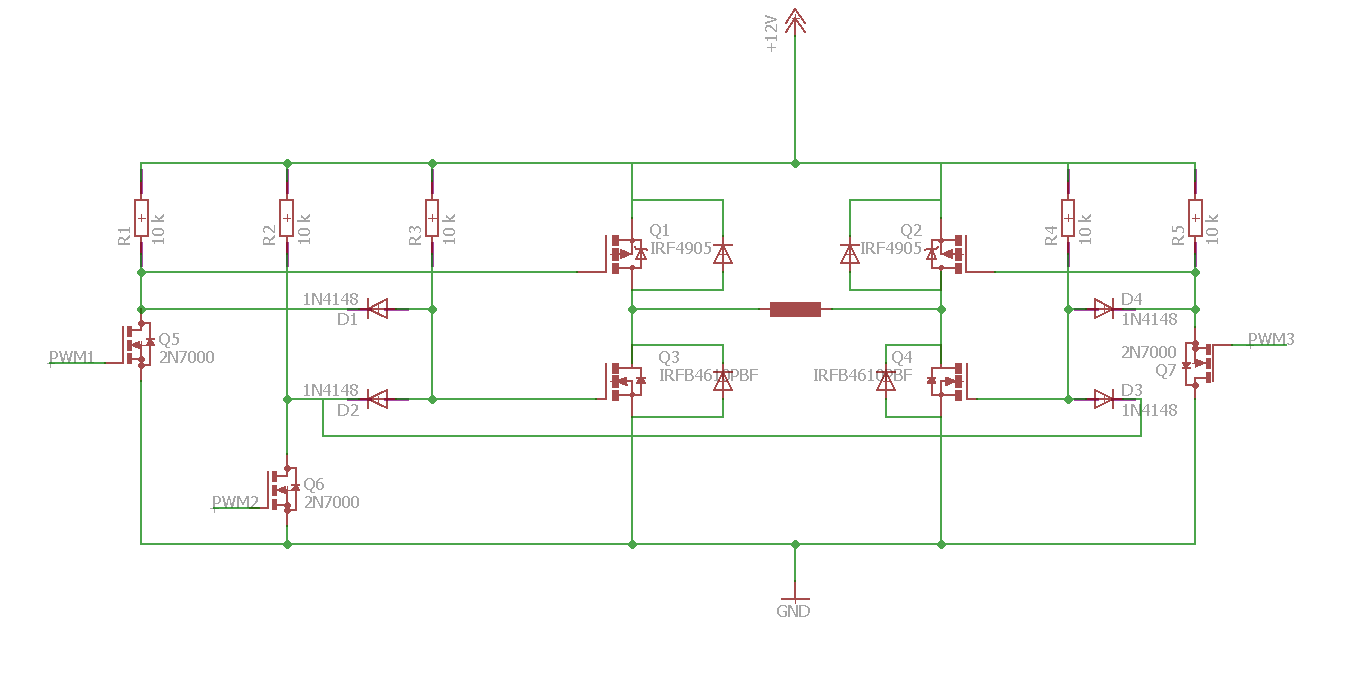
Hallo, ich habe am Wochenende mit Hilfe einiger Tutorials folgende H-Brück entworfen. Ich will einen Motor mittels PWM von einem Arduino betreiben. Die Versorgungsspannung beträgt dabei 12V. Außerdem hat der Motor einen Nennstrom von 4,5A. 1. Jetzt stellt sich mir die Frage ob es auch möglich ist die Eingänge für den R/L-lauf mit dem IRF4905 mit einem digitalen Signal statt PWM zu betreiben. Somit könnte ich ja theoretisch den Eingang PWM1/PWM2 zusammenfassen und es wäre nur ein logisches Signal notwendig. 2. Jedoch müsste der MOSFET dabei für einen Linearbetrieb ausgelegt sein oder? 3. Muss außerdem noch ein R/C-Glied geschalten werden um einen Shoot-through zu vermeiden oder kann der getrost entfallen? 4. Muss die H-Brücke auch gegen den Reset des Arduinos abgesichert werden? Oder sollte das keine "gravierenden" Probleme verursachen? Ich danke euch für eure Hilfe/Beratung. Gruß Max PS: Und bitte keine "benutz einen fertige IC-Treiber"-Kommentare. Daraus wäre der Lerneffekt gleich null und das soll nicht das Ziel sein. (nicht böse gemeint)
Angehängte Dateien:
-

H-Bruecke.PNG
7,4 KB
Auch nicht böse gemeint: bevor du das wahrscheinlich schwierigste Projekt überhaupt angehst, nämlich einen ausfallsicheren Servoregler, schnapp dir besser erstmal einen einzelnen Mosfet, und betreibe den mit unterschiedlichen Frequenzen. Schon lernst du ne ganze Menge, und kommst deinem Vorhaben 10% näher. Die nächsten 20% lernst du, wenn du eine Kleinleistungs-Halbbrücke aufbaust. Bis du damit fertig bist, fließt noch viel Wasser die Spree herunter. Vorher können wir dir nicht helfen, weil wir nicht wissen, wo wir anfangen sollen!
Meine Frage bezieht sich nicht auf eine ausfallsicheren Servoregler , sondern ob die Mosfets so (siehe Anforderungen) richtig dimensioniert sind. Und die h-Brücke so betrieben werden kann. Danke Max. Der Rest dient nur als Zusatzinformation.
Die Gateansteuerung ist so schnarchlangsam dass dir der Kram schon bei kleinen Strömen extrem warm wird. Mal Zeitkonstante RC ausgerechnet mit C=Ciss+Coss (Datenblatt) und R=10kOhm? Da kannste der Spannung ja beim Ansteigen zugucken. Bei den Vorraussetzungen isses mir zuviel Arbeit die FETs zu googlen. Die sind aber vermutlich auch nicht das Problem. Gateansteuerung nicht per Pull-Up Widerstand sondern mit Totem Pole Endstufe. Und statt den asymmetrischen Schaltzeiten per Diode würde ich jeden einzelnen FET an nen µC Pin hängen. Dann kannst du die Totzeit per Software einstellen. Für die Gatetreiber reichen auch billige Bipolartransistoren, ich nehme häufig BC640 und 2n3904. Alternativ: https://de.wikipedia.org/wiki/Gate-Treiber Geht auch mit Logikgatterbausteinen, MOS4007 (CMOS Inverter) wäre meine Wahl. Oder halt direkt Gate Treiber ICs, IR2104 und die tausend anderen Typen die es da gibt. Hat den Vorteil dass man da ohne viel Aufwand direkt in die Nähe von den angebenen ca. 150ns rise time kommt und High Side n-FETs nehmen kann.
Du wirst mit deiner Schaltung auch deswegen nicht viel Freude haben, weil du die Aus- und Einschaltzeiten der MOSFets ignorierst und den P-kanal schon öffnest, während der N-Kanal gerade zu geht, das gibt satte Shoot-Throughs. Warum überhaupt 3 PWM Signale? Nimm 2 und steuere die diagonal gegenüberliegenden MOSFet an, dann ist das nahezu idiotensicher, so habe ich das mal gelöst: Beitrag "Re: RC-Servoelektronik für DC-Motor"
Sascha schrieb: > Die Gateansteuerung ist so schnarchlangsam dass dir der Kram schon bei > kleinen Strömen extrem warm wird. Mal Zeitkonstante RC ausgerechnet mit > C=Ciss+Coss (Datenblatt) und R=10kOhm? Da kannste der Spannung ja beim > Ansteigen zugucken. Erstmal danke für den Beitrag. Mit der Formel tau = R*(Ciss+Coss) bekomme ich ein Ergebnis von tau = 48us. (bei IRF4905) und tau = 310ns(bei 2n7000) den Tipp mit der Totem-Pole Endstufe schau ich mir nächste Woche noch einmal genauer an. Danke Matthias für deinen Tipp. Ich habe gesehen, dass du mit 2 Gatetreibern / 2 High Side Mosfets und 2 Logic Level nKanal Mosfets arbeitest. Auch eine interessante herangehensweise. Die Widerstände an den Gatetreibern sind auch einfache Pull Ups richtig? Aber das wäre doch genau die Bauart welche von @Sascha reklamiert wurde. Durch den geringeren Widerstand hast du natürlich (laut Formel) eine geringere Rise-Time. Würde ein geringerer Pull-Up (in deinem Fall 2k2) also auch bei mir ausreichen ? Ich werde mich die kommende Woche mit euren Vorschlägen genauer befassen. Danke für die Informationen.
Der Unterschied liegt in der Ansteuerung, die beiden oberen Mosfets bleiben angeschaltet und nur die beiden unteren bekommen PWM. Und die hängen direkt am µC und der hat Schaltzeiten die deutlich unter 1µs liegen. Die FETs müssen dazu Logic Level sein. Normal müsste man nen 220Ohm Widerstand in Reihe zum µC Pin schalten damit der maximale Pinstrom nicht überschritten wird. Erfahrungsgemäß halten die AVRs auch deutlich mehr Strom aus, daher funktioniert das. Aber wenn man sich ans DB hält isses eigentlich eine Vorgehensweise wo Atmel nicht mehr garantiert dass der AVR das auch langfristig überlebt.
Sascha schrieb: > Der Unterschied liegt in der Ansteuerung, die beiden oberen Mosfets > bleiben angeschaltet und nur die beiden unteren bekommen PWM. Und die > hängen direkt am µC und der hat Schaltzeiten die deutlich unter 1µs > liegen. Hallo Sascha, bist du dir sicher? Sind die oberen MOSFETS (p-Kanal / Schaltung @Uwe S.) nicht ebenfalls mit dem PWM Ausgang über Q5/6 verbunden (Gatetreiber) und somit nicht dauerhaft eingeschaltet sondern ebenfalls abhängig von der PWM Frequenz? Dass es sich bei den unteren MOSFETs um n-Kanal LL handelt war mir soweit klar.
Auch ich bin immer skeptisch, wenn man die - in diesem Falle wichtigen - Umschaltphase nicht beeinflussen kann. Deine Schaltung arbeitet ja nach dem Ent-oder-Weder-Prinzip. Berücksichtigt also nicht die Zeit, die z.B. die "oberen" FETs zum Abschalten brauchen, während die "unteren" FETS zum Einschalten überredet werden... Ob das ganze also funktioniert – der Zufall ist ein Schelm - kann man an der Stromaufnahme (Oszilloskop) oder der Temperatur der FETs feststellen. Vielleicht auch an der Austauschhäufigkeit der beteiligten Bauteile.
max schrieb: > Die Widerstände an > den Gatetreibern sind auch einfache Pull Ups richtig? Aber das wäre doch > genau die Bauart welche von @Sascha reklamiert wurde. Durch den > geringeren Widerstand hast du natürlich (laut Formel) eine geringere > Rise-Time. Würde ein geringerer Pull-Up (in deinem Fall 2k2) also auch > bei mir ausreichen ? Meine H-Brücke (geht aus dem Text nicht hervor, nur aus der Software), arbeitet auch nur mit 240 Hz. Das ist für die Motoren, mit denen ich es hier zu tun habe, gerade richtig und spart einen Menge Energie. Bei solche niedrigen PWM Frequenzen werden auch die Ausgangstreiber des Tiny noch nicht über Gebühr belastet, zumal die IRLZ44 auch recht geringe Gateladungen benötigen. Bei höheren Frequenzen sind sicher kräftige Treiber und/oder Gatevorwiderstände sinnvoll. Mein LED Dimmer mit Tiny und IRLZ44 in der Lowside z.B. benutzt einen 100 Ohm Rg und arbeitet bei 4kHz. Sascha schrieb: > Der Unterschied liegt in der Ansteuerung, die beiden oberen Mosfets > bleiben angeschaltet und nur die beiden unteren bekommen PWM. Nö, das geht in einer H-Brücke sowieso nicht - da ist das Shoot-Through vorprogrammiert. Amateur schrieb: > Deine Schaltung arbeitet ja nach dem Ent-oder-Weder-Prinzip. > Berücksichtigt also nicht die Zeit, die z.B. die "oberen" FETs zum > Abschalten brauchen, während die "unteren" FETS zum Einschalten > überredet werden... So isses. Deswegen ja mein Vorschlag, die diagonal gegenüberliegenden Fet gleichzeitig anzusteuern, dann gibts da keine Probleme. Selbst wenn der eine dann später als der andere reagiert, ist es wurscht, der Strom fliesst jedenfalls immer über den Motor und nicht durch eine Halbbrücke. Man muss dabei nur noch drauf achten, das nicht beide PWM (Vor- und Rückwärts) gleichzeitig an sind, aber das ist in der Software ja ein Spaziergang.
Matthias S. schrieb: > max schrieb: >> Die Widerstände an >> den Gatetreibern sind auch einfache Pull Ups richtig? Aber das wäre doch >> genau die Bauart welche von @Sascha reklamiert wurde. Durch den >> geringeren Widerstand hast du natürlich (laut Formel) eine geringere >> Rise-Time. Würde ein geringerer Pull-Up (in deinem Fall 2k2) also auch >> bei mir ausreichen ? > > Meine H-Brücke (geht aus dem Text nicht hervor, nur aus der Software), > arbeitet auch nur mit 240 Hz. Das ist für die Motoren, mit denen ich es > hier zu tun habe, gerade richtig und spart einen Menge Energie. Bei > solche niedrigen PWM Frequenzen werden auch die Ausgangstreiber des Tiny > noch nicht über Gebühr belastet, zumal die IRLZ44 auch recht geringe > Gateladungen benötigen. > Bei höheren Frequenzen sind sicher kräftige Treiber und/oder > Gatevorwiderstände sinnvoll. Mein LED Dimmer mit Tiny und IRLZ44 in der > Lowside z.B. benutzt einen 100 Ohm Rg und arbeitet bei 4kHz. > > Sascha schrieb: >> Der Unterschied liegt in der Ansteuerung, die beiden oberen Mosfets >> bleiben angeschaltet und nur die beiden unteren bekommen PWM. > > Nö, das geht in einer H-Brücke sowieso nicht - da ist das Shoot-Through > vorprogrammiert. > Witzbold, natürlich nicht die direkt übereinanderliegenden FETs. Nehmen wir mal Pin 6 mit Q2 und Q3. Wenn da ne PWM anliegt, schaltet Q2 tatsächlich mit 240Hz an und aus. Der wird also mit PWM betrieben. Q3 hängt an einem 2k2 Pull Up Widerstand. Der kann zügig eingeschaltet werden, das Ausschalten hängt allerdings davon ab wie stark der NPN gesättigt ist und wie lang der Pull-Up braucht um die Kapazitäten zu laden. Ergo ist Q3 deutlich länger eingeschaltet als Q2 und ab einer gewissen PWM Frequenz ist er immer an. Strombestimmendes Bauteil für die H-Brücke wird dadurch nur noch Q2 sein.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.