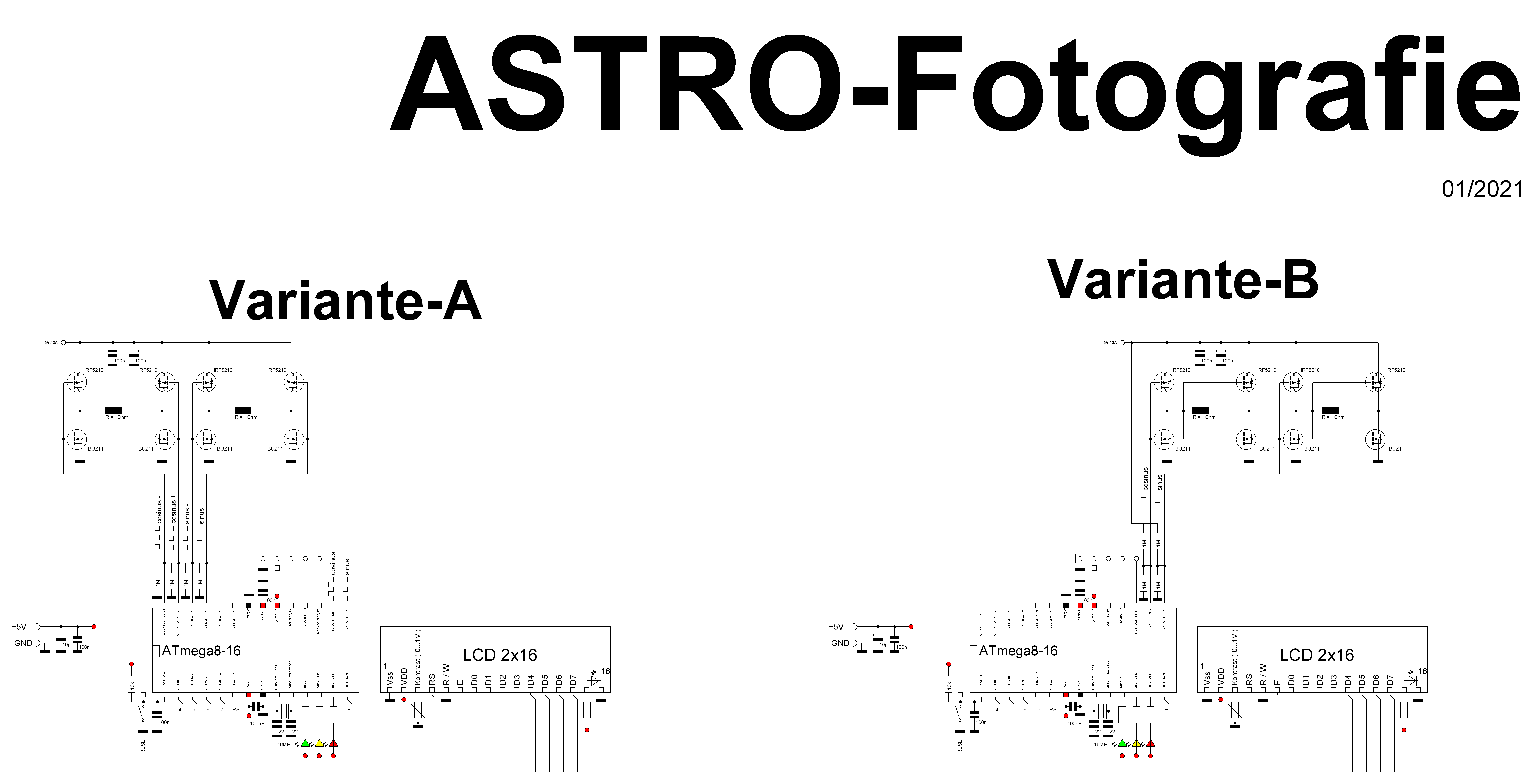

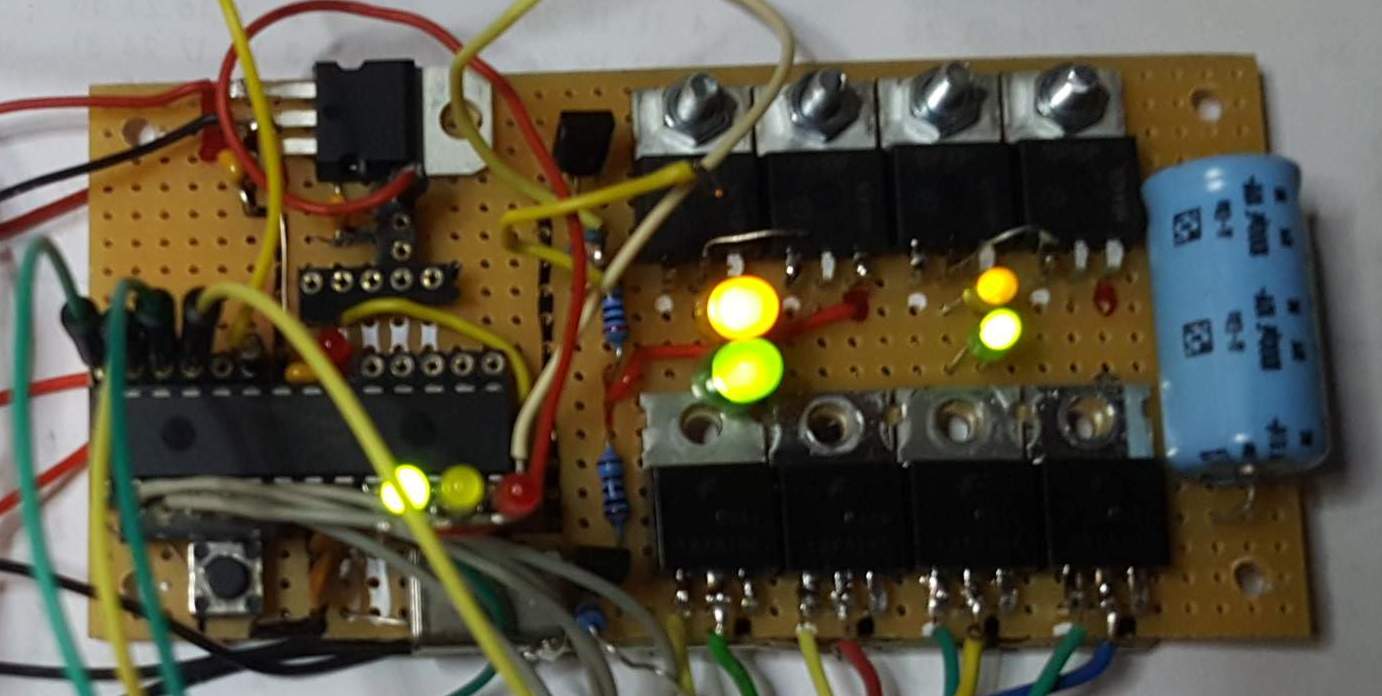
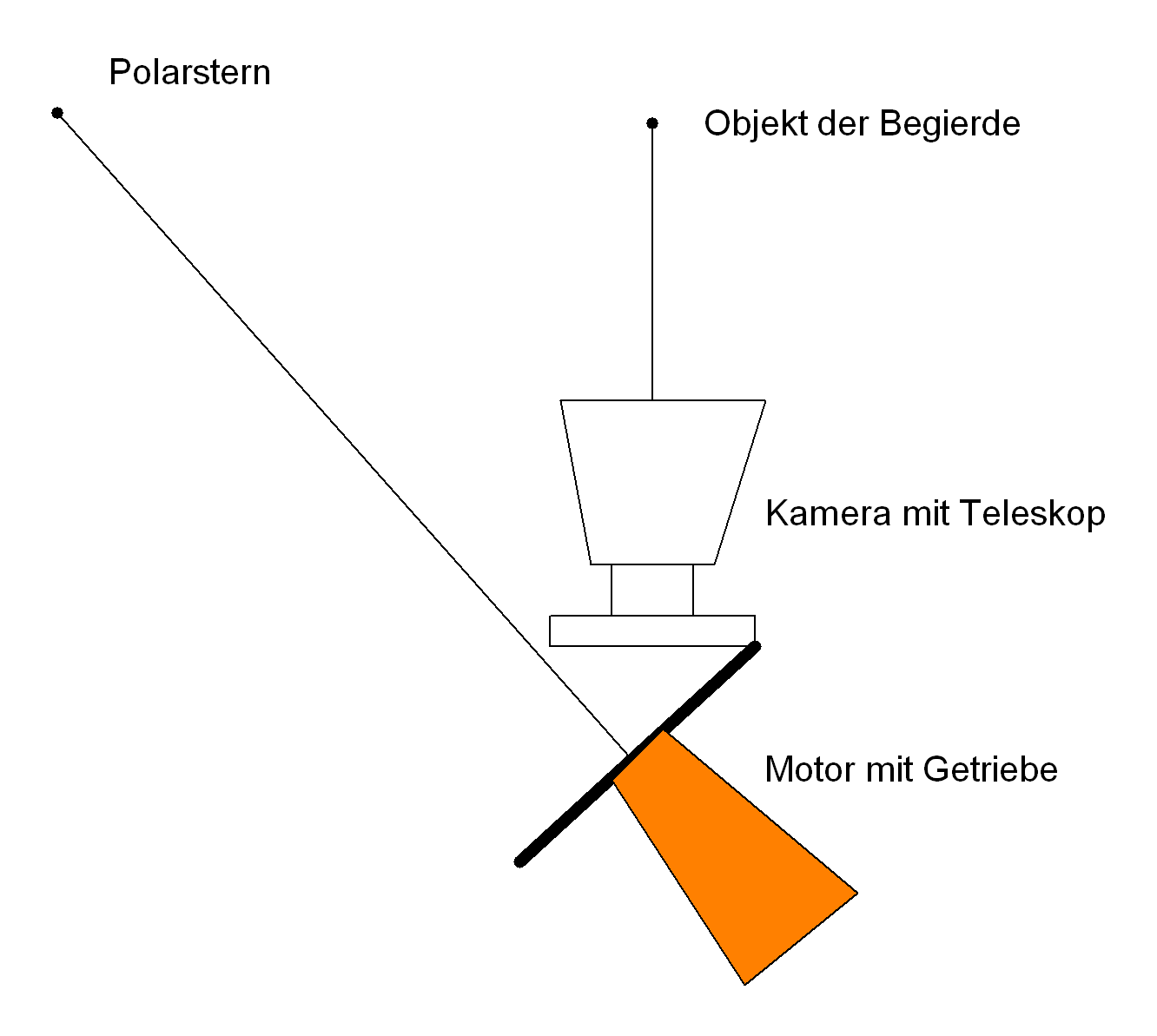


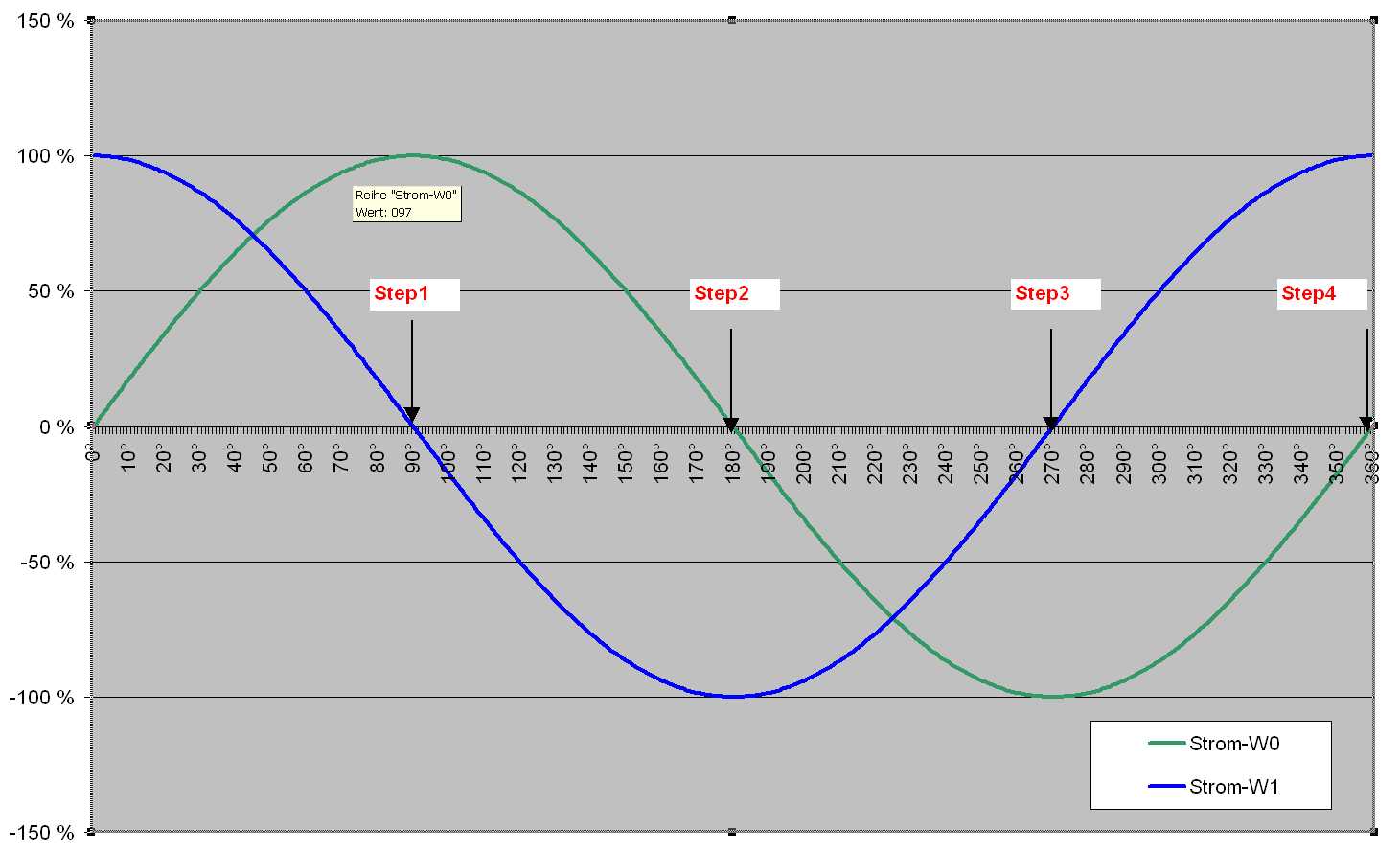
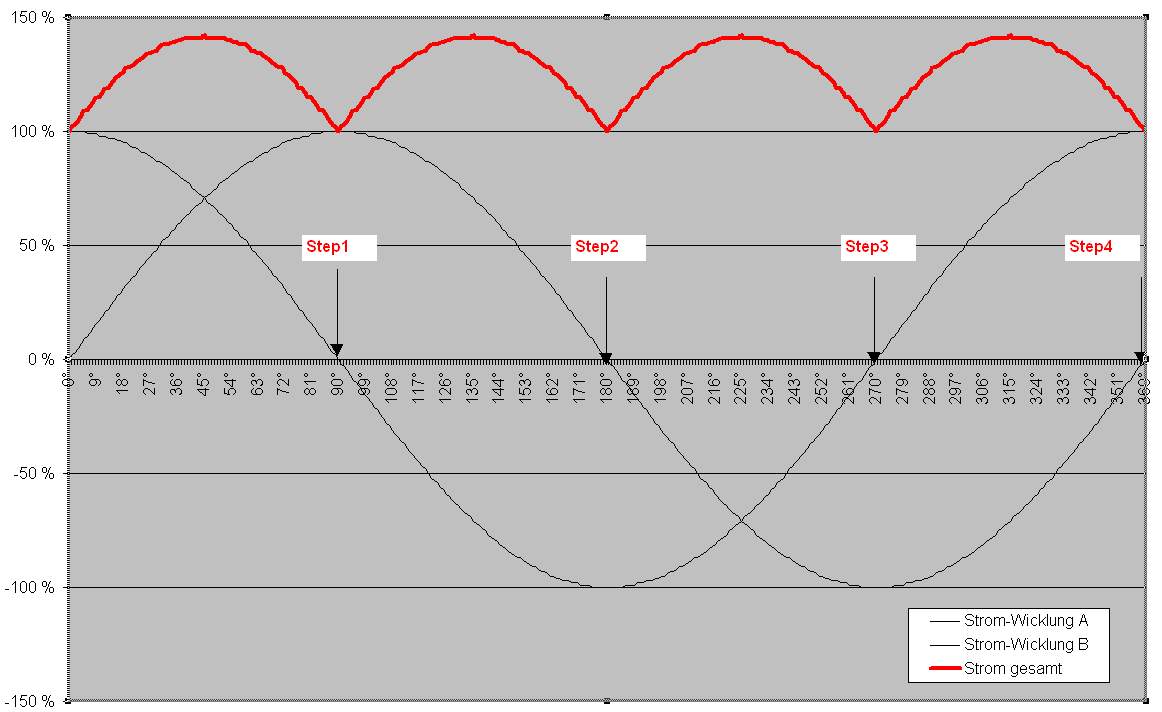
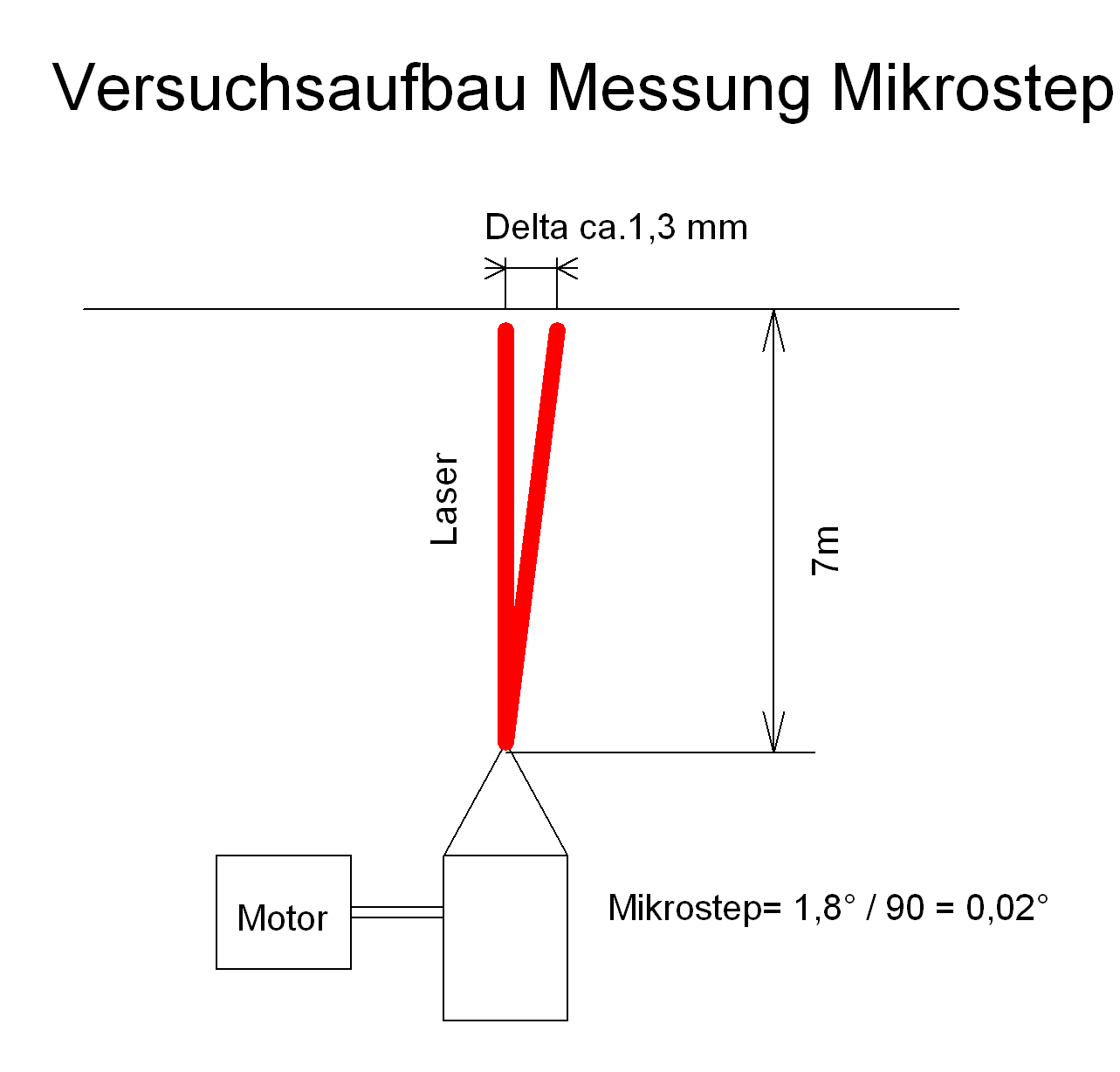

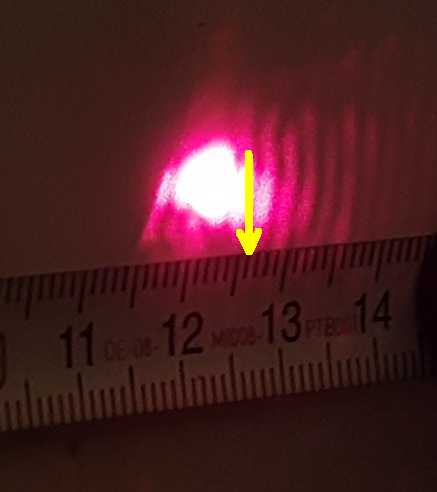



Ein kleines Low Cost Beispiel (Version-1) eines Astro Nachführsystems mit einem µC. Die einfache Schaltung mit 4xFET kann nach belieben verändert und/oder durch Schrittmotortreiber ersetzt werden. Hier sind wertvolle Tipps zu finden: Beitrag "Schrittmotor Stepper Endstufe Treiber Steuerung Schaltung Varianten Ideen Diskussion" Prinzip: Die Drehachse des Getriebes zeigt in Richtung Polarstern. Bitte beachten, er steht aber nicht exakt im Norden. Die Kamera mit Teleskop bzw. Objektiv zeigt in die Richtung der Begierde, z.B. auf den Saturn. Der Schrittmotor und das Getriebe, im Beispiel ein Übersetzungsverhältnis von 7:1, dreht den Apperat in 24h um die eigene Achse, um die sogenannten Sternenspuren auszugleichen. Der Schrittmotor ist aber das Problem, er muss sich kraft-, gefühlvoll und überzeugend drehen, mit akzeptablen Steps. Das Assemblerbrogramm mit seiner 16Bit PWM und ein 1,8° Motor schafft es auf 36.000 Stepps pro Motorumdrehung. Eine Drehbewegung ist nicht mehr spürbar, erst eine Lasermessung auf mehrer Meter Distance bringt die Sonne an den Tag. Pro Vollschritt des Motors stehen 180 Mikrosteps zur Verfügung, das sind 0,01 Grad Motordrehung bei einem 1,8 Grad Stepper. Kurz nach Programmstart wird der Motor langsam bestromt, ca.1s, da knallt und ruckelt nichts, er begibt sich in eine undefinierbare Startposition. Anschließend optimiert das Programm unmerklich die sanften Mikrosteps, kann mehrere Minuten dauern, die gelbe LED blitzt dabei kurz auf. Mit den Tasten am AVR öffnet sich ein kleines selbsterklärendes Menu, hier kann z.B. das Zeitintervall eines Stepps in ms eingestellt werden, ist z.B. abhängig von der Getriebeübersetzung. Hinweis: nach 24h gibt es leider ein paar Sekunden Nachführungenauigkeit, ich versuche diesen Effekt noch abzustellen, ist nicht ganz einfach. Im Hauptmenue wird u.a. auch die Betriebsspannung angezeigt. Die Menues schließen sich nach wenigen Sekunden von alleine, wenn keine Taste mehr betätigt wird und der µC führt vorsichtshalber einen Reset durch. Für Hinweise und konstruktive Kritik bin ich sehr dankbar. Bernhard Nachtrag: Das Bild vom Saturn ist nicht mit einem Ackerschnacker (Smartphone) aufgenommen :-) Preiswerter Stepper mit Getriebe 5:1 https://www.pollin.de/p/joy-it-schrittmotor-mit-getriebe-5-1-nema17-05gm-1-80-motor-2-phasen-2-8-v-1-68-nm-310803
Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATmega8
Angehängte Dateien:
-

Schaltung.png
160 KB -

Prototyp.jpg
240 KB -

Versuchsaufnau.jpg
80 KB -

Aufbau.png
12 KB -

Motor_DPM60SH65.png
2,1 MB -

Motor_Getriebe.jpg
210 KB -

Motor_Mechanik.jpg
180 KB -

Motor_Drehfeld_STEPs.jpg
71 KB -

Motor_Stromverlauf.jpg
67 KB -

B0.png
15 KB -

B1.jpg
210 KB -

B2.jpg
240 KB -

B3.jpg
68 KB -

B4.jpg
8,1 KB -

so_gefunden.jpg
200 KB -

Display.jpg
69 KB -

Saturn.jpg
26 KB
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Schaltung.spl Mit welcher Software lässt sich diese Datei lesen?
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
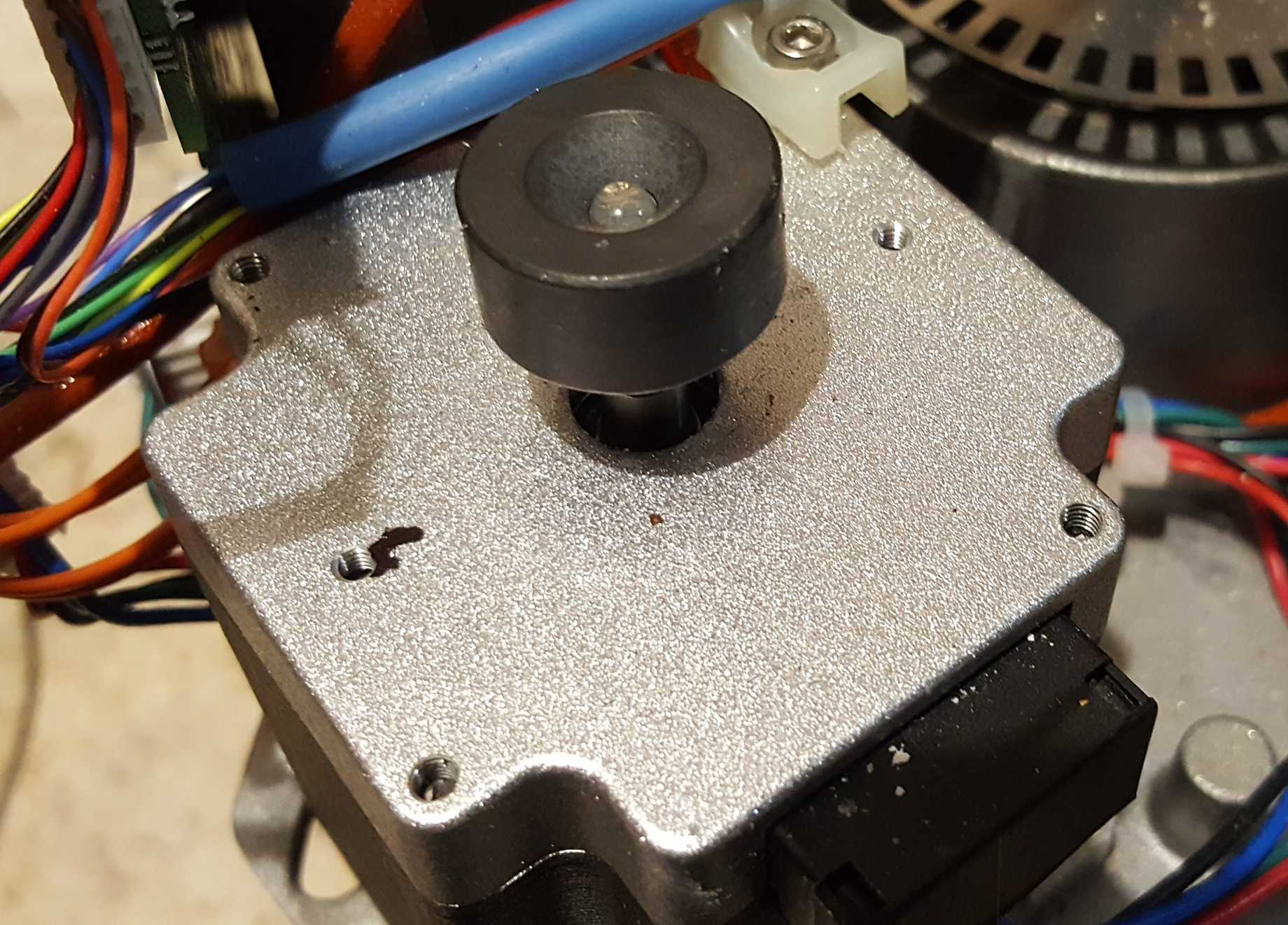
Hallo Bernhard, das Projekt finde ich als a) µC-Bastler und b) Stern-(Foto)-Freund hochinteressant und spannend. Das Schaltbild zeigt aber nur, dass der Mega8: 1) Mit Quarzfrequenz getaktet wird, 2) den Stepper ansteuert, 3) ein 2 x 16 Display und LEDs nach Ampel-Art ansteuert und 4) ein Pin-Header (o.ä.) für Tasten zuständig zu sein scheint. Dann hast du noch mechanisch eine (steuerbare?) Kameramontierung <so_gefunden>. Erzähl doch bitte etwas mehr über die Zusammenhänge für die Gestaltung der Ansteuerung und das Benutzer-Interface. Grundsätzlich muss so eine Nachführung doch nur genau die Erddrehung kompensieren: * 1 Umdrehung in ~= 86164 s. Evtl. noch Abwandlungen für die * Mond-, oder Sonnen"geschwindigkeit", oder für die * Südhalbkugel. Und * Schnelllauf. Was bewirken die Tasten und was zeigt das Display?
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Angehängte Dateien:
-

Display_Edit.jpg
27 KB -

A.jpg
160 KB -

B.jpg
330 KB -

C.jpg
110 KB



Jacko schrieb: > Was bewirken die Tasten und was zeigt das Display? Mit den Tasten kannst Du u.a. das Intervall der Mikrostepps in Millisekunden festlegen und somit die Schaltung an jeden Stepper und an jedes Getriebeverhältnis Sonne/Mond anpassen. Leider stehen nicht genügend Kommastellen zur Verfügung, daher die kleine Gangungenaugkeit, evenuell könnte man den Quarz etwas "ziehen", um die Gangungenauigkeit auszugleichen Bsp: 360°/24h, 1,8 Grad Vollstepwinkel, 180 Mikrosteps pro Grad Getriebe 7:1 ergibt eine Intervallzeit von 342,8 ms pro Mikrostep s. Excel-Tabelle. Im Hauptmenue steht die Zeit seit Programmstart und die aktuelle Position des Getriebes bzw. der Kamera in Grad und der Absolutwert der Mikrosteps, so als Kontrolle . Bei korrekter Programmierung dreht sich die Kamera nach einer Stunde um 15°, bzw. nach 24h um 360°. Und Anzeige der Betriebsspannung, könnte bei Akkubetrieb hilfreich sein. Ein Schnelllauf ist momentan noch nicht vorgesehen, man kann die Betriebsspannung abschalten, dann verliert der Stepper sein Haltemoment. W.A. schrieb: > Mit welcher Software lässt sich diese Datei lesen? sPlan4.0 Momentan experimentiere ich mit einemm Türmotor/Kabinentürmotor eines Aufzuges (Fahrschtuhl), optisch sieht der Motor und das Schneckengetriebe vernünftig aus, aber es ist ein Gleichstrommotor. Trotz Schlitzscheibe und optischer Sensoren lässt er sich nicht feinfühlig genug positionieren, aber ein extrem super flotter Schnelllauf ist garantiert^^ Ein kleiner Stepper soll angeflanscht werden, hab aber dafür noch keine Lösung :(
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Nachführungenauigkeit, ich versuche diesen Effekt noch abzustellen, ist > nicht ganz einfach. Nehm doch einfach den Zeitunterschied von DCF77 oder über eine RTC.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
100Ω W. schrieb: > Nehm doch einfach den Zeitunterschied von DCF77 oder über eine RTC. Das Problem liegt woanders, exakt müsste man 342,85714286 ms einstellen, möglich ist aber nur 342,8 ms, es fehlen Kommastellen, somit dreht sich die Cam entweder etwas zu schnell, oder etwas zu langsam, liegt pro Tag im Winkelsekundenbereich. Auffällig wird der Fehler nach 24h, dann steht der Mechanismus nicht exakt auf 360°, sondern auf 359,9x°. Ganz ehrlich, Hobby-Astronomen werden Verschluss- bzw. Belichtungszeiten nur im Minutenbereich wählen. Beispiel eines Stepper-Testers, einfach und unkompliziert: Beitrag "Schrittmotor Stepper Hybridschrittmotor Tester selber bauen Eigenbau ATmega8 Assembler"
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Verstehe: Das Display dient mehr als Interface für die Anpassung des Ansteuerungstakts an die vorgefundene Motor- und Getriebe- kombination. Ich hatte mir schon für einiges Geld eine Astronachführung gekauft. Dort sind µC, Motor und Getriebe fest vorgegeben. Interessanterweise machen die das mit einem DC-Motor, der mit einem optisch gewonnenen Tachosignal vom µC über einen TB6612 (höchstwahrscheinlich) per PWM geregelt wird. Für die Handhabung: Grundsätzlich ist bei käuflichen Geräten der Start-Drehwinkel so, wie vorgefunden. Mit schnellem Vor-/Rücklauf kann es in die gewünschte Position gebracht werden. Das braucht man aber fast nie, weil die Kamera doch mit der Stativkopf-Verstellung ausrichtet wird. Darum habe ich noch nicht verstanden, weshalb du so einen großen Aufwand für den Anlauf und die Position betreibst. Wenn es beim Einschalten kurz (max. wenige Sekunden) ruckelt, ist das doch egal - erst wenn die Nachführung stabil läuft und die Kamera ausgerichtet ist, wird ausgelöst. DCF o.ä. sind Quatsch - Quarzgenauigkeit ist für die Nachführung voll ausreichend. Mit einer günstigen Selbstbaumontierung wird man keine Belichtungszeiten über 15 Minuten anpeilen. (Auch die käuflichen Kamera-Nachführungen versprechen nicht mehr.) Kleiner Hinweis: Für die Stern-Nachführung muss das Gerät nach 24 Stunden aber eher 361°, als 359,9° gedreht haben!
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Schönes Projekt. :-)
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Hallo Bernhard, vielleicht ist es ein Weg, die Reaktionszeit fest durch einen Teiler ohne Rundung zu setzen und die Position jeweils neu zu berechnen. Dann hast Du zwar eine Positionsabweichung von max. 1 Mikrostepp, aber mit den Zeiten bist Du sehr flexibel. Wenn Du dann nach dem Einschalten einen Nullpunkt hast, kannst Du deine Position schnell erreichen. Ähnlich habe ich das mit meinem XY-Tisch gemacht. Da entstehen auch sehr krumme Rechenwerte, aber keine addierten Fehler. Gruß Carsten
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Das Problem liegt woanders, exakt müsste man > 342,85714286 ms einstellen, möglich ist aber > nur 342,8 ms, es fehlen Kommastellen, Dann stelle abwechselnd für jeden Schritt 342,8ms bzw. 342,9ms ein, das ergibt im Mittel 342,85ms. Eine Kommastelle gewonnen. Du kannst auch einen Siebenerzyklus verwenden und das erste, dritte, fünfte und siebente Intervall 342,9ms lang machen, das zweite, vierte und sechste dagegen nur 342,8ms, dann stimmte es im Mittel exakt.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Egon D. schrieb: > exakt müsste man >> 342,85714286 ms einstellen Sorry, aber das ist leider völlig daneben. Und wenn Du noch so genau die Erddrehung kompensierst, wird Dir der Stern immer auswandern, wenn Du die Lichtbrechung in der Atmosphäre nicht berücksichtigst.
Super!!! Das baue ich mir nach !
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Hallo Bernhard, sieh es doch mal anders: Du brauchst alle 342,85714286 ms einen Impuls für Deinen Motor. Das ist nicht ganz einfach eizustellen. Wenn Du jetzt alle 100 ms eine Interrupt erzeugen würdest und eine 3 Byte lange Konstante zu einem 4Byte Wort addieren würdest, ist das 4.Byte Dein jeweiliger Motor-Schrittwert. 342,85714286ms * 100 / 16777216 (2 hoch 24) = 4893354,6666258887111114509274074 Also rund 4893355 = 0x4AAAAB So bekommst Du alle 100ms folgende Werte: Byte1 …Byte3 Byte4 ist für den Motor (PWM) ab aa a4 und 00 für die Motorposition 56 55 95 00 01 00 e0 01 57 55 75 01 02 00 c0 02 usw. Das sollte eigentlich so laufen. Die 100 ms kannst Du natürlich beliebig ändern und die Werte anpassen. Die PWM-Werte würden in Adresse: data 0x0063 stehen und alle 100ms aktualisiert werden. Gruß Carsten
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Sorry, muss jetzt hier mal etwas REALITÄT einbringen: Klar kann man viel Aufwand treiben, um den Zeittakt zu optimieren. Das sollte sich aber auch im Sternfoto zeigen: Je nach Brennweite (10...600 mm) hat man bei aktuellen Kameras z.B. 60" ... 1" pro Pixel. Der mittlere Sonnentag ist 24 h = 86400 s lang. Bei der Sonnenverfolgung gibt es einen Fehler von 342,857.. / 342,8 = 1,000167. Das macht pro Minute 900,15" statt 900,0". Das verschmiert die Sonnenflecken erst nach 4 ... 240 Minuten. Bei Sonnenhelligkeit interessiert das aber NIEMANDEN. Ein Sterntag, die Zeit in der ein Stern wieder an der gleichen Stelle am Himmel zu sehen ist (360°), beträgt 23:56:04 = 86.164 s. Damit kommt man, wenn deine restliche Berechnung stimmt, auf einen Micro-Step alle 86.164 / 252.000 x 1000 ms = 341,921 ms Mit dem 342,8 ms-Step ist die Drehung 1,00257 mal zu langsam, der Fehler ist 2,3" pro Minute. Das fällt nach 13 Sekunden bis 13 Minuten (600 mm ... 10 mm) auf. Stellst du 341,9 ms ein, bist du um das 1,0000614-fache zu schnell. Das ergibt pro Minute einen Sternenstrich von 0,055". Das fiele auch bei 600 mm Brennweite erst nach > 15 Minuten auf. Das alles setzt eine gute Ausrichtung zum Himmelspol voraus. Bildfehler, die eindeutig nur auf Lichtbrechung in der Atmosphäre zurückzuführen sind, würden schon mal zeigen, dass die Nachführung in RA gut funktioniert! :-)
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Carsten-Peter C. schrieb: > Wenn Du jetzt alle 100 ms eine Interrupt erzeugen > würdest und eine 3 Byte lange Konstante zu einem > 4Byte Wort addieren würdest, ist das 4.Byte Dein > jeweiliger Motor-Schrittwert. DDS-Prinzip. Hat was für sich. Liefert im Idealfall eine ähnliche Schrittfolge wie von mir oben angegeben, ist aber viel leichter anpassbar.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Tolle Tricks mit einer Wirkung 20...40 dB unterm "Grundrauschen"! ... ist das so schwer zu begreifen? Gute Nacht!
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Jacko schrieb: > Tolle Tricks mit einer Wirkung 20...40 dB > unterm "Grundrauschen"! > ... ist das so schwer zu begreifen? Eventuell mal an die eigene Nase fassen?! Wenn eine nahezu exakte Lösung genauso (un)aufwendig ist wie eine mehr oder weniger schlechte Näherung, dann ist es nicht sinnvoll, eine schlechte Näherung zu verwenden -- man spart dadurch nix ein.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Das Problem liegt woanders, exakt müsste man 342,85714286 ms einstellen, > möglich ist aber nur 342,8 ms, es fehlen Kommastellen, somit dreht sich > die Cam entweder etwas zu schnell, oder etwas zu langsam, liegt pro Tag > im Winkelsekundenbereich. Dafür gibt es Festkommaarithmetik. Siehe auch https://www.mikrocontroller.net/articles/AVR_-_Die_genaue_Sekunde_/_RTC
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Egon D schrieb:
> Eventuell mal an die eigene Nase fassen?!
Oweh, gleich beleidigt, nur weil ich (mit nachvollziehbaren
Rechenbeispielen) nachgewiesen habe, dass eine exakter eingestellte
Drehfrequenz das Ergebnis (auf dem Sternfoto) nicht verbessern wird.
Ohne systematischen Fehler reicht hier die Auflösung von 10tel
Millisekunden.
Tut mir leid, wollte niemanden kränken! Aber die Tatsachen sprechen
für sich.
Oder kannst du in meiner Rechnung grobe Fehler erkennen? Ich behaupte
ja nicht, unfehlbar zu sein.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
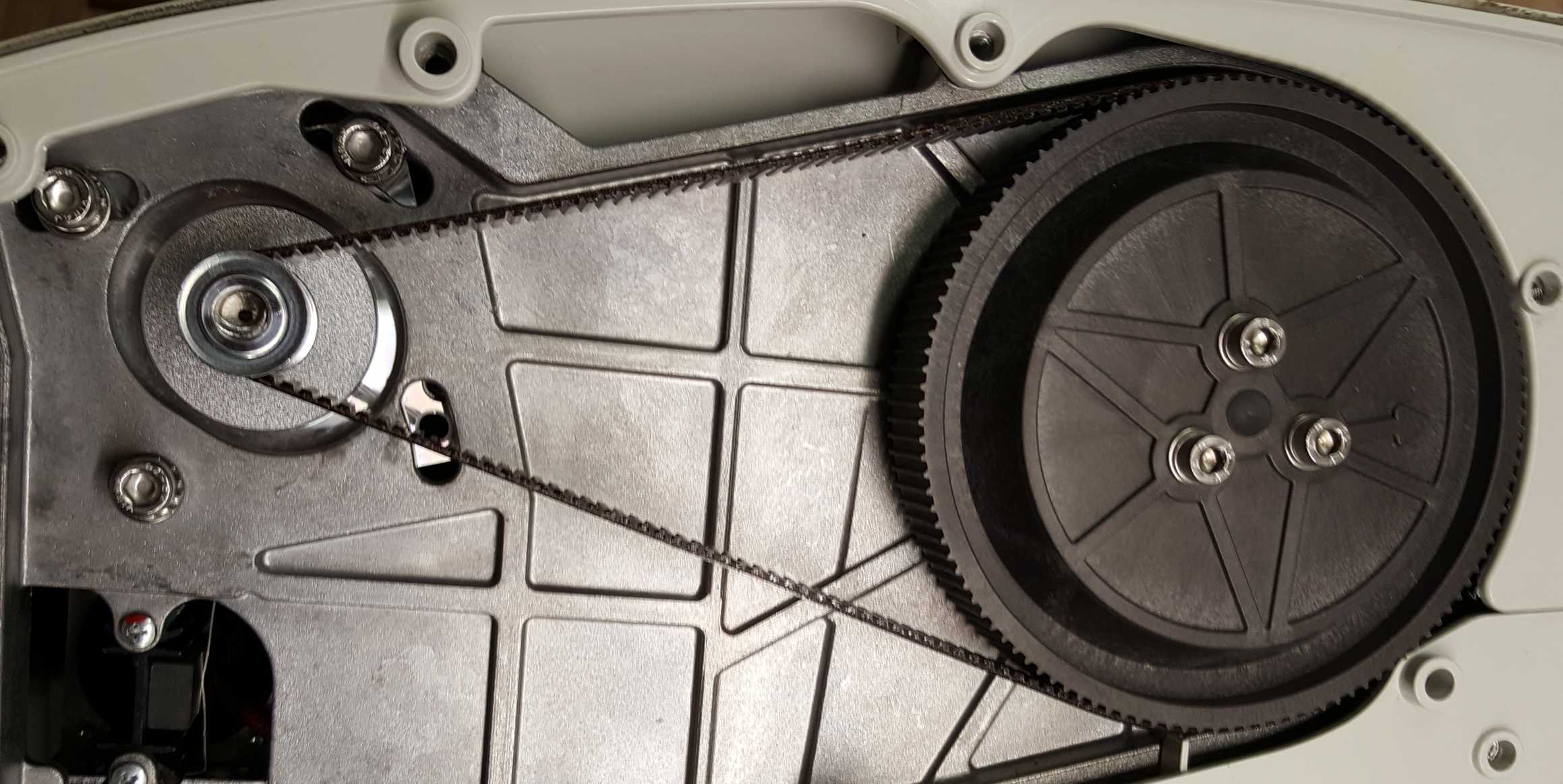
Wir machten das vor zwanzig Jahren für einen Ausflug nach Griechenland für eine damalige große Sonnenfinsternis. Mein Freund baute den Teleskopantrieb mit einem 0.9 Grad Epson Schrittmotor aus einen ausgeschlachteten Tintendrucker und einer vielstufigen Zahnriemenuntersetzung. Er behauptete, dass das ruhiger laufen würde anstatt eines Schneckenantriebs. Kann mich allerdings nicht mehr an diese mechanische Details in Bezug auf Totaluntersetzung erinnern weil ich nur für die Elektronik und FW verantwortlich war und es schon so lange her ist. Mikrostepping verwendete ich nicht. Die Motorsteuerung übernahm ein PIC, in C programmiert. Damit konnte man den Motor mit einer umgebauten IR-Sonyfernsteuerung (RS232) mittels Timer/Komparator vom PIC sehr fein auf siderale Zeit einstellen. Mit der Fernsteuerung konnte man das ganze Teleskop bedienen und im Slewbetrieb genau positionieren. Jedenfalls funktionierte die Anlage in Griechenland absolut genau und es hat keine Wanderungen des Blickfelds gegeben wie seine zurückgebrachten Bilder eindeutig bewiesen. War definitiv ein tolles Projekt.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Schade, vom TO kommt nichts mehr. Zu viel Festkommaarithmetik, oder zu viel "realistische Abschätzung"?
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm



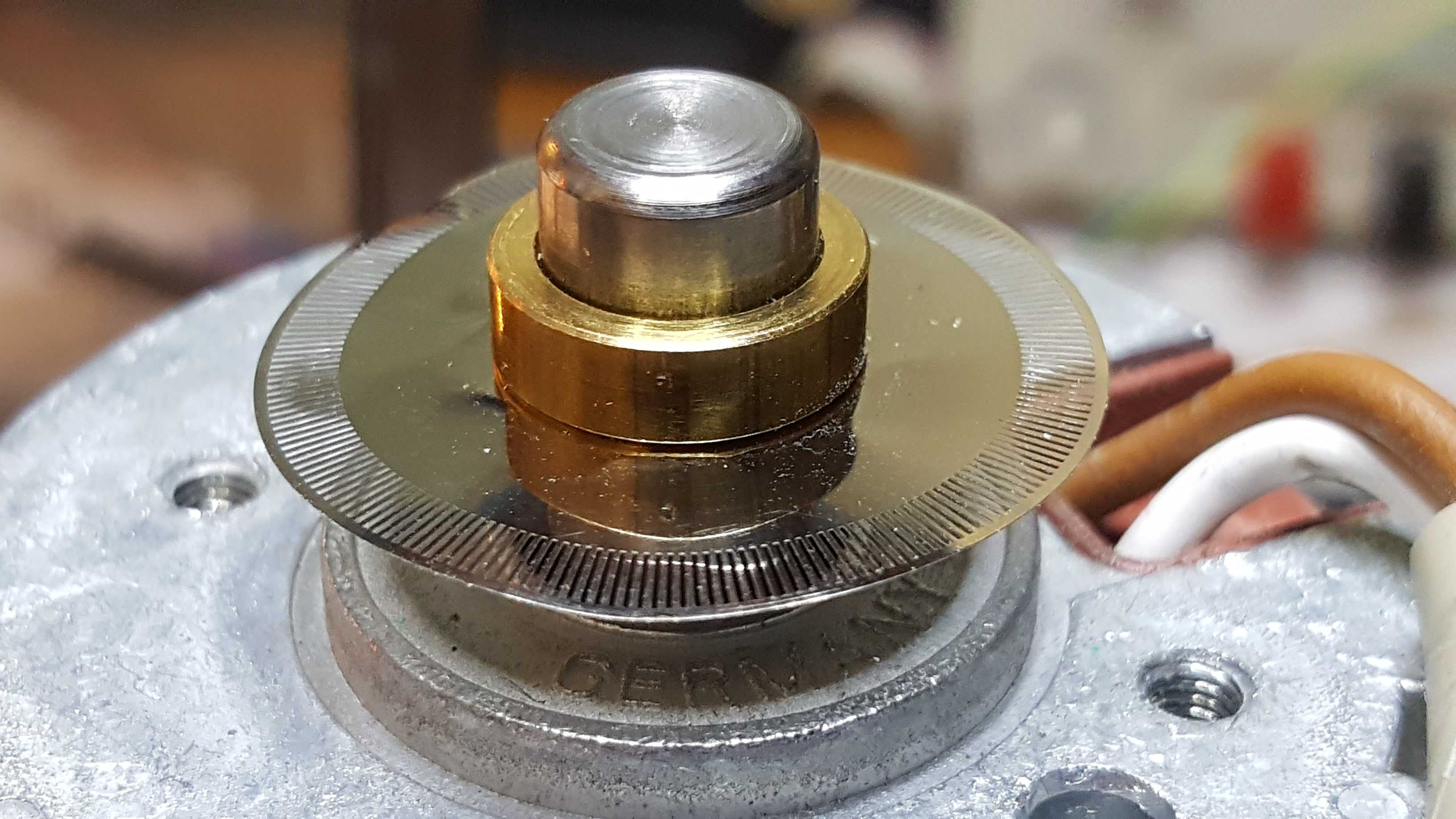
Die Mechanik ist auch eine Herausforderung^^ Das nicht ganz preiswerte Stativ wurde komplett demontiert und mit Tränen in den Augen angebohrt, um den Motor anzuflanschen. Ein kleiner Stepper mit Getriebe 5:1 muss nun diese Konstruktion ruckelfrei drehen. Momentan wiegt diese Anordnung 2,6kg, mit geplanter 1000er "Russentonne" werden ca. 5kg erwartet, mit Schräglage, Blick der Achse Richtung Polarstern, auf dem Norpol hätten wir keine Schräglage :-) ,damit ist die Achslast auf die Getriebewelle und auf die beiden Lage des Steppers schon ganz ordentlich. Ob die Haft- und Gleiteibung noch annehmbar überwunden wird, muss erst Durch eine Lasermessung ermittelt werden. @alle Dankeschön für die vielen Tipps und Anregungen. Um die Genauigkeit kümmere ich mich später. Die Software soll noch auf ein kleines TWI/i2C OLED abgeändert werden: Beitrag "DEBO OLED2 0.96 0,96" OLED-Display SSD1306 SSD1312 Initialisierung TWI I2C AVR ATmeg8 Assembler ASM" Bernhard
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm



Es kostet manchmal sehr viel Überzeugungsarbeit die heilige Küchenwaage für technische Experimente nutzen zu dürfen. Knapp 4,3kg wiegt die gesamte Konstruktion mit der "Russentonne". Diese Last belastet die 8mm Motorwelle....
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Diese Last belastet die 8mm Motorwelle.... Wenn die nicht gerade aus Zuckerguß ist, ist das kein Thema. 8mm Stahl halten GANZ andere Dinge aus!
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Ein kleiner Stepper mit Getriebe 5:1 muss nun diese Konstruktion > ruckelfrei drehen. Warum nur 5:1? ich hätte eher 100 oder 500:1 genommen, damit hat man DEUTLICH weniger Stress und viel mehr Feingefühl, sprich Auflösung bei der Drehung! Denn auch im Mikroschrittbetrieb ist so eine Schrittmotor nicht unendlich auflösend, wenn gleich du das anscheinend mit deinen 36k Schritten/U hingekriegt hast.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Falk B. schrieb: > Wenn die nicht gerade aus Zuckerguß ist, ist das kein Thema. 8mm Stahl > halten GANZ andere Dinge aus! Das dachten sich die Konstrukteure der RMS Titanic auch^^ > Warum nur 5:1? ich hätte eher 100 oder 500:1 genommen. Bei Pollin fand ich nur 5:1. Kennt jemand von Euch noch weitere Bezugsquellen?
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Wieso macht ihr kein Gegengewicht dran? Macht zwar mehr Gesamtgewicht, entlastet aber die Achse und den Motor. Ich habe mal an meinem Stativ, wo ich meine DSLR mit Teleobjektiv drauf hatte, hinten ein Gegengewicht drauf gemacht, erleichtert echt das drehen und schwenken.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Hallo Bernhard, ich habe mal mit 5-Phasen Schrittmotore gebastelt. Hab ich dann aber doch beiseite gelegt, weil andere 2-Pasen Motore mechanisch besser passten und es dafür fertige und günstige Treiber gab. Ich finde Deine Idee, den Motor mit dem PWM vom Atmega zu steuern, für den 5-Phasen Motor sehr interessant. Vielleicht ist so ein Motor auch für Dein Projekt interessant. Da kannst Du deutlich kleinere Schritte ohne Getriebe uns somit ohne Schlupf einstellen. https://www-user.tu-chemnitz.de/~heha/enas/Mark%20II/5-Phasen-Schrittmotor.pdf Weiterhin viel Erfolg Gruß Carsten
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Angehängte Dateien:
-

OLED.jpg
190 KB
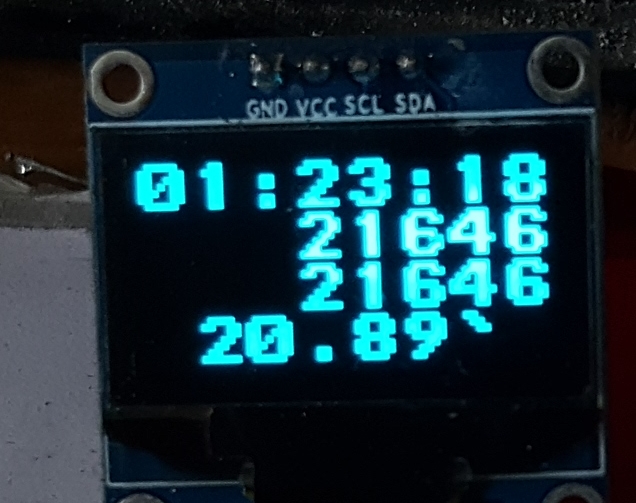
Carsten-Peter C. schrieb: > Wenn Du jetzt alle 100 ms eine Interrupt erzeugen würdest und eine 3 > Byte lange Konstante zu einem 4Byte Wort addieren würdest, ist das > 4.Byte Dein jeweiliger Motor-Schrittwert. Eine sehr elegante Lösung. Super! Mit meinem neuen 5.18:1 Motor werden 372.960 Mikrosteps pro 360° Gertriebewelle benötigt, hab die PWM etwas aufgebohrt, 360 Mikrosteps pro Step. Ein 100ms Timer addiert zu einer 32Bit "Zeitzahl" eine Konstante 221, anschließend wird die "Zeitzahl" durch 256 dividiert (ist in Assembler sehr einfach und flott). Das Ergebnis ist nun die errechnete Absulut-Position, wo sich der Motor befinden müsste. Beispiel: Der 0,1s Timer wird in 24h 864.000 mal aufgerufen. Wenn bei jedem Aufruf die Zeitzahl um 221 erhöht wird ergibt es am Tag eine Zeitzahl von 190.944.000 (864.000 x 221). 190.944.000 durch 512 = 372.937 benötigte Mikrosteps pro Tag: 372.960 Abweichung pro Tag: 23 Mikrosteps (10s) ...Peanuts Zöge man den Quarz des µC noch etwas, ginge die Abweichung gegen Null, bei konstanter Temperatur natürlich^^ Das Display Zeigt die Uhrzeit, Soll- Ist-Position, Winkel der Achsdrehung seit Programmstart. Gerhard O. schrieb: > Er behauptete, dass das ruhiger > laufen würde anstatt eines Schneckenantriebs. Könnte eventuell der Stick-Slip-Effekt sein Unwesen treiben? https://de.wikipedia.org/wiki/Stick-Slip-Effekt Jacko schrieb: > Ohne systematischen Fehler reicht hier die Auflösung von 10tel > Millisekunden. Dem stimme ich zu, alle ca. 300ms muss der 5.18:1 Motor einen Mikrostepp weiter rücken. Notfalls könnte man mit einem 27:1 Getriebe aufrüsten. https://www.amazon.de/gp/product/B077YXYTDD/ref=ox_sc_act_title_4?smid=ABVRCUH7Y5NVN&psc=1 Carsten-Peter C. schrieb: > ich habe mal mit 5-Phasen Schrittmotore gebastelt. Welchen Motor würdest Du dafür empfehlen? Armin K. schrieb: > Wieso macht ihr kein Gegengewicht dran? > Macht zwar mehr Gesamtgewicht, entlastet aber die Achse und den Motor. Ist in Planung. Danke nochmals an alle. PS: Mal ein paar Hardware-Problemchen, könnte eventuell auch interessant sein: Beitrag "Stepper Problem NEMA17-05GM 1036 Stepps statt 1000 Stepps pro Umdrehung" Beitrag "Schrittmotor Stepper Endstufe Treiber Steuerung Schaltung Varianten Ideen Diskussion"
Beitrag #6577407 wurde von einem Moderator gelöscht.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Welchen Motor würdest Du dafür empfehlen? Hallo, ich habe mal Berger Lahr RDM59 6/50 Motore ausgebaut. Wenn man auch nur einen Strang mit 2A belastet, kann mann die Achse kaum noch mit der Hand drehen. Gruß Carsten
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Ein 100ms Timer addiert zu einer 32Bit "Zeitzahl" eine Konstante 221, > anschließend wird die "Zeitzahl" durch 256 dividiert Hallo, ich würde nicht die „Zeitzahl“ berechnen, sondern lieber die Position. Dann läuft Deine Uhr ganz normal weiter und macht meinetwegen alle 1/10 sec. einen Interrupt. Dann zählst Du zu Deinem 32-Bit Positionszähler einen Wert dazu. Der Überlauf von der 3. Zur 4. Stelle ergibt Deinen PWM-Wert. Die Position würde dann nur < 1/10 sec nicht stimmen. Natürlich kannst Du die Zeit auch kleiner wählen. In der Zeitschrift C’T wurde mal beschrieben, wie man bei einem Plotter die Schritte der X- und Y- Motore derzeit in Z80 Assembler berechnet. Leider kann ich den Artikel auf die Schnelle nicht finden. Der Weg ist für Deine Berechnung aber ähnlich. Hier aus meiner Erinnerung der Weg mit den 2 Motoren: DX = Schritte X Motor DY = Schritte Y Motor DX ist> DY ----------- Wert= Wert + DY Wenn Wert> DX, Motor einen Y Schritt weiter , Wert = Wert – DX Motor einen X Schritt weiter, bis Ende erreicht Gruß Carsten
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Carsten-Peter C. schrieb: > In der Zeitschrift C’T wurde mal beschrieben, wie man bei einem Plotter > die Schritte der X- und Y- Motore derzeit in Z80 Assembler berechnet. Nennt sich Bresenham-Algorithmus. https://de.wikipedia.org/wiki/Bresenham-Algorithmus Für den Op reicht der normale DDS-Ansatz, wenn gleich man vielleicht auf einen 40 Bit Akku gehen sollte, um die Frequenzauflösung zu erhöhen.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Der 0,1s Timer wird in 24h 864.000 mal aufgerufen. Blöde ist nur, dass du bei einem Astro Nachführsystem für Nachführung auf Sterne nur 86164,0905 Sekunden pro 360° Umdrehung Zeit hast. Ich fürchte, dass du da noch mal bei musst.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Wolfgang schrieb: > Blöde ist nur, dass du bei einem Astro Nachführsystem für Nachführung > auf Sterne nur 86164,0905 Sekunden pro 360° Umdrehung Zeit hast. > Ich fürchte, dass du da noch mal bei musst. Was bist du nur für ein erbärmlicher Besserwisser!
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Angehängte Dateien:
-

Berechng_Konstante.jpg
410 KB
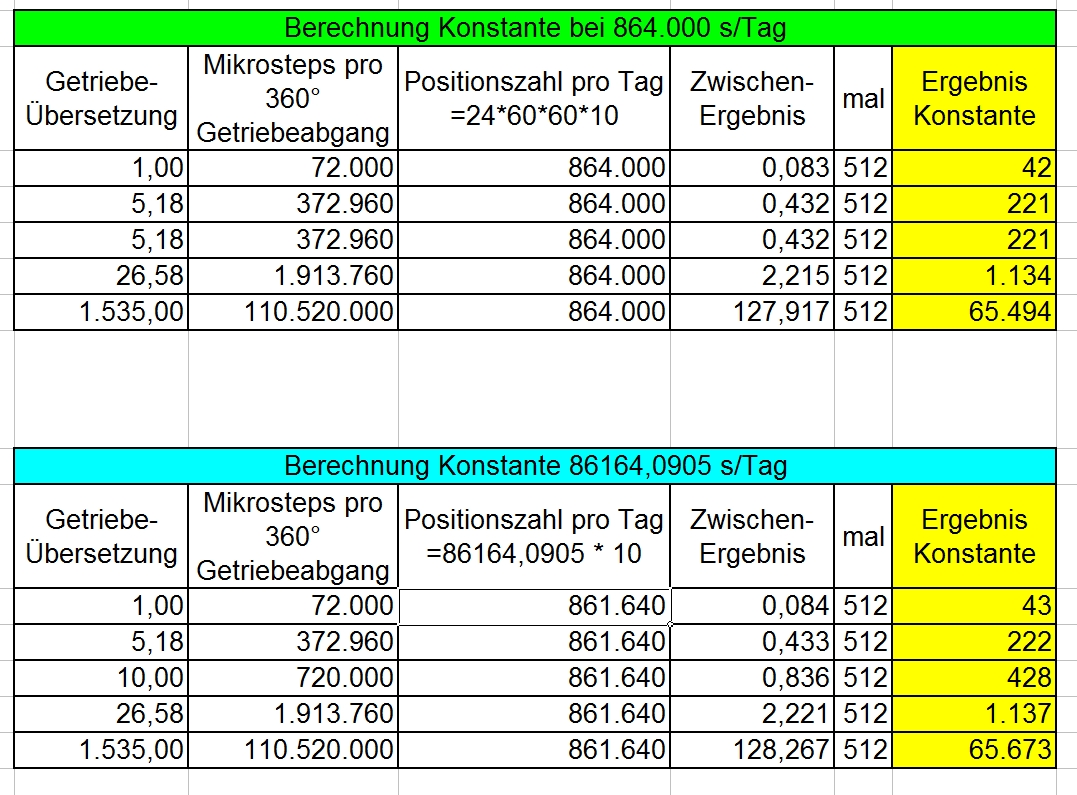
Carsten-Peter C. schrieb: > ich würde nicht die „Zeitzahl“ berechnen, sondern lieber die Position. > Dann läuft Deine Uhr ganz normal weiter und macht meinetwegen alle 1/10 > sec. einen Interrupt. Hallo Carsten, die "Zeitzahl" nenne ich ab sofort, weil heute Sonntag ist, "Positionszahl", da aus dieser später die Soll-Position einfach, mit wenigen kostbaren µC Takten errechnet werden kann. Bei jedem 100ms Interrupt wird zur "Positionszahl" eine Konstante dazuaddiert, 0:00 Uhr ist die "Positionszahl" Null. Alle 100ms erfolgt ein Vergleich zwischen Soll- und Ist-Position und bei Bedarf der Antrieb mit einer Genauigkeit von 100ms nachgeführt. In der Software kann der Benutzer im Menue das Getriebeübersetzungsverhältnis eingegeben, die Konstante wird anschließend automatisch errechnet s.Excel-Tabelle. Übersetzungsverhältnisse von 1:1 bis 1535:1 sind möglich. Falk B. schrieb: >> Blöde ist nur, dass du bei einem Astro Nachführsystem für Nachführung >> auf Sterne nur 86164,0905 Sekunden pro 360° Umdrehung Zeit hast. Falk, danke für den Tipp, hab's mit berücksichtigt.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Angehängte Dateien:
-

Berechng_Konstante.jpg
410 KB
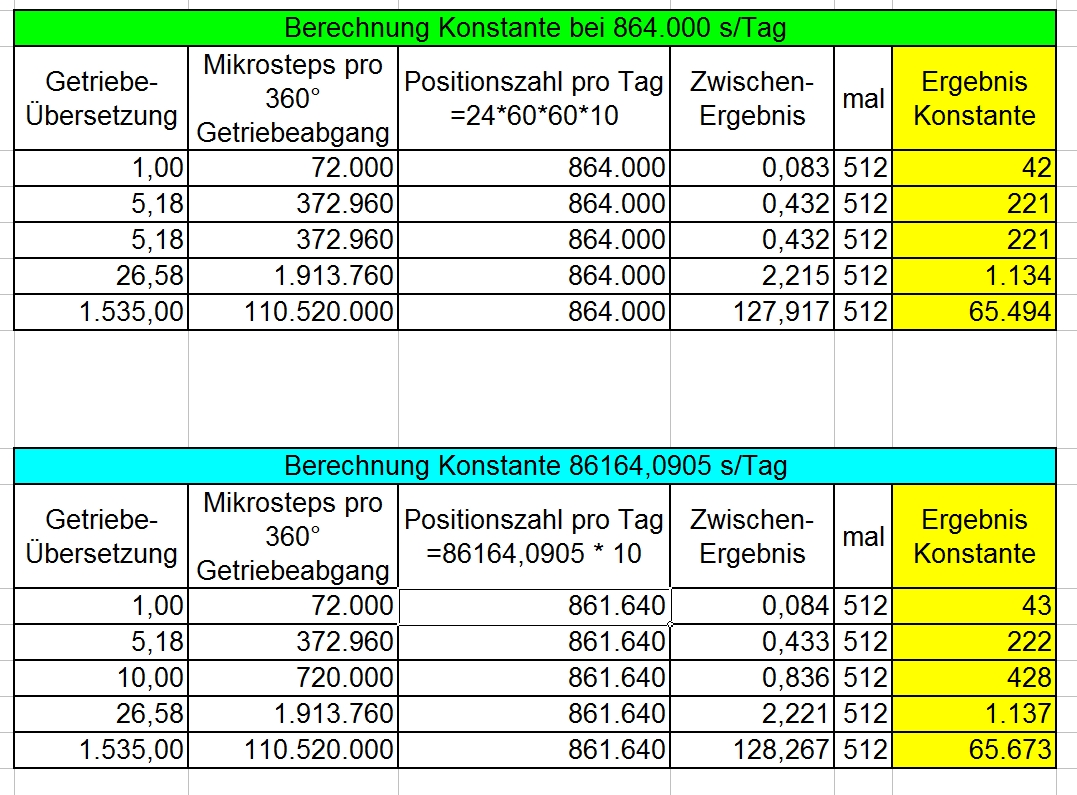
Excel-Tabelle
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Falk B. schrieb: >>> Blöde ist nur, dass du bei einem Astro Nachführsystem für Nachführung >>> auf Sterne nur 86164,0905 Sekunden pro 360° Umdrehung Zeit hast. > > Falk, danke für den Tipp, hab's mit berücksichtigt. Lern mal zu zitieren. Das war der Klugscheißer Wolfgang.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Angehängte Dateien:
-

Schaltung.png
55 KB -

OLED128x64.jpg
89 KB -

Getriebeuebersetzung.jpg
29 KB
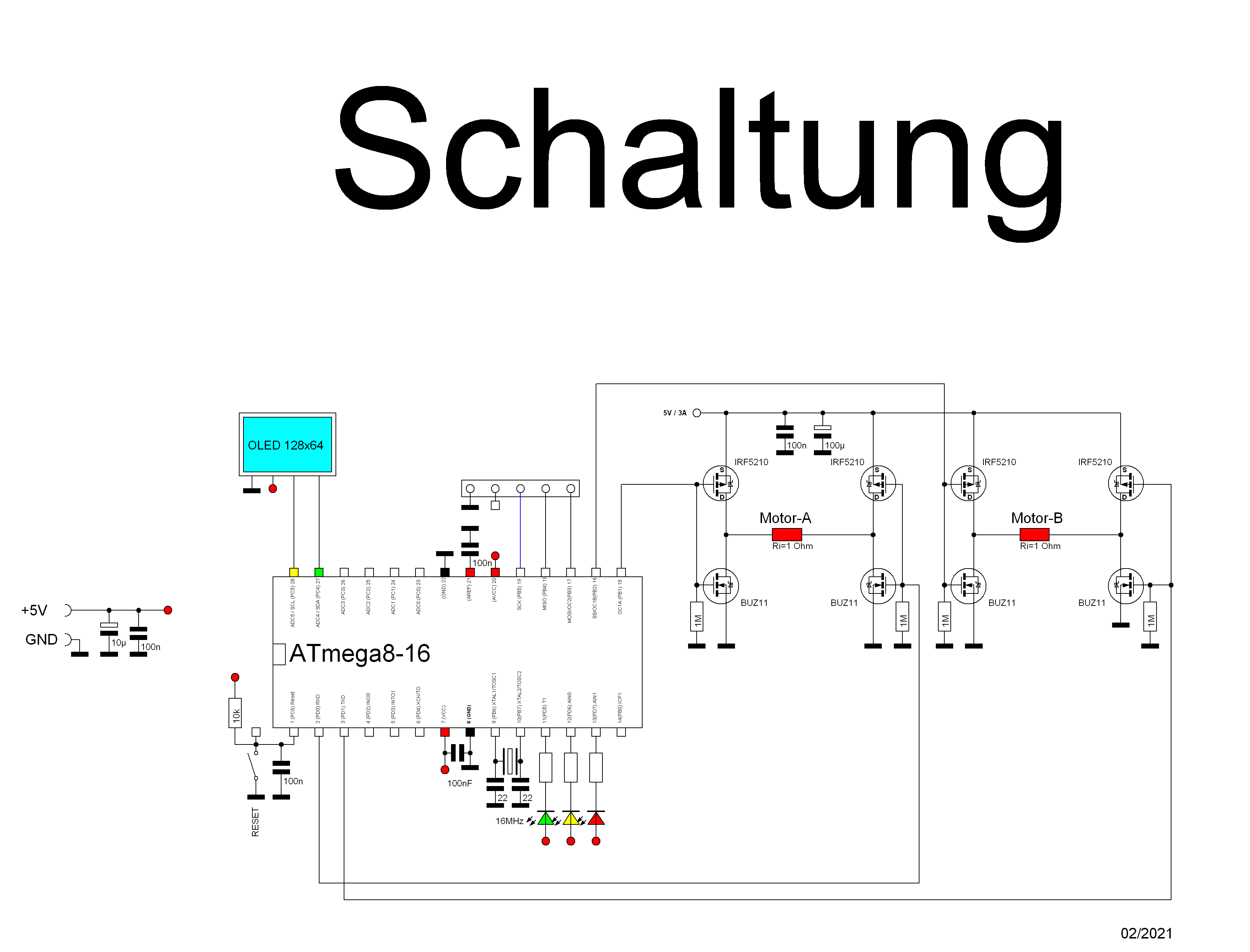
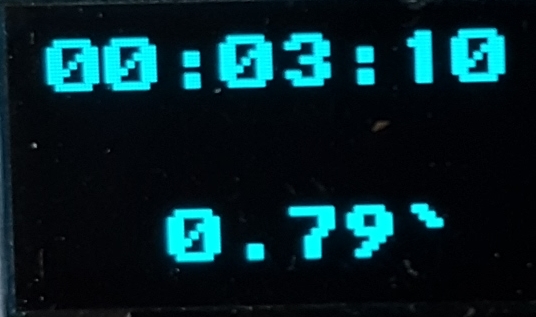
Version-2 Im Assembler-Code lässt sich die Gertriebeübersetzung im Bereich 1:1 bis 100:1 anpassen. Momentan 5.18:1 Das Display zeigt den Drehwinkel der Kamera und die Zeit seit Programmstart an. grüne LED: Sekundentakt gelbe LED: Mikroschritt rote LED: Error Die Schaltung kann auch ohne OLED128x64 betrieben werden. Dabei leuchtet die rote, Sklave (Display) am TWI/I2C Bus nicht gefunden. Die hinterlegte 10Bit große Sinustabelle nimmt sehr viel Platz weg, ca.75%. Liese sich aber verkleinern, man menötigt eigentlich nur den Sinus von 0...90Grad, andere "Sinüsse" z.B. 110 Grad lassen sich daraus ableiten. Der Timer0 (die Phasenumkerhr) verbraucht viele Prozessortakte, wenn möglich bitte "TIMER0_PHASENUNKEHR_INITIALISIERUNG" deaktivieren. Hinweis: die Displaydarstellung benötigt eine Zeit bis ca. 50ms Bernhard PS: Danke Carsten-Peter für Deine wertvollen Tipps
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Hallo, dem Photo auf Beitrag "Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm" entnehme ich, dass Du den Getriebemotor https://www.aliexpress.com/item/33018687874.html selbst hast. Hat der jetzt eine Untersetzung von 5:1 oder von 5,18:1, wie bist Du mit dem Teil zufrieden, hat das Getriebe Spiel? B
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
bingo schrieb: > Hat der > jetzt eine Untersetzung von 5:1 oder von 5,18:1, wie bist Du mit dem > Teil zufrieden, hat das Getriebe Spiel? Ein Getriebespiel ist mit meinen Mitteln nicht nachweisbar. Übersetzungsverhältnis: 5 2/11:1 5,181818181818 : 1 bzw. 1036,36 Schritte pro Umdrehung der Getriebewelle Mit dem Datenblatt gab's Probleme, Reichelt war aber so freundlich und korriegiete die Datenblätter siehe: Beitrag "Stepper Problem NEMA17-05GM 1036 Stepps statt 1000 Stepps pro Umdrehung" Gekauft bei: https://www.reichelt.de/ch/de/schrittmotor-nema-17-1-8-1-68-a-2-8-v-nema17-05gm-p269224.html?search=NEMA17-05GM&&r=1 Mit dem Motor bin ich zufrieden, robust aufgebaut, im Mikrostepbetrieb absolut lautlos, Getriebe lässt sich leicht abflanschen, Motorwelle 8mm mit Abflachung, bei 1 Ampere Motorstrom und 5 W Leistung, kannst Du gefühlt einen Panzer wegziehen, wenn er am Abhang steht :-)
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Für einen Plattenspielertonarm (berührungslose Nachführung) habe ich eine Stepper mit einem TMC2208 Treiber verbaut. (5€ als Replacement für einen 3DDrucker, SilentStep) Hat der TMC2208 per default 16 Mikrosteps so läßt er sich per serielle Schnittstelle recht einfach auf 256 MSteps umstellen. (oder 1,2,4,8,16,31,64,128) Können allerdings nur max 1,5A oder so, aber sind im 3DDrucker deutlich leiser. Wenn eh schon ein µC da ist wäre das womöglich eine Option. Steuerung simple über DIR und STEP und per serial zwischen schnell/langsam umschalten.
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
NichtWichtig schrieb: > Hat der TMC2208 per default 16 Mikrosteps so läßt er sich per serielle > Schnittstelle recht einfach auf 256 MSteps umstellen. (oder > 1,2,4,8,16,31,64,128) Wäre ev. auch eine Option, die Version-2 arbeitet mit 360 Mikrosteps und einer 10Bit PWM, also das Sinus und Cosinussignal wird schon ganz ordentlich generiert, hält der TMC2208 da mit?
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Ein Getriebespiel ist mit meinen Mitteln nicht nachweisbar. Du hast doch einen Laser. Fahre ein paar Mal eine Position x von rechts an und dann ein paar mal die gleiche Position x von links, dann siehts Du ein evtl. Spiel. Bei der Nachführung ist das nicht so wichtig, da die Nachführung ja immer in die gleiche Richtung het, aber beim Aufsuchen von Positionen hilft es, wenn kein Spiel vorhanden ist. Du machst Deine Mikrosteps selber und brauchst dafür grosse Sinustabellen. Warum benutzt Du nicht einen der dafür gemachten Bausteine, z.B. DRV8825 mit 1/32, TMC2225 mit 1/256
Re: Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATm
Bernhard S. schrieb: > Wäre ev. auch eine Option, die Version-2 arbeitet mit 360 Mikrosteps und > einer 10Bit PWM, also das Sinus und Cosinussignal wird schon ganz > ordentlich generiert, hält der TMC2208 da mit? Mit den 360 ųSteps nicht, und 10Bit braucht man dafür auch nicht. Da sollten ja 9Bit reichen. Aber selbst der kleine TMC2208 hat soviel Know How inne, da wirst mit deiner PWM ohne Strome Chopper nicht mitkommen. Denn hast du sowas wie eine Stromerkennung für Slow oder Fast Decay eingebaut? Dazu kann der TMC2208 sogar im Silence Mode arbeiten. Da hört man wirklich nichts mehr von dem Strom Chopper. Ich würde diesen kleinen Treiber schon mehr Aufmerksamkeit schenken. Allerdings unbezahlbar ist die Erfahrung die man sammelt, wenn man selber sowas programmiert. Gruß Steffen
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.