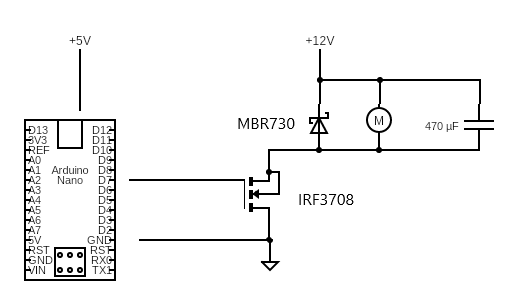
Hallo, ich würde gerne einen DC-Motor mit einer PWM-Schaltung regulieren. Vorab: Ich bin nicht besonders bewandert auf dem Gebiet der Elektronik , aber habe Grundwissen (ca. Stand 12. Klasse Physik und Grunderfahrungen mit Arduinos), weswegen ich meine dieses Projekt bestreiten zu können. Als Spannungsquelle käme ein altes PC-Netzteil zum Einsatz (12V-Schiene, max Output: 15A), und als Motor würde ich einen 12V-100W brushed DC-Motor verwenden, somit fließen maximal 8,3A. In den Artikeln hab ich diesen gefunden: https://www.mikrocontroller.net/articles/Motoransteuerung_mit_PWM , dabei würde ich die erste vorgestellte Variante (1-Quadrantensteller mit direktem Mosfettreiber) bevorzugen, der Einfachheit halber. Dazu habe ich ein paar Fragen: Die Freilaufdiode D1: Was für eine Funktion hat diese? Ich kenne Freilaufdioden sonst nur von Relais, aber da ein Motor auch eine induktive Last darstellt, hätte die dort ihre Berechtigung. Im Beitrag wird auch etwas von einer größeren Dimensionierung der Diode gesprochen, und dass diese gekühlt werden muss? Ist denn der "Rückwärtsstrom" wirklich so groß und wird auch länger aufrecht erhalten? Mosfet: Ist in der Abbildung ein anreichernder N-Kanal. Reicht da einer mit 9-10A kontinuierlichem Strom? Oder sollte ich da Reserven einplanen? Mosfettreiber: Ich habe in der Mosfet-Übersicht (https://www.mikrocontroller.net/articles/MOSFET-%C3%9Cbersicht#MOSFET-Treiber) auch Mosfet-Treiber gefunden, muss es ein spezieller sein? Alternativ könnte man sich auch etwas aus einem Arduino zusammenschustern. Danke schon mal für eure Antworten, Johan
Johan schrieb: > Die Freilaufdiode D1: Was für eine Funktion hat diese? Ich kenne > Freilaufdioden sonst nur von Relais, aber da ein Motor auch eine > induktive Last darstellt, hätte die dort ihre Berechtigung. Genau so ist es. > Im Beitrag > wird auch etwas von einer größeren Dimensionierung der Diode gesprochen, > und dass diese gekühlt werden muss? Ist denn der "Rückwärtsstrom" > wirklich so groß und wird auch länger aufrecht erhalten? Es ist kein Rückwärtsstrom. Wenn der FET (schlagartig) abgeschaltet, dann will der bisher durch den Motor (allg: durch die Induktivität) fließende Strom weiterfließen und das erfolgt dann über die Diode. Die Diode sollte also den maximalen Motorstrom schon vertragen, wenigstens kurzzeitig. > Mosfet: Ist in der Abbildung ein anreichernder N-Kanal. Reicht da einer > mit 9-10A kontinuierlichem Strom? Oder sollte ich da Reserven einplanen? Naja, der Motor nimmt nicht nur 8.3A auf sondern beim Anlaufen oder falls er blockiert wird, wesentlich mehr. Such dir eher einen, der so 50A oder mehr kann.
Dein DC-Motor braucht die 8A bei Nenndrehzehl und Nennlast. Steht der still und soll loslaufen, zieht der auch mal 80A. Der Anker ist eine Induktivität. Daher steigt der Strom "langsam" auf die 80A an. Langsam ist aber Größenordnung 1ms :-) Diese 1ms will der Strom bei ausgeschaltetem transistor auch weiter fließen -> Diode. Dein Mosfet sollte kurzzeitig um die 100A überleben, zwischen PC-Netzteil und Regler brauchst einen ernsthaften Elko. Die Diode muß auch 100A-impulse überleben und schnell sein.
Johan schrieb: > Danke schon mal für eure Antworten, Ein 100W Motor verträgt 100W Dauerlast ohne zu überhitzen. Er braucht mehr Strom, vor allem beim Anlauf und Blockieren bis zum 10-fachen. Deine Elektronik muss diesen Spitzenstrom verkraften, sonst ist sie schon beim ersten Anlauf kaputt. Schon dein Netzteil bringt den Anlaufstrom nicht, sondern schaltet ab. Du brauchst eine Strombegrenzung, die unter 15A die PWM vorzeitig beendet, und einen Transistor der diese 15A auch aushält. Es gibt MOSFET-Treiber mit Strombegrenzung, wie MIC5020 oder IR2121. Bei geringer Last oder Leerlauf fliesst weniger Strom. Die Freilaufdiode muss die 15A verkraften und schnell sein, bei deiner Spannung bietet sich eine Schottky-Diode wie MBR1535 an.
Helge schrieb: > Steht der > still und soll loslaufen, zieht der auch mal 80A. In der Überschrift steht PWM. Folglich muß man nicht so blöd sein, beim Start sofort auf 100% zu gehen. Steuert man die PWM von 10 - 100% in ca. 50 - 100ms hoch, wird die max. Stromaufnahme nicht über 10 A liegen. Bremsen geht ja sowieso nicht. Johan schrieb: > Reicht da einer > mit 9-10A kontinuierlichem Strom? Nimm einen FET mit möglichst kleinem RDSon, um die Verluste klein zu halten. Findet man dann noch einen Typ mit kleiner Gatekapazität, kann man den FET bei niedriger Schaltfrequenz direkt von einem Controller ansteuern.
Angehängte Dateien:
-

circuit.png
6,5 KB
Danke euch allen. Um den Anlaufstrom mach ich mir bei dem Netzteil eigentlich keine Sorgen, das hat schon Testweise 2 H4-Lampen (je 60W) befeuern können, also sollte kurzzeitig gut Strom geflossen sein. Trotzdem hatte ich vor den PWM erst langsam "anzufahren". Als Mosfet hätte ich den IRF2708 verwendet, der kann dauerhaft bis zu 60A, kurzzeitig bis fast 250A, sollte also mehr als reichen. PWMer schrieb: > Nimm einen FET mit möglichst kleinem RDSon, um die Verluste klein zu > halten. Findet man dann noch einen Typ mit kleiner Gatekapazität, kann > man den FET bei niedriger Schaltfrequenz direkt von einem Controller > ansteuern. RDSon beträgt bei dem maximal 12mOhm, ist das zu viel um den schnell zu schalten? Wäre max 100Hz weil mehr nicht nötig ist beim PWM. Gatekapazität, puh, welche ist das? Auf dem Datenblatt finden sich: Ciss (Input Capacitance) mit 2417 pF, Coss (Output Capacitance) mit 707 pF, Crss (Reverse Transfer Capacitance) mit 53 pF Diode wäre eine Schottky MBR745, die kann bis zu 150A peak (8,3ms lang) ab. Kondensator zur Glättung des PWM, wie groß sollte dieser gewählt werden? Ich habe generell das Gefühl, dass ich ich mit den bisherigen Bauteilen ein wenig im "Oversized"-Bereich liege, Vorschläge für andere Bauteile sind gerne gesehen.
Angehängte Dateien:
-

20210928_185458.png
7,2 KB
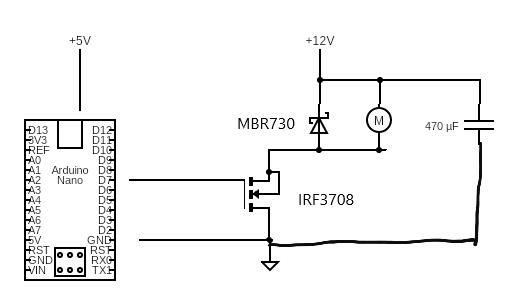
Helge schrieb: > ...zwischen PC-Netzteil und Regler brauchst einen > ernsthaften Elko. Helge hat das mit dem Elko eher so gemeint.
Johan schrieb: > Gatekapazität, puh, welche ist das? Auf dem Datenblatt finden sich: > Ciss (Input Capacitance) mit 2417 pF, Diese ist es. > Diode wäre eine Schottky MBR745, die kann bis zu 150A peak (8,3ms lang) > ab. Ich würde eine MBR1045 nehmen, wenigstens. > Kondensator zur Glättung des PWM, wie groß sollte dieser gewählt werden? 0µF
H. H. schrieb: > Michael M. schrieb: >> Helge hat das mit dem Elko eher so gemeint. > > Genau so! Oh, Fehler meinerseits, hatte ich falsch eingezeichnet. Reichen da trotzdem die aufgeschriebenen 470µF? H. H. schrieb: >> Diode wäre eine Schottky MBR745, die kann bis zu 150A peak (8,3ms lang) >> ab. > > Ich würde eine MBR1045 nehmen, wenigstens. Zu dieser Diode habe ich eine Frage: Auf dem Datenblatt sind 10A pro Bein der Diode vermerkt, heißt das dann, dass diese Diode bis zu 20A dauerhaft abkann ohne zerstört zu werden? Ich vermute nicht, da laut Pinbelegung die eigentliche Diode sich zwischen den beiden Kathoden und der Anode befindet. (Oder ging es dir nur um die 10A? Ich kann ja auch noch nach einer Diode suchen, die >15A tauglich ist.) H. H. schrieb: > Johan schrieb: >> Gatekapazität, puh, welche ist das? Auf dem Datenblatt finden sich: >> Ciss (Input Capacitance) mit 2417 pF, > > Diese ist es. Ist das "zu viel" um den Mosfet mit einem Microcontroler à la Arduino betreiben zu können?
Johan schrieb: > Reichen da trotzdem die aufgeschriebenen 470µF? Kommt auf die Länge und den Querschnitt der Zuleitung an. >> Ich würde eine MBR1045 nehmen, wenigstens. > > Zu dieser Diode habe ich eine Frage: Auf dem Datenblatt sind 10A pro > Bein der Diode vermerkt, Zeig das Datenblatt. >>> Ciss (Input Capacitance) mit 2417 pF, > Ist das "zu viel" um den Mosfet mit einem Microcontroler à la Arduino > betreiben zu können? Für 100Hz PWM kein Problem.
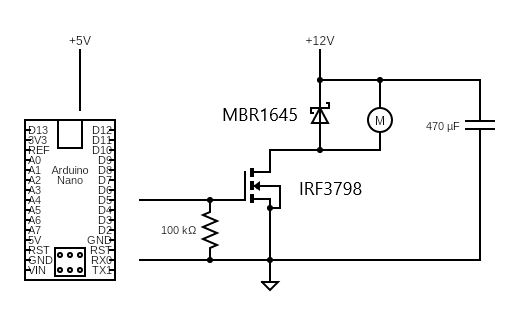
Mach da noch einen Pulldown mit 4,7k - 100k vom Gate zur Masse. Das sperrt den MOSFet, solange er an einem uninitialisierten Port hängt.
Matthias S. schrieb: > Mach da noch einen Pulldown mit 4,7k - 100k vom Gate zur Masse. > Das > sperrt den MOSFet, solange er an einem uninitialisierten Port hängt. Oh ja, wichtiger Tip!
Johan schrieb: > Kondensator zur Glättung des PWM Die Motor-Spannung glätten willst / mußt Du nicht. Du taktest (legst zeitweilig, mit Unterbrechungen an - effektiv eine Verringerung) halt einfach nur die Spannung, und die "Stromglättung" übernimmt die Motor-Induktivität. Der Puffer-Elko direkt über der Schaltstufe entlastet (und entstört) alles. Dieser ist praktisch unverzichtbar für einwandfreie Funktion.
H. H. schrieb: >>> Ich würde eine MBR1045 nehmen, wenigstens. >> >> Zu dieser Diode habe ich eine Frage: Auf dem Datenblatt sind 10A pro >> Bein der Diode vermerkt, > > Zeig das Datenblatt. Sowohl hier https://m.littelfuse.com/~/media/electronics/datasheets/power_semiconductors/littelfuse_power_semiconductor_schottky_diode_mbr1045_datasheet.pdf.pdf als auch hier https://www.vishay.com/docs/88669/mbr10xx.pdf H. H. schrieb: > Johan schrieb: > >> Reichen da trotzdem die aufgeschriebenen 470µF? > > Kommt auf die Länge und den Querschnitt der Zuleitung an. Querschnitt: 18er AWG, also 1mm^2, hin und zurück je 50-75cm (nur die Zuleitungen zum Motor, also "wo die Kabel von der Diode abgehen und wieder ankommen", blöde zu beschreiben :-/) H. H. schrieb: > Matthias S. schrieb: >> Mach da noch einen Pulldown mit 4,7k - 100k vom Gate zur Masse. >> Das >> sperrt den MOSFet, solange er an einem uninitialisierten Port hängt. > > Oh ja, wichtiger Tip! Ist eingezeichnet, danke sehr! pi t schrieb: > Der Puffer-Elko direkt über der Schaltstufe entlastet (und entstört) > alles. Dieser ist praktisch unverzichtbar für einwandfreie Funktion. Blöde Frage: Welcher Puffer-Elko? Bzw. wo käme der hin?
Michael M. schrieb: > 20210928_185458.png Pufferelko. Elko, Diode, Transistor gehören nah beieinander. Übrigens in Akkuschraubern sind Motoren der Leistungsklasse mit PWM in der Größenordnung 2-5kHz angesteuert. Das paßt besser zur Motorinduktivität.
Helge schrieb: > Michael M. schrieb: >> 20210928_185458.png > Pufferelko. War da ein Bild? Wird mir nicht angezeigt. Helge schrieb: > Elko, Diode, Transistor gehören nah beieinander. > Übrigens in Akkuschraubern sind Motoren der Leistungsklasse mit PWM in > der Größenordnung 2-5kHz angesteuert. Das paßt besser zur > Motorinduktivität. Die ganze Elektronik sollte auch nah bei einander, nur halt dann 2 Kabel raus für den Motor. Wie hoch die PWM-Frequenz sein soll hängt ja in meinem Fall scheinbar nur an der Geschwindigkeit vom Arduino und an der des Mosfets. Laut Datenblatt, wenn man Rise und Fall time und deren Delays verrechnet, dann landet man bei einer maximalen Frequenz von ca 12 MHz, in wie weit da die Kapazität eine Rolle spielt ist mir leider unbekannt, so bewandert bin ich auf dem Thema nun auch nicht. Eine (hoffentlich) letzte Frage habe ich dennoch: Wenn durch den Mosfet teilweise 100W fließen, dann wird der sicherlich eine Kühlung benötigen oder? Ich vermute, das hängt am Innenwiderstand, welcher ja hier bei mir mit ca 8mOhm angegeben ist. Der Mosfet ist mit einer "Maximum Power Dissipation" von 87W bei 25°C angegeben, ich nehme an, der Mosfet ist also doch nichts für meine Anwendung?
Beim still stehenden Motor (60-80A) fallen am Mosfet 0,5-0,6V ab nach Datenblatt. Da ist die PWM dann hoffentlich so bei 5%. Das sind durchschnittlich 1,5-2,5W beim loslaufen. Ganz ohne Kühlkörper könnte das warm werden, aber nicht sehr. Irgendwann geht der Strom ja runter auf die 8A. Dann bleiben nur noch paar mW im Transistor hängen.
Johan schrieb: > Helge schrieb: >> Michael M. schrieb: >>> 20210928_185458.png >> Pufferelko. > War da ein Bild? Wird mir nicht angezeigt. Beitrag "Re: PWM Leistungstreiber für DC-Motoren" In diesem Beitrag wurde das von Helge genannte Bild hochgeladen. Mit "Schaltstufe" ist der aus Lowside-Mosfet und Highside-Diode gebildete Halbbrücken-Tiefsetzsteller (Step-Down) gemeint, der Puffer- bzw. Stütz-Elko muß "außen" (und eben nicht, wie Du aber anfangs beschrieben hattest, die Motorspannung glätten). MaWin schrieb: > Ein 100W Motor verträgt 100W Dauerlast ohne zu überhitzen. > > Er braucht mehr Strom, vor allem beim Anlauf und Blockieren bis zum > 10-fachen. Das hast Du nicht realisiert, glaube ich - ohne den Anlaufstrom zu begrenzen (den Tastgrad langsam steigern = Sanfanlauf, jedoch in der PWM-Erzeugung dafür zu sorgen, oder wie MaWin riet, über einen Gatetreiber mit Strommessung und -limit) also viele (!) A. Johan schrieb: > Der Mosfet ist mit einer "Maximum Power > Dissipation" von 87W bei 25°C angegeben, ich nehme an, der Mosfet ist > also doch nichts für meine Anwendung? Nicht doch. Die Leitverluste eines durchgeschalteten Mosfets sind "nur" R_ON * I², weit unter der max. erlaubten P_tot also. Der Großteil der Leistung soll/muß doch über den Motor Arbeit verrichten (ist der größte Vorteil geschalteter Endstufen).
Johan schrieb: > und als Motor würde ich einen 12V-100W brushed > DC-Motor verwenden, somit fließen maximal 8,3A. Mir sind da auch sofort die Begriffe "Anlaufstrom" und "Blockierstrom" in den Sinn gekommen. Und mir scheint, du unterschätzt das ein wenig. Johan schrieb: > Trotzdem hatte ich vor den PWM erst langsam "anzufahren". Was soll der Motor denn überhaupt bewegen? Denn je nach Last kannst du dir das ja gar nicht ausssuchen. Denn der Witz ist, dass du ja möglicherweise auch bei langsamer Drehzahl trotzdem die Leistung brauchst, um "Etwas" zu bewegen. Ein Lüfterrad kannst du langsam anlaufen lassen, dann braucht es wenig Leistung. Wenn das aber eine Mechanik ist, die erst mal "losgerissen" werden muss (Stichwort hier: Haft- und Gleitreibung), dann bleibt die einfach stehen, bis genug Leistung da ist. Johan schrieb: > Eine (hoffentlich) letzte Frage habe ich dennoch: Wenn durch den Mosfet > teilweise 100W fließen Druch den Mosfet "fließt" keine Leistung. Sondern du hast an ihm Schaltverluste und statische Verluste. > dann wird der sicherlich eine Kühlung benötigen oder? Kommt auf die Ansteuerung an: wenn du mit flachen Flanken bei hoher PWM-Frequenz schaltest, dann hast du hohe Schaltverluste. Wenn du mit steilen Flanken schaltest, dann wird schnell EMV ein Thema. Johan schrieb: > Wie hoch die PWM-Frequenz sein soll hängt ja in meinem Fall scheinbar > nur an der Geschwindigkeit vom Arduino und an der des Mosfets. Wie gesagt: hohe PWM-Frequenz -> steile Schaltflanken nötig -> Störsender Johan schrieb: > Die Freilaufdiode D1: Was für eine Funktion hat diese? Wenn du den Mosfet einschaltest, dann beginnt ein Strom durch die Motorinduktivität zu fließen und erreicht irgendwann z.B. 8A. Dann wird der Mosfet abgeschaltet. Weil der Motor nun eine Induktivität ist, fließt der Strom getreiben von der Induktivität in seiner ganzen Pracht mit 8A einfach weiter. Dass er das ungehindert kann und schnell wieder einen Weg zurück in die Motorspule findet, ist die Freilaufdiode da. Sie sorgt dafür, dass der Strom kontrolliert auf kürzestem Weg weiterfließen kann. Wenn die Diode nicht da ist, muss sich der Strom auf dem Weg zurück zum Motor irgendeinen Weg durch die Schaltung suchen und auf nimm auf diesem widerstandsreichen Weg wegen U=R*I unangenehm hohe Spannungswerte an. Das solltest du grundlegend verstanden haben. BTW: Mein Vorschlag wäre übrigens, dass du die Sache erstmal mit einem deutlich kleineren Motor (im100mA Bereich) angehst. Und daran lernst. Denn dann hast du schon mal das potentielle Problem mit dem unterdimensionierten Netzteil nicht... BTW2: Ganz interessant wird es übrigens, wenn die Last am Motor generatorisch wirken kann. Wenn du z.B. ein Gewicht nach oben ziehst und dann den Motor abschaltest, wenn das Gewicht oben ist, dann "fällt" das Gewicht zurück zum Boden und dreht dabei den Motor. Erst langsam, dann schneller und schneller. Dabei wirkt der Motor als Generator und speist Energie zurück in deine Schaltung.
Lothar M. schrieb: > Dabei wirkt der Motor als Generator und speist > Energie zurück in deine Schaltung. Blöd ist auch, wenn der Motor, trotz dem er 12V bekommt, langsamer dreht, weil er die 12V "häppchenweise" bekommt. Eben weil er da nicht generatorisch gegensteuert, dürfte der Motorstrom bei mittleren Tastgraden erheblich ansteigen. Wollte ich sowieso mal "ordentlich messen" und dokumentieren. Wir hatten ja Anfang des Jahres eine ähnlich Diskussion in Verbindung mit einem größeren PC-Lüfter. Da war das allerdings am Ende dann doch ganz anders, wie ich anschließend gern zugeben durfte.
Lothar M. schrieb: > Wenn das aber eine > Mechanik ist, die erst mal "losgerissen" werden muss (Stichwort hier: > Haft- und Gleitreibung), dann bleibt die einfach stehen, bis genug > Leistung da ist. Das macht doch nichts. Das Problem ist konstruiert. > Erst langsam, dann > schneller und schneller. Bei James Bond endet das immer in einer riesigen Explosion... Der TO wollte einen einfachen Drehzahlsteller bauen. Falls er es sich anders überlegen sollte kann er eine oder zwei H-Brücken nehmen. VNH3SP30 wäre ein passender Kandidat. Johan schrieb: > Ich habe generell das Gefühl, dass ich ich mit den bisherigen Bauteilen > ein wenig im "Oversized"-Bereich liege, Vorschläge für andere Bauteile > sind gerne gesehen. Wenn du einen Arduino Nano verwenden willst, gibt es ein Beispiel im Projekt-Forum. Beitrag "Drehzahlregler für DC-Motor, ATmega48-328" Da muß bei niedriger Drehzahl nichts "losgerissen" werden. Axel R. schrieb: > Blöd ist auch, wenn der Motor, trotz dem er 12V bekommt, langsamer > dreht, weil er die 12V "häppchenweise" bekommt. Eben weil er da nicht > generatorisch gegensteuert, dürfte der Motorstrom bei mittleren > Tastgraden erheblich ansteigen. Diese "Konstruktion" mußt du schon näher erklären. Mit 5 Hz PWM wird der TO wohl kaum arbeiten. EMK erzeugt der Motor sobald er sich dreht.
Also: Der Motor soll in einem Winkelschleifer/Fräser zum Einsatz kommen, den verwendet man in etwa wie einen Dremel, nur viel sachter, also nicht volle Möhre ins Metall gehalten. "Last" die der Motor beim hochfahren bewegen muss ist ein Fräser, der halt max. 10g wiegt. Ansonsten sind die Anforderungen bloß dass der Motor bei (Dreh-)Widerstand nicht zu langsam wird, aber wenn man den bloß zum schleifen einsetzt (also mehr Drehzahl und behutsam, als Druck) dann dürfte das funktionieren. pi t schrieb: > Nicht doch. Die Leitverluste eines durchgeschalteten Mosfets > sind "nur" R_ON * I², weit unter der max. erlaubten P_tot also. > > Der Großteil der Leistung soll/muß doch über den Motor Arbeit > verrichten (ist der größte Vorteil geschalteter Endstufen). Dann muss der Mosfet bei Vollauslastung des Netzteils 2,7W an Leistung abführen. Wenn man es dann noch schafft per PWM den Anlaufstrom unter Netzteilgrenze zu halten, sehe ich da kein Problem den Mosfet ohne Kühlkörper zu verwenden. Lothar M. schrieb: > Mir sind da auch sofort die Begriffe "Anlaufstrom" und "Blockierstrom" > in den Sinn gekommen. Und mir scheint, du unterschätzt das ein wenig. Ja, das mag gut sein. Ich wiege mich in sofern sicher, dass mein Netzteil bei einer Belastung von >15A der 12V-Schiene automatisch abschaltet. Vorallem wegen der kurzzeitig auftretenden hohen Strömen habe ich mich gegen eine 12V Autobatterie entschieden, die sonst von vielen für diesen Zweck verwendet wird. Lothar M. schrieb: > Wie gesagt: > hohe PWM-Frequenz -> steile Schaltflanken nötig -> Störsender PWM-Frequenzen betragen hier Arduino-bedingt maximal 490Hz, was auch für eine aureichend große Auflösung sorgen sollte. Ist dann dementsprechend auch eine Rechteckwelle, aber noch vergleichbar niederfrequent. Ist da schon ein "Störsenderschutz" notwendig? Lothar M. schrieb: > Wenn du den Mosfet einschaltest, dann beginnt ein Strom durch die > Motorinduktivität zu fließen und erreicht irgendwann z.B. 8A. Dann wird > der Mosfet abgeschaltet. Weil der Motor nun eine Induktivität ist, > fließt der Strom getreiben von der Induktivität in seiner ganzen Pracht > mit 8A einfach weiter. Dass er das ungehindert kann und schnell wieder > einen Weg zurück in die Motorspule findet, ist die Freilaufdiode da. Sie > sorgt dafür, dass der Strom kontrolliert auf kürzestem Weg > weiterfließen kann. > Wenn die Diode nicht da ist, muss sich der Strom auf dem Weg zurück zum > Motor irgendeinen Weg durch die Schaltung suchen und auf nimm auf diesem > widerstandsreichen Weg wegen U=R*I unangenehm hohe Spannungswerte an. > Das solltest du grundlegend verstanden haben. Das Prinzip kenne ich schon von Relais, wenn man die Diode da weglässt und im richtogen Moment die Spulenkontakte anfasst, bekommt man eine gewischt. Lothar M. schrieb: > BTW: Mein Vorschlag wäre übrigens, dass du die Sache erstmal mit einem > deutlich kleineren Motor (im100mA Bereich) angehst. Und daran lernst. > Denn dann hast du schon mal das potentielle Problem mit dem > unterdimensionierten Netzteil nicht... Mach ich gerne, mal sehen was sich noch so in der Bastelkiste finden lässt. Nur ich glaube immer noch nicht, dass mein Netzteil unterdimensioniert ist, es konnte 2 H4 (je 60W) Lampen parallel anschalten und auch dauerhaft laufen lassen. Lothar M. schrieb: > BTW2: Ganz interessant wird es übrigens, wenn die Last am Motor > generatorisch wirken kann. Wenn du z.B. ein Gewicht nach oben ziehst und > dann den Motor abschaltest, wenn das Gewicht oben ist, dann "fällt" das > Gewicht zurück zum Boden und dreht dabei den Motor. Erst langsam, dann > schneller und schneller. Dabei wirkt der Motor als Generator und speist > Energie zurück in deine Schaltung. Kann bauartbedingt nicht passieren. Axel R. schrieb: > Blöd ist auch, wenn der Motor, trotz dem er 12V bekommt, langsamer > dreht, weil er die 12V "häppchenweise" bekommt. Eben weil er da nicht > generatorisch gegensteuert, dürfte der Motorstrom bei mittleren > Tastgraden erheblich ansteigen. Wie darf ich das verstehen? Der Motor sollte genügend Trägheit besitzen, um die PWM-"Lücken" auszugleichen. Und bei 12V gewünschter Motorspannung wäre der Dutycycle eben 100%. PWMer schrieb: > Wenn du einen Arduino Nano verwenden willst, gibt es ein Beispiel im > Projekt-Forum. Beitrag "Drehzahlregler für DC-Motor, ATmega48-328" > Da muß bei niedriger Drehzahl nichts "losgerissen" werden. Sieht interessant aus, auch die Selbstkontrolle des Systems ist schnieke, ich schau es mir mal genauer an.
Johan schrieb: > Auf dem Datenblatt sind 10A pro Bein der Diode vermerkt, heißt das dann, > dass diese Diode bis zu 20A dauerhaft abkann ohne zerstört zu werden Nein. Es ist nur 1 Diode drin. 10A fliessen über das eine Bein rein und über das andere oder die Lasche ab. Eine MBR1535 hätte 2 Dioden und 7.5A per leg 15A gesamt. https://www.onsemi.com/pdf/datasheet/mbr1535ct-d.pdf Die Lasche hat ihr hübsches Loch nicht zum Aufhängen im Selbstbedienungsregal, sondern zum Anschrauben auf ein Kühlblech. Für 10A ist das auch nötig.
Wie groß sollte ich das Kühlblech dimensionieren? Wäre eine aktive Kühlung per Lüfter empfehlenswert? Außerdem habe ich den Regler mal mit einem normalen NPN und einer Standard-Diode und einem 500mA-DC-Motor nachgebaut, läuft so wie ich es mir vorstelle, bis auf, das der Motor unter ca 33% Duty cycle nicht anlaufen will. Wenn man aber die Spannung von oben nach unten regelt, dann behält er seine Bewegung bis ca 25% Duty cycle bei. Bekomme ich den Motor noch darunter flüssig bewegt?
Johan schrieb: > Wie groß sollte ich das Kühlblech dimensionieren? Es ist für ca. 6 Watt kein richtiger Kühlkörper nötig, es reichen 10K/W. Ein 5x5 cm 2mm AluBlech tut es schon, oder ein Gehäuseblech.
Johan schrieb: > PWM-Frequenzen betragen hier Arduino-bedingt maximal 490Hz Das ist so nicht ganz richtig. Du kannst auch direkt auf die Register zugreifen und somit andere Frequenzen realisieren. Der ATmega hat mehrere PWM-Modi. Wenn man Tastverhältnis und Frequenz "on the fly" ändern möchte, empfiehlt sich der phasen- und frequenzsynchrone Modus (Modus 9). Mit Timer 1 geht der Modus allerdings nur an einem Pin (PB2 bzw. Pin 10 des Arduino Nano), nicht an Pin 9 (PB1), da das Register OCR1A bereits genutzt wird. Hatte sowas ähnliches mal für einen Akkuschrauber-Motor gebaut. Die PWM-Frequenz lässt sich zwischen 1 kHz und 10 kHz variabel wählen. Es hat sich gezeigt, dass beim Anlaufen eine hohe Frequenz, die dann graduell mit zunehmendem Tastgrad abgesenkt wird, ein sehr sanftes Anlaufen erlaubt. Also 1% PWM => ca. 10 kHz bis 99% PWM => ca. 1 kHz. Wenn man den Stromverlauf auf dem Oszi anschaut, sieht man folgendes: Der Strom durch den MOSFET und Motor beginnt näherungsweise linear anzusteigen. Ist die PWM-Frequenz gering, erreicht er einen höheren Wert, bevor der MOSFET wieder abschaltet. Ist die Frequenz hoch, steigt der Strom gleich schnell, erreicht aber aufgrund der kürzeren Periodendauer nur einen geringeren Wert. Johan schrieb: > Wenn man es dann noch schafft per PWM den Anlaufstrom unter > Netzteilgrenze zu halten Mit dieser Technik oben muss das Netzteil nicht viel mehr als den Nennstrom liefern, wenn es gut justiert ist. Lässt sich sehr gut mit einem Labornetzteil mit CC-Schwelle und Anzeigelampe dafür ausprobieren. Zur Diode: Kritisch sind da vor allem kleine Tastverhältnisse bei (noch) stehendem oder blockiertem Motor. Wenn der Strom bereits eine nennenswerte Größe erreicht hat, der dann durch die Diode weiterfließen muss. Sobald der Motor läuft, entspannt sich das etwas. Sobald du auf 100% Tastgrad bist, wir die Diode nicht mehr beansprucht. D.h. solange während dem Hochfahren die thermische Grenze (und Impulsbelastung) nicht überschritten wird, sollte das passen. Kann man auch gut ausprobieren. Der Motor muss ja nicht direkt mechanisch belastet werden. Johan schrieb: > Schaltplan nach aktuellem Stand Das ist ein IRF3708, oder? (Wie in der früheren Version). Den IRF3798 habe ich nicht gefunden. Die Diode sollte passen, der MOSFET auch. Wenn du die nur zum Anlaufen des Motors in wenigen Sekunden nutzt, dann geht beides ohne Kühlkörper. Meinen Versuchen in unterschiedlichen Betriebszuständen nach war der MOSFET (IRF8010 oder andere ähnlich IRF3708) immer kühler als die Diode (hatte aber einen diskreten Gatetreiber mit Bipolartransistoren verwendet). Was man noch machen sollte: 470 uF sind sicher ein gepolter Elko (Schaltsymbol anpassen). Vom Arduino zum Gate könnte man noch 10-22 Ohm einbauen. Das reduziert den Maximalstrom durch die Ausgangsstufe im ATmega, wenngleich die da sehr robust sind. Wichtig ist auch, dass der ATmega eine gute Versorgung besitzt, die unabhängig von Spannungseinbrüchen bei den 12V ist (Diode und eigener Elko vor Vin). Beim PC-Netzteil weniger schlimm, aber bei einem Labornetzteil mit CC und Gatetreiber kann der MOSFET kaputt gehen, wenn in CC die Spannung sinkt, der Gatetreiber das Gate nicht mehr ausreichend durchsteuern kann und der MOSFET in den linearen Bereich gerät.
Sam W. schrieb: > Hatte sowas ähnliches mal für einen Akkuschrauber-Motor gebaut. Die > PWM-Frequenz lässt sich zwischen 1 kHz und 10 kHz variabel wählen. Es > hat sich gezeigt, dass beim Anlaufen eine hohe Frequenz, die dann > graduell mit zunehmendem Tastgrad abgesenkt wird, ein sehr sanftes > Anlaufen erlaubt. > Also 1% PWM => ca. 10 kHz bis 99% PWM => ca. 1 kHz. > Wenn man den Stromverlauf auf dem Oszi anschaut, sieht man folgendes: > Der Strom durch den MOSFET und Motor beginnt näherungsweise linear > anzusteigen. Ist die PWM-Frequenz gering, erreicht er einen höheren > Wert, bevor der MOSFET wieder abschaltet. Ist die Frequenz hoch, steigt > der Strom gleich schnell, erreicht aber aufgrund der kürzeren > Periodendauer nur einen geringeren Wert. Wenn die Frequenz zum Motor gut paßt, muß so etwas nicht zwingend nötig sein. Obwohl es bei Dir damals bestimmt Vorteile brachte: Ein Akkuschrauber muß immerhin über einen extrem breiten Drehzahl- bereich hohes Drehmoment aufbringen können, und noch dazu sensibel steuerbar sein. Viele Anwendungen erlauben aber doch simplere Ansteuerung. Wird ja tausendfach viel simpler gemacht. Lothar M. schrieb: > Johan schrieb: >> Trotzdem hatte ich vor den PWM erst langsam "anzufahren". > Was soll der Motor denn überhaupt bewegen? Denn je nach Last kannst du > dir das ja gar nicht ausssuchen. Denn der Witz ist, dass du ja > möglicherweise auch bei langsamer Drehzahl trotzdem die Leistung > brauchst, um "Etwas" zu bewegen. Ist imho die wichtigste Frage, und unter weiterer Kenntnisnahme des Motors (Datenblatt) könnte man... "Nägel mit Köpfen machen", welche Frequenz es ca. sein sollte bzw. müßte (woraus sich ergäbe ob Gate-Treiber nötig / sogar welcher optimal wäre - oder ob man sogar besser auf einen integrierten Motortreiber wechselte etc.).
Sam W. schrieb: > Johan schrieb: >> PWM-Frequenzen betragen hier Arduino-bedingt maximal 490Hz > > Das ist so nicht ganz richtig. Du kannst auch direkt auf die Register > zugreifen und somit andere Frequenzen realisieren. Danke für den Tipp, das seh ich mir mal näher an. Sam W. schrieb: > Das ist ein IRF3708, oder? (Wie in der früheren Version). Den IRF3798 > habe ich nicht gefunden. > Die Diode sollte passen, der MOSFET auch. Wenn du die nur zum Anlaufen > des Motors in wenigen Sekunden nutzt, dann geht beides ohne Kühlkörper. > Meinen Versuchen in unterschiedlichen Betriebszuständen nach war der > MOSFET (IRF8010 oder andere ähnlich IRF3708) immer kühler als die Diode > (hatte aber einen diskreten Gatetreiber mit Bipolartransistoren > verwendet). Mist, verschrieben. Ja sollte ein IRF3708 sein. Ich wollte den Motor aber trotzdem bei Bedarf in Teilspannung (>6V - 12V) nutzen, deswegen ja auch der ganze Hockauf mit Regler und Co. pi t schrieb: > Ist imho die wichtigste Frage, und unter weiterer Kenntnisnahme > des Motors (Datenblatt) könnte man... "Nägel mit Köpfen machen", > welche Frequenz es ca. sein sollte bzw. müßte (woraus sich ergäbe > ob Gate-Treiber nötig / sogar welcher optimal wäre - oder ob man > sogar besser auf einen integrierten Motortreiber wechselte etc.). Der Motor soll einen Winkelfräser betreiben, ob ich das Datenblatt hier einfach so verlinken darf ist mir noch ein wenig unklar. Zu dem Datenblatt gibt es keinen direkten Link, ich müsste euch eine Seite aus einem Shop verlinken, das könnte dann unter Werbung fallen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.