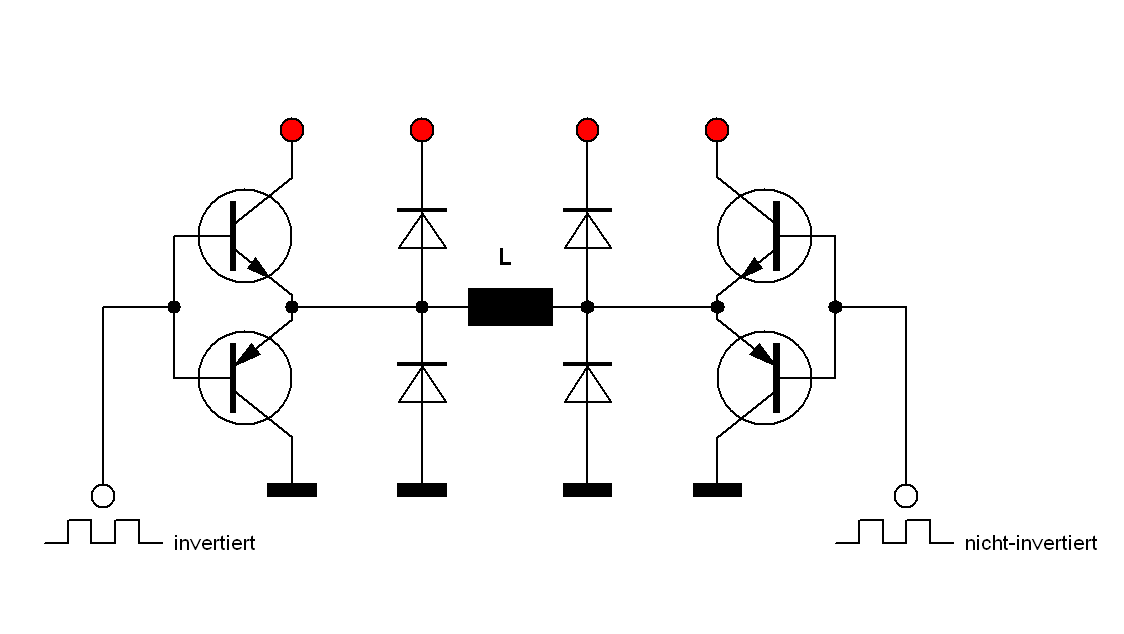
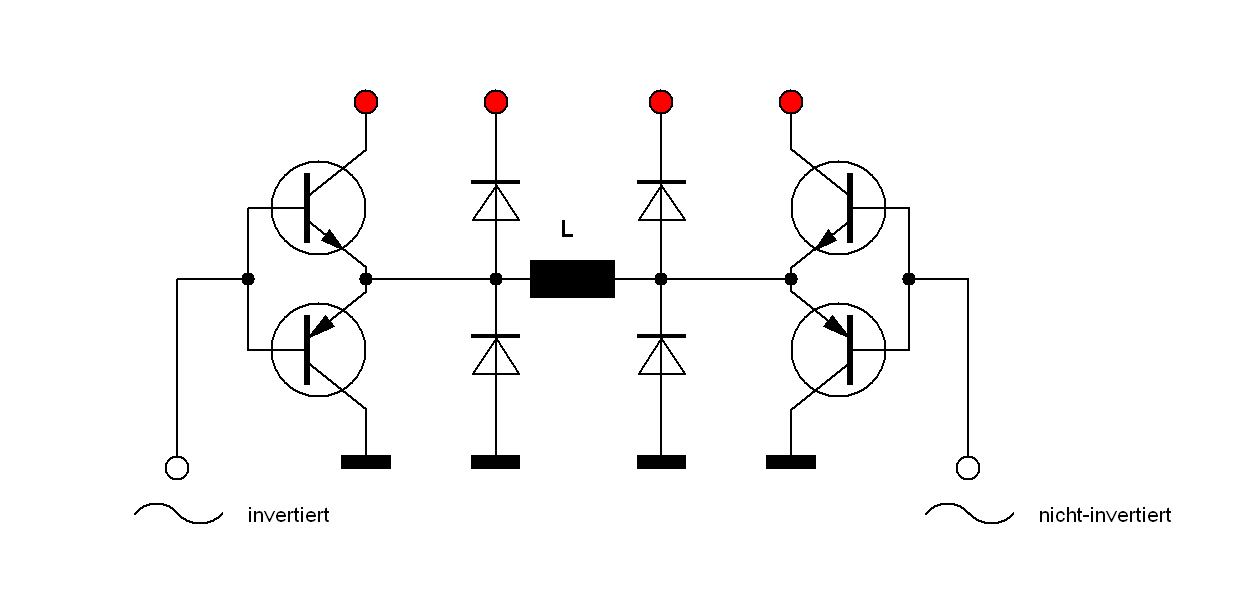
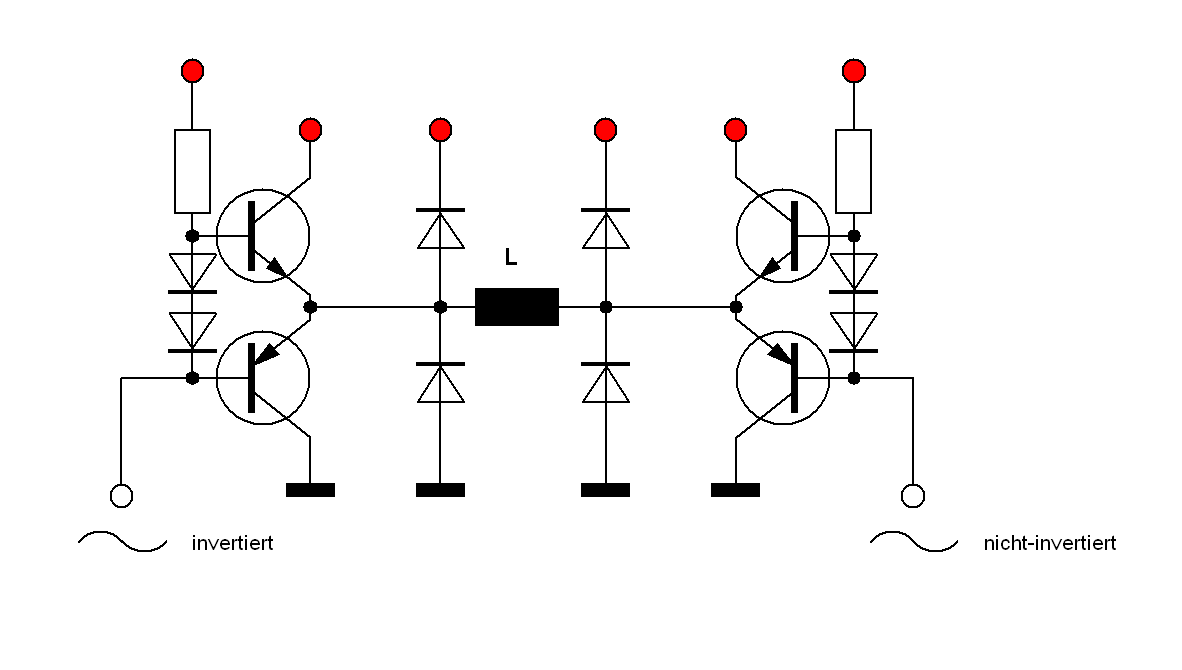
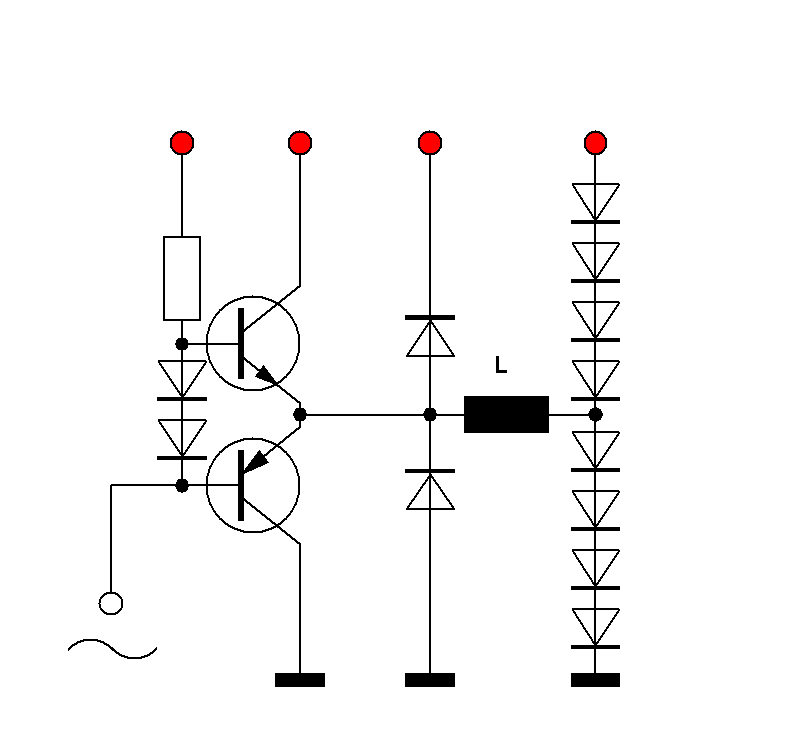
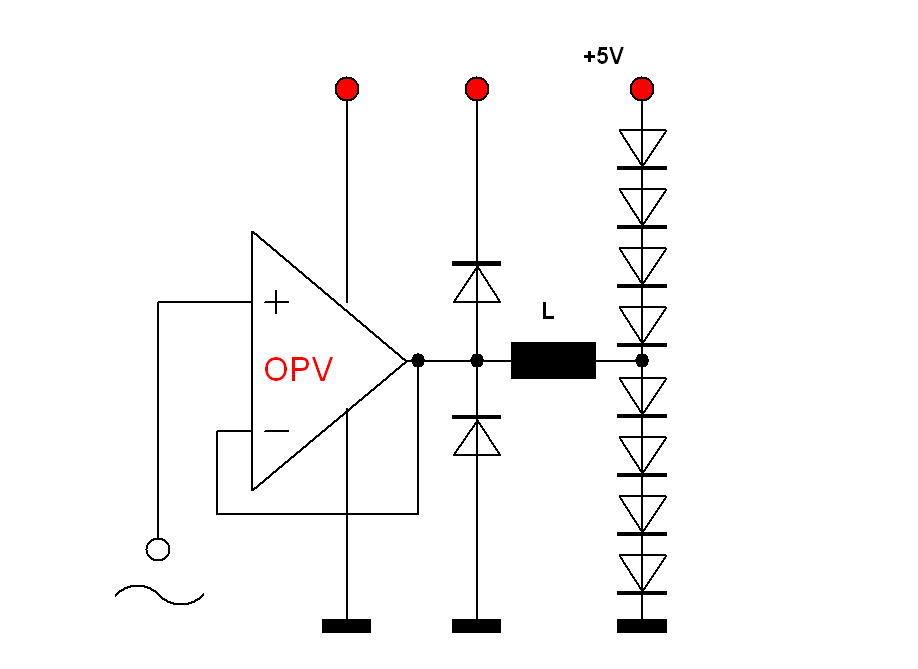


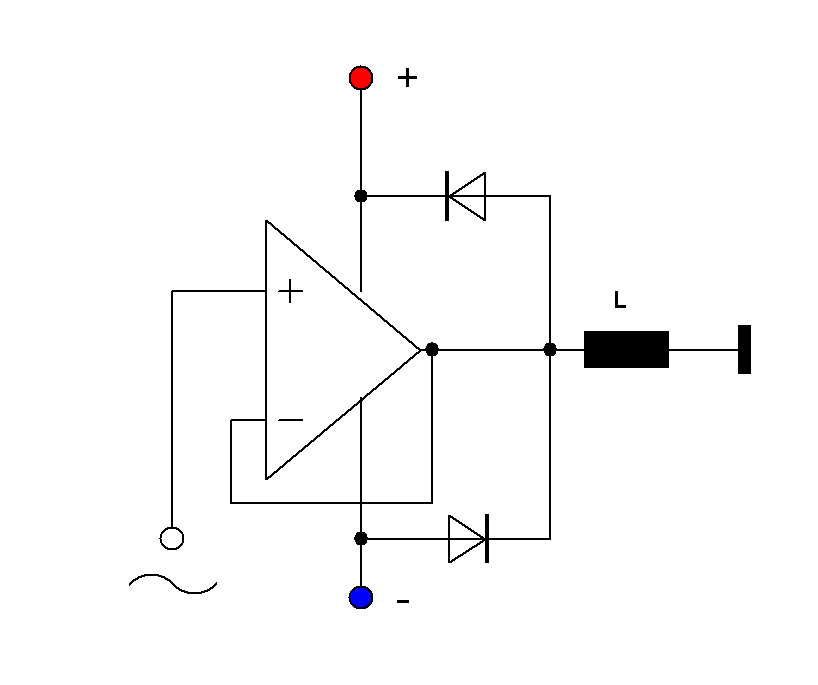
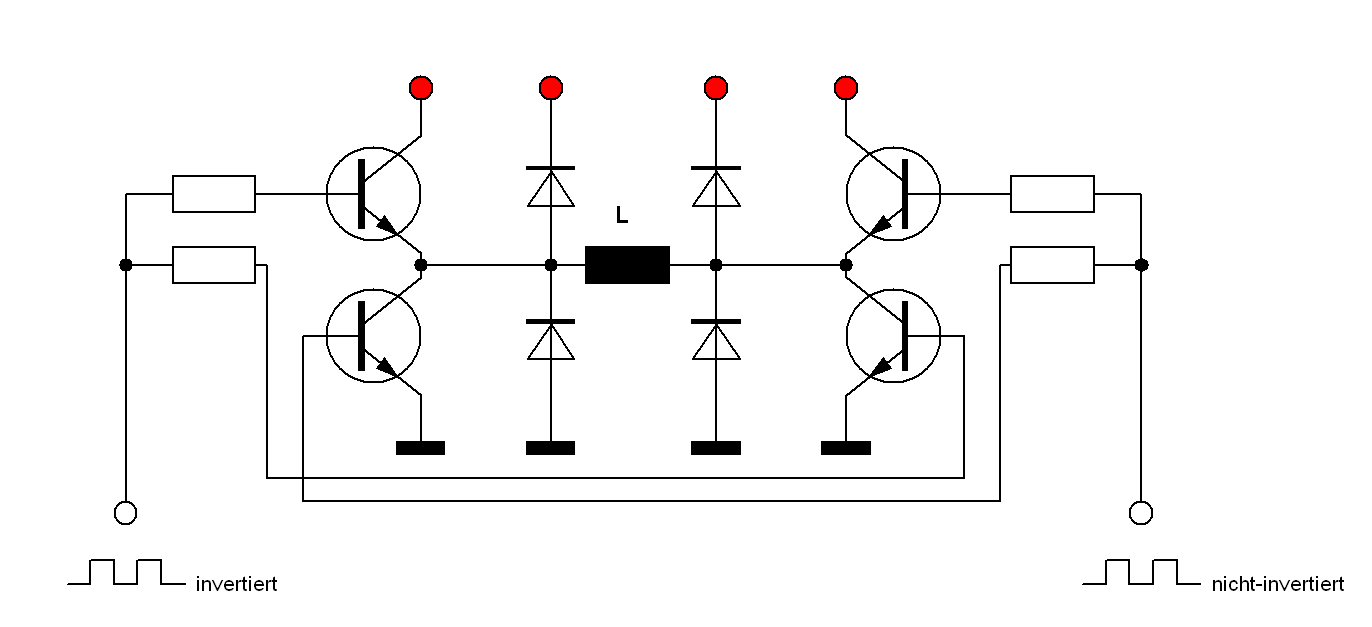
Sicherlich fallen Euch noch weitere Varianten und Grundschaltungen ein, wie ein Stepper / Hybridschrittmotor angesteuert werden kann. Beispiel: Für eine Astro-Nachführeinrichtung soll der Stepper in Winkelsekundenbereich das schwere Objektiv und die Nachführeinheit, mit einem Getriebe 17:120,ohne zu ruckeln, nachführen. Also für diese Variante ist der Vollschrittbetrieb nicht ganz so gut geeignet. Eine mögliche Lösung wäre, die Wicklungen des Steppers mit einem Sinussiganal zu versorgen. Variante-A: geeignet für den Vollschrittbetrieb, Nachteil bei Ansteuerung mit PWM wird der Motor "hochohmig", es fließt weniger Motorstrom, das Drehmoment, bzw. der Haltstrom verringert sich Variante-B: Ansteuerung mit Sinussignal ist möglich, aber Ausgangssignal ist verzerrt, da die Transistoren nicht in der Nähe des Arbeitspunktes arbeiten. Variante-C: Arbeitspunktverbesserung Variante-D: Nun keine Brückenschaltung mehr, die Halbe Brücke wird durch Dioden ersetzt. Variante-E: Ein OPV sorgt für den entsprechenden Motorstrom. Vorteil Variante D+E: Es wird nur ein Sinusgenerator (z.B. PWM + RC Glied) für eine Wicklung benötigt. Anmerkung: Bei meinem Motorexemplar beträgt der Ohmische Anteil der Wicklung 1 Ohm. Bernhard
Angehängte Dateien:
-

A.png
6,8 KB -

B.png
6,9 KB -

C.png
8 KB -

D.png
4 KB -

E.png
6,4 KB -

Prototyp.jpg
240 KB -

DPM60SH65.png
2,1 MB
Bernhard S. schrieb: > Vorteil Variante D+E: Es wird nur ein Sinusgenerator (z.B. PWM + RC > Glied) für eine Wicklung benötigt. Durch die vielen Dioden hast du aber Spannungseinbußen. Für einen Sinus ist die Variante C die beste. Die Phasenumkehrstufe lässt sich mit einem vorgespanntem Transistor umsetzen. Das nichtinvertierte Sinussignal wird am Emitter abgegriffen und das um 180° invertierte Sinussignal am Kollektor.
Ach Du grüne Neune schrieb: > Das nichtinvertierte Sinussignal wird am Emitter abgegriffen und das um 180° invertierte Sinussignal am Kollektor. Du hast Recht. Nur der Spannugshub leidet durch den zusätzlichen Transistor und Du hast mehr Hardwareaufwand.
Bernhard S. schrieb: > Sicherlich fallen Euch noch weitere Varianten und Grundschaltungen ein, > wie ein Stepper / Hybridschrittmotor angesteuert werden kann. Mit ein passenden stromregelnden Mikroschritt-IC ? Upps, das machen ja 99% aller anderen Leute, das darf man so nicht machen, da müsste man sich ja mal informieren was in den letzten 40 Jahren der Elektronikentwicklung so stattgefunden hat.
Hast du dir die "Pololu-Boards" aus der DIY-CNC-Szene schon mal angesehen? Der hier https://www.pololu.com/product/3140 kann bis 4A kontinuierlichen Motorstrom und bis 1/256 Microstepping. Wenn die PWM-Frequenz gut oberhalb des Bereichs des Motor-RL fällt, ist dir das ruckelfrei genug? Dann gibt es noch von Trinamic die "silent" Motortreiber. Da weiß ich jetzt keinen, der deine 2,8A-Motoren voll ausfährt. Frage wäre auch, ob das überhaupt nötig ist. Grüße, mf
Bernhard S. schrieb: > Du hast mehr Hardwareaufwand. Bei kostbaren optischen Geräten sollte man diesen Hardwareaufwand nicht scheuen.
Var. E abändern: Motor rechte Seite an 0 Volt (GND) u. OPV mit +/- Ub gg. GND betreiben. Ergibt symmetrisches Ausgangssignal u. keine Übernahmeverzerrungen. Gruß, fredl
Bernhard S. schrieb: > Sicherlich fallen Euch noch weitere Varianten und > Grundschaltungen ein, wie ein Stepper / > Hybridschrittmotor angesteuert werden kann. Naja, mir drängt sich vor allem eine methodische Empfehlung auf: Trenne den Leistungsteil gedanklich von der Erzeugung der Steuersignale. Für die Leistungsstufen kann man grundsätzlich ohne weiteres auch Stromchopperstufen nehmen; deren Stromsollwert lässt sich ja i.d.R. irgendwie analog manipulieren. Wenn es stetige (analoge) Leistungsstufen sein sollen, bieten sich m.E. OPVs mit nachgeschalteten Transistoren an; Darlingtons bzw. Komplementär-Darlington sind sicher von Vorteil, Ruhestrom ist wahrscheinlich verzichtbar. Bei ca. 3V an der Wicklung wird man schon 9V...12V Speisespannung benötigen; der Wirkungsgrad ist also nicht so dolle. Mit Sziklai-Paaren (=Komplementär- Darlington) kommt man vielleicht auch mit 6V aus. Den notwendigen Vier-Phasen-Drehstrom zur Ansteuerung zu erzeugen ist dann nochmal ein anderes Thema. :)
Danke Euch für die vielen Anregungen. Achim M. schrieb: > Motorstrom und bis 1/256 Microstepping Mit dieser Schrittweite arbeite ich momentan auch ganz erfolgreich, allerdings mit Transistoren für wenige Ct. Variante "F", ich denke Fredl hat es so gemeint. MaWin schrieb: > das machen ja 99% aller anderen Leute Demnach ist nichts anderes mehr zugelassen, interessant^^ Warum werden nur 1% Deiner Beiträge als lesenswert bewertet. Der TDA2030 könnte sich z.B. als Leistungs-OPV eignen. Kennt jemand weitere OPVs, Stereo wäre schön :-)
Egon D. schrieb: > Wenn es stetige (analoge) Leistungsstufen sein sollen, > bieten sich m.E. OPVs mit nachgeschalteten Transistoren > an; Darlingtons bzw. Komplementär-Darlington sind sicher > von Vorteil, Ruhestrom ist wahrscheinlich verzichtbar. Normalerweise sind Schrittmotorspulen Induktivitäten, die sich zur Glättung eines PWM-modulierten Stromes geradezu anbieten. Was will man da mit Analogansteuerung rumeiern.
Hallo Bernhard, Bernhard S. schrieb: > MaWin schrieb: >> das machen ja 99% aller anderen Leute > > Demnach ist nichts anderes mehr zugelassen, interessant^^ Aber wo er Recht hat, hat er Recht. Wenn technisch nichts gegen den Einsatz eines Mikroschritt-Treibers spricht, macht es keinen Sinn, dass Rad neu zu erfinden. Meine ersten Mikroschritt Schrittmotorsteuerungen waren auch diskret aufgebaut (mit µC, DAC, Stromregler und Mosfet H-Brücke). Das ist aber auch gut 20 Jahre her, das ich die gebaut habe. Gerade für kleine Motoren bekommt man das heute alles fertig in einem Chip. Mit freundlichen Grüßen Thorsten Ostermann
Moin, Fertige Schrittmotorendstufen mit Mikrostepping kosten wirklich nicht die Welt und sind bestens erprobt. Z.b.: DM556 von Leadshine hat einen digitalen Regler und fährt sehr weich (auch bei etwas gröberer Schritteinstellung). 45€ (gibts vielleicht noch günstiger mit anderen Strom/Spannungs Werten) https://www.sorotec.de/shop/Schrittmotorkarte-Leadshine-DM542EU-Digital.html Wenn's noch billiger sein soll gibt es kleine Endstufen mit den A3... Chips aus China. Sorry Thorsten ;-). schönen Gruß, Alex
> Normalerweise sind Schrittmotorspulen Induktivitäten, die sich zur > Glättung eines PWM-modulierten Stromes geradezu anbieten. Was will man > da mit Analogansteuerung rumeiern. Formal gesehen sind es dann Abwärtswandler, im PWM-Betrieb fließt weniger Strom, dadurch verringert sich das Drehmoment am Rotor. Um das Auszugleichen wäre eine höhere Spannung erforderlich. Danke für den Tipp Alex schrieb: > Z.b.: DM556 von Leadshine hat einen digitalen Regler Versorgungsspannung 20...50V, vermutlich wird der Stepper dann auch mit PWM betrieben.
Ich würde es mir leicht machen wollen... Für sowas benutze ich gern die TMC2130-Module, z.B. https://www.berrybase.de/raspberry-pi-co/sensoren-module/motor-robotik/tmc2130-schrittmotortreiber-modul# Ansteuerung geht über SPI (gibts auch wie die schon erwähnten DM556 mit Step/Dir-Interface). Just my 2ct Hermann
Wolfgang schrieb: > Egon D. schrieb: >> Wenn es stetige (analoge) Leistungsstufen sein sollen, >> bieten sich m.E. OPVs mit nachgeschalteten Transistoren >> an; Darlingtons bzw. Komplementär-Darlington sind sicher >> von Vorteil, Ruhestrom ist wahrscheinlich verzichtbar. > > Normalerweise sind Schrittmotorspulen Induktivitäten, die > sich zur Glättung eines PWM-modulierten Stromes geradezu > anbieten. Was will man da mit Analogansteuerung rumeiern. Naja, beispielsweise bei einer Anwendung, die praktisch überhaupt keine Anforderungen an die Dynamik des Antriebes stellt -- wie eben z.B. eine Nachführung für Astro-Aufnahmen. Wozu eine Stromregelung, wenn man ohnehin nur genau eine Geschwindigkeit braucht? Unter Astro-Amateuren trifft man auch durchaus Leute, die zwar wissen, an welcher Seite der Lötkolben heiss wird, für die aber ein zu programmierender µC trotzdem eine echte Hürde ist.
Hermann G. schrieb: > Für sowas benutze ich gern die TMC2130-Module, z.B. lt Datenblatt: Voltage Range 4.75… 46V DC Bei einer Betriebsspannung von 6V, welches Drehmoment könnte dann bei diesem Modul der Stepper aufbringen?
Bernhard S. schrieb: > Formal gesehen sind es dann Abwärtswandler, im > PWM-Betrieb fließt weniger Strom, dadurch verringert > sich das Drehmoment am Rotor. > > Um das Auszugleichen wäre eine höhere Spannung > erforderlich. Kann es sein, dass Du das Prinzip des kontinuierlichen Drehfeldes nicht verstanden hast?
Bei den TMC gibt es immer die Logik-Spannung (3V...5V) und die Motorspannung. Das erreichbare Drehmoment hängt natürlich von der Motorspannung ab. Es hat aber nichts mit dem Modul zu tun!
Thorsten O. schrieb: > Bernhard S. schrieb: >> MaWin schrieb: >>> das machen ja 99% aller anderen Leute >> >> Demnach ist nichts anderes mehr zugelassen, >> interessant^^ > > Aber wo er Recht hat, hat er Recht. Nun ja, für einen Hobbyisten ist das gern genommene Totschlag-Argument "Das macht in der Industrie kein Mensch mehr so!" schlicht und ergreifend irrelevant. Hobby ist keine industrielle Anwendung.
Angehängte Dateien:
-

Strom_Wicklung1_und_Wicklung2.jpg
96 KB -

Strom.jpg
96 KB
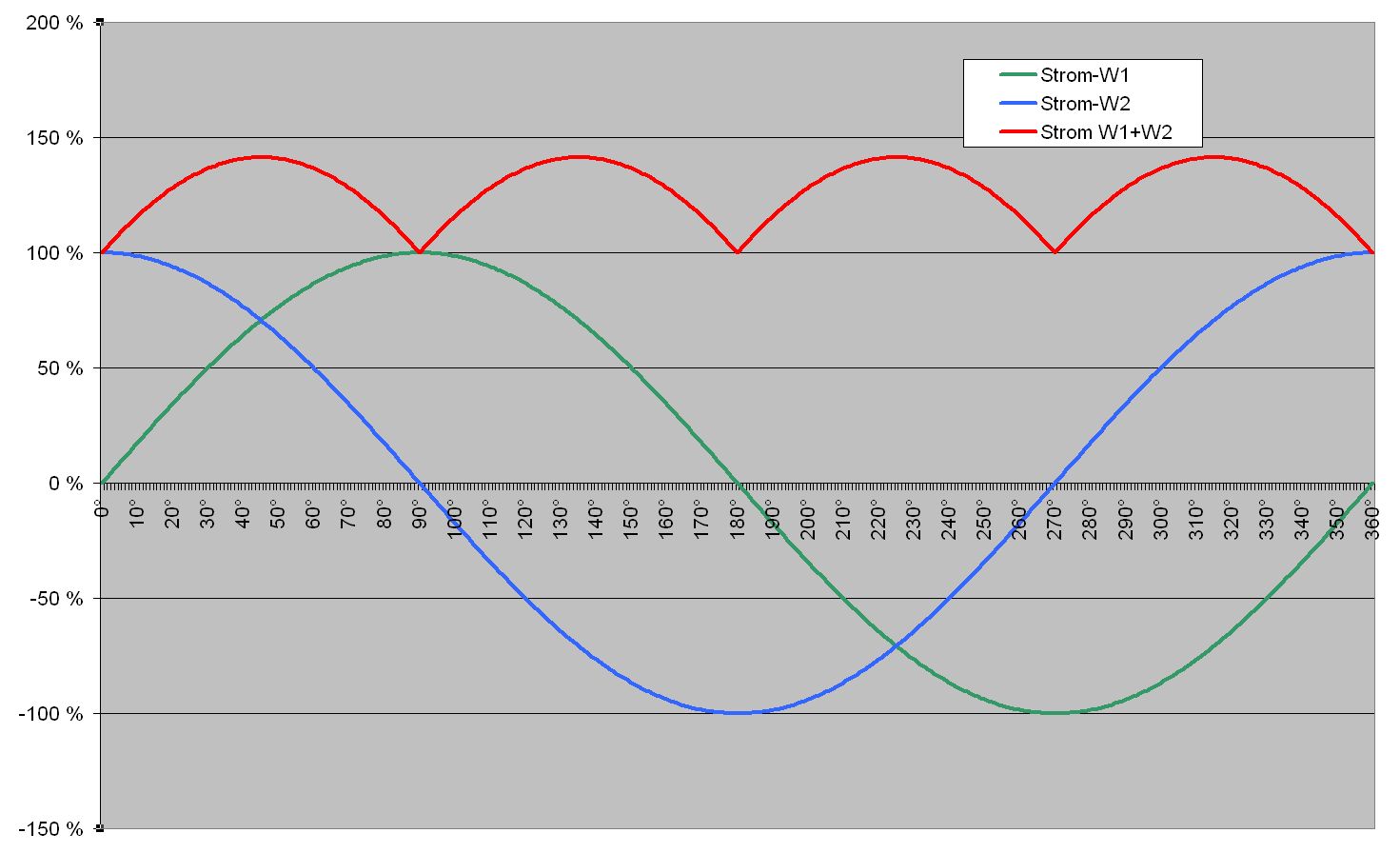
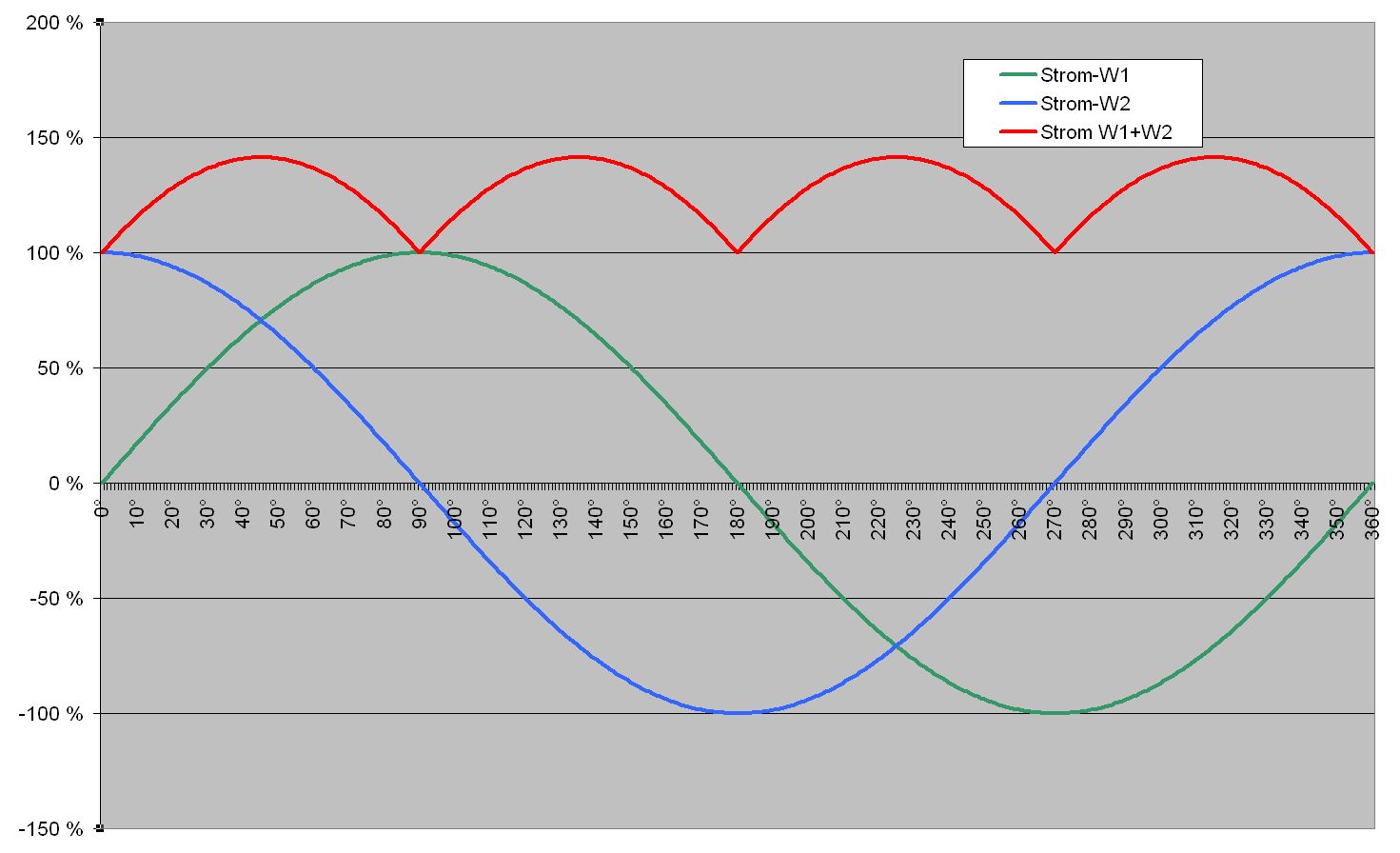
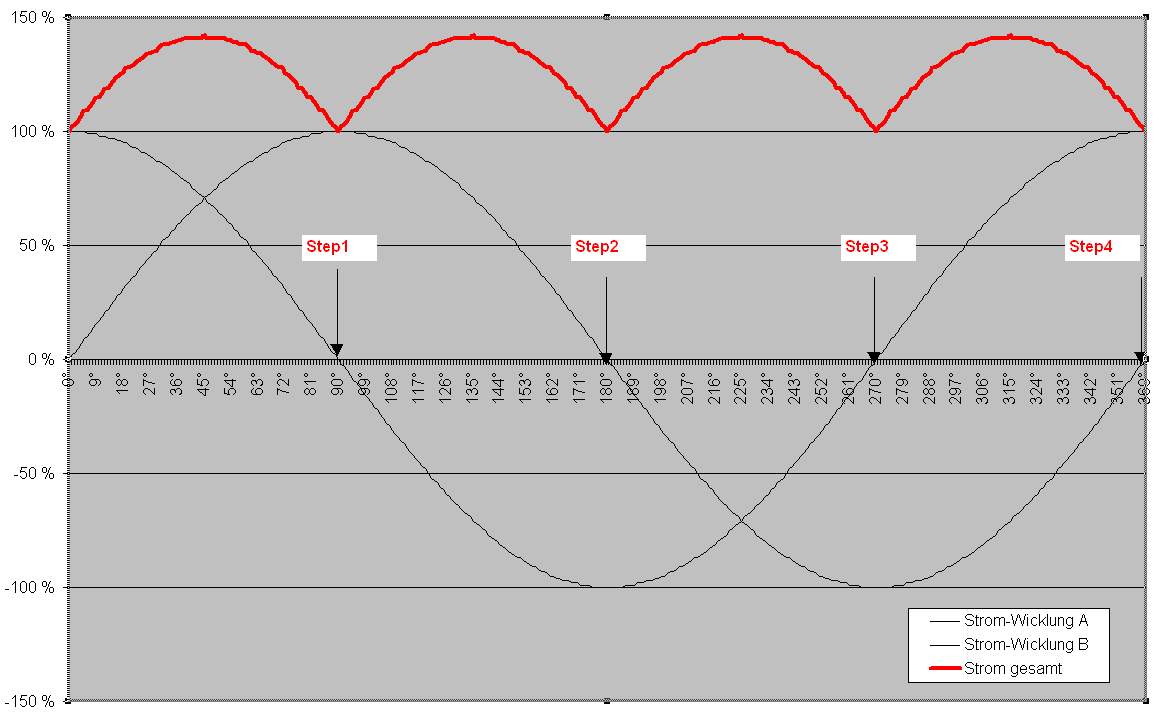
Egon D. schrieb: > Kann es sein, dass Du das Prinzip des kontinuierlichen > Drehfeldes nicht verstanden hast? Das glaube ich nicht, denn der Prototyp funktioniert schon ganz gut. Das Microstepping konnte ich mit einem Laser, der an der Mechanik montiert war/ist und und den projektierten Lichtpunkt, in mehreren Metern Entfernung, untersuchen. Wie kommst Du darauf? Hermann G. schrieb: > Das erreichbare Drehmoment hängt natürlich von der > Motorspannung ab. Genauer gesagt, vom Stromfluss. Und eine PWM bewirkt eine "Hochohmigkeit" der Induktivität. Egon D. schrieb: > Wozu eine Stromregelung, wenn man ohnehin > nur genau eine Geschwindigkeit braucht? An dieser Stelle komme ich mit dem Begriff "Stromregelung" nicht ganz zurecht. Die Spulen müssen permanent bestromt sein, damit der Stepper nicht seine Position ändert. Auch die Mechanik zeigt teilweise Klemmerscheinungen. Der Stepper muss, auch im Microsteppingbetrieb ein hohes Drehmoment aufbringen. Anmerkung: Die Mechanik, Kamera und Spiegelteleskop (Russentonne) wiegt ca. 10kg. Haft- und Gleitreibung sollte man nicht unterschätzen. Im Bild Strom ist der ideale Stromfluss für einen Vollschritt dargestellt, egal ob per PWM erzeugt oder analoge Bestomung.
Bernhard S. schrieb: > Egon D. schrieb: >> Kann es sein, dass Du das Prinzip des >> kontinuierlichen Drehfeldes nicht verstanden hast? > > Das glaube ich nicht, [...] > Wie kommst Du darauf? Deswegen: > [...] Und eine PWM bewirkt eine "Hochohmigkeit" > der Induktivität. Die "Hochohmigkeit" ist ja beabsichtig, denn sie bewirkt, dass mit sinkendem Tastgrad der PWM auch kontinuierlich weniger Strom fließt -- genau das, was man für ein gleichmäßiges Drehfeld haben will. (Dass der Strom in der jeweils anderen Wicklung entsprechend ansteigen und sich der Tastgrad entsprechend vergrößern muss, ist natürlich klar.) > Egon D. schrieb: >> Wozu eine Stromregelung, wenn man ohnehin >> nur genau eine Geschwindigkeit braucht? > > An dieser Stelle komme ich mit dem Begriff > "Stromregelung" nicht ganz zurecht. Die Spulen > müssen permanent bestromt sein, Nein, das ist falsch. Richtig ist: Es muss ständig Strom in der Wicklung fließen -- aber ob dieser Strom von außen eingeprägt ist (="bestromt") oder Freilaufstrom, das ist egal. Genau das ist das Prinzip der Stromregelung mittels Chopperstufen. Auch klar: Der Stromsollwert der Regelung folgt einer Sinus- bzw. Cosinusfunktion, sonst kommt keine glatte Drehung zustande. > Im Bild Strom ist der ideale Stromfluss für einen > Vollschritt dargestellt, Nein -- für vier Vollschritte, d.h. für einen elektrischen Winkel von 360°. Ein Vollschritt bezeichnet einen Kommutierungsvorgang, d.h. elektrisch 90°. > egal ob per PWM erzeugt oder analoge Bestomung. Genau.
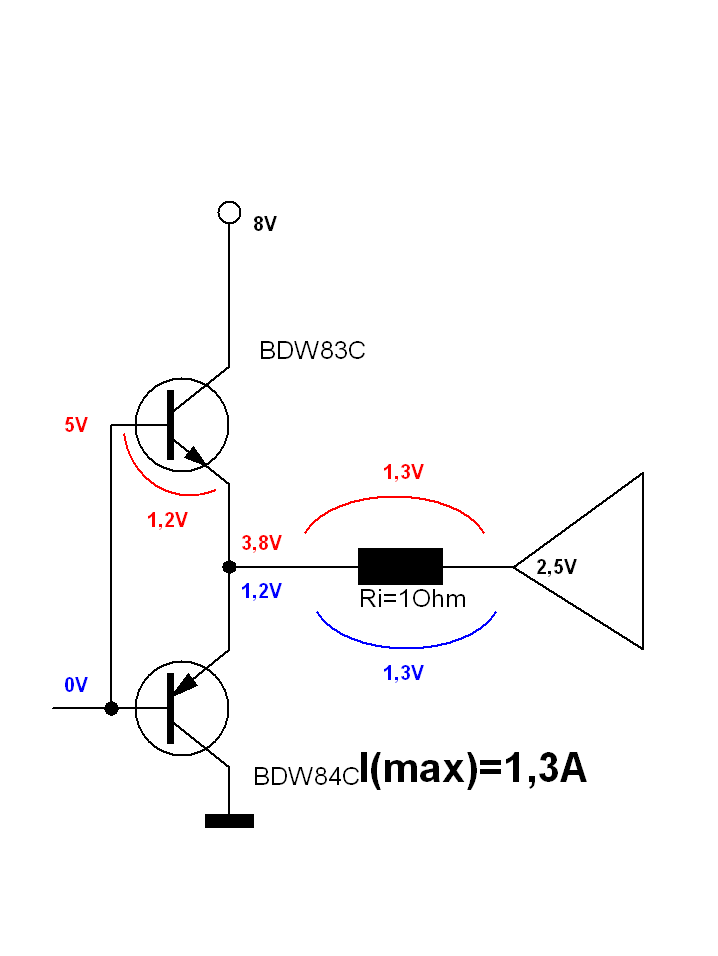
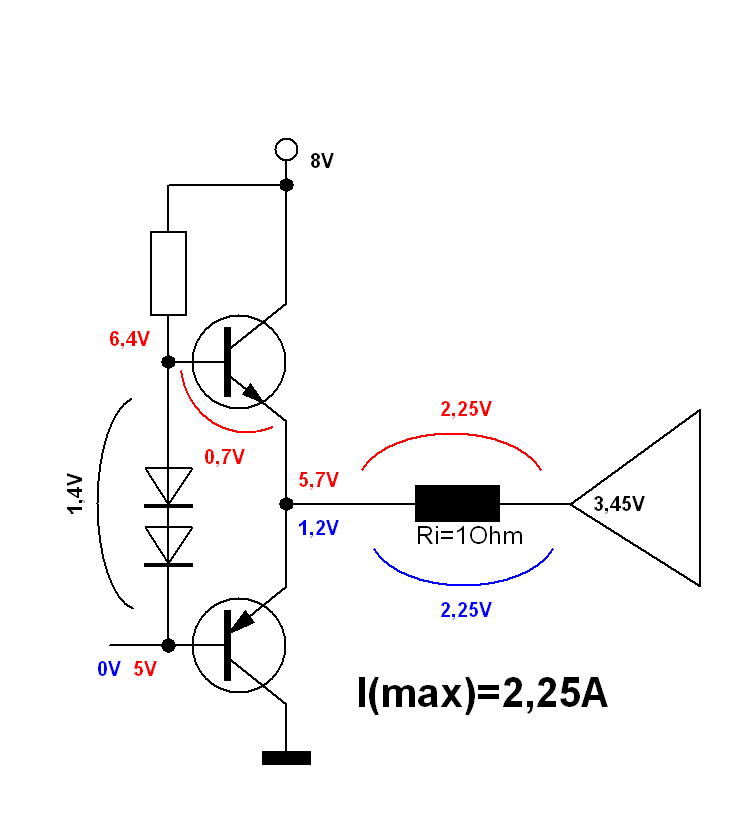
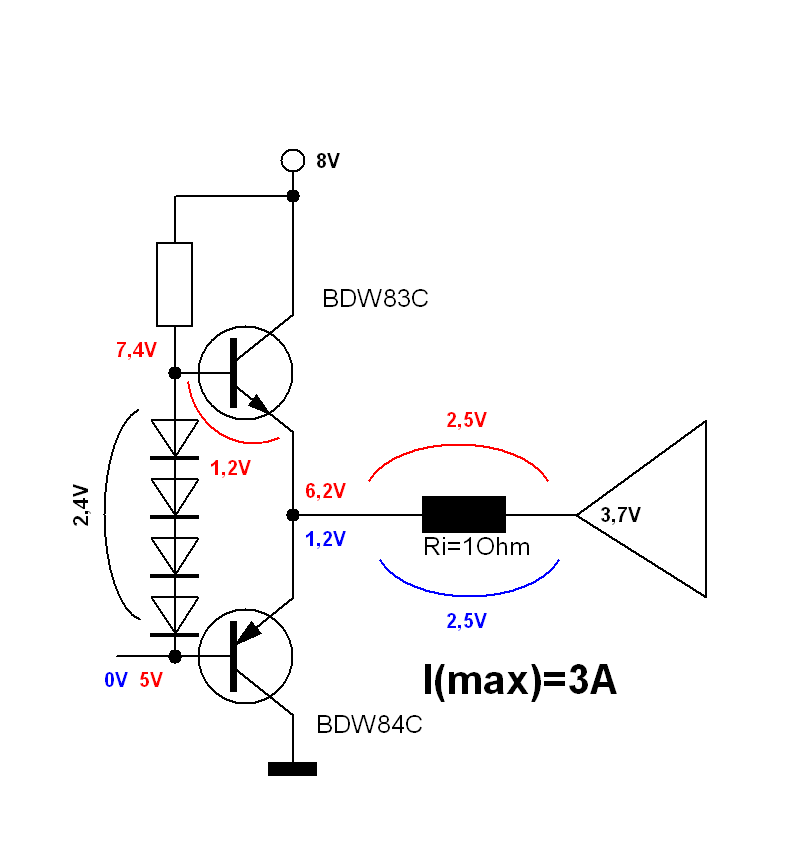
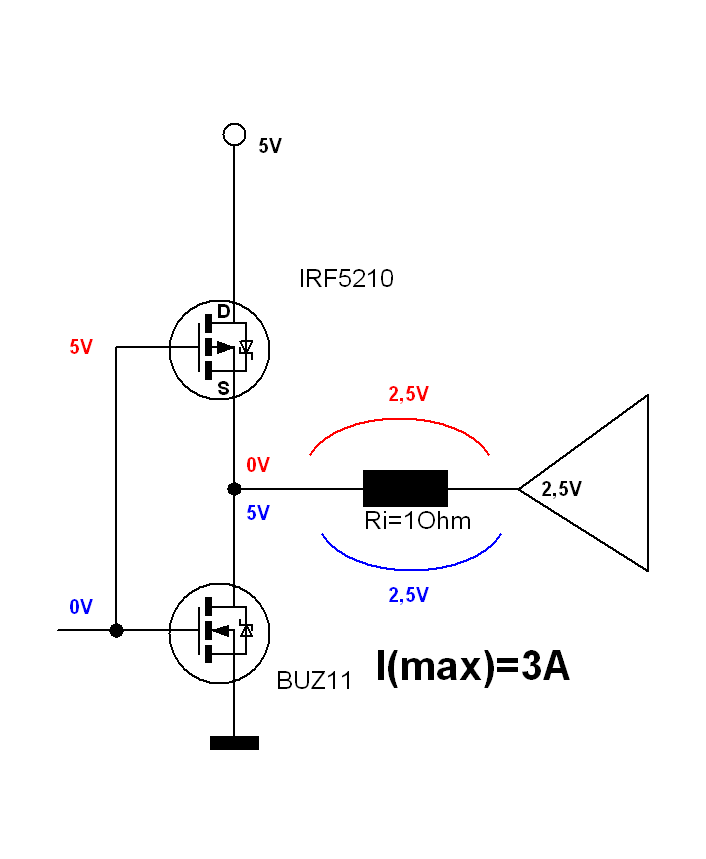
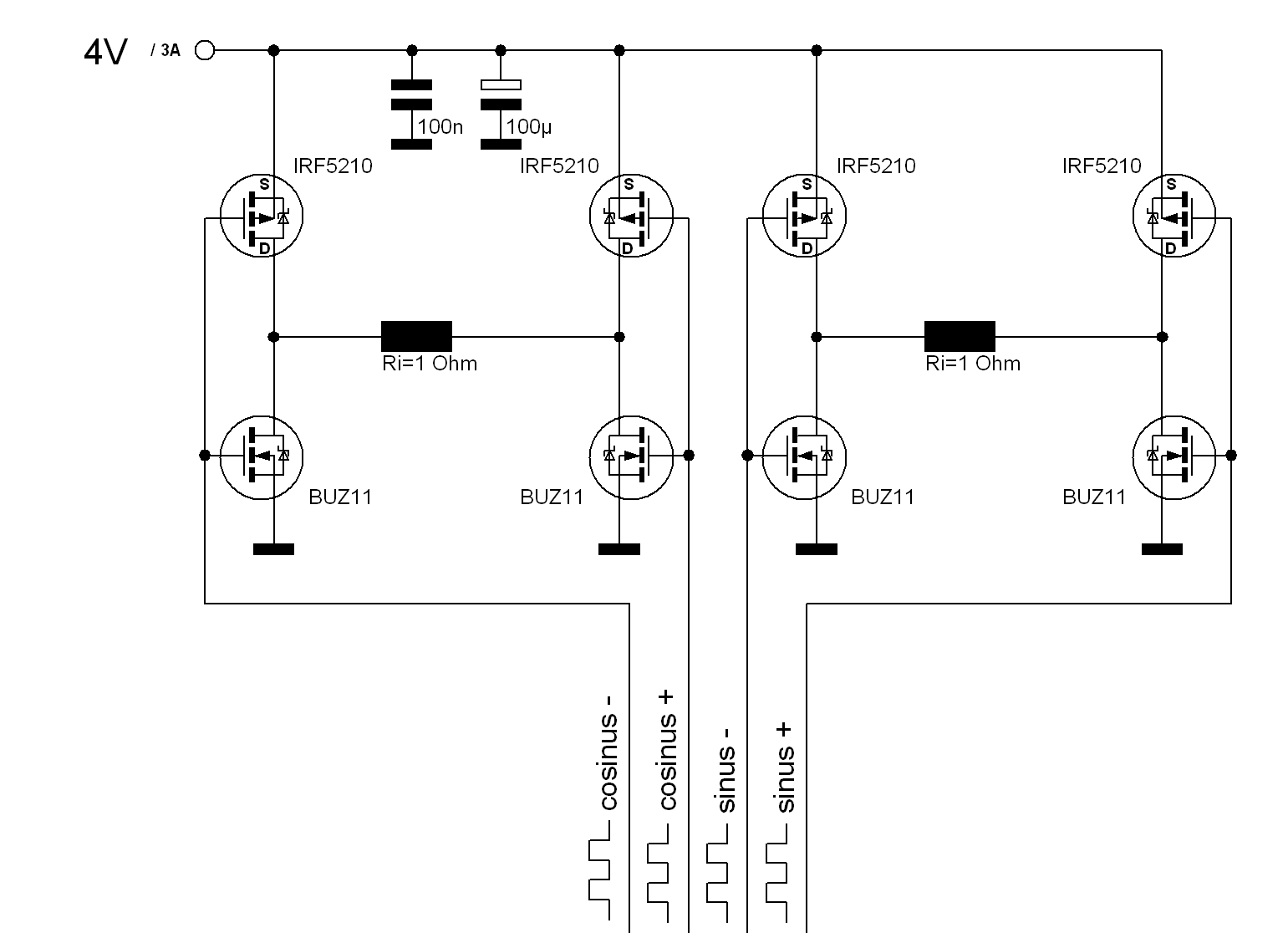
Mögliche Varianten einer Enstufe bzw. Treiberstufe. Vorteil: nur ein Sinussignal ist pro Wicklung erforderlich, egal ob PWM erzeugt oder analog. Eine Halbbrücke wird durch eine Konstant-spannungsschaltung ersetzt. Untersucht habe ich die Extremzuszände am Eingang +5V(rot) bzw. 0V(blau). Natürlich ändern sich die Ströme im PWM-Betrieb, eine Anhebung der Versorgungsspannung kompensiert diesen Effekt. Varianten 3 + 4 sind am leistungsstärksten. Bei Variante 4 bin ich mir momentan nicht ganz sicher, ob es im Analogbetrieb nicht zu Einer Überschneidung der Kennlinien kommt, es darf kein Strom gleichzeitig durch die FETs fließen. Die OPV-Beschaltung habe ich, wegen der Übersichtlichkeit, einfach mal ausgeblendet. Anmerkung: Die BDW Transistoren sind Darlington-Transistoren. Mir fällt gerade auf, bei Variante 3+4 ist I(max) nur 2,5A...vertippt, sorry Egon D. schrieb: > Die "Hochohmigkeit" ist ja beabsichtig, denn sie > bewirkt, dass mit sinkendem Tastgrad der PWM auch > kontinuierlich weniger Strom fließt Nehmen wir an der Tastgrad ist, als Bsp. 50%, und Du änderst die PWM Frequenz von 1kHz auf einige MHz. Durch die Induktivität fließt dann kaum noch ein Strom, der Stepper verliert sein Drehmoment und seine Position. Anders ausgedrückt, ein PWM-Verfahren erfordert immer eine höhere Versorgungsspannung, um die induktive werdende Hochohmigkeit zu kompensieren. Egon D. schrieb: > Richtig ist: Es muss ständig Strom in der Wicklung fließen Ich wiederspreche nur ungern, aber bei einem Winkel von 0° oder 180° ist eine Spule stromlos, die andere wird in der Zeit maximal bestromt und übernimmt die Arbeit. Egon D. schrieb: >> Im Bild Strom ist der ideale Stromfluss für einen >> Vollschritt dargestellt, > > Nein -- für vier Vollschritte, d.h. für einen > elektrischen Winkel von 360°. Ein Vollschritt > bezeichnet einen Kommutierungsvorgang, d.h. > elektrisch 90°. Ich dachte immer, ein Vollschritt ist der Zyklus, wenn alles wieder von vorne beginnt.... grübel
Bernhard S. schrieb: > Egon D. schrieb: >> Die "Hochohmigkeit" ist ja beabsichtig, denn sie >> bewirkt, dass mit sinkendem Tastgrad der PWM auch >> kontinuierlich weniger Strom fließt > > Nehmen wir an der Tastgrad ist, als Bsp. 50%, Schön. > und Du änderst die PWM Frequenz von 1kHz auf einige > MHz. Gut. > Durch die Induktivität fließt dann kaum noch ein > Strom, Würde es Dir etwas ausmachen, zwischen dem fließenden Wechselstrom und dem mittleren Gleichstrom zu unterscheiden? Eine PWM, die zwischen 0V und U_max hinundherschaltet, ist ein Mischsignal aus einer (variablen) Gleichspannung und einer Wechselspannung. Der Gleichanteil wird von der Induktivität nicht beeinflusst. > der Stepper verliert sein Drehmoment und seine > Position. Warum sollte er? Der überlagerte Wechselstrom (="Ripple") ist natürlich sehr niedrig, wenn die PWM-Frequenz hoch ist -- aber das ist für den mittleren fließenden Gleichstrom völlig egal. (Parasitäre kapazitive Effekte mal vernachlässigt.) > Anders ausgedrückt, ein PWM-Verfahren erfordert immer > eine höhere Versorgungsspannung, um die induktive > werdende Hochohmigkeit zu kompensieren. Sicher -- aber aus völlig anderen Gründen, als Du denkst. > Egon D. schrieb: >> Richtig ist: Es muss ständig Strom in der Wicklung >> fließen > > Ich wiederspreche nur ungern, aber bei einem Winkel > von 0° oder 180° ist eine Spule stromlos, die andere > wird in der Zeit maximal bestromt und übernimmt die > Arbeit. Echt jetzt? Du willst Korinthen kacken? Der entscheidende Punkt war, dass "in der Wicklung fließt Strom" KEINESWEGS identisch ist mit "die Wicklung wird von der externen Spannungsquelle bestromt". Natürlich gibt es auch Zeitpunkte, in denen der Sollstrom einer Wicklung gerade gleich Null ist, aber da ist der andere Wicklungsstrom maximal. > Egon D. schrieb: >>> Im Bild Strom ist der ideale Stromfluss für einen >>> Vollschritt dargestellt, >> >> Nein -- für vier Vollschritte, d.h. für einen >> elektrischen Winkel von 360°. Ein Vollschritt >> bezeichnet einen Kommutierungsvorgang, d.h. >> elektrisch 90°. > > Ich dachte immer, ein Vollschritt ist der Zyklus, > wenn alles wieder von vorne beginnt.... grübel Nein. Ein Schritt ist eine Kommutierung, d.h. von + + zu + - ist ein Vollschritt, von + - zu - - ist ein Vollschritt, von - - zu - + ist ein Vollschritt, und von - + zu + + ist ein Vollschritt. Sollte genau so im Datenblatt Deines Motors stehen.
Bernhard S. schrieb: > Ich dachte immer, ein Vollschritt ist der Zyklus, wenn alles wieder von > vorne beginnt. Spätestens wenn man das allererste Mal seinen allerersten Schrittmotor in Bewegung gebracht hat weiss man aber, dass das falsch war. Du hast also noch nie einen Schrittmotor benutzt, meinst aber mit deinen merkwürdigen Schaltungen hier gleich Mal alles viel besser zu machen als der Rest der deiner Meinung nach dummen Welt. Voll der Film hier ..
Bernhard S. schrieb: > Eine Halbbrücke wird durch eine > Konstant-spannungsschaltung ersetzt. Und wie implementierst du diese Spannungsquelle, die sowohl Strom abgeben als auch aufnehmen kann? Wenn du das gelöst hast: was ist jetzt an deiner Lösung noch einfacher oder besser als an den Standardlösungen, die alle anderen verwenden? Bernhard S. schrieb: > Bei Variante 4 bin ich mir momentan nicht ganz sicher, ob es im > Analogbetrieb nicht zu Einer Überschneidung der Kennlinien kommt, Kein Problem: da der pFET verpolt ist wird die Schaltung ohnehin schnell abrauchen. Bei Schaltung 2 und 3 solltest du dich mit dem Temperaturgang der Transistoren beschäftigen, sonst droht dir dort dasselbe. Bernhard S. schrieb: > Nehmen wir an der Tastgrad ist, als Bsp. 50%, und Du änderst die PWM > Frequenz von 1kHz auf einige MHz. > Durch die Induktivität fließt dann kaum noch ein Strom, der Stepper > verliert sein Drehmoment und seine Position. Wenn du etwas besseres entwickeln willst als die etablierten Standard-Motortreiber, dann solltest du zumindest versuchen, deren Funktion nachzuvollziehen. Durch die Induktivität fließt in deinem Szenario kaum hochfrequenter Wechselstrom. Aber es fließt mit Chopperansteuerung von 50% nicht weniger Strom durch sie, als wenn du eine Analogansteuerung mit der halben Versorgungsspannung machen würdest. Und bei stromgeregelten Choppertreibern wird der Sollwert des Stroms oft besser erreicht als mit deinen Versuchen einer Analogansteuerung (jedenfalls dann, wenn die Schritte etwas schneller werden). Dass 1MHz als Chopperfrequenz eine unsinnige Wahl wäre, lassen wir mal außen vor.
Angehängte Dateien:
-

Getriebe.jpg
210 KB
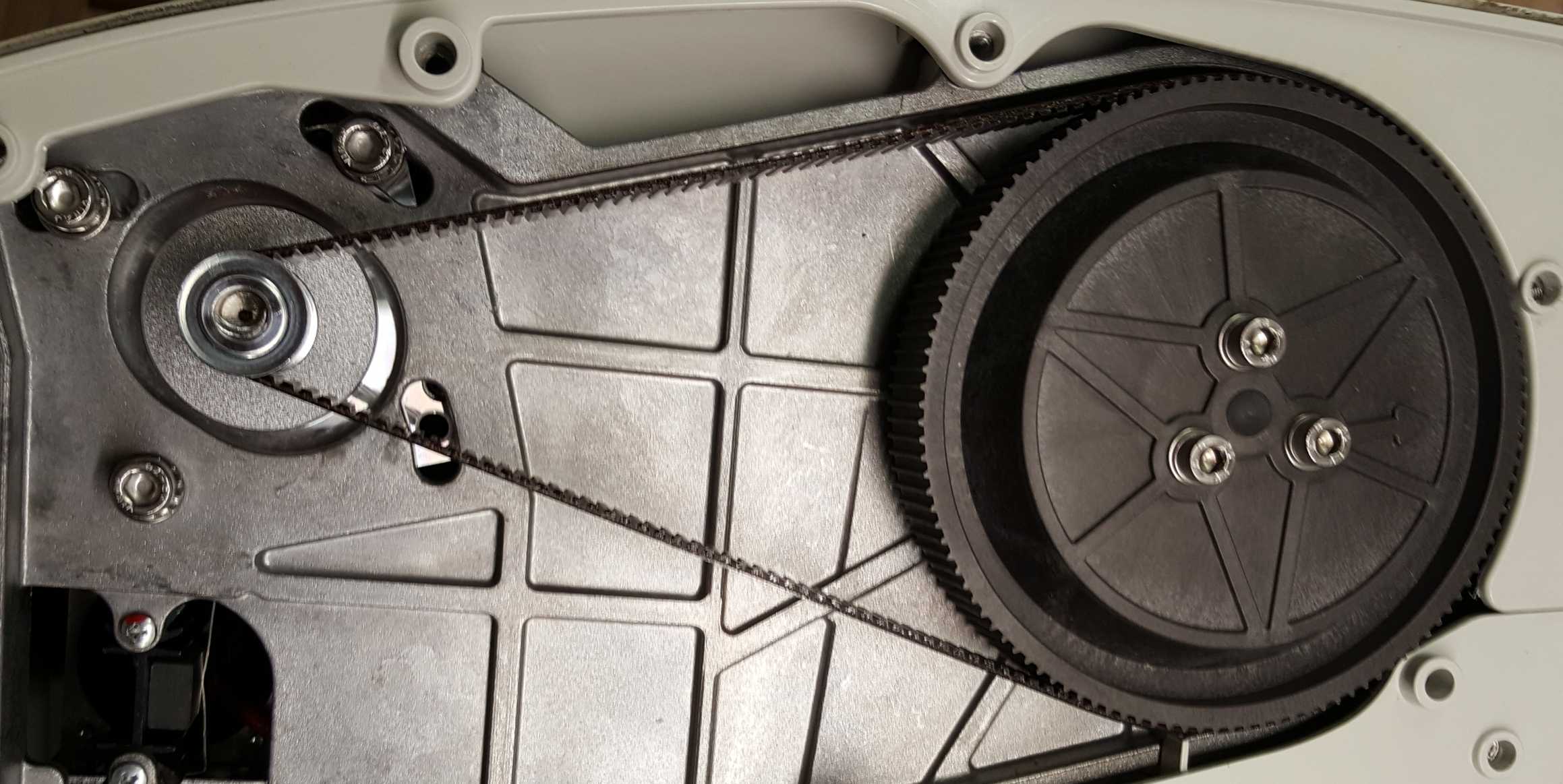
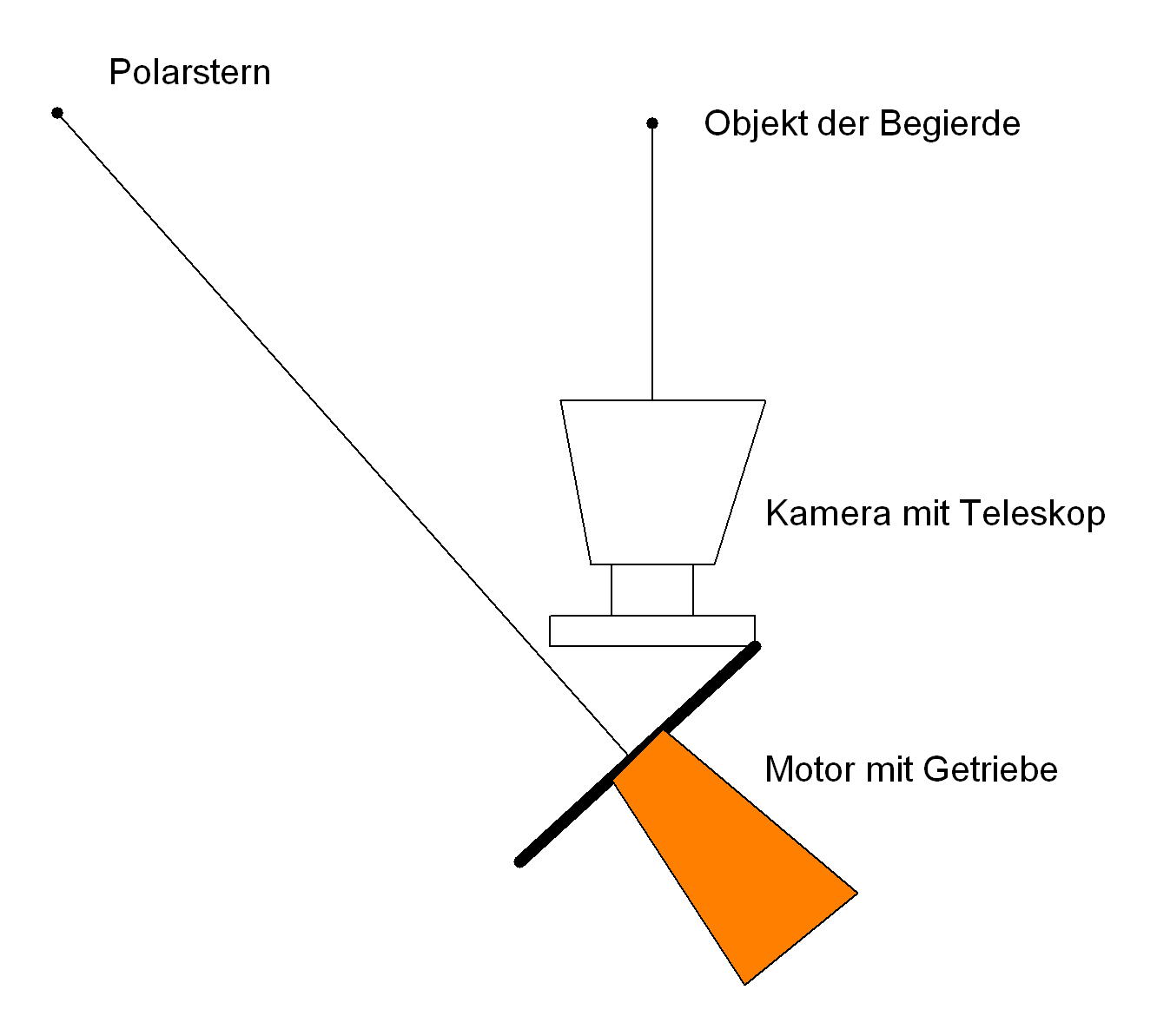
Achim S. schrieb: > Und wie implementierst du diese Spannungsquelle, die sowohl Strom > abgeben als auch aufnehmen kann? Ein Leistungs OPV übernimmt diese Aufgabe, wird auch etwas warm. > Wenn du das gelöst hast: was ist jetzt > an deiner Lösung noch einfacher oder besser als an den Standardlösungen, > die alle anderen verwenden? Leider habe ich z.B. ein TMC2130-Modul, was wesentlich besser ist, wurde hier mehrfach bestätigt, nicht einfach hier rumkullern. Der diskrete Aufbau soll nicht besser sein, sondern ganz einfach nur funktionieren. Zwei leistungsstarke Sinusgeneratoren, mehr braucht man theoretisch nicht für einen Schrittmotor. Für mich steht die Frage, ob der vorhandene Stepper und sein Zahnriemengetriebe so feinfühlig positioniert werden kann (s.Bild), oder ob es unlösbare Probleme mit der Mechanik gibt, dann müsste ich das Astro-Projekt verwerfen. Wäre auch kein Schaden, denn die 4.000 Euro teure und funktionstüchtige UC2PSSA000A Cam fand ich bei einem Spaziergang auf dem Sperrmüll. Beitrag "PELKO D Protokoll CAM-Steuerung Kamera Videotec UC2PSSA000A" Der Motor sollte mit einem 6V Akku betrieben werden. Achim S. schrieb: > Kein Problem: da der pFET verpolt ist wird die Schaltung ohnehin schnell > abrauchen. Oh, sorry, meine Schuld, verkeht gezeichnet. Gut aufgepasst. Lob! Achim S. schrieb: > Bei Schaltung 2 und 3 solltest du dich mit dem Temperaturgang > der Transistoren beschäftigen, sonst droht dir dort dasselbe. Sind nur Prinzipdarstellungen. Achim S. schrieb: > Wenn du etwas besseres entwickeln willst als die etablierten > Standard-Motortreiber, dann solltest du zumindest versuchen, deren > Funktion nachzuvollziehen. Es liegt nicht in meiner Absicht etwas besseres zu entwickeln. Vieleicht kann mal jemand etwas zu diesen Funktionen erklären, würde uns allen erfreuen.
Bernhard S. schrieb: > Leider habe ich z.B. ein TMC2130-Modul, was wesentlich besser ist, wurde > hier mehrfach bestätigt, nicht einfach hier rumkullern. Kann man doch kaufen, oder? Kostet nicht die Welt. Der TMC5160 mit externen MOSFETs kann auch höhere Ströme treiben als der TMC2130. Also ich bin der gleichen Meinung wie MaWin, auch wenn ich seine schroffe Art nicht verstehen kann. Die Vorteile eines existierender Lösungen hervorzuheben ginge sicher auch diplomatischer. Es kommt halt drauf an: Ist es ein Hobbyprojekt und geht es darum dabei was zu lernen, dann ist der diskrete Aufbau sicherlich verständlich, wenn auch sehr ambitioniert. Willst du dich aber um andere Dinge kümmern und nicht zu viel Zeit nur für die Ansteuerung eines Steppers verschwenden, dann greife auf vorhandene Chips von Trinamic, ST, TI, Toshiba oder was es halt so gibt zurück oder besorg dir gleich einen kompletten Schrittmotortreiber.
Hallo Bernhard und wieder ein sehr interessanter Beitrag von Dir, gefällt mir. Nur so als Vorschlag, das soll keine Kritik sein, teste die Variante4 mit 4xFET. Aber Vorsicht, "dann geht die Post" ab ! Bei 1Ohm Motortorwiderstand und 5V bist Du schnell bei 5A Spulenstrom, bei 2 Motoren schon 20 Ampere im ungünstigsten Fall. Die FETSs werden nicht warm, nur die Kabel und Leiterzüge. Ach noch was, einige hier kennen zwar die Bestellnummern von z.B. Mototreibern, wissen aber nicht, was und wie die Module funktionieren... traurig.
Angehängte Dateien:
-

Drehfeld_STEP.jpg
71 KB -

4xFET.png
10 KB -

Versuchsaufnau.jpg
80 KB -

Full_STEP.jpg
22 KB
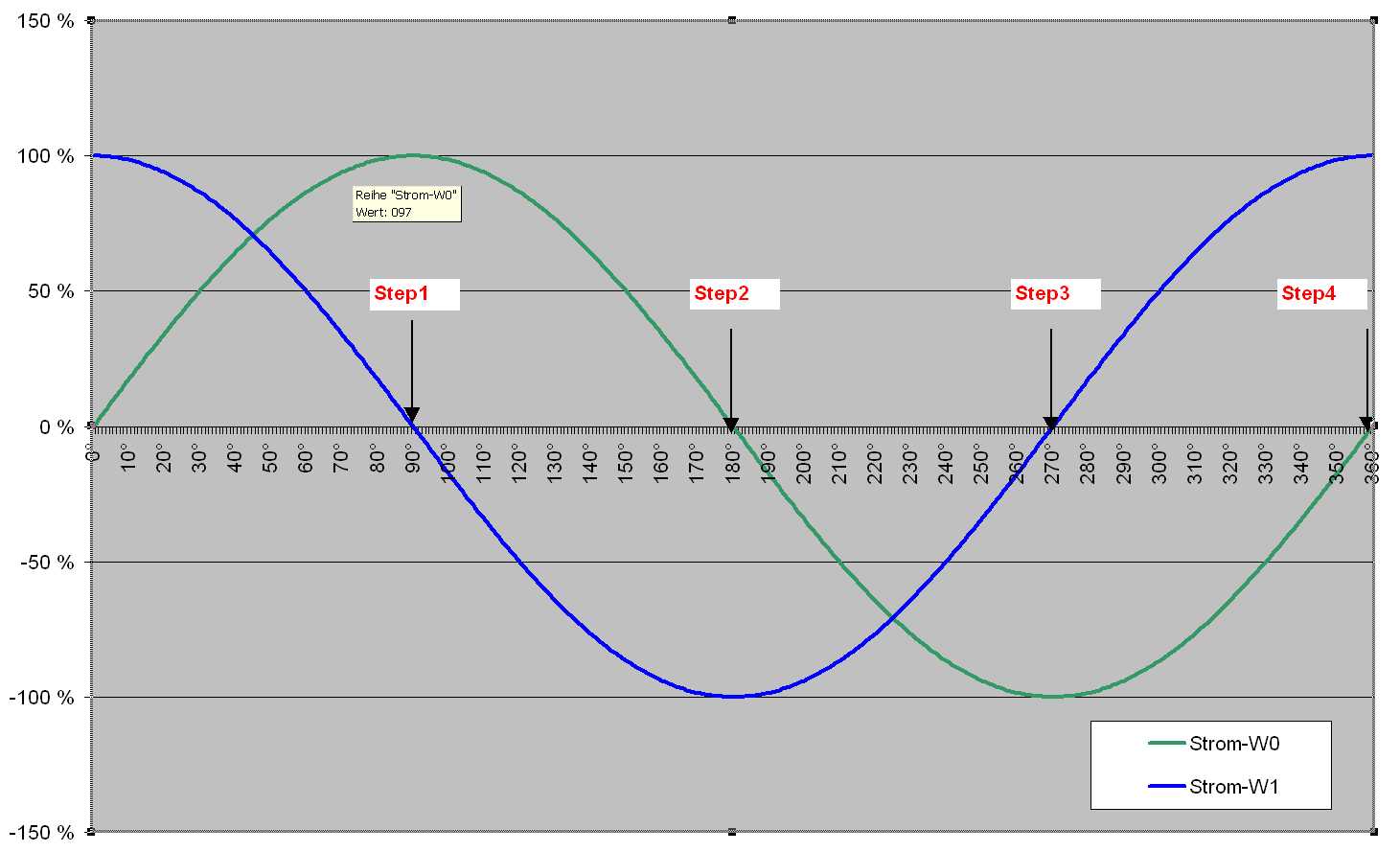
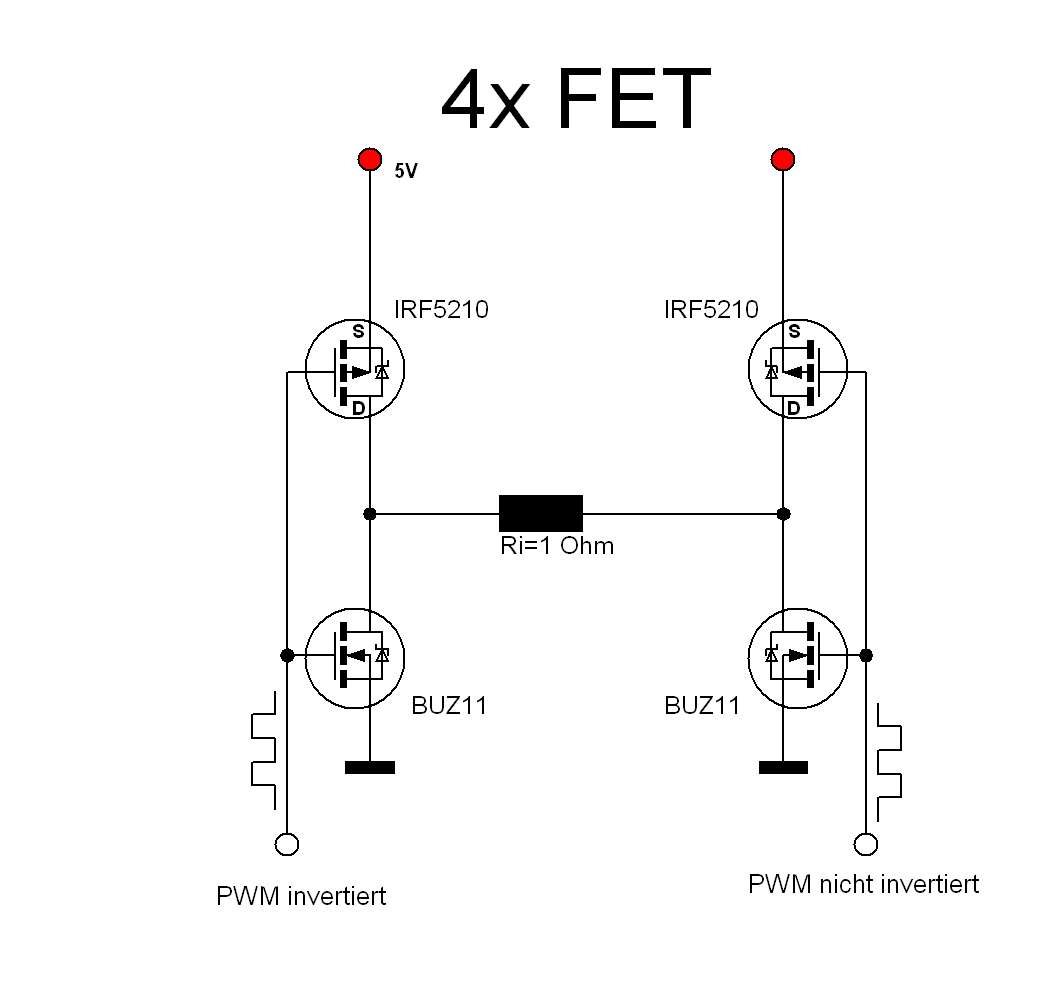
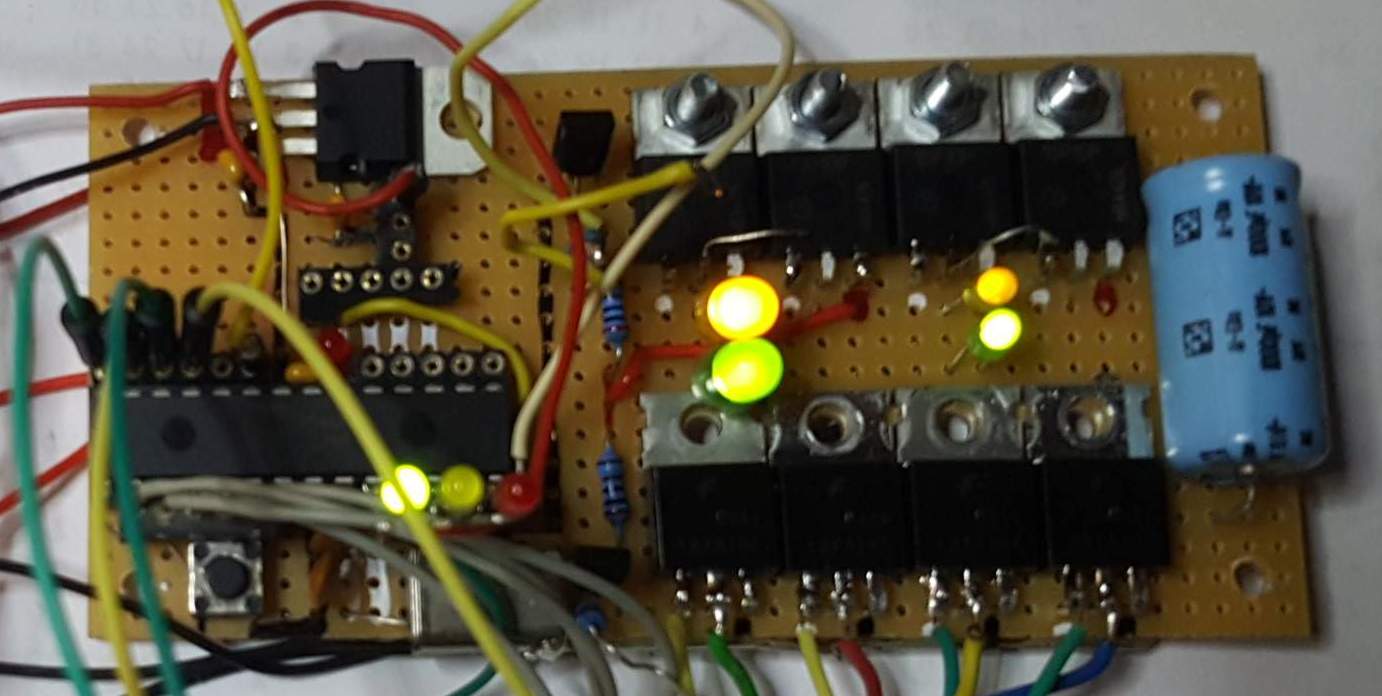
Egon D. schrieb: >>> Nein -- für vier Vollschritte, d.h. für einen >>> elektrischen Winkel von 360°. Ein Vollschritt >>> bezeichnet einen Kommutierungsvorgang, d.h. >>> elektrisch 90°. Egon, ich danke Dir, Du hast Recht, so ist es, hab's mal grafisch dargestellt, Drehfeld // Steps, meine allerersten Messungen an einem Schrittmotor haben es auch bestätigt. Bis jetzt war ich nur auf die Feinfühligkeit der Mikrosteps fixiert. Egon D. schrieb: > Eine PWM, die zwischen 0V und U_max hinundherschaltet, > ist ein Mischsignal aus einer (variablen) Gleichspannung > und einer Wechselspannung. > Der Gleichanteil wird von der Induktivität nicht > beeinflusst. Das stimmt, war ein Gedankenfehler von mir. Name schrieb: > teste die Variante4 mit 4xFET. Sehr guter Tipp, ist momentan meine bevorzugteste Variante, s. Versuchsaufbau.
Hallo Bernhard, ich habe vor vielen Jahren mit ähnlichen Schaltungen wie Du gebastelt. Nachdem die Schrittmotoren einfach nicht die benötigte Geschwindigkeit erreichten und manchmal Schritte verloren, habe ich das erstmal beiseite gelegt. Irgendwann habe ich mir aus China Treiber mit der Toshiba TB6600 bestellt(ca. 8€/Stück). Eingebaut war ein Nachfolger. Andere Hersteller sind sicherlich genau so gut. Da lassen sich die Ströme und Mikroschritte einstellen. Die brauchen einfach nur einen Takt und die Richtung und laufen super. Vielleicht hilft Dir das Datenblatt weiter. Mein Motor läuft im 1/8 – Schritt am ruhigsten. Gruß Carsten
Hallo Carsten, @alle Danke für die Empfehlung. Hast Du, habt Ihr mal die PWM am Ausgang mit einem Oszi genauer untersucht? Momentan arbeite ich mit 90 Mikroschritten pro Step für mein Astro-Projekt. D.h. bei 1,8 Grad pro Step, das sind 90 Mikroschritte pro Step, das wären dann 18.000 Mikrosteps pro 360 Grad Rotordrehung. Getriebe 120:17, ergibt 10,2 Winkelsekunden pro Mikrostep. Hinweis: Die scheinbare Sonnendurchmesser beträgt ca.31,5 Winkelminuten = 1.890 Winkelsekunden. Schafft der TB6600 sicherlich auch? Bernhard
Ein kleines Assemblereispiel: Beitrag "Schrittmotor Stepper Hybridschrittmotor Tester selber bauen Eigenbau ATmega8 Assembler"
Bernhard S. schrieb: > Schafft der TB6600 sicherlich auch? Hallo Bernhard, mein Oszi zeigt mir die volle Spannung von 24V. Ich nutze einen XY-Tisch aus Teilen einer alten Druckereimaschine. Die Lenze Motoren treiben über einen Zahnriemen eine Kugelumlaufspindel mit 0,5 cm/U. Also 200 Schritte*8Mikroschritte *2Umdrehungen *50cm = Zahlenbereich von 160000. Der TB6600 hat nur einen Zähler für die Mikroschritte. Die Positionierung muss der Atmega machen. Wenn Du die 1.8 Grad in 90 Mikroschritte unterteilst und einige Mikroschritte weiterfährst, wird der Motor sich nicht bewegen, da die Spannungsänderung viel zu klein ist. Probier es aus, vielleicht hast Du ja Glück. Wenn Du den Motor nur langsam bewegst, um nachzuführen, mag die Voll- oder Halbschrittsteuerung ausreichen. Soll er sich schnell drehen, um erstmal auf die Position eines Sternes zu kommen vielleicht nicht. Stell Dir das Ersatzschaltbild einer Wicklung vor. Es besteht aus der Reihenschaltung des reinen ohmschen Widerstandes und dem L. Steht der Motor, hast Du nur das R. - Taktest Du den Motor, kommt das L dazu. Je höher die Frequenz, je höher der induktive Widerstand L. Mit einem Sinussignal bekommst Du die meiste Leistung zum Motor. Andere Signalformen machen eben höhere Frequenzen. Für diese Behauptung bin ich vor kurzem in diesem Forum als „krank“ beschimpft worden. Glaube es, oder eben nicht. Eigentlich ist es ja egal, ob dir Motoren einen XY-Tisch oder Dein Astro-Projekt treiben. Ich kann Dir anbieten, meinen Treiber zuzumailen. Er läuft z.Zt. auf einem ATmega 1284P auf dem EV-Board von Pollin. Er treibt zwei Motore mit Rampe und einen Laser. Angesteuert wird er über die serielle Schnittstelle mit HPGL- Befehlen. Die kannst Du z.B. über HTerm o.ä. senden. Geschrieben habe ich ihn in Assembler mit dem Atmel Studio 6. Gruß Carsten
Angehängte Dateien:
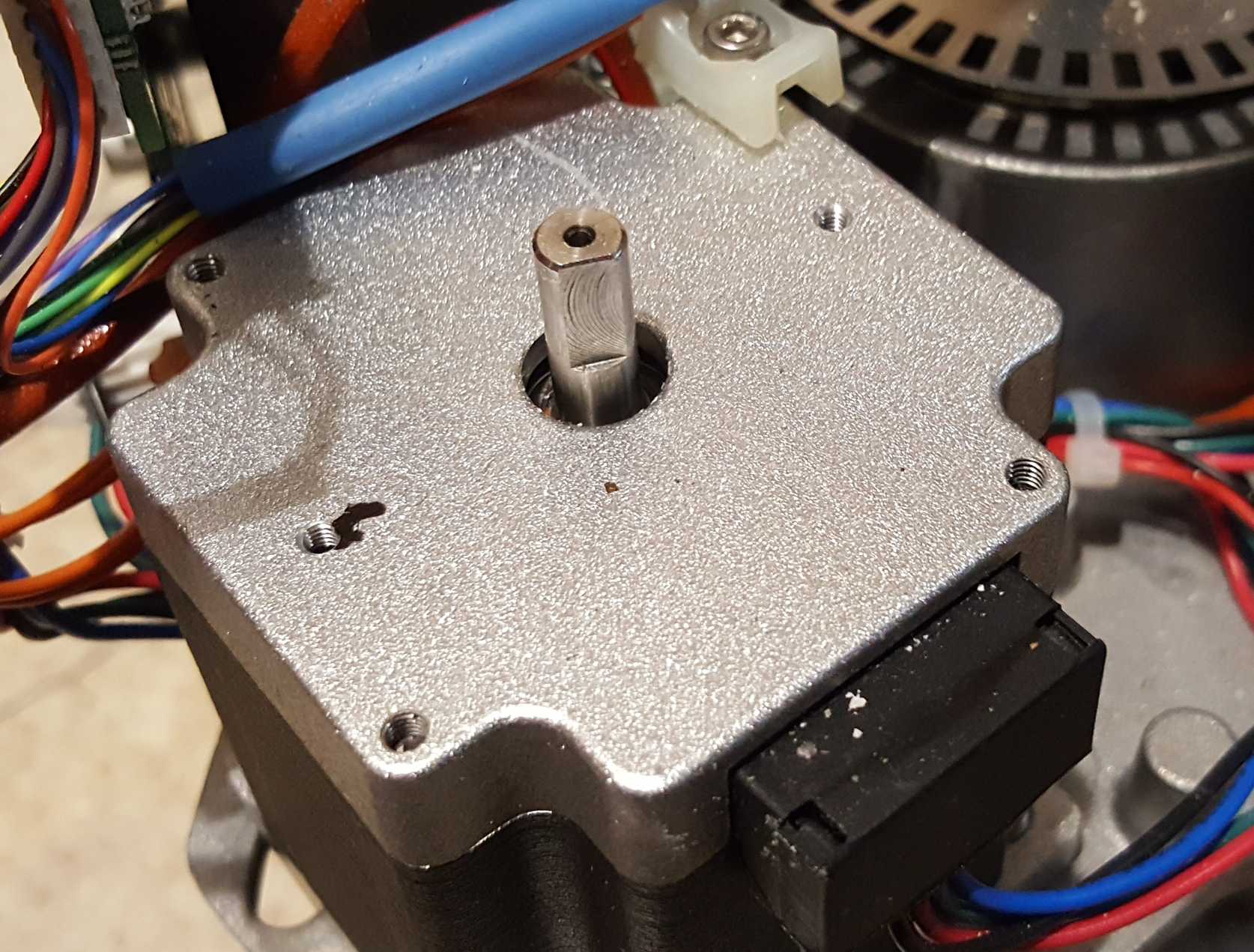
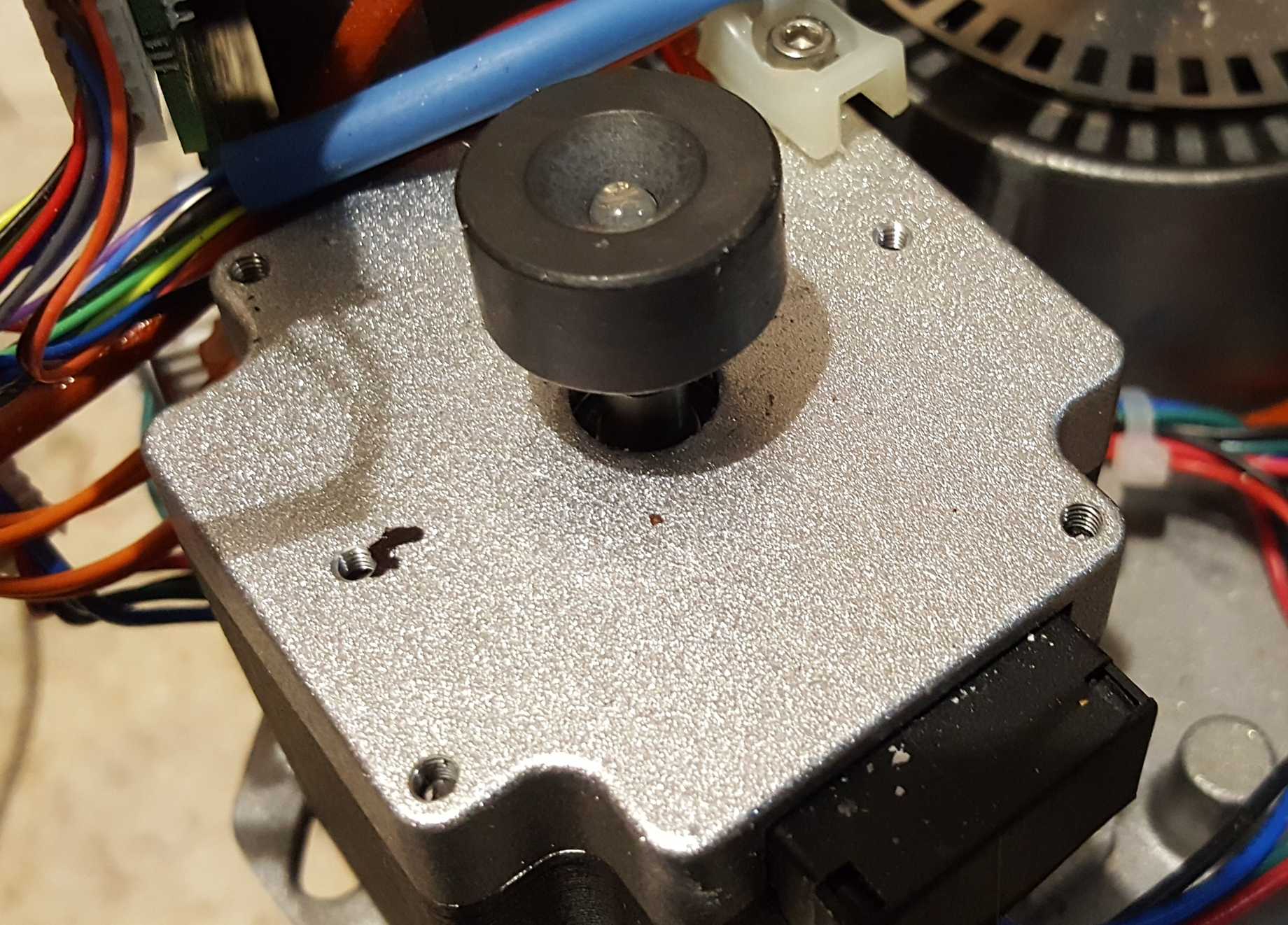

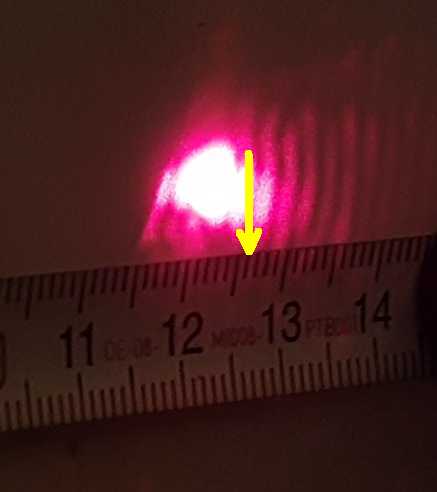
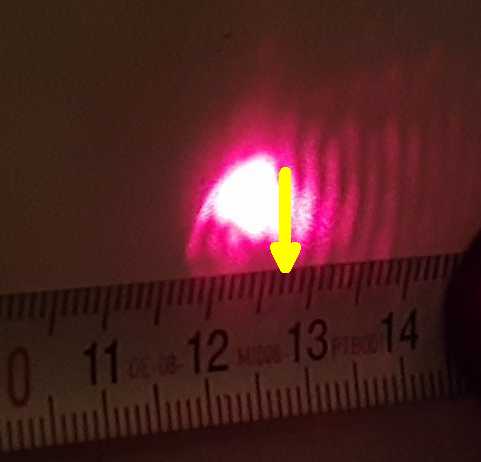
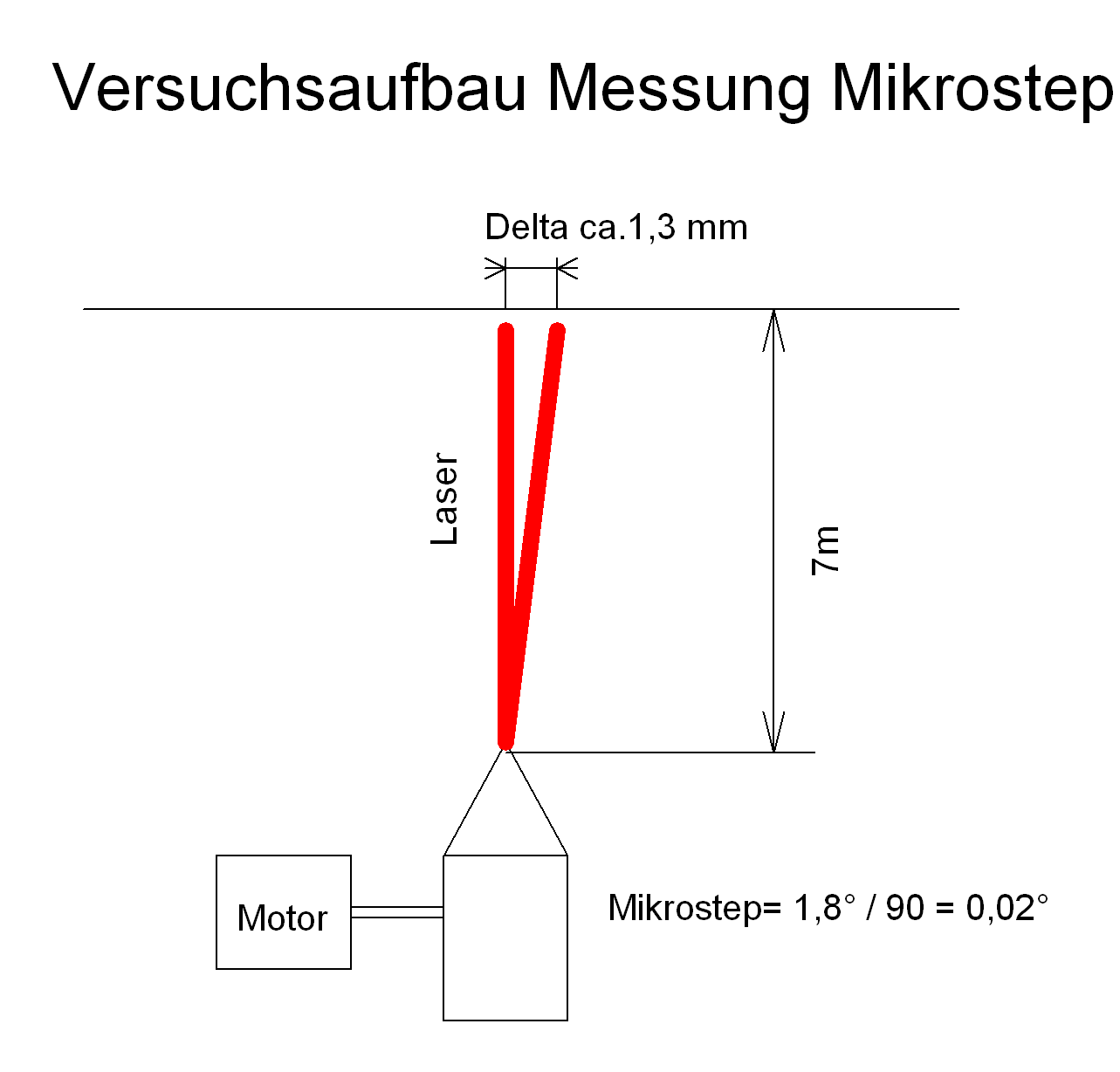
Hallo Carsten, Carsten-Peter C. schrieb: > Wenn Du die 1.8 Grad in 90 > Mikroschritte unterteilst und einige Mikroschritte weiterfährst, wird > der Motor sich nicht bewegen, da die Spannungsänderung viel zu klein > ist. Probier es aus, vielleicht hast Du ja Glück. Ich hatte Glück, zum Glück. Ein Versuch macht klug. Einen Laser montierte ich auf der Motorwelle, er projizierte einen Punkt auf der 7m entfernten Wand und alle 4 Sekunden bekam der Stepper einen neuen Mikroschritt verpasst. Ergebnis: der Stepper dreht kraftvoll den Rotor und das schwere Getriebe, überwand die Haftreibung, ohne einen Mikroschritt auszulassen. Hoffentlich reichen die 0,002833 Grad pro Mikrostep = 0,17 Winkelminuten am Getriebeausgang aus, denn die Kamera soll nicht zu schnell zum nächsten Mikrostep springen. Sollten weitre Mikroschritte pro Stepp gewünscht sein dann stößt die 8-Bit PWM so langsam an ihre Grenzen, ev. müsste man dann auf 9-Bit erweitern. > bin ich vor kurzem in diesem Forum als „krank“ > beschimpft worden. Glaube es, oder eben nicht. Bleib locker, ich werde als "extrem krank" deklariert, nur weil ich es nicht so umsetze, wie es 99% aller anderen Leute tun ^^ > Ich kann Dir anbieten, meinen Treiber zuzumailen. Das wäre schön, mich interessiert, wie Du die Problematik gelöst hast. Ich schreibe Dich mal privat an. > mein Oszi zeigt mir die volle Spannung von 24V Mir fällt gerade ein, daß ich hier eine CNC-Fräße herumkullern habe, geeignet für Oszi-Messungen. Bernhard
Egon D. schrieb: > Naja, beispielsweise bei einer Anwendung, die praktisch > überhaupt keine Anforderungen an die Dynamik des > Antriebes stellt -- wie eben z.B. eine Nachführung für > Astro-Aufnahmen. Wozu eine Stromregelung, wenn man ohnehin > nur genau eine Geschwindigkeit braucht? Weil bei einem Schrittmotor der Strom das Drehmoment und nicht die Geschwindigkeit bestimmt
Wolfgang schrieb: > Egon D. schrieb: >> Naja, beispielsweise bei einer Anwendung, die >> praktisch überhaupt keine Anforderungen an die >> Dynamik des Antriebes stellt -- wie eben z.B. >> eine Nachführung für Astro-Aufnahmen. Wozu eine >> Stromregelung, wenn man ohnehin nur genau eine >> Geschwindigkeit braucht? > > Weil bei einem Schrittmotor der Strom das Drehmoment > und nicht die Geschwindigkeit bestimmt Das ist zwar sachlich richtig, aber... 1. ...keine Besonderheit des Schrittmotors; bei anderen Motoren ist das genauso; 2. ...keine Begründung für die Notwendigkeit einer StromREGELUNG; für eine a priori bekannte und halbwegs konstante Drehzahl kann man auch mit konstanter, an die Drehzahl angepasster Spannung arbeiten (kennt man außerhalb des Schrittmotor- universums als U/f-Steuerung).
Bernhard S. schrieb: > Bleib locker, ich werde als "extrem krank" deklariert, > nur weil ich es nicht so umsetze, wie es 99% aller > anderen Leute tun ^^ Naja, entscheidend ist in meinen Augen nicht, ob Du es so machst, wie die meisten anderen es machen würden, sondern ob das, was Du machst, Sinn gibt. Für mich gibt es z.B. relativ wenig Sinn, dass Du eine Montierung mit einer Kamera, die man normalerweise im wohlverstandenen Eigeninteresse einigermaßen ausbalanciert, mit einem 3A-Schrittmotor antreibst, der geschätzt 100W leistet und ein Fräsportal bewegen könnte. Die 0.0007 U/min, die eine Nachführung erzeugen muss, gewinnt man normalerweise über ein Getriebe, gern mit Schnecke. Dann genügt als Antrieb auch ein Stepper aus einem alten Diskettenlaufwerk, und Mikroschritte sind nur aus Geräuschgründen nützlich, ihre Genauigkeit ist wurscht.
Egon D. schrieb: > 2. ...keine Begründung für die Notwendigkeit einer > StromREGELUNG; für eine a priori bekannte und > halbwegs konstante Drehzahl kann man auch mit > konstanter, an die Drehzahl angepasster Spannung > arbeiten (kennt man außerhalb des Schrittmotor- > universums als U/f-Steuerung). Warum willst du eine Größe Regeln, die gar nicht deine zu stabilisierende Größe ist. Gerade bei Astro-Aufnahmen brauchst du die Stromregelung, weil du einen hohen Dynamikbereich in der Schrittfrequenz benötigst. Einerseits braucht man die langsame Nachführung und andererseits hohe Schrittfrequenzen für zügiges Verfahren von Objekt zu Objekt, mal ganz abgesehen von Nachführung auf Satelliten (ISS), wo sich die Geschwindigkeit während eines Durchgangs SEHR dynamisch ändert. Egon D. schrieb: > Dann genügt als Antrieb auch ein Stepper aus > einem alten Diskettenlaufwerk, und Mikroschritte sind > nur aus Geräuschgründen nützlich, ihre Genauigkeit ist > wurscht. Geräusche sind Vibrationen und genau die möchte man bei Astro-Nachführung, zumindest bei größeren Brennweiten, nicht.
Angehängte Dateien:
-

Mechanik_Kamera.jpg
180 KB -

Saturn.jpg
2,2 KB

Egon D. schrieb: > ...was Du machst, Sinn gibt. > > Für mich gibt es z.B. relativ wenig Sinn, dass Du > eine Montierung mit einer Kamera, die man normalerweise > im wohlverstandenen Eigeninteresse einigermaßen > ausbalanciert, mit einem 3A-Schrittmotor antreibst, > der geschätzt 100W leistet und ein Fräsportal bewegen > könnte. Die gesamte zu bewegende Mechanik ist ziemlich schwer, robust aufgebaut, der Riemen des Zahnriemengetriebes ist straff gespannt, um das Getriebespiel klein zu halten. Die Mechanik ist massenmäßig nicht korrekt ausgewuchtet, etwas kopflastig und wenn die 3kg schwere "Russentonne" montiert ist, muss der Motor ein ordentliches Drrehmoment aufbringen können. Der Motor darf mit 2,8A bestromt werden, momentan mit 2A, bei 5V ergibt es 10 Watt. Ich achte schon darauf, daß Greta milde gestimmt wird. Wie kommst Du auf 100W? > Die 0.0007 U/min, die eine Nachführung erzeugen muss, > gewinnt man normalerweise über ein Getriebe, gern mit > Schnecke. Dann genügt als Antrieb auch ein Stepper aus > einem alten Diskettenlaufwerk, und Mikroschritte sind > nur aus Geräuschgründen nützlich, ihre Genauigkeit ist > wurscht. Ich stimme Dir zu, es ist nur ein Stepper und ein Getriebe mit einer Übersetzung von 7:1 verbaut, was soll ich tun?
Angehängte Dateien:
-

Stromverlauf.jpg
67 KB
Wolfgang schrieb: > ...brauchst du die Stromregelung Kann mir mal bitte jemand erklären, wozu man die Stromregelung benötigt? Ich stell mir das momentan so vor, soll sich der Stepper bewegen, dann wird mit 100% bestromt, hat er sein Ziel erreicht ist nur noch ein Haltestrom erforderlich und der Strom kann verringert werden. Beispiel, Rotor 45 Grad, Strom durch beide Wicklungen je 75%. nach kurzer Zeit aktiviert sich die Strombegrenzung und beie Wicklungen weren nun noch minimal mit 75/2% bestromt, indem die PWM halbiert wird. Die Stromverhältnisse und Kraftverhältnisse bleiben ja gleich.
Bernhard S. schrieb: > Kann mir mal bitte jemand erklären, wozu man die Stromregelung benötigt? Die Stromregelung dient dazu, dass beim schnelleren Drehen der gewünschte Strom durch den Motor noch erreicht wird (und damit das benötigte Drehmoment). Bei beliebig langsamer Schrittfolge spielt das keine Rolle. Da kannst du die Höhe des Stroms auch allein durch den ohmschen Widerstand und die Wahl der passenden Versorgungsspannung bestimmen. Aber wenn mit dieser Auslegung der Motor auch mal schneller drehen soll geht der Strom (und damit das Drehmoment) ohne Stromregelung in die Knie. Mit Stromregelung arbeitet man mit höherer Spannung, als aufgrund des ohmschen Widerstands bei niedrigen Drehzahlen eigentlich notwendig wäre. Würde man diese höhere Spannung ohne Stromregelung verwenden, dann wäre bei niedrigen Drehzahlen der Strom viel zu groß. Das wird verhindert, indem der Mittelwert der Motorspannung durch Variation des Tastgrads grade so eingestellt, dass der gewünschte Strom fließt. Mit dieser Kombination (hohe Spannung und Stromregelung) schafft man es, sowohl bei niedrigen als auch bei hohen Schrittfrequenzen den gewünschten Strom (und das Drehmoment) zu erreichen. Bei langsamen Schrittfrequenzen hat die Sache den Vorteil, dass in der Motorwicklung genau der gewünschte Strom dauerhaft fließt, aus der Quelle aber im zeitlichen Mittel nur ein wesentlich kleinerer Strom entnommen wird. Das hat noch nichts mit der Haltestromabsenkung zu tun, die du beschreibst. Die lässt sich aber natürlich mit einer Stromregelung noch zusätzlich realisieren. Dazu ist die Stromregelung sinnvoll. Ob sie benötigt wird hängt davon ab, wie stark die Schrittfrequenzen variiert werden sollen und welchen Drehmomentverlust man dabei in Kauf nehmen will.
Wolfgang schrieb: > Egon D. schrieb: >> 2. ...keine Begründung für die Notwendigkeit einer >> StromREGELUNG; für eine a priori bekannte und >> halbwegs konstante Drehzahl kann man auch mit >> konstanter, an die Drehzahl angepasster Spannung >> arbeiten (kennt man außerhalb des Schrittmotor- >> universums als U/f-Steuerung). > > Warum willst du eine Größe Regeln, Du wirst schockiert sein: Ich will gar nicht REGELN. STEUERN genügt vollauf. > die gar nicht deine zu stabilisierende Größe ist. Wie immer in der Technik: Weil diese andere Größe (die elektrische Spannung) LEICHTER zu manipulieren ist und es einen funktionalen Zusammenhang zwischen dieser und dem Strom gibt. > Gerade bei Astro-Aufnahmen brauchst du die Stromregelung, > weil du einen hohen Dynamikbereich in der Schrittfrequenz > benötigst. Naja. Man braucht die reguläre Nachführgeschwindigkeit und einen Eilgang. Okay. Ich sehe nicht, warum das mit U/f-Steuerung nicht funktionieren sollte. > Egon D. schrieb: >> Dann genügt als Antrieb auch ein Stepper aus >> einem alten Diskettenlaufwerk, und Mikroschritte sind >> nur aus Geräuschgründen nützlich, ihre Genauigkeit ist >> wurscht. > > Geräusche sind Vibrationen und genau die möchte man bei > Astro-Nachführung, zumindest bei größeren Brennweiten, > nicht. Richtig! Im Vergleich dazu plant Bernd fast eine Art Direktantrieb, bei dem die GENAUIGKEIT der Mikroschritte entscheidend ist. In meinen Augen ein schlechter Einfall.
Bernhard S. schrieb: > Die gesamte zu bewegende Mechanik ist ziemlich > schwer, robust aufgebaut, der Riemen des > Zahnriemengetriebes ist straff gespannt, um das > Getriebespiel klein zu halten. > > Die Mechanik ist massenmäßig nicht korrekt > ausgewuchtet, etwas kopflastig und wenn die 3kg > schwere "Russentonne" montiert ist, muss der > Motor ein ordentliches Drrehmoment aufbringen > können. Naja. Exakt für diesen Fall wurden Getriebe erfunden. Nachführungen an Astro-Montierungen verwenden m.W. häufig Schneckenradgetriebe; in Deinem Fall würde aber fast jede Art von Untersetzung eine Entspannung der Lage bringen. Schnecken haben noch den Vorteil der Selbsthemmung. Aber gut. Das ist Deine Sache. > Der Motor darf mit 2,8A bestromt werden, momentan > mit 2A, bei 5V ergibt es 10 Watt. Ich achte schon > darauf, daß Greta milde gestimmt wird. Es ging mir weniger um Greta als vielmehr um den mitzuführenden Bleiakku bzw. den notwendigen Netz- anschluss. > Wie kommst Du auf 100W? Geschätzt. Motoren dieser Größe liefern über zwei Fäuste 1Nm oder etwas mehr; bei hoher Drehzahl bleibt davon vielleicht 0.5Nm übrig. 20 U/s sind 4000 Vollschritte je Sekunde; das ist mit einer Stromchopperstufe bei z.B. 48V Betriebsspannung i.d.R. noch machbar.
1 | |
2 | P = M * Omega = M * 2pi * n = 0.5Nm * 6.3 * 20s^-1 = 63W. |
Das ist das, was der Motor bei passender Ansteuerung leisten KANN . >> Die 0.0007 U/min, die eine Nachführung erzeugen muss, >> gewinnt man normalerweise über ein Getriebe, gern mit >> Schnecke. Dann genügt als Antrieb auch ein Stepper aus >> einem alten Diskettenlaufwerk, und Mikroschritte sind >> nur aus Geräuschgründen nützlich, ihre Genauigkeit ist >> wurscht. > > Ich stimme Dir zu, es ist nur ein Stepper und ein > Getriebe mit einer Übersetzung von 7:1 verbaut, was > soll ich tun? Ich verstehe Dein Problem: Der Aufbau ist so, wie er ist, mechanisch fertig und funktioniert. Zum einen könnten man schauen, ob man ein Gegengewicht anbringen kann. Das machen übliche Montierungen ja auch nicht anders. Damit reduzieren sich schonmal die Anforderungen an das Haltemoment des Motors. Zum anderen würde ich wahrscheinlich versuchen, irgend eine Art von Getriebe an der Stelle unterzubringen, wo jetzt der Motor ist. Da kann man schlecht raten; ich kenne ja Deine Möglichkeiten nicht. Bei Pollin gibt es manchmal Schrittmotoren mit angebautem Getriebe; vielleicht ist da etwas passendes dabei. Im schlimmsten Fall hilft vermutlich schon eine zweite Stufe mit Zahnriemen.
Bernhard S. schrieb: > Wolfgang schrieb: >> ...brauchst du die Stromregelung > > Kann mir mal bitte jemand erklären, wozu man die > Stromregelung benötigt? 1. Um vernünftiges Drehmoment bei hohen Drehzahlen zu erreichen. 2. Für die Sinuskommutierung ("Mikroschrittbetrieb"). > Ich stell mir das momentan so vor, soll sich der > Stepper bewegen, Schlechte Vorstellung. Man sollte davon ausgehen, dass sich der Läufer IMMER bewegt -- nur eben mehr oder weniger schnell. > dann wird mit 100% bestromt, hat er sein Ziel > erreicht ist nur noch ein Haltestrom erforderlich > und der Strom kann verringert werden. Das gilt nur im Quasi-Stillstand -- so wie er bei Deiner Nachführung vorliegt. Bei "echter" Bewegung (CNC-Fräse) verhindern die Wicklungsinduktivität und die durch die Drehung erzeugte Gegenspannung im Motor, dass sich bei Nennspannung auch Nennstrom aufbaut. Folge: Der Motor hat zuwenig Drehmoment und verliert Schritte. Den Rest hat Achim schon erklärt.
Angehängte Dateien:
-

Aufbau.png
12 KB
Hab mir mal etwas erlaubt, mit Verlaub: PWM von 8-Bit auf 10-Bit erhöht, eine 10-Bit Sinustabelle mit 0.5 Grad Schritten hinterlegt, nun stehen 180 Mikrosteps pro Vollschritt zur Verfügung. Die PWM wird nicht direkt mit den Tabelenwerten angesteuert, sondern es erfolgt ein Vergleich zwischen der Ist-PWM und der Soll-PWM, dabei wird die IST-PWM in kleinen Stufen mit 20ms Zeitverzug angepasst (Sanft-PWM), wollen wir doch den Motor etwas Zeit geben. Für eine Motordrehung konnte ich ohne Sanft-PWM 3s messen, mit Sanft-PWM 24s. Startet das Programm haben alle PWM den gleichen Wert, alle Wicklungen sind stromlos. ganz langsam werden die PWM so angepasst, dauert ca. 1s, so dass der Motor seine Startpositon anfahren kann. Endlich ist kein Knallen beim Programmstart mehr zu hören, nur bei einem Reset, oder Unterbrechen der Beriebsspannung. Der Motor muss ca. alle 300ms ein Mikroschritt ausführen, ergibt sich aus der der Getriebeübersetzung, Mikrostepps pro Vollschritt 86.400s pro Tag, 360° usw. Es ist richtig unheimlich, bei 15kHz PWM-Frequenz hört man nur ab und an ein leichtes Pfeifen, die Ursache liegt an einem Timer, der die Phasenumkehrschaltung für die Brücken ersetzt, er müsste scheller sein, ist er zu schnell dann bleit keine Rechenzeit mehr übrig. Der Motor ruckelt kaum noch, beim Getriebe ist ein rückeln nicht mehr nachweisbar, siehe Lasermesung: Bernhard S. schrieb: zur Lasermessung Egon D. schrieb: > Bei Pollin gibt es manchmal Schrittmotoren mit angebautem Getriebe Danke für den Tipp, werde mal einen Bestellen :-) https://www.pollin.de/p/joy-it-schrittmotor-mit-getriebe-5-1-nema17-05gm-1-80-motor-2-phasen-2-8-v-1-68-nm-310803 Schade, er hat nur eine Übersetzung von 5:1
Ein kleines praktisches Beispiel: Beitrag "Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATmega8"
L298N Modul von Conrad Schaltung / Schaltplan Beitrag "L298N Schaltung Schaltplan Modul Conrad MAKERFACTORY Schrittmotor-Treiber-Modul MF-6402405"
Das Conrad-Modul ist aus vielen Gründen unbrauchbar: - Uralte bipolare Motorbrücke mit sehr hohen Verlusten - Keine Stromregelung, nichtmal Sense-Widerstände bestückt - Damit auch kein Mikroschritt möglich Ohne C1 wird das Teil übrigens schnell Rauchzeichen von sich geben. Sobald es zu Rückspeisung aus dem Motor kommt steigt die Versorgungsspannung stark an. Mit freundlichen Grüßen Thorsten Ostermann
Bernhard S. schrieb: > L298N Modul von Conrad Schaltung / Schaltplan Oben lehnst du die gut funktionierende TB6600 Steuerung ab weil du selber etwas diskret entwickeln willst. Und dann ziehst du diese völlig veraltete L298-Platine aus dem Hut. Wie soll es denn nun weitergehen?
Thorsten O. schrieb: > - Keine Stromregelung, nichtmal Sense-Widerstände > bestückt > - Damit auch kein Mikroschritt möglich Man MUSS nicht zwingend stromgeregelt arbeiten (auch wenn das in den meisten Fällen sinnvoll ist). Quasistatisch stellt sich bei Nennspannung auch Nennstrom ein; eine PWM der Spannung tut es also. Bernhard macht offenbar genau das.
Thomas F. schrieb: > Bernhard S. schrieb: >> L298N Modul von Conrad Schaltung / Schaltplan > > Oben lehnst du die gut funktionierende TB6600 Steuerung > ab weil du selber etwas diskret entwickeln willst. Genau das ist die Definition von "Hobby": Etwas machen, weil einem dieses "Machen" Freude bereitet.
Egon D. schrieb: > Thomas F. schrieb: >>> L298N Modul von Conrad Schaltung / Schaltplan >> Oben lehnst du die gut funktionierende TB6600 Steuerung >> ab weil du selber etwas diskret entwickeln willst. > Genau das ist die Definition von "Hobby": Etwas machen, > weil einem dieses "Machen" Freude bereitet. Das "Freude Machen" ist dann also bei Conrad eine veraltete L298-Platine zu bestellen anstelle einer TB6600?
Thomas F. schrieb: >> Genau das ist die Definition von "Hobby": Etwas >> machen, weil einem dieses "Machen" Freude bereitet. > > Das "Freude Machen" ist dann also bei Conrad eine > veraltete L298-Platine zu bestellen anstelle einer > TB6600? Nein -- nicht das Bestellen, sondern das Verwenden, Verstehen, gegebenenfalls sogar Beherrschen.
Thomas F. schrieb: > Oben lehnst du die gut funktionierende TB6600 Steuerung ab An welcher Stelle wird diese Empfehlung abelehnt? Ein Beispiel würde vollkommen genügen^^
Wie wär´s mit TMC5160. Da gibts fertige Module bis 35V/3A. Oder alternativ einen China Servo, der läuft schon sehr ruhig und kostet nicht die Welt. Motor und Elektronic zusammen.
Egon D. schrieb: > Nein -- nicht das Bestellen, sondern das Verwenden, > Verstehen, gegebenenfalls sogar Beherrschen. Ganz nebenbei, der nostalgische L298 könnte man auch als D-Verstärker nutzen, bei 5V Betriebsspannung und 4Ohm Last und maximaler Lautstärke lässt der Nachbar nicht lange auf sich warten :-) Beitrag "D-Verstärker AVR ATmega8 Assembler"
Angehängte Dateien:
-

G_4xFET.png
13 KB
Carsten-Peter C. schrieb: > Wenn Du die 1.8 Grad in 90 > Mikroschritte unterteilst und einige Mikroschritte weiterfährst, wird > der Motor sich nicht bewegen, da die Spannungsänderung viel zu klein > ist. Probier es aus, vielleicht hast Du ja Glück. Selbst bei 180 Mikroschritten pro 1,8 Grad ist eine exakte und nachvollziehbare Motordrehung mit einem Laser nachweisbar. Ich staune selber über das Ergebnis. Momentan ist diese einfache, unkomplizierte und robuste Schaltung für meinen konkreten Anwendungsfall gut geeignet. Betriebsspannung: 4V...6V Mikrosteps pro 1,8°: 180 PWM des µC: 10Bit Kosten: ca. 4Euro
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.