Hallo,
Ich habe derzeit Probleme eine CAN Kommunikation auf die Reihe zu
bekommen.
Benutzen tue ich die CAN Lib von Fabian Greif
http://www.kreatives-chaos.com/artikel/universelle-can-Bibliothek
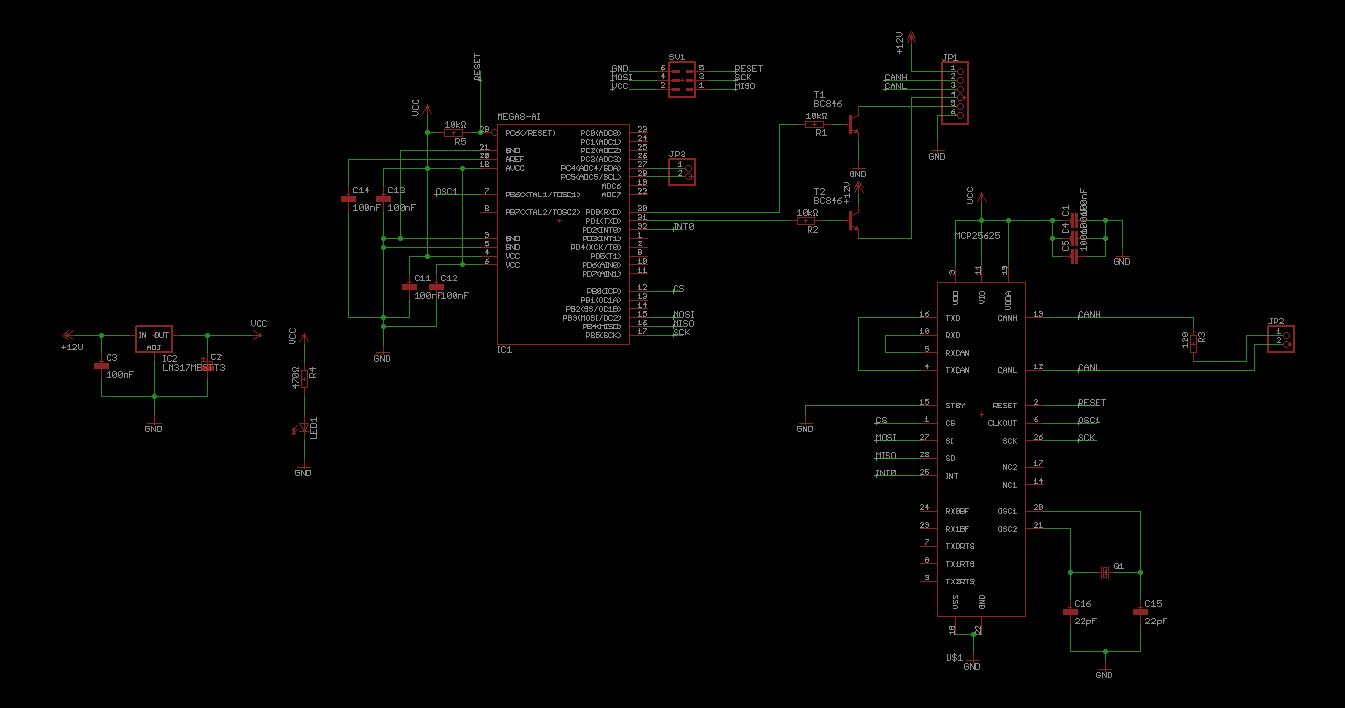
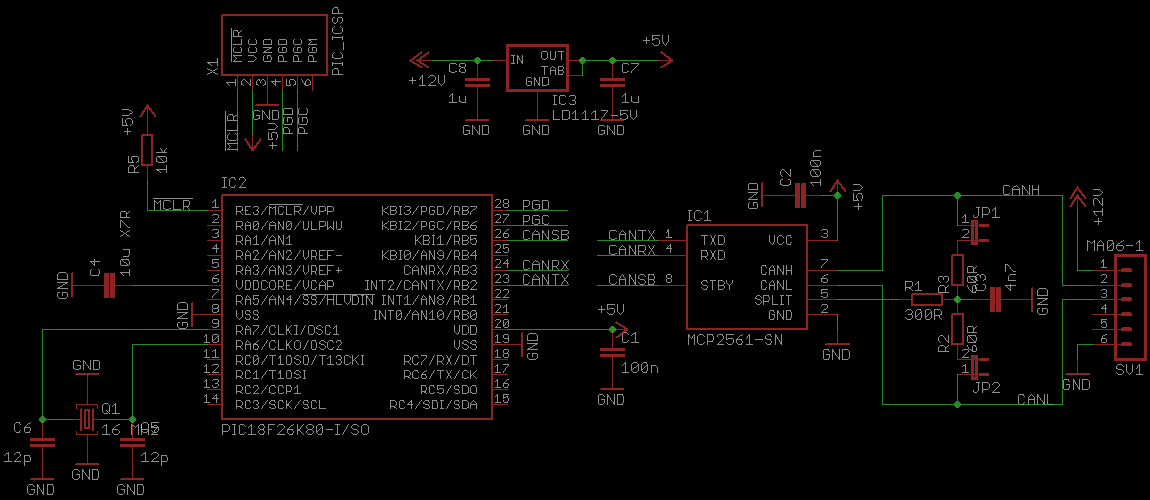
Als Controller nutze ich den MCP25625 anstelle dem MCP2515. Die sind
beide identisch, bis auf das der MCP25625 auch den CAN Transreceiver
inne hat.
Die SPI Kommunikation zwischen dem Atmega168 und dem MCP25625
funktioniert.
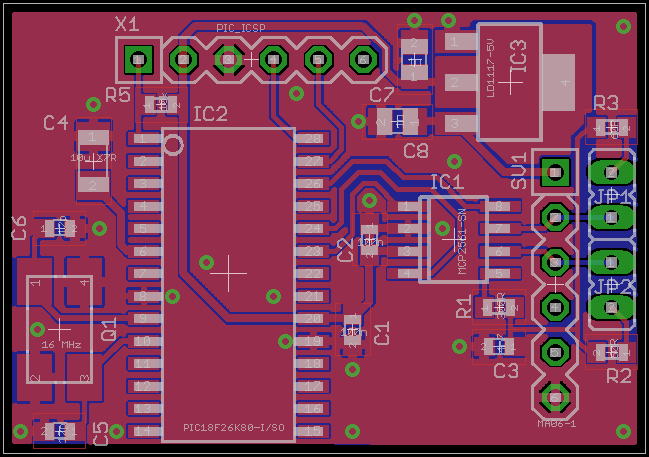
Am CAN-BUS messe ich zwischen CANL und CANH einen Widerstand von 60Ohm.
Gibt es in der Hardware einen gravierenden Fehler, den ich übersehen
habe?
Oder vielleicht ist das Layout der Platine nicht gut.
Für Hinweise und Tipps wäre ich sehr dankbar.
EDIT: Im Schaltplan ist ein ATMega8 vermerkt, es ist aber ein ATMega168
verbaut die mit intern mit 8MHz getaktet werden. Die Externe Taktung aus
dem MCP25625 nutze ich nicht.
EDIT2: Der MCP25625 wird mit 16MHz getaktet
1
#define F_CPU 8000000UL
2
//#define UART_BAUD_RATE 9600
3
4
#include<avr/io.h>
5
#include"i2cmaster.h"
6
#include"MCP23008.h"
7
#include"I2C_LCD.h"
8
#include<avr/pgmspace.h>
9
#include"can.h"
10
#include"uart.h"
11
#include<avr/interrupt.h>
12
13
14
15
16
17
18
19
20
typedefuint8_tprog_uint8_t;
21
22
23
prog_uint8_tcan_filter[]=
24
{
25
// Group 0
26
MCP2515_FILTER(0),// Filter 0
27
MCP2515_FILTER(0),// Filter 1
28
29
// Group 1
30
MCP2515_FILTER_EXTENDED(0),// Filter 2
31
MCP2515_FILTER_EXTENDED(0),// Filter 3
32
MCP2515_FILTER_EXTENDED(0),// Filter 4
33
MCP2515_FILTER_EXTENDED(0),// Filter 5
34
35
MCP2515_FILTER(0),// Mask 0 (for group 0)
36
MCP2515_FILTER_EXTENDED(0),// Mask 1 (for group 1)
Hallo,
habe es nur kurz überflogen aber ich sehe nicht das Stby an dem Can Chip
negiert ist, dh Du hast ihn mit Gnd
auf aus geklemmt.
Lg Sven
Ps ok vergiss es Du schriebst die Spi Kommunikation ist in Ordnung.
Pps: ich habe jetzt noch mal im DB gelesen,
ich verstehe das so, das das Spi Interface weiter läuft,
nur die Module Tx Rx werden abgeschaltet.
Das würde ja genau Dein Problem beschreiben.
Sven K. schrieb:> Pps: ich habe jetzt noch mal im DB gelesen,> ich verstehe das so, das das Spi Interface weiter läuft,> nur die Module Tx Rx werden abgeschaltet.> Das würde ja genau Dein Problem beschreiben.
Hallo Sven, danke fürs schauen.
Das stimmt auch, aber der STBY Pin ist active high. Wenn ich auf Masse
ziehe, dann dürfte er ja nicht im Standby sein, oder?
J. W. schrieb:> Ich würde keinen LM317 als Spannungsversorgung nehmen, zumindest nicht> so, dass er auf 1,25V regelt...
äähhm sorry, mein Fehler..Da ist ein LD1117 5V drinne
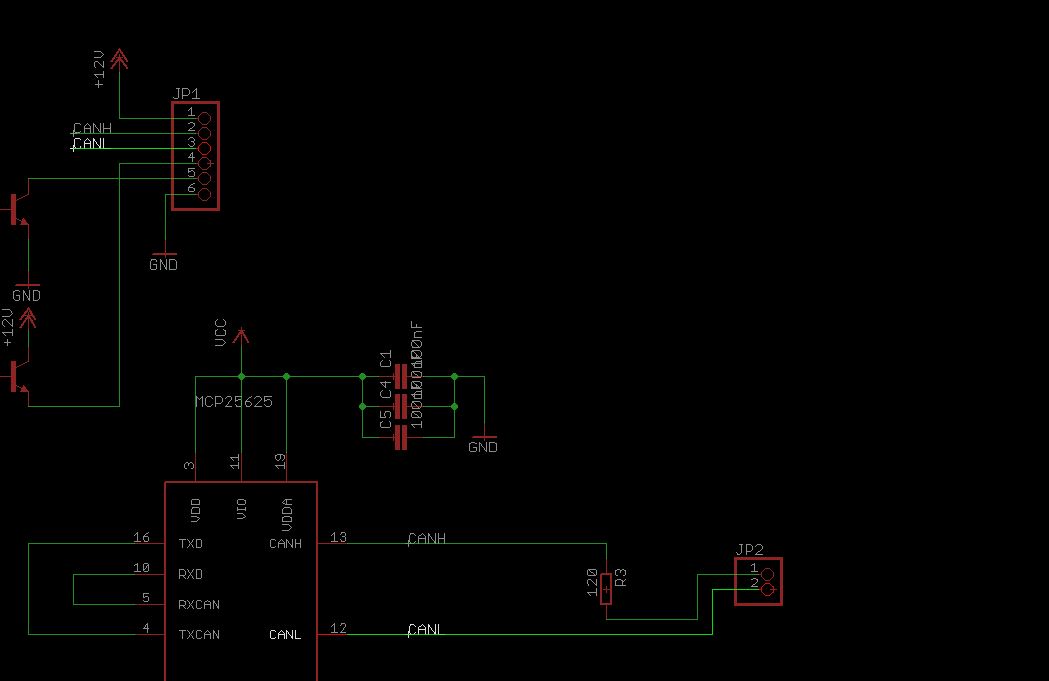
dunno.. schrieb:> Grade noch gesehen, was macht der 120r in canh? Das soll nicht die> Terminierung sein, oder...?
Doch, das ist die Terminierung. CANH und CANL gehen noch an JP2
Bülent C. schrieb:> dunno.. schrieb:>> Grade noch gesehen, was macht der 120r in canh? Das soll nicht die>> Terminierung sein, oder...?>> Doch, das ist die Terminierung. CANH und CANL gehen noch an JP2
Dann schau dir nochmal an, wie man CAN terminiert. die 120r werden nicht
in reihe, sondern zwischen H und L geschalten.
dunno.. schrieb:> Dann schau dir nochmal an, wie man CAN terminiert. die 120r werden nicht> in reihe, sondern zwischen H und L geschalten.
Ist er doch auch! Mit gesetztem JP2 wird R3(120Ohm) parallel zu CANH und
CANL geschaltet.
JP2 ist ein Jumper
In den jeweiligen error Registern sind bits gesetzt. Das konnte ich noch
auslesen.
Der tx hat bit 7 und rx keins bei der ersten Platine.
Rx zeigt einen Überlauf des Empfang Buffers an und tx kein Fehler Bit
bei der zweiten.
Das ist merkwürdig.
Was aber sicher ist, das ich hier mehrere Probleme habe.. Das
offensichtlichste ist, das das Interrupt handling wohl nicht sauber
funktioniert, anders kann ich mir den Überlauf des read Buffers nicht
erklären.
Es wird eine schwierige Geburt...
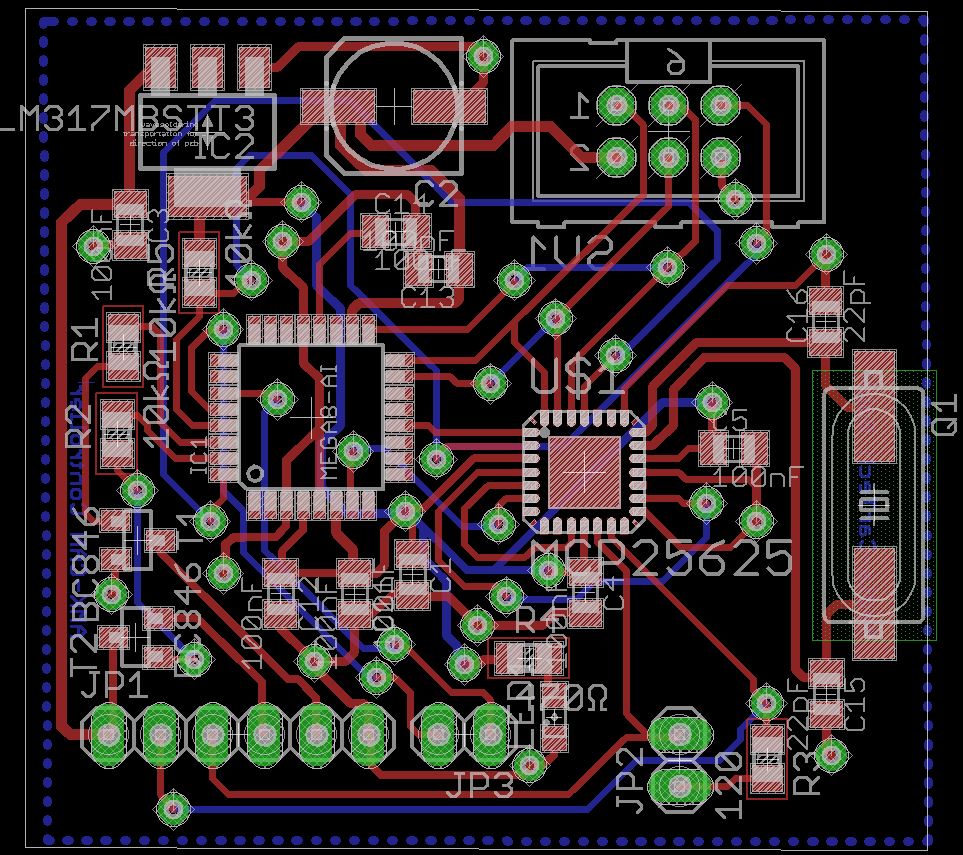
Tut mir leid für die harsche Kritik: Das ganze Platinenlayout ist
ziemlich gruselig. Bauteile (Quartz und zugehörige Kondensatoren sind
nur ein Beispiel) mit kurzen Leitungen an den MC. Leitungen
grundsätzlich so kurz wie möglich und Y-Abzweiger und Kreuzungen
vermeiden. Die Leiterbahnen auf dem Bottom-Layer gehen oft wahllos hin
und her...
Uli schrieb:> Tut mir leid für die harsche Kritik
Dafür tue ich ja das Layout hier ins Forum..
Uli schrieb:> Y-Abzweiger und Kreuzungen> vermeiden.
Sollte ich da lieber 'T' Verbindungen nutzen, wo sich drei Leiterbahnen
treffen?
Leider ließen sich kurze Leiterbahnen nicht vermeiden.
Das mit dem Quarz habe ich schon öfters gehört hier.. Was genau ist
nicht ok?
Ich mache jetzt eh ein neues Layout mit einem SSOP28 anstelle dem 6x6
QFN28 des MCP25626.
- Als Quarz werde ich jetzt mal ein 7x5mm nehmen.
- An den Reset PIN tue ich noch ein 47nF Kerko gegen Masse, oder wären
100nF besser?
Gibt es noch weitere Verbesserugsvorschläge?
in den Atmel Application Notes habe ich schon 10nF und 47nF gesehen. Ich
benutze immer 100nF da ich eigentlich nur solche Kerkos für alle µC's
und IC's nehme.
Thomas O. schrieb:> in den Atmel Application Notes habe ich schon 10nF und 47nF gesehen. Ich> benutze immer 100nF da ich eigentlich nur solche Kerkos für alle µC's> und IC's nehme.
Ok, eigentlich spielt es keine Rolle, ob 10, 47 oder 100nF Kerko, nur
dürfte er nicht zu groß sein..Von den 100nF Kerkos habe ich auch
reichlich da.
Zur Sicherheit werde ich noch eine Diode gegen VCC schalten
(antiparallel), um bei einem Abfall des VCC (abschalten) den Kerko
schneller entladen zu können.
und vor den Kerko zw. VCC und GND kannst du nen kleinen 10µF Elko rein
machen falls deine Stromversorgung über deine Platine nicht so stark
dimensioniert ist
ok, das layout ist nicht ganz optimal und wird optimiert, aber ich denke
nicht, das das der eigentliche Grund ist, warum die CAN Kommunikation
nicht funktioniert. Zumal ja die SPI Kommunikation läuft.
Aber dein CAN Problem beschreibst Du nicht wirklich, oder übersehe ich
etwas?
Hast Du JP2 geschlossen?
Da Du die Register zurücklesen kannst:
Initialisiere den CAN und gehe Buson.
Lies den Status zurück, ob er wirklich Active gegangen ist.
Weise eine Nachricht zum Senden an.
Lass die Interrupte erstmal aus.
Kurz warten, nicht dass Du einem Passive oder Busoff zuvorkommst.
Status relevante Register auslesen.
Ohne Gegenstelle müßte der CAN ständig senden und Error Passive melden.
Was siehst Du?
Bülent C. schrieb:> Das mit dem Quarz habe ich schon öfters gehört hier.. Was genau ist> nicht ok?
Nachdem ich hier den Lothar schon erwähnt hatte:
http://www.lothar-miller.de/s9y/categories/33-Quarz
lothar miller + quartzlayout bringt von google auch nen haufen treffer
hier. ziemlich spannend zu lesen, wenns interessiert. ;)
Steffen Rose schrieb:> Aber dein CAN Problem beschreibst Du nicht wirklich, oder übersehe ich> etwas?
Weiter oben hatte ich die Register Einträge gepostet
>> Hast Du JP2 geschlossen?
Ja
> Da Du die Register zurücklesen kannst:> Initialisiere den CAN und gehe Buson.> Lies den Status zurück, ob er wirklich Active gegangen ist.
done
>> Weise eine Nachricht zum Senden an.
done
> Lass die Interrupte erstmal aus.
Das ist fest verankert in der LIB. Daher habe ich keinen großen Einfluss
darauf.
> Kurz warten, nicht dass Du einem Passive oder Busoff zuvorkommst.> Status relevante Register auslesen.
done
>> Ohne Gegenstelle müßte der CAN ständig senden und Error Passive melden.>> Was siehst Du?
Der tx hat bit 7 und rx keins bei der ersten Platine.
Rx zeigt einen Überlauf des Empfang Buffers an und tx kein Fehler Bit
bei der zweiten.
Für eine bessere Analyse, was auf dem MCP25625 passiert, muss ich ihn
mal direkt und ohne die LIB ansprechen.
dunno.. schrieb:> Bülent C. schrieb:>> Das mit dem Quarz habe ich schon öfters gehört hier.. Was genau ist>> nicht ok?>> Nachdem ich hier den Lothar schon erwähnt hatte:> http://www.lothar-miller.de/s9y/categories/33-Quarz>> lothar miller + quartzlayout bringt von google auch nen haufen treffer> hier. ziemlich spannend zu lesen, wenns interessiert. ;)
Das sieht sehr gut aus. Danke für den Hinweis.
Bülent C. schrieb:> Steffen Rose schrieb:>> Aber dein CAN Problem beschreibst Du nicht wirklich, oder übersehe ich>> etwas?>> Weiter oben hatte ich die Register Einträge gepostet
Das war mir durch die Lappen gegangen, da du nicht direkt die
Registerwerte gepostet hast.
>>>> Hast Du JP2 geschlossen?> Ja>>> Da Du die Register zurücklesen kannst:>> Initialisiere den CAN und gehe Buson.>> Lies den Status zurück, ob er wirklich Active gegangen ist.> done>>>> Weise eine Nachricht zum Senden an.> done>> Lass die Interrupte erstmal aus.> Das ist fest verankert in der LIB. Daher habe ich keinen großen Einfluss> darauf.
Du kannst nicht einmal den globalen Interrupt sperren/gesperrt lassen?
OK, solange dies nicht dein eigentliches Problem ist. Du hattest nur
selbst die Vermutung geäußert.
>> Kurz warten, nicht dass Du einem Passive oder Busoff zuvorkommst.>> Status relevante Register auslesen.> done>>>> Ohne Gegenstelle müßte der CAN ständig senden und Error Passive melden.>>>> Was siehst Du?> Der tx hat bit 7 und rx keins bei der ersten Platine.> Rx zeigt einen Überlauf des Empfang Buffers an und tx kein Fehler Bit> bei der zweiten.
Wieder erwähnst Du nicht die Register oder SPI Kommandos, auf die Du
dich beziehst.
EFLG
CANSTAT
RX und TX sind die Bezeichner für zwei Platinen?
Wenn RX überläuft:
Was meinen die Register:
CANINTE
CANINTF
auf diesem System?
Häufiges Problem: Der Interrupt wird in der CPU häufig per
Flankenwechsel ausgelöst. Mit dieser Einstellung kann man schnell auch
mal einen Interrupt verpassen. In diesem Fall wäre ein Level Interrupt
besser.
Doch das könntest Du auch schnell auf der Platine nachmessen - ob die
Interruptleitung dauerhaft aktiv ist.
Mal was anderes: Was willst Du mit T1 und T2 bezwecken? High Side Switch
und Low Side Switch? Low Side ginge ja noch, High Side (mit dem PNP)
definitiv nicht, der Transistor wird immer durchgeschaltet sein.
fchk
Steffen Rose schrieb:> Wieder erwähnst Du nicht die Register oder SPI Kommandos, auf die Du> dich beziehst.
Wie schon oben geschrieben, ich muss mal auf den MCP25625 direkt per SPI
zugreifen. Das mache ich noch.
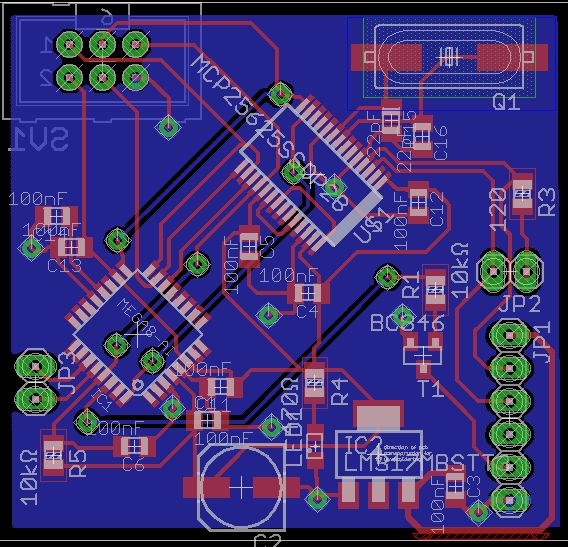
Anbei ein alternativer Schaltungsvorschlag, den ich eben mal so in einer
Stunde gemacht habe. Denke mal darüber nach...
Deine beiden Transistorausgänge habe ich erstmal weggelassen, weil mir
unklar ist, wofür die sind, und außerdem wird das ohnehin nicht so
gehen, wie Du es da im Schaltplan hast.
fchk
Frank K. schrieb:> Anbei ein alternativer Schaltungsvorschlag, den ich eben mal so in einer> Stunde gemacht habe. Denke mal darüber nach...
Ich nutze aber keinen PIC...Aber worüber genau soll ich nachdenken?
Bülent C. schrieb:> Die SPI Kommunikation zwischen dem Atmega168 und dem MCP25625> funktioniert.
Und was funktioniert nicht?
Wie stellst du das fest?
Hast du ein Oszilloskop?
Lothar Miller schrieb:> Und was funktioniert nicht?
Mit CAN1 schicke ich eine Nachricht an CAN2, der empfängt diese,
inkrementiert die ID und schickt sie zurück an CAN1, der wiederum tut
das gleiche....CAN1 kann die Message nicht schicken, bzw CAN2 erhält
diese nicht. Das weiß ich im Moment garnicht.
> Wie stellst du das fest?
Debug ausgabe am LCD bzw. UART. Register der MCP25625 auf den jeweiligen
Platinen kann ich lesen und beschreiben. Daher gehe ich mal davon aus,
das die SPI Kommunikation funktioniert.
> Hast du ein Oszilloskop?
Noch nicht. Aber ein Analyzer ist schon auf dem Weg. Oszi folgt.
Bülent C. schrieb:>> Hast du ein Oszilloskop?> Noch nicht. Aber ein Analyzer ist schon auf dem Weg. Oszi folgt.
Gut. Denn wenn du nicht mal weißt, ob überhaupt was aus die Leitung
rausgeht, bzw. wie das aussieht, ist es wie Stochern in der Suppe: mit
ein wenig Glück findest du einen Brocken Fleisch...
Lothar Miller schrieb:> Gut. Denn wenn du nicht mal weißt, ob überhaupt was aus die Leitung> rausgeht, bzw. wie das aussieht, ist es wie Stochern in der Suppe: mit> ein wenig Glück findest du einen Brocken Fleisch...
Eben..Deswegen habe ich auch in der zwischenzeit das Layout optimiert,
um eventuelle harwarebedingte Fehler auszumerzen. Auch benutze ich kein
6x6 QFN28 mehr, wo ich die Befürchtung habe, das ich es evtl. nicht
richtig verlöten konnte. Die Paste hatte ich zwar sauber auf die
einzelnen Pads angebracht, aber 100%'ig bin ich mir nicht sicher ob da
Kontakt ist.
Bülent C. schrieb:> Frank K. schrieb:>> Anbei ein alternativer Schaltungsvorschlag, den ich eben mal so in einer>> Stunde gemacht habe. Denke mal darüber nach...> Ich nutze aber keinen PIC...
Ich weiß wohl, dass Dein Horizont begrenzt ist.
> Aber worüber genau soll ich nachdenken?
genau darüber. Siehe Teil 1 Deiner Antwort.
Du siehst ja, dass mein Vorschlag einfacher ist, weniger Bauteile
braucht, billiger ist, und obendrein schneller ist, weil kein SPI
dazwischen ist und der ECAN im PIC eine Weiterentwicklung des MCP2515
ist und mehr Buffer und andere kleine Verbeserungen und Bugfixes hat.
Ich kann Dir den Weg zeigen, gehen musst Du ihn selber.
fchk
PS: Es gäbe noch den LPC11C14, bei dem auch der Transceiver intern ist
(zwei Dies in einem Package). Ich habe aber immer gerne den Transceiver
extern, weil das immer das erste ist, was kaputt geht, und ein SO08 ist
einfacher getauscht als ein QFN32 mit Exposed Pad. Außerdem brauchts
manchmal andere Transceiver, zB für SIngle Wire Can, FT CAN, Low Speed
Busse etc.
Frank K. schrieb:> Bülent C. schrieb:>> Frank K. schrieb:>>> Anbei ein alternativer Schaltungsvorschlag, den ich eben mal so in einer>>> Stunde gemacht habe. Denke mal darüber nach...>>> Ich nutze aber keinen PIC...> Ich weiß wohl, dass Dein Horizont begrenzt ist.
Was soll denn dieser Unsinn???? gehts noch?
>>> Aber worüber genau soll ich nachdenken?> genau darüber. Siehe Teil 1 Deiner Antwort.
Siehe meine Antwort oben!
>> Du siehst ja, dass mein Vorschlag einfacher ist, weniger Bauteile> braucht, billiger ist, und obendrein schneller ist, weil kein SPI> dazwischen ist und der ECAN im PIC eine Weiterentwicklung des MCP2515> ist und mehr Buffer und andere kleine Verbeserungen und Bugfixes hat.>
Biller ist es ganz gewiss nicht, eher teurer als die Kombi ATMega168 und
MCP25625..40 Cent sogar!! Ok, SPI ist ein Flaschenhals...aber für die
vorliegende Anforderung reicht es allemal.
> Ich kann Dir den Weg zeigen, gehen musst Du ihn selber.
Danke, aber den von Dir vorgeschlagenen Weg kann ich nicht gehen!
Wie kannst Du denn eigentlich einen Vorschlag machen, wenn Du nicht mal
die Anforderungen kennst?!?!
>> fchk>> PS: Es gäbe noch den LPC11C14, bei dem auch der Transceiver intern ist> (zwei Dies in einem Package). Ich habe aber immer gerne den Transceiver> extern, weil das immer das erste ist, was kaputt geht, und ein SO08 ist> einfacher getauscht als ein QFN32 mit Exposed Pad. Außerdem brauchts> manchmal andere Transceiver, zB für SIngle Wire Can, FT CAN, Low Speed> Busse etc.
Der LPC11C14 nicht, sondern der LPC11C22 und LPC11C24 haben den
Transceiver inne.
Frank K. schrieb:> Du siehst ja, dass mein Vorschlag einfacher ist, weniger Bauteile> braucht, billiger ist, und obendrein schneller ist, weil kein SPI> dazwischen ist und der ECAN im PIC eine Weiterentwicklung des MCP2515> ist und mehr Buffer und andere kleine Verbeserungen und Bugfixes hat.
....oder willst Du hier eine PIC vs. AVR Diskussion anzetteln...so ala :
Beitrag "Re: AVR gegen den Rest der Welt"
Frank K. schrieb:> war ja nur ein Vorschlag
Ja, danke dafür, aber ich habe die Vorgabe so günstig und einfach wie
möglich. Auch wenn es mit einem Pic günstiger wäre müsste ich mich in
pic einarbeiten und das geht aus zeitlichen Gründen nicht.
Steffen Rose schrieb:> Woher weißt Du, ob die SPI Kommunikation funktioniert, wenn Du nicht> einmal die Fehlerregister auslesen kannst?
Wo habe ich denn sowas geschrieben???
Sagtmal, ließt Ihr mal richtig die Beiträge?
Die Lib die ich nutze hat Funktionen, die über SPI die Register auslesen
und den Inhalt zurückgeben. Diese Funktionen haben mir Werte
zurückgegeben, und auch mal keine, wenn ich den CS untebrochen hatte
(hatte mir auch eine Breakout Platine für den MCP25625 gebaut)...ergo
funktioniert die SPI Kommunikation.
Das einizge was ich noch nicht gemacht habe ist, das ich "noch" nicht
selbst direkt auf die Register zugegriffen habe.
Du schriebst, dass die Lib die Zugriffe durchführt und suggerierst mit
deiner Aussage
> Wie schon oben geschrieben, ich muss mal auf den MCP25625 direkt per SPI> zugreifen. Das mache ich noch.
dass es dir bisher nicht möglich ist, aus deiner Applikation heraus auf
die Register zuzugreifen.
Wo also schreibst Du, dass Du weißt, dass die Daten auch richtig vom MCP
interpretiert wurden? Dafür wäre ein Rücklesen notwendig.
Um deine Aussagen als sicher oder unsicher einzustufen, wäre es auch
wichtig zu wissen, wie du zu deiner Erkenntnis gekommen bist.
(z.B. beschreibst du deinen SPI Test erst in deiner letzten Aussage)
> char Buffer[1];> itoa(error,Buffer,10);
Müßte der Buffer nicht 4 Zeichen groß sein? (0..255 und '\0').
Ich wäre mir unsicher, welches Bit im error register nun eigentlich
wirklich gesetzt ist. Und dein Stack dürfte auch durcheinander sein(?).
> In den jeweiligen error Registern sind bits gesetzt. Das konnte ich noch> auslesen.> Der tx hat bit 7 und rx keins bei der ersten Platine.> Rx zeigt einen Überlauf des Empfang Buffers an und tx kein Fehler Bit> bei der zweiten.> Das ist merkwürdig.> error = can_read_error_register().tx
Das EFLG Register gibt es nicht getrennt nach TX und RX.
Insofern erscheint mir deine Interpretation fehlerhaft.
Die SPI Funktionen werde ich jetzt nicht reintun.
Und wenn ich von dieser Funktion einen true bekomme, dann kann ich doch
davon ausgehen, das die SPI Kommunikation funktioniert?!?!
dürfte als SPI Test passen.
Die Reset-Behandlung finde ich etwas unglücklich. Aber wird schon
passen.
Nun sollte aber auch deinerseits Zugriffe der Art:
mcp2515_read_register(EFLG)
möglich sein.
Ich nehme an, dass dieses Passive anzeigt, was bedeutet, dass dein
zweites Board nicht mithört oder der Abschlusswiderstand fehlt. (Ja, du
schriebst, er ist aktiv.)
Senden beide Boards die gleichen Daten? Wenn es genau die gleichen Daten
sind, ist es kein Problem. Wenn Du jedoch die gleiche CAN ID mit
unterschiedlichen Datenbytes nutzt, weil du zum Testen variiert hast,
geht dies schief.
Steffen Rose schrieb:> if (mcp2515_read_register(CNF2) !=> pgm_read_byte(&_mcp2515_cnf[bitrate][1])) {>> dürfte als SPI Test passen.
Eben :-)
>> Die Reset-Behandlung finde ich etwas unglücklich. Aber wird schon> passen.
Sehe ich genauso...
>> Nun sollte aber auch deinerseits Zugriffe der Art:> mcp2515_read_register(EFLG)> möglich sein.
Ja, sollten Sie. Aber ich will die LIB komplett weglassen und mit
eigenen Funktionen per SPI die Register auslesen...Das mache ich mit den
neuen Platinen(Habe ja das Platinen Layout ein wenig optimiert) Wenn ich
Morgen wieder zuhause bin, dann ist der Logikanalyzer auch schon
bestimmt da, und ich kann besser analysieren. nur so ist es derzeit nur
ein rumgestochere.
>> Ich nehme an, dass dieses Passive anzeigt, was bedeutet, dass dein> zweites Board nicht mithört oder der Abschlusswiderstand fehlt. (Ja, du> schriebst, er ist aktiv.)>> Senden beide Boards die gleichen Daten? Wenn es genau die gleichen Daten> sind, ist es kein Problem. Wenn Du jedoch die gleiche CAN ID mit> unterschiedlichen Datenbytes nutzt, weil du zum Testen variiert hast,> geht dies schief.
Mit CAN1 schicke ich eine Nachricht an CAN2, der empfängt diese,
inkrementiert die ID und schickt sie zurück an CAN1, der wiederum tut
das gleiche....CAN1 kann die Message nicht schicken, bzw CAN2 erhält
diese nicht. Das weiß ich im Moment garnicht, und darin liegt mein
Problem. CAN2 zeigt mir einen überlauf des Buffers an...Ich tippe hier
darauf, das der Interrupt nicht ausgelöst wird... Wie gesagt, ich
stochere gerade nur rum...Wenn der Analyser da ist, dann weiß ich mehr
Ich gehe davon aus, dass CAN1 und CAN2 zwei deiner Boards sind und dass
Du entsprechend deiner Aussage das Programm modifiziert hast.
Desweiteren zur Erinnerung:
can_read_error_register().rx
ist der Error counter, nicht das EFLG. Den Buffer Overflow würdest Du
aber im EFLG sehen. Diese Erkenntnis ist falsch, wenn du die angegebene
Funktion genutzt hast.
Steffen Rose schrieb:> Desweiteren zur Erinnerung:> can_read_error_register().rx> ist der Error counter, nicht das EFLG. Den Buffer Overflow würdest Du> aber im EFLG sehen. Diese Erkenntnis ist falsch, wenn du die angegebene> Funktion genutzt hast.
Stimmt! Ich hatte zwischendurch aber auch mal das EFLG gelesen.. Wie
gesagt, anscheinend habe ich mich unglücklich ausgedrückt.
Danke für Deine Hilfe.
Wenn ich die neue Platine geätzt, gebohrt, durchnietet und bestückt
habe, werde ich nochmal testen und hier die Ergebnise berichten.
So, nach langer Zeit konnte ich mich wieder an diese Platine setzen.
Folgende Angaben kann ich nun machen.
Im EFLG Fehlerregister ist kein bit gesetzt, alle stehen auf 0 (Auf
beiden Boards)
Was mir aber merkwürdig vorkommt, ist das auf dem CANL Aktivität
vorhanden ist, aber auf CANH nicht (steht permanent auf 1.
CAN-L sieht mir aber auch nicht so ganz richtig aus.
Miß erstmal nur ein Board statisch durch.
CAN-TX sollte auf High stehen (rezessiv).
Damit dann CAN-H und CAN-L rezessive sein.
Daraus folgt dann, dass an CAN-RX auch ein High anliegt.
Um den Transceiver zu testen lege ich als nächstes von außen per CAN
Analyzer ein Signal an und prüfe CAN-RX.
(So kann mir keiner Einreden, meine Software hätte einen Fehler.)
Das ist doch zum Mäusemelken mit dem MCP25625, so langsam aber sicher
fliegen die Platinen gleich aus dem Fenster.
Habe nochmal folgende Sachen überprüft:
- SPI funktioniert
- INT funktioniert
- Der MCP25625 ist sauber beschaltet. TX geht auch an TXCan und RX an
RXCan
- Der Quarz schwingt
- Der Abschlußwiderstand ist auch richtig beschaltet
- VDD, VIO und VDDA werden sauber mit 5V versorgt (Abblockkerkos sind
dran)
- Beide Platinen haben den selben Masse Bezugspunkt
- CANL an CANL, und CANH an CANH angeschloßen
- Im Fehlerregister sind keine Fehler vermerkt
- Reset ist mit einem PULL-UP hochgezogen
Ich bin mir ziemlich sicher, das ich etwas ziemlich offensichtliches
übersehe.
Besorge Dir einen definitiv funktionierenden CAN-Knoten. Besser ist das.
Ich habe mir für mein erstes CAN-Projekt das hier besorgt:
http://www.peak-system.com/PCAN-USB.199.0.html
Das sind zwar auch Kosten, aber Du musst zwischen Arbeitszeit und
Entwicklungskosten abwägen, und in einer 4ma kostet Deine Arbeitszeit
auch Geld.
fchk
Hallo Zusammen,
Hast du die Lösung gefunden, bekomme ich auch das gleiche Problem.
Ich ersetze MCP2515 durch MCP25625, aber es gibt einen Fehler
vielen Dank.
mfg,
Ali Imran Siddiqui
{kind=link}