Happy new year everyone! :-)
I am still interested in expanding the supported platforms and so I have
added GD32VF103 for RISC-V a couple of days ago.
I have not tested it though (yet), as that would require me to solder
jumper wires to my Longan Nano.
Since the GD21VF103 is "just" a GD32F103 with a RISC-C core, basic
support for STM32 should be almost implemented now as well.
Well, apart from DMA that is.
If you would like to see other controllers added, tell me which.
And if you already have implemented the support code for a different
controller, please post it.
And to keep things interesting, Bridgetek and FTDI posted news in
november that they will be showing BT817 at Embedded World in february.
I have no solid idea so far what they are up to, but I will stay on top
of it and add whatever new registers, defines and/or functions the BT817
may require to unlock its added functionality.
Hallo Rudolph,
erstmal vielen Dank für die Bibliothek, die Arbeit die du da rein
steckst und den Support den du hier gibst.
Ich habe den FT800 mit einem 4,3" Resistiven Touchdisplay an ein STM32
Chip angeschlossen. Die Kommunikation mit dem FT800 funktioniert und ich
kann auch Elemente auf dem Display anzeigen.
Nun habe ich folgendes Problem:
Im ersten Schritt habe ich das Beispielprojekt von GitHub genommen und
den Teil zur Kalibrierung im tft.c File aktiviert. Die Werte werden mir
angezeigt und ich habe sie in einen eigenen define-Block übernommen.
Danach habe ich mit dem unteren Programmteil eine neue Displayliste
erzeugt und mir einen Button anzeigen zu lassen.
Das alles geschieht vor dem while(1)-Block in der main-Routine.
Im while(1)-Block polle ich das REG_TOUCH_TAG-Register und gebe das
Touch-Tag mit Hilfe von UART über Putty aus.
Beim Berühren des Buttons auf dem Display wird aber weiterhin eine 0
ausgegeben bzw. wenn ich wahrlos auf dem Display neben dem Button drücke
erscheint manchmal die erwartete 5 manchmal die 0.
Ich hab dann wieder die Kalibrierung durchgeführt und siehe da, es
kommen andere Werte heraus.
Jetzt ist die Frage, ob man eine Kalibrierung jedes mal beim Start
ausführen muss und die Kalibrierungsdaten ändern sich oder ob ich
einfach ein Montagsprodukt erwischt habe und meine Toucheinheit einen
Schuss weg hat.
Danke schonmal im Vorraus!
Gruß
Moritz
Hallo,
ich will nicht ausschliessen, dass ich gerade was kaputt gemacht habe,
ich muss mir das noch genauer ansehen.
Aber benutzt mal einen anderen TAG Wert ab 10 aufwärts, da drunter ist
das bei mir gerade nicht so richtig stabil.
Bei 5 schwankt der Wert komischerweise die ganze Zeit zwischen 4 und 5.
Bei 9 zwischen 8 und 9.
Bei 1 zwischen 0 und 1.
2, 3, 4, 6, 7, 8, 11, 15 und 19 funktionieren - was auch immer da los
ist.
Zumindest stelle ich das gerade mit meinem EVE3-43G fest, wobei ich mir
die Werte anzeigen lasse.
Meine FT800 Displays bekomme ich spontan nicht reaktiviert, die sind
schon länger nicht mehr so wirklich interessant. :-)
Das TAG_MASK habe ich auch noch nie vewendet, das bewirkt so auch nichts
da "1" sowieso der Default Wert ist.
Ich setze einfach ein TAG(0) für kein Touch, obwohl ohne einen Tag Wert
zu setzen erstmal 255 geliefert wird.
Aber wenn kein Touch erkannt wird ist der Wert eben auch Null.
M. B. schrieb:> Ich habe den FT800 mit einem 4,3" Resistiven Touchdisplay
Welches?
> an ein STM32 Chip angeschlossen.
Welchen und magst Du mal den Code dafür posten?
Was die Kalibrierung angeht, die mache ich in der Regel für jedes
Display nur einmal und bisher passt es meistens sogar für verschiedene
Displays vom gleichen Typ.
Wichtig ist allerdings, dass man die Kalibrierung präzise ausführt.
Bei resistiv geht das ja mit irgeneinem feinen aber stumpfen Gegenstand.
Für meine kapazitiven Displays habe ich mir extra Eingabestifte gekauft
um die Punkte besser treffen zu können.
Und beim Spielen mit dem Stift auf dem Button habe ich gerade
festgestellt, dass meine aktuellen Kalibrierwerte einen leichten Versatz
nach Rechts haben, die Werte sind okay, das geht aber noch besser.
> Aber benutzt mal einen anderen TAG Wert ab 10 aufwärts, da drunter ist> das bei mir gerade nicht so richtig stabil.> Bei 5 schwankt der Wert komischerweise die ganze Zeit zwischen 4 und 5.> Bei 9 zwischen 8 und 9.> Bei 1 zwischen 0 und 1.> 2, 3, 4, 6, 7, 8, 11, 15 und 19 funktionieren - was auch immer da los> ist.
Ok implementiert und keine Besserung immernoch wird nur der Wert 0
ausgegeben
> M. B. schrieb:>> Ich habe den FT800 mit einem 4,3" Resistiven Touchdisplay>> Welches?
ConnectEVE der Firma mikroE. Display ist schwer herauszufinden ich habe
vorne noch einen Schriftzug mit RXA-043005 das ist allerdings nur die
Bezeichnung vom Touchpanel. Zum TFT habe ich gar nichts gefunden.
>> an ein STM32 Chip angeschlossen.>> Welchen und magst Du mal den Code dafür posten?
STM32F407VG
Das ist die main() ohne Initialisierung der ganzen Schnittstellen welche
automatisch generiert werden
> Was die Kalibrierung angeht, die mache ich in der Regel für jedes> Display nur einmal und bisher passt es meistens sogar für verschiedene> Displays vom gleichen Typ.> Wichtig ist allerdings, dass man die Kalibrierung präzise ausführt.> Bei resistiv geht das ja mit irgeneinem feinen aber stumpfen Gegenstand.> Für meine kapazitiven Displays habe ich mir extra Eingabestifte gekauft> um die Punkte besser treffen zu können.>> Und beim Spielen mit dem Stift auf dem Button habe ich gerade> festgestellt, dass meine aktuellen Kalibrierwerte einen leichten Versatz> nach Rechts haben, die Werte sind okay, das geht aber noch besser.
Ja ein bisschen nach rechts oder links finde ich in Ordnung allerdings
weichen die Werte schon sehr stark ab.
z.B.:
1
1.Durchlauf 2.Durchlauf 3.Durchlauf
2
3
TOUCH_TRANSFORM_A: 98982 UL 33658 UL 33536 UL
4
TOUCH_TRANSFORM_B: 158 UL 65690 UL 4294966582 UL
5
TOUCH_TRANSFORM_C: 4293468776 UL 4276760870 UL 4294069736 UL
6
TOUCH_TRANSFORM_D: 4294966920 UL 4294966974 UL 4294966694 UL
7
TOUCH_TRANSFORM_E: 20348 UL 20404 UL 86052 UL
8
TOUCH_TRANSFORM_F: 4293312168 UL 4293521822 UL 4276733650 UL
Daher die Überlegung dass das Panel nicht ganz in Ordnung ist.
M. B. schrieb:>> Aber benutzt mal einen anderen TAG Wert ab 10 aufwärts, da drunter ist>> das bei mir gerade nicht so richtig stabil.>> Ok implementiert und keine Besserung immernoch wird nur der Wert 0> ausgegeben
Seltsam.
> ConnectEVE der Firma mikroE. Display ist schwer herauszufinden ich habe> vorne noch einen Schriftzug mit RXA-043005 das ist allerdings nur die> Bezeichnung vom Touchpanel. Zum TFT habe ich gar nichts gefunden.
Das ist schon etwas schwer angestaubt soweit. :-)
Ich hoffe das hast Du nicht gerade erst zu dem auf Mouser immer noch
angezeigtem Kurs von 62 Euro gekauft.
Es gibt Beispielcode von MikroElektronika und da sind die Parameter
drin, das habe ich gerade mal verglichen und ein Profil dafür
hinzugefügt.
Die Parameter sind fast die gleichen wie bei den anderen 4.3" Displays.
Seltsamerweise weichen die Werte für VCYCLE and HCYCLE ab.
Das einzubauen und dafür zu compilieren hat auf jeden Fall noch einen
Bug in EVE_get_touch_tag() aufgedeckt - die FT80x haben ja nur ein
TOUCH_TAG Register...
> STM32F407VG
Ah okay, das ist schon eine ordentlich fixe Kachel. :-)
> touch_tag=EVE_memRead8(REG_TOUCH_TAG);> //if (touch_tag>0){> if(touch_tag>9){> touch_tag_uart[1]=(touch_tag%10)+48; //zehner Stelle als ASCII> touch_tag_uart[0]=(touch_tag/10)+48; //einer Stelle als ASCII> } else {> touch_tag_uart[0]=32; // ASCII Space> touch_tag_uart[1]=touch_tag+48;> }> HAL_UART_Transmit_IT(&huart2, touch_tag_uart, 4);> while(HAL_UART_GetState(&huart2)!=HAL_UART_STATE_READY);> touch_tag=0;
Auf den ersten Blick finde ich da nichts.
Du könntest mal REG_TOUCH_SCREEN_XY lesen und per sprintf() in einen
String werfen, am besten als Hex-Wert.
M. B. schrieb:> Das ist der Teil aus der target.h
...
Danke, ich schaue mal das ich das einbaue.
Wie sehen die Defines für EVE_PDN und EVE_CS und EVE_SPI aus?
Und die Includes passen nicht so richtig, EVE_config.h sollte nicht
gebraucht werden und die main.c sollte eher die EVE_target.h inkludieren
anstatt anders herum.
Statt dessen sollte da eher nur #include "stm32f4xx.h" stehen.
Die HAL Funktionen dürften das ganze übrigens nicht nur aufblähen, die
sind auch verhältnismäßig langsam.
Die haben das gleiche Problem wie z.B. digitalWrite() beim Arduino,
überflüssigerweise wird zur Laufzeit ermittelt was man eigentlich tun
will.
Immer und immer wieder.
Zusätzlich fängt man sich mit dem Funktionsaufruf auch noch eigentlich
überflüssige Stack-Zugriffe ein, was noch mehr Zeit kostet.
Daher benutzen meine AVR und ATSAM Funktionen direkte Register-Zugriffe.
Alleine den Funkions-Aufruf zu vermeiden macht das messbar schneller.
In den spi_transmit Funktionen LL_SPI_ReceiveData8(EVE_SPI); aufzurufen
macht das ganze dann noch mal extra langsam.
> Ja ein bisschen nach rechts oder links finde ich in Ordnung allerdings> weichen die Werte schon sehr stark ab.>> z.B.: 1.Durchlauf 2.Durchlauf> 3.Durchlauf>> TOUCH_TRANSFORM_A: 98982 UL 33658 UL 33536 UL> TOUCH_TRANSFORM_B: 158 UL 65690 UL 4294966582 UL> TOUCH_TRANSFORM_C: 4293468776 UL 4276760870 UL 4294069736 UL> TOUCH_TRANSFORM_D: 4294966920 UL 4294966974 UL 4294966694 UL> TOUCH_TRANSFORM_E: 20348 UL 20404 UL 86052 UL> TOUCH_TRANSFORM_F: 4293312168 UL 4293521822 UL 4276733650 UL
Och, die Werte weichen bei mir auch immer mehr oder weniger stark ab,
egal wie oft ich das neu kalibriere.
Richtig erklären kann ich das auch nicht, das liegt erstmal auch daran
wie diese Werte verwendet werden.
Du kannst Dir ja mal die Funktion EVE_calibrate_manual() ansehen.
Da sieht man wie sich die Werte ergeben.
Da das aber auch nur bestenfalls die Hälfte des Puzzles ist, habe ich
mich lieber was anderem gewidmet als bis ins Detail zu verstehen wie das
funktioniert. :-)
Ich kann das nicht bauen, ich habe mir jetzt nur mal angesehen was im
STM32F407 Referenz-Manual so steht und was der STM32F4xx_HAL_Driver so
treibt.
Und natürlich sind die Defines für die Ports und die Pins frei erfunden.
:-)
Edit: okay, die Optimierung für den PowerDown Pin ist eher überflüssig,
das wird ja kaum mal verwendet.
Edit2: das Define für DELAY_MS war falsch..
Rudolph R. schrieb:> Und die Includes passen nicht so richtig, EVE_config.h sollte nicht> gebraucht werden und die main.c sollte eher die EVE_target.h inkludieren> anstatt anders herum.> Statt dessen sollte da eher nur #include "stm32f4xx.h" stehen.
Ich benutze die CubeMX Oberfläche um den Chip zu initialisieren. Die
kreiert defines in der main.h. Diese defines habe ich in der config.h
umdefiniert damit man nur an die config.h und nicht immer wieder an die
target.h heranmuss.
Rudolph R. schrieb:> Ich habs mal eingebaut und dabei beschleunigt:
Ich hab einen neuen pull gemacht und es sind noch ein paar Probleme
aufgetaucht.
Rudolph R. schrieb:
1
staticinlinevoidspi_transmit(uint8_tbyte)
2
{
3
EVE_SPI->DR=byte;
4
while((EVE_SPI->SR&SPI_SR_TXE)==0);
5
}
6
7
staticinlinevoidspi_transmit_async(uint8_tbyte)
8
{
9
#if EVE_DMA
10
EVE_dma_buffer[EVE_dma_buffer_index++]=data;
11
#else
12
EVE_SPI->DR=byte;
13
while((EVE_SPI->SR&SPI_SR_TXE)==0);
14
#endif
15
}
16
17
staticinlineuint8_tspi_receive(uint8_tbyte)
18
{
19
EVE_SPI->DR=byte;
20
while((EVE_SPI->SR&SPI_SR_TXE)==0);
21
while((EVE_SPI->SR&SPI_SR_RXE)==0);/* does most likely
22
nothing */
23
returnEVE_SPI->DR;
24
}
Soweit ich das verstanden habe wird der Indikator SPI_SR_TXE gesetzt,
wenn das Byte aus SPI*_DR erfolgreich in den Transmit Buffer geschrieben
wurde. Deshalb hatte ich das vor dem Schreiben in das SPI*_DR Register
abgefragt. Ich habe es mal mit beiden Versionen versucht also vor und
nach dem Schreiben in das DR-Register. Ich konnte jetzt keinen
Unterschied feststellen.
Der zweite Indikator heißt SPI_SR_RXNE.
Das zweite Problem entstand in der EVE_commands.h. Ich weiß nicht wie es
bei anderen MCUs ist allerdings musste ich für den STM32F4 zusätzlich
inttypes.h einbinden.
Nach diesen Änderungen, konnte ich die Bibliothek kompilieren. Trotzdem
läuft es nicht und ich bekomme bei einem Read keine anständigen Werte
zurück. Nach meiner Vermutung liegt das daran dass der Chip zu schnell
für den FT800 ist. Durch Delays konnte ich das Display kurzzeitig zum
Laufen kriegen. Nach einer Kalibrierung funktionierte es aber wieder
nicht. Mit den LL-Bibliotheken funktioniert es weiterhin.
Rudolph R. schrieb:> In den spi_transmit Funktionen LL_SPI_ReceiveData8(EVE_SPI); aufzurufen> macht das ganze dann noch mal extra langsam
Meinst du damit den Aufruf von mehreren Funktionen? Im Grunde macht die
Funktion ja nichts anderes als den Register auszugeben bzw beim Transmit
das Register mit einem Pointer zu verbinden und mit dem dann die Daten
über den Pointer in das Register zu schreiben. Bringt das soviel
Overhead?
M. B. schrieb:> Rudolph R. schrieb:>> Und die Includes passen nicht so richtig, EVE_config.h sollte nicht>> gebraucht werden und die main.c sollte eher die EVE_target.h inkludieren>> anstatt anders herum.>> Statt dessen sollte da eher nur #include "stm32f4xx.h" stehen.>> Ich benutze die CubeMX Oberfläche um den Chip zu initialisieren. Die> kreiert defines in der main.h. Diese defines habe ich in der config.h> umdefiniert damit man nur an die config.h und nicht immer wieder an die> target.h heranmuss.
Wenn Du Dir mal mein (veraltetes, okay) Beispiel ansiehst, da gibt es
noch eine "tft.c" und eine "tft.h".
Da habe ich die High-Level Funktionen drin die von der main.c aus
aufgerufen werden, modular und so.
Die "tft.h" exportiert bei mir aktuell:
extern uint16_t num_profile_a, num_profile_b;
void TFT_init(void);
void TFT_touch(void);
void TFT_display(void);
Die beiden Zahlenwerte beschreibe ich in der Hauptschleife, dazu messe
ich mit einem Timer wie lange die TFT_touch() und die TFT_display()
jeweils zur Ausführung benötigen.
Die "tft.c" includiert:
#include "EVE.h"
#include "EVE_target.h"
#include "EVE_commands.h"
#include "tft_data.h"
Da nun die "EVE_target.h" wiederrum die Platform-spezifischen Includes
einfügt ist die tft.c als solche mit jeder Plattform benutzbar.
Packt man das alles in die main.c greift das natürlich soweit nicht, da
die main.c quasi zwindend Plattform-spezifisch ist.
Also klar, mach doch, aber das ist ein wenig anders gemeint. :-)
> Soweit ich das verstanden habe wird der Indikator SPI_SR_TXE gesetzt,> wenn das Byte aus SPI*_DR erfolgreich in den Transmit Buffer geschrieben> wurde. Deshalb hatte ich das vor dem Schreiben in das SPI*_DR Register> abgefragt. Ich habe es mal mit beiden Versionen versucht also vor und> nach dem Schreiben in das DR-Register. Ich konnte jetzt keinen> Unterschied feststellen.
Die einfachste Anwort ist erstmal, ich mache das überall so, für jede
Plattform, schreiben, dann warten das der Transfer durch ist.
Damit ist zum Beispiel sichergestellt, dass das Chip-Select nicht zu
früh wieder hoch gezogen wird und der SPI kann immer Daten annehmen.
Natürlich kann man das auch anderes herum machen und erstmal testen ob
der SPI bereit ist Daten anzunehmen, da ich das aber nirgendwo sonst
gemacht habe, ist es anders herum konsistenter.
> Der zweite Indikator heißt SPI_SR_RXNE.
Ups, das kommt davon wenn man das nicht compiliert.
Ich muss mal schauen ob ich irgendwoher ein STM32F407 Projekt bekomme
das ich mit PlatformIO bauen kann.
Im Datenblatt ist mir dann noch was aufgefallen, die reinen Schreiben
Funktionen sollten besser noch das RXNE Flag löschen.
Das ist vielleicht nicht ganz so fatal wie bei den ATSAM, aber wenn man
Lesen und Schreiben auf dem SPI aktiv hat gibt es sonst einen Überlauf.
1
static inline void spi_transmit(uint8_t byte)
2
{
3
EVE_SPI->DR = byte;
4
while((EVE_SPI->SR & SPI_SR_TXE) == 0);
5
(void) EVE_SPI->DR; /* dummy read-access to clear SPI_SR_RXNE */
(void) EVE_SPI->DR; /* dummy read-access to clear SPI_SR_RXNE */
16
#endif
17
}
18
19
static inline uint8_t spi_receive(uint8_t byte)
20
{
21
EVE_SPI->DR = byte;
22
while((EVE_SPI->SR & SPI_SR_TXE) == 0);
23
while((EVE_SPI->SR & SPI_SR_RXNE) == 0); /* does most likely nothing */
24
return EVE_SPI->DR;
25
}
> Das zweite Problem entstand in der EVE_commands.h. Ich weiß nicht wie es> bei anderen MCUs ist allerdings musste ich für den STM32F4 zusätzlich> inttypes.h einbinden.
Da die EVE_commands.c die EVE_target.h includiert wird damit implizit
oder explizit auch die stdint.h mit includiert.
Für AVR, ATSAM, RISC-V und auch STM32 passiert das automatisch über die
System-Includes.
#include "stm32f4xx.h" -> #include "stm32f407xx.h" -> #include
<stdint.h>
> Trotzdem läuft es nicht und ich bekomme bei einem Read> keine anständigen Werte zurück.
Oh, vielleicht habe ich das gerade schon gefixt mit dem Löschen von RXNE
bei den Schreib-Funktionen.
> Nach meiner Vermutung liegt das daran dass der Chip zu schnell> für den FT800 ist.
Das sollte eigentlich so gut wie nicht passieren können.
> Durch Delays konnte ich das Display kurzzeitig zum> Laufen kriegen.
Delays an welcher Stelle?
Wie schnell hast Du den SPI laufen? Zumindest für das Init sollte das
unter 11MHz sein, dann unter 30MHz wobei die Hardware das auch mit
machen muss.
Wenn Du einen Logik-Analyzer hast, zieh doch mal einen Trace.
>> In den spi_transmit Funktionen LL_SPI_ReceiveData8(EVE_SPI); aufzurufen>> macht das ganze dann noch mal extra langsam>> Meinst du damit den Aufruf von mehreren Funktionen? Im Grunde macht die> Funktion ja nichts anderes als den Register auszugeben bzw beim Transmit> das Register mit einem Pointer zu verbinden und mit dem dann die Daten> über den Pointer in das Register zu schreiben. Bringt das soviel> Overhead?> __STATIC_INLINE uint8_t LL_SPI_ReceiveData8(SPI_TypeDef *SPIx)> {> return (uint8_t)(READ_REG(SPIx->DR));> }
In dem besonderen Fall macht es überhaupt keinen Unterschied,
da LL_SPI_ReceiveData8() als STATIC INLINE definiert ist, genau wie die
Funktionen in der EVE_target.h.
Das ergibt überhaupt keinen Overhead da kein Funktionsaufruf statt
findet.
Nett, das habe ich schon ganz anders gesehen.
Hilft halt echt wenn man das bauen und wirklich nachsehen kann, was da
so passiert. :-)
Damit wäre das hier mein Vorschlag:
Das HAL_GPIO_WritePin() braucht zwar ein paar Takte mehr, das fällt aber
nicht wirklich auf und im Gegenzug ist das auch gar nicht mehr
STM32F407, sondern STM32F4xx.
Für EVE_pdn_clear() / EVE_pdn_set() ist der Overhead irrelevant.
Für EVE_cs_set() / EVE_cs_clear() ist das auch nicht relevant, weil man
für eine große Display-Liste sowieso besser den Burst-Modus benutzt, ob
nun mit DMA oder nicht, damit hat man für den ganzen Datenblock nur noch
ein set/clear Paar und vor allem nur noch einmal am Anfang des Blocks
die Ziel-Adresse.
Und bei einzelnen Komandos merkt man die paar Takte Overhead sowieso
nicht.
Okay, ich habe ein neues PlatformIO Projekt erstellt.
Als Board habe ich einfach eine Drucker-Platine mit STM32F407
ausgewählt.
--------------------------------------------------------------
Das ist nicht funktional und dient nur als Test ob das baut!
This does not work, the purpose is to see if it compiles!
--------------------------------------------------------------
Da wird nichts initialisiert, weder der Controller, noch die IOs oder
der SPI.
Und die while(1) dreht einfach frei, die TFT_display() darf nur so alle
20ms aufgerufen werden.
Nothing gets initialised, not the Core, or the IOs or the SPI.
And TFT_display() has to be called once every 20ms or more.
Ich musste die EVE_target.h jetzt doch noch ein wenig erweitern.
Ich dachte ja eigentlich, dass die HAL gleich mit includiert wird,
das war aber nichts.
1
#if defined (STM32F4)
2
3
#include "stm32f4xx.h"
4
#include "stm32f4xx_hal.h"
5
#include "stm32f4xx_ll_spi.h"
6
...
Edit, ich habe gerade noch aus dem STM32F407xx ein STM32F4 gemacht, das
müsste soweit für die ganze Familie gelten.
Edit2: jetzt wüsste ich gerne noch, wie man Anhänge löscht :-)
Rudolph R. schrieb:> Da die EVE_commands.c die EVE_target.h includiert wird damit implizit> oder explizit auch die stdint.h mit includiert.> Für AVR, ATSAM, RISC-V und auch STM32 passiert das automatisch über die> System-Includes.> #include "stm32f4xx.h" -> #include "stm32f407xx.h" -> #include> <stdint.h>
Das Problem entsteht auch nicht in der EVE_commands.c sondern
EVE_commands.h. die EVE_commands.c ist soweit glücklich und hat alles
Rudolph R. schrieb:> Delays an welcher Stelle?> Wie schnell hast Du den SPI laufen? Zumindest für das Init sollte das> unter 11MHz sein, dann unter 30MHz wobei die Hardware das auch mit> machen muss.
Am Anfang um die 6 MHz danach würde ich gerne auf 21 MHz es funktioniert
aber nur bis 10,5 MHz
Gegenvorschlag =). Das Problem liegt tatsächlich an dem RXNE Flag. Man
muss mit dem Read allerdings warten bis das Flag geworfen wird. Der Chip
rennt an dieser Stelle schneller als der SPI_Bus dementsprechend muss
auf das
Flag gewartet werden.
M. B. schrieb:> Das Problem entsteht auch nicht in der EVE_commands.c sondern> EVE_commands.h. die EVE_commands.c ist soweit glücklich und hat alles
Ah okay, dagegen habe ich in EVE_target.c und tft.c erst das
EVE_target.h und dann EVE_commands.h.
Intuitiver ist aber vielleicht ein #include "EVE_target.h"
direkt in die EVE_commands.h zu packen.
M. B. schrieb:> Gegenvorschlag =). Das Problem liegt tatsächlich an dem RXNE Flag. Man> muss mit dem Read allerdings warten bis das Flag geworfen wird. Der Chip> rennt an dieser Stelle schneller als der SPI_Bus dementsprechend muss> auf das Flag gewartet werden.
Ich habs eingebaut, danke.
Die SPI Unit von zumindest dem STM32F4 ist schon ein wenig seltsam.
Alternativ bliebe noch das Busy-Flag abzufragen.
Das Kapitel 28.3.7 vom Referenz-Manual ist da aber etwas komisch.
Es gibt weder ein BDM noch ein BDOE Bit.
Das dürften BIDIMODE und BIDOE sein so vom Kontext her.
Mit MSTR = 1, BIDIMODE = 0 und BIDOE = 1 sollte das passen.
Aber dann kommt der nächste Satz:
"It is cleared:
• when a transfer is finished (except in master mode if the
communication is continuous)"
Was soll das denn bitte heissen?
Unter welchen Umständen ist der SPI Transfer kontinuierlich?
Wenn man DMA benutzt?
Falls das so ist, warum sollte man mit den Status Bits rumspielen wenn
gerade ein DMA Transfer läuft?
Edit:
>Am Anfang um die 6 MHz danach würde ich gerne auf 21 MHz es funktioniert>aber nur bis 10,5 MHz
Das ist vor allem auch eine Frage der Hardware.
Mit meinen aktuellen ATSAMC21 Platinen kann ich 12MHz ohne
Einschränkungen verwenden, also nach dem Init.
Wenn ich auf 24MHz hoch stelle funktioniert allerdings der Touch nicht
mehr, also irgendwie läuft das mit MISO nicht rund.
Hallo Rudolf,
Erstmal Danke für deine erstklassiger Bibliothek, sie hat mir viel Zeit
erspart.
Ich arbeite gerade bei einem Projekt in medizinische Bereich, dabei
werden verschiedene Figuren und Texte teilweise animiert dargestellt,
soweit funktioniert alles glücklicherweise wie gedacht.
Verwendet wird bei meinem Projekt ein 7" FT813 Display von Riverdi, und
jetzt kommt mein problem: da die Pixels des displays nicht perfekt
quadratisch sind die runde Formen wie Punkte und Kreisel werden leicht
oval dargestellt.
Soweit habe keine Möglichkeit gefunden dies in Software zu kompensieren.
Grundsätzlich müstte glaube ich ein Faktor von abs(sin(0,93 * PI) von
Radius des Zirkels extrahieren sodass in verschiedene Richtungen dies
unterschiedliche Länge hat. Also wie EVE_cmd_dl(POINT_SIZE (x - faktor)
* 16).
Leider funktioniert das nicht wie erwartet, mir bleibt es immerhin oval.
Bei FTDI gibt auch keine weitere details über Primitives.
Sorry für meine Sprache, bin keiner nativen Deutschsprecher.
PS mit einem Display von Glyn funktioniert alles super, nur sind die
vielmehr teurerer...
Puh, ich muss zugeben, dass mir das bisher nicht mal aufgefallen ist,
die Abweichung ist ja auch eher dezent.
Und ich benutze eher nur kleine Kreise.
Medizin ist ja mal interessant.
Wird das tatsächlich ein Produkt?
Welcher MikroController kommt da zum Einsatz?
Meine erste Idee war jetzt mal bei Matrix Orbital zu schauen, aber dem
Datenblatt nach hat deren 7" Panel ein Pixel-Pitch von 0.1923*0.1784 und
ist damit minimal "schlechter" als das Panel von Riverdi.
Wobei jetzt noch interessant gewesen wäre, welches Display das von
Riverdi genau ist, ich habe mir jetzt nur das Datenblatt von den
RVT70UQFNWC0x angesehen.
Die dritte Adresse für FT813 Displays wäre Newhaven, sowas wie das hier:
https://www.newhavendisplay.com/nhd70800480ftctxlctp-p-9579.html
Da finde ich aber gerade gar keine Angabe im Datenblatt zum Pixel-Pitch,
dazu müsstest Du denen mal eine Support-Anfrage einstellen.
Die haben auch mechanisch eine etwas andere Schnittstelle.
Direkt manipulieren kann man die "Primitives" nicht, die landen im
Gegensatz zu den "Widgets" direkt so in der Display-Liste.
Und sowas wie CMD_SCALE wirkt sich nur auf Bilder aus, nicht etwa auf
POINTS.
Eine Alternative zu einem anderen Display wäre noch auf POINTS ganz zu
verzichten und das mit Bitmaps zu machen die vorab so verzerrt werden,
dass sich das mit der Anzeige dann wieder ausgleicht.
Wenn der FT813 damit in der Anwendung nicht mehr funktioniert, weil
einfach der Grafik-Speicher jetzt schon voll ist, schau Dir mal die
BT815 basierten Displays von Riverdi und Matrix Orbital an.
Die haben ein SPI-FLASH mit auf der Platine das von dem BT815
angesprochen wird, da kann man unter anderem Bilder rein packen die
direkt angezeigt werden können.
Beschrieben wird der SPI-FLASH am bequemsten mit einem USB-SPI Interface
was es ebenfalls von Riverdi oder Matrix Orbital gibt.
The 7 "HD screen also has that uniqueness relative to" careless pixels "
Rudolph has considered using a microSD reader in your library, it is
much more convenient to upload images on the GRAM of the FT81X screen,
without running out of memory or complicating the code.
By the way, have you managed to upload videos in avi format with audio
on the FT81x processor?
TFTLCDCyg schrieb:> Rudolph has considered using a microSD reader in your library, it is> much more convenient to upload images on the GRAM of the FT81X screen,> without running out of memory or complicating the code.
I have considered it and just switched to a bigger controller. :-)
More seriously this is just out of scope for my code.
Sure, combining mass storage with EVE could be beneficial but apart from
mayb e a helper function to transfer a memory buffer to EVE that is not
my job.
And this function already exists for every other architecture than AVR
in form of the code that reads from flash.
On ARM this can read from anywhere.
> By the way, have you managed to upload videos in avi format with audio> on the FT81x processor?
Others have, but I have not even tried this so far.
This is just not what I use the FT81x/BT81x for.
The project is a time controller associated with low power therapy laser
devices. It counts the various intervals needed for bacteria
desinfection in mouth and teeths using laser beams. It displays among
other information both progress circular sectors and various sounds
every 10, 30 or 60 seconds.
I designed this using an ESP32 as microcontroller, there will be a
wireless link between the laser device and the time controller but this
is not important here. The internal flash is big enough to store all the
necesarry pieces of code and images.
Yesterday came another display from Riverdi this one is the BT815
version, although the same LCD, so the ovalizing problem remains. We
bought it because of the "umlaut" problem of the FT8xx series, we need
the infos to be displayed in several languages.
So there is no easy way to fix the picture distortion, i think we will
choose the expensive better displays from Glyn.
While it is not really obvious for me when I look at the picture,
measuring height and width shows a clear deviation, yes.
When you already use BT815 for extended font support, why not use
pictures for the circles?
After all, these have 64MBit of FLASH installed and a few additional
bitmaps should be easily possible, even more so when using ASTC
compressed images directly from the external FLASH.
And does Glyn even offer a 7" with BT815?
I should have 60 or 90 different pictures for every display situation...
and that for more than 10 different circular elements. I should compute,
draw and store hundreds of bitmaps...
Such a circular sector widget has the following code:
[c]
FT8_cmd_dl(DL_BEGIN | FT8_LINES);
FT8_cmd_dl(DL_COLOR_RGB | RED);
FT8_cmd_dl(LINE_WIDTH(1 * 16));
int r1 = 77, r2 = 128;
for (int t1 = 0; t1 < 6; t1++)
{ // DRAWING 6 SEGMENTS 60 DEGREES AROUND MAIN CIRCLES
float t = (t1 / 3.00) * PI;
FT8_cmd_dl(VERTEX2F(x * 16 + (int)(r1 * sin(t)) * 16, y * 16 -
(int)(r1 * cos(t)) * 16));
FT8_cmd_dl(VERTEX2F(x * 16 + (int)(r2 * sin(t)) * 16, y * 16 -
(int)(r2 * cos(t)) * 16));
}
FT8_cmd_dl(LINE_WIDTH(7 * 16));
//FT8_cmd_dl(DL_COLOR_RGB | RED);
byte segments = (sec_2 / 10) * 10 + 10; // HALF WIDTH POSITIVE
OFFSET
for (int t1 = 0; t1 < segments; t1++)
{ // DRAWING 30 SEGMENTS BARGRAPH AROUND TIME COUNTER
float t = (t1 / 30.00) * PI + (0.5 / 30.00) * PI;
if (min_2 < min2_max || sec_2 < sec2_max) //PROPER DISPLAY OF THE
RED SEGMENTS
{
FT8_cmd_dl(VERTEX2F(x * 16 + (int)(r1 * sin(t)) * 16 +
(int)(abs(32 * cos(t))), y * 16 - (int)(r1 * cos(t)) * 16));
FT8_cmd_dl(VERTEX2F(x * 16 + (int)(r2 * sin(t)) * 16, y * 16 -
(int)(r2 * cos(t)) * 16));
}
}
[c/]
Glyn has sent us a custom board for test, but our old display is only 6
bit so the picture is not properly displayed. They said they could
produce them for us if enough pieces will be ordered.
Ioan Mihai Cozac schrieb:> I should have 60 or 90 different pictures for every display situation...> and that for more than 10 different circular elements. I should compute,> draw and store hundreds of bitmaps...
I see, that would be indeed a lot of additional work.
Ioan Mihai Cozac schrieb:> FT8_cmd_dl(DL_BEGIN | FT8_LINES);
Oh, so are using an older 3.x version.
I changed the FT8_ prefixes to EVE_ prefixes a long time ago.
While most of the changes have been for BT81x, there also have been a
number of additions and fixes for the older generations.
Hallo und viel Erfolg im neuen Jahr!
Hat schon mal jemand ein Display der Firma ACTRON mit C-Touch am FT813
betrieben? Lt. Datenblatt des Display hat er ein C-Touch-Controller
HY4635 mit der I2C-Adresse Hx38. Mit dem Ossci kontrolliere ich Data und
Takt der I2C-Schnittstelle. Und der FT813 spricht den HY4635 auch mit
dieser Adresse an, es kommt das ACK und dann nur noch ein nicht
vollständiges Byte - Schluss! Das Merkwürdigste ist dabei, dass die
Taktleitung dauerhaft auf Low liegt (müsste aber in Ruhe auf High
liegen). Gibt es noch irgend ein Register des FT813 (C-Touch-Register),
was vielleicht in diesem Fall noch entsprechend gesetzt werden muss?
Benutze ich das DEMO-Board mit FT813 und mit 5" Display (Bridgetek), so
funktioniert mit meiner selben Software natürlich alles. Ich setze
lediglich am Beginn einmal den REG_CTOUCH_MODE und REG_CTOUCH_EXTEND und
kann dann z.B. den Register REG_CTOUCH_TOUCH_XY auslesen und erhalte die
Koordinaten. Auf der I2C-Schnittstelle des Demo-Board sehe ich die
ordnungsgemäße Kommunikation mit dem Ossci. Hier ist die Takt-Leitung
auf High, wenn keine Kommunikation statt findet.
Hat jemand einen Tipp?????
Dazu ist gerade eine Diskussion im BRT Community Forum durch:
http://www.brtcommunity.com/index.php?topic=62.0
Und so wie es aussieht verkauft Actron Displays von Powertip,
das passt dann also praktisch genau auf den Thread.
Um welches Modell geht es denn konkret?
Die Kurzversion ist das man den Touch-Controller im FT813 minimal
patchen muss um den I2C Takt niedriger einzustellen.
Edit: was zum Geier meint Actron mit I³?
Das sind doch gar keine intelligenten Displays.
Edit2: ich würde das ja auch gerne ausprobieren, aber dazu müsste ich
dann erstmal eine Platine designen an die man so ein Display
anschliessen kann -> dann doch lieber nicht.
Hallo Rudi,
guter Tipp mit "minimaler Patch". I2C ist ja allgemein bekannt als
langsame Schnittstelle, max. 160khz (ca.). Das messe ich mal nach, was
der FT813 da macht (Geschwindigkeit)… Und wie könnte ich die
Geschwindigkeit dieser Schnittstelle am FT813 ändern ?????????????
Es geht konkret um das SH800480TO13-IHC09, aber das spielt keine Rolle,
glaube ich, da ich von ACTRON leichtsinniger Weise mal vor ein paar
Monaten schon 40 Stück verschiedener Baugrößen und Art (10x 4,3"; 10x7"
und je 10 mit Glas-Überstand und Glas-Abschließend) geordert hatte und
das Problem sowohl mit dem 4,3-, als auch mit dem 7-Zöller habe. Das
geniale an den ACTRON mit ACT I3 Anschlüssen ist, dass die damit genau
"mein" Problem gelöst haben: Es gibt so viele Displays und jedes hat
einen anderen Anschluss (das 40-50-polige Folienkabel). "Natürlich" sind
das keine intelligenten Displays, einfach nur Displays. Und dafür habe
ich mir nun Display-Treiber-PLatinen mit dem FT813 gebaut und kann dank
der ACT I3 verschiedene Display für verschiedene Anwendungen mit dem
einen Treiber realisieren - wenn ich denn das mit dem C-Touch noch
hinbekomme!!! Schlimmstenfalls spreche ich diese Schnittstelle am FT813
vorbei direkt mit meinem Prozessor an … Ich weiß, wie ich dich kenne
krämpeln sich jetzt bei dir alle Fußnägel hoch - von wegen
"Vergewaltigung" des FT8xx . Das ist wie mit "an dem Co-Prozessor"
vorbei selbst Buttons generieren.. Hatte dazu ja schon meinen "Rüffel"
von Dir bekommen!
Danke für den Link zum Thread. Schaue mich da jetzt mal um!
OK - Exakter geht es ja tatsächlich nicht! Habe ich also nicht allein
das Problem. Wie es aus der Diskussion hervorgeht, ist es tatsächlich
ein Geschwindigkeitsproblem und Hinweise zur Veränderung der
Taktgeschwindigkeit des FT813 sind dort auch zu finden. Na dann probiere
ich mal. Und in diesem Fall scheint mir die Bedienung dieser
Schnittstelle am FT vorbei direkt durch meinen Prozessor immer weniger
abwegig!!!
Bernd I. schrieb:> I2C ist ja allgemein bekannt als> langsame Schnittstelle, max. 160khz (ca.). Das messe ich mal nach, was> der FT813 da macht (Geschwindigkeit)…
I2C hat normalerweise 100kHz oder 400kHz und es gibt auch noch HighSpeed
Versionen mit 1MHz oder so.
Die FT81x/BT81x machen 400kHz und der HY4635 ist mit 100kHz glücklicher.
Bernd I. schrieb:> Und wie könnte ich die> Geschwindigkeit dieser Schnittstelle am FT813 ändern ?????????????
Den Wert 40 an Adresse 0x30b1ac schreiben.
Das gibt 58kHz und mit 20 bekommt man wohl so 98kHz.
Die Bilder sieht man in dem Forum meine ich nur wenn man da angemeldet
ist.
Die haben ein "code.png" angehängt.
Und da steht drin:
1
/* Hycon fix */
2
delay(50);
3
Gpu_Hal_Wr8(host, REG_CPURESET, 2);
4
Gpu_Hal_Wr8(host, 0x301b1ac, 40);
5
Gpu_Hal_Wr8(host, REG_CPURESET, 0);
Also EVE_memWrite8().
Und danach besser noch so eine Schleife wie in EVE_init():
1
timeout = 0;
2
while (0x00 != (EVE_memRead8(REG_CPURESET) & 0x03)) /* check if EVE is in working status */
3
{
4
DELAY_MS(1);
5
timeout++;
6
if(timeout > 50)
7
{
8
return 0;
9
}
10
}
Der Touch-Controller braucht nämlich ein wenig bis er wieder aus dem
Reset da ist.
Oder eben einfach nur ein delay(50) oder so.
Bernd I. schrieb:> Das> geniale an den ACTRON mit ACT I3 Anschlüssen ist, dass die damit genau> "mein" Problem gelöst haben: Es gibt so viele Displays und jedes hat> einen anderen Anschluss (das 40-50-polige Folienkabel).
Also im Grunde genommen das was Glyn auch mit dem "Familie Konzept"
macht.
Und solche Faxen mit den Display-Anschlüssen sind genau der Grund warum
ich lieber fertige Module verwende. :-)
Bernd I. schrieb:> Und dafür habe> ich mir nun Display-Treiber-PLatinen mit dem FT813 gebaut
Hat auch was, jetzt noch auf BT815 aufrüsten, einen Controller dazu und
einen 3,3V Regler. :-)
Nein im Ernst, niedliches Platinchen.
Die Displays haben einen Regler für die Beleuchtung integriert?
12V ist da schon etwas ungewöhnlich.
Bernd I. schrieb:> Schlimmstenfalls spreche ich diese Schnittstelle am FT813> vorbei direkt mit meinem Prozessor an … Ich weiß, wie ich dich kenne> krämpeln sich jetzt bei dir alle Fußnägel hoch - von wegen> "Vergewaltigung" des FT8xx .
Keine Ahnung was Du meinst. :-)
Es gibt genau für sowas den sogenannten "Host" Mode bei dem der
Controller im Ziel-System die I2C Kommunikation mit dem Touch-Controller
abwickelt und die Daten an den FT81x schickt damit dieser die auswertet.
Das ist sicherlich lästig und I2C gefällt mir so oder so nicht, aber
bevor man eben gar keinen Touch hat, weil EVE nicht mit dem
Touch-Controller spielen will...
Rudi schrieb:
Die Bilder sieht man in dem Forum meine ich nur wenn man da angemeldet
ist.
Die haben ein "code.png" angehängt.
Und da steht drin:
/* Hycon fix */
delay(50);
Gpu_Hal_Wr8(host, REG_CPURESET, 2);
Gpu_Hal_Wr8(host, 0x301b1ac, 40); ICH HOFFE, DAS IST EIN
SCHREIBFEHLER !
Gpu_Hal_Wr8(host, REG_CPURESET, 0);
Hallo Rudi,
ich traue mich nicht so recht, in den Bereich 30b1ac einen Wert zu
schreiben (die 40). Dieser Bereich ist im Datenblatt nirgendwo
benannt/beschrieben!
Der letzte Bereich endet bei 308FFF (der Command Buffer). Und ich hoffe,
das da oben ist ein Schreibfehler - eine Eins zu viel hinter der 30.
Denn der Herr "BRT Community" schreibt ja auch vom 30b1ac oder den
RAM_JBOOT + 1ac.
Über den RAM_JBOOT finde ich nichts !!! Soll ich also ??? :):) Und an
anderer Stelle schreibts Du selbst auch 30b1ac
Denn wenn man mal eben an eine falsche Stelle etwas schreibt, kann der
FTI danach auch hinüber sein!
Das mit den 12V für die Hintergrundbeleuchtung ist tatsächlich etwas
ungewöhnlich, bedeutet aber eben nur eine Ader zu meinem "Platinchen"
mehr. Der Regler ist auf dem Display, der kommt aber eben nicht mit 3,3V
aus, sondern braucht mind. 5V (max. 17V).
OK ich traue mich jetzt!
Ich habe mich getraut !!!
Nachdem sich die Rauchwolke verzogen hatte …
Nein - alles Super. I2C arbeitet jetzt auf 57kHz (gemessen) und der
Touch funktioniert! Auf alles andere hat diese Taktveränderung doch wohl
keinen Einfluss ???
Da meine "Platinchen" ja nun zu 100% so funktionieren, wie ich es mir
gedacht hatte, kann ich ja mal 100 Stück davon fertigen lassen (wir
machen bei uns im Haus, außer ein paar Muster keine SMD-Bestückung, nur
THT). Möchtest Du eine davon? Würde ich Dir schenken, als kleines
Dankeschön für die Hilfe!!!
Aber die sind eben nur für die ACTRON-Display's nützlich!
Schönen Sonntag noch.
Bernd I. schrieb:> Über den RAM_JBOOT finde ich nichts !!! Soll ich also ??? :):) Und an> anderer Stelle schreibts Du selbst auch 30b1ac
Ja, Tippfehler. :-)
RAM_JBOOT gibt es auch nirgendwo in den Unterlagen, das stammt sicher
aus internen Unterlagen von FTDI/Bridgetek.
Das ist der Bereich in dem der Code für den Touch-Controller liegt.
da kann man auch nichts kaputt machen, von der Architektur sehen die EVE
nämlich so aus, dass die ein ROM haben (oder vielleicht auch ein FLASH),
das beim Start in RAM kopiert wird, ein Shadow-RAM.
So funktionieren auch die FT9xx von FTDI.
Man kann den Speicher zwar nicht auslesen, aber beschreiben geht.
In AN_336 gibt es Binär-Blobs die an diese Stelle kopiert werden.
Das sieht man da nicht direkt, da der Blob in den Kommando Co-Processor
geschrieben und ausgeführt wird.
Wenn man das aber zerlegt, kommt man schnell dahinter das da im
wesentlichen ein CMD_INFLATE die Daten an 0x3b1ac entpackt.
Spannende Sache, die EVE sind also patchbar, viel weiter als das bin ich
aber noch nicht gekommen, da sich FTDI/BRT da sehr bedeckt hält.
Die haben intern sicherlich ein SDK dafür.
Was die in den Thread gepackt haben hat mich jetzt ein wenig überrascht.
Bernd I. schrieb:> Möchtest Du eine davon? Würde ich Dir schenken, als kleines> Dankeschön für die Hilfe!!!> Aber die sind eben nur für die ACTRON-Display's nützlich!
Ich würde eine nehmen, klar, ab in die Sammlung. :-)
Aber erstmal muss ich schauen ob ich ein Display dafür bekomme.
Actron sind aber nicht die einzigen die Displays von Powertip
vertreiben.
Dann 8 Fädeldrähte und es sollte laufen. :-)
Interessant, Powertip hat FT813 Displays im Sortiment von denen ich noch
nie gehört habe.
PH800480T024-IFC03 5"
PH800480T013-IFC05 7"
Leider kann ich dazu nichts finden, keine Datenblätter, kein
Distributor.
Rudolph R. schrieb:> Bernd I. schrieb:>> Möchtest Du eine davon? Würde ich Dir schenken, als kleines>> Dankeschön für die Hilfe!!!>> Aber die sind eben nur für die ACTRON-Display's nützlich!>> Ich würde eine nehmen, klar, ab in die Sammlung. :-)
Okay, ich habe intensiv gesucht und ich würde dann eher doch keines
nehmen, aber vielen Dank für das Angebot!
Dazu passen praktisch nur eine Handvoll Displays:
PH320240T023-IHC04 PH320240T023-IHC06
PH480272T009-IHC05 PH480272T009-IHC07
PH800480T024-IHC07 PH800480T024-IHC11
PH800480T013-IHC09 PH800480T013-IHC12
Und die bekomme ich zum einen allesamt nicht einfach so bestellt.
Dann fallen die ersten 4 mit 3,5" und 4,3" auch praktisch gleich raus.
Wenn man tatsächlich Produkte verkauft sieht die Sache sicher anders
aus, dann kann man da über die Mengen ganz anders heran gehen.
Da die Ganze Geschichte für mich aber eher ein Hobby ist, wenn auch mit
dem Benefit gelegentlich dienstlich Arbeit zu generieren, kaufe ich
Displays nur in niedrigen einstelligen Stückzahlen.
Ich habe gerade ein 5" EVE2-50G auf dem Tisch das als Einzelstück an
einen Kunden geht.
Und daneben liegt ein 4,3" EVE3-43G für das ich eine Demo-Software
vorbereite um Kollegen davon zu überzeugen die Neu-Auflage eines
Haus-internen Tools mit Display zu machen.
Davon brauche ich dann vielleicht mal >10 Stück.
Als nächstes werde ich dann wohl wieder ein 7" als Einzelstück in einen
Testplatz stecken dürfen.
Okay, ich habe praktisch den ganzen Spass ohne Probleme wie
Produktkosten wirklich berücksichtigen zu müssen. :-)
Also für mich lohnt sich das einfach nicht einzelne Displays mit eigenen
FT81x/BT81x Platinen zu verwenden
Found a pretty simple workaround for the ovalization, i draw 2 points
for every point needed, with the center vertically misaligned, about 6%
of the radius of points. Mathematically is not quite a perfect circle
but optically looks much better as before.
But i have some trouble with the newest version of your EVE, there is an
error that appears regarding the SPI library. It apperas regardless if i
use the FT813 or the BT815 display.
IDE is VS Code for Platform.io, microcontroller is ESP32 and the error
is like this:
Ioan Mihai C. schrieb:> Found a pretty simple workaround for the ovalization, i draw 2 points> for every point needed, with the center vertically misaligned, about 6%> of the radius of points. Mathematically is not quite a perfect circle> but optically looks much better as before.
Interesting, thank you for the suggestion.
Ioan Mihai C. schrieb:> But i have some trouble with the newest version of your EVE, there is an> error that appears regarding the SPI library.
This is a "feature" of Arduino that for "reasons" the classes are not
supposed to work with plain .c files.
It should work just fine if you rename "EVE_commands.c" to
"EVE_commands.cpp".
There might be a solution to fix that without renaming the file but I
have not found one yet and I am normally not reminded about this since I
am normally not using the Arduino framework.
Plus that renaming the file works kind of tells me that the issue is not
really on my side...
Hi Rudolph! A lot of thanks for your job. I still have very old lib, its
working with FT800 and FT810 well. I have RVT70UQFNWC00 from Riverdi and
a lot of problems with it. Pleas visit url link, there are schematic,
PCB, some C listing and movie. Could you give me an advice what I do
wrong? I mage another project with the same tft panel and its workinkg
well. Im getting crazy, I spent more then 2 days traing to fix it. Pleas
help.
Beitrag "FT800 / FT810 Library"
Hi Rudolph! A lot of thanks for your job. I still have very old lib, its
working with FT800 and FT810 well. I have RVT70UQFNWC00 from Riverdi and
a lot of problems with it. Pleas visit url link, there are schematic,
PCB, some C listing and movie. Could you give me an advice what I do
wrong? I mage another project with the same tft panel and its workinkg
well. Im getting crazy, I spent more then 2 days traing to fix it. Pleas
help.
Beitrag "FT800 / FT810 Library"https://www.elektroda.pl/rtvforum/viewtopic.php?p=18496421#18496421
Hello,
I can have a closer look when I am home again.
But please describe what the problem actually is.
I had to translate the website to Englisch and I am not sure if it got
lost in translation but there is no description of the issue.
Also, please attach the code here as well, I would need to login to that
other forum in order to see it.
And then, why not just switch to the latest version of my library?
Thanks for your answer.
There is a movie, didn't you saw it?
I have a lot of strange behavior of display. Its live on his own life,
changing all elements on screen also pressing touch without physical
finger touch.
1
voidft800_init(void)
2
{
3
uint8_tchipid;
4
uint16_ttimeout=0;
5
6
FT_PDN_DDR|=FT_PDN;
7
FT_CS_DDR|=FT_CS;
8
9
FT_PDN_PORT&=~FT_PDN;
10
DELAY_MS(6);// minimum time for power-down is 5ms
11
FT_PDN_PORT|=FT_PDN;
12
DELAY_MS(21);// minimum time to allow from rising PD_N to first access is 20ms
13
14
//ft800_cmdWrite(FT_CLKEXT); // Set FT800 for external clock
15
ft800_cmdWrite(FT_CLKINT);
16
ft800_cmdWrite(FT_CLK48M);// FT_CLK48M Set FT800 for 48MHz PLL
17
ft800_cmdWrite(FT_ACTIVE);// Start FT800
18
19
chipid=ft800_memRead8(REG_ID);// Read ID register
20
while(chipid!=0x7C)// if chipid is not 0x7c, continue to read it until it is, FT81x may need a moment for it's power on selftest
21
{
22
chipid=ft800_memRead8(REG_ID);
23
DELAY_MS(1);
24
timeout++;
25
if(timeout>400)
26
{
27
break;//return 0;
28
}
29
}
30
31
ft800_memWrite8(REG_PCLK,0x00);// Set PCLK to zero - don't clock the LCD until later
32
ft800_memWrite8(REG_PWM_DUTY,30);// Turn off backlight
33
34
// Initialize Display
35
ft800_memWrite16(REG_HSIZE,FT_HSIZE);// active display width
36
ft800_memWrite16(REG_HCYCLE,FT_HCYCLE);// total number of clocks per line, incl front/back porch
37
ft800_memWrite16(REG_HOFFSET,FT_HOFFSET);// start of active line
38
ft800_memWrite16(REG_HSYNC0,FT_HSYNC0);// start of horizontal sync pulse
39
ft800_memWrite16(REG_HSYNC1,FT_HSYNC1);// end of horizontal sync pulse
40
ft800_memWrite16(REG_VSIZE,FT_VSIZE);// active display height
41
ft800_memWrite16(REG_VCYCLE,FT_VCYCLE);// total number of lines per screen, incl pre/post
42
ft800_memWrite16(REG_VOFFSET,FT_VOFFSET);// start of active screen
43
ft800_memWrite16(REG_VSYNC0,FT_VSYNC0);// start of vertical sync pulse
44
ft800_memWrite16(REG_VSYNC1,FT_VSYNC1);// end of vertical sync pulse
45
ft800_memWrite8(REG_SWIZZLE,FT_SWIZZLE);// FT800 output to LCD - pin order
46
ft800_memWrite8(REG_PCLK_POL,FT_PCLKPOL);// LCD data is clocked in on this PCLK edge
47
ft800_memWrite8(REG_CSPREAD,FT_CSPREAD);/* helps with noise, when set to 1 fewer signals are changed simultaneously, reset-default: 1 */
48
// Don't set PCLK yet - wait for just after the first display list
49
50
ft800_memWrite8(REG_ROTATE,1);// rotate display by 180°
spi_transmit((uint8_t)(command));// Send data low byte
135
spi_transmit((uint8_t)(command>>8));
136
spi_transmit((uint8_t)(command>>16));
137
spi_transmit((uint8_t)(command>>24));// Send data high byte
138
ft800_inc_cmdoffset(4);// update the command-ram pointer
139
}
140
// virtually the same as ft800memWrite32() but calculating the address and offset as the other commands
141
voidft800_cmd_dl(uint32_tcommand)
142
{
143
ft800_start_cmd(command);
144
ft800_cs_clear();
145
}
146
//
147
voidpage_start(void)
148
{
149
ft800_cmd_dl(CMD_DLSTART);// Start the display list
150
ft800_cmd_dl(DL_CLEAR_RGB|GRAY_LIGHT2);// Set the default clear color
151
ft800_cmd_dl(DL_CLEAR|CLR_COL|CLR_STN|CLR_TAG);// Clear the screen - this and the previous prevent artifacts between lists, Attributes are the color, stencil and tag buffers
152
}
153
//
154
voidpage_stop(void)
155
{
156
ft800_cmd_dl(DL_DISPLAY);// Instruct the graphics processor to show the list
Karol B. schrieb:> There is a movie, didn't you saw it?
Yes, but apparently it played too small on the forum, I looked at it
again and yes, it glitches.
> I have a lot of strange behavior of display. Its live on his own life,> changing all elements on screen also pressing touch without physical> finger touch.
Have you checked your 3.3V?
This displays draws current of 130mA or more on the 3.3V line.
I can not tell from the pictures which of the two 3.3V regulators is
actually used for the display.
But, while I find no data for a LD117A, only LD1117A, the datasheet for
the LD1117 lists 10µF minimum capacatiy at the output and you only have
4.7µF.
And the APE8865-3 is designed to be stable with low ESR ceramic
capacitors with 30mR to 50mR but it looks like you placed a tantalum cap
there.
From what I can see in the video C12 at the display-connector also is a
tantalum type.
Unless these are ultra low ESR types that might be the problem.
Annother idea, it looks like the case is made of metall and the
anti-static bag under the display is a conductive one.
Please remove the display from the case and place it on a non-conductive
underground.
>F_CPU=11059200 (is it to slow?)
This should be no problem.
I have to check the software later, looks like I need to translate some
parts.
PCB has 2 options for 3.3V regulator (1117-33 or APE8865Y5) I use only
1117 series (spx1117m3-l-3-3). 1uF on input nad 100nF+4uF7 (tantalum) on
output.
I checked by powered up pcb from laboratory power suplyy, still the same
issue on display. That's weird but screen callibration or built in logo
are working fine.
I placeed display on a non-conductive underground.
I have the same program working on anbother PCB, there are only a little
changes:
- CS=PINB5, PD=PINB4
- ATMEGA128A@5V + 74125 for SPI level shift
As you can see on scheamtic, my connections on no-working PCB are:
CS=PINB4, PD=PINE6, ATmega128A@3.3V
Karol B. schrieb:> I use only 1117 series (spx1117m3-l-3-3). 1uF on input nad> 100nF+4uF7 (tantalum) on output.
So this is the one from Exar, what type exactly is the 4µ7 output
capacitor?
What is the exact modell number or where did you order it from?
Karol B. schrieb:> I checked by powered up pcb from laboratory power suplyy, still the same> issue on display.
But you supplied 5V?
> That's weird but screen callibration or built in logo are working fine.
These are really simple commands, there is not much going over the SPI
for these.
Karol B. schrieb:> I have the same program working on anbother PCB, there are only a little> changes:> - CS=PINB5, PD=PINB4> - ATMEGA128A@5V + 74125 for SPI level shift>> As you can see on scheamtic, my connections on no-working PCB are:> CS=PINB4, PD=PINE6, ATmega128A@3.3V
This should work just fine.
11MHz should be well within the allowable frequence for 3.3V.
The only issue I could think of would be that PB0 is not set to output.
>4µ7 output capacitor? =>
TAJA475K006R from www.tme.eu
>But you supplied 5V?
Both, 5V+3.3V (3.3 LDO was present but current flow thrue it was equal
or near 0mA)
I'm preaty sure now, the point is my pcb. The same program (only CS/PD
pin connection are diferent) work fine on another PCB, but there are
74xx125 level shifter.
Maybe the point is about SPI connection:
1) working fine => Atmega128@5V -> SPI thru 74LCX125MTC -> TFT
2) working bad => Atmega128@3.3V -> SPI direct to -> TFT
However, I saw on osciloscope shape of signals, they looks fine, I
think.
PS. From some time, I allways set PB0 (SS) as output.
By the way, if it is an output, can I change state (PORTB0) in
interrupt routine?
Karol B. schrieb:>>4µ7 output capacitor? =>> TAJA475K006R from www.tme.eu
Okay, this is the wrong capacitor for the job, the ESR is way too large.
Please replace it with a 4µ7 ceramic or put 2µ2+ in parallel to it.
>>But you supplied 5V?> Both, 5V+3.3V (3.3 LDO was present but current flow thrue it was equal> or near 0mA)
Hmm, okay.
> I'm preaty sure now, the point is my pcb. The same program (only CS/PD> pin connection are diferent) work fine on another PCB, but there are> 74xx125 level shifter.> Maybe the point is about SPI connection:> 1) working fine => Atmega128@5V -> SPI thru 74LCX125MTC -> TFT> 2) working bad => Atmega128@3.3V -> SPI direct to -> TFT> However, I saw on osciloscope shape of signals, they looks fine, I> think.
I recently had an issue with an ATSAMC21 running at 3.3V and driving the
SPI directly.
But that was because the ATSAMC21 is a lot weaker at driving the pins
than the Mega128.
Also I was running the SPI at more than double the speed.
You could try to patch in a buffer for MOSI and SCK, something like a
NC7WZ16P6X.
For MISO I am using a 74VHC1GT125 since I was hoping it would solve the
issue that the data gets corrupted when reading with 24MHz - and it did
not.
> PS. From some time, I allways set PB0 (SS) as output.
Excellent.
> By the way, if it is an output, can I change state (PORTB0) in> interrupt routine?
Sure, this should not interfere with anything.
MISO line:
https://obrazki.elektroda.pl/6391929500_1582828139.jpg
The same shape is present on PCB with 74xx125 buffer.
I have built several new tiles, this is the rule - it works with buffer,
and without buffer doesn't.
What's the matter? As you said, Atmega128 has enough Pin-current to
drive directly SPI interface. Also, speed isn't to fast (now I slow
down: SPCR |= (1<<SPR0| 1<<SPR1); @ F_CPU=11059200).
PS. I have tryed run new librarry. I changed SMAC21 project (create new
one with ATmega128, slect TFT, set PD,CS lines and still have blank
screen).
That on the MISO line is quite normal, if you plot CS with it this
should happen very shortly after CS goes high.
The line is just not driven anymore.
Karol B. schrieb:> As you said, Atmega128 has enough Pin-current to> drive directly SPI interface.
I can not find it in the datasheet right now but the M128-A should be
able to drive at least 10mA @ 3.3V while the C21 can drive at best 6mA
with two dedicated high-current pins while all the other pins can only
drive 3mA.
And the 6mA is not enough, I had to put a second pin-pair for SCK and
MOSI in parallel to make it work - which of course is no option with the
M128-A.
I will add a buffer to my design and that is hopefully the end of it.
And the worst part of that issue was that the display just crashed after
a few seconds for no apparent reason.
The voltage levels looked totally fine to me.
I had a small filter with 10R and 22pF and did quite some measurements,
nothing worked.
Then I just put two 741G125 buffers in the SCK and MISO lines and it
worked up to maximum speed.
Annother issue I had before that was with a board that had a slightly
unstable 3.3V.
It would flicker on startup and after a short time the touch-controller
crashed.
On a hunch I changed three caps on the board, I put an extra cap in
parallel to the ouput-cap of my stepdown, the switched the boost cap at
this stepdown in case I put on the wrong part and I put a second cap in
parallel at the input to the stepdown.
One of these, or two or all three together did the trick and that
display is rock solid now.
Anyways, I put together a small test version for the M128-A that might
be even working - it compiles fine but I can not test it.
The init_ports() function might need adjustment to play nice with your
board.
Oh yes, and the profiling values are completely wrong due to that
strange clock of 11.0592MHz.
Had this kind of self-tapping display error and found that the supply
voltage was not stable enough, sometimes the current draw spikes and it
leads to register corruption. Try with another power supply or use a
extra ground wire from display to module, this helps also minimizing the
audio noise if you use this function.
Hallo Rudolph,
auch von meiner Seite ein großes Dankeschön für deinen Treiber. Aktuell
bin ich dabei diesen für meine Zwecke anzupassen. Dieser Thread hat mir
bei einigen Problemen und Fragen zum BT-Chip weitergeholfen, allerdings
bin ich jetzt auf ein Problem gestoßen, zu dem ich weder hier noch sonst
wo etwas finden konnte.
Ich habe verschiedene Schriften konvertiert und auf den externen Flash
gespielt. Das funktionierte bisher auch wie gewünscht.
Jetzt benötige ich allerdings verschiedene Symbole. Dafür habe ich mir
die entsprechenden Schriften generiert, die diese Symbole beinhalten und
die Symbole über UTF-8 Kodierung ausgegeben. Das funktioniert allerdings
nur bis Codepage EF (Bsp.: E2 AF 85 zzgl. 0 zur Terminierung). Sobald
die Symbole nach UTF-8 mit vier Bytes kodiert werden müssen (Bsp.: F0 9F
A1 83 zzgl. 0 zur Terminierung), werden diese bei mir auf dem Display
nicht mehr dargestellt.
Für die Darstellung der Schrift bzw. der Symbole verwende ich die
EVE_cmd_text Funktion. Der Text wird allerdings nicht der Funktion
übergeben, sondern vorher in einen entsprechenden Text-Buffer
geschrieben. Diese Veränderung ist notwendig, um Abwärtskompaitbilität
zur Software des vorherigen Displays gewährleisten zu können.
Codebeispiel:
1
switch(direction)
2
3
{
4
case0://arrow up
5
{
6
7
arrow_x=x1+((x2-x1)/2)-20;
8
arrow_y=y1+((y2-y1)/2)-12;
9
10
EVE_cmd_setfont2(13,SPECIAL_FONT2_RAM_ADR,0);//special font
11
12
//Dieser Pfeil wird korrekt dargestellt
13
LCD_FuncData.text_buffer[0]=0xE2;
14
LCD_FuncData.text_buffer[1]=0xAF;
15
LCD_FuncData.text_buffer[2]=0x85;
16
LCD_FuncData.text_buffer[3]=0;
17
break;
18
}
19
case1://arrow down
20
{
21
arrow_x=x1+((x2-x1)/2)-20;
22
arrow_y=y1+((y2-y1)/2)-12;
23
24
EVE_cmd_setfont2(13,SPECIAL_FONT2_RAM_ADR,0);//special font
25
26
//Dieser Pfeil wird nicht angezeigt
27
LCD_FuncData.text_buffer[0]=0xF0;
28
LCD_FuncData.text_buffer[1]=0x9F;
29
LCD_FuncData.text_buffer[2]=0xA1;
30
LCD_FuncData.text_buffer[3]=0x83;
31
LCD_FuncData.text_buffer[4]=0;
32
break;
33
}
34
}
35
36
if(button_down)
37
{
38
EVE_cmd_button(x1,y1,x2-x1,y2-y1,13,EVE_OPT_FLAT);//hier wird die Beschriftung des Buttons über EVE_write_string aufgerufen und der Buffer-Inhalt an den BT816 übertragen
39
}
40
else
41
{
42
EVE_cmd_button(x1,y1,x2-x1,y2-y1,13,0);
43
}
Vielleicht hat hier ja jemand eine Idee warum dieses Problem aufritt.
Über einen Lösungsansatz würde ich mich freuen.
Grüße Simon
> von Ioan Mihai C:
I tried with another power supply with no effect. FPC between TFT module
and my PBC is 10cm long (sometimes even 20cm long) also with no
difference. I will try add some extra ground.
For now, I made 4 pcb extra with the same uC but also with 74x125 IC
buffer. Its look terrible but is working :)
>Rudolph,
THX for EVE_Test_M128_RVT70.zip, I will try in few days (I hope today,
I'm really cant wait for it :) )
Simon schrieb:> Ich habe verschiedene Schriften konvertiert und auf den externen Flash> gespielt. Das funktionierte bisher auch wie gewünscht.> Jetzt benötige ich allerdings verschiedene Symbole. Dafür habe ich mir> die entsprechenden Schriften generiert, die diese Symbole beinhalten und> die Symbole über UTF-8 Kodierung ausgegeben. Das funktioniert allerdings> nur bis Codepage EF (Bsp.: E2 AF 85 zzgl. 0 zur Terminierung). Sobald> die Symbole nach UTF-8 mit vier Bytes kodiert werden müssen (Bsp.: F0 9F> A1 83 zzgl. 0 zur Terminierung), werden diese bei mir auf dem Display> nicht mehr dargestellt.
Okay, interessant, so tief habe ich das noch nicht getestet.
Ich war ja schon froh, einfache Sonderzeichen benutzen zu können. :-)
Mein Font hatte auch nur so 242 Glyphen oder so.
Was Du mal ausprobieren kannst ist das Flash-Image in den EVE-Screen
Editor zu laden, bei der .glyph den Haken rein, dass die ins RAM geladen
wird, etwa gleich in Adresse Null.
Dann einfach nur noch das SETFONT2(13, 0, 0) dazu und
ein CMD_TEXT() in das Fenster ziehen mit eben dem Font.
Zumindest ein "µ" konnte ich problemlos benutzen, also Sonderzeichen
gehen schon mal grundsätzlich.
Was ist F0 9F A1 83 überhaupt? :-)
Simon schrieb:> {> EVE_cmd_button(x1,y1,x2-x1,y2-y1,13,EVE_OPT_FLAT); //hier> wird die Beschriftung des Buttons über EVE_write_string aufgerufen und> der Buffer-Inhalt an den BT816 übertragen> }Simon schrieb:> Für die Darstellung der Schrift bzw. der Symbole verwende ich die> EVE_cmd_text Funktion. Der Text wird allerdings nicht der Funktion> übergeben, sondern vorher in einen entsprechenden Text-Buffer> geschrieben. Diese Veränderung ist notwendig, um Abwärtskompaitbilität> zur Software des vorherigen Displays gewährleisten zu können.
Hmm, okay, warum nicht einfach den String übergeben?
In meinem aktuellen Projekt steht sowas drin:
Die Funktion EVE_cmd_text() will ja nur einen Pointer haben.
Und abgesehen von der Null für das Ende und das nach 249 Zeichen gekappt
wird ist der Funktion auch der Inhalt egal.
Karol B. schrieb:> FPC between TFT module> and my PBC is 10cm long (sometimes even 20cm long)
That might be the issue, I only use 5cm cables.
And maybe your layout, the display shares the SPI with the SD card
socket.
With the controller in die middle and running the SPI lines left and
right you may have an issue with reflections.
You could try and add small resistors in the lines, 10R perhaps.
But ultimately I would suggest switching to a controller that is a
little more advanced than the Mega128A.
Even a Mega1281 would be an upgrade since it has two SPI.
Rudolph R. schrieb:> Was ist F0 9F A1 83 überhaupt?
Das ist ein bestimmter Pfeil den ich gerne verwenden würde, also nicht
so extrem wichtig. Ich bin mir aber nicht sicher ob ich ggf. später noch
andere Symbole aus den entsprechenden Codepages benötige und versuche
deswegen das Problem schonmal vorab zu klären.
Rudolph R. schrieb:> Was Du mal ausprobieren kannst ist das Flash-Image in den EVE-Screen> Editor zu laden
Das habe ich probiert und es sieht tatsächlich so aus, als könne der
BT-Chip die 4-Byte codierten Pages nicht verarbeiten. Er hat alle
Zeichen/Symbole unter der 4-Byte Grenze, die ich probiert habe
problemlos angezeigt. Alles ab dieser Grenze wird nur noch mit zwei
Fragezeichen dargestellt. Auf meinem realen Display wird gar nichts
angezeigt.
Simon schrieb:> Rudolph R. schrieb:>> Was Du mal ausprobieren kannst ist das Flash-Image in den EVE-Screen>> Editor zu laden>> Das habe ich probiert und es sieht tatsächlich so aus, als könne der> BT-Chip die 4-Byte codierten Pages nicht verarbeiten. Er hat alle> Zeichen/Symbole unter der 4-Byte Grenze, die ich probiert habe> problemlos angezeigt. Alles ab dieser Grenze wird nur noch mit zwei> Fragezeichen dargestellt. Auf meinem realen Display wird gar nichts> angezeigt.
Poste das bitte mal hier: http://www.brtcommunity.com/
So nach dem Motto "melden macht frei".
Mal schauen, was Bridgetek dazu zu sagen hat.
Wichtig wäre noch irgendwie zu verifizieren, dass die Glyphen wirklich
im Font enthalten sind, die könnten ja auch bei der Konvertierung schon
verloren gehen.
Eine Möglichkeit wäre dann vielleicht noch die Glyphen direkt selber
anzuzeigen.
Wenn Du im EVE Screen Editor unten mal das Tab "Inspector" auswählst
siehst
Du was der aus den Kommandos macht.
Bei mir taucht mit zwei Zeichen gerade das hier auf:
Raw Text
11 0x0500000d BITMAP_HANDLE(13)
12 0x1f000001 BEGIN(BITMAPS)
13 0x0182c1ce BITMAP_SOURCE(0x800000 | 180686)
14 0x405a02d0 VERTEX2F(180, 720)
15 0x01819cf4 BITMAP_SOURCE(0x800000 | 105716)
16 0x410802d0 VERTEX2F(528, 720)
Also im Grunde zerlegt der Co-Prozesser für das CMD_TEXT den String und
berechnet für jedes Zeichen die Position und welches Bild anzuzeigen
ist.
Der Knackpunkt wäre die Adresse zu finden, die steht wohl in der .glyph
drin.
Rudolph schrieb:> Poste das bitte mal hier: http://www.brtcommunity.com/> So nach dem Motto "melden macht frei".> Mal schauen, was Bridgetek dazu zu sagen hat.
Ok mache ich im Laufe des Tages mal.
Rudolph schrieb:> Wenn Du im EVE Screen Editor unten mal das Tab "Inspector" auswählst> siehst> Du was der aus den Kommandos macht.
Das habe ich gemacht und er macht aus meinem Pfeil tatsächlich zwei
Fragezeichen:
Das ist meine Eingabe:
1
CMD_TEXT(123,117,13,0,"??")
und das kommt dabei heraus:
Raw Text
13 0x01879bb4 BITMAP_SOURCE(0x800000 | 498612)
14 0x40f601d4 VERTEX2F(492, 468)
15 0x01879bb4 BITMAP_SOURCE(0x800000 | 498612)
16 0x411201d4 VERTEX2F(548, 468)
17 0x01879bb4 BITMAP_SOURCE(0x800000 | 498612)
18 0x412e01d4 VERTEX2F(604, 468)
Das merkwürdige ist, dass immer zwei Fragezeichen herauskommen, egal
welches 4-Byte codierte Zeichen ich eingebe. Es scheint also von
Bridgtek bewusst abgefangen zu werden....
Kann man so einen Font irgendwo frei herunter laden um das mal
auszuprobieren?
Und ich merke gerade das mir was Fonts angeht etwas die Tools fehlen.
Naja, für sowas wie "Prüfstand" habe ich das auch schon mal eingetippt
und einen Screenshot davon gemacht. :-)
Das ist ein wenig anstrengender als ich dachte. :-)
Der Pfeil ist also U+1F843, damit findet man den dann zum Beispiel auch
in der Character-Tabelle zu dem Symbole Font.
In UTF-8 kodiert sind das die F0 9F A1 83 - was ja sofort offensichtlich
im Zusammenhang steht. :-)
Nun ist 00000 bis 0FFFD der Bereich BMP - Basic Multilingual Plane.
Und 1F843 gehört zum nächsten Bereich SMP - Supplementary Multilingual
Plane und ist da im Block "Supplemental Arrows-C".
https://www.sql-und-xml.de/unicode-database/#blockbereiche
Da wird in den BT81x wohl "nur" BMP implementiert sein.
Scheinbar hat das Windows Tool "Zeichentabelle" das gleiche Problem, da
finde ich die Pfeile nämlich auch nicht.
Hast Du mal versucht den Offset der Glpyhe auszurechnen um diese direkt
anzuzeigen?
Also wie hier:
11 0x0500000d BITMAP_HANDLE(13)
12 0x1f000001 BEGIN(BITMAPS)
13 0x0182c1ce BITMAP_SOURCE(0x800000 | 180686)
14 0x405a02d0 VERTEX2F(180, 720)
Im "BT81X Series Programminung Guide 1.1" steht auf Seite 100 / 101
wie man die die Adresse berechnet.
Dazu muss man die .glpyh auslesen.
Und dann im Kern sowas hier:
return (xf->start_of_graphic_data + xf->gptr[cp / 128] + bytes_per_glyph
* (cp % 128) / 32);
Das hilft nur nicht, wenn die Daten gar nicht erst enthalten sind.
Rudolph schrieb:> Da wird in den BT81x wohl "nur" BMP implementiert sein.
Das ist auch meine aktuelle Vermutung. Auf der BRT Seite hat sich leider
noch nicht allzu viel getan, bin mal gespannt was da von Bridgtek als
Antwort kommt.
Rudolph schrieb:> Hast Du mal versucht den Offset der Glpyhe auszurechnen um diese direkt> anzuzeigen?
Hatte ich noch nicht probiert. Habe das gestern auch nur kurz probieren
können. Bei meinen errechneten Adressen ist der Screen Editor allerdings
abgestürzt, obwohl der Adressbereich eigentlich gültig war. Ich gucke
mir das bei Gelegenhiet nochmal in Ruhe an. Danke für den Tipp.
Ich habe mal ein wenig mit Fonts gespielt und mir fehlt vor allem immer
noch ein Tool mit dem man Code-Blöcke aus Fonts löschen kann.
Über 8000 Glyphen zu haben ist zwar ganz nett, wenn man das auf Bitmap
mit einer festen Größe konvertiert wird das aber schnell unlustig.
Der Webfont-Generator auf www.fontsquirrel.com ist schon sehr hilfreich,
den finde ich von den Optionen her aber ein wenig eingeschränkt.
Und ich bin nicht mal sicher, ob der mit den Bereichen jenseits von BMP
klar kommt.
Dann habe ich mir mal die resultierende .xfont Datei angesehen die der
EVE Asset Builder erzeugt.
Und eine Sache ist schon mal sehr seltsam, die Anzahl der Glpyhen steht
immer auf 65536, egal wie viele Glyphen der Font wirklich hat.
Bisher habe ich immer nur alle Glyphen oder eine so geringe Auswahl
verwendet, dass ich die händisch in eine .txt-Datei geschrieben habe.
Die kann man ja dann in den EVE Asset Builder laden als Vorgabe.
Deswegen kann ich dir aktuell beim Thema Software zur Auswahl von
Codeblöcken leider auch nicht weiterhelfen.
Rudolph schrieb:> Dann habe ich mir mal die resultierende .xfont Datei angesehen die der> EVE Asset Builder erzeugt.
Worin hast du dir die denn angesehen? In Notepad++ oder im hex-Editor
kann ich da keine Rückschlüsse auf die Anzahl der Glyphen ziehen. Aber
das würde ja die Vermutung bestätigen dass das einfach nicht vorgesehen
ist.
Die .xfont habe ich einfach mit einem Hex-Editor aufgemacht.
Die Struktur dazu steht ja im Programming Manual.
Das sieht dann zum Beispiel so aus:
FF AA 00 01 Signatur
90 22 00 00 Size
B5 93 00 00 Format
4A 02 00 00 Swizzle
60 00 00 00 Layout Width
04 00 00 00 Layout Height
30 00 00 00 Pixel Width
14 00 00 00 Pixel Height
80 00 80 00 Start of Graphic Data
00 00 01 00 Number of Characters
00 2E 10 00 gptr - Offsets to glyph data
Anhand der Signatur sieht man, dass das erste Byte das LSB ist.
Die "Number of Characters" scheint dabei schon mal nicht richtig gesetzt
zu werden, da steht immer 0x00010000 drin.
Ach stimmt da war ja was...
Rudolph schrieb:> Die "Number of Characters" scheint dabei schon mal nicht richtig gesetzt> zu werden, da steht immer 0x00010000 drin.
Habe das jetzt mal für verschiedene Schriften durchgeschaut und kann das
nicht bestätigen. Bei mir variiert das je nach Anzahl enthaltener
Zeichen (damit meine ich die Anzahl an Zeichen, die ich über die
.txt-Datei vorgeben habe).
Auffällig ist allerdings dass der Wert immer kleiner oder gleich 65536
ist. Bei der Symbolschrift, mit der ich die beschriebenen Probleme habe,
steht der besagte Wert von 65536 drin.
Ich habe aktuell den Symbola.ttf mit den 8xxx Glyphen durch den EVE
Asset Builder gezogen, ASTC, 12 Punkt, sowie einen Notosans-regular den
ich mit Fontsquirrel auf 222 Glyphen reduziert habe.
Also einfach machen lassen ohne das über eine Datei einzuschränken.
Und da steht beide Male 0x00010000 drin.
Jetzt habe ich gerade mal den Notosans-regular mit 32xx Glyphen
durchlaufen lassen und da ist das auch so.
Habe das auch nochmal ausprobiert. Dieser Wert scheint sich auf die
Einschränkungen durch die .txt-Datei zu beziehen. Wenn ich den gesamten
Schriftsatz konvertiere habe ich auch immer den Wert 0x00010000.
Naja, mal davon ab, dass es dann eben nicht die Anzahl der Zeichen ist,
das ist ja auch noch ein wenig niedrig angesetzt, so eigentlich.
Leider mahlen die Mühlen bei Bridgtek etwas sehr langsam und das hart
moderierte Forum hilft da auch wenig diesen Eindruck zu entschärfen.
"We discovered an issue with EAB regarding 4-byte UTF-8 characters.
EAB v1.4 is scheduled at Mar 25 and will include a fix for this."
Na, das klingt doch sehr vielversprechend und lange hin ist das auch
nicht mehr. :-)
Das interpretiere ich so, dass EVE das grundsätzlich kann, die Daten nur
gar nicht erst durch den Konverter gegangen sind.
Hello all,
I'm trying to figure out how to upload custom font to ram into BT815. I
have Riverdi RVT43ULBNWC03 connected to ESP32 (arduino framework). I
generated font files in EVE Asset Builder and tried to upload content of
.raw file with EVE_cmd_loadimage command but display stuck on black
screen... Can someone explain me how to upload fonts to BT81x?
Well, do you also have a USB/SPI adapter like the Hermes board from
Riverdi?
https://riverdi.com/product/hermes-board/
With that you can upload the flash image using the EVE Asset Builder to
the on-board SPI-FLASH on the display.
In order to upload the data to EVEs G-RAM the font would need to be
rather small.
Either way, EVE_cmd_loadimage() is only for .jpg and .png images.
You either need EVE_memWrite_flash_buffer() to transfer raw data from
your target controller to G-RAM or EVE_cmd_inflate() if the data is
z-lib compressed.
If you have the font data in the external SPI-FLASH you can use it
directly from there if it is compressed in ASTC format.
In this case you only need to copy the .xfont file to G-RAM.
Preferably with EVE_cmd_flashread() as the .xfont can be stored in the
SPI-FLASH as well.
When you have the .xfont in G-RAM and the .glyph either in G-RAM or in
the SPI-FLASH you need to use EVE_cmd_setfont2() to assign a
bitmap-handle to the new font.
What font are you using, how do you convert it and what sizes do the
resulting files have?
Hello Rudolph,
thank you for your answer. I don't have Hermes Board from Riverdi. I'm
basing on AN277 from FTDI:
https://www.ftdichip.com/Support/Documents/AppNotes/AN_277_FT800_Custom_Font_Implement.pdf
I made .raw and .rawh files in EVE Asset Builder (Legacy Format), added
content of metricblock and font table to my font.c file, and I tried to
use it as in the AN277.
Is it possible to upload a font to FLASH via ESP32?
Okay, so this is legacy format with a maximum of 128 characters.
You can just follow the application note then.
It would be possible to write the data to the SPI-FLASH but this would
only make things more complicated.
The code in the application note has this:
//load font data into memory
Ft_Gpu_Hal_WrMemFromFlash(phost, RAM_G + 1000,
SAMApp_ShowCustomFont_MetricBlock, 148);
Ft_Gpu_Hal_WrMemFromFlash(phost, RAM_G + 1000 + 148,
SAMApp_ShowCustomFont_FontBmpData,
36432);
Translated to my library this is:
EVE_memWrite_flash_buffer(RAM_G + 1000,
SAMApp_ShowCustomFont_MetricBlock, 148);
EVE_memWrite_flash_buffer(RAM_G + 1000 + 148,
SAMApp_ShowCustomFont_FontBmpData,
36432);
When you have this up and running you can try to use setfont2 instead.
But not like in the application note.
I have no idea what the guys at FTDI where thinking when they did
chapter 4.2 but it makes the example overly complicated by loading the
data from a file instead of loading it from the controllers memory like
in 4.1.
And loading a file from disk while building a display list also is not
the brightest idea.
Also the example is plain wrong, the four lines before
Ft_Gpu_CoCmd_SetFont2() are useless, Setfont2 takes care of this.
And the comment says that it sets the starting character to 32 but the
parameter is "97".
I do not have an ESP32 here right now but a whole lot of displays
including a Riverdi 4.3" and a Matrix Orbital EVE3-43G.
And to test this with an Arduino I could use the CFAF800480E1 from
Crystalfontz which has a FT813.
See:
https://github.com/RudolphRiedel/FT800-FT813/tree/4.x/example_projects/EVE_Test_Arduino_PlatformIO
Just change the target in platformio.ini , switch to EVE_RiTFT43 in
EVE_config.h.
Then check the end of EVE_target.h for the Arduino options.
You need to provide the pins for Chip-Select and Power-Down.
And I am not sure about the ESP32, if the Arduino target provides a
SPI.transfer() function the example already should compile and run just
fine.
Okay, I just went ahead and tried to build my Arduino example for ESP32.
platformio.ini:
[env:esp32]
platform = espressif32
board = wemos_d1_mini32
framework = arduino
EVE_target.h:
...
#if defined (ARDUINO)
#include <Arduino.h>
#include <stdio.h>
#include <SPI.h>
#define EVE_CS 9
#define EVE_PDN 8
...
For some reason the ESP32 needs the Arduino.h include while it just
builds for the Uno and the Due.
And then there are warnings that NOP() gets redefined in EVE.h.
So you can just comment out line 757 of EVE.h:
//#define NOP() ((45UL<<24))
With that it at least builds for ESP32.
Hello,
thank you very much for your help. I will test it tomorrow. I know about
warning with NOP and Arduino.h definitions. This is the case for every
project.
Hello,
I bought Hermes and I uploaded the fonts to flash- it works perfectly
:). But now I have problem with PNG without background.
I have a white icon (WIFI status) with background transparency. But when
I display it on TFT I have icon in color that was previoulsy defined.
When the color is the same like background where icon is, then it should
be white, but it have color little bit darker than background.
Hallo Rudolph,
ich würde mich freuen, wenn du mir weiterhelfen würdest.
Ich programmiere aktuell das EVE 3 7 Zoll Touchdisplay von Riverdi mit
einem Nucleo STM32 Board. Dafür benutze ich die von Riverdi zur
Verfügung gestellte Bibliothek in C.
Ich habe den EIndruck, dass ich leider das noch nicht ganz genau mit dem
FIFO vom Grafikcontroller verstanden habe.
Jedenfalls habe ich mir folgenden Demo-Code gemacht:
Gpu_CoCmd_Dlstart(phost);
App_WrCoCmd_Buffer(phost, CLEAR_COLOR_RGB(0,0,255));
App_WrCoCmd_Buffer(phost, CLEAR(1, 1, 1));
App_WrCoCmd_Buffer(phost, BEGIN(BITMAPS));
App_WrCoCmd_Buffer(phost, VERTEX2II(220, 110, 26, 'T'));
App_WrCoCmd_Buffer(phost, VERTEX2II(244, 110, 26, 'E'));
App_WrCoCmd_Buffer(phost, VERTEX2II(270, 110, 26, 'X'));
App_WrCoCmd_Buffer(phost, VERTEX2II(299, 110, 26, 'T'));
App_WrCoCmd_Buffer(phost, END());
App_WrCoCmd_Buffer(phost, COLOR_RGB(160, 22, 22));
App_WrCoCmd_Buffer(phost, POINT_SIZE(320));
App_WrCoCmd_Buffer(phost, BEGIN(POINTS));
App_WrCoCmd_Buffer(phost, VERTEX2II(192, 133, 0, 0));
Gpu_CoCmd_Number(phost, 50, 100, 26,OPT_SIGNED, value);
Gpu_CoCmd_Text(phost, 0,0, 26,0, "Hallo Welt");
Gpu_CoCmd_Text(phost, 100,0, 26,0, "Hallo Welt");
//Gpu_CoCmd_Text(phost, 200,0, 26,0, "Hallo Welt");
//App_WrCoCmd_Buffer(phost, VERTEX2II(320, 110, 31, 'T'));
App_WrCoCmd_Buffer(phost, END());
App_WrCoCmd_Buffer(phost, DISPLAY());
Gpu_Hal_WaitCmdfifo_empty(phost);
App_Flush_Co_Buffer(phost);
Gpu_CoCmd_Swap(phost);
Wenn ich den Code so ausführen lasse, dann sehe ich alle Elemente, die
ich programmiert habe. Wenn ich jedoch eines der auskommentierten
Befehle noch hinzufüge, bleibt der Bildschirm schwarz.
Weißt du, was das Problem sein könnte?
Mein erster Gedanke war, dass der FIFO voll ist. Das kann aber nicht
sein, da das bei jedem Befehl gecheckt wird und so lange gewartet wird,
bis genug Platz vorhanden ist und dann wird der Befehl erst
reingeschrieben. Und ich habe es auch schon mit dem Debugger gecheckt:
Es werden alle Befehle ausgeführt, nur rührt sich das Display nicht.
Viele Grüße
Vladi
JohnLemon schrieb:> drawBitmap(MEM_ICON_WIFI, 130, 3, 25, 25, EVE_RGB565, 0, WHITE);
That is your issue: EVE_ARGB1555
When you direclty load truecolor .png images they load as RGB565 - no
alpha channel.
Either convert the images to ARG1555 and load them with cmd_inflate or
even better since you already have the Hermes board now, use ASTC
directly from the SPI-FLASH.
For example 8x8 which would be "EVE_COMPRESSED_RGBA_ASTC_8x8_KHR".
EVE_cmd_setbitmap(0x800000 | (adr_in_flash / 32),
EVE_COMPRESSED_RGBA_ASTC_8x8_KHR, sizex, sizey);
Vladislav N. schrieb:> ich würde mich freuen, wenn du mir weiterhelfen würdest.
Ich kann es versuchen, aber...
> Ich programmiere aktuell das EVE 3 7 Zoll Touchdisplay von Riverdi mit> einem Nucleo STM32 Board. Dafür benutze ich die von Riverdi zur> Verfügung gestellte Bibliothek in C.
...ich habe weder richtig Erfahrung mit den Nucleo Boards, noch bin ich
ein Freund der ersten Library von FTDI.
Einer der Gründe warum ich meine eigene Library geschrieben habe war,
dass mich der Code von FTDI so gar nicht überzeut hat.
Die erste Frage wäre ja mal, welcher STM32?
Für die F4xx habe ich ja schon Support eingebaut und auch ein PlatformIO
Projekt dazu das zumindest mal baut.
Vladislav N. schrieb:> Ich habe den EIndruck, dass ich leider das noch nicht ganz genau mit dem> FIFO vom Grafikcontroller verstanden habe.
Ich habe mir mal erlaubt ein .pdf von Crystalfontz anzuhängen, das
findet sich in den Datenblättern von deren Displays.
Das ist zwar für die EVE2, aber ich fand das schon sehr anschaulich.
Vladislav N. schrieb:> Weißt du, was das Problem sein könnte?
Das ist es, nur die beiden auskommentierten Zeilen?
Naja, das erste ist mal, BEGIN und END gehören Paar-weise zusammen.
Und dann ist die Zeile
//App_WrCoCmd_Buffer(phost, VERTEX2II(320, 110, 31, 'T'));
so komplett aus dem Kontext gerissen.
Ohne das
App_WrCoCmd_Buffer(phost, BEGIN(BITMAPS));
machen VERTEX2II und VERTEX2F gar nichts.
Das VERTEX2II soll ja ein Bild anzeigen, 31 ist das Bitmap-Handle,
vorbelegt durch einen Zeichensatz.
Und 'T' ist die Nummer 84, das 84. Bild aus dem Set, auch Zelle genann
oder eben "cell".
Vladislav N. schrieb:> Mein erster Gedanke war, dass der FIFO voll ist.
Der FIFO hat 4k, so leicht bekommt man den nicht voll. :-)
Danke für die Datei. Die ist hilfreich!
Ich habe das Nucleo f20zfg (STM32 f2xx).
Ja wenn ich weiterhin nicht klar komme mit der Bibliothek, werde ich
deine mal versuchen. Nur dann müsste ich den Code nochmal auf f2xx
anpassen.
Ah ok ja stimmt das mit dem VERTEX Zeile ist wirklich ohne Zusammenhang
^^
Aber das ist nicht das Problem. Diese auskommentierte Zeile können wir
ruhig ganz ignorieren. Aber das Problem ist: Sobald ich das dritte
"Hallo Welt" einkommentiere, dann wird gar nichts mehr angezeigt. Wenn
ich das weglasse, dann werden die anderen Befehle problemlos angezeigt.
Was genau hat dir eigentlich nicht gefallen an der Bridgetek Bibliothek?
Vladislav N. schrieb:> Ja wenn ich weiterhin nicht klar komme mit der Bibliothek, werde ich> deine mal versuchen. Nur dann müsste ich den Code nochmal auf f2xx> anpassen.
Das habe ich gerade mal versucht und ein PlatformIO Projekt dafür
aufgesetzt, analog zu dem F407 Projekt das ich schon hatte.
So wie es aussieht ist das HAL für den STM32F2xx komplett gleich zu
benutzen wie das für den F4xx.
Ich habe in der EVE_target.h einfach nur den Block für den STM32F4
kopiert und die Includes geändert.
Die größte Herausforderung war jetzt das richtige Define zu finden.
Die PlatformIO Board Dateien sind da hilfreich und so habe ich für das
Nucleo_F207ZG schliesslich "#if defined (STM32F207xx)" gewählt.
Da müssen jetzt nur noch die Pins richtig angegeben werden.
Und wie beim letzten Projekt hier weiter oben, die main.c ist praktisch
leer, das funktioniert so nicht, das ist nur um zu schauen ob es
compiliert!
Warning This does compile but main.c does not work the way it is now!
Und schlau wäre auch in der EVE_target.c noch die entsprechenden
Funktionen einzubauen um DMA machen zu können.
Nur benutze ich eben keine STM32 und zur Verfügung gestellt hat das
bisher auch niemand.
Vladislav N. schrieb:> Aber das Problem ist: Sobald ich das dritte> "Hallo Welt" einkommentiere, dann wird gar nichts mehr angezeigt.
Hast Du das mit dem BEGIN/END denn gefixt?
Vladislav N. schrieb:> Was genau hat dir eigentlich nicht gefallen an der Bridgetek Bibliothek?
Boah, so viele Ding und zu lange her. :-)
Aber wenn Du Dir nur mal die Zeilen ansiehst die Du gepostet hast, da
taucht überall als Parameter "phost" auf.
Davon halte ich soweit gar nichts, das ist nämlich gar nicht für die
Verwendung mit einem Mikro-Controller gedacht.
Anstatt das jedesmal wieder und komplett redundant zu übergeben habe ich
den entscheidenden Parameter "cmdOffset" zu einer globalen Variable
gemacht die auch absichtlich nur in der EVE_commands.c drin ist und
nicht über die EVE_commands.h exportiert wird.
Und das ständige checken und noch mal checken des FIFOs bremst das ganz
gut aus.
Meine Implementierung mag nicht ganz so robust sein, zum Beispiel könnte
man den FIFO zu voll machen wenn man die Display-Liste erzeugt.
Aber wenn man das im Blick hat ist das komplett beherrschbar und so wie
ich das implementiert habe deutlich schneller.
Das kostet ein paar kB extra, zugegeben.
Siehe auch das hier: http://www.brtcommunity.com/index.php?topic=100.0
Die neue "Portable MCU Library for EVE", beschrieben in BRT_AN_025
gefällt mir deutlich besser als die erste Library von FTDI.
Wenn es das damals schon gegeben hätte, hätte ich meine Version
vielleicht gar nicht angefangen.
Nur ist mein Code aktuell mit dem gleichen Controller eine ganze Ecke
schneller.
Das was Riverdi in der Bibliothek gemacht hat ist auch deutlich
aufgeräumter als die erste Implementierung von FTDI, viel leichter zu
verstehen was da überhaupt passiert.
Ich bin allerdings sehr sicher, dass das langsamer läuft als meine
Version.
Dankeschön,das hört sich gut an. Ich habe bislang noch nichts von
PlatformIO gehört. Müsste mal ein neues Projekt in CubeIDE erstellen und
die Dateien einfügen.
Ich habe jedenfalls gerade das Problem "behoben". Es sind gerade ganz
verrückte Sachen passiert. Ich habe den Eindruck, der Grafikcontroller
führt ein Eigenleben...
Ich bin auf die Idee gekommen, den Befehl
Gpu_Hal_WaitCmdfifo_empty(phost) auszukommentieren. Dann hat die Anzeige
plötzlich wie gewünscht geklappt. Auch etliche weitere Befehle wurden
hinzugefügt und auch die problemlos angezeigt. Dann wollte ich mal beide
Varianten mit dem Debugger vergleichen und mir den Befehl der wartet,
bis der FIFO abgearbeitet wurde, genauer anschauen. Plötzlich ging die
Anzeige auch als ich den Befehl einkommentiert hatte. Dann habe ich noch
ein paar weitere Male das Programm draufgeflasht und alles war gut trotz
des Befehls. Dann habe ich mal die Versorgungsspannung an und aus
gemacht und dann ging es mit dem Befehl wieder nicht... oh ja Embedded
Systeme sind manchnmal ganz komisch...
Jedenfalls denke ich, dass das nun der Fehler ist: Lieber
Gpu_Hal_WaitCmdfifo_empty(phost) weglassen. Auch wenn ich nicht verstehe
warum... Was ist das Problem? Dann wartet er eben noch bis der FIFO
abgearbeitet wurde und erst dann wechselt er die Displayliste. Das war
ja jetzt keine zeitkritisches Beispiel...(das Programm hat sich ja nie
aufgehangen in ner Endschlosschleife, sondern wurde immer ganz
durchgeführt.) Hast du als erfahrener Programmierer eine Erklärung? :D
Abgesehen davon: Warum wird eigentlich vom Hersteller im Datenblatt
empfohlen, nicht direkt in die Displayliste zu schreiben, sondern den
Umweg über den Co-Prozessor zu machen?
Was diesbezüglich komisch ist: Bei so einem Beispielprogramm von Riverdi
wo ein Bildschirmschoner realisiert wurde (Ball baumelt von Ecke zu
Ecke) haben die das nur mit direkten Befehlen in die DL gemacht...
Eine weitere Frage hätte ich auch noch: In der Riverdi Bibliothek kann
man mit einem define auch noch eine "BUFFER_OPTIMIZATION" hinzuschalten.
Ich habe mir mal den Code angeguckt und wenn man das aktiviert, dann
werden die Befehle für den Co-Prozessor bzw. die DL-Befehle in einem
extra Buffer gespeichert. Ich habe dir mal die entscheidenden vier
Funktionen als Code im Anhang gepackt. Und mit den Befehlen
App_Flush_Co_Buffer(phost); bzw App_Flush_DL_Buffer(phost); wird der
Buffer dann komplett in RAM_CMD bzw. RAM_DL geschrieben. Wenn man das
nicht aktiviert hat, dann wird jeder Befehl sofort in RAM_CMD bzw.
RAM_DL geschrieben. Aber das komische ist: Wenn man diese Funktion
aktiviert hat, dann passiert beides: Also dann wird beispielsweise durch
den Befehl App_WrCoCmd_Buffer(Gpu_Hal_Context_t *phost,uint32_t cmd)
sowohl der Buffer mit dem CMD gefüllt als auch sofort der CMD in RAM_CMD
geschrieben. Und wenn man am Ende dann auch noch
App_Flush_Co_Buffer(phost) schreibt, dann sind die Befehle ja doppelt in
RAM_CMD.Einmal erst durch das direkte schreiben und danach nochmal nach
schreiben des Buffer Inhalts. Ich weiß nicht ob das so gewollt? Eher
nicht. Oder sollte man wenn man die BUFFER_OPTIMIZATION macht dann den
anderen Codeteil der den Befehl direkt in den Speicher schreibt
weglassen?
Was ich noch nicht erwähnt habe: Wenn man die die Funktion zuschaltet,
dann wird auch geprüft, ob der Buffer schon voll ist. Wenn ja dann wird
der komplette Inhalt direkt in den Speicher geschrieben
Jedenfalls liefen bei mir deren Demos stabiler als ich die
BUFFER_OPTIMIZATION hinzugeschaltet habe (ohne hat es geflackert und mit
gab es dann kein Flackern mehr).
Eine andere Sache noch:
Ich habe mit folgendem Programm, welches in der main() in der
Dauerschleife läuft, versucht einfach mal die Touchkordinaten und den
Tag Wert auf dem Bildschirm anzuzeigen:
void touchVersuch(Gpu_Hal_Context_t *phost, uint8_t* p_currTag,
uint16_t* p_x_pos, uint16_t* p_y_pos)
{
uint8_t tag = App_Touch_Update(phost, p_currTag, p_x_pos, p_y_pos);
*p_currTag = tag;
Gpu_CoCmd_Dlstart(phost);
App_WrCoCmd_Buffer(phost, CLEAR_COLOR_RGB(0,0,255));
App_WrCoCmd_Buffer(phost, CLEAR(1, 1, 1));
Gpu_CoCmd_Number(phost, 0, 0, 26 ,OPT_SIGNED,*p_x_pos);
Gpu_CoCmd_Number(phost, 0, 20, 26 ,OPT_SIGNED,*p_y_pos);
Gpu_CoCmd_Number(phost, 0, 40, 26 ,OPT_SIGNED,*p_currTag);
App_WrCoCmd_Buffer(phost, DISPLAY());
//Gpu_Hal_WaitCmdfifo_empty(phost);
App_Flush_Co_Buffer(phost);
Gpu_CoCmd_Swap(phost);
}
Aber leider läuft das kaum. Nur zufällig mal. Mal kann ich mir die X
Koordinaten anzeigen aber nach ner Zeit hängt es sich auf. Manchmal
kommt direkt ein starres Bild, was sich durch Touch nicht mehr ändert.
X- und Y Werte zusammen aktuallisieren klappt nie.
Weißt du das Problem?
Um das noch mal zu erwähnen, ich bin für die Merkwürdigkeiten in der
FTDI Library und auch der Variante davon von Riverdi ein wenig der
falsche Ansprechpartner. :-)
PlatformIO, vor allem in Kombination mit VScode ist enorm praktisch um
"mal eben schnell" ein Projekt für zig verschiedene Platformen
aufzusetzen.
Zumindest solange es eine passende Board-Definition gibt.
CubeIDE habe ich gar nicht - und auch gar keine Verwendung dafür, weil
ich mit den STM32 eben nichts anfangen kann.
Aber das Projekt da oben hat "stm32cube" als Framework.
Das mit dem Auskommentieren von Gpu_Hal_WaitCmdfifo_empty() ist
merkwürdig.
Wie oft rufst Du den Display-Code eigentlich auf?
Das muss schon seltener passieren als die Bildrate vom Display ist.
Vladislav N. schrieb:> Abgesehen davon: Warum wird eigentlich vom Hersteller im Datenblatt> empfohlen, nicht direkt in die Displayliste zu schreiben, sondern den> Umweg über den Co-Prozessor zu machen?
Wird das wirklich irgendwo empfohlen?
Der Co-Prozessor kann auf jeden Fall mehr und man muss auch weniger
Daten übertragen, viele einfache Kommandos werden in mehrere Befehle in
der Display-Liste zerlegt.
Spiel mal mit dem EVE Screen Editor.
Wenn Du da was von links in den Bildschirm ziehst, etwa ein "Text" dann
taucht unten dazu auf was in den Co-Prozessor FIFO geschrieben wird.
Schaltet man dann den Tab unten auf "Inspector" um so sieht man was der
Co-Prozessor da draus für Display-Listen Befehle macht.
Ein "einfacher" Button ist im Ergebnis doch ganz nett komplex.
Vladislav N. schrieb:> Eine weitere Frage hätte ich auch noch: In der Riverdi Bibliothek kann> man mit einem define auch noch eine "BUFFER_OPTIMIZATION" hinzuschalten.
Eigentlich nützlich ist sowas um den erzeugten Puffer dann anschliessend
per DMA zu übertragen.
Optimiert ist das so in dem Sinne nur dadurch, dass beim Erzeugen des
Puffers nicht auf das Ende der SPI-Übertragung gewartet wird.
Aber ob man nun Kommando-SPI-Kommando-SPI oder Kommando-Kommando SPI-SPI
auführt ändert in Summe ja nichts an der Ausführungszeit.
Vladislav N. schrieb:> Aber das komische ist: Wenn man diese Funktion> aktiviert hat, dann passiert beides: Also dann wird beispielsweise durch> den Befehl App_WrCoCmd_Buffer(Gpu_Hal_Context_t *phost,uint32_t cmd)> sowohl der Buffer mit dem CMD gefüllt als auch sofort der CMD in RAM_CMD> geschrieben.
Okay, das ist Unsinn, mit der Option an sollten die Kommandos nicht mehr
direkt auf den SPI schreiben.
Vladislav N. schrieb:> void touchVersuch(Gpu_Hal_Context_t *phost, uint8_t* p_currTag,> uint16_t* p_x_pos, uint16_t* p_y_pos)> {> uint8_t tag = App_Touch_Update(phost, p_currTag, p_x_pos, p_y_pos);> *p_currTag = tag;> Gpu_CoCmd_Dlstart(phost);> App_WrCoCmd_Buffer(phost, CLEAR_COLOR_RGB(0,0,255));> App_WrCoCmd_Buffer(phost, CLEAR(1, 1, 1));> Gpu_CoCmd_Number(phost, 0, 0, 26 ,OPT_SIGNED,*p_x_pos);> Gpu_CoCmd_Number(phost, 0, 20, 26 ,OPT_SIGNED,*p_y_pos);> Gpu_CoCmd_Number(phost, 0, 40, 26 ,OPT_SIGNED,*p_currTag);> App_WrCoCmd_Buffer(phost, DISPLAY());> //Gpu_Hal_WaitCmdfifo_empty(phost);> App_Flush_Co_Buffer(phost);> Gpu_CoCmd_Swap(phost);> }
Das verwirrt mich jetzt doch mal, ich benutze das ja selber nie.
Aber ist das wirklich richtig, dass das "App_WrCoCmd_Buffer" mit
"Gpu_CoCmd_Number" vermischt wird?
Muss wohl so, aber konsistent ist sowas nicht gerade.
Auf jeden Fall ist "App_Touch_Update()" wohl eher nicht so hilfreich.
Da passiert doch einfach mal zu viel drin.
Hilfreicher wäre da:
Gpu_Hal_Rd8(phost,REG_TOUCH_TAG);
Nur dazu müsstest Du in der Display-Liste überhaupt mal einen Touch-Tag
vergeben und in dem Ausschnitt ist nichts.
Ohne Touch-Tag wäre das hier besser:
Gpu_Hal_Rd32(phost, REG_TOUCH_SCREEN_XY);
Und einfach mal mit cmd_number ausgeben.
Mir ist da am Ende noch aufgefallen das die Reihenfolge von
App_Flush_Co_Buufer und Gpu_Hal_WaitCmdfifo_empty falsch herum war.
Und nachdem ich jetzt meinen Code eingefügt habe, habe ich noch die
Position von dem SWAP Kommando verändert.
Bei mir würde das so aussehen:
1
void TFT_display(void)
2
{
3
uint32_t koordinaten;
4
5
koordinaten = EVE_memRead32(REG_TOUCH_SCREEN_XY);
6
7
EVE_cmd_dl(CMD_DLSTART); /* start the display list */
Ah ok das ist ja praktisch mit PlatformIO!
Ja vieleicht könnte das wirklich ein Problem bei mir sein mit dem
Timing. Denn damit kenne ich mich noch nicht so gut aus.
Das hier ist der Code, der automatisch von der Entwicklungsumgebung
erzeugt wurde zur für die SystemClockConfiguration:
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 13;
RCC_OscInitStruct.PLL.PLLN = 195;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 5;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) !=
HAL_OK)
{
Error_Handler();
}
Ich habe dann noch folgende paar Zeilen aus der Bibliothek von Riverdi
inkludiert. Anschließend war die Anzeige stabiler (vorher war die
Anzeige öfter mal zweigeteilt):
/* configure the Systick interrupt time */
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/* configure the Systick */
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
SystemCoreClock = 48000000; /* 48MHz */
SystemCoreClockUpdate();
Also gehe ich maol davon aus, dass das Bild mit ner Frequenz von 48 MHz
aktuallisiert wird.
So berechnet man dann die Bildrate des Displays:
800 x 480 = 384000 x 60 Hz x 24 Bit Auflösung = 552960000 Hz = 0,5 GHz
Der Aufruf ist also deutlich weniger als die Bildrate.
Oder habe ich jetzt irgendwas nicht verstanden?
Rudolph R. schrieb:> Wird das wirklich irgendwo empfohlen?
Ja habe den Ausschnitt aus dem BT81x Programmierguide mal angehängt.
Aber dort steht ja die Erklärung. Ist also nur eine Vorsichtsmaßnahme.
Ah ok man hat also einfach mehr Möglichkeiten mit dem Co-Prozessor.
Später sollte ich mich auch mal mit DMA befassen. Aktuell ist es nicht
in der Bib drinne aber habe gesehen, dass es von STM in der
HAL-Bibliothek da Funktionen für gibt. Oder ich nutze deine Lib dann
habe ich das schon :D Aber gut müsste bestimmt noch irgendwo mit den HAL
Befehlen ergänzen.
Rudolph R. schrieb:> Mir ist da am Ende noch aufgefallen das die Reihenfolge von> App_Flush_Co_Buufer und Gpu_Hal_WaitCmdfifo_empty falsch herum war.> Und nachdem ich jetzt meinen Code eingefügt habe, habe ich noch die> Position von dem SWAP Kommando verändert.
Also das verstehe ich nicht, warum ist das falsch rum? Erst muss man
doch die Anweisung geben, dass der Buffer in RAM_CMD geschrieben wird.
Dann kann man mit Gpu_Hal_WaitCmdfifo_empty(phost); prüfen, ob das
erledigt wurde (Also sind Lesezeiger REG_CMD_READ und Schreibzeiger
REG_CMD_WRITE gleich ?). Und falls ja anschließend die Display Liste
wechseln. Wo ist mein Denkfehler...?
Bist du dir sicher, dass der Code bei dir klappt mit dem Register
REG_TOUCH_SCREEN_XY?
Bei mir hat es leider nicht funktuioniert. Also prinzipiell schon wenn
man durchdebuggt. Aber nach ein paar Durchläufen hängt sich der Code auf
nach dem Befehl: App_Flush_Co_Buffer(phost); Aber paar mal konnte ich
wirklich den Registerwert auslesen und das wurde nach dem Swap Befehl
dann angezeigt auf dem Display beim Debuggen. Scheint irgendein Problem
mit dem Timing wohl zu geben...
Ja als nächstes werde ich mich mal mit dem EVE Screen Designer vertraut
machen.
Vladislav N. schrieb:> Das hier ist der Code, der automatisch von der Entwicklungsumgebung> erzeugt wurde zur für die SystemClockConfiguration:
Ja nun, ich habe gar keinen STM32. :-)
Vladislav N. schrieb:> SystemCoreClock = 48000000; /* 48MHz */> SystemCoreClockUpdate();>> Also gehe ich maol davon aus, dass das Bild mit ner Frequenz von 48 MHz> aktuallisiert wird.
Da draus geht bestenfalls hervor, dass Dein Controller mit 48MHz
getaktet ist.
Kann man machen, nur läuft der STM32F207 mit bis zu 120 MHz.
>So berechnet man dann die Bildrate des Displays:>800 x 480 = 384000 x 60 Hz x 24 Bit Auflösung = 552960000 Hz = 0,5 GHz
Äh, nein, die Bildrate wären die 60 Hz.
Aber die Bildrate sind auch nicht 60Hz, die ergeben sich aus dem
Pixel-Clock.
Bei mir steht PCLK für dieses Display auf 2 und mit meiner Library sind
das 36Mhz.
Wenn Riverdi da auch den Wert von 2 benutzt sind das entweder 30MHz oder
eben auch 36MHz, je nachdem ob sie den Takt passend zu den BT81x
einstellen.
Nun hat so ein Display nicht 800x480, das hat 1056 HCYCLE und 525
VCYCLE.
Die Bildrate beträgt also so 65 Hz oder 54 Hz.
-> Zwischen zwei Updates sollten mindestens 18,5 ms sein.
Meine Software aktualisiert das alle 20 ms.
Interessant wäre an der Stelle dann auch noch, wie schnell überhaupt der
SPI läuft.
Beim Init muss der nämlich langsamer als 11 MHz sein, danach darf der
bis zu 30 MHz haben, das muss man aber erstmal stabil hin bekommen.
Vladislav N. schrieb:>> Wird das wirklich irgendwo empfohlen?>> Ja habe den Ausschnitt aus dem BT81x Programmierguide mal angehängt.> Aber dort steht ja die Erklärung. Ist also nur eine Vorsichtsmaßnahme.
Ah okay, das ist nur Quatsch, so wie das formuliert ist.
Der Co-Prozessor schreibt ja nicht einfach so aus Jux in die
Display-Liste.
Richtiger wäre, dass es gefährlicher wird wenn man beides gleichzeitig
versucht.
Vladislav N. schrieb:> Also das verstehe ich nicht, warum ist das falsch rum? Erst muss man> doch die Anweisung geben, dass der Buffer in RAM_CMD geschrieben wird.> Dann kann man mit Gpu_Hal_WaitCmdfifo_empty(phost); prüfen, ob das> erledigt wurde (Also sind Lesezeiger REG_CMD_READ und Schreibzeiger> REG_CMD_WRITE gleich ?). Und falls ja anschließend die Display Liste> wechseln. Wo ist mein Denkfehler...?
Nun ja, und wo wird dann auf die Ausführung von dem CMD_SWAP gewartet?
Die spannende Frage dazu ist schon mal, was macht App_Flush_Co_Buffer()
eigentlich?
void App_Flush_Co_Buffer(Gpu_Hal_Context_t *phost)
{
#ifdef BUFFER_OPTIMIZATION
if (CmdBuffer_Index > 0)
Gpu_Hal_WrCmdBuf(phost,CmdBuffer,CmdBuffer_Index);
#endif
CmdBuffer_Index = 0;
}
So normalerweise, ohne diese "Buffer Optimisation" macht das praktisch
garnichts weiter. Es wird auch automatisch jedes einzelne Kommando
ausgeführt -> Handbremse.
Aber mit der "Buffer Optimisation" ist das der Befehl mit dem der
CMD-FIFO beschrieben und das dann ausgeführt wird.
Lustigerweise beinhaltet das übrigens auch das Warten.
void Gpu_Hal_WaitCmdfifo_empty (Gpu_Hal_Context_t *host)
{
while(Gpu_Hal_Rd16(host,REG_CMD_READ) !=
Gpu_Hal_Rd16(host,REG_CMD_WRITE));
host->cmd_fifo_wp = Gpu_Hal_Rd16(host,REG_CMD_WRITE);
}
Okay, das macht was ich erwartet habe, wenn auch eher nicht so prall.
Wenn man REG_CMD_WRITE schon beschreibt weil man besser auch trackt wo
der steht, dann muss man den nicht lesen.
Und wenn man den schon liest, dann reicht einmal völlig aus...
In einem Beispiel von Riverdi habe ich das aber auch gerade so gefunden:
App_WrCoCmd_Buffer(phost, DISPLAY());
Gpu_CoCmd_Swap(phost);
App_Flush_Co_Buffer(phost);
Gpu_Hal_WaitCmdfifo_empty(phost);
Also das gehört schon so herum.
Vladislav N. schrieb:> Bist du dir sicher, dass der Code bei dir klappt mit dem Register> REG_TOUCH_SCREEN_XY?
Ja, habe ich gerade mal ausprobiert.
Allerdings habe ich dabei noch festgestellt, dass dem CMD_NUMBER noch
eine Farbe fehlt:
EVE_cmd_dl(DL_COLOR_RGB | BLACK);
EVE_cmd_number(20, 20, 28, 0, koordinaten);
Und die Anzeige ist so alles anderes als nützlich, das gibt nur eine
dicke Zahl.
Als Hex-Werte wäre das hilfreicher, oder eben wenn man die X/Y
Koordinaten da raus zieht und getrennt ausgibt.
Das zeigt mir zwei Zahlen auf dem Display an, in Ruhe jeweils 32768 oder
auch 0x8000 wie es im Programming-Manual steht.
Und wenn ich mit dem Finger über das Display gehen werden mir die
Koordinaten angezeigt.
Das hat mich auch gerade darauf gebracht das mein Display schlecht
kalibriert ist.
Ich habe einen leichten Versatz nach Rechts und etwas mehr nach Oben.
Puhh ich habe das mit den unterschiedlichen Clocks nun mal versucht
nachzuvollziehen um PCLK herauszufinden und habe leider noch einiges an
Verständnisproblemen.
Ich habe mal den Code und nachvollzogen und dort wird eine externe
Quelle als Taktversorgung eingesetzt(Weiß ich jetzt nicht, warum
Riverdi nicht den internen relaxation oscillator clock benutzt).
Hier ist der Befehl:
Gpu_HostCommand(phost,GPU_EXTERNAL_OSC);
der ist mit 44h hinterlegt. Der Host Command 44h ist zum Festlegen der
PLL.
"Select PLL input from external crystal oscillator or external input
clock."
Laut Datenblatt kann man nur externe Quellen mit 12 MHz wählen, also
gehe ich davon aus, dass die PLL nun 12 MHz ist.
Nun verstehe ich den Host Befehl CLKSEL nicht. Wann benutzt man denn 61h
und wann 62h für das erste Byte?
Die benutzen bei der Initialisierung folgende Zeile:
Gpu_HostCommand(phost,GPU_PLL_48M)
GPU_PLL_48M ist mit 62h hinterlegt, also wird 620000h gesendet
Warum durch diesen Befehl die PLL auf 48 MHz setzen soll (so entnehme
ich das dem typedef) erschließt sich mir nicht. Im Anhang ist die
Bedeutung der Bits in Byte 2 zu sehen. Die sind ja alle 0.
"For compatibility to FT800/FT801, set Byte2 to 0x00. This will set the
PLL clock back to default (60 MHz)"
Also laut dem Zitat wird die "PLL" auf 60 MHz gesetzt. Und nicht auf 48
MHz?
Aber die eigentliche Funktion deises Befehl ist es ja, den Systemtakt
festzulegen:
"Select the system clock frequency. Note that software shall also update
the register value for REG_FREQUENCY to align with system clock
selected."
In der Library habe ich auch noch folgende Funktion gefunden (die aber
bei der Initialisierung nicht benutzt wurde):
Gpu_81X_SelectSysCLK (Gpu_Hal_Context_t *host,
GPU_81X_PLL_FREQ_T freq)
{
if(GPU_SYSCLK_72M == freq)
Gpu_HostCommand_Ext3(host, (uint32_t)0x61 | (0x40 << 8) | (0x06 <<
8));
else if(GPU_SYSCLK_60M == freq)
Gpu_HostCommand_Ext3(host, (uint32_t)0x61 | (0x40 << 8) | (0x05 <<
8));
else if(GPU_SYSCLK_48M == freq)
Gpu_HostCommand_Ext3(host, (uint32_t)0x61 | (0x40 << 8) | (0x04 <<
8));
else if(GPU_SYSCLK_36M == freq)
Gpu_HostCommand_Ext3(host, (uint32_t)0x61 | (0x03 << 8));
else if(GPU_SYSCLK_24M == freq)
Gpu_HostCommand_Ext3(host, (uint32_t)0x61 | (0x02 << 8));
else if(GPU_SYSCLK_DEFAULT == freq)
Gpu_HostCommand_Ext3(host, 0x61);
}
Da sie nicht benutzt wurde, gehe ich mal davon aus, dass der Systemtakt
60 MHz ist.
In das Register REG_PCLK schreiben Sie in der Initialisierung den Wert 2
rein, also denke ich mal, dass PCLK 30 MHz ist.
Rudolph R. schrieb:> Die Bildrate beträgt also so 65 Hz oder 54 Hz.
Wie hast du die Bildrate berechnet?
Rudolph R. schrieb:> Meine Software aktualisiert das alle 20 ms.
In welchem Teil deiner Library kann man das sehen, wie du das
eingestellt hast?
Rudolph R. schrieb:> Interessant wäre an der Stelle dann auch noch, wie schnell überhaupt der> SPI läuft.> Beim Init muss der nämlich langsamer als 11 MHz sein, danach darf der> bis zu 30 MHz haben, das muss man aber erstmal stabil hin bekommen.
Woher hast du die Info, dass er langsamer als 11 MHz sein muss? Also du
meinst bei der Initialisierung des Chips oder?
Ich habe jetzt übrigens mal diese
Vladislav N. schrieb:> /* configure the Systick interrupt time */> HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);>> /* configure the Systick */> HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);>> /* SysTick_IRQn interrupt configuration */> HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);>> SystemCoreClock = 48000000; /* 48MHz */> SystemCoreClockUpdate();
Ich habe überigens diese Befehle nun rausgenommen. Plötzlich
funktionieren die Beispiele von Riverdi es auch ohne diese Befehle
stabil. Also jetzt habe ich nur den Code für sie System Clock
Configuration der automatisch von der IDE erzeugt wurde (Da werden dann
auch die 120 MHZ benutzt :D)
Die Einstellungen des SPI habe ich graphisch über die IDE gemacht und da
habe ich den Baudraten prescaler auf 2, was einer Baudrate von 30 Mbit/s
entspricht. Die haben da nach so ein Beispiel wo das Bridgetek Logo
angezeigt wird. Das läuft mit den 30 Mhz nicht ganz stabil. Da Habe ich
herausgefunden, dass ein prescaler von 4 besser ist, also 15 MHz.
Aber mit beiden Frequenzen funktioniert das nicht mit der stabilen
Anzeige der X und Y-Werte.
Es wird wohl bestimmt daran liegen, dass ich mir bislang noch gar keine
Gedanken dazu gemacht habe, wie oft das Display aufgerufen wird und wie
oft der Code in der Main aufgerufen wird. Erstmal wäre gut zu wissen,
was für eine Bildrate eingestellt ist.
Und wie realisiere ich das, wie oft ein Code in der Main aufgerufen
werden soll? Dafür muss ich mich wahrscheinlich über Timer informieren
und dann vor den Code eine If Bedingung mit einer Timing Variablen
machen und immer wenn der Timer die Variable setzt, dann erst den Code
ausführen? (So wie du das in deiner Main gemacht hast). Aktuell wird der
Code ja einfach wahrscheinlich mit den 120 MHz abgearbeitet und das ist
ja viel schneller als die Bildrate...
Vladislav N. schrieb:> Ich habe mal den Code und nachvollzogen und dort wird eine externe> Quelle als Taktversorgung eingesetzt(Weiß ich jetzt nicht, warum> Riverdi nicht den internen relaxation oscillator clock benutzt).
Naja, sie haben eben einen Quarz auf der Platine und mit diesem ist der
Takt etwas stabiler.
Vladislav N. schrieb:> Da sie nicht benutzt wurde, gehe ich mal davon aus, dass der Systemtakt> 60 MHz ist.>> In das Register REG_PCLK schreiben Sie in der Initialisierung den Wert 2> rein, also denke ich mal, dass PCLK 30 MHz ist.
Gut, das passt.
Vladislav N. schrieb:>> Die Bildrate beträgt also so 65 Hz oder 54 Hz.>> Wie hast du die Bildrate berechnet?
30MHz / (1056 * 525) = 54,112554
Du hast bei Dir in der Formel noch 24 Bit Auflösung mit drin gehabt.
Die Daten werden allerdings parallel übertragen, nicht seriell.
Vladislav N. schrieb:>> Meine Software aktualisiert das alle 20 ms.>> In welchem Teil deiner Library kann man das sehen, wie du das> eingestellt hast?
In gar keinem, das ist Teil meiner Anwendung.
Die beiden Beispiele die ich auf Github habe machen das.
In dem ATSAMC21 Beispiel wird der Systick-Timer für einen 5 ms Interrupt
verwendet damit die Hauptschleife nur alle 5 ms durchlaufen wird.
Und alle vier Durchläufe wird TFT_display() aufgerufen.
In dem Arduino Beispiel mache ich das gleiche, nur benutze ich da
millis() um die Hauptschleife nur alle 5 ms auszuführen.
https://github.com/RudolphRiedel/FT800-FT813/blob/4.x/example_projects/EVE_Test_SAMC21_FT813_EVE2-35G/main.cVladislav N. schrieb:> Woher hast du die Info, dass er langsamer als 11 MHz sein muss? Also du> meinst bei der Initialisierung des Chips oder?
Ja, bei der Initialisierung des Chips.
Und das ist eine interessante Frage.
Im "FT800 Programmers Guide.pdf" steht noch im Kapitel 2.2.5: "Use MCU
SPI clock not more than 11MHz".
Und im Kapitel 4.2.3 vom "DS_FT800.pdf" steht:
"If SPI is used as host interface, the SPI clock shall not exceed 11MHz
before system clock is
enabled. After system clock is properly enabled, the SPI clock is
allowed to go up to 30MHz."
Im Datenblatt vom FT81x findet sich das nicht mehr.
Im "FT81X_Series_Programmer_Guide_1.2.pdf" steht das im Kapitel 2.3 auch
nicht mehr explizit drin, das Beispiel hat aber noch die Zeilen dafür.
Und im Kapitel 2.4 vom
"BRT_AN_033_BT81X_Series_Programming_Guide_1.1.pdf" taucht nicht mal
mehr das auf.
Hmm, interessant, sich daran zu halten ist jetzt nicht in dem Sinne
falsch, aber scheinbar schon seit den FT81x so nicht mehr notwendig.
Das habe ich gerade mal ausprobiert.
Bis 17 MHz SPI Takt hoch kann ich den BT815 starten lassen.
Da drüber klappt es aber nur nicht mehr so richtig, weil ich noch ein
Problem mit dem MISO habe und dann nur noch Murks über die Leitung
kommt.
Mit 17MHz SPI Takt bleiben die X/Y Koordinaten auch nicht fest auf
32768, da sind ständig Bit-Kipper drin.
Vladislav N. schrieb:> Es wird wohl bestimmt daran liegen, dass ich mir bislang noch gar keine> Gedanken dazu gemacht habe, wie oft das Display aufgerufen wird und wie> oft der Code in der Main aufgerufen wird. Erstmal wäre gut zu wissen,> was für eine Bildrate eingestellt ist.
(Sytem-Clock / PCLK) / (HCYLCE * VCYCLE)
Wobei man PCLK sinnigerweise so einstellt das sich in etwa 60 Hz
ergeben.
Und nachdem ich das gerade in meine Excel-Tabelle für die
Display-Parameter eingegeben habe, sollte ich vielleicht noch ein paar
Parameter anpassen, da gerade viele von den kleinen Displays da deutlich
drüber liegen.
Das EVE3-43G etwa das ich gerade benutze hat wie alle anderen 4.3" bei
mir eine Einstellung von PCLK = 5, mit den 72MHz von dem BT815 macht das
90Hz.
Ein PCLK = 7 und entsprechend 64 Hz wären sinnvoller.
Was man daran auch schön erkennen kann, die Framerate wird mit höheren
Auflösungen zunehmend zum Problem, zumindest bis einschliesslich BT816.
Unter 2 sollte man gar nicht gehen, da EVE sonst Probleme bekommt die
Pixel auch noch zu erzeugen.
Aber wenn man so eines wie das ADAM101 mit 1024x600 hat bei VCYCLE = 720
und HCYCLE = 1100, da kommt man mit PCLK = 2 und den maximal 60 MHz des
darauf verbauten FT813 eben nur auf 38 Bilder pro Sekunde.
Hätte das einen BT815 käme man wenigstens auf 45 FPS.
Deshalb gibt es auch (noch) keine EVE Displays mit etwa 1280x800.
Hallo,
ich habe mich mal einbisschen recherchiert über die Möglichkeiten die
man mit EVE hat. Dabei bin ich auf das Beispiel 4 von dieser Seite
gestoßen:
https://www.ftdichip.com/Support/SoftwareExamples/FT800_Projects.htm
So eine Anzeige wäre ziemlich cool für meine Endanwendung.
Natürlich gibt es den Code zu diesen Beispielen aber nur für andere
Zielplattformen. Das Application Layer und das EVE Layer sind aber
nahezu identisch wie auch in der Riverdi Bibliothek.
Ich habe versucht, den Code von der Datei "App_Gauges.c" in mein Projekt
zu integrieren. Kompilieren hat dann auch geklappt, jedoch funktioniert
die Anwendung leider nicht auf meinem Display.
Erst habe ich die Variable prog_uchar8_t digits[] aus "App_Gauges.c" nur
in uchar8_t geändert. Denn in deren "platform.h" war das hier zu finden:
#define prog_uchar8_t uchar8_t
Keine Ahnung, warum die das gemacht haben aber das sollte ja nicht das
Problem sein.
Die hatten in Ihrer Bibliothek noch die Funktion
Gpu_Hal_WrCmdBufFromFlash(...) drinne, welche ich auch einfach noch in
meine Gpu_hal.c hinzugefügt habe.
Außerdem waren in deren Hal.utils.c noch folgende defines die ich
hinzugefügt habe:
#define pgm_read_byte_near(x) (*(x))
#define pgm_read_byte(x) (*(x))
#define random(x) (rand() % (x))
Wenn ich durch den Code debugge, dann hängt er sich irgendwann bei einem
Gpu_Hal_WaitCmdfifo_empty(phost); auf.
Vieleicht liegt es aber auch daran, dass ich mich bislang noch gar nicht
mit dem Flash Speicher des Riverdi beschäftigt habe, dieses Beispiel
aber offenbar auch was mit Flash zu tun hat (wegen der Funktion
Gpu_Hal_WrCmdBufFromFlash ). Das ist der Code der Funktion:
void Gpu_Hal_WrCmdBufFromFlash(Gpu_Hal_Context_t *host,uchar8_t
*buffer,uint32_t count)
uint32_t length =0, SizeTransfered = 0, getfreespace;
do {
length = count;
getfreespace = Gpu_Cmdfifo_Freespace(host);
if (length > getfreespace){
length = getfreespace;
}
Gpu_Hal_CheckCmdBuffer(host,length);
Gpu_Hal_StartCmdTransfer(host,GPU_WRITE,length);
SizeTransfered = 0;
while (length--) {
Gpu_Hal_Transfer8(host,pgm_read_byte_near(buffer));
buffer++;
SizeTransfered ++;
}
length = SizeTransfered;
Gpu_Hal_EndTransfer(host);
Gpu_Hal_Updatecmdfifo(host,length);
Gpu_Hal_WaitCmdfifo_empty(host);
count -= length;
}while (count > 0);
Aber hier ist ja als Flash dieses großen Zahlenarray aus "App_Gauges.c"
gemeint. Was nicht klar ist, warum Gpu_Hal_Transfer8 benuitzt wird (hier
erwartet man auch noch eine Antwort von der GPU die aber nirgendswo
gespeichert wird)
Dort ist auch noch eine Schriftartendatei "digits.fon" (siehe Anhang).
Aber ich habe nirgendswo in deren Code gesehen, wo Sie diese benutzen.
Weißt du, was man mit der machen muss?
Hast du ne Idee, wie man das Beispiel zum Laufen bringen könnte?
Noch ne andere Sache: Dieser EVE Screen Designer, bringt der mir
irgendwas wenn ich nicht eine von den supporteten Zielplattformen
benutze? Nach dem Anschauen des Guides habe ich eher festgestellt, dass
ich keinen Mehrwert erschließen kann, da ich ja nur den C-Code für
andere Platformen bekommen kann.
Im ESD sind zwei Widgets die evtl. auch für mich in Frage kommen könnten
(siehe die letzten beiden Anhänge). Aber diese findest man nicht im
Programmierguide. Weißt du, wie es mir möglich wäre, diese Widgets
einzubinden?
Der EVE Screen Editor hingegen kann mir helfen, da ich dort mal Sachen
ausprobieren könnte, ohne sie kompilen zu müssen.
Vladislav N. schrieb:> Hast du ne Idee, wie man das Beispiel zum Laufen bringen könnte?
Äh, so spontan nicht, habe ich noch nicht versucht.
Gpu_Hal_WrCmdBufFromFlash() hat aber nichts mit dem SPI-FLASH auf dem
Modul zu tun, das bezieht sich auf den Programm-Speicher vom Controller.
Sowas habe ich ja auch eingebaut, siehe oben, das stammt alles noch aus
der Zeit vor den BT81x.
Den EVE Screen Designer benutze ich auch nicht.
Ich hoffe im Moment das dem EVE Screen Editor mal ein Exporter für die
neue Library nach AN025 beigebracht wird, das ist dann schon mal viel
dichter an meinem eigenen Code dran.
Was die Widgets angeht, zumindest das erste ist als Beispiel enthalten
in dem aktuellen EVE Screen Editor.
Die Beispiele sind sowieso interessant, wenn auch etwas versteckt in dem
Installations-Ordner.
Hello,
yesterday evening I pushed a small update.
Among other things I marked the function EVE_get_touch_tag() as
deprecated.
If you using it you will get a warning that it is deprecated.
Just use EVE_memRead8(REG_TOUCH_TAG); instead.
Or EVE_memRead8(REG_TOUCH_TAG1); and so in case of multi-touch.
And make sure EVE is not busy when you use DMA:
1
void TFT_touch(void)
2
{
3
uint8_t tag;
4
static uint8_t toggle_lock = 0;
5
6
if(EVE_busy()) /* is EVE still processing the last display list? */
7
{
8
return;
9
}
10
11
tag = EVE_memRead8(REG_TOUCH_TAG); /* read the value for the first touch point */
12
13
switch(tag)
14
{
15
...
With the upcoming BT817 a couple more changes will be necessary.
The "#if defined (BT81X_ENABLE)" needs to be changed since BT817
obviously still is a BT81x and yet it is beyond BT815 with additional
registers.
Instead I am thinking about using "EVE2", "EVE3" and "EVE4".
EVE2 == FT81X_ENABLE
EVE3 == BT81X_ENABLE and EVE2 is to be set as well
EVE4 for BT817 with EVE3 and EVE2 to be set as well
Well, it may be time to make EVE2 base-line when the first BT817
displays are released.
Meaning to finally remove FT80x support, clean it up some more and call
it 5.x.
Simple Frage an erfahrene Fachleute! Mit lang erprobter Hardware und
Displays ab 4,3 Zoll (mind. 480x272) versuche ich nun schon seit Stunden
ein 3,5 Zoll Display mit 320x240 zum Laufen zu bringen. Display-Treiber:
FT813. Ist es möglich, dass dieser FT gar nicht für solche "kleinen"
Displays vorgesehen ist? Hat der außer der Ober- auch eine
Untergrenze???
Meine Erfahrungen zeigten, dass die Einstellungen der Register
HCYKLE HOFFSET HSYNC0 / HSYNC1 (und das Gleiche für V) recht
großzügig in bestimmten Bereichen verändert werden können, ohne dass es
sichtbare Auswirkungen hat.
Klar, HSIZE und VSIZE sollten wohl immer richtig sein (hier also 320 und
240).
Zum Laufen bringen: Damit meine ich das Display einfach nur vollflächig
mit einer Farbe beschreiben...
Je nach Einstellungen (an denen ich wie gesagt, nun schon seit Stunden
probiere) habe ich angefangen von gar kein Bild bis zu halben/über Eck,
flackernd die Hälfte, mit weißen Balken mal hier und da na usw...
Schließe ich einfach mal ein 480x272 an, habe ich ein grünes Bild (die
Farbe, die es sein soll!) in der Größe 320x240 und weißem Balken
unterhalb und "Farbschrott" rechts, was der Bereich > 320x240 ist!
Wo ist der Denkfehler?
Bernd
Ich bin mit dem "niedlichen Platinchen" (siehe 18.1. diesen Jahres)
unterwegs, also einfach nur den FT813, den ich per SPI bediene, so wie
zuvor mit allen anderen Displays. Das 3,5' ist jetzt Premiere - und
klappt nicht. Anbei das Datenblatt des Display. ACTRON, die mit dem
einheitlichen 50-poligen Anschluss, weshalb ich einfach mal von einem
Display zum anderen Wechseln kann.
Seite 18 findest Du die entsprechenden Timings für dieses Display.
Kannst Du mir bitte, bitte sagen, welche Werte für HCYKLE HOFFSET
HSYNC0 / HSYNC1 (und V....) dafür erforderlich sind?!
REG_HSIZE = 320
REG_VSIZE = 240
Werte in Klammern dahinter, was ich schon alles u.a. probiert habe
REG_HCYCLE: 408 - 450 ???
REG_HOFFSET ? (40)
REG_SYNCO ? (20, 40, 0)
REG_SYNC1 ? (68, 48, 2, 1)
REG_VCYCLE: 262 - 350 ???
REG_VOFFSET ? (40, 30, 22
REG_VSYNC0 ? (10, 1 , 0)
REG_VSYNC1 ? (40, 18, 10)
REG_PCLK habe ich auch schon mal hochgesetzt (also Takt runter), derzeit
auf 10, also 4,5MHz... Alles egal! Nur bei REG_PCLK = 1 geht nichts mehr
(48 MHz), ab 2 geht es. Oder liege ich da falsch? Ich betreibe den FT813
mit 12MHz-Quarz, also durch PLL 48Mhz. Wie hoch ist dann PCLK, wenn
REG_PCLK = 1 ist? 48 oder 12 MHz (FOSC / 4) ???
Angebot "niedliches Platinchen" steht noch - wenn Du es brauchst!
Nun ist mir noch etwas aufgefallen:
Im Datenblatt des Display 3,5' sind die Impulse (HSYNC / VSYNC) Positiv
im Diagramm gezeichnet, während sie bei allen anderen (bisher von mir
verwendeten) stets negativ sind und so auch im
FT813-Programmieranweisung (s.28) aufgeführt sind, also auch negativ.
Außer die Polarität des Clock (mit REG_PCLK_POL) kann man aber die H-
und V-Sync-Ausgänge nicht negieren. (?). Müsste man nun also die ganzen
Zeiten (Anzahl CLK, Anzahl Lines) so umrechnen, dass sich eben die
positiven Werte ergeben. Hattest Du so was schon mal?
Okay, das ist also schon mal ein FT813.
Ist jetzt nicht so, als hätte ich mich damit schon oft herum schlagen
müssen, normalerweise habe ich ja die Daten von den Modul-Herstellern.
Das Beste an den Timings ist ja, jeder Hersteller gibt das ein klein
wenig anders an, mal ist der Buchstabensalat anders, mal fehlen auf den
ersten Blick Werte.
Probier das mal:
#define EVE_HSIZE (320L)
#define EVE_VSIZE (240L)
#define EVE_VSYNC0 (0L)
#define EVE_VSYNC1 (4L)
#define EVE_VOFFSET (22L)
#define EVE_VCYCLE (262L)
#define EVE_HSYNC0 (0L)
#define EVE_HSYNC1 (20L)
#define EVE_HOFFSET (88L)
#define EVE_HCYCLE (408L)
#define EVE_PCLKPOL (1L)
#define EVE_PCLK (9L)
Die Clock-Polarität sagt ja nur, ob das nun auf die fallende oder auf
die steigende Flanke zu beziehen ist.
Und nach dem Datenblatt ist es die fallende Flanke und somit
REG_PCLK_POL=1.
Bernd Ickert schrieb:> Ich betreibe den FT813 mit 12MHz-Quarz, also durch PLL 48Mhz.
Der hat aber per Default 60MHz, da muss man sich schon ein wenig Mühe
geben den auf 48MHz runter zu bekommen. :-)
Vielen Dank für die Daten! Das sind ja genau die, die lt. Datenblatt
richtig sein sollten und mit denen ich (Plus/Minus) schon in allen
Richtungen experimentiert hatte. Ich habe jetzt bei ACTRON ein neues
geordert, um auszuschließen, ob es sich nicht doch um ein
"Montags-"Display handelt. Wenn sich ein neues Display genauso verhält,
wie dieses, na dann geht's weiter...
Ich betreibe den FT mit einem separaten Quarz 12MHz, so wie es im
Datenblatt des FT813 in "Application Examples" vorgegeben ist. Was der
FT dann mit dieser Frequenz noch macht, weiß ich (nicht) mehr. Ich
meinte, mal gelesen zu haben, dass mit Hilfe der inneren PLL daraus dann
48 MHz gemacht werden (beim PIC ist es jedenfalls so - einstellbar).
Aber natürlich auch möglich, dass durch "Mal 5" - PLL daraus 60Mhz
werden...
Ich melde mich wieder - Eine schöne Woche
Da haben wir (wahrscheinlich) das Problem. Nach Rücksprache mit ACRON
mit einem sehr kompetenten Techniker (hat man selten bei
Display-Lieferanten!!!) liegt das Problem an der DE-Polarität. Autor der
beigefügten AppNote ist auch der, mit dem ich eben sprach. Auf Seite 10
siehst Du in der Tabelle letzte Spalte von Unten das Aktive low für den
DE, während alle anderen Aktive High sind. Und das kann der FT8xx nicht.
Da das Problem bekannt ist, haben sie da schon was in petto und ich
bekomme ein äquivalentes Display.
Dieses Muster kann ich aber auch noch durch Umlöten eines Widerstandes
trotzdem verwenden. Anleitung dazu erhalte ich heute noch. Na dann mal
sehen!!!
Doch, ja, ich bin mit den fertigen Modulen immer noch ganz glücklich
soweit. :-)
Und ich bin schon gespannt was Matrix Orbital feines mit den BT817 raus
bringen wird für EVE4.
Ich hoffe da auf ein EVE4-100G mit 10.1" und 1280x800. :-)
Bernd Ickert schrieb:> Ich betreibe den FT mit einem separaten Quarz 12MHz, so wie es im> Datenblatt des FT813 in "Application Examples" vorgegeben ist. Was der> FT dann mit dieser Frequenz noch macht, weiß ich (nicht) mehr. Ich> meinte, mal gelesen zu haben, dass mit Hilfe der inneren PLL daraus dann> 48 MHz gemacht werden (beim PIC ist es jedenfalls so - einstellbar).> Aber natürlich auch möglich, dass durch "Mal 5" - PLL daraus 60Mhz> werden...
Das ist korrekt soweit, der Takt wird per PLL aus den 12MHz erzeugt.
Aber das mit den 48MHz war bei den FT80x der Fall, bei den FT81x waren
das schon per Default 60MHz.
Bei den BT81x sind es per Default auch erstmal 60MHz, die lassen sich
aber auf 72MHz hoch stellen - was meine Library auch macht.
Rudolph schrieb:> Doch, ja, ich bin mit den fertigen Modulen immer noch ganz glücklich> soweit. :-)> Und ich bin schon gespannt was Matrix Orbital feines mit den BT817 raus> bringen wird für EVE4.> Ich hoffe da auf ein EVE4-100G mit 10.1" und 1280x800. :-)
Ich warte seit Februar auf Muster vom BT817. Ich brauche den für eine
Neuentwicklung wo ein Display mit 1024x600 gefordert wird.
Seltsamerweise ist auf der Bridgetek-Seite jetzt wieder jeder Hinweis
verschwunden, während der embedded war dort noch die Ankündigung. Weiß
jemand wo die bei bridgetek dafür Zuständige Abteilung sitzt ? Ist das
in UK oder Singapore ? Dürfen die noch arbeiten ?
Ich hatte jetzt auch schon länger keinen direkten Kontakt mehr zum
Support, aber das Forum läuft ja noch und das geht nur moderiert.
Eigentlich ja, dafür das im Februar der Release sein sollte sind die
Informationen immer noch recht dünn.
So wie ich das verstehe, muss nicht stimmen, läuft das schon
international.
Support auf jeden Fall aus UK.
Was die Entwicklung mit dem BT817 und dem 1024x600 Display angeht,
so wie ich das verstehe, kannst Du das im Grunde mit einem BT815
anfangen.
Die dürften ziemlich kompatibel werden.
Die BT817 sind dann nachher schneller und erlauben eine höhere Bildrate.
Aber um das LVDS Interface kommt man wohl nicht herum, es sei denn
Bridgetek nutzt die Zeit um den BT817 nach den Ankündigungen über das
eine Bild zur Embedded World noch mal zu überarbeiten.
Meine letzten Informationen sind von Anfang März.
Das ADAM101 von Glyn ist übrigens ein 10.1" mit FT813 und 1024x600.
Da ist ein LVDS Chip drauf.
Der FT813 ist meiner Meinung nach mit dem Display aber ein klein wenig
überfordert.
Edit: es gibt einen neuen EVE Asset Builder V1.4:
https://brtchip.com/eve-toolchains/#EVEAssetBuilder
Unter anderem sollen die UTF-8 Probleme gefixt sein.
Rudolph R. schrieb:> Edit: es gibt einen neuen EVE Asset Builder V1.4:> https://brtchip.com/eve-toolchains/#EVEAssetBuilder>> Unter anderem sollen die UTF-8 Probleme gefixt sein.
Ist mir auch schon aufgefallen und teste seit gestern. Habe die gleichen
Tests gemacht wie bereits vor einigen Wochen beschrieben, aber das
Problem ist unverändert da. Werde bei Bridgetek mal nach einem
ESE-Beispiel inkl. Flashdaten fragen, mit dem es funktionieren soll.
Was mich ein wenig wundert ist die Größe der Dateien.
Ich habe gestern noch mal eine gestrippte Version von dem
notosans-regular auf 100 Punkte konvertiert.
notosans-regular-webfont_100_ASTC.glyph 3272kB
Okay, warum nicht, ist ja auch Mordsgroß.
Nur wenn ich diese Datei in eine .zip packe, dann schrumpft das zu 74kB.
Okay, der Font hat 222 Glyphen.
Also mal ein einzelnes Zeichen testen.
"1": 40kB - 581 Bytes als .zip
".": 8kB - 337 Bytes als .zip
"a": 96kB - 924 Bytes als .zip
So schlecht kann ASTC doch eigentlich gar nicht komprimieren?
Dazu die Release-Notes:
V1.4.0:
- Fix bugs:
+ The UTF-8 code point 0xF09FA183 (i.e. 0x1F843 for unicode)
cannot be displayed
+ The glyph file is not compressed when the code point is in UTF-8
+ eab_tools.exe will not run on a fresh 64-bit Win10 machine
+ Image conversion fail if current output folder does not exist
- Add the "Verify" function in flash utility
- Recognize UTF8-BOM and remove it before converting
- Speed up generating font when code point mode is UTF-8
- Replace 'numpy' by 'tinynumpy' to reduce distribution package size
Irgendwie sieht das danach aus als wäre bei der 1.4.0 nicht der
Font-Converter für die 1.4.0 dabei.
Edit: "eab_tools font_convert -v" : EVE Font Conversion Utility V0.1.6
Mit der 1.4.0 habe ich exakt das gleiche wie mit der 1.2.0.
Rudolph R. schrieb:> Das ADAM101 von Glyn ist übrigens ein 10.1" mit FT813 und 1024x600.> Da ist ein LVDS Chip drauf.> Der FT813 ist meiner Meinung nach mit dem Display aber ein klein wenig> überfordert.
Danke, das kannte ich noch nicht. Im Datenblatt des BT815/FT813 steht
eigentlich eine maximale Auflösung von 800x600, aber scheinbar geht dann
ja auch mehr.
Wieso meinst du, dass man dann unbedingt LVDS braucht ? Das Display das
ich anstrebe gibt es auch mit TTL Interface. Müsste das dann nicht
direkt gehen ?
Noch einen LVDS-Transmitter dazu bauen wäre aber auch kein Problem.
Mike T. schrieb:> Danke, das kannte ich noch nicht. Im Datenblatt des BT815/FT813 steht> eigentlich eine maximale Auflösung von 800x600, aber scheinbar geht dann> ja auch mehr.
Das Maximum sind so theorethische 4096x4096 oder so.
Ist aber uninteressant, das Problem sind nicht die Pixel an sich.
Sondern der Pixel-Takt und dass das Bild ja auch noch erzeugt werden
muss.
Mit dem ADAM101 lag ich glaube ich bei um 30 Bilder pro Sekunde.
> Wieso meinst du, dass man dann unbedingt LVDS braucht?
Na, unbedingt nicht, aber jenseits von 800x600 wird die Auswahl an
Panels mit TTL Interfaces echt dünn.
Und LVDS stirbt auch schon wieder, MIPI DSI ist angesagt.
> Das Display das ich anstrebe gibt es auch mit TTL Interface.> Müsste das dann nicht direkt gehen ?
Doch, das geht natürlich.
> Noch einen LVDS-Transmitter dazu bauen wäre aber auch kein Problem.
Das ist ganz schön hässlich im Layout, vor allem auch da die Signale
vergleichsweise schnell sind.
Rudolph R. schrieb:> Das ist ganz schön hässlich im Layout, vor allem auch da die Signale> vergleichsweise schnell sind.
Da muss man auf die richtige Impedanz (100Ohm differenziell, 50 Ohm
single ended) und gleiche Länge der einzelnen Leitungen achten, dann
geht das schon. Dafür sind es auch nur 4 oder 5 Leitungspaare also 10
Leitungen und nicht 27. Hab ich schon oft gemach, funktioniert wenn mans
richtig macht.
Klar, geht das, keine Frage.
Und ich meinte jetzt auch mehr die andere Seite, also das TTL Interface
an den LVDS Chip anzuklemmen.
Ich habe noch keinen LVDS Chip gesehen bei dem das einfach wäre, so mit
TTL auf der einen Seite und LVDS+Versorgung auf der anderen Seite.
Irgendwie muss man immer 1/3 der Leitungen um den Chip herum wickeln.
Naja, ich werde sowas auch weiterhin nicht versuchen.
Gestern habe ich mal wieder nach Displays gefischt.
Über 800x600 und/oder über 7" gibt es praktisch nur welche mit LVDS.
Mit MIPI DSI habe ich jetzt gar nicht so viele gesehen.
Dann habe ich mit dem WF101FSYAPLNG0 ein nettes Teil gefunden mit dem
man mal herum spielen könnte, nur kaufen kann man sowas dann natürlich
nicht.
Aber naja, gibt eh kein richtiges Datenblatt einfach so frei dafür und
der Aufwand dafür eine Platine zu machen steht auch in keinem Verhältnis
zu dem Nutzen den ich davon hätte.
Das Spiel macht ohne Stückzahlen einfach keinen Spaß.
Gestern habe ich versucht, ein Bild anzeigen zu lassen.
Habe es zuerst mit dem "EVE Asset Builder" in ein ARGB1555 umwandeln
lassen. Angezeigt wurde nur ein gelbes Rechteck (foreground colour).
Dann habe ich es mit ARGB4 versucht- gleiches Ergebnis. Bildgröße war
200 x 130. Dann habe ich eine andere Datei genommen, auf ARGB4 gewandelt
und als 108 x 123 angezeigt. Das hat funktioniert.
Erst als ich das Ursprungsbild auf 50 x 33 verkleinert hatte, konnte ich
es (als ARGB4) anzeigen. Ich hänge das Ursprungsbild mal an.
Gibt es da irgendwelche Größenbeschränkungen?
Zum Anzeigen habe ich aus Deinem Beispiel verwendet:
FT8_cmd_dl(DL_BEGIN | FT8_BITMAPS);
FT8_cmd_setbitmap(MEM_WOLKE, FT8_ARGB4, 50, 33);
FT8_cmd_dl(VERTEX2F(240*16, 10*16));
Muß man hier irgendwie mit den Farben im Ursprungsbild aufpassen?
Danke,
Gruß Axel
Oh, ich glaube ich hab's. Da war ganz am Anfang des Beitrags was von
4k-Grenze zu lesen. An welcher Stelle ist die zu finden bzw. wodurch
besteht diese Grenze?
Gruß Axel
Ich habe das gerade mal in meinen Test-Code eingebaut und ich habe
soweit keine Probleme mit der Anzeige in 200x130.
Das erste ist ARGB4, das zweite ist ARGB1555 und das dritte ist direkt
als .jpg verwendet und entsprechend als RGB565 angezeigt.
Ach ja, das ist ein EVE3-50G.
Die Bilder habe ich mit dem EVE Asset Converter Builder 1.4.0
konvertiert aus der hier angehängten Original Datei.
Option "Compressed" an und "Dithering" aus.
ARGB4: 5925 Bytes
ARGB1555: 9665 Bytes
Zwei Sachen sind mir aufgefallen.
Zum einen das oben angehängt Bild, das ist komplett "verseucht" mit
Meta-Daten.
Wenn ich das in IrfanView aufmache wird mir angezeigt: JPEG, quality:
90, subsampling ON (2x2)
Also habe das ohne Meta-Daten und mit 90% Kompression wieder
gespeichert.
JPG: 5190 Bytes
Entweder ist die Angabe zur Kompression in der Original-Datei gelogen,
oder da stecken wirklich über 40KiB Daten in der Datei die nichts mit
dem Bild zu tun haben.
Ich habe das nicht nachgezählt, aber wenn man die Datei mit einem
Hex-Editor aufmacht ist da Text drin ohne Ende.
Oh ja, schöner Test, packt man die Original-Datei in eine .zip, so hat
das Archiv dann 17053 Bytes.
Packe ich die neue Datei in eine .zip werden das 5222 Bytes.
Zum anderen benutzt Du irgendeinen alten Stand aus 2018.
Axel V. schrieb:> Da war ganz am Anfang des Beitrags was von> 4k-Grenze zu lesen. An welcher Stelle ist die zu finden bzw. wodurch> besteht diese Grenze?
Das Problem besteht seit FT8_Commands.c Version 3.10 nicht mehr, also
für cmd_inflate, für cmd_loadimage seit Version 2.7.
Die Ursache war, dass der Kommando-FIFO eben nur 4k groß ist und die
Lösung war die Daten in Häppchen zu verschicken die kleiner als 4k groß
sind.
Aus dem Grund ist in dem Zuge auch dazu gekommen, dass cmd_inflate nicht
mehr "von Hand" ausgeführt werden muss, jedes Segment erfordert sowieso
schon die Ausführung.
Aber ich bin mir gerade nicht mal sicher, ob in so einem Fall überhaupt
was angezeigt worden wäre.
A little heads up, 5.0 will remove FT80x support.
But 5.0 will also support BT817/BT818 and since I do not even have a
programming manual for EVE4 yet, do not hold your breath. :-)
Hallo Rudolph,
haben die BT81X Chips Probleme dabei, große Grafiken darzustellen?
500x193 Pixel hat bei mir noch funktioniert. Aber bei 700x212 oder auch
600x232 Pixel da wurde nur noch ein kleiner Teil des Logos dargestellt.
Mein aktuelles Vorgehen ist es, erst den Hintergrund des Logos zu
entfernen und anschließend mit dem EVE Asset Builder zu komprimieren.
Das Datenarray des komprimierten Logos speichere ich dann im Quellcode.
Zur Übertragung des Arrays in RAM_G des Grafikcontroller nutze ich den
inflate-Befehl. Dann sieht dann in etwa so aus:
....
Gpu_Hal_WrCmd32(phost, CMD_INFLATE);
Gpu_Hal_WrCmd32(phost, 0);
Gpu_Hal_WrCmdBufFromFlash(phost,Logo_compressed, SIZE_COMPRESSED);
Gibt es eine Möglichkeit, größere Grafiken darzustellen?
Viele Grüße
Vladi
Zufällig habe ich am Freitag erst mit größeren Bilder was ausprobiert.
Da ging es zwar darum ob der BT815 ASTC komprimierte Bilder aus dem
RAM_G benutzen kann, dafür habe ich aber ein 1400x792 Bild auf ASTC 8x8
komprimiert.
Das hat per zlib komprimiert 267664 Bytes und per cmd_inflate() entpackt
sind es 277200 Bytes.
Das Bild ist übel chaotisch, soll glaube ich Kunst sein, im Grunde eine
Farb-Explosion die in Kacheln zerlegt wurde welche zufällig verteilt
sind.
Egal, ich habe mir eben bewusst ein Bild gesucht das schlecht
komprimierbar ist.
Und das klappt ohne Probleme.
Selbst rotierend und gleichzeitig gezoomt.
Ach ja, das ist auf einem EVE3-50G, also mit 800x480.
Also dachte ich mir gerade mal so, machen wir EVE doch ein wenig Stress.
:-)
https://www.nasa.gov/multimedia/imagegallery/image_feature_329.html
Okay, das Bild hat 3000x3000, das bekomme ich weder in den Speicher,
noch dürfte der BT815 das anzeigen, weil das Limit meine ich so bei
2048x2048 liegt.
Also habe ich erstmal den Rand etwas abgeschnitten und das dann in
mehreren Stufen verkleinert bis ich endlich eine Datei hatte die in
meinen ATSAME51J19A passt - der hat "nur" 512k FLASH. :-)
Bei 1440x1440 sind das 484178 Bytes als ASTC 8x8 und "compressed",
514800 Bytes im RAM_G nach cmd_inflate().
Funktioniert auch einwandfrei, sogar rotierend und mit Faktor 1,567
vergrößert. :-)
Also an dem BT815 liegt es nicht.
Und meine Library macht das auch einfach so mit:
https://github.com/RudolphRiedel/FT800-FT813
Wobei ich ja zugeben muss, ich habe am Freitag die Parameter für die
Länge der Daten bei cmd_inflate(), cmd_loadimage() usw. von uin16_t auf
uint32_t angehoben.
Das sieht bei mir im Kern so aus:
Rudolph R. schrieb:
weil das Limit meine ich so bei
> 2048x2048 liegt.> [/code]
Ok, jetzt bist du einen Anfänger eine Erklärung schuldig :D
Wie kann man denn Bilder mit 2048x2048 Pixeln oder so auf einem Display
anzeigen, welcher nur eine Auflösung von 800 x 480 Pixeln hat?
Ich dachte, meine Bilder müssen kleiner als die 800x480 Pixel sein...
Klar, komplett anzeigen ohne das zu verkleinern geht natürlich nicht
größer als die Auflösung des Displays ist.
Aber da die Koordinaten von VERTEX2F mit Vorzeichen sind kann man einen
beliebigen Ausschnitt aus dem Bild anzeigen.
Die Frage war ja, ob die BT81x mit großen Bildern klar kommen.
Und die Antwort ist, dass die sogar mit übertrieben großen Bildern kein
Problem haben. :-)
Was natürlich nicht geht ist ein .jpg mit 1024x600 zu laden, nach
cmd_loadimage() ist das schlicht größer als die 1MB RAM_G.
Aber in ASTC bekommt man sogar mehrere 800x480 Bilder gleichzeitig in
das RAM_G.
Moin,
benutzt du eigentlich SPI oder QSPI zur Kommunikation mit dem Display?
Ich mache gerade komischerwiese die Erfahrung, dass das Programm mit
QSPI sehr instabil ist und sich schnell aufhängt, nachdem ich paar
Nachrichten gesendet habe. Mit single SPI läuft alles perfekt. Kannst du
dir das erklären? Am Code kanns wohl nicht liegen, da ich einfach die
Bridgetek Bibliothek für den FT900 mC benutze.
Viele Grüße
Vladi
Ich benutze rein SPI, QSPI habe ich bisher nicht mal ernsthaft in
Erwägung gezogen.
Die einzige Verwendung die mir dafür einfällt wären Videos.
Bei den HMIs die ich mache müssen für das Display-Update alle 20ms so
<2k übertragen werden, bei 4MHz SPI dauert das so 4ms.
Und mit DMA sind das 4ms in denen der Controller nicht mal beschäftigt
ist.
Beim Startup könnte QSPI noch helfen wenn man viele Bilder zu kopieren
hat.
Mein letzter Test war ein 4xxk Bild im ASTC Format anzuzeigen,
das beim Start zu übertragen hat ein wenig länger gedauert.
Nur mache ich Projekte vorzugsweise nur noch mit BT815 und entsprechend
externem FLASH.
Entsprechend habe ich auch noch nicht versucht eine Platine für QSPI zu
designen, obwohl ich mit dem ATSAME51J19 zum Beispiel einen Controller
einsetze der ein QSPI Interface hätte.
Falls die Info mal jemand benötigt :
Ich habe das ER-TFT101-1, ein günstiges 10,1" TFT mit 1024x600 und
TTL-Schnittstelle von buydisplay.com an einem BT816 zum Laufen bekommen.
Da im Datenblatt keine Angaben zum Timing stehen habe ich ne ganze Weile
rumprobieren müssen. Hier sind die Displayeinstellungen die am Ende
funktioniert haben ;
wr32(REG_HCYCLE, 1232);
wr32(REG_HOFFSET, 159);
wr32(REG_HSIZE, 1024);
wr32(REG_HSYNC0, 0);
wr32(REG_HSYNC1, 1);
wr32(REG_VCYCLE, 680);
wr32(REG_VOFFSET, 23);
wr32(REG_VSIZE, 600);
wr32(REG_VSYNC0, 0);
wr32(REG_VSYNC1, 1);
wr32(REG_DITHER, 1);
wr32(REG_PCLK_POL, 1);
wr32(REG_PCLK, 2);//5
wr32(REG_ROTATE, 0);
wr32(REG_SWIZZLE, 0);
Vielleicht spart das ja jemandem ein bisschen Zeit.
Danke, das ist interessant.
Auch wenn ich dafür eher keine Platine bauen werde.
Die Timing Werte erscheinen mir (wie gewohnt) seltsam zu sein, auch die
Werte aus den Arduino Beispielen auf BuyDisplay.com:
#define HPW 70
#define HND 160
#define HDW 1024
#define HST 160
#define VPW 10
#define VND 23
#define VDH 600
#define VST 12
#define SCREEN_WIDTH 1024
#define SCREEN_HEIGHT 600
Das schon echt zum Schreien, macht man drei Datenblätter auf, selbst vom
geichen Hersteller, bekommt man drei unterschiedliche Datensätze die auf
verschiedene Art unvollständig sind.
Deine Timing Werte ergeben mit dem BT816 auf 72MHz übrigens 42,97 Hz.
Rudolph R. schrieb:> Bei den HMIs die ich mache müssen für das Display-Update alle 20ms so> <2k übertragen werden, bei 4MHz SPI dauert das so 4ms.> Und mit DMA sind das 4ms in denen der Controller nicht mal beschäftigt> ist.
Wie kann man das berechnen mit den 4 ms?
Mit t = Datenmenge/Datenrate komme ich nicht auf den Wert
Ahh klar, das war nicht so schwierig. :D
Was hat das für einen Grund, dass dein SPI auf 4 MHz läuft, wobei 30 MHz
möglich sind?
Hast du einen Tipp, wie man herausfinden kann, wie viele Daten bei jedem
Neuladen des Bildes an das Display gesendet werden?
Ich habe jetzt mal den Code genommen und alle DL- und CMD-Befehle
gezählt und komme bei der GUI im Anhang auf 372 Byte.
Muss ich da noch etwas beachten? (Klar, wenn ich Bilder einfüge, dann
muss ich deren Speicherbedarf auch noch addieren)
Kann ich irgendwie herausfinden, wie groß meine Display Liste am Ende
ist?
Und wird bei EVE eigentlich immer das gleiche Bild nochmal gezeichnet?
Gibt es dort keinen Mechanismus, der das effektiver gestaltet, wie zum
Beispiel Differenzkodierung? Also dass nur die Parts neu gezeichnet
werden, die sich auch wirklich ändern?
Vladislav N. schrieb:> Was hat das für einen Grund, dass dein SPI auf 4 MHz läuft, wobei 30 MHz> möglich sind?
Das war nur ein Rechenbeispiel, war wohl nur nicht ganz ausführlich
genug.
Meine Software ist gerade so aufgebaut das ich alle 5ms den Touch polle
und alle 20ms das Display aktualisiere.
Die main.c im meinen Beispielen zeigt die Details.
Die Test-Funktion testet ob das Display noch beschäftigt ist, die Update
Funktion nicht.
Also um nicht einen Touch-Poll zu überspringen muss das Update in
weniger als 5ms durch sein, daher die 4ms.
Die 2k sind auch eher ein Phantasie-Wert, beim letzten richtigen Projekt
hatte ich deutlich weniger als das.
Die Frage war nach QSPI, meine Antwort war das ich sebst bei single-SPI
mit nur 4MHz noch kein Problem hätte.
Mit den ATSAMC21 lasse ich den SPI bei 12MHz laufen, beim ATSAME51 bin
ich bei 15MHz.
Beim AVR habe ich 8MHz genutzt.
> Hast du einen Tipp, wie man herausfinden kann, wie viele Daten bei jedem> Neuladen des Bildes an das Display gesendet werden?> Kann ich irgendwie herausfinden, wie groß meine Display Liste am Ende> ist?
Meine Beispiel-Programme machen das.
Unten links werden vier Zahlen angezeigt.
Geschickte Bytes, die resultierende Länge der Display-Liste, wie lange
das Display-Update gedauert hat in micro-Sekunden und die wie lange die
Touch-Poll Funktion beschäftigt war.
Das habe ich beim Entwickeln einer Oberfläche immer irgendwo auf dem
Screen.
Die CMD-FIFO Liste sollte ja unter 4k bleiben, aber vor allem muss die
resultierende Display-Liste unter 8k bleiben.
> Und wird bei EVE eigentlich immer das gleiche Bild nochmal gezeichnet?> Gibt es dort keinen Mechanismus, der das effektiver gestaltet, wie zum> Beispiel Differenzkodierung? Also dass nur die Parts neu gezeichnet> werden, die sich auch wirklich ändern?
Man kann Display-Listen vorberechnen, per cmd_memcpy() irgendwohin in
RAM_G schieben und so ein Fragment dann beim Erzeugen der eigentichen
Display-Liste per cmd_append() einfügen.
Mein Beispiel zeigt auch das, es gibt eine Funktion
initStaticBackground() in welcher die statischen Elemente der Anzeige
drin sind, das ist im Fall des Beispiels ein Rechteck am oberen Rand,
ein Logo, eine schwarze Linie zum trennen und Text für die
Debug-Ausgabe.
Im dynamisch erzeugten Teil wird das per cmp_append mit eingeklinkt,
zusätzlich ein Button angezeigt, ein Bild das gedreht wird und die
Zahlenwerte für die Debug-Ausgabe.
Das könnte man auch noch weiter treiben und mit kleineren Blöcken machen
bei denen sich nur ein Detail verändert.
1
/* display a button */
2
EVE_cmd_dl(DL_COLOR_RGB | WHITE);
3
EVE_cmd_fgcolor(0x00c0c0c0); /* some grey */
4
EVE_cmd_dl(TAG(10)); /* assign tag-value '10' to the button that follows */
Das braucht 32 Bytes, ein cmd_append braucht nur 12 Bytes.
Und das einzige was sich da ändert ist der Wert von "toggle_state" und
auch nur mit zwei Werten.
Mit könnte also zwei Fragmente erzeugen und mit der Variable entscheiden
welche man anhängt, das wären dann 20 Bytes weniger pro Update.
Oder man lässt es, weil man die Daten sowieso per DMA überträgt. :-)
Oder man setzt sich ein Limit von z.B. 1ms die das alles dauern darf und
fängt erst mit trickreicheren Optimierungen an wenn man das reisst.
Da hört das auch noch nicht auf, was zum Beispiel auch was bringen kann
ist die Kommandos so zu sortieren das weniger redundante Kommandos
geschickt werden.
Wenn man zum Beispiel 16 Icons hat die rot grün oder blau sein können
macht es mehr Sinn drei Blöcke für rot grün und blau zu haben als für
jedes einzelne Icon die Farbe zu senden.
Das zieht zwar den Code im Controller auseinander, dafür hat man dann
aber nur noch drei Farb-Kommandos statt 16.
Ah ok, interessant :)
Rudolph R. schrieb:> Mit den ATSAMC21 lasse ich den SPI bei 12MHz laufen, beim ATSAME51 bin> ich bei 15MHz.> Beim AVR habe ich 8MHz genutzt.
wie kommen diese Werte zustande? Wie hast du ermittelt, dass sie am
optimalsten sind?
Ich habe stelle mir gerade die Frage, welche SPI-Frequenz ich verwenden
sollte. Ich muss MQTT-Daten (aktuelle Geschwindigkeit des Fahrzeugs) auf
dem Bildschirm darstellen. Aktuell habe ich einen Task, welcher alle 100
ms den MQTT-Buffer pollt und einen weiteren task, der alle 250 ms die
Funktion aufruft, welche das Display neu zeichnen lassen soll.
Eigentlich reicht es ja, die Fahrzeug-Daten 4 Mal pro Sekunde zu
aktuallisieren sodass sich der Geschwindigkeitsbalken in Echtzeit
aktuallisiert ^^
Nun habe ich berechnet, dass 30 MHz SPI 0,1 ms brauchen, um die
EVE-Daten zu übertragen. Mit 1 MHz SPI würde das ganze 3 ms dauern. Also
eigentlich könnte ich ja problemlos eine sehr geringe SPI Frequenz
nehmen.
Sollte ich das tun? Das hat doch dann den Vorteil, dass der Strom durch
das System geringer ist und dass das schonender für die Bauteile ist
oder? ^^
Oder hast du einen Rat, welche Frequenz ich nehmen sollte.
Letzten Endes ist es egal aber ich will auch ne schöne Argumentation in
meine Bachelor-Doku schreiben :D
Vladislav N. schrieb:>> Mit den ATSAMC21 lasse ich den SPI bei 12MHz laufen, beim ATSAME51 bin>> ich bei 15MHz.>> Beim AVR habe ich 8MHz genutzt.>> wie kommen diese Werte zustande? Wie hast du ermittelt, dass sie am> optimalsten sind?
Das sind nicht die "optimalsten" Werte, das sind die schnellsten Werte.
Beim AVR geht nicht mehr als 8MHz und da der kein DMA kann geht die
Datenübertragung voll mit ein in die Zeit für die Aktualisierung.
Der ATSAMC21 läuft mit 48MHz, hat nur eine PLL und die Frequenz wird
eingestellt mit der Formel: Clock / (2 * (BAUD + 1))
BAUD 0: 24MHz
BAUD 1: 12MHz
BAUD 2: 8MHz
BAUD 3: 6MHz
Bei 24MHz funktioniert nur der Touch nicht mehr mit meiner Hardware.
Ich vermute wegen der Laufzeit der Gatter die ich zwischen Controller
und Display habe.
Beim ATSAME51 ist es im Grunde das gleiche, nur füttere ich da (nicht
ganz nach Spec) 120MHz in den SPI und komme mit einem BAUD Wert von 3
auf 15MHz.
Bei einem Wert von 4 und entsprechend 20MHz funktioniert der Touch nicht
mehr.
Die Anzeige an sich ist auch mit viel schnellerem SPI stabil.
Benötigt wird das nicht wirklich und ich nutze mit beiden ATSAM DMA,
also könnte ich den SPI auch langsamer machen, etwa aus EMV Gründen.
Dazu noch die Flanken etwas runder durch andere Bestückung.
Nur mache ich keine Produkte in dem Sinne, EMV ist zwar wichtig, aber
normalerweise nicht entscheidend.
Und die Störabstrahlung messen um die Wirksamkeit einzelner Maßnahmen zu
überprüfen könnte ich eh nicht.
Rudolph R. schrieb:> A little heads up, 5.0 will remove FT80x support.> But 5.0 will also support BT817/BT818 and since I do not even have a> programming manual for EVE4 yet, do not hold your breath. :-)
Time for a status update, I just finished annother step of what I had in
mind for 5.0 and somehow it went a lot smoother than I thought it would.
- FT800 / FT801 support is gone
- split all display-list commands into two functions: EVE_cmd_XXX() and
EVE_cmd_XXX_burst()
- switched to use REG_CMDB_WRITE
My display-list generation looks like this now:
1
EVE_start_cmd_burst(); /* start writing to the cmd-fifo as one stream of bytes, only sending the address once */
2
EVE_cmd_dl_burst(CMD_DLSTART); /* start the display list */
3
EVE_cmd_dl_burst(DL_CLEAR_RGB | WHITE); /* set the default clear color to white */
4
EVE_cmd_dl_burst(DL_CLEAR | CLR_COL | CLR_STN | CLR_TAG); /* clear the screen - this and the previous prevent artifacts between lists, Attributes are the color, stencil and tag buffers */
5
EVE_cmd_dl_burst(TAG(0));
6
EVE_color_rgb_burst(BLACK);
7
EVE_cmd_text_burst(10,190,29,0, "The quick brown fox...");
8
EVE_cmd_dl_burst(DL_DISPLAY); /* instruct the graphics processor to show the list */
9
EVE_cmd_dl_burst(CMD_SWAP); /* make this list active */
10
EVE_end_cmd_burst(); /* stop writing to the cmd-fifo */
And to pick one example of what this looks like underneath with V4:
1
void EVE_cmd_bgcolor(uint32_t color)
2
{
3
EVE_start_cmd(CMD_BGCOLOR);
4
5
if(cmd_burst)
6
{
7
spi_transmit_async((uint8_t)(color));
8
spi_transmit_async((uint8_t)(color >> 8));
9
spi_transmit_async((uint8_t)(color >> 16));
10
spi_transmit_async(0x00);
11
}
12
else
13
{
14
spi_transmit((uint8_t)(color));
15
spi_transmit((uint8_t)(color >> 8));
16
spi_transmit((uint8_t)(color >> 16));
17
spi_transmit(0x00);
18
EVE_cs_clear();
19
}
20
21
EVE_inc_cmdoffset(4);
22
}
With 5.0 this looks a bit different:
1
void EVE_cmd_bgcolor(uint32_t color)
2
{
3
if(!cmd_burst)
4
{
5
EVE_start_command(CMD_BGCOLOR);
6
spi_transmit((uint8_t)(color));
7
spi_transmit((uint8_t)(color >> 8));
8
spi_transmit((uint8_t)(color >> 16));
9
spi_transmit(0x00);
10
EVE_cs_clear();
11
}
12
}
13
14
void EVE_cmd_bgcolor_burst(uint32_t color)
15
{
16
spi_transmit_burst(CMD_BGCOLOR);
17
spi_transmit_burst(color);
18
}
So spi_transmit_burst() replaces spi_transmit_async().
It will either write out four bytes over SPI or add a 32 bit value to
the DMA buffer instead of splitting the parameters into bytes.
The normal commands are protected to be used outside of command-burst,
they will just do nothing.
The new _burst commands are not protected anymore and also do not call
annother function anymore.
I still have to finish this and retest this with a more complex display
list but the initial speed tests I did back in June showed an
improvement of about 30%, so display list generation will be faster.
Also the binary size should be a little smaller since all the functions
that are not needed are removed by the linker.
Okay, I just did the first test directly comparing V40 und V50.
Attached are the functions that are compared.
These are functionally the same but for V50 all functions between
EVE_start_cmd_burst() and EVE_end_cmd_burst() have the new suffix
"_burst" attached.
This is just the simple test code I am using in the examples.
And the result surprised me a little.
V40
TFT_display() with DMA: 129µs
prog-size: 15436
TFT_display() without DMA: 360µs
prog-size: 15276
V50
TFT_display() with DMA: 51µs
prog-size: 12524
TFT_display() without DMA: 324µs
prog-size: 13420
That is fairly substantial.
The test werde done with an ATSAMC21 running 48MHz and an EVE3-50G.
And as V50 is somewhat tied to BT817/BT818, there was this statement
over in the BRT Community a couple of days ago:
"The BT817 and BT818 will be released at the beginning of November"
I do already have a BT817 based module to tinker with, I can not share
any details yet, but I should be prepared for the release. :-)
I just did annother small scale test, this time with an Arduino UNO
clone and a slightly modified version of my example code.
V4:
TFT_display(): 664µs
prog-size: 12272
V5:
TFT_display(): 520µs
prog-size: 10322
So it might be less comfortable to have separate EVE_cmd_xxx() and
EVE_cmd_xxx_burst() functions, but it sure is faster and takes less
space even on 8 bit controllers.
And I changed my plans, I will release this earlier.
I only have to remove anything related to BT817 for now before I put it
up on Github.
Well, I also need to brush up, modify and test my example codes.
Hallo Rudolph,
ich arbeite gerade an einem Projekt mit dem FT811 und habe eine einfache
Frage:
Gibt es eine einfache Möglichkeit zum Zeichen eines gefüllten Dreiecks?
Habe dazu leider nichts gefunden.
Danke im Vorraus.
Werner
Nein, Dreiecke kann EVE nicht, zumindest keine gefüllten.
Aber, mit Edgestrip und Scissors kann man das wohl hinbekommen, das
fällt nur nicht mehr in die Kategorie "einfach".
Hi,
wollte mich auch mal kurz zu Wort melden.
Ich habe meine ersten Schritte mit dem EVE Controller auf einem ESP32
mit Rudolphs Bibliothek gemacht und kann nur sagen, sau gut und vielen
Dank!
Ich habe noch eine Hardware-Spezifische Frage und hoffe, dass mir jemand
weiterhelfen kann.
Ich würde gerne für mein Projekt ein eigenes HMI erstellen, leider werde
ich aus den Informationen, die man bei Bridgetec erhält nicht ganz
schlau.
Und zwar würde ich gerne ein 4" Display mit 720x720 px und CTP verbauen
und es mit einem EVE4 ansteuern.
Matrix Orbital baut wohl gerade so ein Display, allerdings wollen die
mir meine Kundenspezifischen Wünsche nicht so ganz erfüllen (SPI über
LVDS + Spannungsregler on Board...)
https://www.matrixorbital.com/ftdi-eve/eve-bt817-bt818/eve4x-40g
Das Panel habe ich denke ich gefunden:
https://www.panelook.com/TL040HDS01-TDO-4-inch-4-square-720-720-tft-module-IPS-RGB-interface-touch-optionalw-YY1821-detail_92079.html
Meine Frage wäre: Kann der EVE ohne große Probleme die 720x720 px
ansteuern (Nominell ja nur 800x600), Funktioniert das mit den "nur" 18
Bit Farben? Hat jemand den ein oder anderen beispiel-Schaltplan? Bei NHD
gibts ja bisschen was aber würde mir gerne mehr als nur ein Beispiel mal
anschauen.
Für alle Tips und Hilfe bin ich sehr dankbar :)
die 720x720 sind erstmal so für sich kein Problem, das würde auch mit
den FT81x gehen.
Wo der BT815 und erst recht der BT817 einen enormen Unterschied machen
ist in der erreichbaren Wiederholrate.
Der BT815 hat den Vorteil einen höheren Basistakt zu haben und
entsprechend einen daraus abgeleiteten höheren Pixel-Clock machen zu
können.
Die BT817 gehen da einen Schritt weiter und sind generell besser geignet
für Displays mit ein wenig mehr Pixeln, nur wieso, weshalb, warum, kann
ich nicht ausplaudern. :-)
Aus dem Grund ist auch der ganze BT817/BT818 Code aus der V5 meiner
Library entfernt.
Weniger Bits pro Farbe gehen schon, die unteren Bits bleiben dann offen
soweit ich weiß.
Im Datenblatt vom FT81x sieht man das, die FT810/FT811 haben R0, R1, G0,
G1, B0 und B1 gar nicht erst heraus geführt.
Mir fällt nur gerade kein Modul ein das einen FT812/FT813/BT81x
verwendet aber nur 6 Bits pro Farbe nutzt.
Ich finde das nur anders herum, ein FT810 oder FT811 und nicht alle
Anschlüsse am Display belegt.
NHD, also Newhaven ist jetzt auch nicht gerade das schönste Beispiel für
Informationen so im Allgemeinen.
Auf der Homepage steht das die EVE Module Open Source wären, die Daten
bekommt man aber nicht mal auf Anfrage, weil die offenbar gar nicht
wissen wofür das "Source" eigentlich steht.
Immerhin haben die einen Schaltplan im Manual, das machen längst nicht
alle so.
Ich habe mich damit abgefunden, dass ich einfach nicht die Stückzahlen
habe um meine Wünsche in ein Display gegossen zu bekommen.
Also baue ich mir Platinen die ich über das Folien-Kabel mit den
Display-Modulen verbinden kann.
Zwei Varianten davon speziell für 3D-Drucker habe ich veröffentlicht:
https://github.com/RudolphRiedel/EVE_display-adapter
Es gibt aber auch noch D5019-02, D5019-03, D5019-04 und D5019-06. :-)
Die D5019-02 ist eine Briefmarke für die 16pol. Schnittstelle von Glyn,
der D5019-01 sehr ähnlich, nur ohne den dicken 10pol. Stecker.
Die D5019-03 hat einen SAMC21E18A drauf und eine CAN-FD-Schnittstelle.
Die D5019-04 hat einen SAMC21E18A und 1x CAN-FD und 1x LIN.
Die D5019-06 kann ich mit einem SAMC21J18A oder einem SAME51J19A
bestücken und 2x CAN-FD und 2x LIN nutzen.
Mein aktuelles Projekt verpackt ein EVE3-43G in eine Art Tablett-Gehäuse
mit der D5019-06, auf einem SAMC21 läuft die ganze Anwendung, ein CAN
spricht mit dem Auto und ein LIN läuft als Master für eine weitere
Komponente.
Mein Projekt davor hatte ein EVE2-70G und eine D5019-04 im Gehäuse und
auf dem SAMC21 lief nur das HMI, Touch wurde per CAN gemeldet und die
Anzeige auf Anforderung per CAN aktualisiert.
Bei den kleinen Displays packe ich die Controller-Platine als Sandwich
über die Display-Platine.
Bei den 7" ist genug Platz das daneben zu legen.
Wenn ich denn unbedingt LVDS oder RS422 oder was anderes passives machen
müsste was wieder einen SPI umgesetzt wird, würde ich entsprechend eine
neue Adapter-Platine dafür bauen.
Na okay, eher würde ich versuchen dem Kollegen der das haben will die
Geschichte auszureden und statt dessen eine Anbindung per CAN und
Controller anbieten. :-)
Hi Rudolph,
erst mal vielen Dank für die fundierte Antwort!
Offensichtlich bist Du der EVE-Guru :)
Vermarktest Du deine BT816/817 basiertes Wissen, oder hat dein AG da die
Hand drauf? :)
Der Kollege, der sich das mit dem SPI über LVDS ausgedacht hat, bin
ich... Die Idee dahinter ist, dass ich mein HMI, welches dezentral von
meinem Steuergerät verbaut werden wird, über mein Steuergerät updaten
können will. Wenn ich nun einen weiteren Controller auf der
Display-Platine verbaue, müsste ich diesen dann über z.B. CAN Updaten.
Das wäre natürlich möglich, ob es wirklich besser ist, als SPI <-> LVDS
/ RS422 Konversion weiß ich nicht... die LVDS Treiber / Receiver
SN65LVDS33 / 31 sind jetzt nicht gerade aufwendig zu implementieren und
auch nicht wirklich teuer.
CAN hätte den Charm, dass man weniger Kabel bräuchte 4 (5V/GND/CAN H/CAN
L) vs 12, oder sogar auf eine kabellose Kommunikation ausweichen
könnte... Außerdem wäre der Controller etwas entlastet, wobei sich mein
ESP32 mit 240 MHz aktuell doch noch ziemlich langweilt und die
Programmierung des Hauptprogramms ist so gut wie fertig...
Ich fange einfach mal an, einen Schaltplan zu erstellen und teile meinen
Progress mit, vielleicht hat ja mal jemand ein Auge drauf ;)
Viele Grüße
Daniel S. schrieb:> Offensichtlich bist Du der EVE-Guru :)
Naja, ich bin eifrig bemüht, aber FTDI/BRT möchte auf viele meiner
Fragen einfach nicht antworten. :-)
> Vermarktest Du deine BT816/817 basiertes Wissen, oder hat dein AG da die> Hand drauf? :)
Weder noch, mein AG macht wenig bis keine Produkte, meine Projekte sind
mehr so interne Tools, Einzelstücke.
Ich sehe das als Hobby und freue mich wenn ich das auch mal im Job
anwenden kann.
> Der Kollege, der sich das mit dem SPI über LVDS ausgedacht hat, bin> ich...
Da muss ich Dich enttäuschen, kein Daniel S. in unserem Telefonbuch. :-)
Ich habe ja nur ein wenig aus dem Nähkästchen geplaudert was für mich
gerade Sinn macht, wir haben überall CAN und die Tools dafür.
Aber die Platinen für die Drucker gehen ja eher in die Richtung was Du
gerade brauchst, Schnittstelle, Netzteil, kein Controller.
Das ist einfacher umzusetzen und flexibler als eine komplette Platine
mitsamt EVE drauf zu bauen, vor allem weil sich dann der
Modul-Hersteller mit den Displays an sich herum ärgern muss.
> Außerdem wäre der Controller etwas entlastet, wobei sich mein> ESP32 mit 240 MHz aktuell doch noch ziemlich langweilt und die> Programmierung des Hauptprogramms ist so gut wie fertig...
Was soll der eigentlich grob noch so machen? Die können ja eigentlich
fast nichts per I/O.
Rudolph schrieb:> Naja, ich bin eifrig bemüht, aber FTDI/BRT möchte auf viele meiner> Fragen einfach nicht antworten. :-)
Ja, die sind irgendwie ziemlich langsam...
Rudolph schrieb:> Ich habe ja nur ein wenig aus dem Nähkästchen geplaudert was für mich> gerade Sinn macht, wir haben überall CAN und die Tools dafür.
CAN an und für sich ist ja auch nicht wirklich kompliziert, ich habe
auch schon eine Handvoll Projekte damit gemacht, allerdings wird damit
der ganze Programmieraufwand noch höher was das Update angeht. Mein
Problem ist, dass das ganze zu groß wird, wenn ich es als "Rucksack" auf
so ein EVE Board setze :( Das Projekt soll möglichst schlank werden,
damit es gut zu verbauen ist, bzw gut in der Hand liegt.
Es handelt sich hier nicht um ein Einzelstück, aber auch nicht um eine
Großserie, da mach ich mir nichts vor... Es soll am Ende eine Steuerung
für ein Luftfahrwerk werden. Das heißt der Controller muss ein paar
Sensoren auslesen und basierend auf deren Daten und den Eingaben des
Benutzers Ventile öffnen...
"mehr" ist es nicht...
Die IO Kapazitäten des ESP erweitere ich aktuell einfach mit i2c ics,
das funktioniert soweit auch ganz gut :) Ich habe mich seinerzeit für
den Esp entschieden, da ich den Support und die Doku ganz gut finde,
außerdem kann man Updates beliebig einfach einspielen und so weiter...
Um seine magere IO Ausstattung komme ich ja per i2c ganz gut herum. Am
Ende brauch ich eh "nur" 12 ADC Kanäle und um die 10 GPIOs...
Rudolph schrieb:>> Der Kollege, der sich das mit dem SPI über LVDS ausgedacht hat, bin>> ich...>> Da muss ich Dich enttäuschen, kein Daniel S. in unserem Telefonbuch. :-)
Ich meinte natürlich nicht das Prinzip, sondern als "workaround" für
längere Kabellwege im KFZ in dieser Applikation :)
Ich schau mal wie weit ich komme und poste einfach mal meinen
Schaltplan... :)
Daniel S. schrieb:> Rudolph schrieb:>> Naja, ich bin eifrig bemüht, aber FTDI/BRT möchte auf viele meiner>> Fragen einfach nicht antworten. :-)>> Ja, die sind irgendwie ziemlich langsam...
Das auch, ich meinte das aber wie ich schrieb, meine Fragen gehen zum
Teil etwas zu tief. :-)
Daniel S. schrieb:> Das Projekt soll möglichst schlank werden,> damit es gut zu verbauen ist, bzw gut in der Hand liegt.
Mit den I/Os ist das schwieriger, keine Frage.
Angehängt mal zwei Bilder mit was ich gerade so herum spiele.
Mit 18mm Dicke ist das recht fett für ein "Tablett", liegt aber gut in
der Hand.
Wenn man da mehr Kabel raus führen würde, wäre das aber sicher schnell
sehr lästig, ich muss da aktuell nur +/-/CAN/LIN raus führen und es wird
auch am Ende nicht mehr in der Hand gehalten.
Ein Platinchen als Schnittstellen-Adapter müsste deutlich kleiner
werden.
Rudolph schrieb:> Angehängt mal zwei Bilder mit was ich gerade so herum spiele.> Mit 18mm Dicke ist das recht fett für ein "Tablett", liegt aber gut in> der Hand.
Sieht sehr robust aus :) Ich denke für den Stationären Einsatz und
generell als Einzellösung bin ich auch immer ein Freund für solche
"Zusatzlösungen" um Entwicklungstools herum. Leider wird so etwas meinen
Ansprüchen an dieses Projekt nicht so ganz gerecht :(
In der Kommunikation mit den Herstellern dieser EVE Boards kam bisher
eigentlich raus, dass zumindest die Leute die mir die Mails schreiben,
nicht wirklich wissen worum es geht...
Ich habe mal, basierend auf dem DB des BT815Q, sowie meiner bisherigen
Testplatine (SPI <-> LVDS) einen Schaltplan erstellt, der relativ
komplett und vor allem am Ende ziemlich kompakt sein dürfte.
Im DB des Displays, was ich gefunden habe, steht leider nichts zum
"Reset" Pin, außerdem hab ich noch keine Info, was den Anschluss das CTP
betrifft...
Den Reset Pin "Active Low" würde ich entweder einfach an 3V3 oder mit an
PD vom EVE hängen...(?)
Vielleicht finde ich ja noch ein besser dokumentiertes Panel in der
Größe und Auflösung mit 24 bit RGB... mal schauen
Die Belegung von dem 40pol. am Panel sagt mir gleich wieder warum ich
sowas nicht selber machen will, das passt zu nichts anderem. :-)
Die Positionen der Kabel am Display sind das nächste Problem.
Wenn man zwei Panels mit der gleichen Anschlussbelegung gefunden hat
kann man sicher sein, dass die Kabel nicht auf der gleichen Position
sind, oder unterschiedlich lang, das CTP Kabel mehr oder weniger Pins
hat oder alles zusammen.
Für den Reset könnte es helfen ein Datenblatt von dem verbauten YY1821
Treiber Chip zu haben, der chinesische Hersteller AXS bietet aber
erstmal keines zum Download an.
So richtig ungewöhnlich ist das auch nicht, Displays sind keine
Commodity Items und entsprechend ist das immer wieder lustig wenn man zu
irgendeinem Display Informationen haben möchte.
Wenn man weniger als 100k Displays kaufen möchte existiert man für die
Hersteller praktisch nicht.
Daniel S. schrieb:> außerdem hab ich noch keine Info, was den Anschluss das CTP> betrifft...
Das dürfte daran liegen, dass das Display gar keinen Touch hat.
Da fehlen wahrscheinlich auch noch ein paar Pullup/Pulldown Widerstände.
Und vielleicht auch noch Reihenwiderstände in den SPI Leitungen, damit
man bei Problemen was über Null Ohm bestücken könnte.
Rudolph schrieb:> Da fehlen wahrscheinlich auch noch ein paar Pullup/Pulldown Widerstände.> Und vielleicht auch noch Reihenwiderstände in den SPI Leitungen, damit> man bei Problemen was über Null Ohm bestücken könnte.
jaja, ich weiß :) war ja nur der stand ohne das richtige Display und
so...
Rudolph schrieb:> Das dürfte daran liegen, dass das Display gar keinen Touch hat.
Das stimmt, gibt es aber auch mit Touch und ist beim Hersteller
angefragt...
Ich überlege gerade doch einen Controller auf die Platine zu packen und
CAN zu nutzen... Vorteile wären, dass es 1. weniger Kabel sind, 2. CAN
sicherlich noch mal Störungsunanfälliger ist als SPI über LVDS und 3.
ich Displays nutzen könnte, deren Controller zusätzlich über SPI
konfiguriert werden müssen, ohne noch einen weiteren LVDS Receiver auf
die Platine packen zu müssen.
Nachteil wäre ich müsste noch Routinen Schreiben, um den Controller am
Display über CAN upzudaten. Ist natürlich kein riesen Problem, über
Bluetooth und WiFi habe ich es auch schon implementiert am ESP...
Hallo nochmal,
Versuche gerade eine Screenshot Funktion zu schreiben, und wie
erwartet funktioniert nicht wie es seien sollte. Die Funktion startet
und läuft, der Bildschirm zeigt bewegende vertikale Streifen die die
verschiedenen Zeilen des Bildschirminhaltes entsprechen, wenn das Bild
fertig gescannt wurde springt dann zurück auf normales Bild. Die Daten
werden über die zweite serielle Anschluss des ESP32 versendet, auf dem
Computer mit die Software "Free Serial Port Monitor" in .ppm Datei
gespeichert danach mit Paint.net überarbeitet. Leider bekomme ich auf
dem Computer nur vertikale Streifen als Dateiinhalt, die noch nicht mal
einer originale Bildzeile ähnlichen. Die Kopfzeile der Datei ist OK,
P6.800.480.255 (.ppm header).
Bin mir sicher dass ich irgendwas falsch mache, weiss aber nicht wo und
was.
Anbei meiner verwendete Code:
Du hast doch schon einen FT81x, warum nimmst Du dann nicht
CMD_SNAPSHOT2?
Selber benutzt habe ich das auch noch nicht, vor allem da ich die Daten
nicht aus der Hardware raus bekomme.
Aber in einem Projekt hat ein Kollege das praktisch so benutzt:
EVE_cmd_snapshot2(EVE_RGB565, SNAPSHOT_BUFFER_START,
Snapshot_X_Start_ui16, Snapshot_Y_Start_ui16, Snapshot_X_Size_ui16,
Snapshot_Y_Size_ui16);
Für die V4 meiner Library käme da noch hinzu:
EVE_cmd_execute();
Für die V5 braucht man das aber nicht.
Danach ging das dann über CAN raus und er hat das irgendwie am PC
eingelesen und konvertiert, war schon schick soweit.
Hallo nochmal auch von mir,
für meine Screenshotfunktion verwende ich snapshot2, die Rudolph bereits
empfohlen hat. Damit gab es bei mir keine Probleme.
Das Prinzip bei mir ist ähnlich, ich schreibe den Screenshot
streifenweise in eine Datei auf einen USB-Stick. Das kann ich mir dann
auf dem PC mit ffmpeg in ein gültiges Bild-Format konvertieren.
Was mir spontan auffällt ist, dass die snapshot Funktion, die du
verwendestest das Bild im ARGB4-Format mit 16 Bit pro Pixel abspeichert.
Du liest allerdings 24 Bit pro Pixel aus, wodurch sich alles verschieben
dürfte. Die Zuweisung der RGB-Werte stimmt dann dementsprechend auch
nicht.
It is happening. :-)
https://brtchip.com/bt81x/
Following the official release of BT817 / BT818 with datasheet and
programming manual I just pushed the first release of my code library to
Github with support for BT817 / BT818.
https://github.com/RudolphRiedel/FT800-FT813
There may be some kinks left as I did not have the programming manual
before and was using a preliminary version of the datasheet, but in
general it works.
Hallo Rudolph,
ich bekomme bei einem Display einen Streifen auf einen Button (siehe
Bild, Button Prog)
Weisst du woran das liegen kann?
Viele Grüsse
Werner
Werner schrieb:> Hallo Rudolph,>> ich bekomme bei einem Display einen Streifen auf einen Button (siehe> Bild, Button Prog)>> Weisst du woran das liegen kann?>> Viele Grüsse> Werner
Are you sure, this line is only on "Prog" button? I saw something like
this when ZIF connector has some dust on pin/pins (connector was dirty
inside).
Best's
Karol
Okay, das ist mir auch noch nicht untergekommen.
Ist das ein normaler Button oder was eigenes?
Was ist das überhaupt für ein Display? CFAF240400?
Kannst Du die GUI soweit frei schneiden das Du einen Testcase erstellen
kannst ohne sonst was von dem Projekt weitergeben zu müssen?
Oder zeigt doch mal bitte wie die Zeilen für den Button und unmittelbar
drum herum so aussehen.
Es ist ein Button, der mit dem Button Befehl erstellt wird.
Hier der Code Ausschnitt:
EVE_cmd_romfont(0,32); // Romfont laden
EVE_cmd_dl(DL_COLOR_RGB | WHITE);
EVE_cmd_fgcolor(PINK_1);
EVE_cmd_dl(TAG(t_prog));
EVE_cmd_button(250, 710, 220, 80, 0, 0, " Prog");
EVE_cmd_dl(DL_COLOR_RGB | WHITE);
EVE_cmd_setbitmap(MEM_PIC_progsym, EVE_ARGB2, 50, 50); // Prog Symbol
Taste
EVE_cmd_dl(DL_BEGIN | EVE_BITMAPS);
EVE_cmd_dl(VERTEX2F(267, 725));
Farben:
#define PINK_1 0xB97894UL
#define WHITE 0xffffffUL
#define RED 0xDC3545UL
Bei einem Button der Farbe RED gibts auch einen Streifen.
Wenn ich die Farben ändere bekomme ich die Streifen (fast ganz) weg.
Das Display ist von Autronic, speziell für dieses Projekt, Datenblatt im
Anhang. Möglicherweise sollte ich mir die Timings mal genauer ansehen.
Wenn ich das Display vom VM810C Kit nehme ist kein Streifen zu sehen.
Das sieht soweit doch erstmal harmlos aus.
FT813?
Was der Button mit dem Bild zu tun hat ist mir so erstmal nicht klar.
Das Timing von dem Panel ist etwas anders als bei allen anderen 800x480
die mir bisher untergekommen sind.
Das ist reichlich straff mit kurzen Zeilen und kaum extra Zeilen.
Meine "Standard" Timings für 800x480 würde ich dafür auch nicht
verwenden wollen.
Hallo Rudolph,
Der Controller ist der FT811.
Das Bild sind die 4 Quadrate auf dem Button. Das Timing schau ich mir
jetz
mal noch genauer an aber trotzdem vielen Dank für die Unterstützung!!
Äh, ja, jetzt, danke. :-)
>Der Controller ist der FT811.
Lohnt sich das wirklich?
In der Apotheke kostet der FT813 doch gerade mal 30 Cent mehr pro Stück
bei 100 Stück, aber dafür kann der das Display auch mit 24 Bit Farbe
ansteuern.
Klar, das sollte nichts machen, aber so ein schönes Display und dann die
Farbtiefe durch den EVE Chip beschneiden... :-)
Ich glaube ich muss das mal ausprobieren.
Eigentlich sollte das funktionieren, aber zuweilen führen "komplexe"
GUIs auch zu interessanen Problemen für EVE. :-)
Das mit den ungeraden Werten macht keinen Sinn, da ein anderes Display
ja ohne den Streifen funktioniert.
#Rudolph
Mit der 24Bit Farbtiete hast du schon recht, ich war bisher auch der
Meinung, daß der Preisunterschied grösser ist... und man darf auch nicht
vergessen, daß man sich immer noch Platz nach oben lassen muß :-)
Der FT811 verarbeitet die Farbe schon, nur bei der Ausgabe werden die
unteren zwei Bits nicht ausgegeben, dafür hat der schlicht die Pins
nicht.
Nach Oben ist dann doch noch Luft, die BT817 sind ja gerade erst
offiziell released. :-)
Moin zusammen,
erstmal Danke an rudolph für deine Library, die macht vieles einfacher!
Ich hab dein Bsp. aus github nachgebaut und dies hat auch funktioniert.
Allerdings nicht immer nach einem Neustart. Dann fehlten Teile der
statischen display list oder die Bilder wurden nicht richtig fertig
geladen. Wenn ich aus deinem Bsp. "EVE_cmd_append_burst(MEM_DL_STATIC,
num_dl_static)" auskommentiert hatte funktionierte aber zumindest der
dynamische Teil immer nach einem Neustart.
Nach einigen Stunden habe ich dann herausgefunden, dass mein Timer (5ms)
anscheinend die Übertragung der statischen display list unterbrochen
haben muss.
In dem Timer werden "tft_touch()" (alle 5ms) und "tft_handling()" (alle
25ms) aufgerufen.
Die Lösung des ganzen war dann die Timer erst nach dem tft_init() zu
initialisieren. Seit dem funktioniert es wie es soll :)
Ich schreib das nur, falls jmd auch mal dieses Problem hat. So muss er
nicht so viele Stunden investieren wie ich. Vllt. ist es ja auch normal
die timer als letztes zu initialisieren...
P.S. Ich benutze momentan einen SAME54P20A mit dem EVE3-50G-BLM.
Gruß
Ich würde tft_touch() und tft_handling() nicht per Interrupt machen.
Selbst tft_touch() dauert doch dafür viel zu lange und das
tft_handling() sowieso.
Klar, der "Scheduler" aus meinen Beispielen ist sehr stumpf mit der
Hauptschleife die per Systick Timer alle 5ms durchlaufen wird.
Aber im Grunde genommen sieht das in einem größeren Projekt auch nicht
anders aus, da ist dann nur weniger Code direkt in der main.c, etwa so:
1
while (1)
2
{
3
if(system_tick)
4
{
5
system_tick = 0;
6
7
watchdog_task();
8
debug_led_task();
9
can_task();
10
display_task();
11
can_task();
12
}
13
}
Nein, das habe ich so jetzt auch noch nirgendwo, außer die Anforderung
den Code per Unit-Testing testen zu wollen, fällt mir dafür auch kein
vernünftiger Grund ein.
Was da fehlt ist eigentlich nur den Controller am Ende schlafen zu
schicken.
Nur ist das witzlos in Kombination mit dem Display.
Und natürlich findet die Initialisierung da drüber statt. :-)
Das ist mit dem "Scheduler" ist auch eine gute Idee, obwohl die beiden
Funktionen "tft_touch()" und "tft_handling()" jetzt noch nicht so lange
brauchen. Werde es bei Gelegenheit mal umbauen.
Das die Initialisierung darüber stattfindet war mir auch klar ;-) bloß
habe ich halt in der Initialisierung zuerst die Timer initialisiert und
gestartet und dann das Display initialisiert. Man sollte den Timer eben
am Ende der Initialisierung starten :-)
Das tft_touch() braucht auch auf dem SAME54 mehrere µs für single-touch,
bei Multi-Touch entsprechend nach Anzahl der ausgewerteten Punkte
länger.
Das erzeugt eben SPI Traffic.
Und für die Anzeige selber braucht man schon mal ein paar hundert Bytes
bis mehrere KB.
Selbst wenn die Daten per DMA verschickt werden, den Puffer zu füllen
kostet auch Zeit.
Das ist alles ein Witz im Vergleich zum Setzen einzelner Pixel, aber
eben erheblich mehr Zeit als ich einen Controller im Interrupt
verbringen lassen würde.
Interrupts nutze ich möglichst zurückhaltend um sie als Resource zur
Verfügung zu haben wenn es wirklich mal darauf ankommt.
Und der Systick-Timer in den ARMs ist genau für sowas gedacht, als
Zeitbasis für periodisch aufgerufene "Tasks".
I have not, I tend to avoid resistive touch modules.
But I can look into adding a profile for the 5" display they used.
There is a good chance that the profile for EVE3-50 (EVE_EVE3_50) does
work for the VM816C50A.
I just pushed a small update for EVE_config.h:
- moved the profile for the RiTFT50 over to the one for the RiTFT70
- added a profile for the VM816C50A-D from Bridgetek
- added a profile for PH800480T024-IFC03 and PH800480T013-IFC05 from
PowerTip
Moin,
habe meinen Code mal nach deinem Vorschlag umgebaut und er läuft soweit
auch.
Allerdings friert das Display ab und zu ein oder wird komplett schwarz.
Der uC funktioniert allerdings noch, ebenso werden über SPI noch Daten
gesendet.
Danach kann es erst nach einem Reset wieder genutzt werden.
Ist das Problem irgendwie bekannt?
Danke und Gruß
Ich sag mal so, normal ist das nicht, wenn ich mit dem SAME51 sowas
schon bemerkt hätte, dann wäre das jetzt nicht mehr so. :-)
Also so grundsätzlich, mit nichts anderem auf dem Controller.
Läuft das hier denn durch?
https://github.com/RudolphRiedel/FT800-FT813/tree/5.x/example_projects/EVE_Test_SAME51_EVE3-43G
Also nach "leichter" Umkonfiguration auf die Takt-Quelle, die passende
SERCOM, den anderen Pins und dem Display?
Kommt sich da was in die Quere?
Soll vielleicht was anderes den gleichen DMA Kanal benutzen?
Ein häufigeres Problem ist auch eine nicht ganz so stabile
Stromversorgung für das Display.
Habe mir schon fast gedacht, dass du das Problem ansonsten schon gelöst
hättest :D Ich wollte aber zumindest mal fragen :)
Hab das Problem auch schon gelöst.
Hatte mir die SPI Signale nochmal mit dem Oszi angeschaut und dann
bemerkt, dass die Jumper Kabel, die ich benutze, nicht die Besten sind.
Nachdem ich zwei Kabel getauscht habe, läuft das Display jetzt auch ohne
Aussetzer :)
Hör bloß auf mit Jumper-Kabeln, bei den letzten die ich gekauft habe
konnte ich nur gerade so die Leitungen verwenden um da KFZ-Kontakte
drauf zu crimpen.
Hatte dahingehend noch nie Probleme mit Jumper Kabeln gehabt.
Habe diese aber neugekauft und die Buchsen scheinen nicht so gut zu
klemmen -.-
Naja wenigstens funktioniert es jetzt :)
Hi Rudolph,
ich habe deine Lib ja schon erfolgreich mit dem ESP32 und dem Arduino
Framework ausprobiert und finde sie klasse :)
Da ich mit der Funktion des Arduino-Frameworks für den ESP aber nicht
zufrieden bin, bin ich auf das IDF umgestiegen. Das IDF ist das vom
Hersteller bereitgestellte Entwicklungsframework für die ESP Serie.
Ich Arbeite gerade daran, deine Software mit dem IDF zum Laufen zu
bekommen, sehe aber ein paar Probleme, da SPI doch ziemlich anders
aufgebaut ist, als bei Arduino.
Hast Du Interesse daran, deine Bibliothek um den Support zu erweitern,
bzw. würdest Du mich dabei unterstützen?
Viele Grüße :)
Ich bin ja ohnehin gerade mit den ESP32 und auch ESP8266 am spielen,
wenn jetzt auch nicht weil ich die selber für irgendwas einsetzen wollen
würde.
Und eine Sache die ich noch auf dem Zettel habe ist der Arduino-ESP32
Seite DMA zu verpassen über das IDF was da als driver_lib.a oder so noch
mit verfügbar ist.
Das wäre zumindest vom IDF her die Richtung, zumindest hoffentlich, wenn
denn das der gleiche Code ist.
Wie man mit dem ESP32 grundsätzlich klar kommt, so ohne Arduino auf
RTOS, keine Idee.
Ich würde das auf jeden Fall mit PlatformIO anfangen wollen.
Meine Versuche mit dem ESP8266 haben auch erstmal dazu geführt das meine
Adapter-Platine und wahrscheinlich auch der ESP8266 gestorben sind,
Ersatz liegt hier jetzt, nur so richtig motiviert bin ich gerade nicht
das wieder anzuschliessen. :-)
In das RTOS usw habe ich mich mittlerweile ganz gut eingearbeitet.
Ich werde versuchen deine Lib um die Funktionen zu erweitern damit sie
auch mit der IDF funktioniert. Meine Erfolge - wenn es welche gibt :) -
teile ich dann gerne
Das erfordert ja nur ein neues Segment in EVE_target.h und EVE_target.c.
Ich scheitere gerade spontan daran ein leeres ESP-IDF in PlatformIO
anzulegen, das will nur mit Arduino, dabei sollte es auch anders gehen.
Rudolph R. schrieb:> Das erfordert ja nur ein neues Segment in EVE_target.h und EVE_target.c.>> Ich scheitere gerade spontan daran ein leeres ESP-IDF in PlatformIO> anzulegen, das will nur mit Arduino, dabei sollte es auch anders gehen.
Das ist mir schon klar, nur ich habe es gestern nicht hin bekommen :)
Ich werde mich heute noch mal intensiver damit auseinandersetzen.
In PlatformIO musst Du eigentlich nur Espressif IOT Development
Framework als Framework auswählen beim erstellen des Projekts... Oder:
platform = espressif32
board = esp32dev (bzw. dein Board...)
framework = espidf
Grüße
Naja, eigentlich und so, ich habe gestern über zwei Stunden gebraucht
bis ich endlich mal espidf-blink compilieren konnte.
Seltsame Fehlermeldungen und keine Lösung dafür, so richtig sauber tickt
PlatformIO oder auch Espressif-ESP32 noch nicht ganz.
Nach mehrmals Teile in PlatformIO entfernen und neu installieren wollte
dann cmake nicht.
Am Ende habe ich \.platformio\packages\tool-cmake gelöscht, PlatformIO
hat es neu installiert und ich konnte compilieren.
Heftig war dann allerdings was da alles für das einfache Blink-Beispiel
compiliert wird, wie ewig das initial dauert und das da ein 145kB Binary
bei raus kommt.
Danach hatte ich erstmal genug von dem Mist.
Ich habe die Kommunikation soweit am laufen, kämpfe jetzt bisschen mit
dem Gerät...
Ich komme bei EVE_init() beim initialisieren des Touch Controllers
niucht aus dem while(eve_busy()) nicht raus.
Aber hier wäre schon mal ein (von SPI Seite her) funktionierendes
Projekt.
PS: Ich musste spi_write_eeprom in eve_spi_write_eeprom umbenennen, da
es die Funktion im Framework schon gibt...
EDIT:
EVE_Init läuft durch, Backlight geht auch, nur sehen tu ich nix :(
Also ich kann schon mal compilieren so ohne Warnungen.
Und von der Struktur her sieht das erstmal so aus wie ich das auch
gemacht hätte, so weitgehend.
Mal davon ab das ich inhaltlich mit dem ESP32 code noch nicht viel
anfangen kann.
Nur bleibt das Bild bei mir noch komplett schwarz, nicht mal diese
einfache Display-Liste wird angezeigt:
Mal den Logic-Analyzer anwerfen, mit der Arduino Seite läuft das.
So ganz das gleiche wie auf der Arduino Seite macht die ESP-IDF Version
aber noch nicht.
hmmm, das stimmt, das sieht etwas komisch aus...
Haben wir vielleicht ein Problem mit Little / Big Endian oder so?
Bin leider nicht wirklich der SPI Profi, geschweige denn EVE :P
Ich habe im Bridgetek Forum eine Lib gefunden für den ESP32, aber
funktionieren tut die auch nicht :)
http://www.brtcommunity.com/index.php?topic=100.0
Das Initialisieren EVE_init() läuft bei mir aber durch - ich hab lauter
Log einträger reingeballert, da ich keinen Logic analyzer besitze...
Nur wie du schon sagst, beim erstellen der DL gibt es dann wohl
Probleme.
Vielleicht ist es dann tatsächlich dann Little / Big Endian Problem,
weil beim Initialisieren ist glaube alles noch 8 bit groß, erst später
kommen dann 16 und 32 bit commands und register
Es läuft jetzt bei mir.
Das Problem war die Byte-Order für die 32 Bit Transfers.
Irgendwo muss das doppelt gedreht sein.
Vielleicht ist aber auch auf der Arduino-Seite ein Byte-Dreher drin den
ich durch das eigene Drehen kompensiert habe.
1
static inline void spi_transmit_32(uint32_t data)
2
{
3
//ESP is little endian
4
//uint32_t be_data = htobe32(data);
5
uint32_t be_data = data;
Und warum das auf dem SPI erstmal so komisch aussieht ist auch
erklärbar.
Der ESP-IDF Code ist im Moment noch elendig langsam.
So richtig übel langsam.
Ich habe das in der Tabelle nebeneinander gestellt, der Arduino macht
mehr Traffic, weil der Code da einfach schneller läuft, das heißt der
BT815 den ich hier ansteuere ist in den Warteschleifen beim Init einfach
noch nicht fertig und beim langsameren Code in der ESP-IDF Version
schon.
Dabei ich auch schon die EVE_commands.c gegen die originale ersetzt, so
ohne die "ESD_LOGE(..." Aufrufe.
Und mit den 40ms Delay am Anfang die Du durch 300ms ersetzt hast.
Das Delay vom ESP-IDF haut übrigens auch nicht hin, das ist zu lang.
Ist jetzt kein Problem, aber auch dadurch sind die Daten auf dem SPI
beim Init auf den ersten Blick nicht gleich.
Nach den ganzen Erfahrungen, die Code-Qualität von Espressif überzeugt
mich nicht.
Zwischen zwei Datenbytes auf dem SPI derart lange Pausen einzubauen ist
schon ein Kunststück, vor allem bei 240MHz Core-Takt.
Ich hab das example jetzt auch am laufen... und er braucht zum builden
der DL ganze 60ms, das ist natürlich nichts.
Ich habe versucht das ganze zu queuen, das wird aber net viel besser...
Ich habe die delays aber gefixt, dazu muss man nur die tick rate vom
Scheduler erhöhen, das sollte jetzt besser passen.
Ich habe versucht vom Software Treiber, auf den HAL Treiber umzustellen,
jetzt zeigt er aber wieder nix an -.-'
Vielleicht kommst Du ja damit weiter :)
Naja, inzwischen wundere ich mich nicht mehr über so Sprüche das
Software-SPI mit dem ESP32 schneller ist als Hardware-SPI.
Das liegt im wesentlichen an der Software die Espressif liefert und der
Dokumentation dazu.
Hier kann man den Weg für den Arduino Teil nachlesen:
https://github.com/RudolphRiedel/FT800-FT813/issues/14
Zwischen zwei Transfers über 6µs Pausen zu haben ist schon heftig, das
sind bei 240MHz ja über 1400 Takt-Zyklen.
Um am Ende auf 140µs für die Demo zu kommen habe ich den DMA Support in
meiner Library genutzt, nur bisher ohne DMA, da der ESP32 Arduino Core
DMA nicht direkt unterstützt.
Ich bin sicher da geht noch was.
Der HAL Treiber ist doch der aus dem Arduino-ESP32?
Das ist jetzt nicht so die beste Idee, im Gegensatz zum ESP-IDF
unterstützt der nämlich DMA gar nicht.
Ich habe gerade die Pin-Konfiguration an mein Board angepasst und das
Display umgestellt, jetzt passiert auf dem SPI aber praktisch nichts
mehr.
SCK macht irgendwas, das ist aber auch alles.
hmm...
also ich habe mir jetzt mal einen logic analyzer zugelegt und werde die
Tage mal schauen wie ich es beschleunigt bekomme.
Bis dahin muss ich erst mal auf Arduino Basis mein Sample Display zum
Laufen bekommen, da passt aber was noch nicht so 100%-ig.
Ich habe die Timings im Verdacht... Könnte Die sich mal jemand
anschauen? Ich habe schon bisschen rumprobiert, aber so wirklich
verstanden hab ich es nicht...
So gehe ich aktuell vor:
1
#define EVE_PCLK (2L) //PCLK 36 MHz
2
#define EVE_PCLKPOL (0L) // 0 = Output on Negative Edge, 1 = Output on Positive Edge
3
#define EVE_SWIZZLE (0L) // dont switch output pins
4
#define EVE_CSPREAD (0L) // 0 = change r/g/b before clock, 1 = change r/g/b with clock
5
6
#define EVE_HSIZE (800L) /* Thd Length of visible part of line (in PCLKs) - display width */
7
#define EVE_VSIZE (480L) /* Tvd Number of visible lines (in lines) - display height */
8
9
#define EVE_VSYNC0 (4L) /* Tvf Vertical Front Porch */
10
#define EVE_VSYNC1 (8L) /* Tvf + Tvp Vertical Front Porch plus Vsync Pulse width */
11
#define EVE_VOFFSET (20L) /* Tvf + Tvp + Tvb Number of non-visible lines (in lines) */
12
#define EVE_VCYCLE (824) /* Tv Total number of lines (visible and non-visible) (in lines) */
Solche Timing Parameter sind genau der Grund warum ich nackte TFTs
ziemlich unlustig finde. :-)
Die meisten 800x480 kommen allerdings mit den Parametern klar die ich in
EVE_config.h unter "Resolution_800x480" abgelegt habe.
Das habe ich nicht so angelegt weil ich die Datei kleiner bekommen
wollte, das hat sich aus den ganzen Daten für diverse Displays so
ergeben.
Das BT815 5" von Riverdi zum Beispiel hatte mit den Daten einen Offset,
obwohl das in deren Datenblatt so drin steht, grundsätzlich hat das aber
was angezeigt und mit den Daten aus deren Demo-Software läuft es jetzt
auch richtig.
Ich habe noch ein Display von Powertip herum liegen, 7" 800x480 FT813.
Das Datenblatt dazu ist praktisch nicht zu bekommen, nur auf Umwegen und
veraltet, die Daten da drin sind ein Witz und auf Anfragen zu reagieren
ist Powertip anscheinend zu lästig.
Ich bin in stetem Kontakt mit meinem Lieferanten, der ist auch relativ
engagiert... leider hat der keine Ahnung vom EVE.
Ich hätte liebend gerne ein "fertiges" Modul genommen, leider habe ich
immer noch nichts gefunden, was meinen Anforderungen entspricht :( Und
der Wille zu Kundenspezifischen Lösungen scheint bei den üblichen
verdächtigen nicht so wirklich gegeben zu sein...
Ich schau mal wie weit ich komme, ich werde berichten :)
Viele Grüße
Für die Timing-Parameter braucht der Display-Lieferant auch erstmal
keine Ahnung von EVE zu haben, aber die Parameter da oben sind schon
sehr dünn.
Wenn das stimmt müsste das Panel mit einem extrem weiten Bereich an
Parametern klar kommen.
Was passiert denn mit den "Standard" Parametern?
Hast Du mal
https://github.com/RudolphRiedel/FT800-FT813/tree/5.x/example_projects/EVE_Test_Arduino_PlatformIO
ausprobiert?
Trag als Display doch zum Beispiel mal EVE_NHD_50 ein.
Kundenspezisch geht schon, das ist nur eine Frage der Menge.
TFTs sind einfach keine Massenware, das Zeug das für wenig Geld
verscherbelt wird sind so aufgekauften Restposten für die man erst recht
keine Daten erwarten kann.
Wenn ich wirklich mit Mengen um mich werfen wollen würde, dann würde ich
bei Riverdi anfragen.
Vielleicht auch bei Glyn.
Also zumindest wenn ich in Europa bleiben wollen würde.
Ach ja, der ESP8266 läuft jetzt auch, oder wieder.
Ich habe die Stelle gefunden an sich der ESP8266 immer wieder resettet
hat, ich habe einen 32-bit Pointer auf den String für z.B. Buttons und
Text erzeugt um gleich vier Bytes auf einmal zu kopieren.
Das gab sonst nirgendwo Probleme, auch nicht mit dem ESP32.
Nur kann der ESP8266 nicht per 32 Bit Pointer auf Daten zugreifen die
nicht 32 Bit ausgerichtet sind.
ARMs können das wohl auch nicht, nur ist das vermutlich nicht
aufgefallen weil der Compiler dafür gesorgt hat, dass die Strings auf 32
Bit ausgerichtet sind.
Nun ja, um da nicht noch mal mit einem anderen Controller drüber zu
stolpern habe ich gleich die ganze Funktion neu geschrieben.
Moin,
ich hab mein Problem gefunden. (und es macht für mich keinen Sinn...)
Folgendes: Beim Setup des ILI9806E habe ich ein Kommando hinzugefügt,
welches das Interface auf 24 RGB festlegt (0x70), jetzt funktioniert es
einwandfrei. Etwas Tweaking was die Timings angeht und schon hat das
Display funktioniert.
Warum ich es nicht verstehe? 0x70 ist laut DB der verdammte Default Wert
dieses Registers!
Jetzt kann ich mich darum kümmern, die Kommunikation mit dem EVE zu
beschleunigen.
Falls jemand bei irgendeiner Web-Suche hierauf stößt: angehängt der Code
für die Kommunikation zum ILI9806E über den SPI Treiber der ESP-IDF ;)
PS: mit den "standard parametern" läuft es sogar auch...
Daniel S. schrieb:> Folgendes: Beim Setup des ILI9806E habe ich ein Kommando hinzugefügt,> welches das Interface auf 24 RGB festlegt (0x70), jetzt funktioniert es> einwandfrei.
Schön das es funktioniert, aber das ist ja eklig, die Notwendigkeit den
eigentlichen Display-Chip zu konfigurieren hatte ich bisher nicht. :-)
Das der ILI9806E ein 9-Bit SPI Interface hat macht das auch nicht
hübscher.
Das ESP32 Board habe ich immer noch auf dem Tisch liegen mit dem Display
da dran, die letzten Tage konnte ich mich nur nicht dazu aufraffen mich
da mal endlich richtig dran zu machen das schneller zu bekommen, auch
auf der Arduino Seite.
Werner schrieb:> kann mir jemand sagen woran es liegt, wenn man so "Störungen" wie im> Bild auf dem Display bekommt.> Der Controler ist der FT811.
Sowas in der Form habe ich leider auch noch nie beobachtet.
Ist das statisch, oder zappelt das?
Das sieht irgendwie aus wie ein Problem zwischen FT811 und Display.
Was passiert wenn Du den Wert für PCLK mal erhöhst, also den Takt
verringerst?
Kannst Du das vielleicht frei schneiden und ein minimales Beispiel mit
einer generischen Display-Liste erzeugen welche das Problem hat?
Hallo Rudolph,
schon doof, daß das nur bei mir passiert.
Das ganze ist nicht statisch, es zappelt ein wenig.
Das mit dem freischneiden ist nicht ganz einfach, da es nur auftritt,
wenn ich viel in die Liste schreibe.
Im Beispiel wird eine Liste mit bis zu 10 Einträgen angelegt. Diese wird
dann entsprechend verschoben. Meist fängt es an zu zappeln, wenn mehr
wie 6 Eintäge drinn sind.
Wenn ich den PCLK erhöhe flackert alles.
Ich versuch mal ein Beispiel freizuschneiden, das dauert allerdings ein
wenig.
Hallo Rudolph!
Ich habe deine Library erfolgreich auf M328 und M644 genutzt. Jweils mit
NHD43-Displays. Bisher mit einigen simplen Screens und Buttons. Also
nichts extravagantes. Dennoch: Es klappt super und deine Bibliothek ist
wikrlich hervorragend. Mein Kompliment!
Als nächstes gibt es ein Projekt mit einem XMEGA64, also mit durchaus
etwas mehr Performance. Ich möchte eine SD-Karte als Speicher für Bilder
verwenden um die Screens und die Menüpunkte etwas "schöner" zu
gestalten. Ähnlich wie das Beispiel App-Mainmenu von FTDI.
Hast du bereits Dateien von SD-Karten eingebunden? Gibt es dazu irgendwo
Beispielcode, von dem man vorhandene Elemente übernehmen könnte?
Gruß,
Johannes
Moin,
Johannes schrieb:> Hast du bereits Dateien von SD-Karten eingebunden?
Nein, habe ich nicht, als ich noch mit AVR unterwegs war habe ich
90CAN128 verwendet, dann ATSAMC21 mit 256k FLASH und aktuell habe ich
ein Projekt laufen mit einem ATSAME51J19A der 512k FLASH hat.
Und dann hat das RiTFT50 das hier gerade vor mir liegt 16MB eigenen
Speicher und kann ASTC komprimierte Bilder direkt daraus anzeigen.
Die XMEGA habe ich auch nie verwendet, zum einen gibt es die nicht mit
CAN, zum anderen waren die Includes so anders das ich mich da ohne
besonderen Grund nie einarbeiten mochte.
Auf der Arbeit habe ich noch ein Eval-Board von einem Seminar rum
liegen.
Also ich würde durchaus von den XMEGA abraten und einen ATSAMC20 oder so
empfehlen, also zumindest wenn mich jemand fragen sollte ob er von den
AVR auf die XMEGA umsteigen soll.
Die Hürde ist in etwa die gleiche, nur sind die ATSAM weniger tot.
Da Speicher der limitierende Faktor ist und praktisch sämtliche Medien
Block-orientiert arbeiten liest man Dateien in Häppchen ein, so 512
Bytes oder so.
Für bereits konvertierte Daten habe ich die Funktion
EVE_memWrite_sram_buffer() eingebaut.
sd_open_file()
wiederhole_bis_ende_der_datei
{
sd_read_block()
EVE_memWrite_sram_buffer(ziel+(anzahl*blocklänge), gelesene länge)
}
Die Funktionen EVE_cmd_inflate() und EVE_cmd_loadimage() gehen davon
aus, dass sich die Daten im Speicher des Controllers befinden, zumindest
für AVR Controller.
Das kommt von der Harvard-Architektur der AVR Controller und so steht in
der EVE_target.h für AVR die Funktion fetch_flash_byte(const uint8_t
*data) welche nichts weiter macht als return(pgm_read_byte_far(data)).
Für alle anderen Architekturen steht da einfach nur "return *data;"
drin.
Also mit einem ARM könnte das so aussehen:
sd_open_file()
sd_read_block()
EVE_cmd_loadimage(ziel, optionen, sd_block, gelesene länge)
wiederhole_bis_ende_der_datei
{
sd_read_block()
EVE_memWrite_sram_buffer(REG_CMDB_WRITE, gelesene länge)
}
Das gleiche müsste auch mit EVE_cmd_inflate() funktionieren.
Das sollte funktionieren, weil sowohl CMD_LOADIMAGE als auch CMD_INFLATE
zwar die Daten direkt nach dem Kommando bekommen, aber beide anhand der
Daten feststellen ob diese schon vollständig sind.
Alternativ gibt es für die FT81x die Möglichkeit CMD_LOADIMAGE mit einem
Puffer im RAM_G zu benutzen, der Puffer wird mit CMD_MEDIAFIFO
eingerichtet.
Irgendwo da oben im Thread ist ein Beispiel zum Mediafifo.
Mit CMD_INFLATE funktioniert das aber nicht.
Aber aussehen würde das so:
EVE_cmd_mediafifo(mediafifo_ptr, size)
sd_open_file()
EVE_cmd_loadimage(ziel, EVE_OPT_MEDIAFIFO, 0, 0)
wiederhole_bis_ende_der_datei
{
sd_read_block()
EVE_memWrite_sram_buffer(mediafifo_ptr, gelesene länge)
}
So mehr oder weniger aus dem Kopf, ist ewig her das ich MEDIAFIFO
benutzt habe, ich fürchte auch gerade das ist deutlich aufwendiger und
da müssen dann auch noch zwei Zeiger in den MEDIAFIFO verwaltet werden.
Zu erwähnen ist noch das die Adresse und die Länge für den MEDIAFIFO
4-Byte aligned sein müssen.
Ach ja, mit PNG Bildern gibt es auch noch was u beachten, zum einen ist
die Dekodierung super langsam im Vergleich zu JPG, dann ist EVE etwas
wählerisch was das Format angeht und wenn man PNG lädt kann man RAM_G ab
Adresse 0xF5800 nicht benutzen weil der Speicher zum Entpacken des
Bildes verwendet wird.
Mit den BT81x kommt noch CMD_INFLATE2 dazu, das kann den MEDIAFIFO
benutzen oder alternativ auch Daten aus dem FLASH vom Display.
Zum Thema ESP32:
https://github.com/RudolphRiedel/FT800-FT813/issues/14
Letzter Beitrag da, ich gebe das erstmal auf, das führt irgendwie zu
nichts.
Ja, man kann ESP-IDF Funktionen auch unter Arduino benutzen, leider wird
das eher noch langsamer als mit dem esp32-hal-spi.c Treiber der Arduino
Seite.
Aber mein letztes Problem war das ich DMA und nicht-DMA Transfers nicht
mischen kann.
Ein paar Hundert Bytes per DMA zu verschicken ist super, etwas auf das
ich nicht mehr verzichten möchte.
Ein paar Bytes per DMA zu verschicken ist albern, das Setup dauert
länger als das eigentliche Senden.
Hallo Rudolph,
noch ist die Entscheidung über den MC nicht gefallen. ATSAMC21N wäre
eine Option. Ich benötige eine ganze Menge Hardware-UART.
Ich denke, ich werde ein Probeboard mit dem Chip machen. Gibt es bei den
SAMs etwas besonders zu beachten? Sind die internen Taktgeber
zuverlässig oder lieber Quarz?
Schließt du den FT81X genauso an wie bei einem 8Bit-AVR?
Ist das CAN vollständig on board oder wird ein Treiber benötigt?
Gruß,
Johannes
Johannes schrieb:>ATSAMC21N wäre eine Option. Ich benötige eine ganze Menge Hardware-UART.
Bisher habe ich "nur" die E, G und J verwendet, den J mit 64 Pins auch
nur für die zwei CANs bzw. um eine Platine zu erstellen auf der sowohl
ein SAME51J als auch ein SAMC21J bestückt werden können.
> Ich denke, ich werde ein Probeboard mit dem Chip machen. Gibt es bei den> SAMs etwas besonders zu beachten? Sind die internen Taktgeber> zuverlässig oder lieber Quarz?
Für CAN braucht man entweder einen sehr guten Resonator oder einen
Quarz.
Ich verwende praktisch überall NX3225GB-16 (Digi-Key 644-1233-1-ND
Ein Kunde setzt in seinem Design für das wir Software liefern gerade
einen Resonator ein, da bin ich gespannt wie das ausgeht.
> Schließt du den FT81X genauso an wie bei einem 8Bit-AVR?
Im Grunde genommen ja, mit QSPI kann ich an den EVE nichts anfangen.
Zum einen spiele ich keine Videos ab, zum anderen benutze ich DMA, bei
meiner einfachen Demo braucht ein Display-Refresh mit dem E51 14µs.
Und ein Teil davon ist ein EVE_memRead16(REG_CMD_DL) für die
Debug-Information das ohne DMA sechs Bytes über den SPI schiebt.
Das ist in der EVE_target.h zu sehen.
Wobei mein letzter Fehler auf einem Board war davon auszugehen das die
SERCOMs von C21 und E51 gleich sind.
Blöderweise ist der E51 nicht ganz so flexibel, der kann SCK nur auf
PAD1 legen, aber nicht auf PAD3.
Oh ja, zumindest bei den C21 sind die Ausgänge bei 3,3V zu schwach um
ein Display mit mehr als nur ein paar MHz direkt treiben zu können, so
über das Folien-Kabel mit den zwei Steckverbindungen.
Da verwende ich jetzt einen 74LVC2G17 für SCK und MOSI, sowie einen
74VHC1GT125 für MISO.
Für direkt nur 3,3V auf 3,3V gehen sicher auch andere Teile, aber die
Dinger habe ich eh da.
> Ist das CAN vollständig on board oder wird ein Treiber benötigt?
Für CAN wird praktisch immer ein Transceiver gebraucht, es gibt nur ganz
wenig Controller die den eingebaut haben und mir fällt da gerade ein
LPC11xx von NXP als Beispiel ein.
Hier, das war mein erstes C21 Board:
https://github.com/RudolphRiedel/SAMC21_one
Das Ding ist mit dem Transceiver und dem Spannungsregler Wakeup fähig.
An dem 7pol X5 habe ich so ein Board angeschlossen:
https://github.com/RudolphRiedel/EVE_display-adapter
Das L-D5019-01-02 hatte zusätzlich noch den gleichen Stecker.
Meine letzte Variante heißt L-D5019-06-02 und da sind neben dem Display
Anschluss und ein wenig Logik noch zwei Stück TCAN1044V drauf für zwei
Mal CAN-FD bis 8MBit/s, zwei Stück TLE7259-3GE für LIN, ein Schaltregler
für die 3,3V und ein 5V LDO für den CAN.
Bestücken kann ich da einen ATSAMC21J oder einen ATSAME51J.
Eine von denen habe ich letzte Woche in ein 7" Display gesteckt mit
einem E51 und einem CAN, vier Stück stecken mit C21 in 4.3" Displays und
brauchen noch so ein paar Zeilen Code.
Was CAN angeht, das hier spielt soweit auch:
https://github.com/RudolphRiedel/USB_CAN-FD
Allerdings kämpft der Kollege noch damit das wir bei hoher Buslast
Botschaften verlieren.
Nun ja, die Idee war ja auch nicht die Vector Tools zu ersetzen, sondern
mehr so nach unten zu ergänzen.

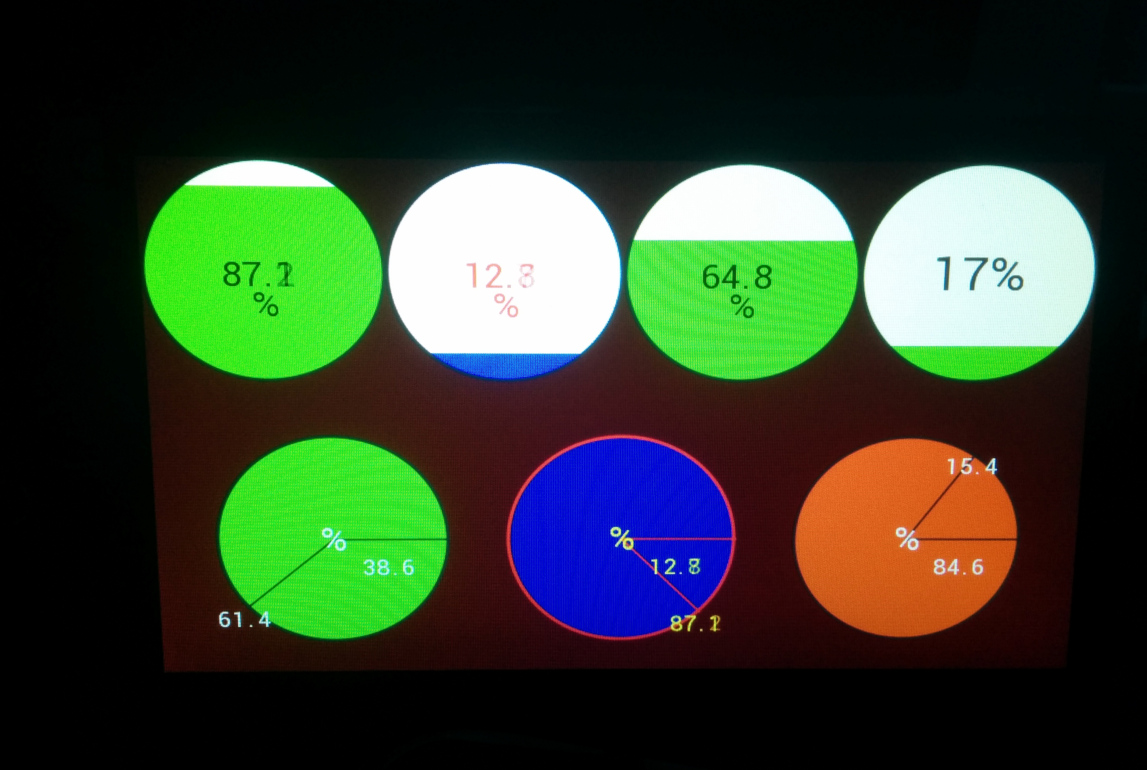

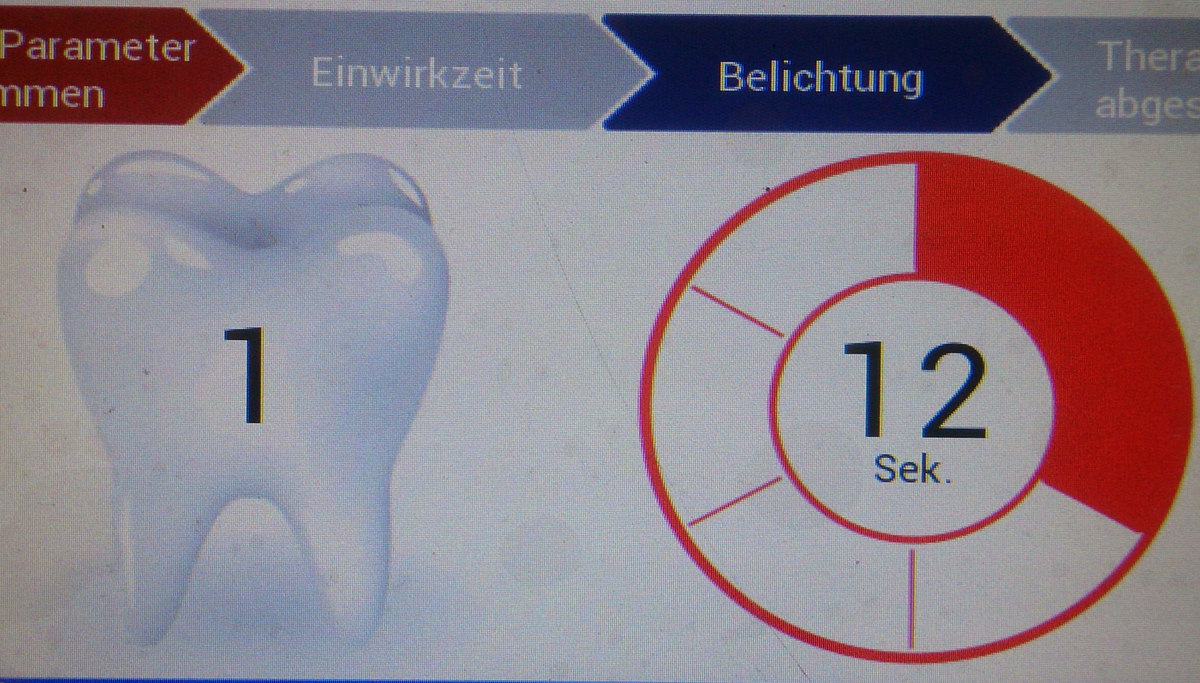





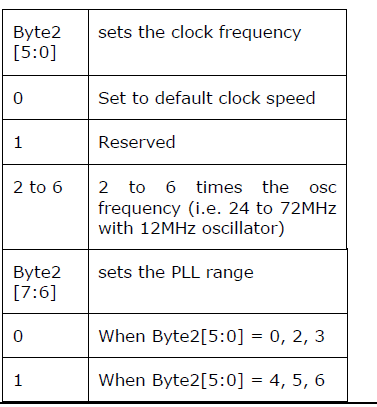


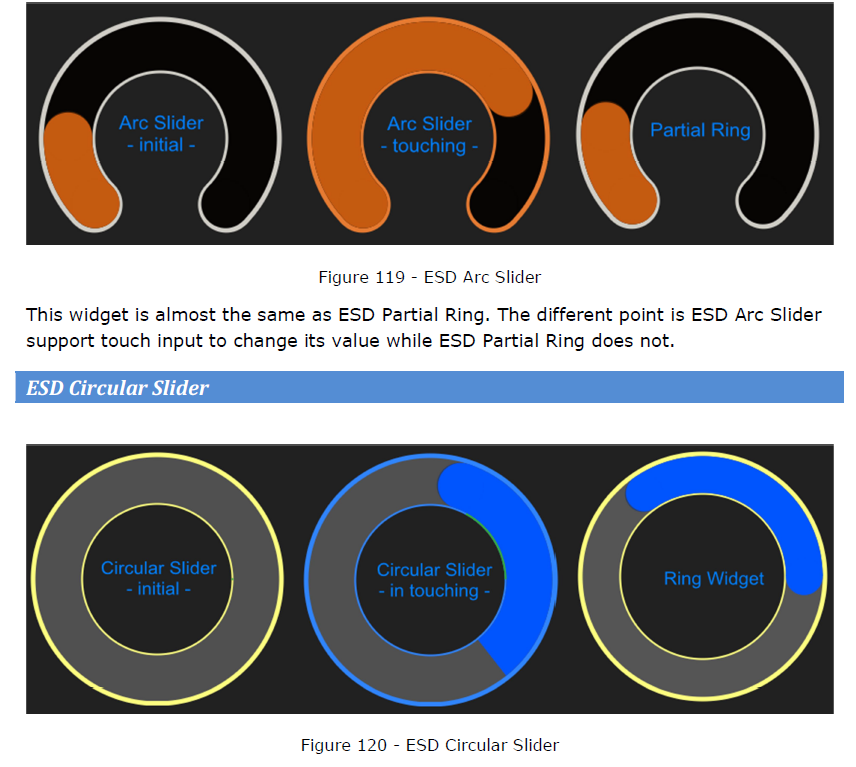
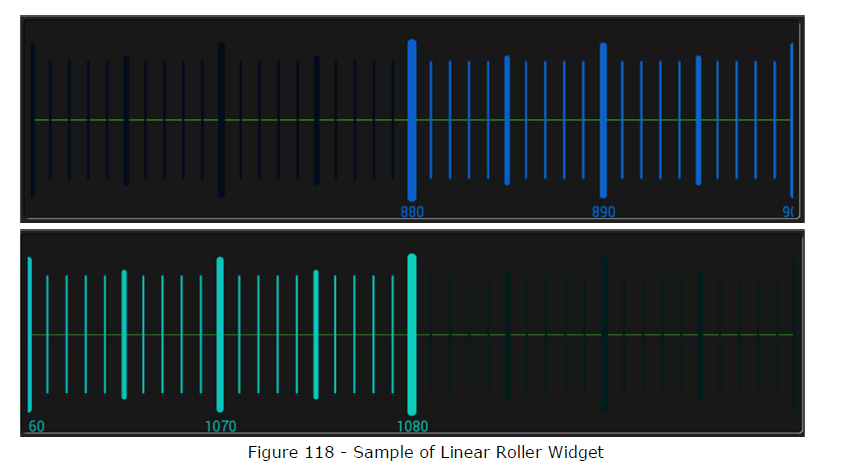





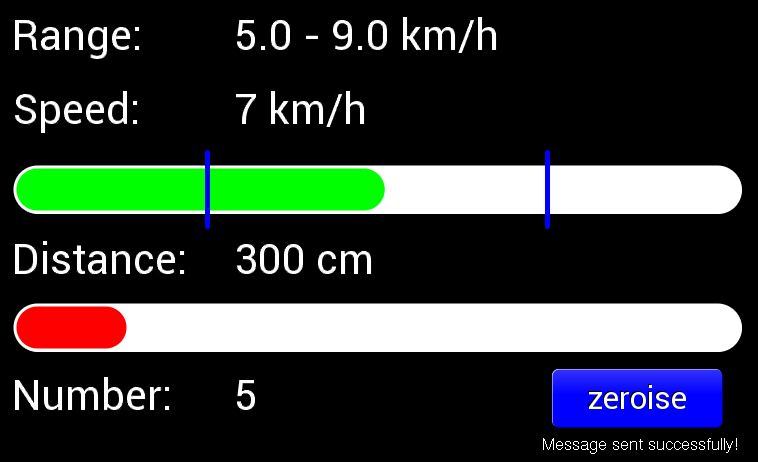





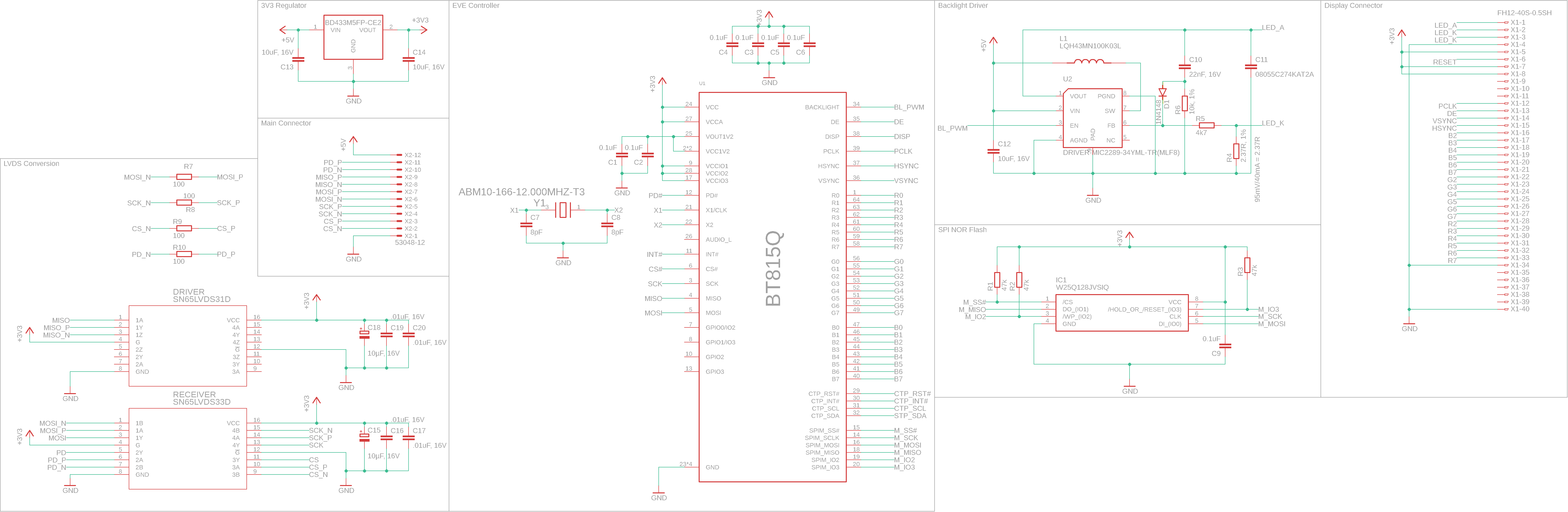

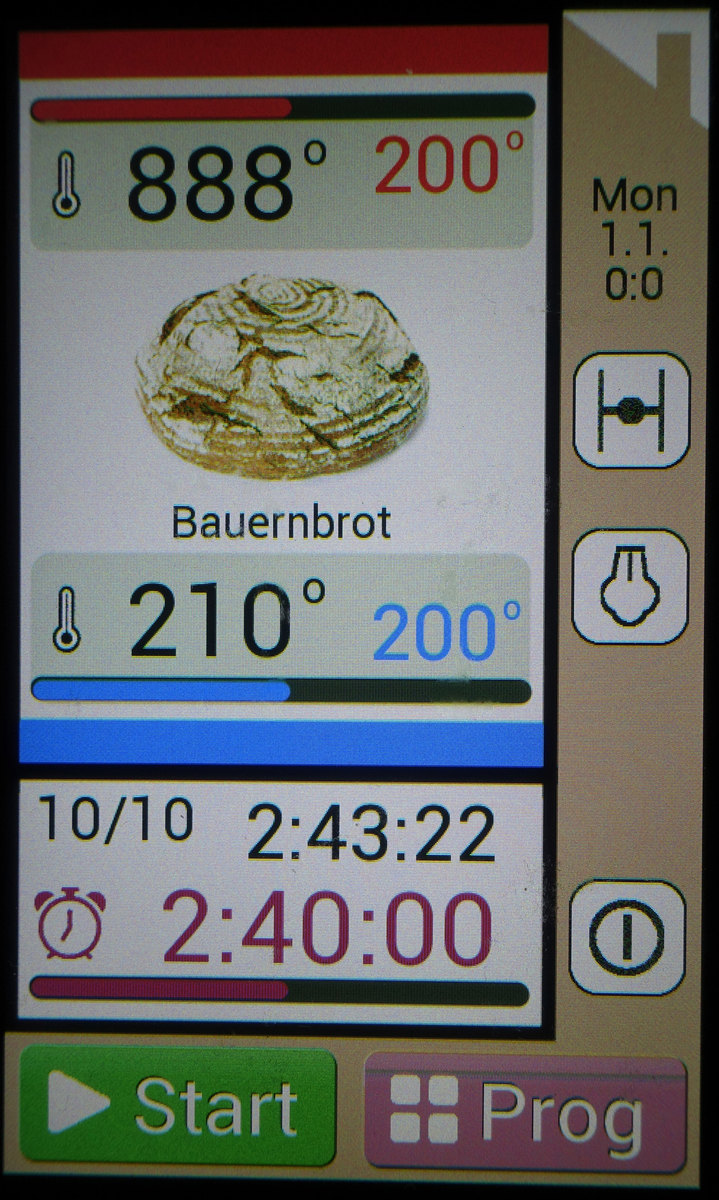


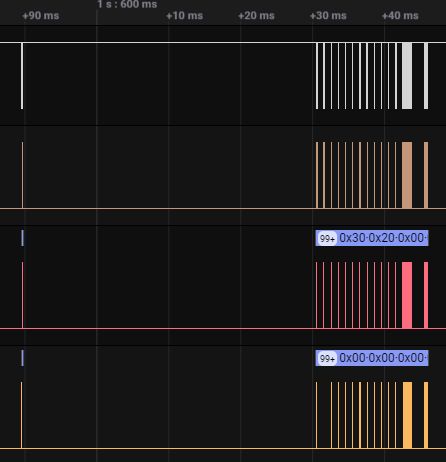

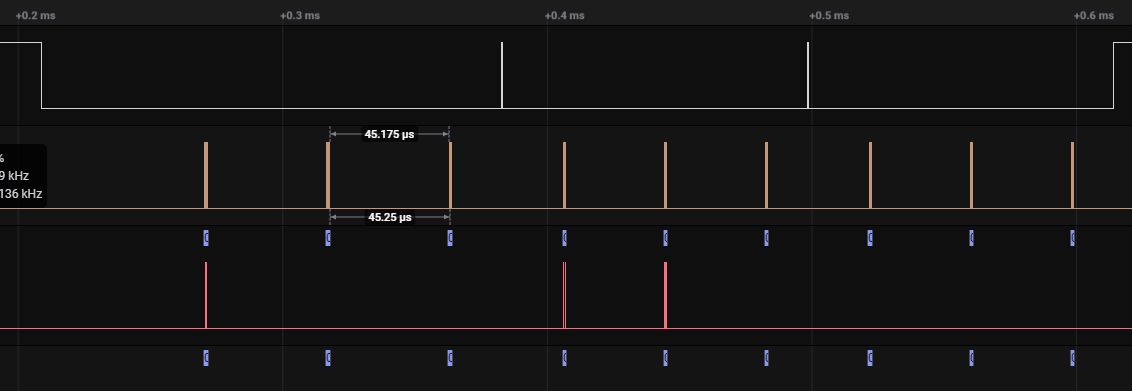
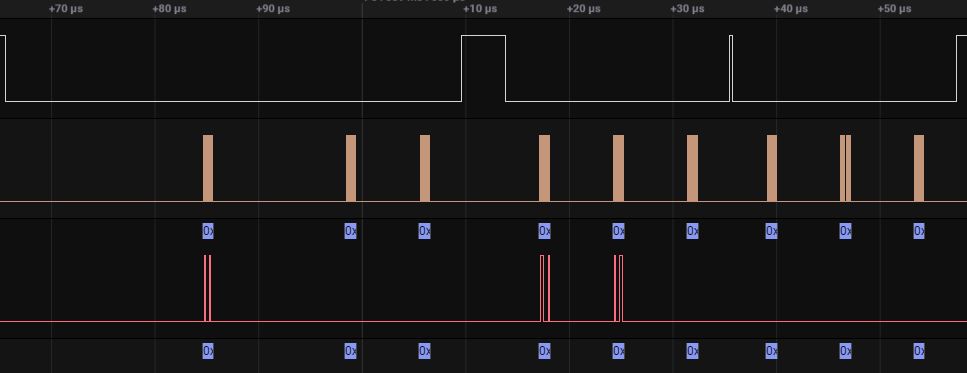

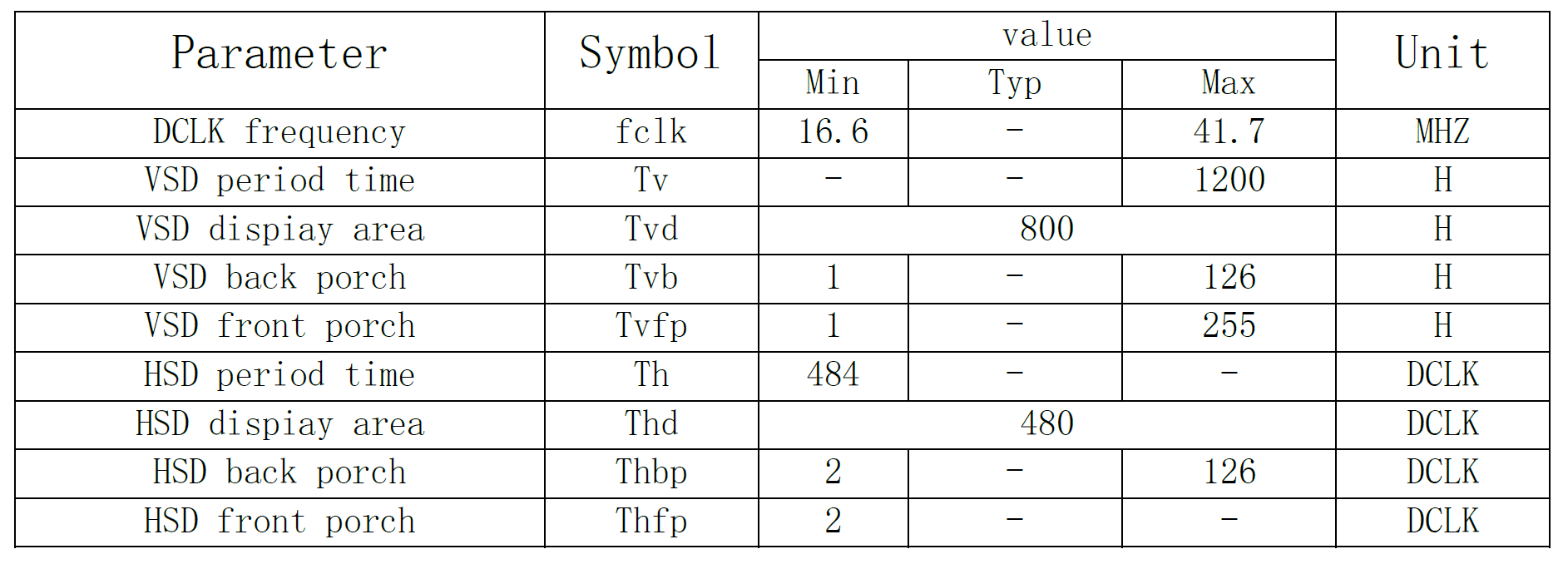

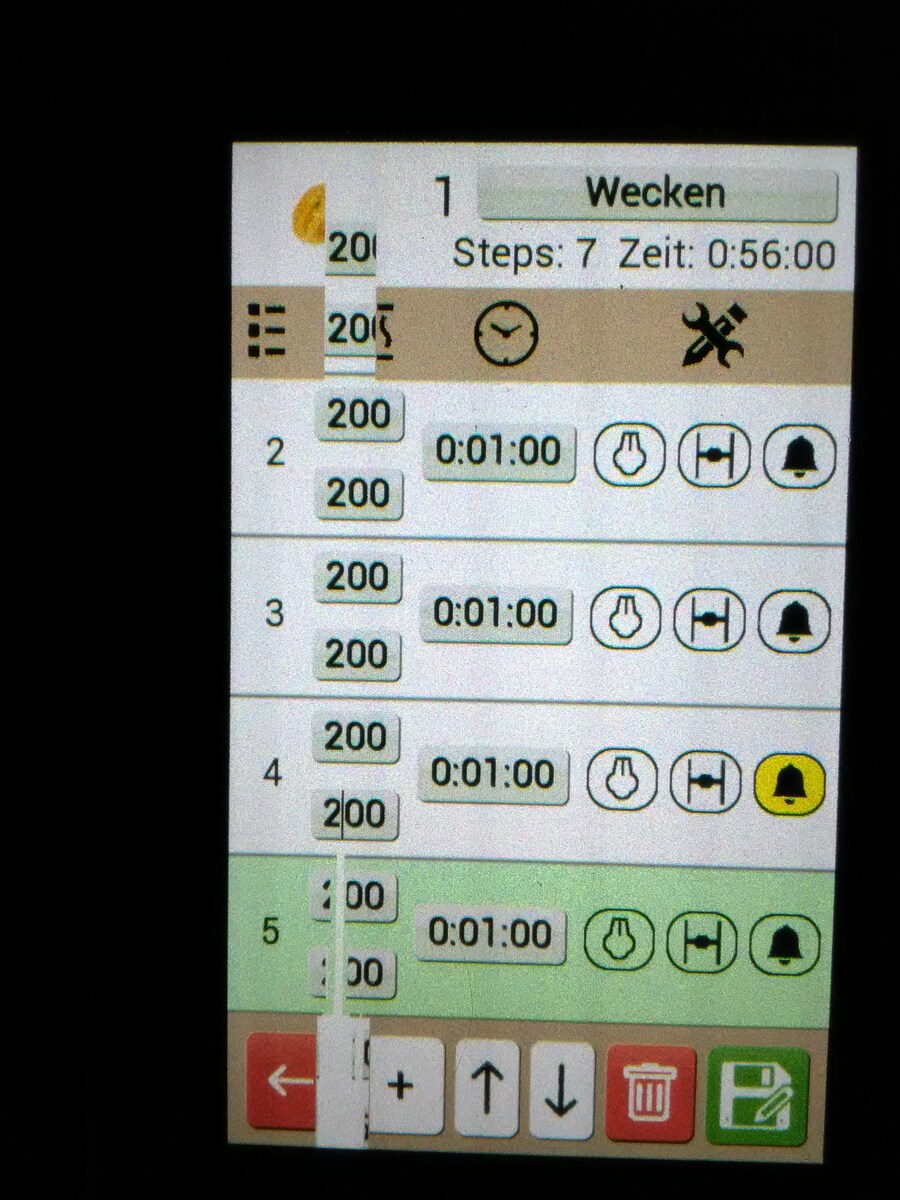
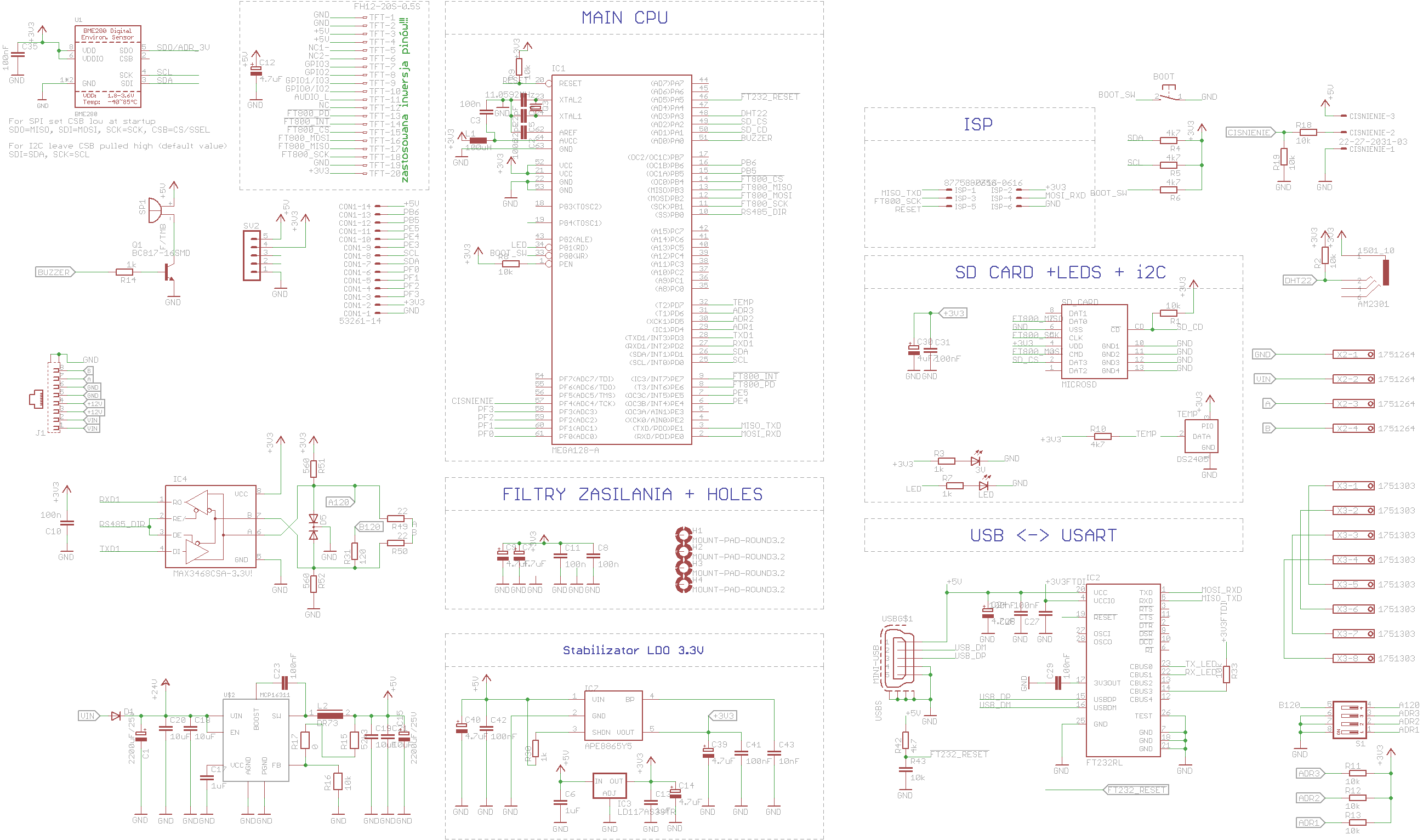{kind=link}
{kind=link}
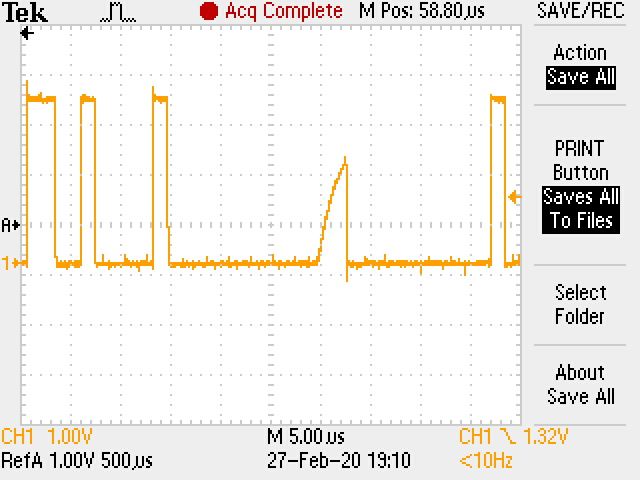{kind=link}