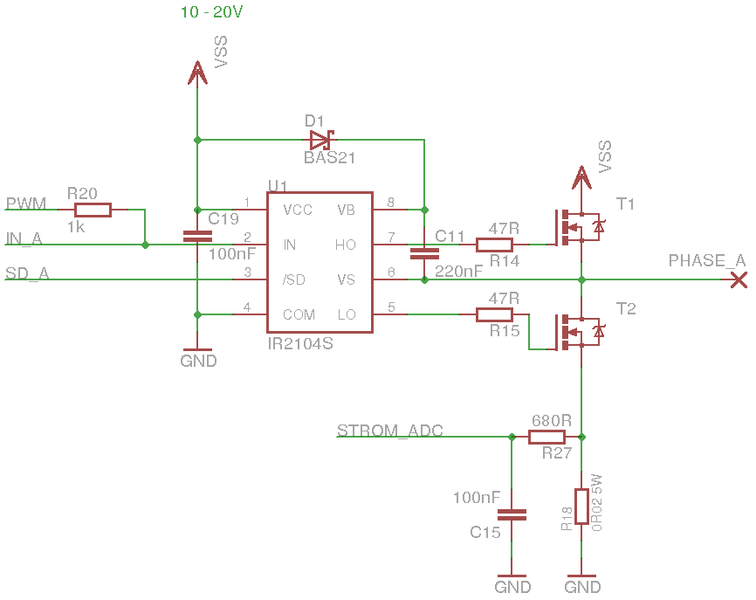
Guten Abend zusammen. Ich beschäftige mich momentan mit der Entwicklung einer Regelung für einen BLDC-Motor. Motordaten: - Nennspannung 24V - Lehrlaufdrehzahl 20500 - Lehrlaufstrom 74.1mA - Anlaufstrom 10.5A - Hallsensor Für den Leistungsteil hab ich mich ganz für die Vorgabe aus dem Artikel auf dieser Seite entschieden. Siehe Anhang. Als MOSFET habe ich mir den IRFP064 N-KAnal ausgesucht und als Treiber den IR2101 oder IR2104 wobei mir nicht ganz klar ist was der Unterschied ist. Falls mich jemand Aufklären kann wäre ich Dankbar. Passt meine Auswahl so zu meinem BLDC-Motor?
Angehängte Dateien:
Der Unterschied liegt in der Zeit die er zum An, bzw ausschalten Braucht (Siehe unter Product Summary bei T on/off)
ach und ich vermute mal das sollte in richtung mosfets bezogen hinhauen
Hallo und danke für deine Antwort. Warum steht bei dem einen "High & Low-Side Driver" und bei dem anderen "Half Bridge Driver" gbts da ausser der Zeit keinen Unterschied? Und was ist der Unterschied zum "Self Oscillating Half Bridge Driver"?
Ich glaub ich hab es selber raus gefunden. Der "Half Bridge Driver" hat die "Cross-conduction prevention logic" die verhindert das die High und Low-Seite gemeinsam geschalten werden. Korrekt?
Gabriel E. schrieb: > Warum steht bei dem einen "High & Low-Side Driver" und bei dem anderen > "Half Bridge Driver" gbts da ausser der Zeit keinen Unterschied? Beim IR2101 (High und Lowside) kannst du die beiden FETs unabhängig über zwei Eingängen ansteuern, beim IR2104 (Half-Bridge) hingegen hast du nur einen Eingang für beide zusammen und halt SD. Zusätzlich hat der IR2104 eine fest vorgegebene Deadtime während du sie beim IR2101 über die Eingangssignale selbst bestimmen kannst. > Und was > ist der Unterschied zum "Self Oscillating Half Bridge Driver"? Der Self Oscillating Half Bridge Driver z.B. IR2153 hat noch einen Oszillator eingebaut.
Gabriel E. schrieb: > Als MOSFET habe ich mir den IRFP064 N-KAnal ausgesucht Beachte dabei bitte, das der IRFP064 deutlich mehr Gate Charge und Gatekapazität hat, als der IRLR7843, der im Artikel verwendet wird, was bedeutet, das du die Gatewiderstände kleiner ansetzen solltest. Während der IRLR7843 eine gesamte Gateladung von 50nC (gehen wir mal von den max. Werten aus) hat, sind das beim IRFP064 190nC, die geladen werden müssen - und zwar zügig. Es wird also nötig sein die Gatewiderstände kleiner zu wählen, grob etwa um den Faktor 4 (das hängt aber auch von der PWM Frequenz usw. ab, also nicht auf die Goldwaage legen). Dabei ist zu beachten, das der max. Treiberstrom des IR2104 nicht überschritten wird, andererseits aber der Tiefpass von Gatekapazität und Widerstand nicht zu langsam wird.
>756px-BLDC_Leistungsteil_1.png Was für Signale werden an IN_A und PWM (verbunden durch einen R) eingespeist? > - Lehrlauf... Was ist das?
Angehängte Dateien:
-

Lehrlauf.png
12 KB
Fritz schrieb: > Matthias Lipinsky schrieb: >>> - Lehrlauf... >> >> Was ist das? > Google kaputt? offensichtlich. Denn selbst Google kennt das Wort nicht.
Das scheint nur bei dir so zu sein, ich habe „Ungefähr 26.200 Ergebnisse (0,33 Sekunden)“.
Och Leute danke für die Antworten aber über einen Schreibfehler zu Diskutieren geht am Thema vorbei. Lehr = Leer Danke
Angehängte Dateien:
-

3.PNG
14 KB
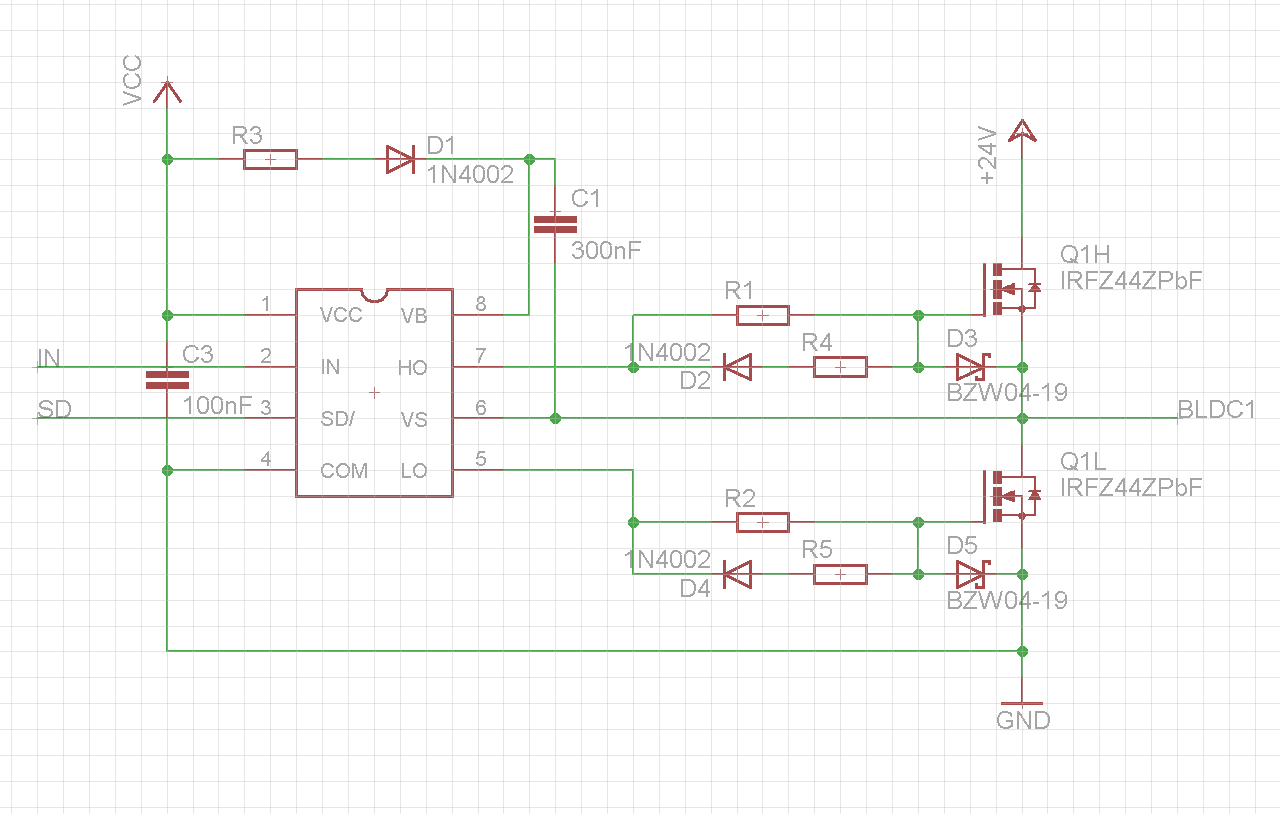
Ich habe mich noch ein bisschen in das Thema eingelesen und einen zweiten Versuch erstellt. Könntet ihr euch das nochmal anschauen und mir sagen ob was falsch ist? Zur MOSFET-Auslegung: Ich bin nach folgenden Schritten vorgegangen. 1.N- oder P-Kanal MOSFET. 2.Nennspannung bestimmen. 3.Nennstrom bestimmen. 4.Leitungsverluste berechnet. 5.Thermischen Anforderungen berechnen. Der Motor benötigt 24V bei 10,5A(Anlaufstrom) 1,5(Dauerstrom). Ich hab mich für einen N-Kanal MOSFET von IRF entschieden. Der IRFZ44ZPbF hat laut Datenblatt Vdss=55V, Id=51A und Rds=13,9mOhm. Id hab ich nach dem Anlaufstrom von 10,5A ausgesucht, den Leistungsverlust berechne ich mit dem Dauerstrom von 1,5A und komme mit P=Rds*Id² auf 0,031W. Pd hat der MOSFET laut Datenblatt 80W also sollte er das locker vertragen? Leider finde ich im Datenblatt kein Rth und bin deshalb bei den Thermischen Anforderungen gescheitert. Stimmt ihr mir bei meiner Auswahl zu? Zur Treiber-Auslegung: Da hängt es ein bisschen bei mir und ich komm auch nicht mit dem Internet weiter. Ich weis nicht ob der IR2104 genug Leistung hat um die MOSFETs anzusteuern und bei der Auslegung der Widerstände hängt es bei mir auch. Kann mir einer von euch das Schritt für Schritt erklären? Bitte nicht auf diese Seite verweisen da mir das nicht viel weiter geholfen hat. http://www.mikrocontroller.net/articles/Treiber Danke für eure Antworten!
Moin, sorry das ich den Thread wieder etwas ausgrabe, aber hier sind viele Fragen noch nicht geklärt. > Id hab ich nach dem Anlaufstrom von 10,5A ausgesucht, den > Leistungsverlust berechne ich mit dem Dauerstrom von 1,5A und komme mit > P=Rds*Id² auf 0,031W. > Pd hat der MOSFET laut Datenblatt 80W also sollte er das locker > vertragen? Ja, ABER die Hauptverluste entstehen beim Schalten, denn hierbei ist der Widerstand in einem kurzen Zeitbereich ein vielfaches, abhängig von der Gatespannung höher. Der Verlust ist also auch entscheidend abhängig von der PWM Frequenz und dem gewählten Gatewiderstand. Nachlesen kannst du das da: https://www.mikrocontroller.net/articles/FET#Verlustleistung > Leider finde ich im Datenblatt kein Rth und bin deshalb bei den > Thermischen Anforderungen gescheitert. Das Ding steckt in einem TO220AB Gehäuse. Laut englischem Wikipedia gilt da 70 °C/W Erwärmung. Solltest du also unter 1 Watt bleiben, wirst du sogar ohne Kühlkörper auskommen. > Zur Treiber-Auslegung: > Da hängt es ein bisschen bei mir und ich komm auch nicht mit dem > Internet weiter. > Ich weis nicht ob der IR2104 genug Leistung hat um die MOSFETs > anzusteuern und bei der Auslegung der Widerstände hängt es bei mir auch. > Kann mir einer von euch das Schritt für Schritt erklären? Dazu gibt es ein Dokument von Fairchild, das sich AN-6076 Design und Application Guide of Bootstrap Circuit for High-Voltage Gate-Driver IC nennt. Die Suchmaschine deines Vertrauens wird das sicher schnell finden. Da gibt es auf Seite 8 Kapitel 6 eine Anleitung. Nun der Grund warum ich diesen Thread überhaupt wieder aufwärme: Ich versuche auch seit einem halben Jahr die Schaltung nachzubauen, allerdings mit Sensoren. Das einzige was die Schaltung bei mir allerdings tut, ist, sobald ich eine Induktive Last verwende (mit Widerständen ist alles gut), entweder Treiber und/oder Mikrocontroller zu Grillen. Bei dir hab ich nun das erste mal D3 und D5 entdekt. Was machen die Zenner Dioden da bzw. wo hast du die Idee her ?
Martin W. schrieb: > Bei dir hab ich nun das erste mal D3 und D5 entdekt. Was > machen die Zenner Dioden da bzw. wo hast du die Idee her ? Das sind Transientenkappdioden, aber so rum, wie die da eingezeichnet sind, klappt es nicht. Die sollen etwaige Peaks ab etwa 20V fernhalten, sind aber m.E. überflüssig. Ich betreibe jedenfalls 4kW Motoren ohne diese Dioden und ohne Probleme. Entscheidend ist der richtige Aufbau mit kräftigen Motorleitungen und guter Entkopplung des Digitalteiles. R4 ist nicht sinnvoll und sollte weggelassen werden. Auch eine 1N4002 ist nicht gut, besser eine BA157 o.ä. schnelle Diode. Gatewiderstände im Bereich von 10-22 Ohm, kann man über Gatekapazität, Flankensteilheit und max. Treiberstrom errechnen. Es schadet auch nicht, C1 grösser zu machen, das können auch schon mal 10µF/50V oder so sein. Wichtig ist bei Bausteinen mit fest eingestellter Totzeit, das das alles mit den MOSFet Ein- und Ausschaltzeiten passt. Die MOSFet müssen also deutlich schneller sein als die Totzeiten des IR2104.
Yepp, die Zener sind falsch drin... falls die Schaltung tatsächlich so aufgebaut wurde haben die MOSFET nie geleitet, der High-Pegel wurde vom Treiber über R1 gestemmt, R2 hat es zerrissen und der Low-Pegel ging nur über die Substratdiode des unteren MOSFET. Kein Wunder wenn das kaputt geht. Matthias S. schrieb: > Wichtig ist bei Bausteinen mit fest eingestellter Totzeit, das das alles > mit den MOSFet Ein- und Ausschaltzeiten passt. Dafür vermutlich das Gebilde mit Diode/Widerstand am Gate, um die Cross-Conduction zu vermeiden. Schnell ausschalten, langsamer einschalten.
> Entscheidend ist der richtige Aufbau mit kräftigen Motorleitungen und > guter Entkopplung des Digitalteiles. Könntest du das bitte etwas genauer erklären. Das klingt ein bisschen so, als könnte mir das weiter helfen.
Martin W. schrieb: > Könntest du das bitte etwas genauer erklären. Hmm, dafür müsste man wissen, um was für Ströme es geht. Wenn du da nur ein kleines Niedervolt Motörchen mit 12V und 2A betreiben wolltest, reicht es vermutlich, auf der Endstufenplatine dicke Kupferbahnen vorzusehen und dafür zu sorgen, das der Motorstrom nicht über die ganze Platine läuft und direkt an die MOSFets geht. Kein Motorstrom sollte es zu den oder über die Treiberbausteine schaffen. Bei mehr als 10-20A ist vermutlich eine Konstruktion aus Kupferschienen oder dickeren verzinnten Leiterbahnen das mindeste. Auch hier gilt es umso mehr, kurze Wege für den Strom zu finden und die Motorversorgung gut zu entkoppeln und abzublocken. Die meisten prof. Controller, die was taugen, besitzen eine ganze Batterie von Elkos, um die Versorgung zu bügeln und oft sogar DC/DC Wandler, um Treiber und Logik zu versorgen und Motorspitzen von diesen fernzuhalten. Oft sind Endstufe und Steuerung auch auf verschiedenen Boards (Curtis-DC, e-Max BLDC als Beispiel) Anständige Verdrosselung, evtl. mit PI-Filtern (CLC Kombi), hilft dabei. Weiterhin musst du dir natürlich mit der Ansteuerung sicher sein. D.h., die Totzeit muss gross genug sein - die Endstufe darf bei full throttle und ohne Verbraucher keinen Strom ziehen, das würde auf Shoot-Through hindeuten. Dabei drehst du den Motor langsam und checkst alle Hallsektoren. Ich verlasse mich nicht auf solche Treiber, sondern benutze z.B. den IR2110, bei dem ich mittels des MC die Totzeit einhalte, die ich gewählt habe. (Vergl. Projekt https://www.mikrocontroller.net/articles/3-Phasen_Frequenzumrichter_mit_AVR). Tcf K. schrieb: > Dafür vermutlich das Gebilde mit Diode/Widerstand am Gate, um die > Cross-Conduction zu vermeiden. Schnell ausschalten, langsamer > einschalten. Auch bei solchen Konstrukten muss man dann darauf achten, die max. Treiberströme nicht zu überschreiten. Wenn man also das Gate mit einer Diode schnell entladen will, muss sowohl Diode als auch der Sink des Treibers die Ströme vertragen können. Der kleine IR2104 ist da wirklich kein Stromwunder mit 130/270mA und für schnelle PWM nur bedingt geeignet. Als Beispiel: Ich kontrolliere H-Brücken mit je 3 MOSFets (IRFB3207)in der High- und in der Lowside mit einem IR2110, der +/- 2A Treiberstrom liefert. Die Gatewiderstände liegen bei 12/15 Ohm und das klappt ganz gut. Die Gateversorgung (Vcc des Treibers) muss in der Lage sein, die benötigten Ströme zu liefern und darf dabei nicht einbrechen.
Angehängte Dateien:
-

treiber.png
44 KB -

diskreterTreiber.png
24 KB
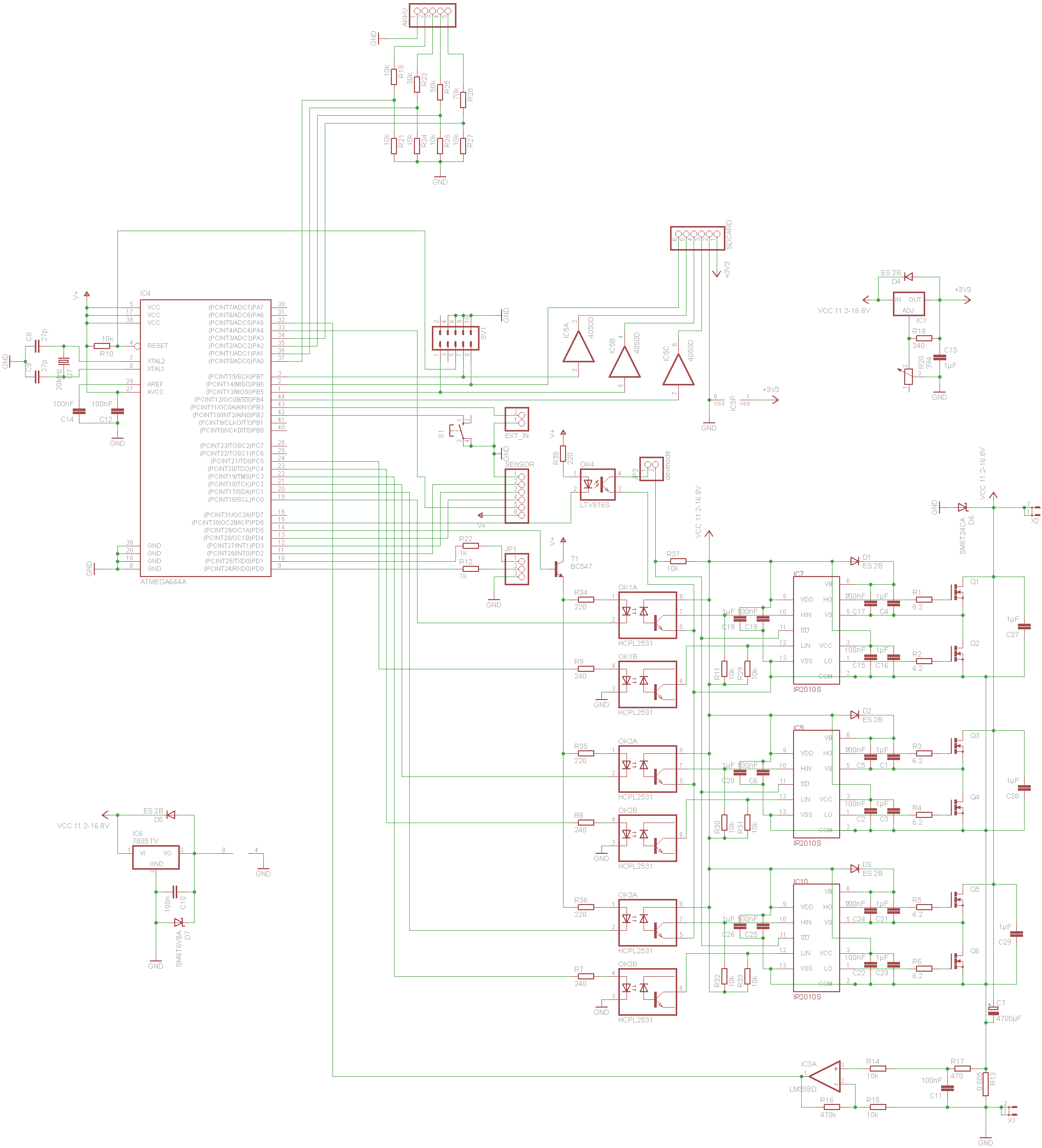
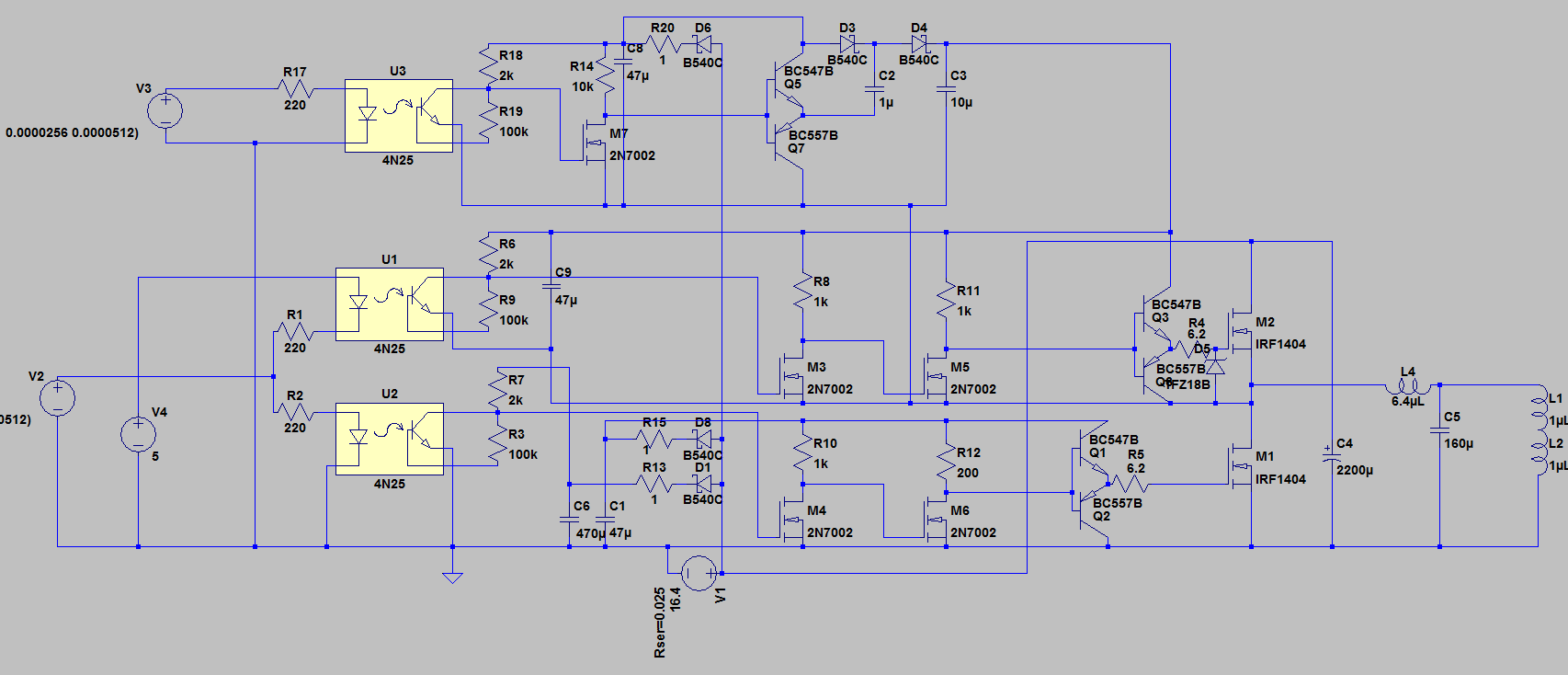
> Hmm, dafür müsste man wissen, um was für Ströme es geht.[...] Geplant ist ein etwa 250W Motor bei 7.2 Volt, den ich aber mit 11.2 bis 16.8 V (S4 LiPo) fahren will. Der Motor wird dabei nie länger als 100ms am Stück laufen, und muss in dieser Zeit beschleunigt und abgebremst werden. Statt Leiterplatte hatte ich 1mm² Kupferlackdraht benutzt um die Mosfets Anzuschließen. Die Motorphasen hab ich mit einer Verschraubung direkt aus dem TO220 Gehäuse entnommen. > Die meisten prof. Controller, die was > taugen, besitzen eine ganze Batterie von Elkos, um die Versorgung zu > bügeln und oft sogar DC/DC Wandler, um Treiber und Logik zu versorgen > und Motorspitzen von diesen fernzuhalten. Oft sind Endstufe und > Steuerung auch auf verschiedenen Boards (Curtis-DC, e-Max BLDC als > Beispiel) DC/DC Wandler kommen aus Platz- und Kostengründen leider nicht in Frage. Dafür hab ich nun Optoko. in die Schaltpläne eingefügt. > Anständige Verdrosselung, evtl. mit PI-Filtern (CLC Kombi), hilft dabei. Dafür hab ich mir zu den 3 Phasen eine Kombo aus 6.4µH und 160µF Tiefpass überlegt.(Ich hoffe so eine Spule ist halbwegs machbar - Tipps hierfür sind sehr erwünscht!). Der würde auch gleichzeitig bewirken, dass die Spannung für den Motor schön tief bleibt (bei entsprechend kleinen PWM on). > Weiterhin musst du dir natürlich mit der Ansteuerung sicher sein. D.h., > die Totzeit muss gross genug sein - die Endstufe darf bei full throttle > und ohne Verbraucher keinen Strom ziehen, das würde auf Shoot-Through > hindeuten. Dabei drehst du den Motor langsam und checkst alle > Hallsektoren. Hier hab ich inzwischen herausgefunden, das mein bisher verwendeter Treiber(irf2104) zu lahm ist. In den 500ns Totzeit kann er einfach die Gates nicht ordentlich entladen. Als ich den Angstwiederstand soweit verkleinert hatte, dass der Shoot-Through weg war, hat es die Treiberbausteine dahingerafft. Also muss ein anderer Treiber her. Ich hab nun allerdings mit den Treibern so meine Probleme. Das liegt daran, dass der von dir vorgeschlagene nicht zwischen Hi und Lo toggelt. Dadurch würde die Diode des Lo-Side Mosfets stark belastet werden. Nachdem ich nun einen Artikel zur Sinnhaftigkeit von Treibern gelesen hab, hab ich versucht soetwas diskret aufzubauen [bzw. zu simulieren]. Die Simulation für LT-Spice ist im Anhang. Wär schön wenn ihr euch beide Varianten mal anschaut und euren Senf dazu gebt! Vorallem wie ich mit der Treibervariante das Freilaufproblem lösen könnte wär für mich spannend. diskrete Variante: -V2 bildet das PWM Signal vom Atmel -V4 ist die Normale Logische Spannungsversorgung -V1 soll die Baterie darstellen. -V3 ist eine 50% PWM vom Atmel für die Ladungspumpe -L4 und C5 Bilden den Ausgangsfilter -L1 und L2 sollen den Motor simulieren. Werte sind geraten! -die Optos werden mit einer Gatevorspannung betrieben um die Geschwindigkeit zu erhöhen. Funktioniert das wirklich ? Gibt es eine Möglichkeit die Optos unempfindlicher zu machen? Jede Spannungsschwankung ist immoment gefährlich für die saubere Übertragung.(Ich muss den Pegel weiter Richtung 0V bekommen! Die Amplitude muss aber möglichst groß bleiben.) -kann ich die Bipolaren Transitoren benutzen, oder sollte ich lieber die im Artikel(http://www.elektronikpraxis.vogel.de/design-tipps/power/articles/373863/) vorgschlagenen FMMT618/718 nutzen. - muss ich die Ladungspumpe für jede Phase einzeln bauen? - kann es tatsächlich funktionieren wie in der simulierten Schlatung, das die Deadtime in Hardware funktioniert, oder sind das nur Simulationsfehler und viel Glück, dass es so immoment ohne Shout-Throu hinhaut?
Martin W. schrieb: > Statt Leiterplatte hatte ich 1mm² Kupferlackdraht benutzt Man rechnet in z.B. der KfZ Technik mit einer Strombelastung von etwa 6A pro mm², das ist also sehr, sehr dünn, was du da benutzen willst. Der Kupferlackdraht(?) wird sich zwar während der 100ms nicht spürbar erwärmen, dem Strom aber schon einigen Widerstand entgegensetzen. > Hier hab ich inzwischen herausgefunden, das mein bisher verwendeter > Treiber(irf2104) zu lahm ist. In den 500ns Totzeit kann er einfach die > Gates nicht ordentlich entladen. Hatte ich ja schon vermutet - der kleine Kerl ist für solch eine schnelle PWM nur geeignet, wenn du MOSFet mit sehr kleiner Gatecharge benutzt. Martin W. schrieb: > diskreterTreiber.png Boh, das ist doch viel zu kompliziert. Nimm einen integrierten Treiber mit ausreichend Strom, und deine Sorgen lösen sich auf. Also z.B. den IR2110 o.ä. Du musst zwar die Software ein wenig umschreiben, um HI und LO zu liefern, das kostet ein wenig Zeit, hat aber den Vorteil, das du die Totzeit leicht per Software einstellen kannst. > - muss ich die Ladungspumpe für jede Phase einzeln bauen? Wenn du es so machen willst - ja. Denn der Bezug für die Highside ist ja der Brückenausgang (die Source der Highside) und die liegt nun mal für jede Halbbrücke auf anderem Potenzial. > - kann es tatsächlich funktionieren wie in der simulierten Schlatung Simulation und Wirklichkeit passen nicht immer zusammen. Wenn du in der Realität dann etwas andere Zeiten hast, musst du rumlöten. > -die Optos werden mit einer Gatevorspannung betrieben um die > Geschwindigkeit zu erhöhen. Funktioniert das wirklich ? Das funktioniert innerhalb enger Grenzen. Aber du kannst auch richtige Optokoppler nehmen, die von vorneherein schnell genug sind, dann musst du den Aufwand nicht treiben. HCPL3180 sind mein Favorit, aber ein 6N137 sollte es auch tun. Die HCPL3180 liefern übrigens selber schon genügend Strom, um Gates anzusteuern. Dann bräuchtest du nur noch DC/DC Wandler für jede Highside. Aber in deinem Fall ist der Verzicht auf OK und der Einsatz von IR2110 wirklich ausreichend. Lies dir nochmal Application Note AVR441 und AVR447 durch, da werden viele Grundlagen und die Software besprochen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.