Hallo zusammen,
ich versuche mit meinem MSP430F5438 mit einem MCP2515 CAN-Controller zu
kommunizieren. Die Verdrahtung steht auch schon und ich konnte bisher
noch keine Fehler identifizieren.
Ich verwende UCA1 als Hardware-SPI. Die Initialisierung läuft so ab:
Kurz zur Pin-Belegung (Mehr zu meiner Beschaltung findet ihr
hier:Beitrag "[MSP430] Starthilfe zum MCP2515 CAN-Controller" )
UCA1SOMI - P5.7
UCA1SIMO - P5.6
UCA1CLK - P3.6
UCA1STE - P5.5
1
voidInit_UCA1(void)
2
{
3
P5SEL|=0xC0;// Activate UCA1SOMI, UCA1SIMO, UCA1STE is GPIO
// TI Mode 0,0 != Motorola Mode 0,0: Clock Polarity is inversed, so you have to set UCCKPL
16
// 0x69 = 0110 1001 = Inactive State is High, MSB first, 8-Bit Data, Master Mode, 3-Pin SPI, Synchronous Mode
17
18
UCA1CTL1|=0x80;//clock source - SMCLK
19
// 0x80 = 1000 0000
20
21
prescaler=OSC_FREQ/MCP_BAUDRATE;
22
UCA1BR0=prescaler%256;
23
UCA1BR1=prescaler/256;
24
25
UCA1CTL1&=~(0x01);//UCSWRST = 0 (reset state disable)
26
}
27
28
// Anmerkung: OSC_FREQ = 18000000
29
// Anmerkung: MCP_BAUDRATE = 1000000
Nach der Initialisierung wird in einer while-Schleife versucht mit dem
Controller zu reden. Es wird versucht der Status auszulesen und das
Resultat ist immer 0.
Ich bin sehr neu in dieser Materie, aber ich habe mir die Geschehnisse
mal auf dem Oszilloskop angeschaut. Das Ergebnis seht ihr in den zwei
angehangenen Bildern.
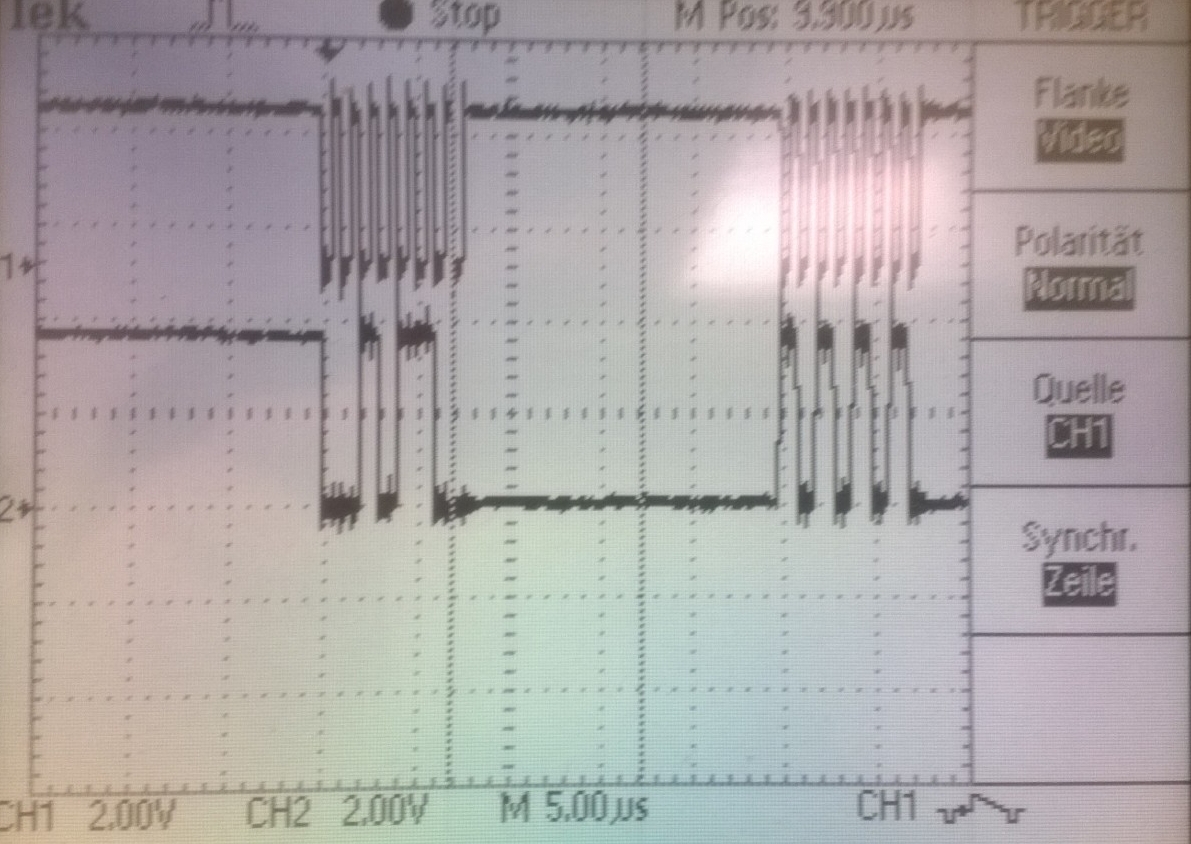
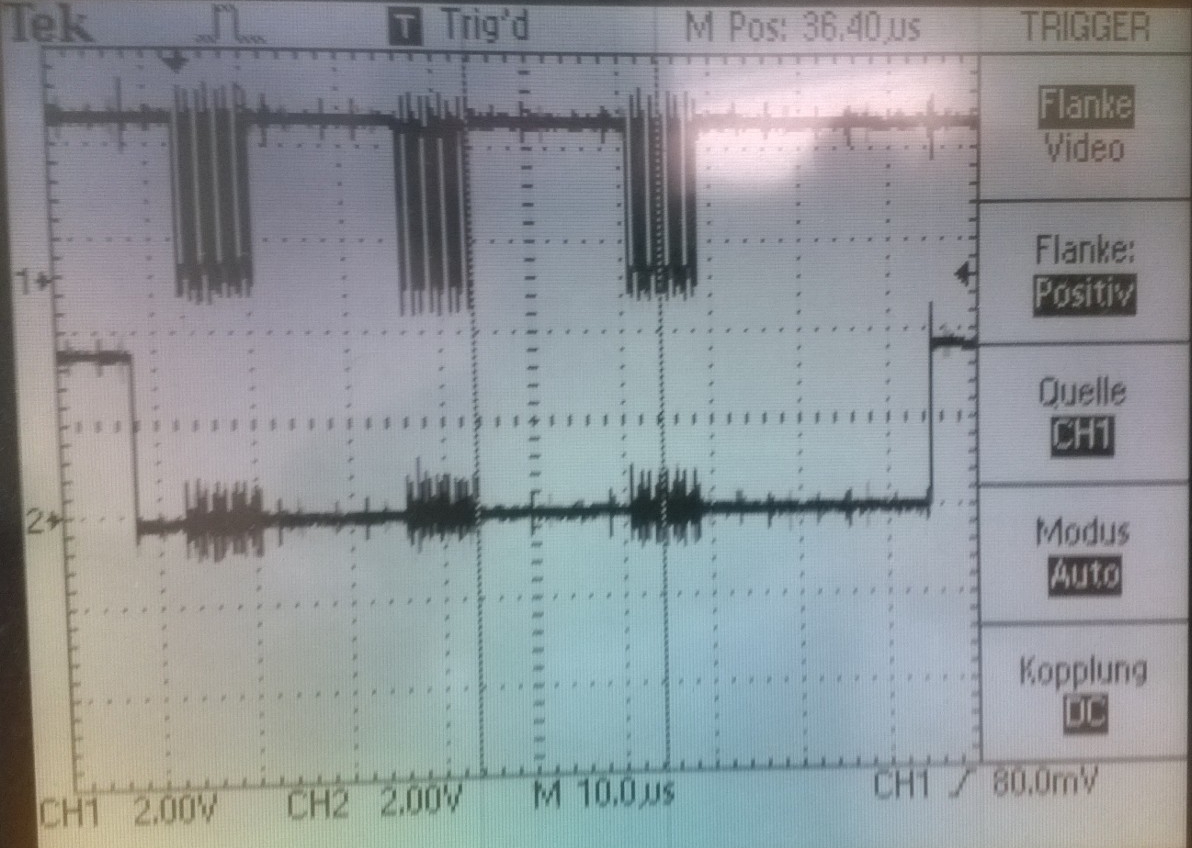
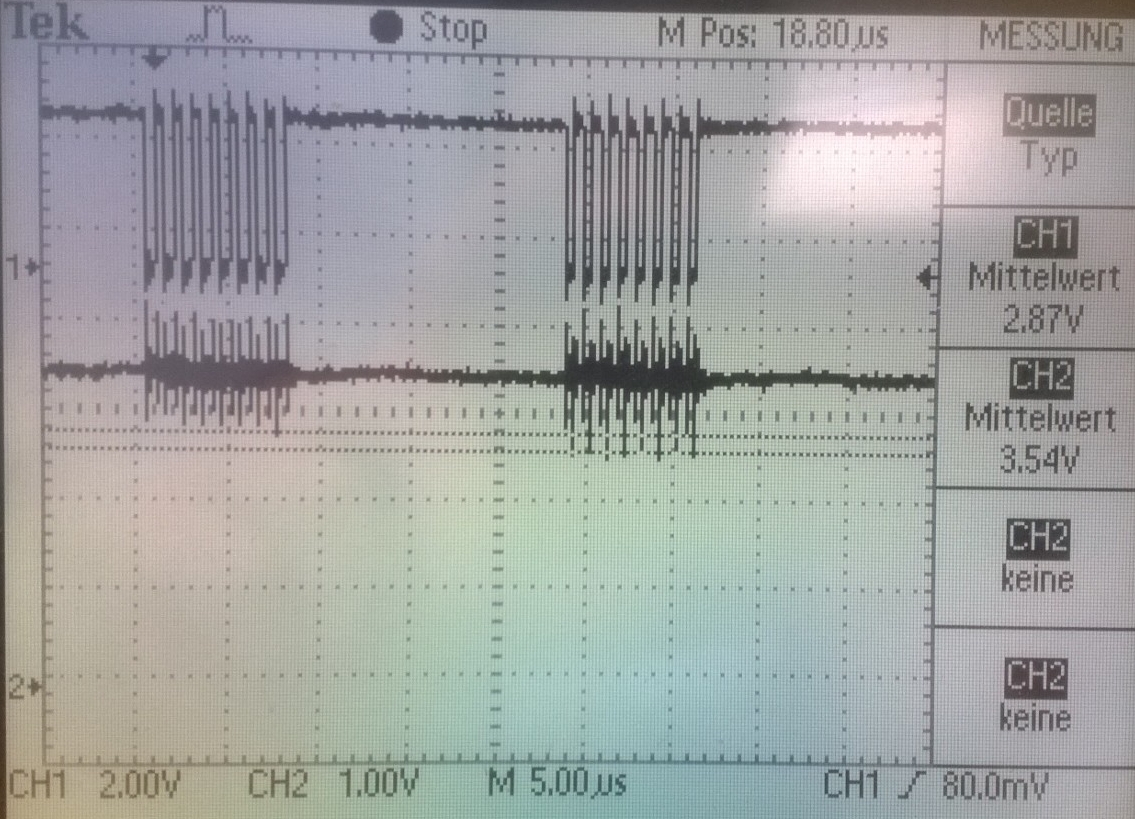
Für mich sieht es so aus, als ob der Clock an sich funktioniert (Ist er
vielleicht zu unsauber?). Auch werden Daten vom MSP an den
CAN-Controller gesendet (Erstes Bild, untere Kurve).
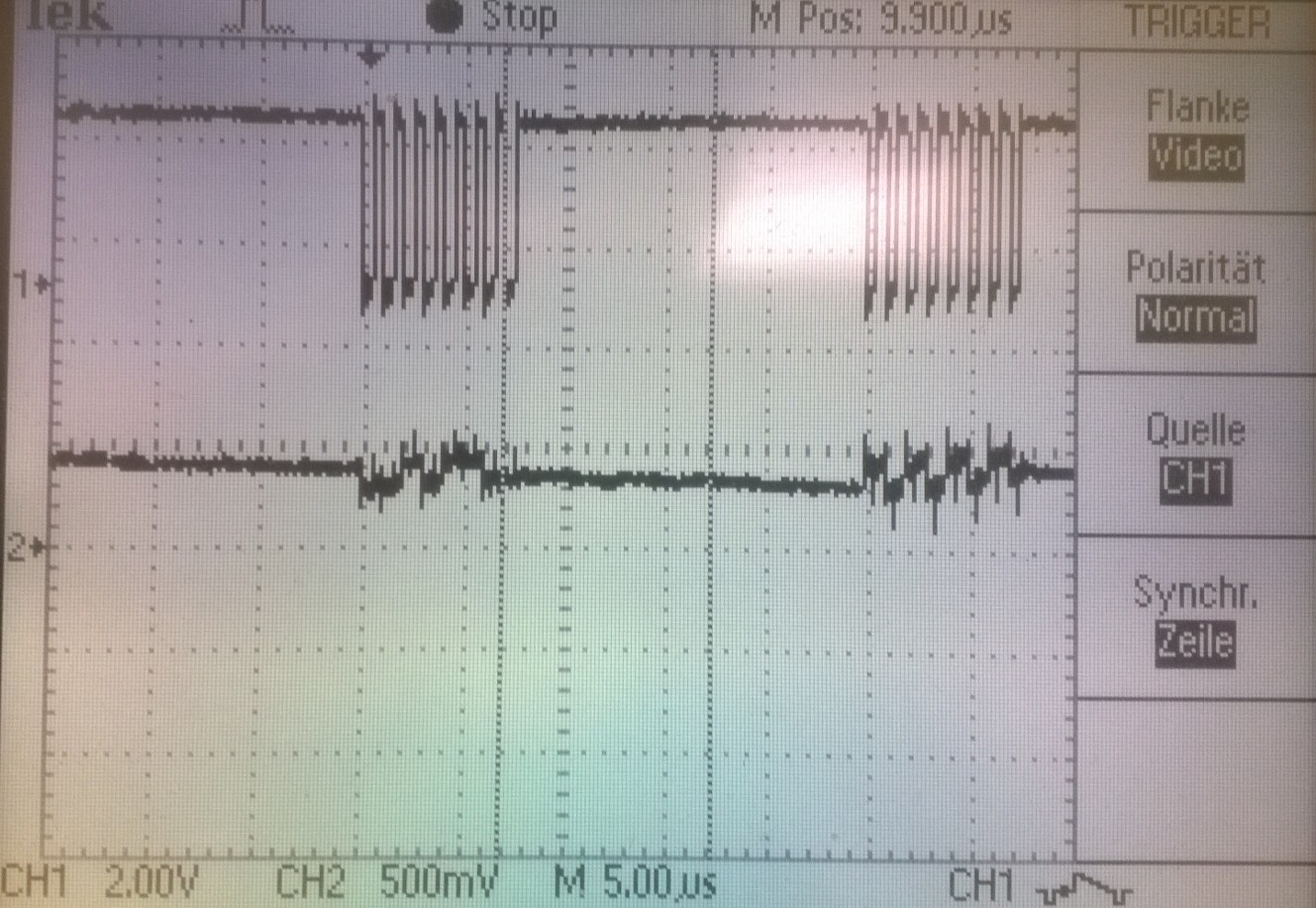
Allerdings antwortet der Controller nicht (richtig). Wenn man sich das
zweite Bild anschaut sieht man wieder die Clock oben und MISO unten.
Achtet man hier auf die Skalierung sieht man ganz klar, dass da zwar
"etwas" ist, aber viel viel viel zu schwach... Der MISO-Pin vom
CAN-Controller hängt übrigens in der Luft, wird also eigentlich nicht
von einer externen Beschaltung beeinflusst...
Ich bin mittlerweile mehr als ratlos... Habt ihr vielleicht irgendwelche
Ideen, warum die Kommunikation nicht funktioniert?
> P5OUT |= 0x20; // UCA1STE to High (Chip select)
Bei den allermeisten Chips ist SPI CS active low.
Für CS = High sieht das Bild CLK_MISO OK aus, etwas Übersprechen hat man
fast immer - MISO ist in dem Fall hochohmig.
In der Init spielt der Chipselect Zustand noch keine Rolle.
Erst wenn der SPI-IC dann benutzt wird muss er low gesetzt sein, aber
der Code fehlt ja noch.
Hallo zusammen!
Erstmal vielen Dank für die weiteren Antworten :-)
Ich schreibe so auf die SPI Schnittstelle:
1
voidwrite_mcp(charaddr,charvalue)
2
{
3
P5OUT&=~0x20;// Chip-Select Low ==> Enable
4
UCA1TXBUF=0x02;// Schreibbefehl
5
while(UCA1STAT&0x01);// Wait SPI Interrupt Flag to be set, i.e. transmission complete
6
UCA1TXBUF=addr;
7
while(UCA1STAT&0x01);
8
UCA1TXBUF=value;
9
while(UCA1STAT&0x01);
10
P5OUT|=0x20;// Chip-Select High ==> Disable
11
}
Und so lese ich (was ja eigentlich dasselbe ist in etwa):
1
charread_mcp(charaddr)
2
{
3
chardata;
4
5
P5OUT&=~0x20;
6
UCA1TXBUF=0x03;// Lesebefehl
7
while(UCA1STAT&0x01);
8
UCA1TXBUF=addr;
9
while(UCA1STAT&0x01);
10
UCA1TXBUF=0xAA;// Dummy-Byte senden
11
while(UCA1STAT&0x01);
12
data=UCA0RXBUF;
13
P5OUT|=0x20;
14
15
DelayMicroSeconds(10);
16
17
returndata;
18
}
Außerdem ist mir noch ein Punkt eingefallen, wobei ich nicht weiß, ob
der wirklich relevant ist, nämlich, dass das Board (Olimex MSP-5438STK)
über USB mit Strom versorgt wird. Könnte es sein, dass der USB-Anschluss
nicht mehr nachkommt? In diesem Bezug habe ich auch mal versucht, das
Board über zwei USB-Anschlüsse zu speisen (USB --> JTAG-Adapter und USB
an die USB-Buchse des Boards). Allerdings hat dies auch keine
Veränderung ergeben...
Ein Bild von der Chip-Select-Line liefer ich euch gleich nach...
EDIT:
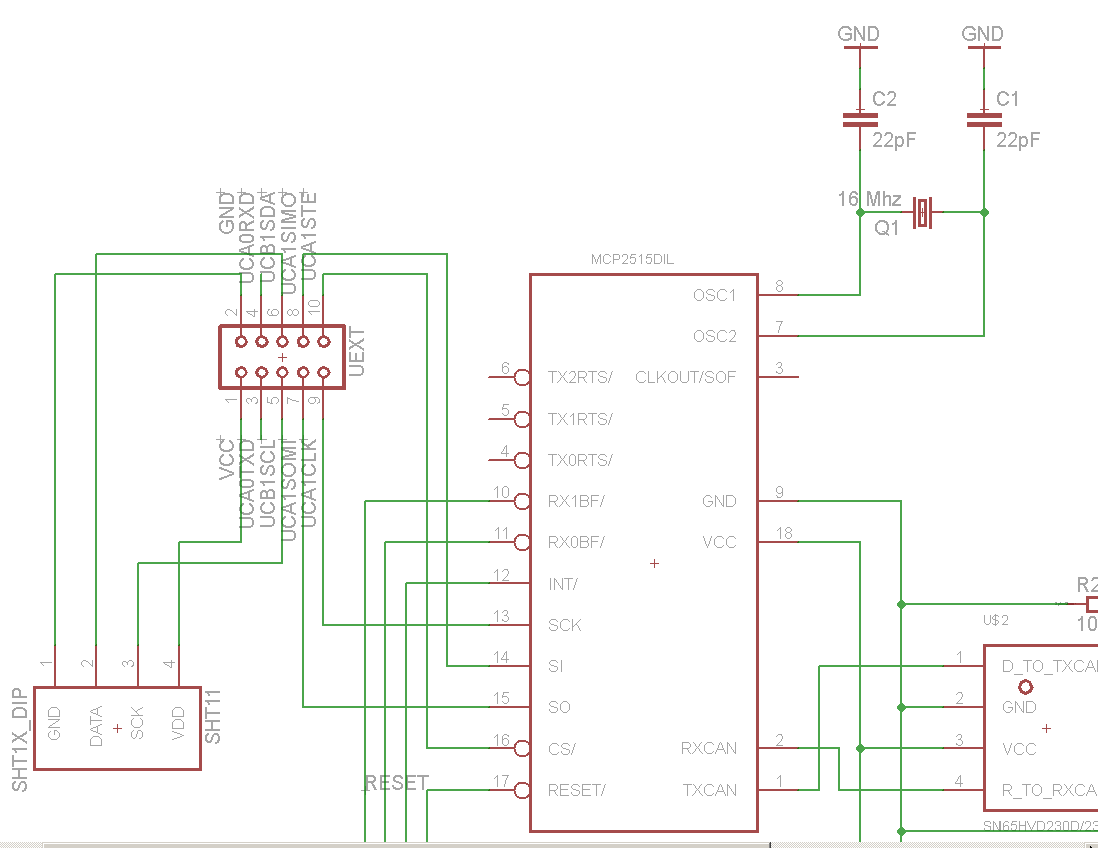
Ich habe euch jetzt mal einen Ausschnitt aus meinem Schaltplan mit den
wensentlichen Komponenten angehangen. Bitter nicht direkt rummeckern,
das ist nämlich das erste Mal, dass ich einen Schaltplan mit EAGLE so
richtig aufgemalt habe...
Außerdem findet ihr jetzt auch ein Bild vom CLK und der CS-Line. Ich
denke dies dürfte das Problem sein, da die CS-Line ja anscheinend nach
jeder Bit-Übertragung den Pegel ändert... Ich frage mich nur warum?
Aufgezeichnet wurde dieses Bild übrigens direkt am Board - das heißt
ohne die zusätzliche angeschlossene Hardware, damit ich Schaltungsfehler
auf meiner Zusatzplatine ausschließen kann (Allerdings sah das Bild
direkt am MCP aufgezeichnet genau so aus).
Wenn ihr noch weitere Informationen braucht, dann meldet euch doch
einfach. Nochmals vielen Dank für euer Engagement :-)
Nochmal Hallo zusammen!
Bisher habe ich den Baustein immer regelmäßig in einer while-Schleife
abgefragt. Das sah in Etwa so aus:
1
voidCAN_Update(void)
2
{
3
volatilecharstate;
4
state=can_state();
5
/*
6
m_Status = can_chk();
7
if (m_Status)
8
{
9
...
10
}
11
*/
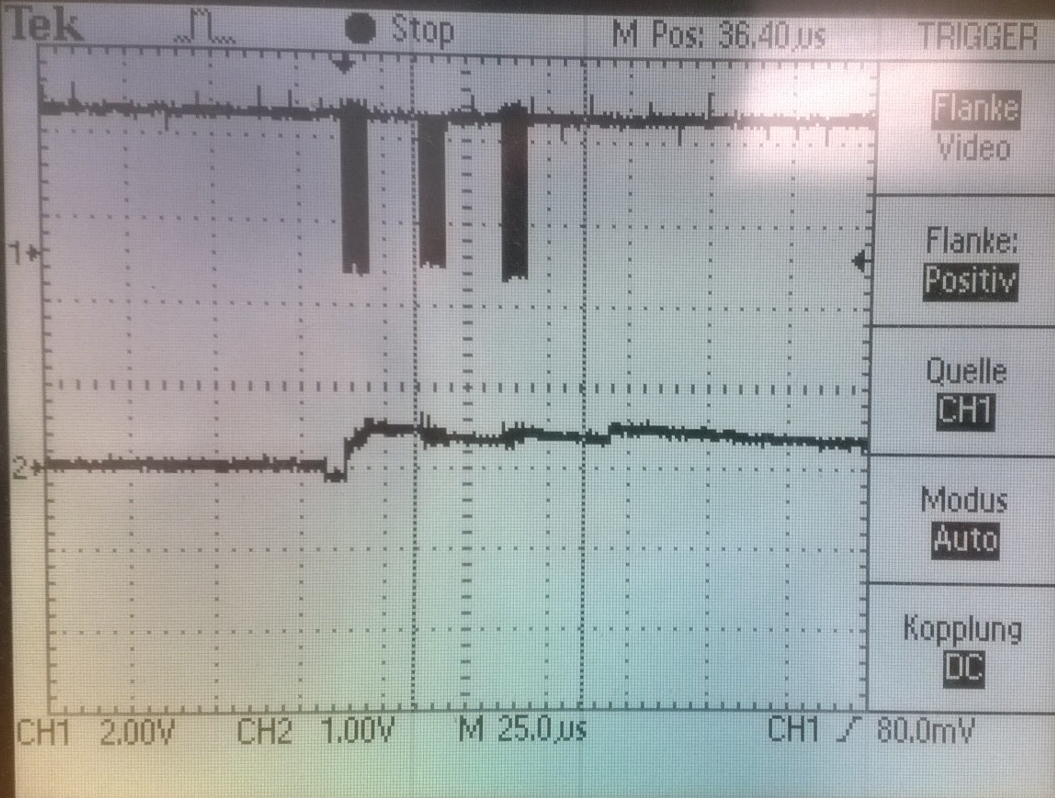
Sobald ich die zweite Abfrage (can_chk()) auskommentiert habe, sieht
meine Chip-Select-Leitung auf einmal viel besser aus. Man sieht
deutlich, wie sie während der Übertragung fast konstant auf GND bleibt,
obwohl auch da leichte Störungen (?) von der Clock-Leitung erkennbar
sind...
Unter denselben Bedingungen, also mit der anständigen CS-Leitung, habe
ich dann auch nochmal ein Bild der MISO-Leitung aufgenommen. Für mich
sieht es so aus, als ob der IC reagieren wollte, aber es irgendwie nicht
so richtig schafft... Danach fällt der MISO-Pegel langsam aber sicher
wieder auf GND ab...
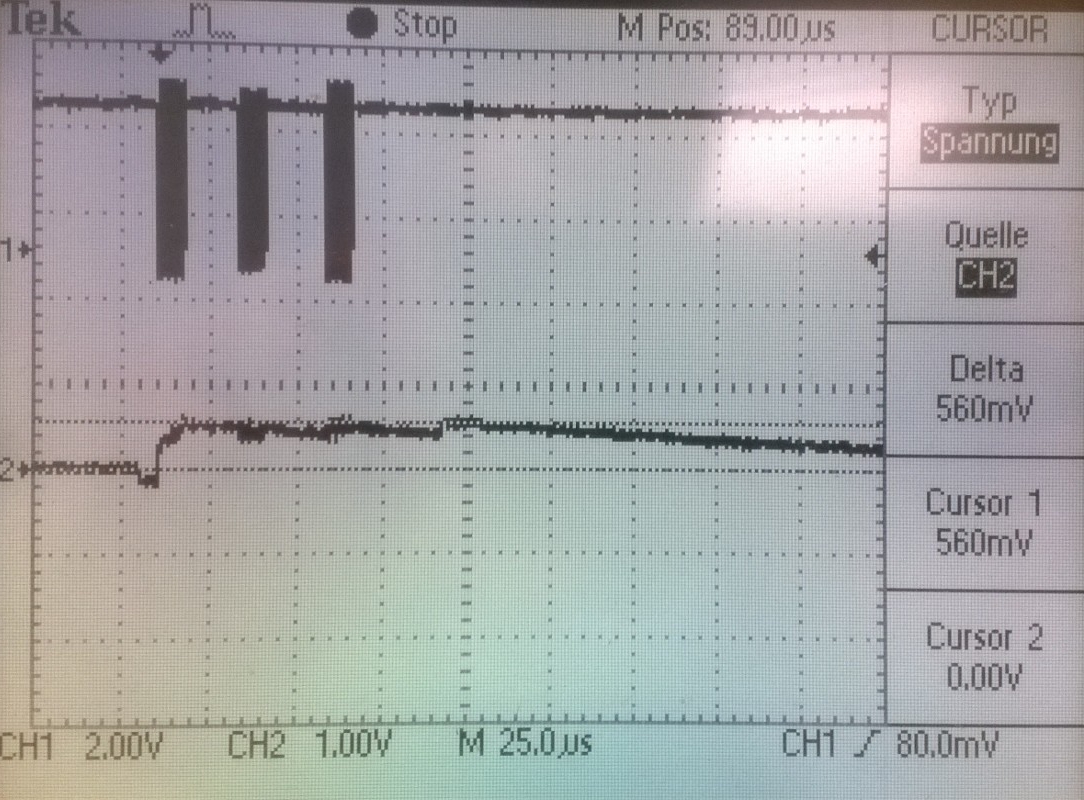
Man beachte beim zweiten Bild wieder den angepassten Wertebereich. Auf
der Y-Achse ist dieser doppelt so hoch aufgetragen für die MISO-Kurve.
Der höchste Peak beträgt aber nur 560mV (dieser wird ungefähr dreimal
annähernd erreicht). Außerdem habe ich zur besseren Darstellung auch die
X-Achse anders skaliert.
EDIT: Ich habe nochmal ein neues Bild unter den gleichen Bedingungen
aufgenommen. Hier sieht man deutlicher, wie der Pegel mit der Zeit immer
weiter abfällt. Außerdem sind hier die Cursors gesetzt, damit ihr mir
den Peak von ca. 560mV auch glaubt ;-)
EDIT2: Um die Stromlimitierung des JTAG-Adapters ausschließen zu können,
habe ich dieselbe Messung nochmal gemacht, wenn das Board direkt über
den USB-Anschluss versorgt wird. Dies macht jedoch keinen Unterschied:
Die Messung ergab genau dasselbe Verhalten...
Nochmal Hallo!
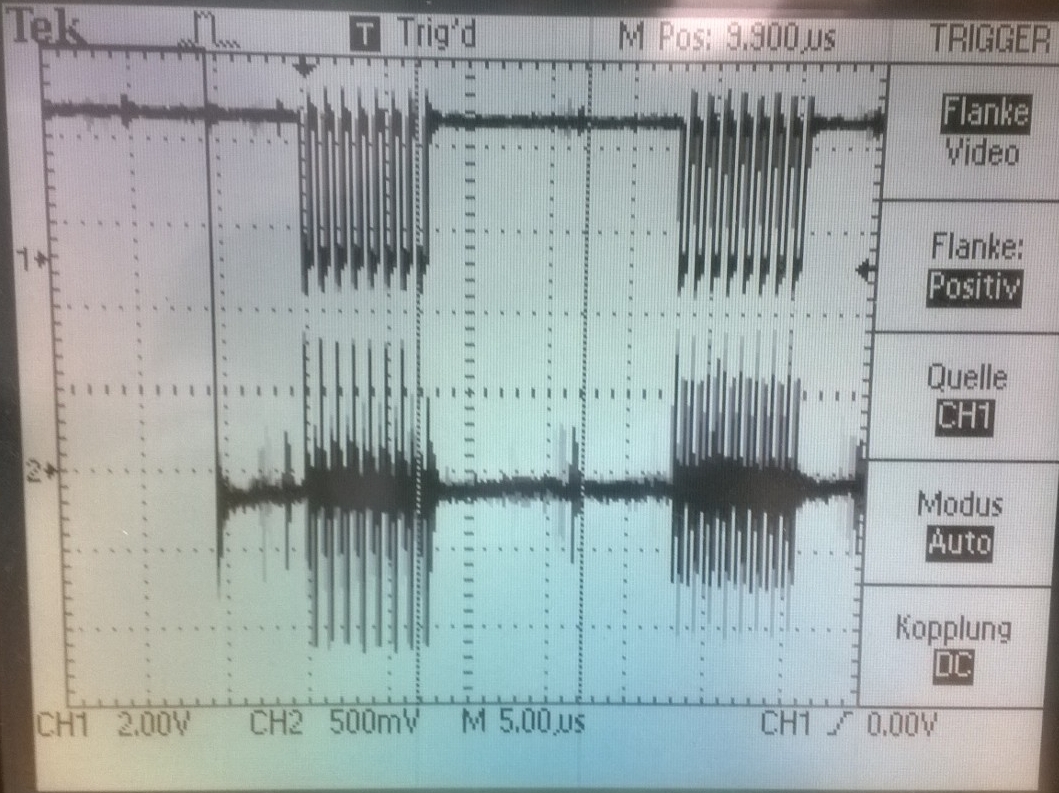
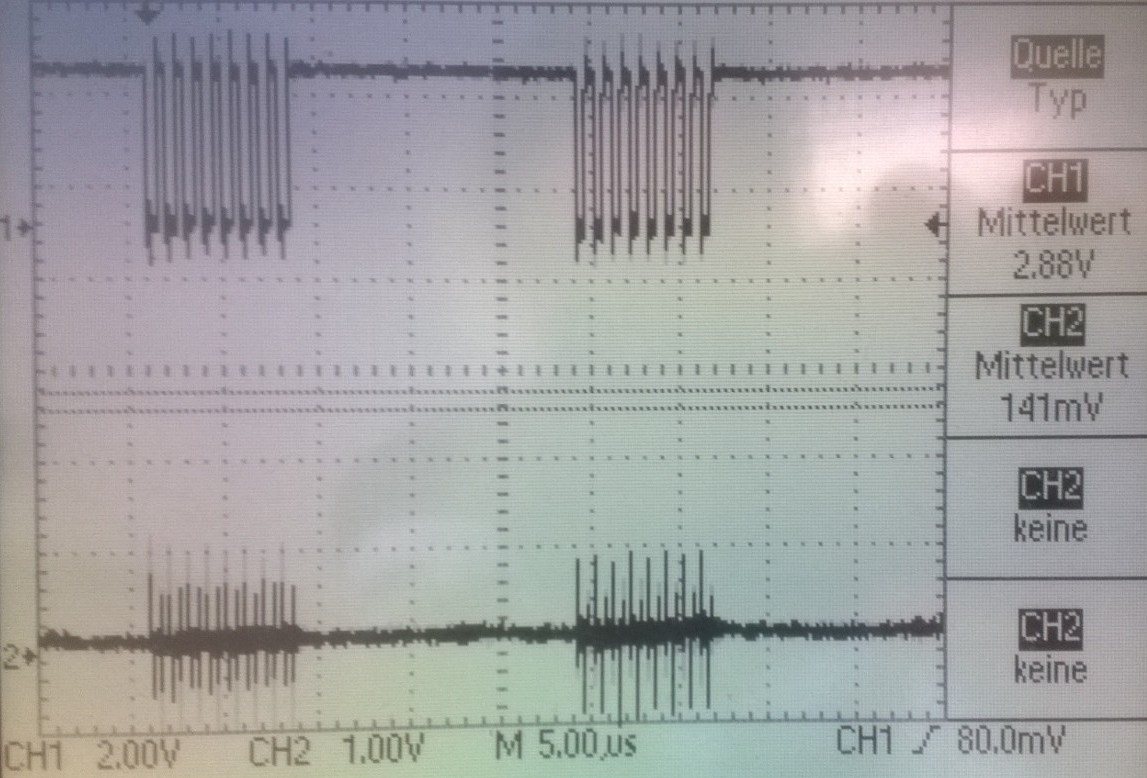
Ich habe jetzt der Vollständigkeit halber auch mal die GND und
VCC-Leitungen zusammen mit der Clock aufgenommen. Die Ergebnisse findet
ihr wie immer im Anhang...
Sind die Schwankungen auf diesen Leitungen im Rahmen?
Viele Grüße,
Roland
Benutzt du Tastköpfe oder nur einfach Laborleitungen zum Messen?
Diese Störungen (Übersprechen des Taktes) sehen ein wenig danach aus.
Keine vernünftige bzw. zu lange Verbindung zum GND der Messleitung->
Überschwinger im Signal und auch gerne Übersprechen. Diese Verbindung
zum GND muss so kurz wie möglich sein.
Oder messe mal ein Signal ohne gleichzeitig auch CLK zu messen.
Hallo zusammen,
ich bin mittlerweile einige Schritte weiter gekommen... Das Problem war
mein Quarz, der wohl nicht richtig geschwungen hat und was ich leider
nicht ordentlich genug überprüft habe :-/
Den Hinweis dazu habe ich hier gefunden:
http://www.microchip.com/forums/m511643.aspx
Nachdem dieses Problem erledigt war, konnte ich nun auch endlich
feststellen, dass der CLKOUT-Ausgang meines CAN-Controllers funktioniert
:-)
Über die Initialisierungsroutine konnte ich feststellen, dass der
CLKOUT-Ausgang deaktiviert wird, sobald man in den Configuration-Mode
geht. Daraus schließe ich, dass der Controller meine SPI-Befehle korrekt
lesen kann.
ALLERDINGS: Ich kann weiterhin nichts lesen... Das alte Problem des
niedrigen, kaum erkennbaren MISO-Pegels bleibt bestehen... Hat jemand
vielleicht eine Idee zu dieser Problematik?
Ich bin mir nicht sicher, ob ich das gemacht habe, was du meinst, aber
wenn ich mit Multimeter an den MISO Pin gehe, dann schwankt die
(Gleich-)Spannung zwischen 0,003V und 0,006V...
Irgendwie finde ich mich sehr stark hier wieder:
Beitrag "SPI-Poblem MISO erreicht Pegel nicht"
Und dort konnte keine Lösung gefunden werden... :-(
Auch hier finde ich dieselbe Problematik wieder - auch ohne Lösung...
Beitrag "MCP2515 sendet kein SO Signal an MISO (SPI)"
Hallo zusammen,
ich möchte hiermit mein Problem als gelöst melden, damit sich keiner
weiterhin den Kopf hierüber zerbricht...
Mein erstes Problem war, wie bereits gesagt, dass mein Quarz nicht
richtig funktionierte. Er war halt doch ein Stück zu weit vom Controller
entfernt. Dass der Quarz ordentlich funktioniert und der Chip "lebt"
erkennt man daran, dass der CLKOUT-Ausgang (ohne Konfiguration, also per
Default) eingeschaltet ist mit einem Divider von 8. Wenn man hier eine
Oszillation messen kann, sollte der Chip an sich funktionieren.
Das SPI-Problem habe ich testweise mit einem externen Pull-Up-Widerstand
versucht zu lösen. Damit konnte ich wunderbar erkennen, dass der
Controller versucht mir zu antworten. Ohne Pull-Up waren nur Änderungen
um die 300mV erkennbar. Mit PullUp wurde die gesamte Breite von 0V-3.3V
angefahren.
Das nächste Problem war, dass ich nichts empfangen konnte, obgleich das
Oszilloskop mir bestätigte, dass da auf jeden Fall Daten auf der Leitung
vorhanden sind...
Ungefähr eine Stunde später fiel mir folgende Zeile im Code auf, nachdem
mein SPI sogar im Loopback-Mode nichts empfangen konnte:
1
[...]
2
while(UCA1STAT&0x01);
3
data=UCA0RXBUF;
4
[...]
Ich denke hierzu muss ich nichts weiter sagen ;-)
Jedenfalls funktioniert es jetzt - auch mit den internen PullUps ;-)
Wieso man jedoch sagt, warum PullUps bei diesem Chip nicht notwendig
wären, bleibt mir weiterhin ein Rätsel...