Nach ausführlichen Versuchen hat sich gezeigt, dass die Frameworks von
Atmel wie ASF oder AtmelSTART schwer zu bedienen sind oder gewisse
Funktonen nicht bereitstellen.
Als beste Methode hat sich für mich die BareBone Programmierung
herausgestellt. Dank Jörg Wunsch ist es endlich gelungen, einen
Microsekunden Systemtimer aufzusetzen:
Beitrag "Re: SAMD20 timer counter 1 läuft nicht"
Das setup nutzt nur die Registerdefinitionsdateien des Prozessors:
"pm.h" defines für das Powermanagment
"tc.h" defines für den Timer
in "ASF\sam0\utils\cmsis\samd20\include\component\"
Ich würde diesen Thread gerne nutzen, um das BareBone Programming ein
wenig auszubauen.
Als nächste möchte ich versuchen, die pins der IO-Ports des SAMD zu
konfigurieren und anzusprechen.
Weiß jemand wie das geht?
Hinter "sam.h" sind die definition von PORT und PORT_PA14 versteckt:
1. in der MCU spezifischen Datei "samd20e17.h" findet sich die
Speicheraddres "PORT"
2. in "port.h" befindet sich das Richtungsregister
Ja, wer kennt und liebt sie noch nicht, die Wiring Funkttionen? ;-)
Hier gibt es die sehr lesenswerte Geschichte zu Wiring:
http://arduinohistory.github.io/
Ich bin in letzter Zeit leider nicht mehr groß dazu gekommen, an
meinem SAMD20-Setup weiter zu spielen.
Hier noch ein paar Schnipsel.
XOSC 16 MHz aktivieren:
>Ich bin in letzter Zeit leider nicht mehr groß dazu gekommen, an>meinem SAMD20-Setup weiter zu spielen.
Wie schade. Aber danke für die Code-Schnipsel.
Interessant wäre eine rudimentäre UART-Setup für "putchar und gechar"
ohne Interrupt und Buffer.
Im Moment untersuche ich gerade die maximale Toggle-Geschwindigkeit.
Ich verwende folgenden Code, bei dem das Port-Toggle-Bit direkt
geschrieben wird:
1
#include"sam.h"
2
3
intmain(void)
4
{
5
SystemInit();
6
7
PORT->Group[0].DIRSET.reg=PORT_PA15;
8
9
while(1)
10
{
11
PORT->Group[0].OUTTGL.reg=PORT_PA15;
12
}
13
}
Der Assemblercode der while-Loop sieht so aus:
1
000001D4strr3,[r2,#28]%2cycles
2
000001D6b#-6%3cycles
Insgesammt sollten für das togglen 5 Zyklen verbraucht werden. Das
entspricht bei 1Mhz Default-Clk 5us.
Mit dem Oszi messe ich aber
6.04us
Da geht wohl irgendwo ein Takt verloren und wenn mein Oszi stimmt, liegt
der interne Oszillator wohl fast 1% daneben.
I
Ich habe das Setup von Rudolf
Beitrag "Re: Erste Schritte mit ARM SAMD20"
etwas refakturiert. Damit sollte der Sysclk bei 48 MHz liegen.
Als Pulslänge messe ich mit dem Oszi 126.8ns was eine ToogleFrequenz von
ca. 4Mhz ergibt.
Was mir am Oszi auffällt: Die Periodendauer schwankt stark, so dass das
Signal in X-Richtung stark verschmiert.
Ich vermute, dass die PLL mit dieser Einstellung ziemlich instabil
läuft.
chris_ schrieb:> Damit sollte der Sysclk bei 48 MHz liegen.> Als Pulslänge messe ich mit dem Oszi 126.8ns was eine ToogleFrequenz von> ca. 4Mhz ergibt.
Durch die wait states wird das langsamer. Eigentlich lohnt sich
so ein schneller CPU-Takt nur, wenn man zumindest Teile des
Programms aus dem RAM abarbeitet.
> Was mir am Oszi auffällt: Die Periodendauer schwankt stark, so dass das> Signal in X-Richtung stark verschmiert. Ich vermute, dass die PLL mit> dieser Einstellung ziemlich instabil läuft.
Das ist ja keine PLL, sondern eine FLL, und die jittert in der Tat
ein bissel herum.
Der SAMD21 als Nachfolger hat auch 'ne PLL.
Die Uart stellt sich als ziemlich harte Nuss dar. Ich habe den Code für
das senden mittels TX für einen SAMD21 zusammengebaut.
Leider geht es nicht richtig:
1. Das TX-Register wird beschrieben
2. es geht eine Weile bis das TX-Register wieder leer ist
3. Es kommt keine Signal am TX-Ausgang ( PB22 ) heraus.
Woran könnte das liegen?
Mittlerweile habe ich den Fehler eingekreist. Er liegt hier:
1
voidUart_begin(unsignedlongbaudrate)
2
{
3
// set port directions
4
PORT->Group[1].DIRSET.reg=PORT_PB22;// TX as output
5
PORT->Group[1].DIRCLR.reg=PORT_PB23;// RX as input
Hier werden die beiden die Pins Tx und Rx als Output und Input
definiert.
Das ist aber falsch. Man muss statt dessen den I/O Multiplexer so
konfigurieren, dass die UART-Peripherie an die Pins angeschlossen wird.
Das ist allerdings einigermaßen kompliziert, weil es im Multiplexer auch
wieder haufenweise Einstellungen gibt und ich noch nicht heraus gefunden
habe, wie die Zuordnung ist.
chris_ schrieb:> Man muss statt dessen den I/O Multiplexer so konfigurieren, dass die> UART-Peripherie an die Pins angeschlossen wird.
Yep.
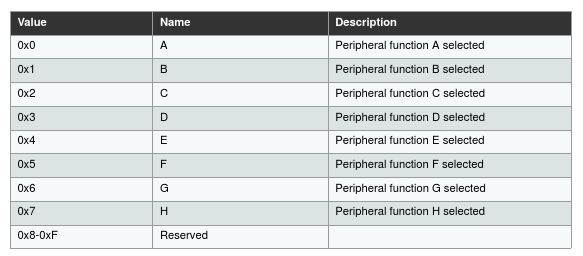
SERCOM5 pad 2 und 3 sind PB22/23, die du nehmen willst, und zwar auf
Funktion D.
Das müsste es sein. Ist ein bisschen verwirrend, weil man zwischen
den "even" und "odd"-Subregistern unterscheiden muss (oder über das
Gesamtregister gehen statt die Bits).
Du musst in der SERCOM auch noch die Pinzuordnung passend setzen,
damit auch wirklich Pad 2 und 3 benutzt werden. Das passiert im
CTRLA.
[Edit: bei PORT_PMUX_PMUXO_D_Val hatte ich mich vertan]
Hallo Jörg,
danke für die Hilfestellung. Ich habe es inzwischen auch so geschafft,
siehe Anhang.
Da meine Version etwas aus den Arduino-Sourcen zusammengeschustertes
ist, sieht es nicht besonders übersichtlich aus. Da ist der Code von Dir
viel besser.
Ja, das Datenblatt finde ich in der Hinsicht nicht wirklich veständlich.
Aus den Arduino-Sourcen geht diese Zeile hervor
#define PIO_SERCOM_ALT 3
..
PORT->Group[PORTGROUP_PORTB].PMUX[PORTB_TX_PIN>>1].reg = temp |
PORT_PMUX_PMUXE( PIO_SERCOM_ALT );
Wobei mir beim besten Willen nicht klar ist, warum PIO_SERCOM_ALT 3 ist.
chris_ schrieb:>>Das ist der Wert für die Peripheriefunktion D:>> Danke. Ich hatte die Zuordnung im Datenblatt gesucht, aber leider nicht> gefunden.
Siehe Screenshot.
Der Aufwand lohnt sich sich wirklich. Da die Funktionen der SAM Libs im
Hintergrund auch nichts anders machen. Aus dem Thread Titel dachte ich
er an etwas anderes.
Die SAM Libs ohne Atmel Studio z.Bsp mit Eclipse zu verwenden :)
>Der Aufwand lohnt sich sich wirklich.
Deinen Text habe ich nicht ganz verstanden: Meinst Du jetzt es lohnt
sich oder eher nicht?
>Die SAM Libs ohne Atmel Studio z.Bsp mit Eclipse zu verwenden :)
Das wäre der nächste Schritt. Da ich eher unter Linux arbeite, will ich
irgendwann auf Eclipse umstellen.
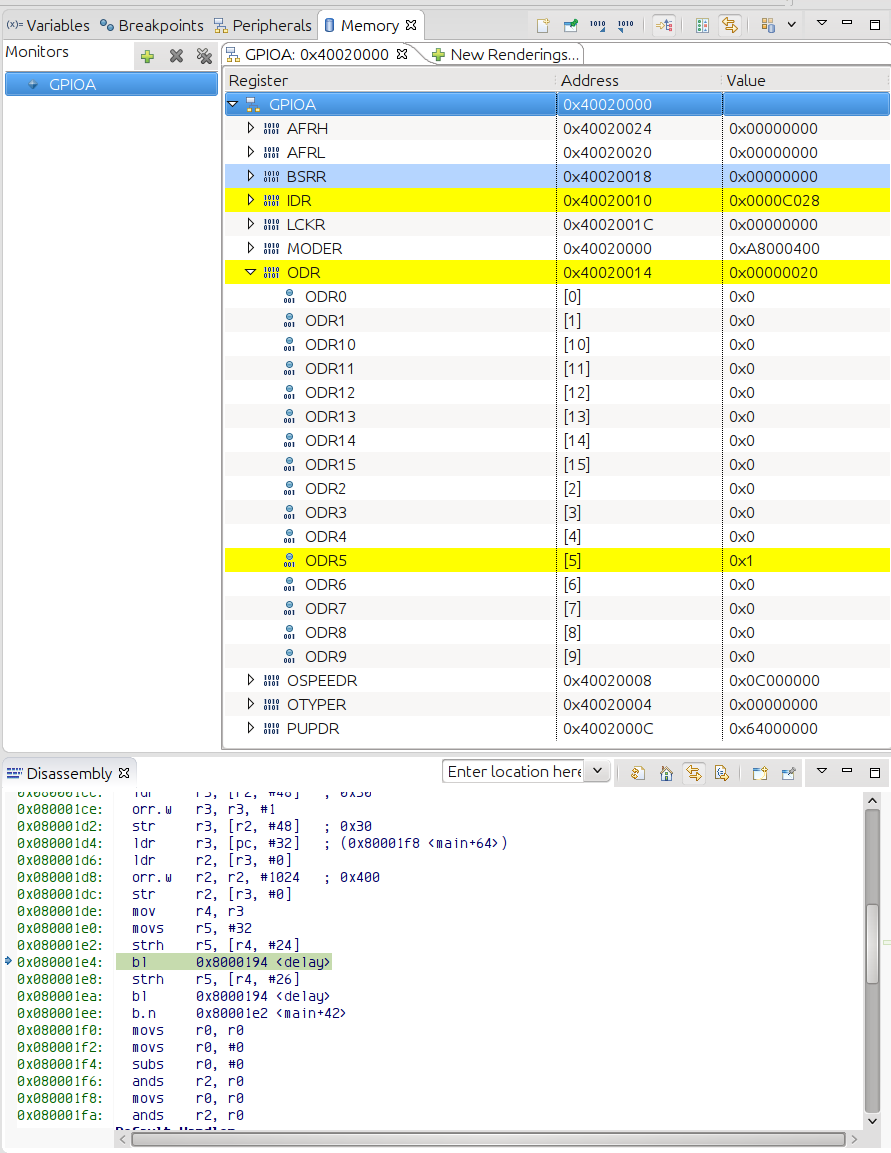
Für die BareMetal-Programmierung hat AtmelStudio aber erst einmal einen
großen Vorteil: Man kann sich im Debugger wirklich jedes Peripheral-Bit
anschauen.
Es lohnt sich nicht. Zumal man eine weitere Fehlerquelle aufbaut.
Ein weiteres Problem ist das die Funktionen nicht portable sind, sie
funktionieren nur für ein Device.
chris_ schrieb:> Für die BareMetal-Programmierung hat AtmelStudio aber erst einmal einen> großen Vorteil: Man kann sich im Debugger wirklich jedes Peripheral-Bit> anschauen.
Das geht in Eclipse auch, siehe Screenshot.
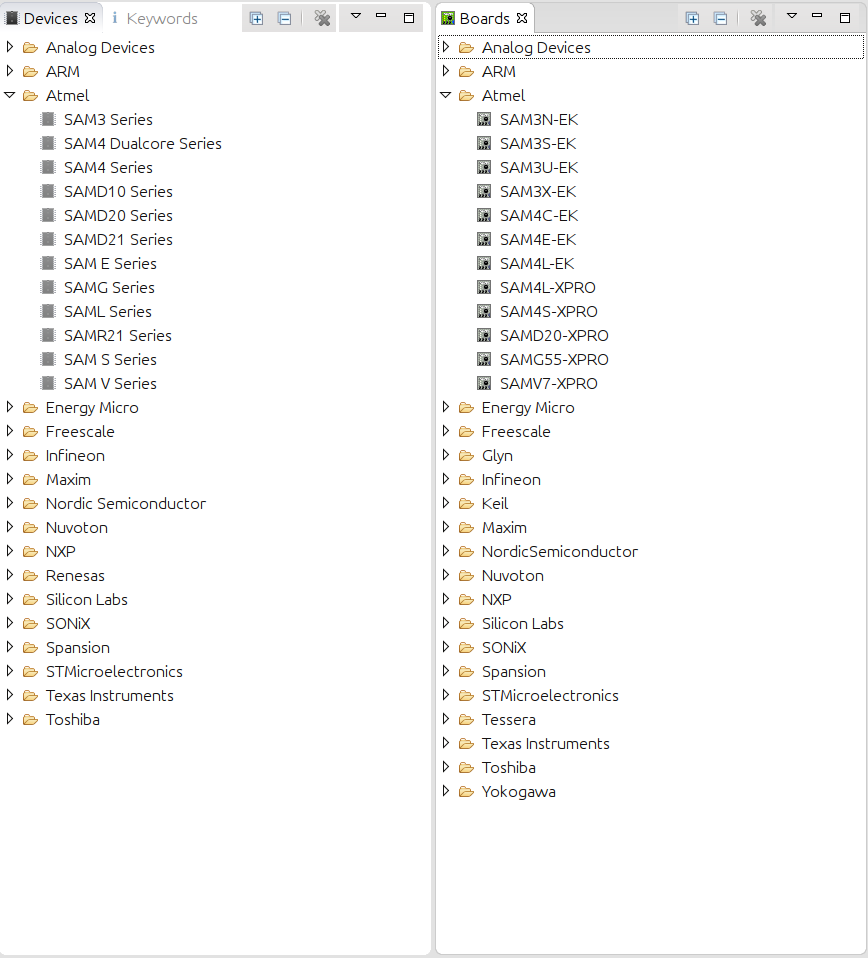
Oben ist zwar ein STM32 zu sehen, die Definitionen für Atmel SAM sind
aber auch vorhanden, siehe zweiter Screenshot.
hi,
da ich grade auch mit dem SAMD spiele und auch größten teils ohne ASF
(ich nehme mir das nötigste raus) arbeite, im Anhang ein SAMD10 template
(LED blink und fade auf dem SAMD10 Xplained) mit makefile :)
Danke, dass Du auch Code veröffentlicht hast. Dein Code ist schön
aufgeräumt und übersichtlich.
Wie ich sehe, hast Du die Real-Time-Clock (RTC) für die Funktion
"micros" verwendet.
Das hatte ich verworfen, weil ich vermutet habe, dass das "reload" nur
mit Interrupts geht und ich Interrupts vermeiden wollte. Wenn ich Deinen
Code richtig verstehe, geht es wohl auch ohne.
Ich habe statt dessen wie weiter oben gezeigt, TC2-TC3 verwendet.
Das hat den Vorteil, dass man später die RTC vielleicht für eine Uhr mit
32kHz Quarz im Standby verwenden kann.
Wenn ich es richtig sehe, gehst Du auf 48MHz.
Irgendwo im Datenblatt meine ich gelesen zu haben, dass man die
FLL-Clock für den Systemtakt lieber von einem langsamen Grundtakt
ableiten soll, weil die Regelung dann stabiler ist.
Hi,
gerne :) code Schnipsel aus dem Forum hier haben mir schon oft geholfen.
Der RTC läuft soweit ich weiß ganz normal über.
Zu den 48MHz ich nehmen ja den DPLL nicht den FLL.. aber auch hier muss
man recht seltsam die 8MHz erstmal runterteilen, nur um dann wieder hoch
zu gehen. aber es läuft so ganz gut.
chris_ schrieb:> dass man die FLL-Clock für den Systemtakt lieber von einem langsamen> Grundtakt ableiten soll, weil die Regelung dann stabiler ist.
Nein, man „soll“ nicht nur, sondern man muss. Der Eingang der FLL
ist darauf ausgelegt, mit dem 32-kHz-Oszillator (egal ob RC oder
Quarz) getrieben zu werden und nichts anderem.
Die PLL arbeitet anders, aber die hat der SAMD20 nicht.
> und ich Interrupts vermeiden wollte
Schlechter Ansatz.
>Schlechter Ansatz.
Sagst Du. Ich baue schon sehr lange, relativ große, synchrone möglichst
Interrupt freie System.
Insofern: Ansichtssache. Aber ich will darüber jetzt lieber keinen
Philosophiestreit beginnen. Nur so viel: man muss nicht immer das
machen, was andere machen.
chris_ schrieb:> Insofern: Ansichtssache.
Naja. Nein. Interrupts sind ein wesentlicher Bestandteil aller
Prozessoren. Es gibt keinen vernünftigen Grund, sie nicht zu
benutzen.
Ja, schon, für viele Sachen Probleme muss man Interrupts verwenden.
Interessanterweise hat der Parallax Propeller keinen Interrupts.
Gut, der Prozessor arbeitet ganz anders als die sonstigen Single-Core
Prozessoren, aber immerhin.
Irgend jemand hat mir mal erzählt, dass man nach neueren
Programmiermethoden möglichst ohne Interrupts programmiert. Ich fand die
Idee gut und versuche mich so lange es geht daran zu halten.
Pin lesen
=========
Gerade eben habe ich festgestellt, dass das Pin-Lesen im obigen
Code-Beispiel nicht funktioniert:
Beitrag "Re: ATMEL ARM SAMD ohne Framework programmieren"
Der Grund: man muss das INEN-Bit in dem zu dem Pin zugehörigen
PINCFG-Register setzen, sonst wird das Bit nicht "gesampled".
Sehr Ihr einen Grund, warum man INEN nicht immer eingeschaltet lassen
soll?
chris_ schrieb:> Interessanterweise hat der Parallax Propeller keinen Interrupts.
Dafür hat jede Task eine genau garantierte Zeit.
Du solltest dich mal mit der Hardware eines ARMs beschäftigen. Man kann
die Interrupts in der Priorität steuern. Somit auch das Zeitliche
Verhalten bei der Auslösung. Außerdem sorgt man dafür das die Routinen
möglichst kurz sind.
Aber auch die Hardware z.Bsp der DMA Controller hat einiges zu bieten um
zeitkritische Dinge zu erledigen.
>welches Beispiel meinst du genau?
Wenn Du auf den Link klickst, kommst Du genau zum Beispiel. Man kann im
MC-Netz die Links auf einen bestimmten Post setzen. Leider wird das
nicht angezeigt und es sieh so aus, als wenn der Link auf den Thread
Anfang zeigt.
Im Arduino-Code für den SAMD21
https://github.com/arduino/ArduinoCore-samd/blob/master/cores/arduino/wiring_digital.c
sieht man die benötigte Zeile:
Im Moment versuche ich gerade, die Main-Clock für ein selbst gebautes
Board mit einem SAMD20E17 hoch zu stellen.
Das Board startet mit 1MHZ, es soll aber mit 48MHz laufen.
Oben habe ich das Beispiel für das XPlained-Board mit dem SAMD20J18:
Beitrag "Re: ATMEL ARM SAMD ohne Framework programmieren"
Es funktioniert gut auf dem XPLained Board.
Wenn ich das Beispiel aber auf das andere Board übertrage, bleibt es in
der DFLL Synchronisation hängen.
1
// Enable the Generic Clock GEN 1 as DFLL48 as Reference
2
REG_GCLK_CLKCTRL=GCLK_CLKCTRL_CLKEN|
3
GCLK_CLKCTRL_GEN_GCLK1|
4
GCLK_CLKCTRL_ID(0);
5
6
==>while((REG_SYSCTRL_PCLKSR&SYSCTRL_PCLKSR_DFLLLCKF)==0);// wait for fine lock
Wie kann das passieren? Es sollte wohl keinen so großen Unterschied
zwischen einem SAMD20J18 und einem SAMD20E17 geben, oder?
chris_ schrieb:> Es sollte wohl keinen so großen Unterschied zwischen einem SAMD20J18 und> einem SAMD20E17 geben, oder?
Gewiss nicht. Vergewissere dich, dass der Eingangstakt der DFLL
auch tatsächlich stabil anliegt.
>Vergewissere dich, dass der Eingangstakt der DFLL>auch tatsächlich stabil anliegt.
Tja, guter Tipp. Zum Test habe ich mit Atmel-Start eine Konfiguration
für den externe 32kHz Oszillator gemacht.
Ergebnis: Nachdem ich es programmiert hatte, komme ich mit dem ATMEL-ICE
und SWDIO nicht mehr auf den Prozessor. Ich habe SWD-Clock auf 32Khz
runter gestellt, damit bei langsamem Systemtakt die Verbindung noch
klappt.
Ist der Prozessor jetzt verloren? So ähnlich wie beim AVR wenn man ihn
"ver-fused".
chris_ schrieb:> Ist der Prozessor jetzt verloren?
Hatte ich auch schon mal, Rettung klappte nur mit dem SAM-ICE (Segger).
Da habe ich einen Bugreport bei Atmel aufgemacht, und sie haben mir
dann irgendwann geantwortet, dass es mit einem aktuellen Studio 7 (und
der ICE-Firmware, die es mitbringt) repariert sei, was ich für mein
Beispiel bestätigen konnte.
chris_ schrieb:> Ist der Prozessor jetzt verloren? So ähnlich wie beim AVR wenn man ihn> "ver-fused"
Hat der SAMD20 tatsächlich keinen ROM Bootloader mehr? Habe im
Datenblatt gesehen:
"Unlike existing SAM products using a ROM monitor, on the Atmel SAM D20
SAM-BA is stored in flash memory"
Lothar schrieb:> Hat der SAMD20 tatsächlich keinen ROM Bootloader mehr?
Ja, hat er nicht. SAM-BA gibt's dafür jetzt bei Bedarf sogar als
Quellcode, während man früher ein tolles Geheimnis draus gemacht hat.
Das Teil hat einfach mal keinen ROM.
Leider offenbar auch kein Clock Fault, sonst hätte man den Oszillator
kurz stillgelegt was dann einen Clock Fault auslöst. Worauf dieser auf
den RC Oszillator umgeschaltet und dann in Hardfault geht.
Jörg W. schrieb:> Das Teil hat einfach mal keinen ROM
Dann muss ich aber sagen, das ist nicht gut. Praktisch alle anderen ARM
haben und sind somit un-ver-fuse-bar. Selbst die 8051 hatten eine Flash
Security Page im oberen Flash, wo man einen Bootloader
nicht-versehentlich-löschbar unterbringen konnte. SAM-BA beginnt bei 0
und kann somit jederzeit versehentlich überschrieben werden.
Lothar schrieb:> Praktisch alle anderen ARM haben und sind somit un-ver-fuse-bar.
Du wieder mit deiner Fusophobie.
Der ist auch nicht „verfuset“, es ist nur, dass ältere Firmwareversionen
des Atmel-ICE da einen Bug haben und das Ding nicht sauber in den
Reset gezogen haben, bei dem man zumindest erstmal wieder den Flash
löschen kann.
Ich denke, man wird sich dran gewöhnen dürfen, dass die Sonderlösung
„Device mit Masken-ROM“ ein Auslaufmodell ist, denn sie generiert
nur Kosten für vergleichsweise wenig Gewinn. Wenn man also die Kosten
runterbringen will, verzichtet man auf solche Kinkerlitzchen.
Mittlerweile kann ich ihn wieder programmieren.
Wenn ich das Oszi an den 32kHz Quarz gehalten habe, konnte ich keine
Schwingung sehen. Deshalb habe ich ein Kabel an XIN ( PA0, Eingang für
den 32kHz Quarz ) angelötet um extern den Takt einzuspeisen ( Der Trick
hatte schon mal beim AVR geklappt ). Auf dem Board sind für 32kHz XTAL
keine Cs.
Scheinbar hat aber das Kabel gereicht, um den Oszillator anzuschwingen.
Dann habe ich den Clock scnell wieder auf den internen 8MHz Osczi
umprogrammiert.
Naja, wie schon geschrieben, mit der aktuellen ICE-Firmware bekommst
du den Controller jederzeit wieder losgeeist. Allerdings brauchst du
dafür das Studio 7.
>Der ist auch nicht „verfuset“, es ist nur, dass ältere Firmwareversionen>des Atmel-ICE da einen Bug haben und das Ding nicht sauber in den>Reset gezogen haben, bei dem man zumindest erstmal wieder den Flash>löschen kann.
Das hier gibt die Tool information aus:
Atmel-ICE
Debug host 127.0.0.1
Debug port 51159
Serial number J41800039355
Connection com.atmel.avrdbg.connection.cmsis-dap
Features 1
Firmware Version 1.1c
Hardware Version 0
Beim ersten einstecken vor ca. 4 Wochen wurde der ATMEL-ICE von
AVR-Studio 7 auf die Firmware-Version 1.1.c aktualisiert.
chris_ schrieb:> Beim ersten einstecken vor ca. 4 Wochen wurde der ATMEL-ICE von> AVR-Studio 7 auf die Firmware-Version 1.1.c aktualisiert.
1.1c (hex) = 1.28 (dezimal)
Ja, das ist in der Tat die aktuelle Version. Damit hätte es dir
zumindest gelingen sollen, den Controller zu löschen. Wenn das nicht
geht, solltest du Atmel einen Bugreport bescheren.
Jörg W. schrieb:> Damit hätte es dir zumindest gelingen sollen, den Controller zu löschen
Versuch es mal mit der niedrigsten Taktfrequenz mit "force the debugWIRE
speed" oder / und "use external reset"
Jörg W. schrieb:> „Device mit Masken-ROM“ ein Auslaufmodell
Zumindest NXP sieht das anders, alle neuen LPC kommen mit riesigem ROM
nicht nur mit Bootloader sondern APIs für UART, SPI, I2C, USB, sogar
einer mit CANopen Stack. Scheint also billiger zu sein als mehr Flash
dafür zu spendieren. Könnte natürlich damit zusammenhängen, dass
schneller Flash (ohne Waitstates) teuer ist. Andererseit ist ja leider
noch nicht raus, ob LPC oder Kinetis erhalten bleiben.
Lothar schrieb:> Versuch es mal mit der niedrigsten Taktfrequenz mit "force the debugWIRE> speed" oder / und "use external reset"
DebugWIRE? Das ist kein AVR.
> Jörg W. schrieb:>> „Device mit Masken-ROM“ ein Auslaufmodell>> Zumindest NXP sieht das anders, alle neuen LPC kommen mit riesigem ROM> nicht nur mit Bootloader sondern APIs für UART, SPI, I2C, USB, sogar> einer mit CANopen Stack. Scheint also billiger zu sein als mehr Flash> dafür zu spendieren. Könnte natürlich damit zusammenhängen, dass> schneller Flash (ohne Waitstates) teuer ist.
Dafür darfst du für jeden Bugfix auf eine neue Siliziumversion warten.
Klar, Flash ist nicht so schnell, das wäre so ziemlich der einzige
wirkliche Pluspunkt. Dafür bin ich dann mit meiner Software an diesen
Hersteller gebunden und kann sie nicht einfach mal schnell woanders
hin portieren.
Jörg W. schrieb:> DebugWIRE? Das ist kein AVR
Habe kein Atmel-ICE vor mir, aber die Option, die DEBUG CLK auf ein
Minimum zu setzen gibt es wohl auch für SWD:
"Debug sessions on SAM target devices over the SWD interface can be
clocked at up to ten times the CPU clock (but limited to 2MHz max)"
Wenn die DEBUG CLK sehr langsam ist, kommt der Debugger eventuell direkt
nach dem Reset rein, vor der PLL. Dann könnte man sich eventuell das
beschriebene Anschliessen eines externen langsamen Quarz sparen.
> Dafür darfst du für jeden Bugfix auf eine neue Siliziumversion warten
Gibt natürlich ein Patch EEPROM :-)
> Dafür bin ich dann mit meiner Software an diesen Hersteller gebunden und> kann sie nicht einfach mal schnell woanders hin portieren
"Schnell" eine Software zwischen ARM von verschiedenen Herstellern
portieren? Will ich sehen (trotz CMSIS). Zudem hat LPC für die ROM
Treiber Lizenzen gekauft (USB VID, CANopen), die sind also dabei. Für
Software Stacks wären die sehr teuer.
Lothar schrieb:>> Dafür bin ich dann mit meiner Software an diesen Hersteller gebunden und>> kann sie nicht einfach mal schnell woanders hin portieren>> "Schnell" eine Software zwischen ARM von verschiedenen Herstellern> portieren? Will ich sehen (trotz CMSIS).
Auf jeden Fall noch langsamer, wenn du für die Portierung dann auch
noch die ROM-Routinen ersetzen musst.
> Zudem hat LPC für die ROM> Treiber Lizenzen gekauft (USB VID, CANopen), die sind also dabei. Für> Software Stacks wären die sehr teuer.
Mit CAN hab' ich keine Ahnung, aber die USB VID zu benutzen, gestatten
auch andere Hersteller ihren Kunden, auch ganz ohne ROM. Bei Atmel
darfst du beispielsweise die VID:PID-Paare aus ihren Beispielcodes für
die jeweilige Funktionalität benutzen. Bei Microchip kann man sich,
glaub' ich, mit seinem Produkt registrieren.
>Habe kein Atmel-ICE vor mir, aber die Option, die DEBUG CLK auf ein>Minimum zu setzen gibt es wohl auch für SWD:
Ja, man kann die Geschwindigkeit heruntersetzen. Das habe ich ja oben
schon beschrieben und gemacht: 32kHz.
Aber es ging trotzdem nicht.
Jörg W. schrieb:> Auf jeden Fall noch langsamer, wenn du für die Portierung dann auch> noch die ROM-Routinen ersetzen musst
Das führt jetzt doch etwas vom Thema weg, aber z.B. die LPC ROM-Routinen
für USB sehen so aus:
(*rom)->pUSBD->init_clk_pins();
(*rom)->pUSBD->init(&DeviceInfo);
(*rom)->pUSBD->connect(TRUE);
void USBIRQ_IRQHandler()
{
(*rom)->pUSBD->isr();
}
Alles andere ist im Software Stack (den es für LPC ja auch gibt: LPCopen
oder USBlib) gleich, also Device Descriptor bestücken, Report Funktionen
schreiben und als Callback registrieren.
Und wenn jetzt ein anderer ARM diese ROM-Routinen nicht hat, dann muss
man genau dafür die Library-Funktionen von diesem Hersteller rein
kopieren. Das ist jetzt nicht der Mehraufwand. Den würde ich woanders
sehen.
chris_ schrieb:> Ja, man kann die Geschwindigkeit heruntersetzen. Das habe ich ja oben> schon beschrieben und gemacht: 32kHz.> Aber es ging trotzdem nicht.
Das sind dann so 30 us das könnte immer noch zu kurz sein um direkt nach
dem Reset reinzukommen.
So langsam verstehe ich warum du dir die Mühe machst. Mir wurde ein
Arduino Zero auf den Tisch geschoben. Auch noch die abgespeckte Version.
Also mir ist es nach 20 Versuchen nicht gelungen mit der IDE etwas drauf
zu schieben. Da jemand so schlau war den Taster vom Bootloader
wegzulassen. Nach den Start geht er also sofort in den Bootloader und
man hat 5sec um den richtigen Moment zu treffen. Also mit USB Balim
Balim -> ich habe es aufgegeben.
Ok also SWD Kabel zusammen gefummelt und so was mit J-link -> (auf die
Adresse achten oder linker Script anpassen) aufgeschoben.
Resultat das es beim system_init() hängen bleibt und zwar an der
Funktion die erst mal den Clock von den PERIPHERAL ausschaltet die in
der clock_conf.h nicht an sind.
Beim dritten bleibt er hängen und wartet auf den sync -> vergeblich.
Dabei wurde an der Clock noch nichts konfiguriert. Läuft nach dem Start
intern 8MHZ /8 = 1MHZ
Ohne system_init() kann ich auch Ports setzen etc. , aber nur mit 1MHZ.
Einstellungen in der clock_conf.h bleiben wirkungslos da sie erst danach
verarbeitet werden.
Jemand eine Idee was da schief läuft? Da in Atmel Studio es kein Board
Projekt dafür gibt habe ich es aus dem Devices zusammen gebaut.
Also doch eigenen Funktionen bauen ;)
Den externen 32kHz Quarz wollte ich verwenden, um auf die 48Mhz zu
kommen.
Da mir dadurch der Prozessor hängen geblieben ist, habe ich das Problem
erst mal ignoriert und bin vorerst mit 8MHz zufrieden:
Ursprünglich hatte ich den ARDUINO-ZERO-Pro.
Dort hat es auch ein Weile gedauert, bis ich ihn über AVR-Studio
programmieren konnte.
Der entscheidende Tipp kam von Jürgen M. :
"Ich musste bei den Fuses im Programmdialog NVMCTRL_BOOTPROT auf 0x07
stellen, um programmieren zu können.
Danach kann man aber nicht mehr über die Arduino-IDE flashen"
Beitrag "Re: Arduino Zero Pro - Kommunikation über EDBG-Chip"
>Jemand eine Idee was da schief läuft? Da in Atmel Studio es kein Board>Projekt dafür gibt habe ich es aus dem Devices zusammen gebaut.
Du könntest ein AtmelSTART Projekt in ATMEL-Studio importieren, falls Du
nicht "nativ" programmieren willst:
Beitrag "Arduino Zero mit ArduinoStart Konfigurieren"
Lothar schrieb:> Andererseit ist ja leider> noch nicht raus, ob LPC oder Kinetis erhalten bleiben.
Naja, ich vermute mal, daß es den Kinetis so ähnlich ergeht wie den
BlueStreaks. Das Spielchen hatten wir ja schon mal - und der Bursche,
den ich auf der Embedded ohne so rechten Erfolg auszuquetschen versucht
habe, meint zu den Kinetis nur "solange die Kunden sie kaufen...".
Bei den Kinetis stören mich zwei Dinge: die Doku und das Fehlen des
residenten Bootladers. Und bei den LPC stört mich eigentlich nur, daß
die M4F-Fraktion eigentlich nur aus Boliden besteht, dabei gibt es
garantiert einen recht ordentlichen Markt für 48..64 pinnige M4F mit ca.
100 MHz und 32..128K Flash nebst 8..32 K Ram.
W.S.
Hmm also mit dem Atmel Start geht es erst mal. Ich vermute das etwas
beim ASF mit dem PM fehl schlägt. Der Bootloader bringt ja das Board
zuerst in Gang und springt dann in den Anwender Code. Der versucht dann
den Clock konfigurieren und das schlägt fehl. Warum, keine Ahnung
bekomme ich noch raus ;)
http://www.atmel.com/Images/Atmel-42258-ASF-Manual-SAM-D21_AP-Note_AT07627.pdf
damit kann ich was anfangen.
Nach langen suchen ... Das Problem bei Atmel das man nie das findet was
man gebrauchen kann. Einfach grausam.
W.S. schrieb:> das Fehlen des> residenten Bootladers.
Wozu soll sowas gut sein? Im industriellen Umfeld werden (falls
benötigt) eh individuelle (eigene) Bootloader verwendet die irgendwelche
speziellen Anforderungen erfüllen (zum Beispiel kompatibel zu sein zu
den Bootloadern und den zugehörigen Tools die man schon seit x Jahren
auf y anderen Plattformen verwendet).
Tja der Schreibschutz für den Generator ist aktiv. WRTLOCK für den
Generator ist 1 und damit wartet die schleife vergeblich das dass BIT
CLKEN 0 wird.
Dieser ist auf die ID 3 -> WDT gelegt.
>Hmm also mit dem Atmel Start geht es erst mal.
Das ist der Vorteil der vorgefertigten Konfigurationen: sie gehen erst
mal, wenn man nicht mehr will als vorgesehen.
>Der Bootloader wird wohl das WRTLOCK setzen.
Ich bin mir nicht sicher, ob ich Deine Beschreibung richtig verstanden
habe:
Versuch 1: AtmelSTART verwenden, mit Bootloader laden ==> geht
Versuch 2: ASF verwenden, mit Bootloader laden ==> geht nicht
Wenn das so ist, würde das Problem in der ASF liegen.
Also das Start Projekt wird auch ein Bootloader verwendet. Das
Linkerscript enthält.
1
MEMORY
2
{
3
rom(rx):ORIGIN=0x00000000,LENGTH=0x00040000
4
ram(rwx):ORIGIN=0x20000000,LENGTH=0x00008000
5
}
Ich habe jetzt nicht geschaut was im ROM bzw. im RAM einsortiert wird.
Ewt wird auch nur von dort in den RAM gesprungen.
Im Bootloader wird der Generator jednefals nicht geblockt. Wäre ja auch
Blödsinn. Da sich dieser nur per PowerOn wieder zurücksetzen lässt.
Ich bin auch der Meinung das am ASF was fault ist. An der kann es kaum
liegen da noch kein Clock konfiguriert wurde. Es bleibt ja bei
Ausschalten schon hängen. Das Problem ist offenbar nicht so unbekannt.
Also man kann doch erwarten wenn man ein Pojekt aus einen Device erzeugt
das dies läuft. Wie gesagt ich habe nichts hinzugefügt bzw. um
konfiguriert und es hängt sich beim system_init schon auf. Das an einer
Stelle die man eigentlich abfangen sollte. Das man einen Generator
ausschalten möchte der geblockt ist sollte man schon bedenken und dies
so lösen das es zu mindestens weiter geht.
Marco H. schrieb:> Ich bin auch der Meinung das am ASF was fault ist.
Das kann gut sein, aber dann bist du hier im falschen Thread.
Der TE hat diesen Thread ja ausdrücklich ins Leben gerufen für die
Programmierung dieser Teile ohne Frameworks wie ASF.
Also die Erkenntnis ist folgende.
Die Funktion _switch_peripheral_gclk schaut in die clock_conf ob irrend
ein Generator ausgeschaltet ist.
1
2
for(gclk_id=0;gclk_id<GCLK_NUM;gclk_id++){
3
system_gclk_chan_set_config(gclk_id,&gclk_conf);
4
}
Dann läuft folgendes ab. Es laufen alle möglichen Channels durch und
jede Peripherie die damit verbunden ist wird ausgeschaltet, genau 37
Channels sind das.
Beim WDT scheitert das ganze, nach einen Reset ist dieser standardmäßig
auf einen GCLK geschaltet und ewt. gelockt. Der Bootloader löst ein SW
Reset aus worauf Clock und WDT sich neu Konfigurieren, siehe Referenz..
Das deaktivieren schlägt aus diesen Grund wohl fehl. Ewt. muss erst der
WDT deaktiviert werden bevor man an dem GCLK fummelt.
Also auch ohne Bootloader ist der WDT aktiv und verriegelt inkl. dem
GCLK der ihn treibt. Ich bin fast der Meinung hier wurde ein
Montagsmodell verbaut.
Marco H. schrieb:> Ich bin fast der Meinung hier wurde ein Montagsmodell verbaut.
Vergiss diese Idee ganz schnell. Sie zeigt nur, dass du keine Ahnung
hast, wie solche ICs hergestellt werden. ;-)
Dann erkläre mir Bitte wie das lock da rein kommt ?
Der Code ist Simple und ich habe nachgeschaut was aufgerufen wird. Mit
dem GCLK und das der WDT an ist nach einen Reset steht in der Referenz
aber gelockt ? Macht ja keinen Sinn.
Der WDT lässt sich nicht mehr konfigurieren.
Ich habe das jetzt so gelöst.
1
while(GCLK->CLKCTRL.reg&GCLK_CLKCTRL_CLKEN){
2
/* Wait for clock to become disabled */
3
/* abort when GCLK is lock */
4
if(GCLK->CLKCTRL.bit.WRTLOCK)break;
5
6
}
Wenn der GCLK geblockt ist wird die schleife abgebrochen. Das schlimmste
was passiert das dieser weiter läuft.
Was noch sein kann das die Registeradresse nicht stimmt da irrend wo das
Devices nicht definiert ist. Da muss ich nochmal genau prüfen ...
Komisch ist aber das auch beim Start Projekt der WDT genau den selben
Status aufweist. Selbst das hier verlinkte Projekt mit dem DFLL hat der
WDT und der Clock den selben Status.
Nach dem die erste Hürde genommen wurde habe ich mit der Hardware etwas
gespielt.
Tja du hattest recht das ASF lässt viele Sachen offen. Wichtige
Mechanismen sind in den Funktionen nicht enthalten. Man muss auf
Registerebene an vielen Stellen nachhelfen um zum gewünschten Ergebnis
zu kommen.
Die Zeit die man braucht die ASf Funktionen nach ihrer Funktionsweise zu
untersuchen nimmt sich nicht viel wenn man die Register direkt setzt
bzw. dies in eigene Funktionen packt.
Immerhin weiß man dann was passiert und es bleibt nicht schon beim
system_int() hängen ;)
Beim SAM3x ist das etwas besser und verständlicher gelöst.
Ich habe jetzt weder mit dem SAM noch dessen Framework was gemacht. Wie
geht ihr denn da ran bei BoneProgramming? Bei den stm´s habe ich das so
gemacht, dass ich zunächst im Manual das Kapitel einer Peripherie
quergelesen habe (um eine prinzipielle Idee zu bekommen), dann in der
IDE mit "goto definition" das Framework "reverse-engineert" habe und
dann noch mal detailierter ins Manual geschaut habe.
Also erst mal die Referenz durcharbeiten, um die Hardware zu verstehen.
Dann stellt sich auch heraus ist das Devices auch das richtige für mein
Projekt ? Lassen sich die gewünschten Abläufe überhaupt verwirklichen ?
Welche zusätzliche Hardware wird benötigt ? Wie lässt sich diese
anbinden ?
Dann muss man hoffen das dass Framework irrend wo beschrieben ist. Die
grobe Anleitung zum Benutzen sollte ja in den Header Files vorhanden
sein.
Das obligatorische "Blinky" bekommt man recht schnell zum laufen ;) Beim
clock,Timer,DMA,Schnittstellen wird es schon schwieriger.
Funktioniert es nicht wie gewollt muss man eben schauen ob die
Mechanismen aus der Referenz in den Funktionen umgesetzt wurden.
Das ganze dauert natürlich seine Zeit. Mit einer Deadline im Hintergrund
ist es ganz schlecht sich in einen neuen Device einzuarbeiten.
Hi,
Ich bin grade dabei. "Umstieg" von STM32 zu SAM.. ein Umstieg ist es
nicht wirklich da ich auch weiterhin mit den STM32's Arbeiten werde.
Bisher muss ich sagen das sich beim SAM die Funktionsweisen einfacher
aus dem Datenblatt als aus der ASF ableiten lassen. bei den STM32's
waren die Librarys für mich viel hilfreicher.
Was ich Außerdem bei den STM32 libs besser finde ist das die viel
unabhängiger voneinander ist. Man kann einfach einen Teil rausnehmen und
benutzen. bei der ASF hängt immer irgendwie alles zusammen. Und bevor
man es geschafft hat einen Teil alleine in betrieb zu nehmen, hat man es
schneller von Hand geschrieben ;)
.. also das ist meine subjektive Wahrnehmung :)
Marco H. schrieb:> Dann erkläre mir Bitte wie das lock da rein kommt ?
Gerne :) denn ich habe die Lösung gefunden !
Das oben genannte trifft soweit zu der WDT ist aktiv und der Clock der
ihn Treibt ist verriegelt.
Das Geheimnis steckt im evm Controller. Mit dem kann man ein EEROM
emulieren. Da der Bereich wo der Bootloader ist schreibgeschützt ist
lassen sich hier Parameter unterbringen die beim Boot geladen werden
sollten.
Hier zu wird ein Bereich im RAM reserviert bzw. bei einigen ist dieser
schon vorhanden. Da ich das Teil erst mal Blank gemacht habe stand hier
auch nichts drin. Womit das oben genannte auftrat beim PowerOn.
Folgender Code behebt das Problem
Es setzt die entsprechenden FuseBits in einen reservierten Teil des
RAMs.
Um die Konfiguration zu aktivieren muss man die Stromversorgung trennen
! So lange man den Bereich nicht überschreibt ändert sich am Verhalten
nichts. Macht man das Devices allerdings Blank muss man die Fusebits
wieder setzen.
Man kann diese auch Auslesen und ggf. setzen und dann einen PowerOn
reset auslösen. Genau das hat Atmel in ihren ASF nicht gemacht.
Mit Bootloader etc. ist die Konfiguration natürlich anzupassen. Also
Vorsicht wenn man den Chip komplett löscht man muss aufpassen in welche
Bereiche man schreibt. Durch den WDT geht dieser auch dann noch zyklisch
in den Reset.
Das hat mich 1 Tag meines Lebens gekostet ;) Das müsste man eigentlich
irrend wo annageln.
Marco H. schrieb:> Das müsste man eigentlich irrend wo annageln.
Vielleicht hier eine Wiki-Seite für die SAMD (und Konsorten) anfangen?
Da könnte auch dieser oder jener Beispielcode mit rein.
Könnte man ;) Aber wenn man mal so schaut sehr gängig ist das Devices
nicht. Obwohl ein SAMD21G18 auf dem Arduino Zero ist.
Ich könnte noch einen weiteren Pferdefuß zum besten geben -> Thema
PinMux. Das hat mich nur 2 Kaffee Längen gekostet. Dies ist auch so
herrlich missverständlich in der ASF Dokumention beschrieben.
Marco H. schrieb:> Könnte man ;)
Mach doch.
> Aber wenn man mal so schaut sehr gängig ist das Devices> nicht.
Nun, Atmel hat das Renovieren seiner ARM-Linie wohl bisschen lange
vor sich her geschoben. Die alten SAM3/4 wirken in vieler Hinsicht
doch etwas antik vom Design. Sie haben sich dann vor paar Jahren
drauf besonnen, dass man der ARMada der Konkurrenz :) auch mal was
moderneres entgegensetzen müsste, sodass sich SAMD & Co. nun erst
allmählich ihren Weg bahnen.
> Ich könnte noch einen weiteren Pferdefuß zum besten geben -> Thema> PinMux.
Erzähl mal, was denn?
>Nun, Atmel hat das Renovieren seiner ARM-Linie wohl bisschen lange>vor sich her geschoben. Die alten SAM3/4 wirken in vieler Hinsicht>doch etwas antik vom Design. Sie haben sich dann vor paar Jahren>drauf besonnen, dass man der ARMada der Konkurrenz :) auch mal was>moderneres entgegensetzen müsste, sodass sich SAMD & Co. nun erst>allmählich ihren Weg bahnen.
Obwohl die Arduinos die SAM-Arms benutzen, scheint STM in punkto
Bastler-Verbreitung vorne zu liegen. Da gibt es den tollen Teensy 3.2
und viel extrem billige Arduino-Uno ähnliche Boards mit USB
Schnittstelle wie die Maple Mini:
http://www.rogerclark.net/stm32f103-and-maple-maple-mini-with-arduino-1-5-x-ide/
Die scheinen so um 4.50$ zu kosten, was schon sehr günstig für
Arm-Platinen ist.
Etwas ähnlich günstiges habe ich für die SAMD noch nicht gefunden.
Ich glaube, dass solche Bastlerware durchaus zur Verbreitung von
Prozessoren in der Industrie beitragen kann. Es hat ja eine ganze Weile
gedauert, bis die Entwicklungsboardhersteller begriffen haben, dass Sie
ihre Boards irgendwie Arduino-kompatible erscheinen lassen. Mittlerweile
gibt es von fast jedem Hersteller Boards mit dem etwas verunglückten
Arduino-Header.
Tja, auf das Internet ist nicht immer Verlass. Der obige Code lässt sich
nicht compilieren weil die Clock-Configuration nicht stimmt.
Hier die korrigierte Initialisierung des Clocks:
1
GCLK->CLKCTRL.reg=GCLK_CLKCTRL_ID_SERCOM0_CORE|// connected SERCOMx to