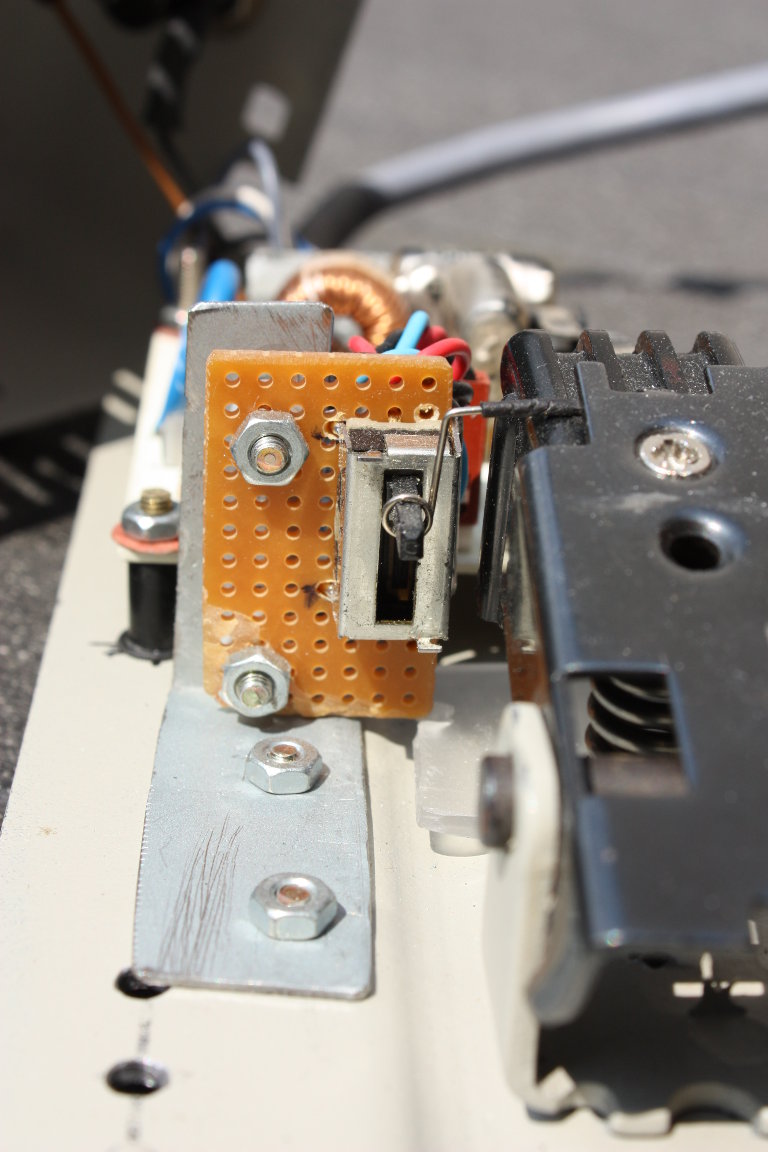
Hi zusammen, Jo hat mir freundlicher Weise ein paar seiner Schiebepotis geschickt. Das Poti ist nahezu Ideal. 100kOhm, ca. 1cm Schiebeweg. Ich habe mich entschlossen keine komplizierte Mechanik zu bauen sondern das Poti über einen Federstahl direkt an das Pedal zu hängen. Vom fertigen Aufbau, inklusive dem Mikroschalter zum ein Schalten der Maschine, schicke ich später. Die neuen Chips sind gestern angekommen. Die Platine habe ich wieder um gebaut auf die vorherige Schaltung. Die Spannungserzeugung für die positive Spannung ist wieder raus. Der Eingangskondensator wieder durch die Widerstände ersetzt. Im Moment habe ich Probleme den U2008B. Aus dem Datenblatt kann ich nicht erkennen wie ich die Bauteile genau berechnen muss. Es gibt einmal den Widerstand zum Messen des Motorstroms an Pin 1. Im Datenblatt finde ich wirklich nicht viele Angaben. Im Diagramm auf der ersten Seite steht etwas von +-250mV. In der Tabelle auf Seite 7 steht etwas von 300 - 400mV. Ich habe jetzt den Widerstand zwischen 0,39 und 2,2 Ohm verändert und Spannungen zwischen 125 und 900 mV je nach Widerstand und Motorbelastung gemessen. Wenn der Motor in Mittlere Drehzahl läuft "pumpt" er. Er ist also mal langsam und mal schnell. Ich schiebe das mal auf die Stromregelung, bin mir aber nicht sicher. Den 330kOhm Widerstand zwischen Pin 5 und Pin 6 habe ich durch eine 500kOhm Trimmer ersetzt um den Phasenwinkel einstellen zu können. Leider komme ich mit meinen Einstellungen nicht parat. Hat jemand von Euch Erfahrungen mit dem IC, dem Abgleich und der Nutzung an Motoren? Ich habe mal eine Glühbirne damit eingestellt, das war kein Problem. Dabei ging es auch um Softstart und Hellikeit. Nicht um "Regelung" bei erhöhter Motorlast. Gibt es irgendwelche Formeln, auch wenn es nur Näherungsformeln sind, mit denen ich in der Lage bin ein paar Bauteile zu berechnen? Im Moment sind einfach zu viele Stellschrauben in der Schaltung, die sich wechselseitig beeinflussen. Was brauche ich? - die Motorlast-Regelung einstellen - die minimale Anlaufgeschwindigkeit des Motors einstellen - die maximale Geschwindigkeit auf Wunsch herab setzten (z.B. mit einem Schalter. Außer dem Datenblatt und einigen Aufbaubeispielen finde ich im Netz nichts. Bei ATMEL habe ich auch keine Application Note zu dem Chip gefunden.
Angehängte Dateien:
-

pfaff96.png
6,4 KB
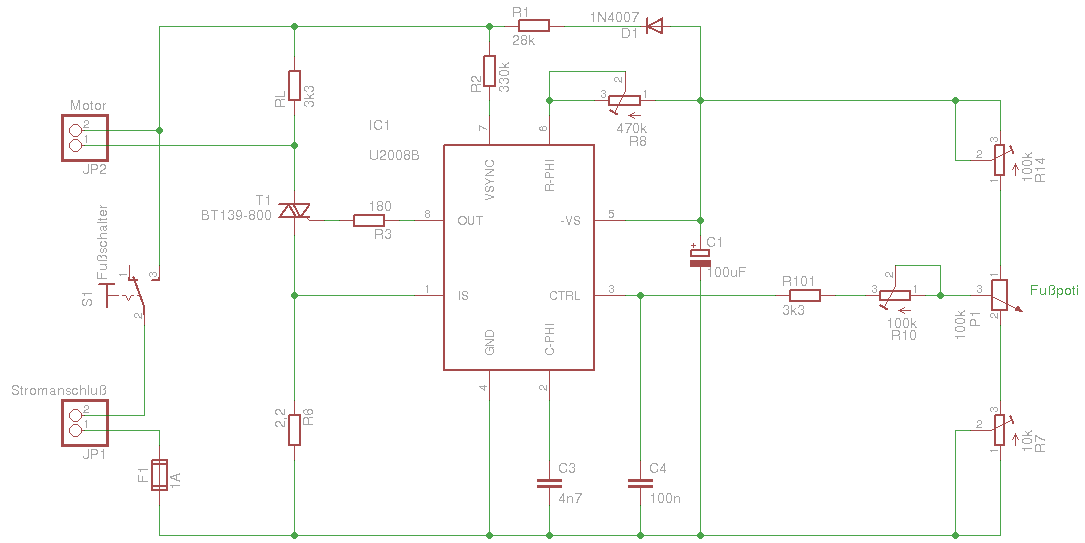
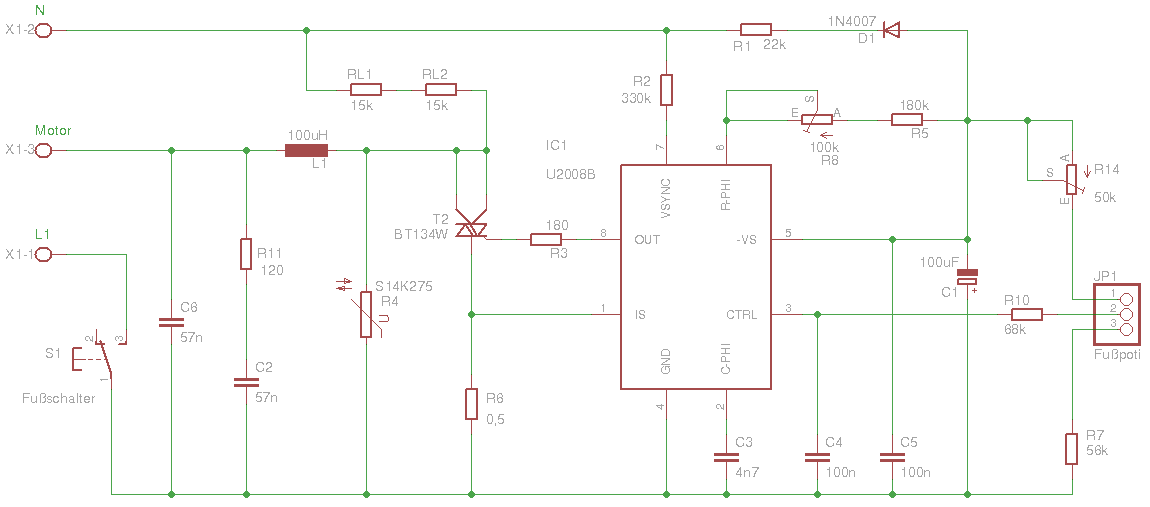
Hallo zusammen, das Poti von Jo ist montiert. Ich habe noch einen Mikroschalter dazu gefügt, damit das Ganze erst eingeschaltet wird wenn das Pedal gedrückt wird. Ich habe mal den aktuellen Schaltplan angehängt. Eigentlich ist an dem Schaltplan nichts ungewöhnliches mehr. Die Bezeichnungen der Bauelemente entsprechen weitestgehend den Bezeichnungen in der Beispielzeichnung im Datenblatt. Besonders ist nur der Widerstand RL. Der Widerstand ist über den Motor geschaltet und sorgt dafür das ein gewisser Haltestrom fließt damit der TRIAC durch geschaltet bleibt. Das musste ich leider so machen weil der kleine Motor der Nähmaschine maximal 26mA zieht. Das ist für den großen TRIAC zu wenig. Darum hatte ich das instabile Laufverhalten. Mit dem zusätzlichen Lastwiderstand läuft der Motor gleichmäßig, die Steuerung funktioniert auch gut. Nur der Steuerbereich der Motor-Geschwindigkeit passt mit den angegebenen Widerständen noch nicht. Allerdings habe ich nun ein Problem mit dem U2008B. Der Chip ist wieder gestorben. Das Fehlerveralten ist wie beim ersten Chip, zwischen Pin 4 und Pin 5 ist der Chip niederohmig. Irgendwie macht das keinen Spaß. Ich kann nicht erkennen woran der Chip stirbt. Ich glaube auch nicht das ich irgendwelche Grenzwerte verletzt habe. Ich habe noch kein Snubber-Netzwerk zum Schutz des TRIAC verbaut, kann mir aber auch nicht vorstellen, das das ein Problem für den U2008B sein soll. Hat jemand von Euch Erfahrung mit dem U2008B? Habe ich einen Fehler den ich nicht sehe? Fehlt eine Schutzschaltung? Im Moment hätte ich nicht übel Lust das Teil in die Ecke zu werfen ...
Wahrscheinlich hast Du mindestens 5 Baustellen: Elektrosicherheit,Snubber,richtigen Triac-Haltestrom und Deinen Schaltkreis sowie den mechanischen Aufbau. Es würde mich wundern, wenn Du in 20 Minuten Erfolg melden kannst. Im Nähmaschinen-Handel gibt es komplette Motoren mit Fußpedal. od. "Anlasser" z.B. http://www.naehtechnik-muenchen.de/index.php?/austausch-fussanlasser.html
Wie kommst Du darauf das ich in 20 Minuten fertig sein möchte? Mir ist klar das es nicht schnell gehen wird. Am Ende gibt es noch eine Platine, der aktuelle Aufbau auf Lochraster ist sicher nicht ideal. Die Baustellen, die Du genannt hast sind mir bekannt. Die Frage bezog sich auf den Chip. Hast Du eine Idee warum er nicht überlebt?
Wolfgang Heinemann schrieb: > Allerdings habe ich nun ein Problem mit dem U2008B. Der Chip ist wieder > gestorben. Das Fehlerveralten ist wie beim ersten Chip, zwischen Pin 4 > und Pin 5 ist der Chip niederohmig. Irgendwie macht das keinen Spaß. Ich > kann nicht erkennen woran der Chip stirbt. Ich glaube auch nicht das ich > irgendwelche Grenzwerte verletzt habe. Ich habe noch kein > Snubber-Netzwerk zum Schutz des TRIAC verbaut, kann mir aber auch nicht > vorstellen, das das ein Problem für den U2008B sein soll. Doch, mach mal das Snubber-Netzwerk rein. Wenn beim Abschalten noch ein Reststrom fließt, hast du ruckzuck hohe Spannungen über dem Thyristor und damit zwischen Pin 1 und Pin 8. Und wenn Pin 1 unter Null abtaucht, wird das ganz schnell unangenehm für den Baustein. Dass der Defekt sich dann woanders zeigt, ist bei ICs nicht so ungewöhnlich. Max
Hallo Max, danke für den Hinweis! Du ermutigst mich es noch einmal mit dem Chip zu versuchen. Ich komme aus der Digitaltechnik und habe mit TRICS und induktiven Lasten keine Erfahrung. Ich habe mir noch einmal das Datenblatt angeschaut. Der Pin 1 darf Eingangsspannung im Bereich von -VS bis +2V sehen. Für R6 hatte ich einen 2,2 Ohm Widerstand gewählt, viel höher als im Datenblatt angegeben, da ja der Motorstrom gering ist. Allerdings würden ca. 1A Spitzenstrom genügen um die 2V abfallen zu lassen. Als 1. Maßnahme würde ich den Widerstand verkleinern, allerdings funktioniert dann wahrscheinlich die Lastregelung nicht mehr so gut. Im Datenblatt steht auch das an R6 +-250mV abfallen soll. Selbst mein 2,2 Ohm Widerstand war da schon zu klein ... Um den Motor vernünftig steuern zu können muss der Chip aber die Phasenverschiebung zwischen Betriebsspannung und Strom erkennen, das geschieht auch über Pin 1 und das Signal muss ausreichend groß sein. Spricht eigentlich etwas dagegen Schutzdioden zwischen Pin 1 und Pin 4 zu legen? Zwei schnelle Dioden, antiparallel ... Das Snubber Netzwerk kommt rein. Ich entwerfe gerade eine Platine, weil ich nicht zum 3. mal das Lochraster ändern möchte und weil auf dem Lochraster der Hauptstrompfad schlecht gewählt ist. Pin 4 vom U2008B liegt da mitten auf dem Weg zwischen JP1/Pin1 und R6. Der Motorstrom geht also über die GND-Versorgung des Cips, drüber könnten auch Spitzen eingeschleift werden. Parallel experimentiere ich mit einem anderen Motor und einer Gleichspannungssteuerung. Hier im Thread wurde auch schon auf diese Möglichkeit hin gewiesen. Ich würde einen kleinen Prozessor zur Steuerung nehmen und hätte dann die Möglichkeit die Steuerkennlinie des Pedals und die minimale und maximale Geschwindigkeit einfacher fest zu legen.
Diese ICs sind normalerweise recht robust, wir verwenden die U210 und U211. Was mir aufgefallen ist: Du hast den C1 falsch gepolt, der muß mit Plus an Masse und Minus zeigt zur Diode. Diese U2xxx funktionieren mit negativer Versorgungsspannung. (Zündverhalten der Triacs). Stefan
Hallo Stefan, ja das mit dem C stimmt. Ich habe den Zeichenfehler korrigiert. Auf der Platine ist er aber bisher immer richtig herum eingebaut gewesen. Wenn Du sagst, der ist normalerweise robust, wie setzt Ihr das IC denn ein? Benutzt Ihr den auch für Motorsteuerungen? Wenn ja, für welche Leistungen? Benötigt man für kleine Motoren einen wesentlich größeren R6 oder genügt ein Spannungsabfall der deutlich kleiner als 250mV ist damit die Schaltung sicher arbeitet? Ich habe im Internet schon einige Beschreibungen gefunden. Die setzten alle mehr oder weniger die Schaltung aus dem Datenblatt ein.
Hallo Wolfgang, wir verwenden den U210B in Drehzahlregler bis 1200W bzw. 2000W. R6 ist bei uns 0.1R bzw. 0.01R, damit die Verlustleistung im Rahmen bleibt. Der U210 hat allerdings dafür noch eine Verstärkerstufe eingebaut. Snubber wurde ja schon genannt. Wie sieht Dein Probeaufbau aus, fließt der Motorstrom auch z.B. in der Masseleitung zum IC? Stefan
Hallo Stefan, StefanK. schrieb: > Hallo Wolfgang, > > wir verwenden den U210B in Drehzahlregler bis 1200W bzw. 2000W. R6 ist > bei uns 0.1R bzw. 0.01R, damit die Verlustleistung im Rahmen bleibt. Der > U210 hat allerdings dafür noch eine Verstärkerstufe eingebaut. ok, ich schaue mir das Datenblatt vom U210B mal na um zu sehen woe die Unterschiede sind. > > Snubber wurde ja schon genannt. > > Wie sieht Dein Probeaufbau aus, fließt der Motorstrom auch z.B. in der > Masseleitung zum IC? Ja, ich denke schon. Da das IC mitten zwischen Motor und Stromversorgung liegt, ist das so. Darum auch das Redesign mit geäzter Platine. > > Stefan
Wolfgang Heinemann schrieb: > Pin 4 vom U2008B > liegt da mitten auf dem Weg zwischen JP1/Pin1 und R6. Der Motorstrom > geht also über die GND-Versorgung des Cips, drüber könnten auch Spitzen > eingeschleift werden. Sorry, habe ich überlesen. In einem Datenbuch von Telefunken! von 1984 steht, dass keine hohen Ströme über die Leitungen von GND zum IC fließen sollen, also Dein Redesign ist eine gute Idee. Den U210B wirst Du am Markt nicht mehr finden, der ist abgekündigt. Diese ganzen U2xxx sind von Telefunken aus den 80er Jahre. Atmel hat damals Telefunken in Heilbronn aufgekauft und die Power-ICs übernommen. Eine Zeit lang hieß es noch Atmel-Telfunken, dann ist Telefunken ganz verschwunden. Stefan
leistungsechtheitsbedarf umspulen 0,1 watt (zugkraft nur gramms mit solarmotor o.ä.) die nähmaschine braucht aber 70-80watt mit voller drehzahl nähen 5-7watt mit rollstuhlmotor 24v 100watt und nur 8volt und 0,6 ampere die nähmaschine braucht aber 40-60watt leistung wird im motor verheizt wer sparen will kann mit akkubohrmaschine nähen
spanungsmessung am motor vermeiden weil digimeter fliegt beim motoraus in die ewigen jagdgründe. ohmmessung auch weil motor hat entstörkondi drin und der anlasser viell. auch. entstörkondi klein halten aus liebe zum triac nur 10nano.dazu motoindukt. noch ausmessen und entstörkondiaufladespannung ausrechnen. poti mit leitsilber stellbereich einengen. wenn empfindlichkeit nicht passt dann anderes poti berechnen oder getriebevorsatz nehmen. poti mit parallelwiderstand an herstellersprünge (220-500ohm) anpassen. ohmmessung nicht über die relaiskontakte sondern direkt die r`s messen. nullpunktverschiebung mit differenz(subtrahierer) opv schaltung machen. 230vac motor auf 24v dc umbauen ginge notfalls auch.dazu statorspulen an 9- ca.15volt dc und rotor an ca.24vdc und stator thermisch überwachen.den anlasser dann für 24v trafo benutzen. motorleichtlauf mit 1gramm genauer waage testen band um keilrad wickeln und waage nullen, kraft alle 20°messen. freilauf für 2. langsamlaufmotor einbauen umgeht anfahrproblem. den u210b mit sanftanlauf und einer 2.drehzahlreg danach bringt kraft beim langsamlauf einen neue chinamaschine hat etwa 9-12nachteile und 7vorteile.darunter der am metallchassis liegende motor der mit tüv genehmigung einen akuraten stromschlag über den nähfuß oder den fadentrenner liefert.
Hallo Heißlöter, sorry, aber ich habe ein paar Probleme alles auf zu nehmen was Du schreibst. Ich werde aber versuchen Deine Hinweise zu berücksichtigen und umzusetzen. Den Snubber berechne ich gerade. So wie ich es verstanden habe ist ein C im Bereich 1nF - 10nF für diesen, kleinen, Motor eine gute Idee. Die Induktivität der Motorwicklungen muss ich noch messen. Danke für Deinen Beitrag. Wieso kennst Du Dich mit dem Thema so gut aus? Hast Du in dem Bereich schon viel Experimentiert?
bei meinem sanftanlauf mit u210b steht das lastnachregelpoti (nicht drehzahlreglerpoti) bei einem durchmesser von 8mm etwa 1mm vor der mittelstellung.bei regelleistung bis 600w erst mit kleinem motor testen dann einen 400watt typ und evtl ein 600w typ. alles mit kohlebürsten natürlich. evtl. ist schon ein 24v motor drin und der triac verträgt den trafo nicht. das kann sein weil 22mA bei230v ziemlich spanisch vorkommen. dann einen 250w heizer oder lampe immer parallel mit anschließen oder den alten schalter benutzen 590ohm...492ohm.
der tyristor sollte aber ein triac sein und der zündstrom muss stimmen bzw rvor ändern,sonst ist alles für den sarg. eine led als nählicht ist etwa 2x heller und sticht aber im farbton, braucht aber nur 1watt. es gibt pocketnähmaschinen mit 2 oder 4 mignonbatterien aber wohl ohne nahtauswahl. die motorohms nochmal direkt am motor messen und vergleichen.(ist trafo drin? böse für triac!) im langsamlauf wird alle energie über den anlasser verheizt der rest ist dann auch noch blindleistung im motor. einen effizienznachweis braucht natürlich kein hersteller und mehrbedarf an material wie cu fe und magnete ist out. die chinamaschine hat zahnriemenantrieb am motor und von 17 merkmalen sind 9 schlecht. bei der motorinduktivität gilt: imotor x imotor x L/2=ukondi x ukondi x ckondi/2. also 1nf wären bistimmt zu klein.
Wolfgang Heinemann schrieb: > Eben habe ich einen Kaputten Winkelschleifer aus dem Keller genommen und > werde an dessen Motor mal ausprobieren wie das Ganze funktioniert. Und warum nimmst du nicht einen Regler von einer "besseren" Bohrmaschine o.ä., wo man mit dem Finger die Drehzahl regeln kannst? Falls der Winkelschleifer mehr als Ein/Aus kann, hast du doch alles.
Hi Michael, Michael_ schrieb: > Wolfgang Heinemann schrieb: >> Eben habe ich einen Kaputten Winkelschleifer aus dem Keller genommen und >> werde an dessen Motor mal ausprobieren wie das Ganze funktioniert. > > Und warum nimmst du nicht einen Regler von einer "besseren" Bohrmaschine > o.ä., wo man mit dem Finger die Drehzahl regeln kannst? > Falls der Winkelschleifer mehr als Ein/Aus kann, hast du doch alles. Leider hatte der Winkelschleifer nur ein/aus. Aber da fällt mir ein das ich eventuell noch eine Bohrmaschine mit Getriebeschaden habe ... da muss ich mal im Keller suchen.
Bei Netzgeräten hat man oft so ein Rädchen zur Hubbegrenzung. Da muß man basteln. Und links/rechts Lauf geht da evtl. auch. Und da man keinen Finger frei hat, muß man eben den Schuh ausziehen um am Hebel mit dem Zeh zu ziehen :-). Von der Sache her sollte auch die Elektronik eines Akkuschraubers gehen. Ein anderes Triac, spannungsfestere C usw. sollten es schon sein.
Angehängte Dateien:
-

Fussschalter.JPG
140 KB
Genau das mit dem Regler hab ich Damals(tm)auch so gemacht. Der war aus einem alten AEG-Bohrhammer. Die Schraube ist wegen der Höhe drin. Jo
es bräuchte eigentlich einen schrittmotor zum nähen. was zum anlaufen noch ginge wären einige kondis mit insgesamt 2-3µF in reihe zum motor aber 630vac typ(3x 0,68µ 1000vdc ca.a 2.50eu) die neue chinamaschine hat nur noch ca. 4vorteile,2-3 sind gleich und 10 sachen schlechter.darunter die anleitungsskizzen als kritzelzeichnung. die nähmotoren laufen zeitweise in der eigenresonanz das heißt ihre welle verbiegt sich und sie haben eine schwere stelle.formel gibt es. man kann die schwere stelle der maschine mit einem rs flipflop und opto- lichtschranke über elektr. lastrelais 600volt (auch entstören) und widerstand vor motor entschärfen. wenn einem dr motor zu weit unten beim anlassertreten anläuft die motorindukt für den entstörkondi ermitteln: (rOhm zum Quadrat - r ac zum Quadrat)wurzel= durch 2durch pi=induktiv.L
Ich habe eine Sattler-Nähmaschine Singer k29 von 1895 und habe sie mit einem 70Watt-Motor ausgerüstet. Da sie sehr langsam laufen soll, möchte ich sie mit einer Drehzahlbegrenzung ausstatten. Ich möchte dazu einen Mosfet IRF 730 - 400V/5A - über einen atmega8 ansteuern. der atmega soll die Stichzahl der Nähmaschine über einen Reed-Kontakt messen und den Mosfet dann über pwm entsprechend ansteuern. Wäre für Hinweise dankbar, ob das ganze so funktionieren kann.
Hallo, leluno schrieb: > Ich habe eine Sattler-Nähmaschine Singer k29 von 1895 und habe sie mit > einem 70Watt-Motor ausgerüstet. Da sie sehr langsam laufen soll, möchte > ich sie mit einer Drehzahlbegrenzung ausstatten. Ich möchte dazu einen > Mosfet IRF 730 - 400V/5A - über einen atmega8 ansteuern. der atmega soll > die Stichzahl der Nähmaschine über einen Reed-Kontakt messen und den > Mosfet dann über pwm entsprechend ansteuern. Wäre für Hinweise dankbar, > ob das ganze so funktionieren kann. den Thread habe ich vernachlässigt weil ich ein paar Tage im Krankenhaus war, ich arbeite aber immernoch an dem Projekt und habe ein Platinen-Layout fertig. Jetzt muss ich die Platine fertig machen, bestücken und testen. Prinzipiell sollte das so funktionieren, wie Du es vorhast. Du kannst den motor mit Gleichspannung betreiben und dann mit einem einzigen Transistor steuern. Die Last geht stark in die Drehzahl ein. Ich würde darum auch den Motorstrom messen und für die Steuerung auswerten. Das Reed-Relais sollte für kleine Drehzahlen ok sein. Ich würde aber einen Hall-Sensor oder eine IR-Lichtschranke verwenden, die sind verschleißfrei und auch bei höheren Drehzahlen brauchbar. Den ATMega8 kannst Du natürlich nehmen. Ich persönlich würde aber einen kleinen AT-Tiny nehmen, einfach wegen den Bauteilabmessungen. Du wirst ja nicht so viele I/O Leitungen benötigen, aber wenn der Mega8 gerade rum liegt ... Es "kann" funktionieren, ob es funktioniert hängt aber stark von Deinem Design ab. Poste doch mal Deinen Schaltungsentwurf ...
Angehängte Dateien:
-

Scan2.PNG
49 KB
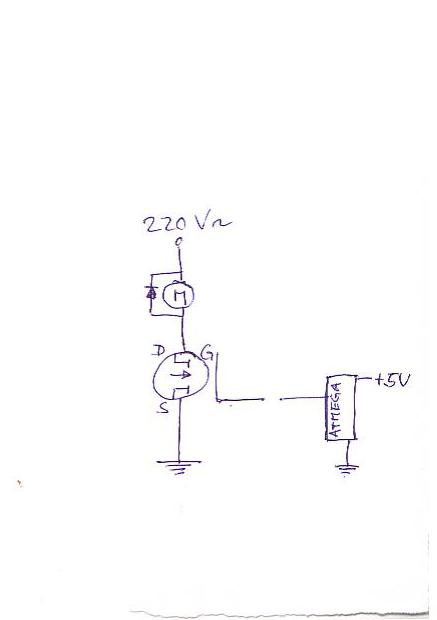
anbei der erste Schaltungsentwurf. Der Atmega muss später selbstverständlich galvanisch getrennt werden.
> anbei der erste Schaltungsentwurf.
Der Weg ist offenkundig noch weit. Verdammt weit.
Fange damit an, Gleichspannung und Wechselspannung zu verstehen.
Tja, < MaWin schrieb: >> anbei der erste Schaltungsentwurf. > > Der Weg ist offenkundig noch weit. Verdammt weit. > > Fange damit an, Gleichspannung und Wechselspannung zu verstehen. das sehe ich auch so ... Diese Andeutung einer Schaltung wird Dir um die Ohren fliegen. Wenn Du Glück hast wirst Du nicht verletzt.
leluno schrieb: > anbei der erste Schaltungsentwurf. Der Atmega muss später > selbstverständlich galvanisch getrennt werden. Nach den 2 Negativantworten (die durchaus richtig sind!) mal eine konstruktive: Nimm ein SSD (Solid State Relais) mit Thyristor. Das kann Wechselspannung und hat Potentialtrennung. Gruß Dietrich
ich gehe mal davon aus, dass der IRF als Halbleiter den Strom nur in einer Richtung durchlässt, damit hätte man dann einen gepulsten Gleichstrom. Ansonsten müsste noch eine Gleichrichter-Diode davor.
Hi, leluno schrieb: > ich gehe mal davon aus, dass der IRF als Halbleiter den Strom nur in > einer Richtung durchlässt, damit hätte man dann einen gepulsten > Gleichstrom. Ansonsten müsste noch eine Gleichrichter-Diode davor. auch ich möchte nicht nur unken, aber so wie Du es gezeichnet hast ist erst mal nicht erkennbar das es funktionieren wird. Wenn Du nur eine Halbwelle nutzt verschenkst Du Leistung und reduzierst die Steuergenaugigkeit für den Motor, gerade im unteren Drezahlbereich. Wenn Du Wechselstrom verwendest solltest Du beide Halbwellen nutzen und benötigst entweder ein bauteil welches beide Halbwellen schalten kann (TRIAC) oder eine Brückenschaltung mit zwei Transistoren, oder das von Dietrich angesprochenen SSD. Du solltest auch die Steuerlogik (µC) von der Leistungselektronik galvanisch trennen. Das kannst Du z.B. mit einem Optokoppler selbst bauen oder ein SSD nehmen. Wenn Du mit Gleichstrom arbeitest, dann baue eine Vollweggleichrichtung, damit Du beide Phasen nutzen kannst und glätte die Gleichspannung mit einem geeigneten Elko. Du kannst dann im wesentlichen Deine Schaltung, verwenden, allerdinsg trenne bitte auch hier galvanisch zwischen Leistungselektronik und Steuerelektronik. Prinzipiell brauchst Du das in dem fertigen Geröt nicht zu tun, aber zumindest so lange Du entwickelst solltest Du die Teile trennen, sonst zerstörst Du unter Umständen Deinen Computer, ewnn Du mal vergisst den Programmieradapter vor dem Test ab zu ziehen. Es wäre in meinen Augen äußerst Riskant ohne galvanische Trennung zu entwickeln!
Ach so, hatte ich vergessen. leluno schrieb: > ich gehe mal davon aus, dass der IRF als Halbleiter den Strom nur in > einer Richtung durchlässt, damit hätte man dann einen gepulsten > Gleichstrom. Ansonsten müsste noch eine Gleichrichter-Diode davor. Du würdest dann due Schutzdiode im IRF "nutzen". Und zwar nicht als Schutzdiode sonden als Gleichrichter ... kann man machen. Schau mal ins Datenblatt was der von Dir favorisierte IRF aushält. Ich würde aber lieber eine extra Gleichrichtung spendieren, kostet ja nicht viel ...
vielen dank für die Hinweise. ich habe die IRFs bestellt und werde die Schaltung einfach mal ausprobieren. Da der 70 Watt Motor für meine Nähmaschine viel zu schnell ist, reicht wahrscheinlich die Leistung einer Halbwelle. Wenn es nicht funktioniert, ist es wohl am einfachsten, den 220 Volt-Motor durch einen 12 Volt-Motor zu ersetzen, der dann über Mosfet und PWM angesteuert werden kann.
Hallo, leluno schrieb: > vielen dank für die Hinweise. ich habe die IRFs bestellt und werde die > Schaltung einfach mal ausprobieren. Da der 70 Watt Motor für meine > Nähmaschine viel zu schnell ist, reicht wahrscheinlich die Leistung > einer Halbwelle. Wenn es nicht funktioniert, ist es wohl am einfachsten, > den 220 Volt-Motor durch einen 12 Volt-Motor zu ersetzen, der dann über > Mosfet und PWM angesteuert werden kann. vielleicht darf ich Dir noch einmal anraten die "Schaltung" nicht einfach, wie skizzert auf zu bauen und in Betrieb zu nehmen. Wenn Du nur eine Halbwelle nutzt und das so anschließt wird etwas kaputt gehen. Ich sehe z.B. keine Schutzbeschaltung für das Gate des MOS-FET. Du darfst dort maximal +-20V rein geben, da Du aber Wechselstrom anlegst musst Du zumindest noch dafür sorgen das die Gatespannung nicht zu negativ wird ... ich bin immernoch davon überzeugt das es so nicht funktionieren wird und dir das Ganze um die Ohren fliegt. Bitte zeichne noch einmal einen neuen Schaltplan, der auch wirklich alle Teile enthält, die Du einsetzen möchtest und genau so wie Du die verdrahten möchtest. Ich wette mit Dir das hier im Forum einige Menschen Hinweise geben können die Dich davor schützen viel Siliziunm zu verbrennen und Deinen Sicherungsausautomaten zu überanstrengen! Diese konkreten Hinweise kannst Du aber erst dann erhalten wenn Du einen detailierten, finalen Schaltplan postest ...
bei ebay gibt es das solid state relais n4825d für unter 5€. Das enthält im Prinzip exakt die Schaltung wie ich sie brauche. Damit ist der Elektronik-Teil praktisch erledigt. Basteln lohnt da nicht mehr. Danke für den Hinweis von Dietrich. Nächster Schritt ist das Programm für die Erfassung der Drehzahl und die PWM-Steuerung.
Hallo, leluno schrieb: > bei ebay gibt es das solid state relais n4825d für unter 5€. Das enthält > im Prinzip exakt die Schaltung wie ich sie brauche. Damit ist der > Elektronik-Teil praktisch erledigt. Basteln lohnt da nicht mehr. Danke > für den Hinweis von Dietrich. Nächster Schritt ist das Programm für die > Erfassung der Drehzahl und die PWM-Steuerung. sieht gut aus. Damit bist Du dann auf der sicheren Seite. 5€ scheint ja ein super Preis zu sein. Poste doch mal den Link auf die Angebotsseite.
Hi >Nächster Schritt ist das Programm für die >Erfassung der Drehzahl und die PWM-Steuerung. Was willst du mit PWM? Das ist für Gleichspannung. Bei Wechselspannung brauchst du eine Phasenanschnittssteuerung. MfG Spess
leluno schrieb: > bei ebay gibt es das solid state relais n4825d für unter 5€. Das enthält > im Prinzip exakt die Schaltung wie ich sie brauche. Damit ist der > Elektronik-Teil praktisch erledigt. Was für ein Blödsinn. Das N4825D eignet sich nicht zum dimmen per Phasenanschnitt, es ist also keineswegs die Schaltung die du brauchst, es ist nicht das random-phase Modell N4825D-L (welches du kaum bekommen wirst, sicher nicht für 5 EUR). http://www.ebay.de/itm/2000W-Spannungsregler-Dimmer-Speed-Temperatur-Controller-Volt-Regler-Regulator-/370871587975 http://www.ebay.de/itm/Motorregler-Lampen-Dimmer-Motor-Regler-Leistungsregler-/150324506695?pt=Dimmer&hash=item230009f047
leluno schrieb: > http://www.ebay.de/itm/SSR-Elektronisches-Solid-State-Relais-Halbleiterrelais-/181173455451?pt=Elektromechanische_Bauelemente&hash=item2a2ec78a5b Danke. Ich habe mal ein wenig im Datenblatt geschnüffelt. Ich kenne mich mit SSRs nicht so aus, aber so wie ich es verstehe kannst Du nicht ein PWM beliebiger Frequenz da daruf setzen. Das Relais schaltet nur im Nulldurchgang. Im Datenblatt steht etwas von maximal einer Halbwelle Ein- bzw. Aus-Schaltzeit. Das klingt so als wäre ein Triac verbaut der sich im Nullduchrgang löscht. Wenn dann noch eine Nulldurchgangserkennung für den Einschaltmoment dazu kommt, und das scheint so zu sein, schaltet das Teil immer nur komplette Halbwellen. Mir stellt sich die Frage ob Du überhaupt ein PWM mit 100Hz bauen kannst, also Quasi eine Phasen An-/Ab-schnittsteuerung. SSR ist nicht gleich SSR. Es gibt Relais ohne Nulldurchgangserkennung die aber trotzdem für Wechselstrom eingesetzt werden können. Was mir bei dem Konzept auch nich fehlt ist die Messung des Motorstromes, damit Du bei Belastung hoch regeln kannst um eine konstante Stichzahl zu erreichen. Es kann sein das das für Deine Maschine keine Rolle spielt. Merkst Du im Momemnt einen Leistungsabfall wenn Du unterschiedlich dicke Matterialien nähst?
spess53 schrieb: > Hi > >>Nächster Schritt ist das Programm für die >>Erfassung der Drehzahl und die PWM-Steuerung. > > Was willst du mit PWM? Das ist für Gleichspannung. Bei Wechselspannung > brauchst du eine Phasenanschnittssteuerung. > > MfG Spess Das sehe ich nicht so. Warum nicht PWM mit Wechselspannung?
MaWin schrieb: > leluno schrieb: ... > Was für ein Blödsinn. > > Das N4825D eignet sich nicht zum dimmen per Phasenanschnitt, > es ist also keineswegs die Schaltung die du brauchst, > es ist nicht das random-phase Modell N4825D-L > (welches du kaum bekommen wirst, sicher nicht für 5 EUR). ... Leistungsregler-/150324506695?pt=Dimmer&hash=item230009f047 Ok, drastisch ausgedrück, aber MaWin teilt da meine Bedenken ...
ich gehe erstmal davon aus, dass der Motor auch langsamer läuft wenn er phasenweise an und abgeschaltet wird. Das mit dem Triac-Nulldurchgang dürfte dann kein Problem sein, wenn die Schaltphasen länger sind als die Intervalle der Nulldurchgänge. Da ich das SSR nun einmal bestellt habe, werde ich es einfach ausprobieren. Wenn es dann wirklich Blödsinn ist, hab ich eben Pech gehabt und werde etwas anderes probieren.
Hi, leluno schrieb: > ich gehe erstmal davon aus, dass der Motor auch langsamer läuft wenn er > phasenweise an und abgeschaltet wird. Das mit dem Triac-Nulldurchgang > dürfte dann kein Problem sein, wenn die Schaltphasen länger sind als die > Intervalle der Nulldurchgänge. Da ich das SSR nun einmal bestellt habe, > werde ich es einfach ausprobieren. Wenn es dann wirklich Blödsinn ist, > hab ich eben Pech gehabt und werde etwas anderes probieren. Du kannst dann halt nicht so fein einstellen. Du hast ja nur diesen 100Hz Takt in dem Du Halwellen weg lassen kannst. Ich gehe mal davon aus das der Motor ein wenig "stottern" wird. Ausprobieren kannst Du es auf jeden Fall. Die Genauigkeit kannst Du ja mal überschlagen. Du hast genau ein bit Auflösung pro 100Hz ... bei nur 10 Schritten bist Du schon bei einer 10tel Sekunde ... klingt nicht gut. Wenn Du ein "random phase" SSR nimst kannst Du dutrchaus eine PWM Steuerung bauen. Das dürfte mit dem kleinen Motor funktionieren. Ich glaube nur das das relativ viel "Schmutz" (Störsignale) auf der Stromleitung erzeugen würde. Du müsstest auf jeden Fall noch einigen Aufwand in die Entsörung der Schaltung stecken. Dein Motor frisst ja noch nicht einmal ein halbes Ampere. Du kannst also mit einem wesentlich kleineren SSR an die Sache heran gehen. Das Teil, weilche Du da gekauft hast, kann ja die Stromversorgung von Deinem gesamten Haus schalten, ist also etwas überdimensioniert. Laut Datenblatt braucht das Relais übrigens einen minimalen Haltestrom von 40mA. Bei meinen Versuchen hatte ich Probleme, weil der Strom meines Motors zu klein ist und darum in der ersten Schaltung die Steuerung nicht richtig funktioniert hat. Der Triac hat entweder zu spät ein oder zu früh aus geschaltet was zu unruhigem Lauf des Motors geführt hat. Es könnte Dir also helfen auch eine Grundlast parallel zum Motor zu schalten (kleine Glühlampe oder dicker Widerstand). Diese Grundlast darf natürlich nicht über dem 40mA Haltestrom liegen sonst schaltet Dein SSR nicht mehr ab. Für eine Phasenanschnittsteuerung könntest Du einen MOC nehmen https://www.mikrocontroller.net/part/MOC3020 Die waren schon öfter Thema hier im Forum. Der 3020 dürfte zu klein sein, aber es gibt sicher welche die mehr Strom abkönnen. Mit dem 3020 kannst Du dann wieder nur eine Phasen-anschniiit oder -abschnitt Steuerung Bauen, weil es ein TRIAC ist. Zusammen mit einem Shunt und einer Null-Durchgangserkennung könntest Du dann eine Steuerung bauen die auch die Phasenverschiebung berücksichtigt und Lastwechsel ausregeln kann. Wenn ich weiterhin Probleme mit den U2008B habe, werde ich auch so etwas aufbauen. Im Moment möchte ich aber einfach diesen U2008 stabil ans laufen bekommen. Ich habe jetzt noch eine alte japanische Nähmschine aus dem Keller gesucht, bei der der Motor fehlt. Ich hatte ein paar Versuche mit einem alten Motor eines kaputten Schwingschleifers gemacht und werde den mal an die alte Nähmschine basteln. Wenn es die Mechanik dann halbwegs tut baue ich noch eine neue Steuerung, diesmal mit Mikroprozessor ...
leluno schrieb: > Wenn es dann wirklich Blödsinn ist, > hab ich eben Pech gehabt und werde etwas anderes probieren. Hier mal als Vorschlag mein Drehzahlregler mit "echter" Phasenanschnitt-Steuerung: Beitrag "Vorstellung Drehzahlregler mit Triac in Steckergehäuse" Gruß Dietrich
Danke Dietrich, Dietrich L. schrieb: > leluno schrieb: ... > Hier mal als Vorschlag mein Drehzahlregler mit "echter" > Phasenanschnitt-Steuerung: > Beitrag "Vorstellung Drehzahlregler mit Triac in Steckergehäuse" > > Gruß Dietrich wenn ich leluno bisher richtig verstanden habe ist es genau das was er braucht, sogar mit ATMega8 ;-)
Hallo Dietrich, Dietrich L. schrieb: ... > Hier mal als Vorschlag mein Drehzahlregler mit "echter" > Phasenanschnitt-Steuerung: > Beitrag "Vorstellung Drehzahlregler mit Triac in Steckergehäuse" > > Gruß Dietrich wo setzt Du den Drehzahlregler ein? Benutzt Du den nur für den Lüfter, oder hast Du den inzwischen auch an anderen Geräten benutzt? Die Geschwindigkeit misst Du mit einer Hall-Sonde, dadurch hast Du die Möglichkeit einer Lastregeleung. Bei meiner Nähmaschine wollte ich die ursprünglichen Stecker nicht ändern. Bisher habe ich nur in dem Fußpedal Änderungen vor genommen und ein neues Kabel an das Pedal gebaut um den Null-Leiter mit rein zu bekommen. Eine Drehzahlmessung habe ich nicht geplant. Statt dessen möchte ich Lastwechsel über die Änderung der Stromaufnahme des Motors messen und ausgleichen. Für die zweite Nähmaschine ist das aber total egal. Da ist eh keine Elektrik mehr dran und ich könnte da einen Sensor auf den Motor bauen, oder gleich die Nadelstiche zählen ...
Wolfgang Heinemann schrieb: > wo setzt Du den Drehzahlregler ein? Benutzt Du den nur für den Lüfter, Ja, nur bei meinem "Cinni". Und der war in den letzten Wochen auch sehr aktiv ;-)) Gruß Dietrich
Dietrich L. schrieb: > Wolfgang Heinemann schrieb: >> wo setzt Du den Drehzahlregler ein? Benutzt Du den nur für den Lüfter, > > Ja, nur bei meinem "Cinni". Und der war in den letzten Wochen auch sehr > aktiv ;-)) > > Gruß Dietrich das kann ich mir vorstellen! Auf jeden Fall danke ich Dir das Du das Projekt mit allen geteilt hast. Das ist wirklich gut!
> Hier mal als Vorschlag mein Drehzahlregler mit "echter" > Phasenanschnitt-Steuerung: > Beitrag "Vorstellung Drehzahlregler mit Triac in Steckergehäuse" Der verfolgt natürlich den soliden Ansatz, die Drehzahl echt zu erfassen und zu regeln. Allerdings sind Kondensatormotoren aus Lüftern nicht wirklich für Phasenanschnitt geeignet, sei froh wenn das SSR nicht kaputt geht. Der Universalmotor der Nähmaschine passt aber gut. Die Platine mit dem uC hätte ich mit Abstandsbolzen auf die Leistungsplatine gesetzt, dann hat man keine Schrauben in der Frontplatte.
Angehängte Dateien:
-

pfaff96.png
6,8 KB
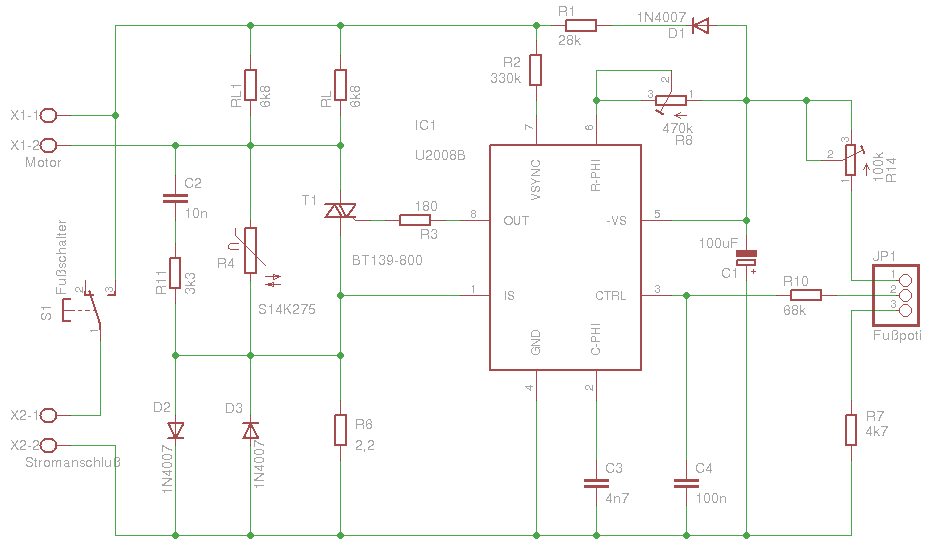
Hallo zusammen, nach einer Zwangspause beschäftige ich mich wieder mit der Phasenanschnittsteuerung mit U2008B. Ich habe den Schaltplan um Schutzschaltungen erweitert. Zum einen gibt es ein Snubber-Netzwerk, einen Varistor und zwei Schutzdioden. Die Schutzdioden habe ich eingebaut damit die Spannung über Pin1 des IC nicht über die 1V Maximalspannung, die an dem Pin erlaubt ist, steigen kann. Allerdings kommen mir Zweifel an der Konstruktion. Durch die Schutzschaltung für den Triac können ohe Ströme durch R8 auftreten. Dadutch kann dort eine hohe Spannung abfallen. Die kann ich mit den Dioden wider töten. Allerdings sind das kurze Spannungsspitzen. Zum Einen könnte es ein das ich hier schnellere Dioden brauche, als die eingezeichneten 1N4007. Shottky-Dioden wären wohl angebracht, die haben aber eine geringere Durchlassspannung. 250mV brauche ich mindestens an Pin1 damit die Stromregelung funktionieren kann, laut Datenblatt. Ich könnte jeweils zwei Shottky-Dioden in Serie schalten. Ich glaube aber ich denke zu kompliziert. Ist es möglich durch einen anderen Aufbau die Schaltung zu vereinfachen und trotzdem einen sicheren Betrieb zu garantieren, also das die Spannung an Pin1 nicht über die 1V gehen kann? Das Snubber-Netzwerk ist übrigens noch nicht dimensioniert. Nach dem ich viel zu dem Thema gelesen habe muss ich wohl erst einmal die Induktivität des Motors bestimmen um ein Netzwerk berechnen zu können. Es geht natürlich auch mit Try-And-Error und Messungen mit dem Oszilloskop. Das mache ich aber erst dann wenn ich die Induktivität des Motors nicht messen kann.
R11 und R4 kommen an X2-2, RL, RL1, D2 und D3 sind möglich aber überflüssig.
Hallo MaWin, danke. Die Dioden möchte ich in der Tat gerne weg lassen. Das man R11 und R4 über T und R6 legen kann habe ich mir auch schon gedacht. Das Problem wäre dann aber das der Strom, der über den Schutzkomponenten entsteht trotzdem zu einem Spannungsabfall über R6 führen würde. Ist das nicht genau so schädlich? Pin 1 verträgt maximal +-1 Volt gegenüber Pin 4, laut Datenblatt. Mein eigentliches Problem ist das der Motor eine geringe Stromaufnahme hat und deshalb der Haltestrom des Tricas zu früh unterschritten wird, darum die RLs. Die erzeugen eine Grundlast. Ich habe mir noch BT134W besorgt. Mit denen brauche ich keine Grundlast, die habe ich aber noch nicht in der Schaltung getestet. Die Dioden habe ich drin weil R6 relativ groß ist um einen genügend großen Spannungsabfall für die Kompensation der Lastwechsel zu haben. Durch den großen R6 handle ich mir dann aber wieder das Problem mit den Spannungsspitzen ein ...
Angehängte Dateien:
-

Scan20001.PNG
460 KB
anbei die funktionierende mosfet-Schaltung für eine Halbwelle. Mit einem zweiten Mosfet in Gegenrichtung statt der Diode könnte man sicher auch Wechselstrom schalten. Die Ansteuerung erfolgt über LDR/LED und ist damit galvanisch getrennt.
Angehängte Dateien:
-

20130830052714.jpg
35 KB -

20130830052759.jpg
20 KB -

20130830052835.jpg
20 KB


die Motorsteuerung funktioniert: Die Drehzahl wird über einen Taster mittels Timer gemessen und auf rund 5 sec je Stich eingeregelt. Dabei werden auch unterschiedliche Belastungen beim Nähen halbwegs ausgeglichen. Die Singer Class29 ist knapp 120 Jahre alt. Sie vernäht 10er Fäden (10m Faden wiegt ein Gramm). Die Mechanik ist wegen Quetschungsgefahr offensichtlich nicht ganz ungefährlich und mit Vorsicht zu handhaben. Nächste Schritte sind die Umstellung von ARM auf ATMEGA und eventuell die Regelung des Motors über TRIAC statt MOSFET.
Hallo, leluno schrieb: > die Motorsteuerung funktioniert: Die Drehzahl wird über einen Taster > mittels Timer gemessen und auf rund 5 sec je Stich eingeregelt. Dabei > werden auch unterschiedliche Belastungen beim Nähen halbwegs > ausgeglichen. Super! Kannst Du mal Details zu dem Aufbau posten ... das interessiert mich. Ich habe ja noch die zweite, alte Nähmaschine, die möchte ich nicht mehr mit dem U2008 bauen, sondern auch mir Mikroprozessor. Bei der zweiten Nähmaschine muss ich mir erst einen Motor dran bauen, so wie Du es bei Deiner Singer auch gemacht hast. > > Die Singer Class29 ist knapp 120 Jahre alt. Sie vernäht 10er Fäden (10m ... > Nächste Schritte sind die Umstellung von ARM auf ATMEGA und eventuell > die Regelung des Motors über TRIAC statt MOSFET. Warum möchtest Du auf TRIAC wechseln? Wen Du zwei MOSFETs verwendest kannst Du das doch genau so gut aufbauen. Wie hast Du das Problem der Induktionsspitzen gelöst? Es treten beim Schalten des Motors ja recht hohe Spitzen auf, die man irgendwie (z.B. Snubber Netzerk) von der Elektronik fern halten muss. Was setzt Du da ein und wie hast Du es dimensioniert?
Angehängte Dateien:
-

pfaff96-2-board.png
6,4 KB -

pfaff96-2-schematic.png
8,4 KB
Neuer Zwischenstand ... Inzwischen habe ich den Schaltplan noch einmal leicht geändert. Der Snubber hängt jetzt, nach MaWins Empfehlung direkt an der Last. Es macht natürlich doch einen Unterschied. Die Spitzen werden jetzt direkt gekappt und der Spitzenstrom, der durch R6 fließen kannst ist deutlich geringer als wenn der Snubber unmittelbar über dem TRIAC liegen würde. Es gibt eine alternative Bestückung mit zwei verschiedenen TRIACs. Mit dem BT139 habe ich bisher immer experimentiert. Der ist aber für meinen Motor überdimensioniert, was erst mal nicht stört. Nur erfordert der auch einen hohen Haltestrom, den mein Motor gar nicht liefern kann. Eine Grundlast erzeugen für den Fall RL1 und RL2. Der zweite TRIAC, BT134W, hat einen sehr viel kleineren Haltestrom. Wenn ich den bestücke können RL1 und RL2 entfallen. Damit der DRC nicht meckert sind beide TRIACS im Schaltplan enthalten. Bestückt wird aber immer nur einer, nie beide Gleichzeitig. Die Platine ist geätzt und Bestückt, aber noch nicht getestet, weil ich immer noch nicht den Snubber final berechnet habe. Mit fehlt noch die Motorinduktivität. Die angegebenen Werte sind aber als grober Daumenwert wohl erst mal ok. Der erste Aufbau ist mit BT134W bestückt, ohne Grundlastwiderstände. Fotos vom finalen Aufbau folgen nach den Tests.
leluno schrieb: > Die Singer Class29 ist knapp 120 Jahre alt. Sie vernäht 10er Fäden (10m > Faden wiegt ein Gramm). Die Mechanik ist wegen Quetschungsgefahr > offensichtlich nicht ganz ungefährlich und mit Vorsicht zu handhaben. auf so einem ding hab ich ledermanschetten für prothesen genäht… damals ohne motor nur mit pedalantrieb. ein wirklich feines teil :)
Angehängte Dateien:
-

Unbenannt.PNG
160 KB -

Unbenannt.JPG
10 KB -

20130830093209.jpg
27 KB


Das rechte Foto zeigt meinen Aufbau. Ich habe allenfalls Grundkenntnisse in Halbleitertechnik. Dieses ist meine erste Mosfet- Schaltung. Die von Dietrich vorgestellte Drehzahlsteuerung ist wahrscheinlich perfekt, aber hardwaremäßig von mir nicht zu realisieren. Auch die Schaltung mit dem U2008 übersteigt meine Möglichkeiten, da ich nur mit Streifenrasterplatinen arbeiten kann. Je weniger Bauteile, umso besser. Die oben dargestellte linke Schaltung arbeitet über Veränderung der Spannung. Es kommt zu keinem Spannungsabbruch und daher wohl auch nicht zu Spannungsspitzen durch Induktion. Das Problem ist, dass der Mosfet trotzdem noch recht heiß wird. Ich nehme an, dass die Motorleistung durch den Widerstand des Mosfets gesteuert wird. Die rechte Schaltung arbeitet mit konstanter Spannung und PWM über Optokoppler. Der Verschleiß an Mosfets war recht hoch. Ursache sind wahrscheinlich die Induktionsströme beim Spannungsabriss. Die Schaltung ist so leider unbrauchbar. Das Foto in der Mitte zeigt einen zerlegten Schalter einer Bohrmaschine mit Triac. Er besteht auch nur aus 6 Bauteilen, erfüllt die Anforderungen an eine Drehzahlsteuerung bei nur geringer Wärmeentwicklung perfekt, und ist gegenüber der von mir verwendeten Mosfet-Schaltung eine professionelle Lösung. Dies ist der Grund, warum ich das ganze noch einmal mit einer Triac- Schaltung probieren will.
Angehängte Dateien:
-

Aldi-Maschine-3.jpg
110 KB
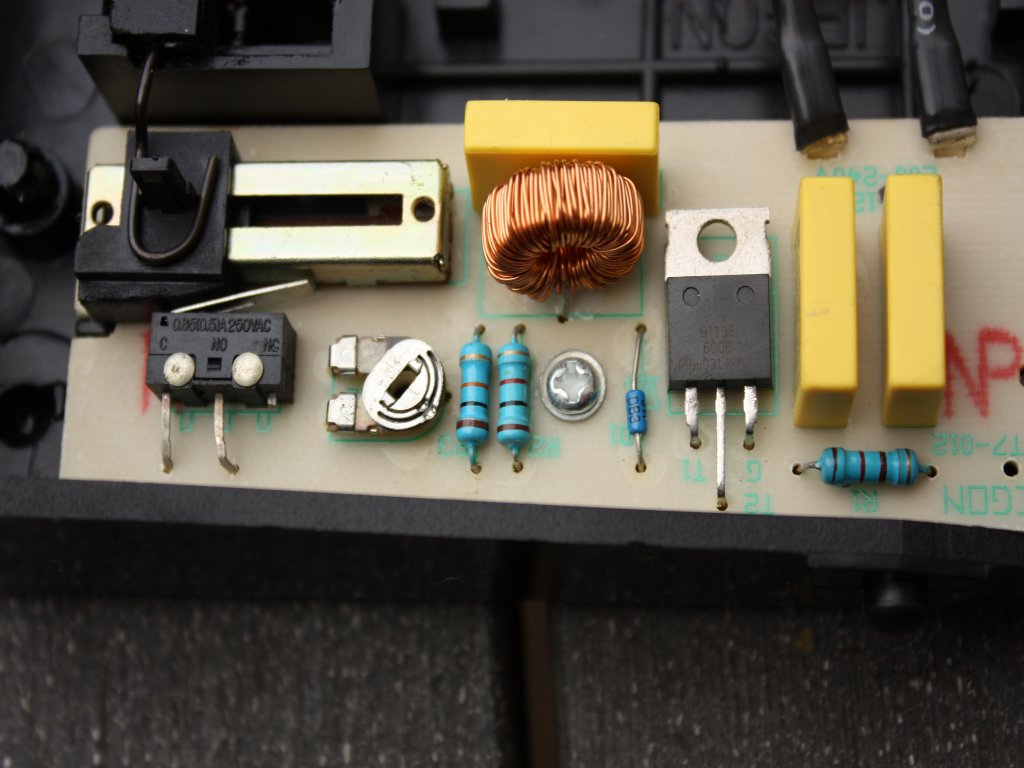
Hi, leluno schrieb: > Das rechte Foto zeigt meinen Aufbau. Ich habe allenfalls Grundkenntnisse ... > U2008 übersteigt meine Möglichkeiten, da ich nur mit > Streifenrasterplatinen arbeiten kann. Je weniger Bauteile, umso besser. Die Testversion habe ich auch auf Lochraster aufgebaut. Das Problem dabei ist nur der geringe Abstand zwischen den Pads. Da muss man mit 230V ein wenig vorsichtig sein. Mit Streifenraster ist das unter Umständen noch kritischer. Das musst Du sauber arbeiten. > Die oben dargestellte linke Schaltung arbeitet über Veränderung der > Spannung. Es kommt zu keinem Spannungsabbruch und daher wohl auch nicht > zu Spannungsspitzen durch Induktion. Es wird trotzdem zu Induktionsspitzen kommen weil Du nicht auf die Netzfrequenz Synchronisierst und den FET zu beliebigen Zeiten an und aus schaltest. Es kann sein das die Spitzen bisher nicht zum Tod des FET geführt haben weil er ziemlich groß dimensioniert ist. > Das Problem ist, dass der Mosfet > trotzdem noch recht heiß wird. Ich nehme an, dass die Motorleistung > durch den Widerstand des Mosfets gesteuert wird. Das glaube ich nicht. In Deiner Schaltung ist das Problem das Du den FET zu hochohmig ansteuerst. Die Steuerspannung steigt viel zu langsam an. Damit zwingst Du den FET in den Linearbetrieb, was er überhaupt nicht mag. In dem Betrieb fällt viel Leistung im FET ab und er wird heiß. Abhilfe schafft hier nur eine bessere Ansteuerung, am Besten mit speziellen Steuerbausteinen für FETs. Auf jeden Fall musst Du die Gatespannung mit einem Komparator "rechteckig" machen. Dabei ist es auch wichtig das es nicht zu Schwingungen kommt. > Die rechte Schaltung arbeitet mit konstanter Spannung und PWM über > Optokoppler. Der Verschleiß an Mosfets war recht hoch. Ursache sind > wahrscheinlich die Induktionsströme beim Spannungsabriss. Die Schaltung > ist so leider unbrauchbar. Nein, auch bei der Schaltung sehe ich das Problem in der Gate-Ansteuerung. Es kann sein das Du sehr ungünstige Spannungsverhältnisse gewählt hast und der FET wieder in den Linearbetrieb gezwungen wurde. Die Ansteuerung ist wieder sehr hochohmig was zu Problemen führt da die Schaltflanken durch die Gate-Kapazität des FET abgeschliffen werden. Ausserdem begrenzt due die Gatespannung nicht. Zu viel Gatespannung killt einen FET recht schnell. Ans gate solltest Du auf jeden Fall eine Z-Diode hängen damit die Spannung nicht über die maximal erlaubte Gatespannung steigt. Auf das Gate kannst Du auch Induktions-Spannungen vom Motor bekommen haben. Wenn Du selbst eine Ansteuerschaltung entwirfst wird das sehr schnell komplex. Am Besten ist da wirklich ein Ansteuer-IC zu verwenden. > Das Foto in der Mitte zeigt einen zerlegten Schalter einer Bohrmaschine > mit Triac. Er besteht auch nur aus 6 Bauteilen, erfüllt die > Anforderungen an eine Drehzahlsteuerung bei nur geringer > Wärmeentwicklung perfekt, und ist gegenüber der von mir verwendeten > Mosfet-Schaltung eine professionelle Lösung. Dies ist der Grund, warum > ich das ganze noch einmal mit einer Triac- Schaltung probieren will. Diese Steuerungen sind recht einfach aufgebaut. Was die nicht können ist, die Motorgeschwindigkeit bei Laständerung nach zu steuern. In einer Aldi-Nähmaschine habe ich solch eine Schaltung gefunden, die natürlich auch funktioniert, siehe angehängtes Bild.
> Das rechte Foto zeigt meinen Aufbau. Ich habe allenfalls Grundkenntnisse > in Halbleitertechnik. Dieses ist meine erste Mosfet- Schaltung. Kompletter Schrott. Der Motor bekäme auch bei "Vollgas" nur 50% der Leistung und wird mit Gleichstrom betrieben, was seine Spulenmagnetisierung gar nicht mag. Vergiss das schnell, bau was ordentliches, beispielsweise die U2008 Schaltung mit TRIAC.
Kommentare von MaWin machen keinen Spaß. Sie sind arrogant und überheblich. Die Reduzierung auf halbe Leistung ist gewollt, weil mir die Nähmaschine bei voller Leistung um die Ohren fliegt. Ersetzt man die Diode durch einen Brückengleichrichter, hat man nahezu die volle Spannung. Das ist aber nicht gewollt weil das vorgegebene Ziel ist, die Maschine so langsam wie nur möglich laufen zu lassen. Der Nähmaschinenmotor muss als Universalmotor damit leben, dass er sowohl mit Wechselstrom wie auch mit Gleichstrom betrieben werden kann. Ob er diese Betriebsarten mag, ist völlig egal. Wahrscheinlich mag er überhaupt keine Beanspruchung, weil schließlich nur seine Kohlen abgenutzt werden. Im übrigen habe ich Zweifel, ob die abgeschnittene Halbwelle sich in Bezug auf den Magnetismus überhaupt wie "Gleichstrom" verhält. Die von mir vorgestellte Regelung funktioniert und ist schon deswegen kein Blödsinn. Mann kann über Vor- und Nachteile diskutieren. Nachteil ist die Wärmeentwicklung im Mosfet. Vorteil ist der äußerst geringe Schaltungsaufwand. Weiterer Vorteil ist, dass die Steuerung über einen avr noch ganz andere Möglichkeiten eröffnet als der U2008. Man kann die Motorleistung nach der tasächlichen Beanspruchung der Nähmaschine regeln. Beim Anheben des Nähfußes wird eine starke Eisenfeder beansprucht. Sinnvollerweise wäre dann die Motorleistung größer als beim Absenken des Nähfußes. Frage an alle - außer MaWin - Kann ich die Belastung des Mosfets durch Induktion dadurch reduzieren, dass ich zwei Mosfetts "parallel" (D-S-D-S) hintereinander schalte und die Gates verbinde? Damit müßte sich die Belastung des Mosfets auf einfache Weise halbieren lassen.
Angehängte Dateien:
-

20130902182619.jpg
20 KB

inzwischen ist das ssr angekommen. Über pwm angesteuert läuft der Motor nach Ausprobieren verschiedener Frequenzen inwischen ausreichend rund. Leichte Unregelmäigkeiten werden durch die Trägheit der angetriebenen Masse ausreichend ausgeglichen. Die vorgegebene Stichsequenz wird durch das Regelprogramm gut eingehalten. Das SSR hat trotz 25A Nennleistung mit dem 70-Watt-Motor keine Probleme. Das Hardwareproblem ist für mich damit ausreichend gelößt.
Angehängte Dateien:
-

pfaff96-las-schematic.png
7 KB -

pfaff96-last-board.png
7,2 KB -

pfaff96-last-einbau-1.jpg
240 KB -

pfaff96-last-einbau-2.jpg
130 KB -

pfaff96-last-einbau-3.jpg
190 KB
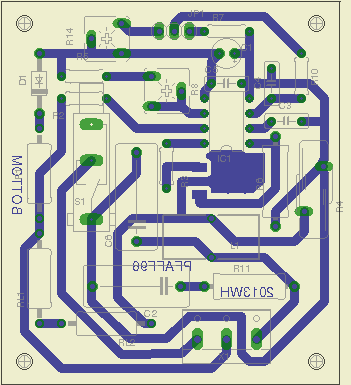

Hallo zusammen, nach langer Zeit möchte ich ein Fazit des Projektes abgeben. Letztendlich habe ich einge Bauteile vernichtet und dabei gelernt dass es wichtig ist richtig zu Entstören. Ohne das Entstörnetzwerk bestehend aus C2, C6, R11 und L1 gibt nach kurzer Betriebszeit das IC den Geist auf. Inzwischen habe ich einiges genäht und bin mir sicher das die Schaltun stabil arbeitet. Mit der Motorregelung bin ich immer noch nicht zufrieden. Ich habe eigentlich erwartet dass die Stromregelung des U2008 dafür sorgt dass der Motor sanft anläuft. Das funktioniert zwar einigermaßen, das Fußpedal reagiert in einem gewissen Lastbereich allerdings recht Sprunghaft. Ich werde wohl noch ein wenig mit den Widerstandswerten in der Schaltung herumprobieren müssen. Alles in Allem finde ich, gemessen am Aufwand, das Ergebnis nicht befriedigend. Wenn ich das Ganze gleich mit einem Mikroprozessor aufgebaut hätte wäre ich vermutlich schneller zum Ziel gekommen und könnte das Stellverhalten besser auf das Lastverhalten des Motors abstimmen. Mit dem Layout bin ich ebenfalls noch nicht zufrieden. Die Leiterbahnen liegen an einigen, kritischen Stellen zu nahe zusammen. Es ist wohl sinnvoller mit Drahtbrücken zu arbeiten als unbedingt alles auf einer einseitigen Platine unterzubringen. Mechanisch bin ich bei der Platinengröße und der Anordnung einiger Bauteile eingeschränkt (z.B. dem Fußschalter). Zum Schluss möchte ich mich bei allen Bedanken, die mir Hinweise für den Aufbau gegeben haben. Jo danke ich besonders für das Schiebepoti ... das Teil funktioniert gut und der mechanische Aufbau ist durch die Verwendung dieses Potis sehr einfach geworden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.