Hallole, als Hobbyist fehlen mir natürlich gewissen Grundlagen, daher möchte ich mal fragen. wie man bei einer im subj. genannten Regelung die Gegen-EMK-Spannung am besten mißt - zu welchem Zeitpunkt, über welche Zeit oder wie. Also: Die Regelung eines DC-Motors über dessen Gegen-EMK-Spannung erfolgt ja gemeinhin so, daß der Motor mit einer Puls-Pausen-Kombination betrieben wird, sei es mit festem Puls und variabler Pause oder vice versa oder auch mit einer festen Puls-Pausen-Kombi und dann einer PWM anstelle des Pulses mit variablem d/c. Wie auch immer, allen gemein ist, daß nach den Puls, während der Pause, die Gegen-EMK-Spannung als Maß der Ist-Drehzahl gemessen wird. Und da setzt meine Frage an: Ich habe einige unterschiedliche DC-Motor mir einer festen Puls-Pausen-Kombi betrieben und auf dem (Speicher)Skop geschaut, wie sich die Spannungen darstellen. Deutlich zu sehen war, daß nach dem Ende des Pulses erst die Gegeninduktionsspannung beginnt, mit Löschdioden begrenzt auf 0,4...0,7V (je nach Diode). Dann, nachdem die Gegeninduktionsspannung auf 0V gefallen (oder gestiegen) ist beginnt die Gegen-EMK-Spannung zu steigen, wellig (je nach Zahl der Rotorspulen/Pole mehr oder wenig deutlich), hat irgendwann den Maximalwert und wird dann geringer (je nach Dauer der Pause). Von Motor zu Motor ist der Zeitpunkt, wann die Gegeninduktion vorüber ist und wann die Gegen-EMK-Spannung (von der Welligkeit abgesehen) ihren Maximalwert hat, unterschiedlich, und dies hängt auch noch von der Frequenz und dem d/c der PWM und der Dehzahl ab. Wie und wann mißt man am besten die Gegen-EMK-Spannung bei variabler Frequenz bzw. d/c und Drehzahl? Immer zu demselben Zeitpunkt, also z.B. 1ms nach dem Ende der Gegeninduktion / Beginn der Gegen-EMK-Spannung? Oder für immer denselben Zeitraum ab einem bestimmten Zeitpunkt (z.B. nach dem Ende der Gegeninduktion oder ab 1ms danach) unter Memorierung des Maximalwerts? Oder besser Bilden eines Durchschnittswerts über diesen Zeitraum? Oder solle ich die Dauer der Gegeninduktion messen und von deren Dauer den Zeitpunkt und/oder die Dauer ableiten, zu der die Gegen-EMK-Spannung gemessen wird? Da, wenn der Motor die Höchstdrehzahl erreichen soll, die Pause möglichst kurz sein muß, kann man ja auch nicht lange Zeit messen und auf den Höchstwert der Gegen-EMK-Spannung warten - das wäre dann eher einfach.
Beitrag #6176017 wurde von einem Moderator gelöscht.
Mark K. schrieb: >Die Regelung eines DC-Motors über dessen Gegen-EMK-Spannung erfolgt ja >gemeinhin so, daß der Motor mit einer Puls-Pausen-Kombination betrieben >wird, sei es mit festem Puls und variabler Pause oder vice versa oder >auch mit einer festen Puls-Pausen-Kombi und dann einer PWM anstelle des >Pulses mit variablem d/c. Die Regelung eines DC-Motors über dessen Gegen-EMK-Spannung kenne ich nur als stetigen analogen Regler, also nicht mit PWM. Man benutzt dafür eine Brückenschaltung. So wurden früher oft die Motore in Kassetenrecordern geregelt. Hier mal ein Beispiel: https://www.gfgf.org/GFGF-Schaltplandienst/SternRadioSonneberg_KT100_sch.pdf Wenn der Motor mechanisch belastet wird steigt der Strom an. Es entsteht ein Spannungsabfall am ohmschen Widerstand der Motorwicklung. Damit der Motor nun nicht langsamer wird, muß die von außen zugefürte Spannung genau um diesen Wert steigen. Dies macht diese Regelschaltung. Die Gesammtspannung am Motor ist die Gegen-EMK-Spannung, die drehzahlabhängig ist, plus Spannungsabfall am ohmschen Widerstand der Wicklung, die Stromabhängig ist.
Also ich hab das schon mit PWM gemacht, messe also in der Pause. Das Signal das ich da Messe wird aber gefiltert weil man bei sowas ja immer irgendeinen Schmutz auf der Leitung hat. Also wird im Prinzip durch den Filter ueber die Pause eine art Mittelwert gebildet. Ich wuerde auch sagen das die genaue Groesse des Wertes eher egal ist solange ein Zusammenhang zur Drehzahl besteht, also ein regelbares System gebaut wird. Das funktioniert, zumindest nicht bei mir, von der Drehzahl 0 an. Ich brauche so 10-20% Mindestdrehzahl. Ich koennte mir aber vorstellen das es auch etwas vom Motor abhaengt. Olaf
Mark K. schrieb: > zu welchem Zeitpunkt, über welche Zeit oder wie Siehe: https://www.youtube.com/watch?v=zm5P0qfea78 Beitrag "Drehzahlregler für DC-Motor, ATmega48-328" http://www.linear.com/solutions/1667 (analoge Lösung)
Angehängte Dateien:
-

EMK-Regler-1989.png
54 KB
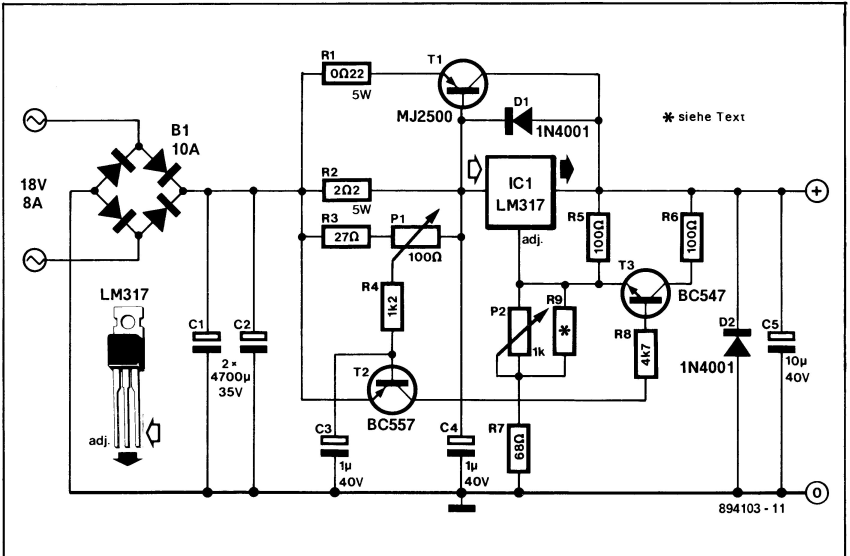
Suche auch gerade nach Schaltungen. Kennt jemand die alte Schaltung aus Elektor hier? Hat die schon mal jemand ausprobiert? Die Wärmeverluste bei einem Analog-Regler wären mir egal. Läuft ja nicht im Dauerbetrieb. Sonst müsste ich das mal auf dem Steckbrett testen. Ist nur unschön wenn man den Leistungsteil dann fliegend verdrahten muss, um das Steckboard zu schonen.
Bei der Schaltung erkenne ich keine Regelung auf die Tachospannung des Motors. Es scheint eher eine Schaltung zu sein, die die Motorspannung bei Lastzunahme erhöht. Sprich, leicht negativer Widerstand am Schaltungsausgang...
Uwe S. schrieb: > Bei der Schaltung erkenne ich keine Regelung auf die Tachospannung des > Motors. Es scheint eher eine Schaltung zu sein, die die Motorspannung > bei Lastzunahme erhöht. Sprich, leicht negativer Widerstand am > Schaltungsausgang... Im Prinzip trifft der "leicht negative Widerstand" ins Schwarze. Das (etwas vereinfachte) Ersatzschaltbild eines klassischen DC-Motors besteht aus der Reihenschaltung des Ankerwiderstandes mit der Gegen-EMK, wobei der "Ankerwiderstand" neben dem reinen Wicklungswiderstand noch die Übergangswiderstände der Bürsten und noch einen Anteil enthält, der die Eisenverluste repräsentiert. Die am Motor anliegende Spannung ist also gleich der Gegen-EMK plus dem Strom multipliziert mit dem Ankerwiderstand. In herkömmlichen Kassettenrecordern einfacher Bauart fließt der Motorstrom durch einen Widerstand, der etwa die Größe des Ankerwiderstandes hat. Eine Schaltung sorgt nun dafür, dass die angelegte Spannung gleich der Sollspannung plus einem Anteil, der doppelt so hoch wie der Spannungsabfall über diesem Widerstand ist. Damit wird die Gegen-EMK und damit die Drehzahl unabhängig von der mit wechselnder mechanischer Belastung schwankenden Stromaufnahme stabil gehalten wird. Ganz genau darf das aber nicht klappen. Wenn nämlich durch Temperaturänderungen eine Überkompensation des Ankerwiderstandes erfolgt, schwingt das Ganze. Dann wird der Motor bei steigender Belastung schneller und bei sinkender Belastung langsamer.
Danke Günni, das Prinzip ist mir bekannt. Hat aber nichts mit der Messung oder Regelung der EMK zu tun. Die von Thomas genannte Schaltung ist praktisch nur ein Spannungsregler, der zusätzlich diese leichte Spannungsüberhöhung hat, sobald der Strom steigt. "EMK-Regler" ist an dieser Stelle einfach falsch. Man könnte sogar nur einen einstellbaren Widerstand als Last anschließen, der Regler würde das nicht mal bemerken, oder nicht mehr arbeiten. Weil er keine Ahnung von der EMK des Motors hat. Die Schaltung kompensiert allein die von dir schon beschriebenen negativen Eigenschaften eines realen Motors. Das wollte ich Thomas nur verdeutlichen.
Angehängte Dateien:
-

Olaf_EMK.gif
32 KB
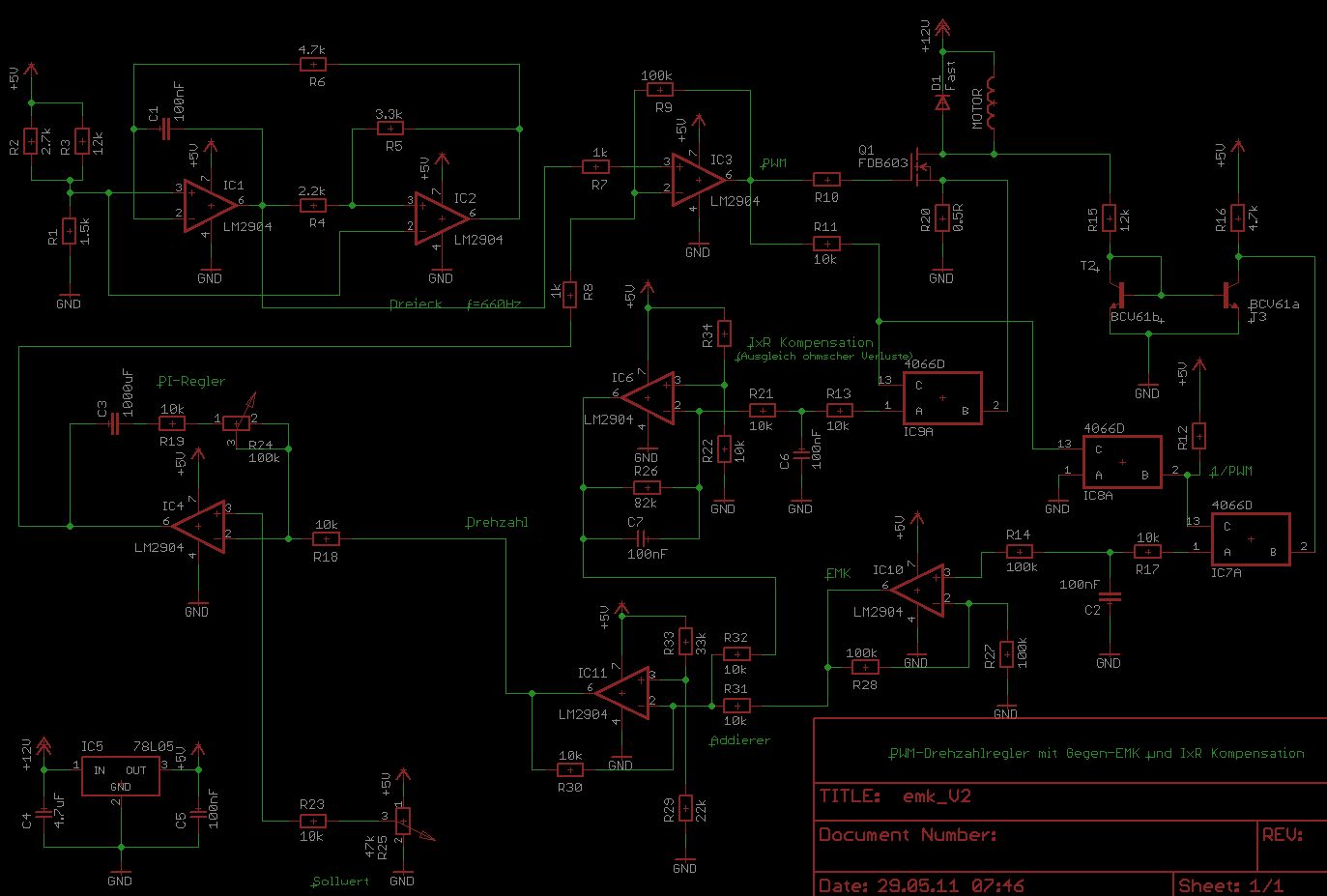
Hier noch mal meine Schaltung. Ich denke die geht als Regler durch. .-) Ups...schon fast 10Jahre her, wie die Zeit vergeht. Ich hatte das damals gemacht um das Prinzip besser zu verstehen und hat zumindest als Versuchsaufbau funktioniert. Ausserdem ist es eine super Fingeruebung wenn man auch mal was ohne Mikrocontroller machen will. Olaf
Olaf schrieb: > Hier noch mal meine Schaltung. Ganz schön umfangreich für nur 12V und 660Hz... Aber immerhin mal was Analoges. Wo liegt denn der Vorteil, sowohl IxR, als auch EMK zu regeln?
> Ganz schön umfangreich für nur 12V und 660Hz... Wieso nur? Der Motor hatte 12V und zu hohe Frequenz ist irgendwann auch bloed fuer den Motor. > Aber immerhin mal was Analoges. Ja goil was. :) Muss man ja nicht so bauen. Man kann sicherlich auch eine Menge in einen Mikrocontroller verlagern. Waere vielleicht mal eine interessante Aufgabe wenn man zu Weihnachten eingeschneit ist. > Wo liegt denn der Vorteil, sowohl IxR, als auch EMK zu regeln? Hey, das ist 10Jahre her. Liess dir selbst die Theorie an. :-) Ich glaube man bekommt sonst einen immer groesseren Drehzahlfehler mit steigender Last auf dem Motor. Wenn ich meine Schaltung schonmal selber kritisieren darf, so mit Abstand wunder ich mich etwas wieso ich da 1000uF im PI hab. Das kommt mir heftig gross vor. Vielleicht ein Tipfehler. Ich hab das damals in Baugruppen in LT-Spice entwickelt, dann auf Lochraster aufgebaut und danach den Schaltplan gemalt. Aber egal. Keiner kann diese Schaltung einfach so nachbauen und erwarten das sie mit seinem Motor funktioniert. Die wird man immer etwas anpassen muessen. Olaf
Olaf schrieb: > Wieso nur? Na weil man den Regler sonst vielleicht auch für andere Motoren hätte nutzen können? Zu hohe Frequenzen gibt es für DC-Motoren eigentlich kaum. Z.B. 20KHz verträgt praktisch jeder. Und 660Hz sind vom Ton her wirklich laut. Dann doch lieber nur 100Hz oder so. Kommt natürlich auf deinen Motor an, ob er bei so niedriger Frequenz nicht schon in die Sättigung kommt. Wobei ich hier erstmal von der Taktfrequenz für den Motor rede. Bei dir sind die 660Hz ja gleichzeitig auch die Frequenz für die Messpausen. Das ist hingegen ziemlich hoch. Damit ein Motor während so kurzer Zeit schon seine Tachospannung preisgibt, muss der Motor eisenlos gewesen sein. Insbesondere unter Belastung steigt natürlich die Zeit, während der in der Messpause erstmal die Induktion abgebaut werden muss. Olaf schrieb: > Ich glaube man bekommt sonst einen immer groesseren Drehzahlfehler mit > steigender Last auf dem Motor. Genau das soll ja schon der EMK-Regler verhindern ;-) Die Fragen waren übrigens nicht als Kritik gemeint. Bin ja überrascht, wenn hier jemand mal was real macht, und dann sogar noch analog! Meist wird doch nur noch was gekauft, weil sie es gar nicht mehr anders können...
> ist hingegen ziemlich hoch. Damit ein Motor während so kurzer Zeit schon > seine Tachospannung preisgibt, muss der Motor eisenlos gewesen sein. Glockenanker von Faulhaber Olaf
Uwe S. schrieb: > "EMK-Regler" ist an dieser Stelle einfach falsch. Man könnte sogar nur > einen einstellbaren Widerstand als Last anschließen, der Regler würde > das nicht mal bemerken, oder nicht mehr arbeiten. Weil er keine Ahnung > von der EMK des Motors hat. Da muss ich etwas ergänzen: Die Schaltung kompensiert den Spannungsabfall am Ankerwiderstand des Motors. Damit bleibt im Ersatzschaltbild nur die Gegen-EMK übrig, die so konstant gehalten wird. Die Schaltung lebt davon, dass der Ankerwiderstand und der äußere Fühlwiderstand etwa gleich oder zumindest in einem festen Verhältnis zueinander sind. Der von Uwe S. erwähnte einstellbare Widerstand entspricht der Gegen-EMK. Wenn der Widerstand so gewählt wird, dass sein Anfangswert Gegen-EMK dividiert durch den Motorstrom ist, bleibt die Spannung über dem Widerstand bei leichten Veränderungen (die Lastschwankungen am Motor entsprechen) konstant. Wie ich schon erwähnt habe, darf die Ausregelung nicht 100%-ig sein, da sonst schon bei leichten Änderungen des Motors (durch Temperatur oder Alterung) die Gefahr von Instabilitäten besteht.
Günni, wie ein Widerstand eine Spannung sein soll, musst du bitte noch mal erläutern. Und wie eine Regelung etwas regeln soll, ohne diesen Wert zu messen, bitte auch ;-) Natürlich stellt sich auch bei dieser Technik eine laststabile Drehzahl, und damit auch EMK ein. Aber der Regler macht dennoch nicht mehr, als eine Ausgangsspannung zu erhöhen, sobald mehr Strom gezogen wird. Nicht umsonst werden diese Schaltungen IxR-Regler genannt.
Olaf schrieb: > Also ich hab das schon mit PWM gemacht, messe also in der Pause. > Das Signal das ich da Messe wird aber gefiltert weil man bei sowas ja > immer irgendeinen Schmutz auf der Leitung hat. Also wird im Prinzip > durch den Filter ueber die Pause eine art Mittelwert gebildet. Ich > wuerde auch sagen das die genaue Groesse des Wertes eher egal ist > solange ein Zusammenhang zur Drehzahl besteht, also ein regelbares > System gebaut wird. Ich muß da noch mal darauf zurückkommen. Meinst Du eine analoge oder eine digital Filterung? Wenn man da einfach nur eine RC-Kombi vor den ADC-Eingang des PIC setzt ist es eigentlich nicht möglich, eine optimale Wertekombi zu finden. Wenn der Schmutz, die peaks, die Welligkeit gefiltert werden soll, wird über die gesamte Zeitdauer gefiltert, also letztlich über die RC-Kombi "integriert", geglättet. Damitz geht auch die volle Pulsspannung und die Gegeninduktion in die Messung ein und verfälscht jedenfalls für die erste Zeit nach dem Auftreten der Gegen-EMK den Meßwert - bei einer wirklich effektiven Glättung/Filterung kann man bei niedriger Geschwindigkeit und damit niedriger gegen-EMK-Spannung diese tatsächlich erst nach einiger Zeit messen, wenn überhaupt, so daß zumindest die Effektivität der Regelung massiv darunter leidet. Möglicherweise läßt sich dies dadurch umgehen, daß man im Ergebnis ähnlich einem s&h den Kondensator erst mit Masse verbindet, wenn die Gegeninduktion vorüber ist und die erste (langsam ansteigenden) Gegen-EMK-Spannung gemessen wird. Sofern das funktioniert erfordert dies aber einen weiteren freien uC-Ausgang. D.h. analog gefiltert wird nur während des Auftretens der Gegen-EMK-Spannung. Aber auch da stellt sich die Frage, nach welcher Zeit oder für welche Zeitdauer man den Wert messen möchte, denn natürlich "entwickelt" sich die Spannung am ADC-Eingang während der Zeitdauer der Gegen-EMK-Spannung. Wie sieht die Alternative einer digitalen Filterung aus? Leider habe ich davon überhaupt keine Ahnung. Eine "simple" Durchschnittswertermittlung ist es doch wohl nicht, zumal dies in so einem PIC o.ä. doch ziemlich viel Rechenleistung und -zeit erfordert ...
> Wenn man da einfach nur eine RC-Kombi vor den ADC-Eingang des PIC setzt > ist es eigentlich nicht möglich, eine optimale Wertekombi zu finden. Ich sehe in meiner Schaltung keinen PIC. Ich sehe aber einen Schalter der das Eingangsignal nur zu einem bestimmten Zeitpunkt durchschaltet. .-) > aber einen weiteren freien uC-Ausgang. D.h. analog gefiltert wird nur > während des Auftretens der Gegen-EMK-Spannung. Gut. Du hast die Idee begriffen. :) Natuerlich koenntest das jetzt auch mit einem Microcontroller machen und dann noch ganz ausgebuffter Filter wenn dir danach ist. Olaf
Also das mit der EMK, das funktioniert sehr gut, wir hatten 24V Motoren bis zu 50A in Rollstühlen auf die Art gesteuert, es war zwar eine brücke, aber eigentlich nicht anders, was wir gemacht haben ist während der Taktfase die Endstufen durchgeschaltet und gleichzeitig das EMK messsignal unterdrückt, das so gewonnene signal haben wir leicht gefiltert mit einem simplen R/C Tiefpass um die induktionsspitzen durch das takten , eventuelles bürstenfeuer und die überlappung wegzukriegen. Damit erreichten wir sowohl bei positiver wie negativer belastung des Motors bis an die Leistungsgrenze die Drehzahl auf 4% konstant zu halten. Das war wichtig weil die Kurven via zwei motoren gemacht wurden. Für eine Kurve muss ja eine Seite abgebremst und die andere beschleunigt werden. Damals wurde halt alles Analog gelösst ;) Die EMK wurde ausserdem nicht nur gemessen sondern gleich zum rekuperieren gebraucht via die Freilaufdioden, pass also auf wenn die Drehzahl runterdrehst wird dein Netzteil extrem freudig reagieren solltest du eine H-Brücke benutzen, wenn nur normales takten mit einem Transistor passiert da nicht viel ;) ps, nochwas zu dem thema .. wir haben mit 18,5khz gearbeitet und wie damals halt die einzige möglichkeit mit BUW48 Später dann BUT72 mit IRFP12P08 als Treiber noch nen gedanke .. uc3524 macht pwm mit links und hat sogar noch soll ist wert vergleich drinn und strombegrenzungslogik
> Also das mit der EMK, das funktioniert sehr gut, wir hatten 24V Motoren > bis zu 50A in Rollstühlen auf die Art gesteuert, es war zwar eine Was mich mal interessieren wuerde, konnten ihr den Motor da von 0 an regeln? Meine Erfahrung war ja das ich eine gewisse Mindestdrehzahl brauchte damit das funktioniert. Olaf
Olaf schrieb: >> Also das mit der EMK, das funktioniert sehr gut, wir hatten 24V Motoren >> bis zu 50A in Rollstühlen auf die Art gesteuert, es war zwar eine > > Was mich mal interessieren wuerde, konnten ihr den Motor da von 0 an > regeln? Meine Erfahrung war ja das ich eine gewisse Mindestdrehzahl > brauchte damit das funktioniert. > > Olaf klar muss es ja, wie will man sonnst bei stehendem rollstuhl leichte bewegungen damit machen ? das was du vermutlich meinst wegen den 0-100 % ist das vergewaltigen eines 555 . aber wenns was werden soll vetraut man das einem PWM generator an der genau dazu konstruirt wurde, der macht von 0-100% ohne klimmzüge man muss fairerweise sagen das mit kleinen motoren es nicht so gut klappte, aber ab 50W motoren ist es stabil und verhält sich wie theoretisch vermutet. der Innenwiderstand muss schon klein genug sein das die EMK selbst bei kleinen drehzahlen nicht vom takten hingemacht wird am besten lief es mit Minimotor Bauweise, dein Faulhaber weiss ich nicht, haben wir schlicht nicht angeschaut weils den nicht in Kilowatt varianten gab und auch konstruktionstechnisch für Probleme gesorgt hätte. der abtrieb musste ja 3:1 übersetzt werden, sind ja nur 8km/h erlaubt und soll an einer 20% rampe noch steuerbar sein. nochwas wir haben den rotor mit 4er bündeln gewickelt, wegen der hohen Frequenz und der daraus steigenden ohmschen Verluste durch den Skinneffekt. Das hat aber nur am Wirkungsgrad eine änderung gegeben, er wurde auch merklich weniger warm.
> das was du vermutlich meinst wegen den 0-100 % ist das vergewaltigen > eines 555 . Noe, das meinte ich gewiss nicht. In meiner Schaltung gibt es keinen 555. Mit den ollen Teilen bin ich irgendwie warm geworden. > aber wenns was werden soll vetraut man das einem PWM > generator an der genau dazu konstruirt wurde, der macht von 0-100% ohne > klimmzüge Als ich das damals (>10Jahre) gemacht habe, da meine ich irgendwo gelesen zu haben das man eine Mindestdrehzahl braucht um die EMK sinnvoll zurueckzugewinnen. Das war bei einem Testaufbau auch der Fall. Ich meine so von 10 bis 90% war moeglich. Allerdings gebe ich zu das ich mich dann auch nicht gross angestrengt habe es zu verbessern. Olaf
verstehe, nun gut ich habe mir einen bohrständer und einen 24V 775 motor bestellt und werde vermutlich genau das bauen was du auch im sinn hattest damals, ich mag schlicht nicht mit ner bohrmaschine bohren die 10000rpm drauf hat ohne je nachdem zu reduzieren. Es scheint auch keine fertigen Printbohrmaschinen mehr zu geben, früher war das Standard in jedem Werkzeug Laden, heute will man mir nen 50cm hohen Ständer mit einem akku schrauber andrehen. einer woltle mir einen ständer andrehen da hatte ich die Hilti reingekriegt, 56mm aufnahme: und riesig, der preis war auch sehr riesig. Stell mal vor Leiterplatten bohren mit sowas .. geht nur mit Gehörschutz ja da könne ich auch Gewinde und Kronenbohrer verwenden.. ach ne :D was soll ich mit einem Kronenborer auf meinen Leiterplatten ?
noch wegen der EMK und tiefen drehzahlen, die EMK ist 100% proportional zur drehzal und wnen die 0.1% ist ist auch die EMK auf dem wert, Vorrausgesetzt ohne elektrische Last ausnutzen zur energierückgewinnung geht naturlich nicht bis kurz vor dem stillstand aber messen des leerlauf schon
> Stell mal vor Leiterplatten bohren mit sowas .. geht nur mit Gehörschutz > ja da könne ich auch Gewinde und Kronenbohrer verwenden.. ach ne :D Ich bohre mit der BFW40 von Proxon. Die ist schoen leise. Klar auch etwas ueberdimensioniert nur zum Platinenbohren, aber ich mach damit auch anderes. Oh..und sie hat eine ganz gute Drehzahlregelung. :-D Olaf
Man kann mit der (laststabilen) Drehzahl problemlos bis nahe null runter. Es geht ja nicht um einen sensorlosen EC-Motor... Roger S. schrieb: > man muss fairerweise sagen das mit kleinen motoren es nicht so gut > klappte, aber ab 50W motoren ist es stabil und verhält sich wie > theoretisch vermutet. Das hat vor allem mit der Anzahl der Kollektorsegmente zu tun. Kleine, und vor allem billige Motoren haben nur z.B. 3 Segmente und 2 Magnete, bei denen sieht die Tachospannung generell aus, wie Kraut und Rüben... Man kann selbst solche Motoren unterm Strich sehr langsam laufen lassen, aber von einem runden Lauf kann dann keine Rede mehr sein.
Roger S. schrieb: > verstehe, nun gut ich habe mir einen bohrständer und einen 24V 775 motor > bestellt und werde vermutlich genau das bauen was du auch im sinn > hattest damals, ich mag schlicht nicht mit ner bohrmaschine bohren die > 10000rpm drauf hat ohne je nachdem zu reduzieren. Ja, diese Spielzeugmotoren reagieren mit starkem Drehzahlabfall schon bei geringster Belastung, da wäre nicht nur eine Belastungsstabilisierung (negativer QuellWiderstand) sondern sogar eine echte Regelung mit Sensor sinnvoll, man braucht dann aber mehr als 24V um die 10000 auch unter Belastung noch halten zu können. Zumal 10000 bei den kleinen Durchmessern von Löchern in Platinen eher wenig sind > Es scheint auch keine fertigen Printbohrmaschinen mehr zu geben Doch, schon http://www.zujeddeloh.de/produkte/bohren_senken_reiben/maschinen-_--273/tischbohrmaschine_tb24_mit_drehzahlregelung--_11027.html (B10, denn dafür gibt es ER11 Spannzangen) http://www.zujeddeloh.de/produkte/bohren_senken_reiben/maschinen-_--273/tischbohrmaschine_tb48_mit_drehzahlregelung--_13014.html Proxxon 28124 Tischbohrmaschine TBH (zu niedrige Drehzahl für kleine Löcher, zu klein für grosse Löcher, aber inkl. Spannzangenhalterung) DRILL RF-6HV Kleinbohrmaschine TVS-6 wird aber u.a. zum Platinenbohren angeboten http://www.gg-tools.com/ HG-X0 https://www.bungard.de/de/produkte/bohrer/variodrill (Bungard Variodrill 1500 EUR) http://www.mutronic.de/d_diastar3400_c.htm (CNC Bohren, Fräsen, ca. 72000 EUR, DIADRIVE 2000 ca. 20000 EUR Aber seit dem es CNC Portalgraviermaschinen (ie Sainsmart Genmitsu 3018) für 130 EUR gibt, lohnt eine manuelle Bohrmaschine für über 100 sicher nicht mehr. > früher > war das Standard in jedem Werkzeug Laden, Sicher nicht.
> Proxxon 28124 Tischbohrmaschine TBH (zu niedrige Drehzahl für kleine > Löcher, zu klein für grosse Löcher, aber inkl. Spannzangenhalterung) Das Teil kenn ich aus der Firma. Ist hoellenlaut und irgendwie klapprig. Man kann damit Platinen bohren, aber wuerde ich nicht haben wollen. Und Drehzahleinstellung erfolgt da ueber einen Riemen! ARGH Das ist in diesem Thread vollkommen inakzeptabel! Und was die Drehzahl angeht, du hast natuerlich erstmal recht. Die kleinen Bohrer werden normalerweise mit sehr hohen Drehzalen genutzt, aber an meiner BFW40 hab ich jetzt auch bestimmt seit 7-8Jahren denselben 0.6er Bohrer in Verwendung ohne das er mir abgebrochen ist und der letzte ist mir abgebrochen weil ich die Platine nicht richtig festgehalten habe. Wichtiger ist also IMHO ein guter Rundlauf, dann darf die Drehzahl auch niedriger sein. Olaf
das war eigentlich egal an was es bei den kleinen motoren happert, sie taugen einfach nicht, wie du sagst unwucht, zu kleiner kollektor für nen saubern bürstenkontakt, Eisen beim pulsen zu schnell in der sättigung .. usw aber egal es ging um die Technik mit der EMK messereim halt einfach mal nen Motor mit 20% tastverhältnis speisen und mit dem Oszi die Spannung am Motor ansehen. Einen FET und Freilaufdiode diode mittels 10V rechteck aus dem Geni auf das Gate reicht dafür Dann mal Motor abbremsen oder antreiben und auf die Puls pausen Spannung achten dies sollte in einem grossen frequenzbereich annähernd gleich sein. ohne tacho oder strommessung (was eher kritisch ist und je nach motor und temperatur gerne mal aus dem ruder läuft) lässt sich die drehzahl recht gut konstant halten ohne viel Aufwand. Aber wie auch immer, es war mein Vorschlag und meine Erfahrung die ich mitteilen wollte
das proxxon ding hab ich auch gesehen, das kann man aber ned ernst nehmen darum hab ich das auch gleich wieder aus den gedanken verbannt
Kann es sein das Drahtvorschübe in Schweißgeräten über EMK geregelt werden? Hab mich schon immer gefragt wie die sicherstellen das die Geschwindigkeit gleich bleibt.
Wie schön, daß der Fred exhumiert wurde ... ;-) Darf ich als Initiator auf meine Ausgangsfrage zurückkehren und auf mein erstes post verweisen? Nachdem wir uns einig sind, daß es eine Drehzahlregelung über die Gegen-EMK-Spannung gibt und dies auch funktioniert und man dies analog und digital machen kann (bei mir ist es digital) ist die Hoffnung wiedererwacht, vielleicht doch noch eine Antwort meine Fragen zu erhalten.
Guck mal da: Beitrag "DCC Decoder Lastgeregelt asm" - ist zwar eher für ein Motörchen als für einen Motor, aber das Prinzip, wann wie messen, kannst du vielleicht daraus entnehmen. MfG, Arno
Danke für den link aber das hilft in Bezug auf meine Fragen nicht weiter. Bei mir geht es auch nur um "Motörchen", aber das Prinzip ist ja gleich. Und diese Fragen stellen sich doch jedem, der einen DC-Motor irgendwie pulsartig betreibt (PPM, PWM) und in den Pulspausen die Gegegn-EMK-Spannung mißt/auswertet. Aber in keiner Publikation oder Erklärung zu dieser Art der Regelung bzw. Drehzahlerfassung/auswertung, die ich gelesen habe, finde ich etwas zu diesen Fragen.
Mark K. schrieb: > Danke für den link aber das hilft in Bezug auf meine Fragen nicht > weiter. Dann hab ich deine Fragen wohl falsch verstanden - in den Quellcodes steht so viel Kommentar, dass man IMHO nicht einmal Assembler verstehen muss, irgendwas mit "Messung dauert 900 Zyklen, also sollte man sie 900 Zyklen vor Wiedereinschalten beginnen, damit sie kurz vor Wiedereinschalten zu Ende ist". MfG, Arno
oh man da hab ich was losgetreten... aber trotzdem schön das wieder Leben in die Bude kommt Wir sollten öfters tiefsinnige Diskussionen zu unserem Hobby/Beruf abhalten. etwas positives kommt immer bei raus.
Noch eine anmerkung wegen dem messzeitpunkt der einize "störer" ist der Positive Puls, in der PWM Lücke messen das ganze mit RC filtern und gut ist. die ungenauigkeit durch überlappungen des blokieren der spannung wird eh mit RC filter weggeputzt, eigentlich ist es eine sample und hold schaltung welche den hold vom PWM signal aufgedrückt kriegt. Ich hab da kürzlich mal gesehen dass es sogar einen fix fertigen opamp gibt der einen gate eingang hat. wir haben einfach das messignal mit einem Fet kurzgeschlossen während der Puls fase . wenn die frequenz hoch genug ist läuft das problemlos, Konkurenten benutzen 150-200Hz die habens nie richtig hingekriegt.
Roger schrieb: > Noch eine anmerkung wegen dem messzeitpunkt der einize "störer" ist der > Positive Puls, in der PWM Lücke messen das ganze mit RC filtern und gut > ist. Nein, es gibt etliche Störer. In der Pause muss zunächst der Strom der Motorinduktivität abgebaut werden. Erst dann kann man überhaupt was messen. Bei einem hochwertigen Motor wird anschließend recht sauber die Tachospannung ausgegeben, und zwar (fast) gleichbleibend bis zum nächsten Ansteuerpuls. Bei billigen Motoren schwankt selbst die reine Tachospannung wild hin und her. Gemischt mit weiteren Schwankungen durch unsaubere Kommutierung. Mark K. schrieb: > Aber in keiner Publikation oder > Erklärung zu dieser Art der Regelung bzw. Drehzahlerfassung/auswertung, > die ich gelesen habe, finde ich etwas zu diesen Fragen. Natürlich nicht, weil das meist nur reine Theorie ist. Der Verfasser hat selten eine reale Platine in Händen gehalten, geschweige denn, selbst entwickelt. Mark K. schrieb: > Wie und wann mißt man am besten die Gegen-EMK-Spannung bei variabler > Frequenz bzw. d/c und Drehzahl? Der ideale Messzeitpunkt ist so kurz wie möglich vorm neuen Ansteuerpuls. Und zwar deshalb, weil man die Pause ja kurz halten will, aber dennoch der Induktivität genug Zeit geben muss, den Strom abzubauen. Diese Selbstinduktionszeit wird sehr lang, wenn der Motorstrom steigt. Also man ist in der Realität schon froh, nicht trotz der maximal späten Messung doch noch in den Bereich der Selbstinduktion zu rutschen. Du hättest für diese Frage übrigens nur MaWins Link gleich ganz oben ansehen müssen, dort wird es erwähnt.
Wenn Du einen Testaufbau mit zusätzlichem Tachogenerator machst, kannst Du die Werte der Gegen-EMK während einer Periode (x Umdrehungen des Motors) aufintegrieren. Ist der Wert bei unterschiedlichen Lasten/Eingangsspannungen nicht stabil, dann ist die Totzeit zwischen Abstellen der PWM und Messung nicht lang genug. Bei meinen N20-Getriebemotörchen z.B. muss ich die PWM abstellen, dann 50µs warten, dann messen, dann regeln.
Im Anhang wird eine kommerziell vertriebene Lösung dargestellt. ct.de/yqb8
Framulestigo schrieb: > Wenn Du einen Testaufbau mit zusätzlichem Tachogenerator machst Ja, wenn man nicht selbst weiter denkt...schlage mich auch (theoretisch) mit den sogenannten Modelleisenbahn-Lokdecodern herum, die seit geraumer Zeit mit "Lastgeregelt" beworben werden. Leider kann ich bei den (beiden) Dekodern, die ich habe, Harwaremäßig nicht sehen, dass da ein Signal zur Regelung gewonnen wird. "Früher" hat man versucht, die Motordrehzahl einfach zu stellen (und hat gehofft, dass der Motor bei moderater Last = Steigung nicht wesentlich einbricht. Und so ein Testaufbau mit Tacho. wird mein nächstes Projekt... Gruß Rainer
der nachteil Heisemann schrieb: > Im Anhang wird eine kommerziell vertriebene Lösung dargestellt. > ct.de/yqb8 Nun nix mit dem thema zu tun da es dabei um mehrfasige BLDC motoren oder schrittmotoren geht
Rainer V. schrieb: > Ja, wenn man nicht selbst weiter denkt...schlage mich auch (theoretisch) > mit den sogenannten Modelleisenbahn-Lokdecodern herum, die seit geraumer > Zeit mit "Lastgeregelt" beworben werden. Darum geht es auch in meinem Projekt. > Leider kann ich bei den > (beiden) Dekodern, die ich habe, Harwaremäßig nicht sehen, dass da ein > Signal zur Regelung gewonnen wird. "Früher" hat man versucht, die > Motordrehzahl einfach zu stellen (und hat gehofft, dass der Motor bei Ich beschäftige mich seit fast 20 Jahren passiv wie aktiv (mit teils seeeeeehr langen Pausen, bspw. habe ich aktuell schon mehr als ein Jahr nichts mehr daran fummeln können) damit und von ASIC-Lösungen wie sie Märklin verwendet (hat) abgesehen funktionieren die eigentlich mehr oder minder nach dem gleichen Prinzip, mal mehr, mal weniger aufwendig. M.E. ist seit vielen Jahren state of the art, daß ein "Generalzyklus" mit 60 bis 120 Hz läuft mit einem festen d/c, wobei während dessen Pause die Gegen-EMK-Spannung gemessen wird und während des Pulses wird eine vergleichsweise hochfrequente PWM von 10 ... > 30 kHz mit einem d/c auf Grundlage der vorherigen Messung(en) ausgegeben. Dann wird angeblich auch der Strom moduliert und was weiß ich noch alles - schon längere Zeit sind die etablierten Produkte so gut, daß man als Privatier oder Hobbyist allein schon hinsichtlich der Motoransteuerung nicht auch nur mehr in die Nähe kommen kann, von dem Gesamtprodukt nicht zu reden.
Mark K. schrieb: > schon längere > Zeit sind die etablierten Produkte so gut, daß man als Privatier oder > Hobbyist allein schon hinsichtlich der Motoransteuerung nicht auch nur > mehr in die Nähe kommen kann, von dem Gesamtprodukt nicht zu reden. Ja, das denke ich auch und so ein Dekoder ist ja auch zu bezahlen...trotzdem hat man ja bei einem Bürstenmotor nicht viele "Schrauben", an denen man drehen kann. Drehgeber mal ausgeschlossen. Aber zum Messen wäre der gerade richtig. Und wenn ich mich recht erinnere, dann gab es rein analoge Schaltungen, die mit Gegen-EMK gearbeitet haben. Das würde man sich heute aber nicht mehr antun, denke ich... Viel Spass und Erfolg! Rainer
@ Rainer V. : Hast pm Rainer V. schrieb: > Ja, das denke ich auch und so ein Dekoder ist ja auch zu > bezahlen...trotzdem hat man ja bei einem Bürstenmotor nicht viele Wirtschaftlich lohnt sich eine Eigenentwicklung nicht wirklich. Selbst wenn man dutzende von Loks digitalisieren möchte ... > "Schrauben", an denen man drehen kann. Drehgeber mal ausgeschlossen. > Aber zum Messen wäre der gerade richtig. Und wenn ich mich recht Ich habe den Gedanken, die alten Reihenschlußmotoren zu regeln, noch immer nicht gänzlich aufgegeben. Aber über die Gegen-EMK-Spannung geht es nicht (auch wenn man mit Tricks an diese kommt), das ganze würde viel zu niederfrequent werden. Gerade diese Motoren bieten aber die Möglichkeit, auf den Rotor eine Tacho/Stroboscheibe anzubringen, dessen Drehzahl über einen Reflex-Sensor ausgewertet wird. Und damit hat man einen sauberen Input für die Regelung, die überdies eine kontinuierliche Messung erlaubt. Jetzt braucht man nur noch das know-how, einen Regler zu programmieren ... > erinnere, dann gab es rein analoge Schaltungen, die mit Gegen-EMK > gearbeitet haben. Das würde man sich heute aber nicht mehr antun, denke > ich... Ja, in dem Bereich war es der alte c90/6090-Dekoder von Märklin. (Über) 20 Jahre her ... Den Schaltplan gibt es auch noch im Netz ...
Uwe S. schrieb: > Roger schrieb: >> Noch eine anmerkung wegen dem messzeitpunkt der einize "störer" ist der >> Positive Puls, in der PWM Lücke messen das ganze mit RC filtern und gut >> ist. > Nein, es gibt etliche Störer. In der Pause muss zunächst der Strom der > Motorinduktivität abgebaut werden. Erst dann kann man überhaupt was > messen. So ist es. Die Gegeninduktionsspannung geht tief in den negativen Bereich und erst wenn diese vorüber ist hat das Messen überhaupt Sinn. Und dann steigt sie auch erst langsam an, was eben zu meiner Frage führt: (Ab) Wann messe ich? Bzw. (ab) Wann soll gefiltert werden? Oder ist das Wumpe weil es, wenn es immer / unter allen Lastbedingungen gleich ist, im Verhältnis zu demselben Ergebnis führt? > Bei einem hochwertigen Motor wird anschließend recht sauber die > Tachospannung ausgegeben, und zwar (fast) gleichbleibend bis zum > nächsten Ansteuerpuls. "Gleichbleibend" sicherlich nicht bezogen auf die Höhe der Spannung - denn diese ist ja geschwindigkeits- und damit lastabhängig. > Bei billigen Motoren schwankt selbst die reine > Tachospannung wild hin und her. Gemischt mit weiteren Schwankungen durch > unsaubere Kommutierung. Genau so ist es. Wie angedeutet geht es hier um Modellbahn und da sind die Motörchen oft weder besonders hochwertig noch einheitlich und die Umgebung ist versaut durch vielerlei Störungen durch Kontaktprobleme und die zig. kHz des Digitalsignals der MoBa-Steuerung. Eigentlich bei allen Motörchen, ob drei- oder fünfpolig/keulig, schwankt das Ausgangssignal starkt, teils periodisch, teils auch eher willkürlich, und zwar selbst bei gleichbleibender Drehzahl. Garniert wird das mit positiven oder negativen Spikes, die - würde zu diesem Zeitpunkt gemessen - die Messung krass verfälschen. Hinzu kommt, daß wie oben erwähnt nach dem Puls erst mal die negative Induktionsspannung erscheint und im Anschluß die eigentliche Gegen-EMK-Spannung auch nicht schlagartig kommt sondern anwächst. Wann sie "voll" da ist läßt sich aufgrund deren "natürlicher" Schwankung ohnehin nicht genau sagen. Hinzu kommt in meinem Fall, daß die Regelung etwas "speziell" ist. Sie beruht auf einer festen Pulsdauer (die ggfs. auch eine PWM mit einigen kHz und mit variablem d/c sein kann) und variablen Pausen - während der Pause wird die Gegen-EMK-Spannung ausgewertet und sie endet erst dann, wenn die Elektronik meint, daß die Gegen-EMK-Spannung zu niedrig geworden ist. ich kann also nicht einfach am Ende der Pause messen - denn die Dauer der Pause richtet sich ja nach der Messung. Und Dauermessen und Durchschnittswerte errechnen geht auch nicht, da der PIC während der Pause jede Menge andere Dinge erledigen muß und diese Rechnererei läßt sich nicht, wie die Messung als solche, an integrierte Hardware delegieren. Hinzu kommt, daß sich die Drehzahl natürlich auch auf die Welligkeit/Kurvenform der Gegen-EMK-Spannung und auch die Dauer der negativen Induktionsspannung auswirkt. Bei all diesen "Variablen" frage ich mich also, wann und auf welche Weise ich die Gegen-EMK-Spannung am besten messe, um insgesamt betrachtet das brauchbarste Ergebnis, eine möglichst gleichmäßige Regelung ohne Ruckeln, Zucken, Sprünge zu erhalten. Oder ist die Wahrheit gar, daß es völlig egal ist, sofern nur der Zeitpunkt - z.B. 1ms nachdem die Spannung 0V erreicht hat - immer gleich ist und der Rest sich ohnehin egalisiert. Mit einer Hardware-Filterung - ohnehin eine eigene Frage - läßt sich das sicher entproblematisieren. Üblicherweise gelangt hier die Gegen-EMK-Spannung über eine simple RC-Kombi - z.B. 10k/10n - zum PIC. Um die Welligkeit der Gegen-EMK-Spannung zu glätten reicht das natürlich nicht. Größere Werte verfälschen aber, weil dann sowohl der Puls als auch die negative Induktiosspannung zu stark Einfluß nimmt. Dann wäre eine Messung erst relativ, viel zu lange Zeit nach dem Puls möglich, d.h. die kürzeste Pausendauer recht lang. Was zur Folge hat, daß die Maximalgeschwindigkeit zu sehr reduziert wird. Und die Regelung ineffektiv wird. Das könnte in meiner Vorstellung ähnlich wie ein S&H, wie auch schon angesprochen, etwas gelöst werden - indem die RC-Kombi durch Anschalten des C an Masse erst eine gewisse Zeit, nachdem die Gegen-EMK-Spannung die Null-Linie erreicht hat, aktiviert wird. Was aber noch einen PIC-Ausgang erfordert, den ich nicht habe, also ein größerer PIC. Dadurch wird die Platine aber zu groß. Also eher eine nur theoretische Lösung. > > Mark K. schrieb: >> Wie und wann mißt man am besten die Gegen-EMK-Spannung bei variabler >> Frequenz bzw. d/c und Drehzahl? > Der ideale Messzeitpunkt ist so kurz wie möglich vorm neuen > Ansteuerpuls. Und zwar deshalb, weil man die Pause ja kurz halten will, Ja, bei der herkömmlichen Weise der Regelung, mit fester Pausendauer und einem "richtigen" PID-Regler, wenn man genau weiß, wieviel Zeit man zum Messen hat. Bei festem Puls und variabler Pause, deren Dauer vom Lastzustand abhängt, hilft das nicht. > Du hättest für diese Frage übrigens nur MaWins Link gleich ganz oben > ansehen müssen, dort wird es erwähnt. Hilft, wie gesagt, hier nichts. Und beantwortet übrigens auch in einem solchen Fall nicht wirklich die Frage. Denn auch bei der üblichen Regelung mit fester Pausendauer und PWM-Puls mit veränderlichem d/c ist die Gegen-EMK-Spannung wellig, hat Spikes usw. Selbst wenn man immer nur sozusagen einen Takt vor dem Ende der Pause messen würde wäre das Ergebnis eher zufällig.
Also ich komme mal zur Frage zurück. Auch wenn das vielleicht schon nicht mehr gebraucht wird, da das schon einige Zeit zurück liegt. Ich habe so einen Regler mal aufgebaut. Das funktioniert prima. Zumindest für die Einschränkung, dass man nicht bis auf 0rpm runter kommt. Ich hatte als Testmotor einen 600 DC-Motor aus dem Modellbau Bereich. Der hat sich von etwa 2000rpm bis 20000rpm prima regeln lassen. Das sollte auch für eine Bohrmaschine sein, daher braucht das nicht ultragenau sein. Betrieben wird der Motor über PWM und in den Pulspausen wird gemessen. Der erste Puls, der als Störer auf der Leitung ist, den kann man einfach abwarten. Der ist nicht so lange. Und danach liegt die EMK schön an. Gemessen direkt über Spannungsteiler, differentiell an den ADC des µC. Da war auch nicht so viel Filterei drin. Ganz normal, RC-Glied hat gereicht. Die Drehzahl-Spannungskennlinie habe ich einmal gemessen und fix abgelegt. Fertig war es. Ich lade heute Abend mal Schaltplan und Code hoch. Grüße, Jens
Jens W. schrieb: > Ich hatte als Testmotor einen 600 DC-Motor aus dem Modellbau Bereich. > Der hat sich von etwa 2000rpm bis 20000rpm prima regeln lassen. > Das sollte auch für eine Bohrmaschine sein, daher braucht das nicht > ultragenau sein. Ultragenau muß es hier auch nicht sein, aber um mal einen Eindruck zu geben: Die Regelung muß bis herunter in den einstelligen Drehzahlbereich gehen. Bei hohen Drehzahlen wäre eine Regelung nicht wirklich erforderlich. Es gibt ein paar sehr wenige Modelle mit einer derart günstigen Getriebeauslegung, daß als Minimaldrehzahl einige zig Hz ausreichen. Ich habe bzw. das krude US-Modell einer US-Diesel-Rangierlok mit einer absolut kruden Motor-Getriebekonstruktion, die ungeregelt mit PWM betrieben ausreichend gleichmäßig läuft. Aber das ist die (unrühmliche) Ausnahme, dafür macht die Geräusche ... Aber die Regel ist, daß für eine annähernd vorbildgerechte Minimalgeschwindigkeit die Motordrehzahl deutlich einstellig ist. Und wenn man sich dann auf dem Skop die Gegen-EMK-Spannung anschaut, dann sieht man eigentlich nichts. Da sind wir im mV-Bereich ....
Angehängte Dateien:
-

DC_EMK1.jpg
150 KB

ergänzend zur Schaltung des TO, hier ein weiterer Bauvorschlag aus dem "Fachmagazin" ...
Mark K. schrieb: > Die Gegeninduktionsspannung geht tief in den negativen > Bereich und erst wenn diese vorüber ist hat das Messen überhaupt Sinn. > Und dann steigt sie auch erst langsam an Nein, nach Abbau der Selbstinduktion steigt die Spannung praktisch sofort auf die Tachospannung an. Und verharrt dort praktisch gleichbleibend bis zum nächsten Ansteuerpuls. Natürlich sehr leicht abnehmend, da der Motor ja nur eine begrenzte Schwungmasse hat. Alles was du sonst noch während dieser Phase siehst, liegt am billigen (oder gar entstörten?) Motor... Mark K. schrieb: > während der Pause > wird die Gegen-EMK-Spannung ausgewertet und sie endet erst dann, wenn > die Elektronik meint, daß die Gegen-EMK-Spannung zu niedrig geworden > ist. Nein, die Pausenlänge richtet sich nicht danach, ob die Tachospannung zu niedrig geworden ist. Sie hat eine Mindestlänge, um die Gegeninduktionszeit abwarten zu können. Und sie kann natürlich bis 100% lang werden, wenn die Motordrehzahl bis auf null heruntergeregelt werden soll. Du brauchst für Motor X und Betriebsspannung Y aber eine PWM-Frequenz Z, damit der Motor überhaupt erstmal gestellt werden kann, ohne daß er sättigt, bzw. hohe Pulsströme aufnimmt. Das ist eine andere (höhere) Frequenz, als sein mechanischer Schwung in Zusammenspiel mit der Belastung als Minimum vorgibt. Wobei ich dazu inzwischen wenig sagen kann, solch einfache Steuerungen habe ich früher mal gebaut. Man macht das eh mit z.B. 20KHz und entsprechenden Pulspaketen. So wird das alles leiser, und man bekommt mehr Möglichkeiten, weil das mit der drohenden Sättigung generell vom Tisch ist... Mark K. schrieb: > Üblicherweise gelangt hier die > Gegen-EMK-Spannung über eine simple RC-Kombi - z.B. 10k/10n - zum PIC. > Um die Welligkeit der Gegen-EMK-Spannung zu glätten reicht das natürlich > nicht. Größere Werte verfälschen aber, weil dann sowohl der Puls als > auch die negative Induktiosspannung zu stark Einfluß nimmt. Also einen kleinen Mosfet, der die Messspannung synchron zum Leistungsschalter abschaltet, wirst du je nach Betriebsspannung brauchen. Habe gerade mal eine alte Platine (ohne Schaltplan) überflogen, dort ging es per BSS123 und RC-Glied. Also wurde dauerhaft während der Pause gemessen, wobei sogar die Gegeninduktionsspannung mit einbezogen wurde. Die Schaltung regelte aus dem Gedächtnis heraus trotzdem hervorragend, auch bei sehr niedrigen Drehzahlen. Auf Pulspakete bin ich später aus Lautstärke-Gründen umgestiegen, und hier messe ich tatsächlich am Ende der (unveränderlichen) Pause. Das reicht normalerweise. Und egal von welcher Schaltung ich rede, war das nie nur irgendwelcher simpler 12V-Kram, sondern z.B. 12-60V. Noch dazu rein analog, da null Ahnung vom Programmieren. Und es sollten unterschiedlichste Motoren mit diversen Spannungen und Leistungen angeschlossen werden können. Bei deiner Kleinspannung/Kleinleistung, und auch noch µC, geht das alles doch viel einfacher. Ich denke, du solltest einfach mal was bauen, zuvor weniger negative Theorien beachten ;-) Mark K. schrieb: > um mal einen Eindruck zu > geben: Die Regelung muß bis herunter in den einstelligen Drehzahlbereich > gehen. Sagt einem wenig, wenn man nicht weiß, wie schnell der Getriebemotor maximal werden kann... Also meine (rein analogen) Schaltungen gehen bei vernünftigen Motoren bis etwa 1/100 Nenndrehzahl runter.
Das wird jetzt sehr lang - holt was zu knabbern. Das geht hier in die falsche Richtung. Meine Fragen gehen von der Regelung aus, wie ich sie nun einmal im PIC implementiert habe, nicht auf die Art der (vermutlich besseren) Regelung, wie sie (vermutlich nicht nur in diesem Bereich) üblich ist und wie ich sie in meinem post vom 12.04.2021 16:12 kurz skizziert habe. Da hat es auch keinen Sinn, mit zu empfehlen, das zu ändern - das kann ich nicht. Weder habe ich das gelernt noch sonstwie Ahnung von Regelungstechnik, ich kann keinen PID-Regler konstruieren und noch viel weniger in einem PIC nachbilden. Und außerdem ist das ganze Programm um die gewählte Art der Regelung herum gestrickt und ist mit der hauptsächlichen Arbeit des Programms, die Steuerbefehle der Digitalsteuerung zu dekodieren, so eng verzahnt, daß ich im Ergebnis alles neu programmieren müßte, was ich auch nicht kann - und zwar, weil ich das Programm nicht entwickelt habe sondern nur fortführe. Es ist vielleicht auch sinnvoll, sich dabei einmal die Technik der Modellbahnloks vor Augen zu führen, um die es hier geht. Das sind keine Getriebemotoren, das sind jedenfalls in diesem Bereich teils sehr "primitive" 3- und 5polige DC-Motoren, die meist wirklich als Minimaldrehzahl wenige Hz, in aller Regel, einstellig, bringen müssen, so unglücklich die ganze Kombination auch ist. Und was die langsam ansteigende Gegen-EMK-Spannung (ich kürze sie ab jetzt mit GES ab) betrifft: Dies entspricht meinen Beobachtungen auf dem Speicherskop. Die GES erscheint nach dem Ende der negativen Induktionsspannung nicht plötzlich in "voller Höhe". Aber egal. Um das vorhandene Regelungsprinzip zu erläutern: Das alles geht zur auf Ende der 90er Jahre. Märklin brachte für ihre Digitalsteuerung den ersten Dekoder mit Motorregelung (Lasteregelung genannt) heraus, den sog. 6090- bzw. c90-Dekoder. Den Schaltplan kann man z.B. hier http://www.web-hgh.de/images/decoder/spl/spl_6090-701-13.jpg sehen. Erst mal verwirrend, daher zur Erläuterung: Bis dahin gab es nur Dekoder ohne Regelung, aufgebaut um ein ASIC, in diesem Fall den 701.13. Der dekodierte das Digitalsignal (wurde der Gleisspannung aufgeprägt, Grundlage waren die FB-ICs von Motorola 145026 etc. und deren Protokoll, daher wurde das als Motorala-Format bzw. -System bezeichnet) und steuerte den Märklin-typischen Reihenschlußmotor (RSM) über zwei richtungsabhängige PWM-OC-Ausgänge sowie die Lichtfunktion. Wer diese RSM nicht kennt: Zwei gegenläufig gewickelte Statorspulen waren an einer Seite verbunden, dort an einen Pol des damals noch 3poligen Rotors geschaltet, dessen anderer Pol an Plus hing. Die anderen Statoranschlüsse waren an die Drains zweier MOSFETs geschaltet, die mit der richtungsabhängigen PWM des Dekoder-ICs (hier 701.13) angesteuert wurde. Das alles ist historisch bedingt, weil Märklin seit jeher im analogen Betrieb Wechselspannung verwendet hat; ich will das hier nicht weiter ausführen. Mit diesem 6090-Dekoder wurde der sog. Hochleistungsantrieb oder -motor eingeführt, ein sehr kräftiger DC-Motor in Märklin-üblicher "offener" Bauform. Im Schaltplan sieht man sofort das ASIC 701.13 (dessen erforderliche Peripheriebeschaltung darüber, links und direkt darunter interessiert hier nicht). Die beiden Motor-PWM-Ausgänge (Typ OC) sind Pin 9 und 10. Diese führen zum einen auf ein Flip-Flop aus IC5/6, das den Zweck hat, über T6/7 die low-side-MOSFET-Treiber der Motor-H-Brücke aus IC4/T1/T2 (bitte bedenkt: Das stammt aus den 90ern) richtungsabhängig durchzuschalten. Zum anderen werden sie über R20/21 zusammengeführt und über IC2B, R36-P1 und C1 wird die PWM in eine Steuerspannung für die Regelung bzw. die eigentliche Motoransteuerung konvertiert und über R14 zum Komparator IC2C geführt (im übernächsten Absatz geht es dort weiter). Zugleich wird mit dem Trimmer R36-P1 und C1 ein einstellbares Delay für die Anfahrbeschleunigung und Bremsverzögerung realisiert. T5 dient dazu, daß bei einem Fahrtrichtungswechsel sofort gestoppt wird: Der 701.13 gibt an Pin4 (ebenfalls Typ OC) bei einem Fahrtrichtungswechsel einen kurzen Puls aus, der T5 durchschaltet und so C1 entlädt. Die eigentliche Regelung spielt sich darunter ab, bei IC3B und IC2A, 2C und 2D, wobei die 4 OPs von IC2, ein LM339, OC-Ausgänge haben: Vom Motor - genauer gesagt vom Rotor, rechts oben - wird über zwei Enstörspulen die GES über R1/R2 zusammen- und an den ni-Eingang von IC3B geführt. Dieser OP fungiert in der Beschaltung mit V13/C4/R37-P2 als eine Art S&H/Spitzenwert-Gleichrichter/Filter. Ihr werdet die Funktion sicherlich exakter erklären können. Über den Trimmer R37-P2 läßt sich primär die Höchstgeschwindigkeit einstellen (das Motorola-Format erlaubte nur 14 Fahrtstufen, bei den ungeregelten Dekodern waren meist nur die Hälfte wirklich nutzbar, da sich die Loks meist erst ab FS3 oder 4 bewegten und meist ab um FS12 herum nicht-maßstabsgerecht zu schnell fuhren); zugleich verändert dies aber auch die Mindestgeschwindigkeit und die Effektivität der Regelung. Das Ergebnis ist also die GES als Ist-Größe der Drehzahl/Geschwindigkeit. Die Spannung vom Rotor (sowohl Puslspannung als auch GES) gelangt über R8 auf den i-Eingang des als Komparator geschalteten OP IC2C, wobei über R6/R7/R9 eine offset-Spannung hinzuaddiert wird. Auf den ni-Eingang des OP wird über R14 die aus der PWM des 701.13 gewonnene Steuerspannung geführt. Die genaue Funktion von C2 könnt ihr ebenfalls sicherlich erklären. Der Ausgang von IC2C triggert das aus IC2D gebildete Monoflop - das ist der fixe Motorpuls, mit dem der Motor angetrieben wird. Über R11 gelangt der Puls zu den PNP-high-side-Treibern (FZT705) der Motor-H-Brücke bzw. deren Treiber-T6/T7. Die Funktion von IC2A weiß ich leider nicht mehr; er soll lediglich in einer besonderen Betriebssituation den Motor stoppen, spielt jedenfalls für die Regelung als solche keine Rolle. Die Funktionsweise ist also sehr simpel: Gibt man "Gas", sagen wir mal FS7, was sehr grob einem d/c von 50% entspricht, erscheint also an einem der Motor-PWM-Ausgänge des 701.13 eine PWM, wird der korrespondierende low-side-FET durchgeschaltet und über IC2B eine Steuerspannung erzeugt. Diese wird durch den Komparator IC2C mit der GES verglichen. Ist die Steuerspannung - wie in diesem Moment - größer, so geht der Ausgang von IC2B auf "High" und triggert sozusagen das Monoflop IC2D. Der über IC2D erzeugte Puls - soweit ich mich erinnere ist seine Länge ca. 5ms - schaltet den korrespondierenden PNP-high-side-Treiber und der Rotor bekommt einen Schubs. Durch diesen Puls kommt zugleich über IC3B die volle Betriebsspannung an den ni-Eingang des Komparators IC2B. Der kippt dann logischerweise auf 0V, denn die Steuerspannung an seinem i-Eingang ist ja in jedem Fall niedriger. Jetzt ist der Puls beendet, die Spannung nach IC3B an C4 sinkt auf das Niveau der GES, die natürlich nach diesem ersten Schubs (Puls) praktisch Null ist. Sobald das Niveau der Steuerspannung am ni-Eingang unterschritten ist kippt IC2C wieder auf "High" und löst über IC2D den nächsten Puls von (wie gesagt soweit ich mich erinnere) 5ms aus. Das Spiel wiederholt sich einige Male und es ensteht ein Puls-Cluster aus 5ms-Pulsen mit der Mindestpause dazwischen, die vermutlich (ich mag mich irren) hauptsächlich durch die Beschaltung von IC2C bestimmt wird. Endlich ist die Lok schnell genug. Nach IC3B, an C4, sinkt die Spannung nach dem Ende des Pulses und dem Ende der Gegeninduktionsspannung zwar auf das Niveau der GES. Diese ist aber endlich höher als die Steuerspannung. Der Ausgang des Komparators IC2C bleibt also auf 0V und es wird kein neuer Puls erzeugt. Es tritt also eine Pause ein. Diese dauert solange, bis die Geschwindigkeit soweit abnimmt, daß die nach wie vor via IC3B zugeführte GES an C4 unter das Niveau der Steuerspannung fällt. Dann kippt IC2C wieder auf "High" und über IC2D wird erneut ein Puls von 5ms ausgelöst. Natürlich reicht der eine kurze Puls nicht aus, um die Drehzahl ausreichend zu erhöhen. D.h. die GES ist nach dem Puls immer noch zu niedrig. Nach der Mindestpause wird also der nächste Puls ausgelöst. Es folgt also ein weiterer Pulscluster, dessen Dauer von der aktuellen Belastung abhängt. Und so zeigt es sich auch auf dem Skop: Eine Folge von Pulsclustern, bestehen aus 5ms-Pulsen getrennt durch die Mindestpause, mit variiender Länge (bzw. Zahl von Pulsen), manchmal auch ein einzelner Puls oder ein sehr kurzer Cluster, jeweils getrennt von langen Pausen unterschiedlicher Länge, die mit zunehmender Last kürzer werden, bis unter der höchsten Last durchgehend 5ms-Pulse mit Mindestpause zu sehen sind. Damals, das war um die Jahrtausendwende, gab es jedenfalls im Amateur-Hobby-Bereich nicht viel mehr als den 16F84 und das war damals schon eine tolle Sache. Um diesen herum wurde dieser DIY-Dekoder, auf den das alles zurückgeht, entwickelt, wobei im Mittelpunkt natürlich die Dekodierung des Digitalsignals stand und natürlich ohne Regelung, als deutlich besseren Ersatz für die damaligen nicht geregelten Märklin-Dekoder. Der damalige Programmierer und Entwickler entschied sich vermutlich aus damals guten Gründen dafür, die PWM-Erzeugung mit der Signaldekodierung zu verbinden, und das ist bis heute so geblieben. Als der nicht geregelte Dekoder gut lief dachte man eine Version mit Regelung (und vieles andere). Da an einen "richtigen" PID-Regler mit festem Takt und variabler PWM, wie oben skizziert und später die Regel, aus vielen Gründen nicht zu denken war, entstand der Gedanke, dieses Regelungsprinzip des 6090-Dekoders zu übernehmen, und zwar natürlich nicht mit der externen Beschaltung um IC3B und IC2C sondern alles im PIC, was sich auch gut mit der Struktur des Programm vertrugt. Das führte über all die Jahre und vielen Pausen/Auszeiten über mehrere programmierende Beteiligte zum gegenwärtigen Zustand. Der vorherige Programmierer hatte sich mit einem simplen Komparator begnügt und die Folgen dieses wenig differenzierenden Ansatzes durch eine großzügig dimensionierte R-Trimmer/C-Kombi vor dem GES-Signaleingang glattgebügelt. Dies hatte naturgemäß eine wenig effektive Regelung zur Folge, was ihm aber genügte. Ich sehe das anders und habe mich bemüht, die Möglichkeiten der Digitaltechnik an dieser Stelle zu nutzen, wobei ich aber durch die enge Verzahnung von Motorsteuerung mit Signaldekodierung (was sehr zeitkritisch ist) gehandicapt bin, das Konzept aber wie gesagt mangels weitergehender Kompetenz beibehalten muß. Das Ergebnis ist zwar recht ordentlich, aber das gegenwärtig verbliebene Problem ist, daß manche Motoren/Modelle in manchen Betriebszuständen unruhig in dem Sinne laufen, daß sie "unmotiviert" einen Sprung machen. D.h. es wird zu "unrecht" ein Pulscluster ausgelöst. Auf dem Speicherskop ist dies deutlich zu sehen, wobei in diesen Situationen eine unverhältnismäßig lang erscheinende Pause vorausgeht. Was ja auch einleuchtet: Bei "zu" langen Pausen sinkt die Geschwindigkeit - wir reden hier vom sehr niedrigen Geschwindigkeitsbereich - so weit ab, daß lange Cluster zur Beschleunigung erforderlich sind, usw. Aber egal, im Nebel zu stochern ist nicht sinnvoll, ich möchte erst mal mögliche Fehler durch ein suboptimales Meßverfahren ausschalten. Daher meine Fragen im Ausgangspost, auf die ich ausdrücklich verweisen möchte. Denn leider sind die Motoren höchst unterschiedlich und deren "output" ist ebenfalls von sehr unterschiedlicher Qualität. Bei vielen Motoren ist deutlich zu sehen, daß häufig genug nach dem Ende der negativen Induktiosspannung für einige Zeit überhaupt keine GES auftritt. Andere verhalten sich so, wie sie es theoretisch sollen - da kommt zuverlässig nach der negativen Induktionsspannung die GES. Wäre dies die Regel, dann wäre es wenig problematisch.
Sehr gut beschrieben, das Verfahren tönt auch logisch und ich habe erwähnt das kleinleistungs Motörchen nicht besonderlich stabil laufen und shclcht mittels EMK gesteuert werden können, der Grund lieg unter anderem in dem was du beschreibst. ich muss ehrlich zugeben als die Elektronik bei Märklin digital wurde war auch gleichzeitig mein Modelbahn interesse bereits am abklingen. Habs aber immer mal mitverfolgt im Elektor mit all seinen Beschrieben und Schaltungen.
Grundsätzlich lassen sich die kleinen Modellbahnmotoren schon sehr ordentlich regeln. Die 6090-Elektronik war natürlich für den 6090-Motor, den sog, Hochleistungsantrieb, ausgelegt, und wollte man damit die verschiedenen, auf DC umgebaute RSM von Märklin betreiben (dafür gab es einige DIY-Methoden), dann war das Ergebnis nicht zwingend perfekt, von dem "kernigen" Klang der 6090-Regelung (war halt vergleichsweise niederfrequent) nicht zu reden. Später hat Märklin die Regelung in ASISC integrieren lassen, das war einerseits besser, andererseits konnte man nichts mehr dran herumdrehen. Aber schon ab Mitte der 2000er regelten die kommerziellen uC-Dekoder der meisten Anbieter sehr ordentlich bis perfekt und wenn man die Geduld der aufwendigen Einstellung und Parametrisierung aufbringt bekommt man heute damit jeden Motor zum guten Laufen. Aber etwas Fertiges zu kaufen ist natürlich keine Lösung, dann könnte man das Forum zumachen, zumal hier ... aber egal, das warum spielt keine Rolle. Ich vermute, ich könnte die verbliebenen Probleme lösen, wenn ich die GES nicht über eine einfache RC-Kombi dem PIC zuführe sondern die Beschaltung um IC3B einfüge.
wird die lock immer noch mit mäuseklavier konfiguriert ?
:-)) Das Mauseklavier gehört längst der Vergangenheit an. Zumal das bei Märklin nur für die Adreßeinstellung zuständig war. Es gab wohl auch mal Dekoder von Drittanbietern, bei denen das Delay oder so darüber eingestellt wurde, aber "unser" Dekoder war seit jeher ontrack-programmierbar und das ist m.W. seit vielen Jahren überall Standard.
Hi Mark, eine tolle Beschreibung und ich wünsche euch, dass ihr die Probleme mit der EMK in den Griff bekommt. Da klar ist, dass die Qualität der Regelung mit der "Ist-Größe" steht und fällt, wäre da auch mein erster Ansatzpunkt: Mark K. schrieb: > sondern die > Beschaltung um IC3B Zu den "unmotivierten" 5ms-Pulsfolgen sehe ich als Grund vielleicht die Komparatoreinstellung. Leider ist die aber nichts wert, wenn die Signale schlecht sind. Da hilft nur messen. Schlecht für den Erfolg des Gesamtprojekts halte ich, dass ihr nicht mehr in die Programmierung eingreifen könnt. Einfach ins Blaue geraten, wäre mir die angedeutete zeitliche Verquickung von Motorregelung und Signaldekodierung nicht geheuer. Wenn die Software ein Pulstelegramm erkannt und bearbeitet hat, kann sie, wenn nötig, regeln...sonst bleibt beim Motor so lange alles beim Alten. Zweiter Nachteil ist sicher, dass die Regelung rein analog erfolgt. Einlesen der EMK über einen ADC könnte die ganze Signalqualitätsbearbeitung möglicherweise entscheidend verbessern. Und da ihr bei Märklin H0 ja eigentlich genug Platz habt, wäre sogar denkbar, die Regelung mit einem zweiten Controller zu machen. Aber ich schweife jetzt ab... Viel Erfolg und Gruß, Rainer
ich hab grade einen test mit einem kleinen 9v Motörchen aus einem Spielzeug gemacht, urteil: EMK sinvoll auswerten unmöglich. Das Teil hatte ein furchbares verhalten, induktions spitzen viel zu energiereich eine EMK war nicht wirklich verlässlich messbar, mit 5khz gar nicht sichtbar .. mit 100hz so lala .. mit 10 hz konnte man einigermassen in einem engen Fenster die EMK erkennen, mit einem Maxon 80W wunderbar messbar selbst bei 16khz bis zu 85 % pulsbreite Übrigens der schlecht geredete 775/789 verhielt sich gleich wie der 15 fach teurere Maxon
Roger schrieb: > ich hab grade einen test mit einem kleinen 9v Motörchen aus einem > Spielzeug gemacht, urteil: EMK sinvoll auswerten unmöglich. Wie der TO schon angemerkt hat, ist heute zumindest diese Lastregelung bei allen käuflichen Lokdekodern vorhanden und funktioniert auch! Wie "minderwertig" nun einzelne Motoren auch sein mögen, mit einem "9V Motörchen" aus der Legokiste kann man sie bestimmt nicht vergleichen. Wenn ich eine Minitrix-Lok für 300€ kaufe, dann erwarte ich, dass die einwandfrei läuft! Der TO hat ja sicher ein anderes Problem. Warten wir's ab. Gruß Rainer
ne schon klar, es ging mir auch nicht um den vergleich direkt mit einem märklin motor, aber um aufzuzeigen das kleinmotoren sich eben nicht gleich verhalten wie grosse also die damals aus den alten zeiten in meinen märklin loks waren alles andere als hochwertigaber klar die wurden auch sehr schnell ersetzt Gut liefen Fleischman loks mit gleichrichter... damals in der vor elektronik zeit
Rainer V. schrieb: > Der TO hat ja sicher ein anderes Problem. Ja. Und ich denke, es ist nicht technischer, sondern ideeller Natur. Seine Fragen wurden ihm jetzt mehrfach beantwortet, aber er bleibt skeptisch, bzw. weiß es immer besser. Hub ab für seinen ganzen Einsatz für die Sache, aber mit so pedantischer Einstellung klappt das niemals real. Er scheint ja jedes Elektron erstmal infrage zu stellen, dabei ist das nun wirklich keine Raketenwissenschaft. Da jetzt rausgekommen ist, daß er gar nichts bauen will/kann, frage ich mich, was die eigentliche Frage ist/war? Ich weiß es aktuell wirklich nicht, möglicherweise geht das in einer der Kurzgeschichten auf Seite 38 hervor, und ich habe es überflogen, sorry... Vielleicht hätte die Eingangsfrage besser gelautet: "Modelleisenbahner: Märklin Steuerung XYZ Revision 1.4 muss gemäß Schaltplan 7 an Komparator 15 geändert werden. Habt ihr eine Idee?" Dann hätten ich und viele andere nicht sinnlos Pulver verschießen müssen. Mark K. schrieb: > Bei vielen Motoren > ist deutlich zu sehen, daß häufig genug nach dem Ende der negativen > Induktiosspannung für einige Zeit überhaupt keine GES auftritt. Dazu gibt es keine logische Erklärung, und es passt auch zu keinem von sicher 100 Motoren, die ich im Laufe von Jahren gemessen habe. Ein DC-Motor wird augenblicklich zum Tachogenerator, nachdem der Strom in seiner Induktivität abgebaut ist. Von minimalen Verzögerungen durch seine Windungskapazitäten mal abgesehen, deren Einfluss mehrere Größenordnungen unter den Zeiten liegen, mit denen man es hier zu tun hat.
Uwe S. schrieb: > Ein > DC-Motor wird augenblicklich zum Tachogenerator, nachdem der Strom in > seiner Induktivität abgebaut ist Ja und ich denke auch, dass der TO seine Probleme eben aus dem analogen Teil der Motorregelung bekommt, verbunden mit der "gegossenen" Software. In dieser Situation würde ich versuchen, die beiden Teile zu trennen. Also erst mal eine "nackte" analoge Mototregelung und wenn die läuft, dann kann man den Controller wieder dranfrickeln. Ist aber durchaus möglich, dass die analoge Regelung einfach scheitert. Insgesamt eine gewaltige Aufgabe, aber sicher nicht unlösbar. Wo ein Wille ist :-) Gruß Rainer
Uwe S. schrieb: > Ja. Und ich denke, es ist nicht technischer, sondern ideeller Natur. > Seine Fragen wurden ihm jetzt mehrfach beantwortet, aber er bleibt > skeptisch, bzw. weiß es immer besser. Quatsch. Meine Fragen wurden eben nicht beantwortet. > Hub ab für seinen ganzen Einsatz für die Sache, aber mit so pedantischer Ja, in der Tat, ich finde es auch toll, daß ich nur deswegen meinen jahrzehntelangen Widerstand, PIC(uC-)-Programmierung zu erlernen, aufgegeben habe und das mittlerweile recht ordentlich beherrsche. Ist ja doch etwas ganz anderes als in 8088-Assembler zu aasen > Einstellung klappt das niemals real. Er scheint ja jedes Elektron > erstmal infrage zu stellen, dabei ist das nun wirklich keine > Raketenwissenschaft. > Da jetzt rausgekommen ist, daß er gar nichts bauen will/kann, frage ich > mich, was die eigentliche Frage ist/war? Ich weiß es aktuell wirklich > nicht, möglicherweise geht das in einer der Kurzgeschichten auf Seite 38 > hervor, und ich habe es überflogen, sorry... Ja, das ist wirklich ein Problem, daß man kaum etwas (praktisch nichts) liest aber mitredet und meint, eine Meinung haben und eine Bewertung abgeben zu können. Hättest Du gelesen, dann wüßtest Du, daß Du so was von daneben liegst ... Ich wiederhole es nicht, ich frage mich aber immer wieder, warum man sich in einem traditionellen - gar Elektronik-bezogenen, also schon irgendwie wissenschaftlichen und daher textlastigen - Forum, in dem Texte nun mal im Mittelpunkt und Vordergrund stehen, beteiligt, andererseits aber anscheinend beim Lesen Schmerzen hat und dieses daher tunlichst vermeidet. Oder ist das eine Generationenfrage? > Vielleicht hätte die Eingangsfrage besser gelautet: "Modelleisenbahner: > Märklin Steuerung XYZ Revision 1.4 muss gemäß Schaltplan 7 an Komparator > 15 geändert werden. Habt ihr eine Idee?" > Dann hätten ich und viele andere nicht sinnlos Pulver verschießen > müssen. Ich muß leider konstatieren, daß Du zwar einiges geschrieben hast, zur Beantwortung meiner Fragen - und um diese geht es in diesem Fred - nichts beigetragen hast. > Mark K. schrieb: >> Bei vielen Motoren >> ist deutlich zu sehen, daß häufig genug nach dem Ende der negativen >> Induktiosspannung für einige Zeit überhaupt keine GES auftritt. > > Dazu gibt es keine logische Erklärung, und es passt auch zu keinem von > sicher 100 Motoren, die ich im Laufe von Jahren gemessen habe. Ein > DC-Motor wird augenblicklich zum Tachogenerator, nachdem der Strom in > seiner Induktivität abgebaut ist. Von minimalen Verzögerungen durch > seine Windungskapazitäten mal abgesehen, deren Einfluss mehrere > Größenordnungen unter den Zeiten liegen, mit denen man es hier zu tun > hat.
Rainer V. schrieb: > Ja und ich denke auch, dass der TO seine Probleme eben aus dem analogen > Teil der Motorregelung bekommt, verbunden mit der "gegossenen" Software. > In dieser Situation würde ich versuchen, die beiden Teile zu trennen. > Also erst mal eine "nackte" analoge Mototregelung und wenn die läuft, > dann kann man den Controller wieder dranfrickeln. Ist aber durchaus > möglich, dass die analoge Regelung einfach scheitert. Insgesamt eine > gewaltige Aufgabe, aber sicher nicht unlösbar. Wo ein Wille ist :-) Wie kommt ihr auf "analoge Regelung"? Ich habe doch ausdrücklich erklärt, daß wir "lediglich" das Prinzip der 6090-Regelung in ein PIC-Programm übernommen hatten, weil wir damals keine andere Möglichkeiten hatten und dies als die einfachste Lösung erschien (ohne allerdings - vor 20 Jahren - auf ein Speicherskop zugreifen zu können und zu wissen, wie die Spannungen und Signale wirklich aussehen). "Analog" und "digital" sind hier ohnehin falsche Begriffe. Analog ist jede GES-Regelung, denn der Meßwert ist analog und ob er nun "draußen" mit einem Komparator "analog" ausgewertet wird oder "drinnen" nach Digitaliserung als binär dargestellter/verarbeiteter numerischer Wert ist insofern Wumpe. "Digital" ist aber auch die alte diskreten 6090-Regelung mit OP, denn der Vergleich zwischen Ist und Soll führt zu einem digitalen, ja sogar einem binären Wert, nämlich Low oder High, Masse oder Plus, am Ausgang des OP IC2C und in weiterer Folge entweder zu einem Puls am Ausgang vom OP IC2D oder eben keinem Puls, also ebenfalls digital-binär. Im Grunde genommen ist diese Art der Regelung über die Pausendauer sogar noch "digitaler" bzw. "binärer" als die übliche bzw. klassische Regelung mit PID-Regler, da bei dieser u.a. auch die Größe der Differenz zwischen Ist und Soll in das Ergebnis einfließt, während hier auch bei der diskreten 6090-Regelung nur eine kleiner/größer-Entscheidung mit einem Low oder High als Ergebnis erfolgt. Zwar wird der eine oder andere nach diesen 20 Zeilen schon nicht mehr lesen, daher kann ich es mir eigentlich auch sparen, aber dennoch noch einmal: Die GES wird über den üblichen 2x10k Spannungenteiler und einen Filter-C gegen Masse, parallel dazu eine Schottky-Klemmdiode nach Masse, dem A/D-Eingang des PIC zugeführt. Und "gegossen" ist die Software nur insofern, als ich die Grundstruktur faktisch nicht ändern kann und daher hinsichtlich der Möglichkeiten, die digitalisierte GES aufwendig zu filtern und zu verarbeiten, beschränkt bin. Die Betonung liegt bei "aufwendig", aufgrund der vorrangigen Dekodierung der Befehle der Digitalsteuerung ist nun mal nicht viel Zeit. Gleichwohl habe ich hier schon sehr viel Code reingepackt und dazu auch die Möglichkeiten, etwas am timing zu drehen, ausgeschöpft. Nur sind irgendwann eben die Grenzen erreicht.
Uwe S. schrieb: > Mark K. schrieb: >> Bei vielen Motoren >> ist deutlich zu sehen, daß häufig genug nach dem Ende der negativen >> Induktiosspannung für einige Zeit überhaupt keine GES auftritt. > Dazu gibt es keine logische Erklärung, und es passt auch zu keinem von > sicher 100 Motoren, die ich im Laufe von Jahren gemessen habe. Ein > DC-Motor wird augenblicklich zum Tachogenerator, nachdem der Strom in > seiner Induktivität abgebaut ist. Von minimalen Verzögerungen durch > seine Windungskapazitäten mal abgesehen, deren Einfluss mehrere > Größenordnungen unter den Zeiten liegen, mit denen man es hier zu tun > hat. Tja, und deswegen bin ich auch ratlos, zumal ich alles andere als ein Motorenexperte bin. Ich habe zwar keine hundert Motoren durchgemessen sondern nur etwa ein Dutzend, und dies auch beschränkt auf den Modellbahnbereich und auch erst dann, als und weil ich mir die fallweise auftretenden Probleme der Regelung aufgrund der mir natürlich bekannten Theorie (und dem einwandfreien Funktionieren mit anderen Motoren/Modellen) schlichtweg nicht erklären konnte. Ich habe diese Spannungsverläufe aufgezeichnet und irgendwo archiviert, könnte sie also als Bild posten. Was aber vermutlich nicht viel helfen wird. Es ist aber eine Tatsache, daß dieses Phänomen bei z.B. den fünfpoligen (schräggenuteten) Motoren, wie sie in vielen DC-Loks verwendet werden, nicht auftritt sondern - soweit ich mich erinnere ausschließlich - bei einigen, aber nicht allen, der "alten" (im Sinne von "traditionell") Märklin-Motoren.
Ich vergaß: Rainer V. schrieb: > Also erst mal eine "nackte" analoge Mototregelung und wenn die läuft, > dann kann man den Controller wieder dranfrickeln. Ist aber durchaus Auch das habe ich bereits mehrfach geschrieben, aber noch einmal: Die Regelung hat schon relativ brauchbar funktioniert, als ich vor zwei Jahren das Projekt auch programmiertechnisch übernommen habe, wenn auch durch eine recht großzügig dimensionierte R-Trimmer/C-Kombi vor dem A/D-Eingang des PIC, was die Effektivität der Regelung für meinen Geschmack viel zu sehr beeinträchtigt hat. Könnte ich euch das Ergebnis nach meiner langwierigen Bitpfriemelei vorführen würdet ihr überrascht sein, wie gut das funktioniert und bei Vorführung der "richtigen" Loks fragen, wo denn hier ein Problem bestehe. Also: Die Regelung funktioniert sowohl grundsätzlich als auch nach meinen Verbesserungen allgemein gut, nur gibt es in bestimmten Betriebs-/Lastzuständen und mit manchen Motoren das beschriebene Probleme der "Sprünge".
Sorry wenn ich dich da streckenweise falsch verstanden habe. Du hast also einen funktionierenden Regler, der bei einigen Motoren "Mist" macht. Das ist natürlich eine elende Situation, denn du müstest über längere Meßreihen definitiv herausfinden, was die Ursachen für diese Störung sind. Ich habe deshalb von analoger Regelung gesprochen, weil mir diese 5ms-Aussetzer eben als Störungsspikes vorkommen, die den Komarator eben falsch triggern. Natürlich kann ich damit völlig falsch liegen, zumal ich ja nicht weiß, was ihr im PIC alles mit dem Meßwert anstellt. Fehlersuche halte ich wie gesagt für einigermassen aufwändig, sodass ich fast geneigt wäre vorzuschlagen, die betroffenen Motoren einfach auszuwechseln. Trotzdem aber viel Erfofg weiterhin! Gruß Rainer
Rainer V. schrieb: >> sondern die >> Beschaltung um IC3B > Zu den "unmotivierten" 5ms-Pulsfolgen sehe ich als Grund vielleicht die > Komparatoreinstellung. Leider ist die aber nichts wert, wenn die Signale > schlecht sind. Da hilft nur messen. Schlecht für den Erfolg des Noch einmal: Die alte 6090-Schaltung habe ich nur gepostet um zu erklären, wie wir auf dieses Prinzip der Regelung gekommen sind. Wir verwenden diese Schaltung natürlich NICHT (obwohl, wie geschrieben, mir manchmal der Gedanke kommt, ob es nicht helfen würde, den Teil um IC3B herum zur Signalformung vor den A/D-Eingang einzufügen). Die Regelung wird allein im PIC ausgeführt - die GES wird über den üblichen 2x10k-Spannungsteiler an den A/D-Eingang des PIC geführt, dort liegt lediglich noch ein C und eine Schottly invertiert gegen Masse. > eingreifen könnt. Einfach ins Blaue geraten, wäre mir die angedeutete > zeitliche Verquickung von Motorregelung und Signaldekodierung nicht > geheuer. Wenn die Software ein Pulstelegramm erkannt und bearbeitet hat, > kann sie, wenn nötig, regeln...sonst bleibt beim Motor so lange alles > beim Alten. Zweiter Nachteil ist sicher, dass die Regelung rein analog Natürlich ist diese Lösung ex post betrachtet suboptimal. Und wäre ich in der Lage dies alles, vor allem die Signaldekodierung, eingeständig zu programmieren, würde ich das ganz anders strukturieren. Aber dann wäre ich sicher auch in der Lage, einen PID-Regler zu programmieren, und dann wäre es ohnehin eine ganz andere Situation. Aber die Auswertung der GES wird durch die Signaldekodierung nicht beeinträchtigt. Das Gegenteil ist der Fall. Verbringt der PIC zuviel Zeit mit der GES-Auswertung (damit meine ich nicht die A/D-Wandlung als solche, das sind ja peanuts), Bildung von Durchschnittswerten, Detektion von "Ausreißern", zu langen Pausen und was ich mir sonst noch bei dem Versuch, die "Sprünge" im Ergebnis zu vermeiden, habe einfallen lassen, dann klappt die Signaldekodierung nicht mehr. Außerdem ist die Regelung als solche gar nicht so zeitkritisch. Ob "sofort" oder erst im folgenden Zyklus - nach z.B. nach 5ms oder 10ms (die 5ms Puls betrafen nur die 6090-Schaltung und den dafür bestimmten Motor - ich verwende hier einstellbare Pulsdauern, je nach Fahrzeug und Motor, die überdies bei Bedarf/hoher Last auch verlängert werden) - nachgeregelt wird, spielt in der Praxis keine Rolle. Im Gegenteil. In einigen Betriebssituationen ist meine Regelung deutlich zu schnell/effektiv: Bei Verringerung der Fahrtstufe ist häufig ein deutlicher und störender Bremseffekt zu sehen und zu hören, d.h. regelungsbedingt erfolgt ein Pause, bis die niedrigere Sollgeschwindigkeit erreicht ist, so daß der Motor für einige zig oder hundert ms spannungslos ist. In der diskreten 6090-Schaltung wird dies "analog" (diesmal richtig ;-)) ausgebügelt; im PIC habe ich das noch nicht hinbekommen. Bei Erhöhung der Fahrtstufe gilt das entsprechend. Das hängt natürlich auch an der internen Auflösung der Geschwindigkeitsstufen und dem Umstand, daß sich dies nur im niedrigen Geschwindigkeitsbereich bemerkbar, wodurch sich die Auflösung noch weiter reduziert. Daher habe ich bei zuviel Herumgerechne an der GES die Routinen in zwei oder drei Teile aufgespalten, so daß die Regelung erst mit vielleicht 10 oder 150ms "Verspätung" reagiert - was völlig problemlos ist (hier wird ja kein AKW geregelt). > erfolgt. Einlesen der EMK über einen ADC könnte die ganze > Signalqualitätsbearbeitung möglicherweise entscheidend verbessern. Und > da ihr bei Märklin H0 ja eigentlich genug Platz habt, wäre sogar > denkbar, die Regelung mit einem zweiten Controller zu machen. Aber ich > schweife jetzt ab... Ich habe es schon so oft gesagt: Hier erfolgt alles im PIC und natürlich wird die GES über den A/D-Eingang des PIC erfaßt und digitalisiert. Wie kommst Du nur auf den Gedanken einer "analogen" - gemeint ist wohl: diskret aufgebauten - Regelung? Welchen Sinn sollte dann der PIC haben? Außerdem geht es nicht nur um Märklin-Loks. Zwar ist in vielen älteren Loks vergleichsweise viel Platz. Aber viele neuere Loks sind ja schon als DC-Loks (Trix) konzipiert und haben nur Platz für Dekoder der üblichen Größe. Und ich habe deutlich mehr umgebaute DC-Loks als Märklin-Loks, muß also schon aus diesem Grund darauf achten, daß der Decoder möglichst klein ist - aber natürlich auch aus dem sportlichen Ehrgeiz, mit so wenig Bauteilen wie möglich auszukommen, zumal ich als Hobbyist nicht auch nur ansatzweise so klein und eng bestücken kann wie die kommerziellen Anbieter, deren Dekoder mittlerweile ja kaum noch zu reparieren sind, von der DIY-Herstellung der Platinen nicht zu reden.
Rainer V. schrieb: > Störung sind. Ich habe deshalb von analoger Regelung gesprochen, weil > mir diese 5ms-Aussetzer eben als Störungsspikes vorkommen, die den > Komarator eben falsch triggern. Natürlich kann ich damit völlig falsch Nein, so ist das nicht. Vom Fahrverhalten zeigt sich dieses "spinnen" in unmotivierten (also keinerlei Hemmnisse wie schwergängige Weichenfahrten, Gestängeklemmen, mechanische Motor-/Getriebeprobleme oä.) "Springen" in Fahrtrichtung. In dem aufgezeichneten Signal (am Motor bzw. Puslausgang des PIC) ist auffällig, daß dann, wenn die Lok/Motor aufgebockt laufend "ruckelt" (natürlich ist das nicht die konkrete Betriebssituation des "Springens", weil die Last durch eben das Fahren fehlt) meist recht und zu lange Pausen auftreten, die dann natürlich zu heftigen Pulsclustern führen, die zusammen das Ruckeln bewirken. Manchmal erscheinen auch zwischendurch, sozusagen "irregulär", einzelne Pulse oder kurze Pulscluster. Nicht bei jedem Motor. Ich habe das Problem der zu langen Pausen durch Limitierung der maximalen Pausendauer zwar etwas entschärfen können, aber das ist nur ein workaorund und nicht perfekt und kostet mit allem drumherum recht viel Rechenleistung und Zeit, greift nicht die Ursache an. Ich vermute auch, daß jedenfalls ein Teil des Problems auf diesen "logisch nicht erklärbaren" Verhalten mancher Motoren, daß nach der negativen Induktionsspannung die GES nicht oder nur verspätet oder nur langsam oder nur viel zu gering kommt, beruht, möglicherweise aber auch auf einer suboptimalen Meßstrategie/-prozedur - und gerade darauf zielen meine konkreten Fragen in meinem initialen post. Es ist natürlich ein Unterschied, ob wie in der diskreten 6090-Schaltung nach dem Puls erstmal die volle Betriebsspannung am Eingang des Komparators anliegt, die dann bis auf das Niveau der tatsächlich entstehenden GES abfällt, oder ob nach dem Puls die dank Klemmdiode verbleibenden ca. -0,3V aus der Gegeninduktionsspannung (im übrigen bin ich nach wie vor nicht wirklich überzeugt, daß auch die Gegeninduktionsspannung bei einem großen negativen Pegel abrupt endet und dann ebenso abrupt die positive GES in voller Höhe erscheint) anliegen, diese auf 0V hochklettert und erst danach die GES - und nach meinen Beobachtungen über einen gewissen Zeitraum ansteigend - auftritt - wenn der Motor sich wie so wie beschrieben "irregulär" verhält. Und wenn sich außerdem die GES nicht schön gleichbleibend darstellt sondern extrem wellig und mit Spikes versehen - dann mag die Beschaltung um IC3B herum große Vorteile bringen und solche "Ausreißer" verhindern. > liegen, zumal ich ja nicht weiß, was ihr im PIC alles mit dem Meßwert > anstellt. Ursprünglich nichts. Er wurde einfach mit dem Soll verglichen. Ich habe dann erst mal so lange gewartet, bis überhaupt eine GES gemessen wurde und dann über die letzten 8 Zyklen aufaddiert und den Durchschnitt ermittelt (mit Bitschiebeoperationen geht das ja schnell) - ist natürlich kein richtiger Durchschnitt, aber das wäre viel zu aufwendig und zeitraubend. Ist halt keine Ressource für eine aufwendige "Bearbeitung" vorhanden. > Fehlersuche halte ich wie gesagt für einigermassen aufwändig, Das kannst Du laut sagen. Lebenszeitvernichtung. > sodass ich fast geneigt wäre vorzuschlagen, die betroffenen Motoren > einfach auszuwechseln. Trotzdem aber viel Erfofg weiterhin! Aufgeben? Niemals. Naja, vielleicht niemals, aber Motorwechsel bei Märklin-Loks ist definitiv keine Option. Im schlimmsten Fall muß ich bei den besonders arg betroffenen Motoren eben, wenn auch widerstrebend, die GES hardwaremäßig "verbessern", wenn auch auf Kosten der Effektivität der Regelung, wenn es schon nicht möglich ist, die eigentliche Ursache zu finden und zu beseitigen. Aber der Vorteil der Regelung im PIC ist ja, daß man differenziert und gezielt Problem angehen kann und nicht grobschlächtig mit einer passenden R/C-Kombi alles wegbügelt.
Angehängte Dateien:
-

bemfMeas.png
54 KB -

stepresponse.png
4,7 KB
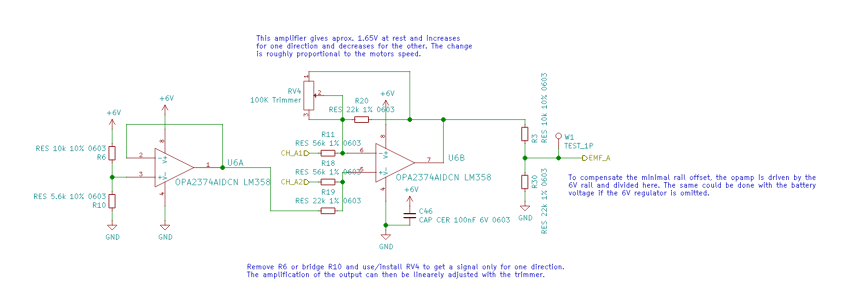
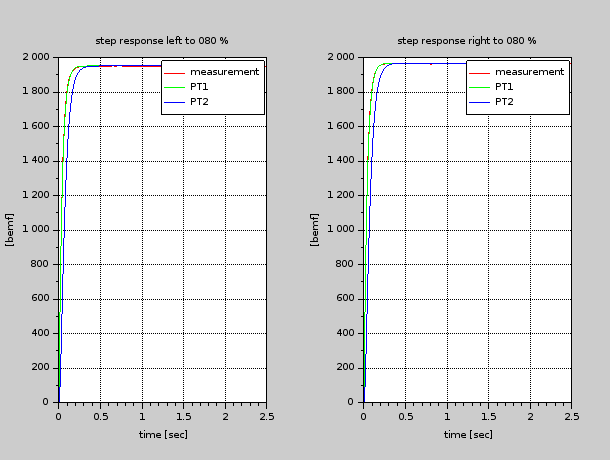
{kind=link}
{kind=link}
Hallo zusammen, ich befasse mich momentan mit dieser Thematik zur Regelung eines Roboters mit Differenzialsteuerung. Die Messschaltung wurde um den Operationsverstärker LM358 realisiert. Die Ruhespannung am Messausgang liegt bei ca. 1,6V, sodass man die Drehzahl in beide Umdrehungsrichtungen bestimmen kann. Außerdem arbeitet die Schaltung mit 6V Versorgungsspannung, sodass der rail offset des Opamps kompensiert und der volle Messbereich des ADCs ausgenutzt werden kann. Zur Bestimmung der Sprungantwort wird alle 25ms in einer ISR gemessen. Zuerst werden die Enable Pins der zugehörigen Motortreiber (IFX007T) auf LOW gesetzt. Nachdem eine feste Zeit abgewartet wurde, bis sich die Gegen-EMK-Spannung aufgebaut hat, werden mehrere Messungen gemacht und der Median ermittelt. Zusätzlich wende ich auf die Messwerte noch einen Tiefpassfilter an. Ich habe die Sprungantworten beider Motoren mit Scilab dargestellt und ein Skript geschrieben, welches das System als PT1- oder PT2-Übertragungsglied zur Bestimmung der Reglerparameter annähert. Momentan verwende ich einen bandbegrenzten PI(-T1) Regler. Das ganze funktioniert stabil ab ca. 20% der maximalen Motordrehzahl.
Mark K. schrieb: > Ich muß leider konstatieren, daß Du zwar einiges geschrieben hast, zur > Beantwortung meiner Fragen - und um diese geht es in diesem Fred - > nichts beigetragen hast. Nein, überhaupt nichts, lediglich genau das, was du wissen wolltest. Und Dinge, die du zuvor noch nicht mal bemerkt hattest. Wie denn auch, wenn du zeitlebens nur mit irgendwelchen Fertigsystemen hantiert hast? Genau DAS verursacht ja erst den ganzen sinnlosen Thread. Also dann alles Gute, und viel Erfolg bei der Lösung deines Problems.
Uwe S. schrieb: > Mark K. schrieb: >> Ich muß leider konstatieren, daß Du zwar einiges geschrieben hast, zur >> Beantwortung meiner Fragen - und um diese geht es in diesem Fred - >> nichts beigetragen hast. > Nein, überhaupt nichts, lediglich genau das, was du wissen wolltest. Nein. > Und Dinge, die du zuvor noch nicht mal bemerkt hattest. Wie denn auch, > wenn du zeitlebens nur mit irgendwelchen Fertigsystemen hantiert hast? Liest Du eigentlich überhaupt irgendetwas von dem, was hier geschrieben wird? Du phantasierst Dir schon wieder einiges zusammen .... erst behauptest Du, ich wollte nichts bauen, jetzt behauptest Du, ich hätte mein Leben lang nur mit irgendwelchen Fertigsystemen hantiert ... was soll das? Weder kennst Du mich noch weißt Du, was ich in den vergangenen fast 50 Jahren an Elektronik gebaut (und entwickelt) habe > Genau DAS verursacht ja erst den ganzen sinnlosen Thread. Nein, Leute mit Verbalabsonderungen wie Du.
Mark K. schrieb: >> Nein, überhaupt nichts, lediglich genau das, was du wissen wolltest. > > Nein. Doch: Mark K. schrieb: > daher möchte ich > mal fragen. wie man bei einer im subj. genannten Regelung die > Gegen-EMK-Spannung am besten mißt - zu welchem Zeitpunkt, über welche > Zeit oder wie. Genau das habe ich beantwortet. Bei hochfrequenten Pulspaketen misst man zum Ende der Pause. Bei einfachen Steuerungen, bei denen die Pause Teil der Pulsweite ist, misst man nach Entladen der Motorinduktivität die gesamte Pause über. Alles darüberhinaus ist eh Quatsch, weil man chaotische Tachospannungen ggf. nicht aufwerten kann. Du als ganz offensichtlicher Theoretiker musst aber krampfhaft eine Wissenschaft draus machen. Da mach´ ich ab jetzt nicht mehr mit, zumal du eh nur auf Streit aus bist. Was ich aber noch machen werde: den Thread alle Jubeljahre mal aus der Versenkung holen. Um mich nach dem Stand der Dinge zu erkundigen, und dir so dein Scheitern immer wieder vor Augen zu führen. Denn genau darauf läuft es hinaus, ich hatte ja schon gesagt, warum. Nur glaubst du ja auch das nicht, denn du bist/warst doch der große Entwickler vor dem Herrn...
Uwe S. schrieb: > Mark K. schrieb: >> daher möchte ich >> mal fragen. wie man bei einer im subj. genannten Regelung die >> Gegen-EMK-Spannung am besten mißt - zu welchem Zeitpunkt, über welche >> Zeit oder wie. > > Genau das habe ich beantwortet. Bei hochfrequenten Pulspaketen misst man > zum Ende der Pause. Bei einfachen Steuerungen, bei denen die Pause Teil > der Pulsweite ist, misst man nach Entladen der Motorinduktivität die > gesamte Pause über. ...und ein Beispiel aus der Praxis, wie das jemand für Modellbahnmotoren schon umgesetzt hatte (mit Kommentaren im Code, die erklären, warum gerade so), hatte ich weiter oben auch verlinkt: Beitrag "DCC Decoder Lastgeregelt asm" Nur, weil das inzwischen wieder untergegangen ist. MfG, Arno
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.