Seltsam, ich kann es mir nicht erklären, laut Datenblatt benötigt dieser Schrittmotor 1000 Schritte pro eine Umdrehung der Getriebewelle. Gemessen habe ich immer 1036, egal welche Drehrichtung, egal welche Drehgeschwindigkeit, mit viel und wenig Motorstrom. Der Sepper läuft ganz langsam und ruhig, mit einer 10Bit-PWM angesteuert, mit ca 20s pro Umdrehung. Bei einem Vergleichsmotor stimmte alles: Beitrag "Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATmega8" Stimmt das Datenblatt nicht? Kennt jemand den Aufbau des Getriebes?
Angehängte Dateien:
-

Motor_mit_Laser.jpg
100 KB
Bernhard S. schrieb: > Gemessen habe ich immer 1036, egal welche Drehrichtung, > egal welche Drehgeschwindigkeit, mit viel und wenig Motorstrom. Bist du sicher? 200 Schritte pro Umdrehung ist ein gängiger Wert. Und ein Getriebe mit einem Übersetzungsverhältnis von 50:259 kann ich mir gerade schlecht vorstellen, einen Schrittmotor mit 207,2 Schritten pro Umdrehung allerdings noch viel weniger.
Beim hin und her drehen kann das auch Getriebespiel sein. Schau mal wie das bei 100 runden in eine Richtung ist.
oszi40 schrieb: > Lieferant? Pollin? ja Wolfgang schrieb: > Übersetzungsverhältnis von 50:259 kann ich mir gerade schlecht > vorstellen, einen Schrittmotor mit 207,2 Schritten pro Umdrehung > allerdings noch viel weniger. ich mir auch nicht :( Einer schrieb: > Beim hin und her drehen kann das auch Getriebespiel sein. Getriebespiel nicht nachweisbar, da ruckelt und klappert nichts > Schau mal wie das bei 100 runden in eine Richtung ist. Das ist eine gute Idee, ich probiers aus :-)
Einer schrieb: > Schau mal wie das bei 100 runden in eine Richtung ist. 100-erte Runden im VOllschritt, Halbschritt, mit ohne PWM. immer das gleiche Ergebnis: 1036 Stepps pro Runde
Das Getriebe ist ein einstufiges Planetengetriebe. Die standardmäßige Konfiguration in der vorhandenen Bauform ist: Antrieb am Sonnenrad (Ritzel auf der Motorwelle), Abtrieb am Steg (trägt die Planetenräder), Hohlrad ist fest (ist Teil des Gehäuses). Übersetzungsverhältnis über die Zähnezahlen: 1+z_Hohlrad/z_Sonnenrad Ist das Hohlrad nicht zum zählen der Zähne zugänglich kann dessen Zähnezahl auch aus den Zähnezahlen des Sonnenrades und der Planetenräder berechnet werden: z_Hohlrad=z_Sonnenrad+2*z_Planetenrad zu den Übersetzungsverhältnissen von Planetengetrieben siehe auch hier: https://www.tec-science.com/de/getriebe-technik/planetengetriebe/grundgleichung-der-umlaufgetriebe-willis-gleichung/ ein Rechner zu den Zähnezahlen und den resultierenden Übersetzungsverhältnissen siehe hier: https://www.torcbrain.de/uebersetzungsrechner-planetengetriebe/ wenn noch Garantie: Motor zurücksenden wenn keine Garantie mehr: Getriebe abschrauben, Motor auf 200 Schritte je Umdrehung prüfen, Getriebe auf 5:1 und auf leichten gleichmäßigen Lauf prüfen (es darf an keiner Stelle haken, klemmen, kratzen ...), Zähne zählen und Übersetzung kontrollieren, festen Sitz des Sonnenrades auf der Motorwelle prüfen, festen Sitz des Hohlrades im Gehäuse prüfen...
Nimm mal eine kommerziell erhältliche Steuerung und mach den Test nochmal. Ich gehe stark davon aus, dass das Problem in deiner Steuerung liegt. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Nimm mal eine kommerziell erhältliche Steuerung und mach den Test > nochmal. Ich gehe stark davon aus, dass das Problem in deiner Steuerung > liegt. Würde ich auch vermuten. Das Teil scheint recht verbreitet zu sein, es wird beileibe nicht nur bei Pollin vertickt, sondern bei praktisch allen üblichen Verdächtigen. Und es ist ja nun auch nicht gerade ein ausgesprochenes Schnäppchen... Und selbst, wenn man mal als Hypothese postuliert, dass es ein China Fake wäre: warum sollten sich die Chinesen die Mühe machen, ein derart aufwendig herzustellenden Schrittwinkel zu implementieren, statt einfach die Vorlage nachzubauen? Nein, das ergibt absolut keinen Sinn. Nö, das dürfte ein Bug irgendwo in Bernhards Software sein.
Angehängte Dateien:
-

Motor_ohne_Getriebe_mit_Zeiger.jpg
47 KB -

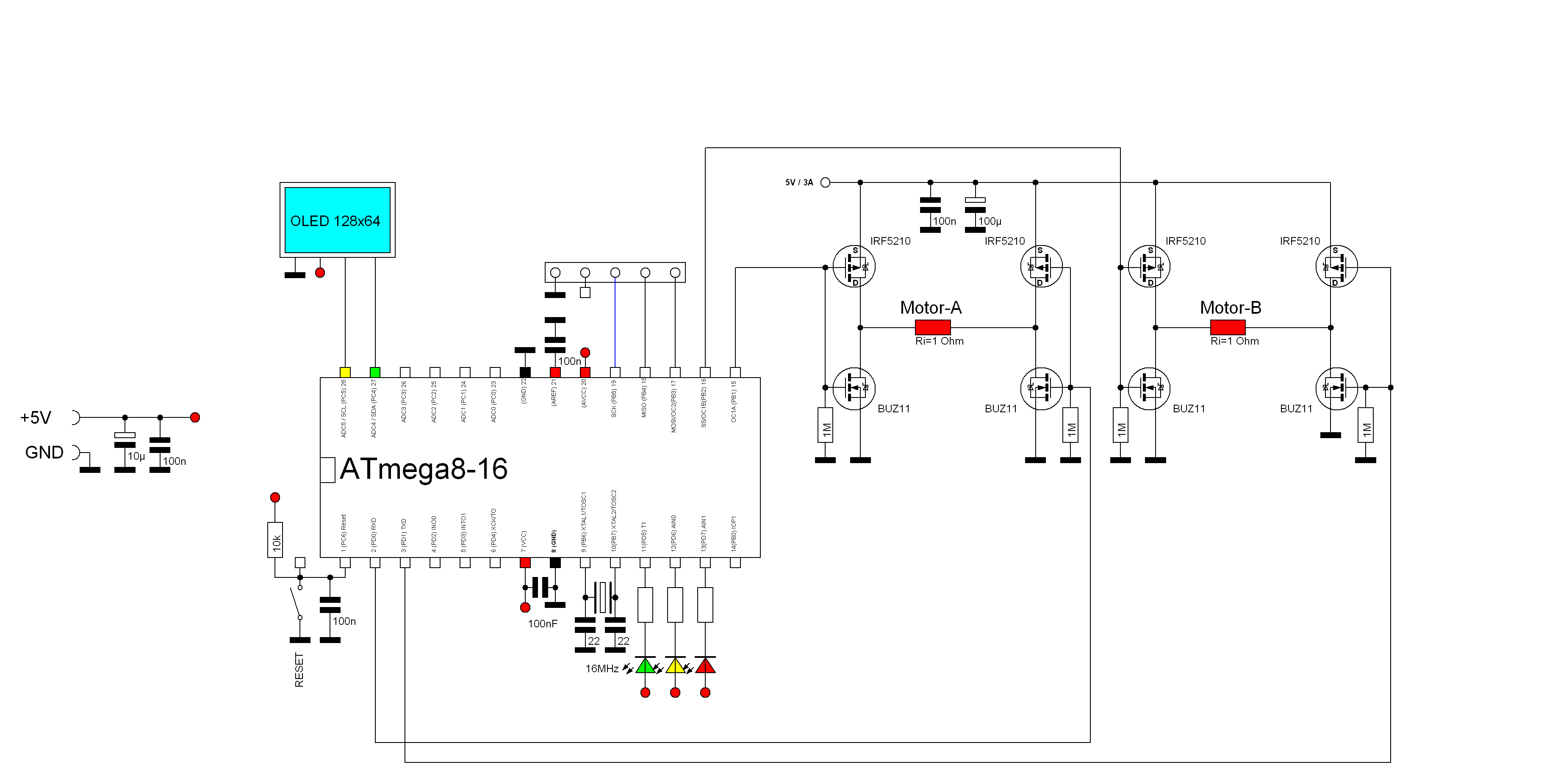
Schaltung.png
44 KB -

Sonnenrad.jpg
38 KB -

Getriebe.jpg
79 KB -

Interieur.jpg
95 KB
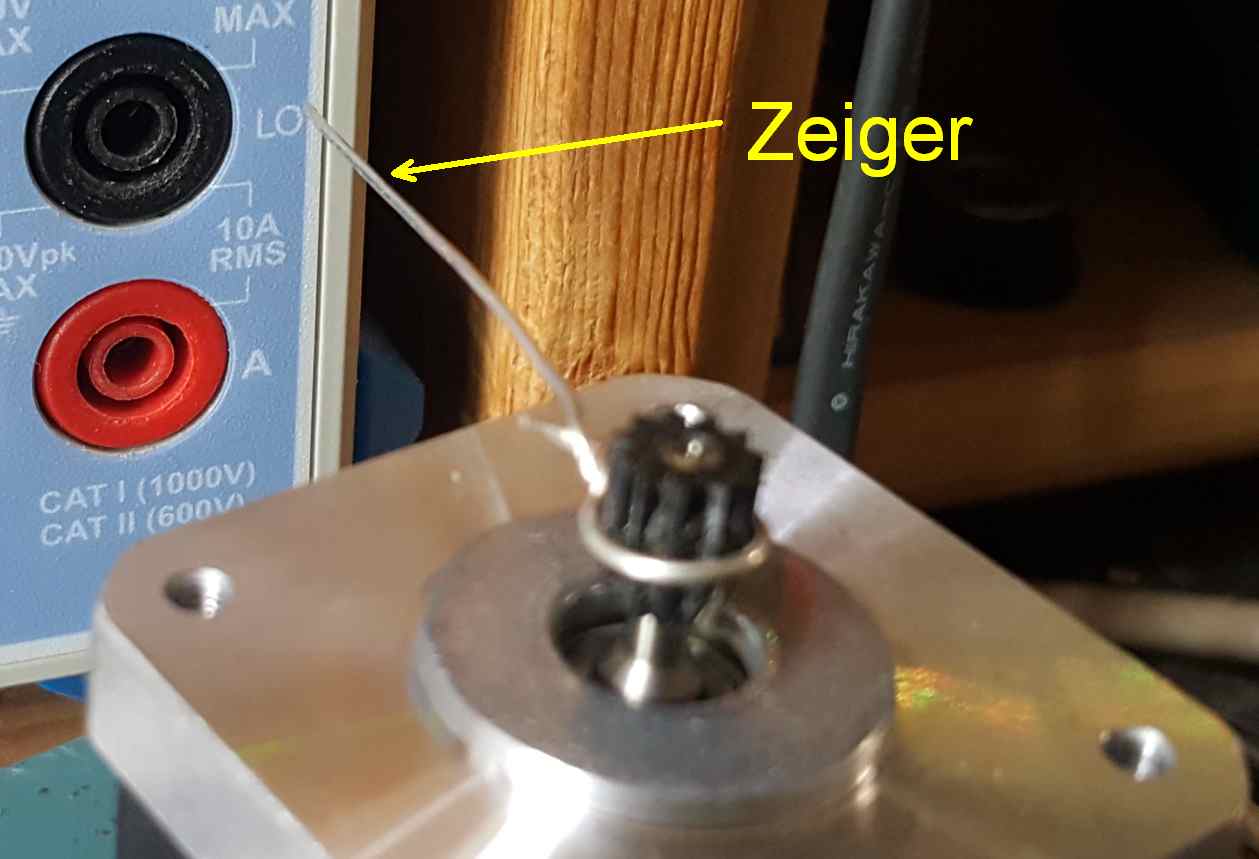

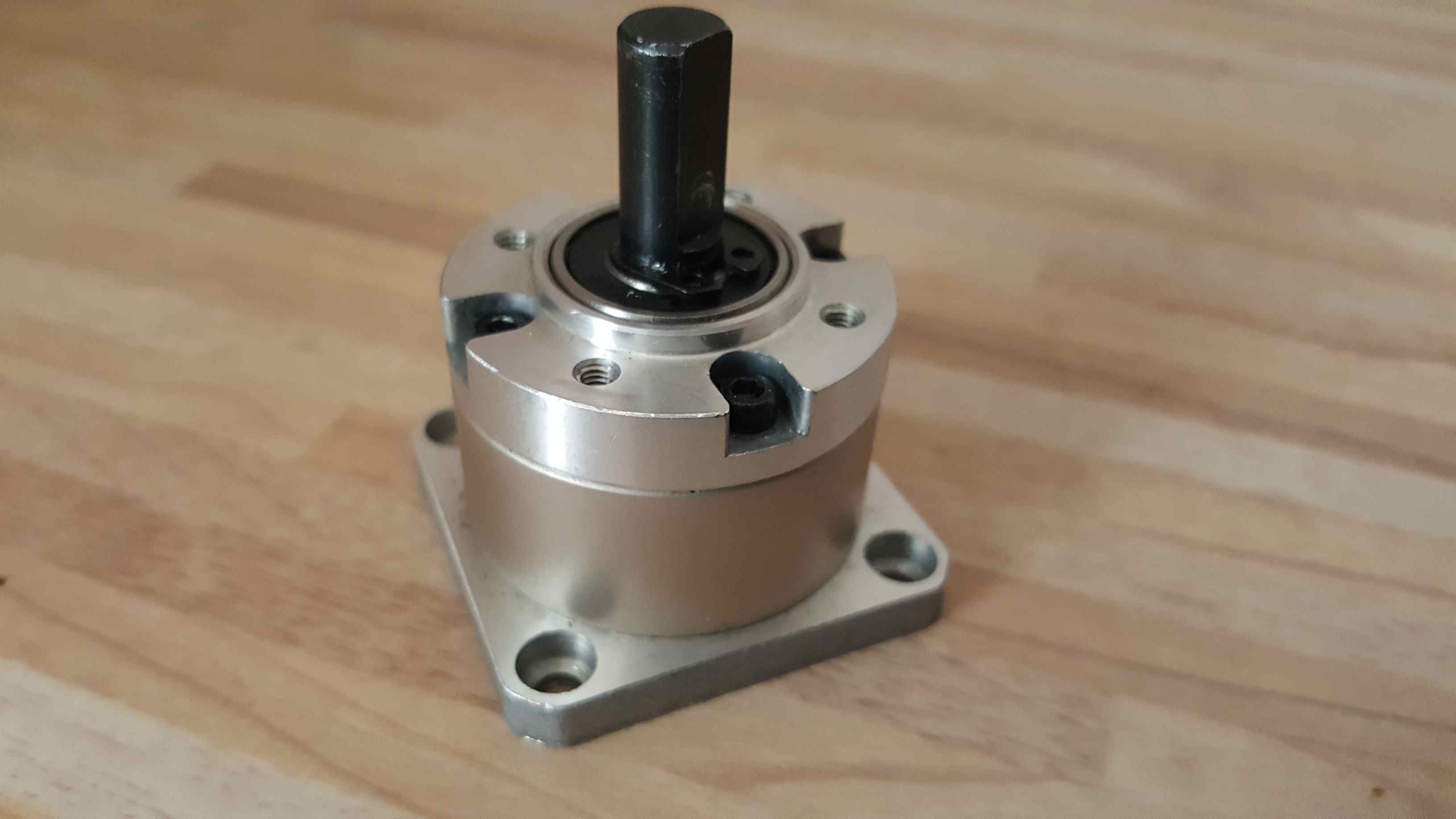

Mario P. schrieb: > Getriebe abschrauben, Motor auf 200 Schritte je Umdrehung prüfen Ergebnis: Der Motor benötigt exakt 200 Steps für eine Motordrehung, nach 100-erten Umdrehungen trifft er immer wieder seine Startposition. Leider! Mir wäre ein Software-Bug wesentlich lieber gewesen, auch an der einfachen Schaltung liegt es bestimmt nicht. Das Sonnenrad besitzt 11 Zähne (s.Bild) Leider konnte ich das Getriebe nicht weiter demontieren, irgend jemand hat mein 1mm Imbus verschleppt^^ @alle die Ursache ist zwar noch nicht gefunden, aber Eure Hinweise waren sehr brauchbar, danke.
Bernhard S. schrieb: > Leider! Mir wäre ein Software-Bug wesentlich lieber gewesen, auch an der > einfachen Schaltung liegt es bestimmt nicht. Ich würde mal mutmaßen, dass es genau an dieser Schaltung liegt. Die Momentenanforderung mit Getriebe dürfte wesentlich höher sein als wenn der Motor ohne Getriebe dreht. Kannst du Schrittverluste ausschließen? Mir sieht die H-Brücke etwas sagen wir "unterkomplex" und eher nach einem Prinzipschaltbild als nach einer Schaltung aus der Praxis aus.
Wolfgang schrieb: > Bernhard S. schrieb: >> Gemessen habe ich immer 1036, egal welche Drehrichtung, >> egal welche Drehgeschwindigkeit, mit viel und wenig Motorstrom. > > Bist du sicher? > 200 Schritte pro Umdrehung ist ein gängiger Wert. Und ein Getriebe mit > einem Übersetzungsverhältnis von 50:259 kann ich mir gerade schlecht > ... Warum nicht? Gerade bei einem Planetengetriebe ist das Größenverhältnis zwischen Sonnen- und Planetenrädern groß. Ich hab hier ein handelsübliches Stirngetriebe mit 79,1:1...
1036 passt vollkommen. Das "5:1" Getriebe hat eine real 5.18: 1 s.z.b. https://www.ebay.de/itm/5-1-Planetary-Gearbox-Nema-17-Stepper-Motor-1-68A-38mm-DIY-CNC-Robot-Camera/392172199853
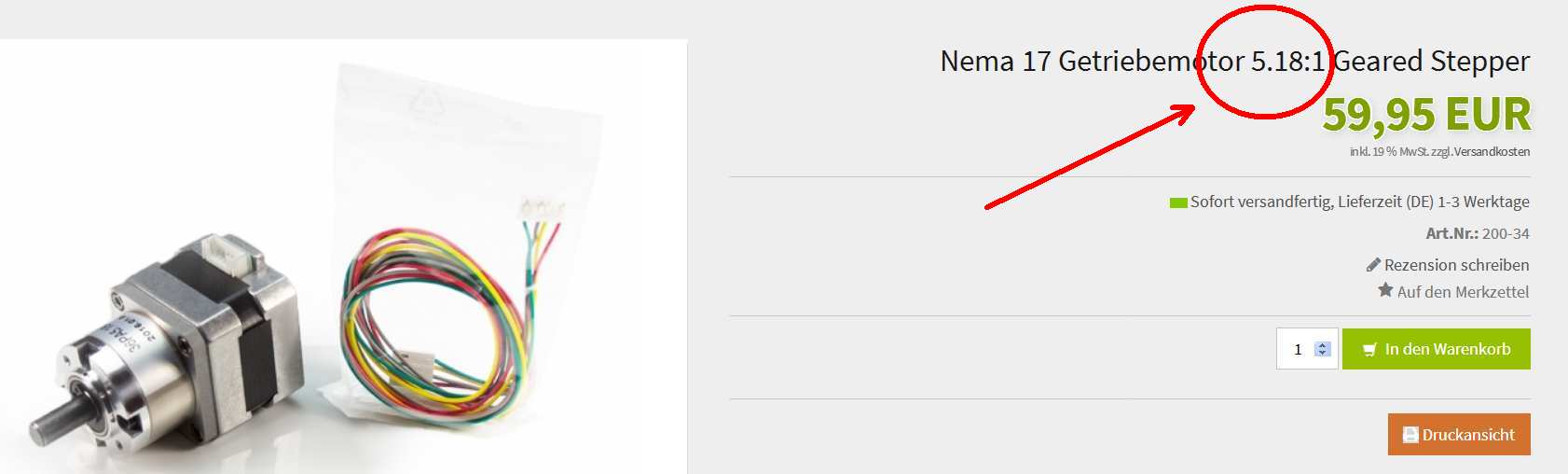
Gelber Sack schrieb: > 1036 passt vollkommen. > Das "5:1" Getriebe hat eine real 5.18: 1 Danke, das Geheimnis ist gelüfet, Super !!! https://www.3dprinterstore24.de/3D-Drucker-Bauteile/Antrieb/Nema-17-Getriebemotor-5-18-1-Geared-Stepper::34.html Test schrieb: > Mir sieht die H-Brücke etwas sagen wir "unterkomplex" und eher nach > einem Prinzipschaltbild So sieht auch in der Realität die Schaltung aus, einfach und unkompliziert, schlimm?
Bernhard S. schrieb: > Test schrieb: >> Mir sieht die H-Brücke etwas sagen wir "unterkomplex" und eher nach >> einem Prinzipschaltbild > > So sieht auch in der Realität die Schaltung aus, einfach und > unkompliziert, schlimm? Nein! Aber Du weißt schon, daß Du böse bist? Wenn ich einen BUZ11 mit 5 V ansteuern würde, würde sich einer der vielen WanMins hier völlig heiser schreien ;-)
mal ein Einwurf aus der Mechanik-Ecke: Getriebe und hier insbesondere Planetengetriebe haben (wie weiter oben schon angesprochen)selten "glatte" Übersetzungsverhältnisse. Für allgemeine Antriebe achtet man eher extra darauf dass die Zähnezahlen teilerfremd sind. So vermeidet man periodische Störeffekte (es kommen seltener die gleichen Zähne zusammen).
Angehängte Dateien:

mechanikus schrieb: > mal ein Einwurf aus der Mechanik-Ecke: > Getriebe und hier insbesondere Planetengetriebe haben (wie weiter oben > schon angesprochen)selten "glatte" Übersetzungsverhältnisse. Für > allgemeine Antriebe achtet man eher extra darauf dass die Zähnezahlen > teilerfremd sind. So vermeidet man periodische Störeffekte (es kommen > seltener die gleichen Zähne zusammen). Danke für den Tipp, somit habe ich, als mechanisches Embryo wieder etwas dazugelernt :-) Bei einem Übersetzungsverhältnis von 5,18:1 ergeben sich exakt 1036 Schritte für den Steppermotor, wenn sich der Abtrieb eine Umdrehung drehen soll. Was ich nicht nachvollziehen kann, warum steht im Datenblatt Steps per revolution: 200 (motor shaft) *1000*(gear shaft) und nicht 1036 ? m.n. schrieb: > Nein! Aber Du weißt schon, daß Du böse bist? > Wenn ich einen BUZ11 mit 5 V ansteuern würde, würde sich einer der > vielen WanMins hier völlig heiser schreien ;-) Was ist daran nicht in Ordnung? Und hier prallen Welten aufeinander: Beitrag "Schrittmotor Stepper Endstufe Treiber Steuerung Schaltung Varianten Ideen Diskussion"
mechanikus schrieb: > mal ein Einwurf aus der Mechanik-Ecke: > Getriebe und hier insbesondere Planetengetriebe haben (wie weiter oben > schon angesprochen)selten "glatte" Übersetzungsverhältnisse. Für > allgemeine Antriebe achtet man eher extra darauf dass die Zähnezahlen > teilerfremd sind. So vermeidet man periodische Störeffekte (es kommen > seltener die gleichen Zähne zusammen). Das ist eine absolut nachvollziehbare Intention. Wäre auch vollkommen OK, wenn das tatsächliche Verhältnis denn auch so im Datenblatt und in der Produktauslobung stehen würde... Dann gäbe es z.B. diesen ganzen Thread nicht...
Angehängte Dateien:
-

Reichelt.jpg
85 KB
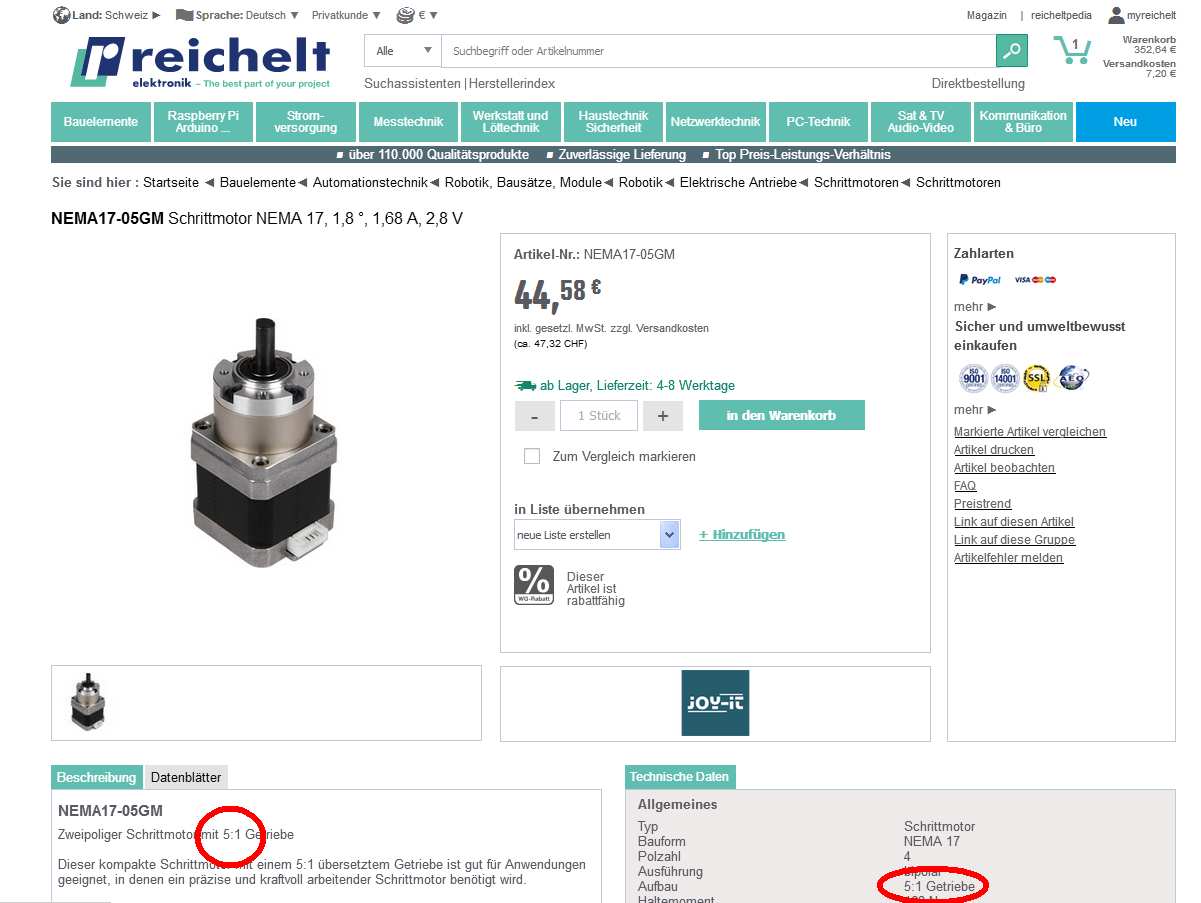
c-hater schrieb: > Wäre auch vollkommen OK, wenn das tatsächliche Verhältnis denn auch so > im Datenblatt und in der Produktauslobung stehen würde... > Dann gäbe es z.B. diesen ganzen Thread nicht.. Das stimmt, hat mich leider zwei Abende gekostet, hab natürlich zuerst den Fehler in meiner Soft- und Hardware gesucht. Soeben habe ich Reichelt per e-mail kontaktiert, bin mal gespannt, ob meine Bitte fruchtet. https://www.reichelt.de/ch/de/schrittmotor-nema-17-1-8-1-68-a-2-8-v-nema17-05gm-p269224.html?search=NEMA17-05GM&&r=1
Bernhard S. schrieb: > Soeben habe ich Reichelt per e-mail kontaktiert, bin mal gespannt, ob > meine Bitte fruchtet. Das ist ja nur ein kleines Blatt am Baum des Unsinns... Wie schon bemerkt, bieten unzählige andere Anbieter exakt denselben Scheiß mit exakt denselben (de facto falschen) Angaben an. Man müßte das Übel an der Wurzel packen. Aber: Man muss schon Chinesisch können, um die Wurzel überhaupt erstmal zu finden... Und ob man dann diese herausragenden Vertreter dieser 2000 Jahre alten Kulturnation davon überzeugen kann, eine korrekte Produktbeschreibung über alle ihre Distributionskanäle zu verbreiten? Ich hege da ernsthafte Zweifel... Wenn ich nicht schon kurz vor der Rente wäre, würde ich übrigens ernsthaft in Erwägung ziehen, chinesisch zu lernen. In der Elektronik hat man nämlich mittlerweile extrem oft dieselben Probleme, wie sie hier bei einer mechanischen Komponente auftraten. Absolut lausige Doku. An die tatsächlich brauchbare Doku kommt man nur ran, wenn man chinesisch spricht und schreibt oder Millionen-Stückzahlen abnimmt...
c-hater schrieb: > Man müßte das Übel an der Wurzel packen. Aber: Man muss schon Chinesisch > können, um die Wurzel überhaupt erstmal zu finden... ...lach.... Hier wurde z.B. das korrekte Übersetzungsverhältnis von 26.85: 1 angegeben: https://www.amazon.de/gp/product/B077YXYTDD/ref=ox_sc_act_title_4?smid=ABVRCUH7Y5NVN&psc=1
Angehängte Dateien:
-

R.jpg
46 KB
Ich bin extrem maximal erfreut, Reichelt hat die Produktbeschreibung NEMA17-05GM Schrittmotor NEMA 17, 1,8 °, 1,68 A, 2,8 V 5.18:1 angepasst.
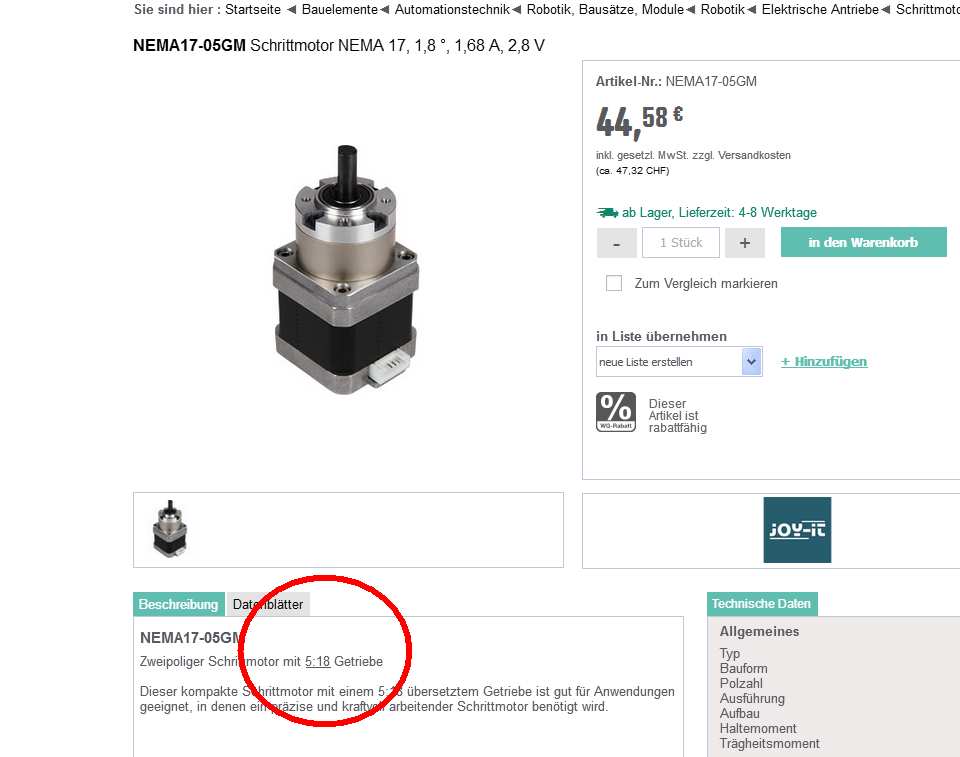
Bernhard S. schrieb: > Ich bin extrem maximal erfreut, Reichelt hat die Produktbeschreibung > > NEMA17-05GM Schrittmotor NEMA 17, 1,8 °, 1,68 A, 2,8 V 5.18:1 > > angepasst. Naja, so ganz richtig hat das doch noch nicht geklappt: - unter "Technische Daten" steht noch 5:1 - es ist kein 5:18 Getriebe, sondern ein 5,18:1 Getriebe.
Dietrich L. schrieb: > es ist kein 5:18 Getriebe, sondern ein 5,18:1 Getriebe. Du hast Recht, da war ja die Vorgängerversion der Beschreibung besser ;-)
Angehängte Dateien:
-

NEMA17-05GM.jpg
390 KB
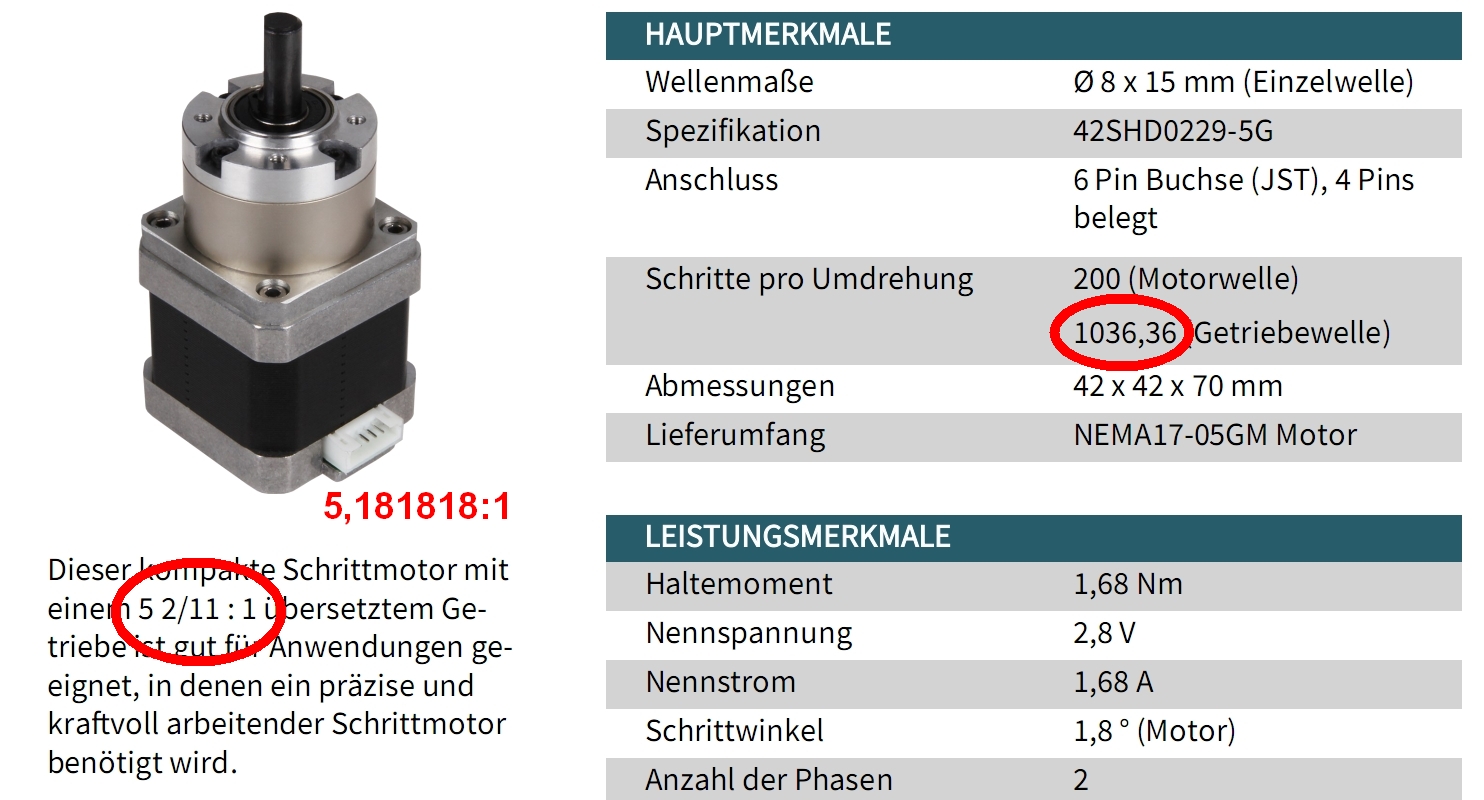
Nun steht auch das aktuelle Datenblatt zur Verfügung Das Übersetzungsverhältnis ist etwas ungünstig: 5,181818181818 : 1 1.036,36 Steps pro Umdrehung Getriebewelle. Bei 1.036 Steps fällt der "Schlupf" nicht gleich auf, aber nach einigen 100 Umdrehungen schon^^
Bernhard S. schrieb: > Bei 1.036 Steps fällt der "Schlupf" nicht gleich auf, > aber nach einigen 100 Umdrehungen schon^^ Da laufen sogar ja die Sterne weg.
Bernhard S. schrieb: > Bei 1.036 Steps fällt der "Schlupf" nicht gleich auf, > aber nach einigen 100 Umdrehungen schon^^ Ich bin mir nicht 100% sicher aber ich glaube das ist sogar der Schrittmotor den man in 3D-Druckern einsetzt. Also ist das entweder zu vernachlässigen oder die Software muss es ausgleichen.
Lottomann schrieb: > Da laufen sogar ja die Sterne weg. ich hoffe nicht, und selbst wenn, lässt sich bestimmt per Softare kompensieren, konnte es aber noch nicht konkret durchrechnen. Beitrag "Astrofotografie Nachführung parallaktische Montierung Ausrichteeinheit selber bauen Eigenbau ATmega8" Schlaumaier schrieb: > Also ist das entweder zu > vernachlässigen oder die Software muss es ausgleichen. das kommt auf den konkreten Anwendungsfall an, man sollte diese Besonderheit wenigstens wissen
Bernhard S. schrieb: > das kommt auf den konkreten Anwendungsfall an, man sollte diese > Besonderheit wenigstens wissen Genau. Sonst kann man es nicht programmieren. Ich plane für ca. Weihnachten ein Projekt wo diese "Kleinigkeit" sehr sehr wichtig ist. (S-8 digitalisieren). Wenn der einige 1000 Bilder digitalisiert hat, haut der nämlich gewaltig daneben. Deshalb finde ich den Thread hier so interessant. Ich wollte nämlich mit so ein Teil die Vortriebsrolle antreiben.
> Das Übersetzungsverhältnis ist etwas ungünstig: > 5,181818181818 : 1 Also 57:11, ist doch schön glatt ;-)
foobar schrieb: > Also 57:11, ist doch schön glatt ;-) löl. Mit einen Umsetz-Getriebe dahinter vielleicht.
Wieso löl? Saubere Brüche lassen sich doch schön konfigurieren. Eine Spindel mit z.B. 4mm/U konfiguriert man mit 57*200 Steps für 11*4mm Vortrieb (gekürzt 2850 Steps für 11mm) und hat eine exaktes Ergebnis.
Mag sein. Ich werde trotzdem eine Lichtschranke als Sicherheitstechnik einbauen bei mein S-8 Projekt. Ist ja kein Problem das Loch sauber zu treffen. Der Schrittmotor soll eh nur dafür da sein, damit der Vortrieb sauber und langsam ist.
Bernhard S. schrieb: > Lottomann schrieb: >> Da laufen sogar ja die Sterne weg. > > ich hoffe nicht, und selbst wenn, lässt sich bestimmt per Softare > kompensieren, konnte es aber noch nicht konkret durchrechnen. Bei den Sternen ist es sowieso besser, die Nachführung über eine Kamera zu Regeln. Ausrichtungsfehler der Montierung, elastische Verformungen und die Atmosphärenbrechnung kriegt man sonst schlecht in den Griff.
Schlaumaier schrieb: > bei mein S-8 Projekt Hast Du es hier veröffentlicht, würde mich interessieren :-)
Bernhard S. schrieb: > Hast Du es hier veröffentlicht, würde mich interessieren :-) Ist noch in der Vorplanung. Ich habe noch nicht alle Teile. Es geht eigentlich darum Super-8 Filme zu digitalisieren. Und mich reizt die Aufgabe. Kaufen kann man so Teile für ca. 350-500 Euro. Allerdings kotzen mich die Garantiebestimmungen an. Ich denke an eine andere Möglichkeit. Ein USB-Mikroskop was permanent arbeitet. Sobald das Bild sauber unter den Erfassungsbereich liegt wird ein Bild an den PC übertragen. Dann wird vom PC aus das Kommando gegen den Film soweit vorzuschieben bis das nächste Bild unter den USB-Mikroskop liegt und das Spiel geht von vorne los. Steuerung des ganzen über ein Arduino der am PC angeschlossen ist und von einer selbst geschriebenen Software seine Befehle bekommt. Ich hab keine Ahnung ob ich mich da übernommen habe, aber erste Versuche waren positiv. Im Prinzip fehlt mir noch noch die sauber arbeitende Mechanik und Mechanik war in der Praxis noch nie mein Ding. ;(. Ich bin erst seit 1 Woche stolzer Besitzer eines Mini-Kreuztisch aus China damit ich damit sauber fräsen kann.
Bernhard S. schrieb: >> Da laufen sogar ja die Sterne weg. > > ich hoffe nicht, und selbst wenn, lässt sich bestimmt per Softare > kompensieren, konnte es aber noch nicht konkret durchrechnen. > > Beitrag "Astrofotografie Nachführung parallaktische Montierung > Ausrichteeinheit selber bauen Eigenbau ATmega8" Dein Beitrag ist mir ja schon (oberflächlich) aufgefallen und deine Vorliebe für Assembler. Da kann es dann kitzelig werden, wenn man wegen der "krummen" Getriebe nicht mehr mit glatten Integerwerten rechnen kann und ggf. float Berechnungen braucht.
Schlaumaier schrieb: > Steuerung des > ganzen über ein Arduino der am PC angeschlossen ist und von einer selbst > geschriebenen Software seine Befehle bekommt. Dazu braucht man keinen Arduino sondern nur einen USB2GPIO-Wandler, das kann ein Arduino oder in sonstiger µC sein, z.B. ein SBC, IOwarrior oder ein usb4all, letztere gibt es schon mit fertiger Software.
Lottomann schrieb: > Getriebe nicht mehr mit glatten Integerwerten rechnen kann > und ggf. float Berechnungen braucht oh ja, dann wird's richtig eklig, zumal es auch noch schnell sein soll, vorallem bei großen Getriebeübersetzungen, momentan rechne ich schon mit 32Bit, noch dem Motto: so genau wie nötig Schlaumaier schrieb: > Im Prinzip fehlt mir noch noch die sauber arbeitende > Mechanik und Mechanik war in der Praxis noch nie mein Ding Eröffne doch mal einen separaten Beitrag dazu, ich könnte Wetten, Du bekommst sicherlich wertvolle Tipps dazu :-)
Beitrag #6582043 wurde von einem Moderator gelöscht.
> Getriebe nicht mehr mit glatten Integerwerten rechnen kann > und ggf. float Berechnungen braucht Ich kenne keine Getriebe mit irrationalen Übersetzungen. Und rationale Übersetzungen macht man mit Integern - da auf Float auszuweichen ist verkehrt, man erhöht nur die Fehler (ausschließlich Übersetzungen der Form a : 2^b sind exakt darstellbar - alle anderen werden gerundet) und schneller wird's auch nicht.
Bernhard S. schrieb: > Eröffne doch mal einen separaten Beitrag dazu, ich könnte Wetten, Du > bekommst sicherlich wertvolle Tipps dazu :-) Vielleicht hätte ich das sogar gemacht. Aber bei meine Ruf hier ... Ne danke. Das wird nicht passieren. Lieber riskiere ich das ich das Projekt in den Sand fahre. Dann weiß ich wenigstens das es an meinen Fehlern lag und kann es irgendwann besser machen. Ich hab mir schon als Kind abgewöhnt um Hilfe zu fragen und frage nur dann wenn es absolut nötig ist. Und das ist es bei den Projekt nicht. Und helfen kann man mir bei Mechanik sowieso nicht. Das muss ich ja selbst zusammen fummeln. Ich habe mir bei Ebay einen Super-8-Betrachter gekauft für 8 Euro. Den plane ich umzubauen. Er hat nämlich die wichtigsten 3 Teile die ich brauche. Nämlich 2 Spulenhalter + eine Filmtransportrolle, letztes ist das Teil mit den "Stacheln" für die Löcher im Film. Nur muss ich diese irgendwie mit den Schrittmotor verbinden. Und wie gesagt ist nicht so einfach für mich.
Bernhard S. schrieb: > m.n. schrieb: > >> Nein! Aber Du weißt schon, daß Du böse bist? >> Wenn ich einen BUZ11 mit 5 V ansteuern würde, würde sich einer der >> vielen WanMins hier völlig heiser schreien ;-) > > Was ist daran nicht in Ordnung? > Und hier prallen Welten aufeinander: > Beitrag "Schrittmotor Stepper Endstufe Treiber Steuerung Schaltung Varianten Ideen Diskussion" Um hier mal noch drauf zu antworten. Ich bin mir nicht sicher, aber ich dachte dass m.n. folgendes meinte: 5V zur Ansteuerung eines Mosfet ist zu wenig. Da diese vor allem bei höheren Schaltfrequenzen ein minimum an Spannung am Gate benötigen um interne Ladungskapazitäten beim Schalten umzuladen. Und bei H-Brücken kann diese Eigenschaft noch viel fatalere Folgen haben. Denn wenn die eine Brücke ausgeschaltet wird und ďie andere zur gleichen Zeit einschaltet (Einfache PWM) kommt es zum Kurzschluss für ein paar ųs/ms.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.