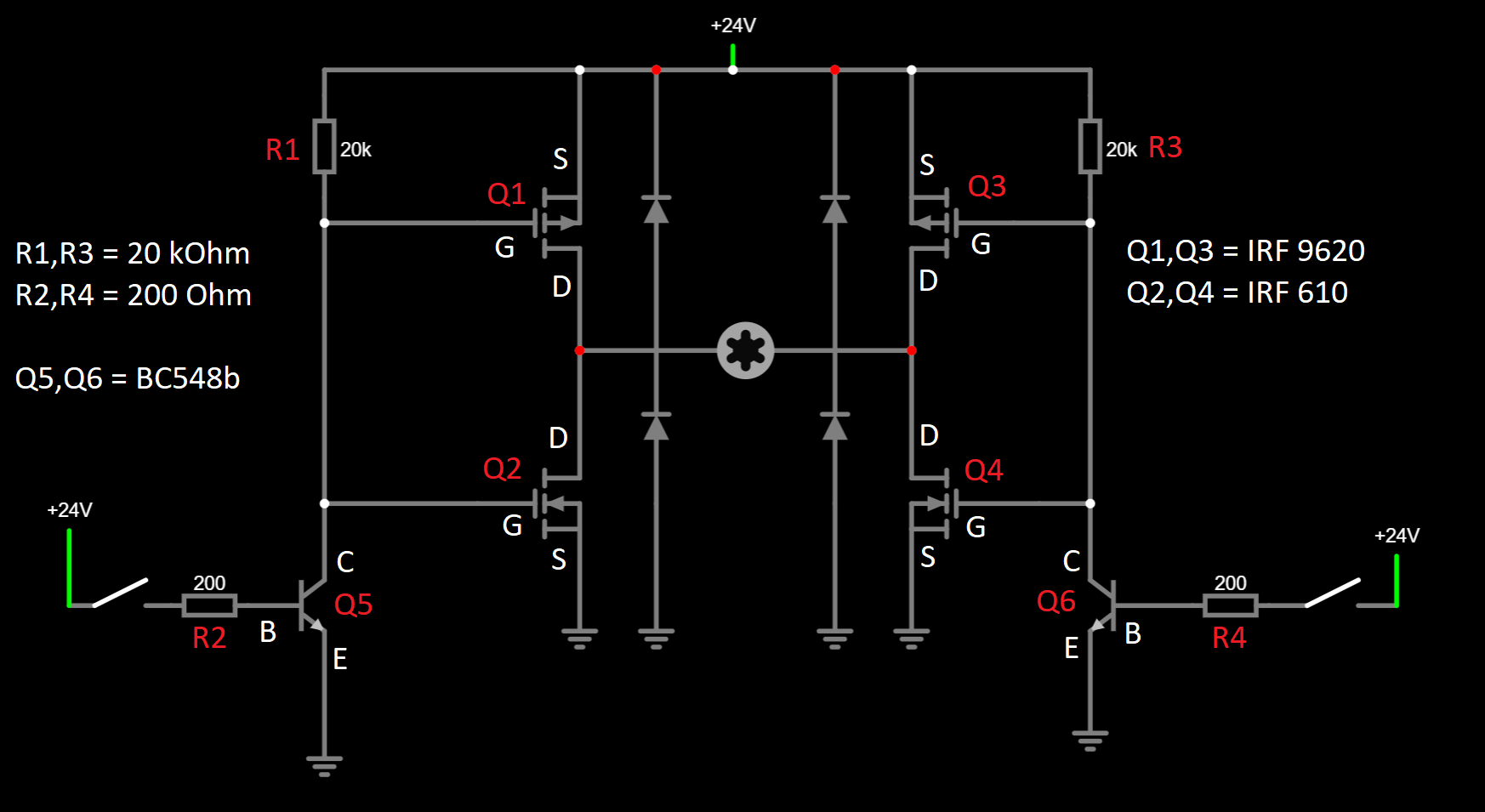
Hallo Zusammen, ich hab einen Plan für eine Mosfet H-Brücke entworfen und wollte wissen ob die Dimensionierung der Widerstände passt. Das Design habe ich nur von wo anders übernommen. Ich habe das ganze auf einem Breadboard aufgebaut. Mein Problem ist allerdings, dass die Mosfets auch im "Ruhezustand" sehr heiß werden. Kühlkörper werden natürlich bei der fertigen Version verbaut. Das zweite Problem ist, dass der Transistor nicht durch schaltet. P-Channel Mosfets: IRF 9620 N-Channel Mosfets: IRF 610 Transistoren: BC548b Dann kommt noch dazu, dass die Versorgungsspannung variabel 6-24V ist. Ich kenne mich leider nicht gut genug aus mit Elektronik, daher bitte ich hier um Unterstützung. LG, Teebow Edit: Ignoriert das das Bild 2 mal drin ist.
Angehängte Dateien:
-

H-Bruecke1.png
66 KB
Malte S. schrieb: > Das Design habe ich nur von wo anders übernommen. Dort wurde die Schaltung mit 5V betrieben, stimmts? Das Problem an solchen billigen Prinzipschltungen ist, dass sie nur prinzipiell funktionieren. Bei 24V am Gate werden deine Mosfets recht schnell das Zeitliche segnen, weil schon im Datenblatt steht, dass sie max. 20V Ugs aushalten und dann kaputt gehen. Und natürlich hat deine Schaltung keine Totzeit, somit leiten beim Umschalten vom oberen zum unteren Mosfet (und umgekehrt) beide und schließen die Versorgung kurz. Dass die Umschaltung dank des sehr hochohmigen Gatepullups auch noch schnarchlangsam passiert, macht die Sache nicht besser. Malte S. schrieb: > Ich kenne mich leider nicht gut genug aus mit Elektronik Wird schon noch, war bei mir auch mal so. Aber fang zum Lernen einfach mal mit niedrigeren Spannungen an. Und sieh dir andere, funktionierende Aufbauten mit brauchbaren Gate-Treibern an.
Bau mal eine solche Schaltung in einem Simulator virtuell auf, um sie besser zu verstehen. Spart Dir die ganzen Teile, die beim Testen verbraten werden. Nimm z.B. LTSpice von Linear, jetzt Analog Device oder das Programm Microcap12, da auch frei im Netz zu finden ist. #www.analog.com/en/design-center/design-tools-and-calculators/ltspice-si mulator.html #spectrum-soft.com/download/download.shtm Markus
Lothar M. schrieb: > Bei 24V am Gate werden deine Mosfets recht schnell das Zeitliche segnen Ich dachte die 20kOhm Widerstände dazu da. Das Problem ist, dass das ganze relativ schnell jetzt fertig werden muss. Der Hintergrund ist, dass ich 6 DC Motoren ansteuern und die Drehrichtung ändern muss. H. H. schrieb: > Und den armen BC548 nicht mit 120mA Basisstrom töten! Deswegen frage ich ob die Widerstände richtig ausgewählt sind :D
Kauf dir lieber einen Treiber-IC dafür, es erspart dir eine Menge Leid.
Markus W. schrieb: > Bau mal eine solche Schaltung in einem Simulator > virtuell auf Ich habe dafür die Website #https://www.falstad.com/circuit/circuitjs.html genommen, da ich mich dort sehr gut zurechtgefunden habe. Mit LT-Spice kam ich irgendwie nicht sehr weit :/
Stefan ⛄ F. schrieb: > Kauf dir lieber einen Treiber-IC dafür, es erspart dir eine Menge Leid. Kannst du mir da was emphelen für 24V/3A Motoren? :D
Malte S. schrieb: > Deswegen frage ich ob die Widerstände richtig ausgewählt sind :D Einfach die 200 Ohm mit den 20k gegeneinander tauschen. Das Problem mit der fehlenden Totzeit bleibt. Malte S. schrieb: > Das Problem ist, dass das ganze relativ schnell jetzt fertig werden muss Nimm bipolare Transistoren, dadurch entfällt die Konstruktion mit der Totzeit und du sparst die gegenseitige Verriegelung der beiden Eingänge. Allerdings hast du dann einen Spannungsverlust von 1,4V!
Michael M. schrieb: > Das Problem mit der fehlenden Totzeit bleibt. Das mit der Totzeit habe ich noch nicht so ganz verstanden. Werde eben die Widerstände tauschen und gucken ob der Transistor schaltet.
Der Transistor schaltet jetzt bei dem 20kOhm Widerstand. Jetzt ist nur die Sache mit den Warmen Mosfets. Gibt es eine Möglichkeit die Totzeit zu eliminieren? Oder reicht es einfach das ganze mit dicken Kühlkörpern zu betreiben?
Malte S. schrieb: > Das mit der Totzeit habe ich noch nicht so ganz verstanden. Zwischen dem Ausschalten des einen Transistors eines Zweigs, und dem Einschalten des anderen, muss eine Totzeit vergehen. Die kann durchaus im Bereich von vielen µs liegen, wenn man die Gates so lahm ansteuert wie du.
Malte S. schrieb: > Gibt es eine Möglichkeit > die Totzeit zu eliminieren? Nein, die muss sein. > Oder reicht es einfach das ganze mit dicken Kühlkörpern zu betreiben? Auto ohne Bremse, dafür dickere Stoßstange...
Malte S. schrieb: > Das Problem ist, dass das ganze relativ schnell jetzt fertig werden > muss. > Der Hintergrund ist, dass ich 6 DC Motoren ansteuern und die > Drehrichtung ändern muss. Also geht es Dir weniger darum H-Brücken bauen zu können als vielmehr 6 H-Brücken für 24VDC Nennspannung (vermutlich eines Werkzeugakkus? also eher etwas mehr und weniger) zu kriegen? Falls ja, nenne Motordaten und -typen, sowie die Anwendung.
Malte S. schrieb: > Kannst du mir da was emphelen für 24V/3A Motoren? :D Eine fertige, vollintegrierte H-Brücke! https://www.mikrocontroller.net/articles/H-Br%C3%BCcken_%C3%9Cbersicht "Allerdings braucht man für eine diskret aufgebaute H-Brücke deutlich mehr als 4 Transistoren, vor allem Know How! Man braucht Treiber, Pegelwandler und Schutzbeschaltungen. "
H. H. schrieb: > Zwischen dem Ausschalten des einen Transistors eines Zweigs, und dem > Einschalten des anderen, muss eine Totzeit vergehen. Die kann durchaus > im Bereich von vielen µs liegen, wenn man die Gates so lahm ansteuert > wie du. Okay das habe ich verstanden. falsificatione schrieb: > Falls ja, nenne Motordaten und -typen, sowie die Anwendung. Es ist 6 Motoren eines Roboters. Der ist sehr alt (1998) und hat ganz einfache DC Bürstenmotoren mit jeweils 24V/3A. Viel mehr findet man über die leider nicht heraus.
Falk B. schrieb: > vor allem Know How! Man braucht Treiber, > Pegelwandler und Schutzbeschaltungen. Danke für die Tipps aber ich glaube das bekomme ich nicht mehr Zeitlich hin. Muss diesen Monat fertig sein.
Malte S. schrieb: > falsificatione schrieb: >> Falls ja, nenne Motordaten und -typen, sowie die Anwendung. > > Es ist 6 Motoren eines Roboters. Der ist sehr alt (1998) und hat ganz > einfache DC Bürstenmotoren mit jeweils 24V/3A. Viel mehr findet man über > die leider nicht heraus. Dann brauchst Du normalerweise eine Sanftanlauframpe. Entweder aus der Ansteuerung (was ist die/soll die werden???) oder im Treiber integriert. Weil Du keinen Roboterarm willst der alles kaputtschlägt, wenn er (")versehentlich(") vollen Saft kriegt. Zumindest nehme ich das mal an. Aber zum Glück keine H-Brücken für den xfachen Anlaufstrom (sind eh selten für 24V, als fertige Module wohl noch seltener). Welche in Frage kämen, ist ohne Kenntnis der (An-)Steuerung aber sowieso nicht, und nicht mal dann sicher, zu sagen. Malte S. schrieb: > Muss diesen Monat fertig sein. "Unmögliches ..., Wunder ..." Rück halt mal raus was Du weißt.
falsificatione schrieb: > Rück halt mal raus was Du weißt. Ich hatte das hier schon in einem anderen Beitrag geschrieben. Ich habe Beckhoff Klemmen die mir ein Analoges Signal geben (0-10V) mit der ich die Geschwindigkeit der Motoren einstellen muss. Dank dem Analog Signal kann ich keine fertige H-Brücke nehmen, da die ein PWM Signal brauchen. Ich habe bei Amazon ein Board gefunden, was mit dem Analogen Signal etwas anfangen kann aber die Drehrichtung des Motor nicht ändern kann... Also war mein Plan dahinter eine ganz Simple H-Brücke zum ändern der Drehrichtung zu setzen. Das heißt ich habe als Versorgungsspannung 6-24V, damit gehe ich auf meine Schaltung und dann habe ich 24V Digital Ausgänge von den Beckhoff Klemmen mit denen ich die Motoren/Drehrichtung ansteuere. Anders weiß ich leider echt nicht wie ich das umsetzen soll. Mir fehlen leider wirklich die Elektronik Kenntnisse.
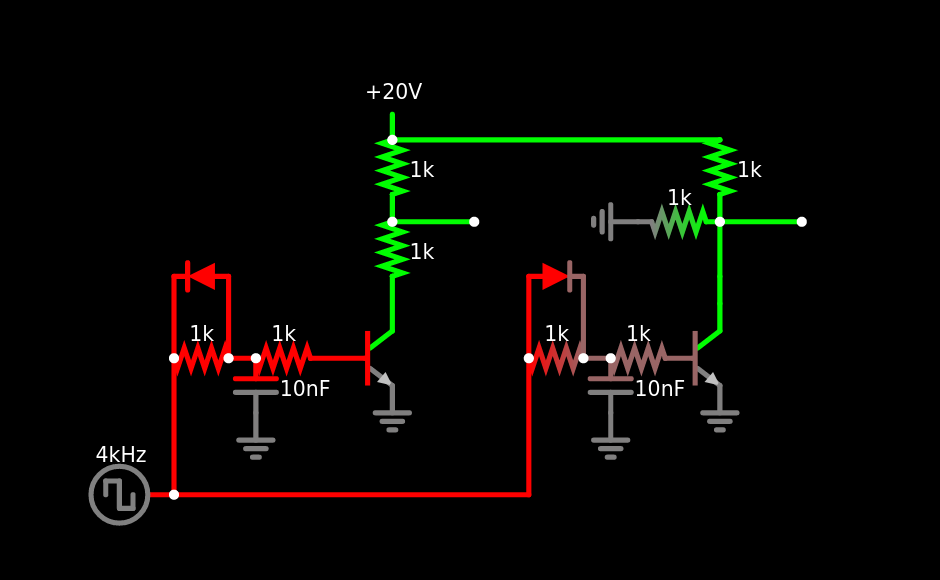
Es gibt noch ein Provisorium für einen weiteren Spannungsbereich. In dem Falle benötigst Du zwei Transistoren Q5.1 und Q5,2. https://www.falstad.com/circuit/circuitjs.html?ctz=CQAgjCAMB0l3BWcMBMcUHYMGZIA4UA2ATmIxAUgpABZsKBTAWjDACgAXcFPcQqsDRp8qAqOLBwQAEwYAzAIYBXADYdOIbGhGbshHWNHIqsxavUAncEJB4BN1ignw2VwcK3XhhYQJdXsPU0nQP0fZzhXEGJ9MH4QcLijSUirFBRhJJAUBFj4v1TsjCcs3Ez840gouJ0aXiyCqoB3L2DdfU9m1sSbOyg2FtCEjyC+rvdwMBKHGy6hx3buXjmgqd552YHovIEeAy26nUT8rZydopKTwchyqi0BK+yMnXThDNEtmqya9-6W1+yNCoLH0v3GvQExCcYy2Qz62Dwwhh0mGkycMTR2Rk8mUajYKLKmMwJSmWNMuPUg1Gd1WpK6xKJxX210ypMJDS2GIWXMeiVJxw+AHNWmAMLEHFDxFVhfMxYswJKPkA Sehr gerade, die Dioden sind falsch herum. Es fehlt noch ein kleiner Kondensator über dem anderen Widerstand in Reihe mit einem kleinem Widerstand. Idee dahinter ist, dass eine Schaltrichtung künstlich verlängert wird und zwar jeweils das Einschalten des Mosfet.
Dieter schrieb: > Es gibt noch ein Provisorium für einen weiteren Spannungsbereich. In dem > Falle benötigst Du zwei Transistoren Q5.1 und Q5,2. Tut mir leid aber da weiß ich gar nicht was du meinst :(
Malte S. schrieb: > Ich hatte das hier schon in einem anderen Beitrag geschrieben. > > Ich habe Beckhoff Klemmen die mir ein Analoges Signal geben (0-10V) mit > der ich die Geschwindigkeit der Motoren einstellen muss. Dank dem Analog > Signal kann ich keine fertige H-Brücke nehmen, da die ein PWM Signal > brauchen. In der Tat. Aber es gibt Konverter von Spannung zu PWM. > Ich habe bei Amazon ein Board gefunden, was mit dem Analogen Signal > etwas anfangen kann aber die Drehrichtung des Motor nicht ändern kann... > Also war mein Plan dahinter eine ganz Simple H-Brücke zum ändern der > Drehrichtung zu setzen. Eine GANZ simple H-Brücke besteht aus 2 Relais mit Wechslerkontakten. Die kriegt auch jemand wie du hin. google Polwender Relais > Anders weiß ich leider echt nicht wie ich das umsetzen soll. Mir fehlen > leider wirklich die Elektronik Kenntnisse. Und warum machst du das dann?
Falk B. schrieb: > Und warum machst du das dann? Ist ein Schulprojekt. Falk B. schrieb: > Eine GANZ simple H-Brücke besteht aus 2 Relais mit Wechslerkontakten. Das bekomme ich hin, aber das möchte unser Lehrer nicht -.- Falk B. schrieb: > Aber es gibt Konverter von Spannung zu PWM. Der LTC6992 wurde mir hier schon vorgeschlagen, nur bekomme ich den nicht bei Conrad etc. Und dann müsste ich mich damit wieder auseinandersetzen wie man den mit einem PWM Board verbindet... Bin froh das das Amazon Board funktioniert.
Malte S. schrieb: > Der LTC6992 wurde mir hier schon vorgeschlagen, nur bekomme ich den > nicht bei Conrad etc. Nützt dir bei deinem Kenntnisstand auch wenig. DU kannst bestenfalls fertige Board verkabeln. > Und dann müsste ich mich damit wieder auseinandersetzen wie man den mit > einem PWM Board verbindet... Bin froh das das Amazon Board funktioniert. https://www.renhotecic.com/Voltage-To-PWM-Converter-Module-0-5V-0-10V-To-0-100-0050684?gclid=Cj0KCQjwmuiTBhDoARIsAPiv6L9cf6bWfYZwo-PfoYOMbiwCqksYl16HKpNc6FUWhUh8aQgeUVwzG2caAuS2EALw_wcB Gibt es sicher auch noch andere.
Angehängte Dateien:
Malte S. schrieb: > Es ist 6 Motoren eines Roboters. Der ist sehr alt (1998) und hat ganz > einfache DC Bürstenmotoren mit jeweils 24V/3A. Viel mehr findet man über > die leider nicht heraus. Das ist schon einiges. Es bedeutet z.B. dass du da über ein PWM-Tastverhältnis die Geschwindigkeit regeln können musst. Denn sonst wird sich der Roboter nur immer ruckartig mit Vollgas in jede Richtung bewegen. Wie willst du denn diese Endstufe später mal ansteuern? Malte S. schrieb: > Ich kenne mich leider nicht gut genug aus mit Elektronik, daher bitte > ich hier um Unterstützung. Eines vorneweg: du hast echt Glück, denn du bist nicht der Erste, der diese Aufgabe lösen muss. Du kannst also auf hunderte oder gar tausende funktionierende und erprobte Schaltungen zurückgreifen. Du musst eben nicht aus dem Urschleim der Prinzipschaltungen selber eine neue Endstufe entwickeln und jeden denkbaren Fehler selber machen. Ich mache das in solchen Fällen immer so, dass ich etwas Fertiges suche, das die Aufgabe löst. Und dann schau ich mir genau an, wie der Entwickler vor mir die Aufgabe gelöst hat. Wenn mir der Ansatz zusagt, nehme ich das als Basis für meine Lösung. Oder kurz: meinst du ernsthaft, du kannst so eine Roboteransteuerung, die vor dir Spezialisten in tausenden von Ingenieursstunden entwickelt haben, so nebenher ohne Elektronikkenntnisse neu aufziehen?
Malte S. schrieb: > Der ist sehr alt (1998) und hat ganz > einfache DC Bürstenmotoren mit jeweils 24V/3A. Ein 3A Motor zieht gerne >30A Anlaufstrom, einen nur 3A MOSFET reißt es dann.
Lothar M. schrieb: > Oder kurz: meinst du ernsthaft, du kannst so eine Roboteransteuerung, > die vor dir Spezialisten in tausenden von Ingenieursstunden entwickelt > haben, so nebenher ohne Elektronikkenntnisse neu aufziehen? Genau das meine ich eben nicht. Aber unser Lehrer verlangt es von uns... Aber an sich sollen sich einfach nur die Achsen bewegen. Es ist auch egal ob das Ruckartig anläuft oder mal übers Ziel hinaus fährt. Ich würde auch gerne auf etwas fertiges zurückgreifen aber ich habe überhaupt nichts gefunden was mit den 0-10V UND ändern der Drehrichtung zurrecht kommt.
Malte S. schrieb: >> Kauf dir lieber einen Treiber-IC dafür, es erspart dir eine Menge Leid. > Kannst du mir da was empfhelen für 24V/3A Motoren? Leider nicht. Bisher kam ich gut mit fertigen Modulen aus, musste mich daher mit losen IC noch nicht beschäftigen. > Aber unser Lehrer verlangt es von uns... Dann sage ihn, dass er zu viel von euch verlangt. Wenn er anderer Meinung ist, kann er ja mal einen Mustervorschlag zeigen. Vielleicht klärt sich dadurch ein Missverständnis auf.
Malte S. schrieb: > Das Problem ist, dass das ganze relativ schnell jetzt fertig werden > muss. Dann verwende doch fertige Vollbrückentreiber. Z.B. L6205, der sogar 2 H-Brücken enthält. Die sind fast unkaputtbar. Malte S. schrieb: > etwas fertiges zurückgreifen aber ich habe > überhaupt nichts gefunden was mit den 0-10V UND ändern der Drehrichtung > zurrecht kommt. Naja, irgendwas musst Du schon noch selber bauen. L6205, L293, L6285, L298 und viele andere mehr erwarten digitale Ansteuersignale. Die machen Dir eine super robuste H-Brücke und nicht mehr.
Malte S. schrieb: > Ich würde auch gerne auf etwas fertiges zurückgreifen aber ich habe > überhaupt nichts gefunden was mit den 0-10V UND ändern der Drehrichtung > zurrecht kommt. Dann hast du falsch gesucht. Probiers mit sowas: https://www.ebay.de/itm/363782996314
Lothar M. schrieb: > Probiers mit sowas: > https://www.ebay.de/itm/363782996314 So wie das aussieht, benötigt es auch ein PWM Signal um die Geschwindigkeit einzustellen. Stefan ⛄ F. schrieb: > Wenn er anderer Meinung ist, kann er ja mal einen Mustervorschlag zeigen. Keine Chance. Der Lehrer weiß selber nicht wie es geht.
Wird im Prinzip so etwas benötigt? https://makermotor.com/easer-25-h-bridge-brushed-dc-10-40v-motor-driver-controller-esc-25a-rc-pwm-analog-inputs/
Lothar M. schrieb: > Probiers mit sowas: > https://www.ebay.de/itm/363782996314 Wo entnimmst du dem Angebotstext, Zitat: Besonderheiten: MW/UKW Radio irgendwelche Hinweise zur intendierten Funktion? Was das Ding macht, kann man doch nur raten. Über 10V-Steuerspannung steht da nichts. Die Drehrichtung wird mit einem externen Schalter gewählt. Ich habe den Eindruck, das hat sich der TO anders vorgestellt.
Malte S. schrieb: > So wie das aussieht, benötigt es auch ein PWM Signal um die > Geschwindigkeit einzustellen.Müsste man messen, was da amPoti passiert. Aber was mich nachdenklich macht ist das hier: https://www.ebay.de/itm/294135292587 Ich traue den Chinesen echt zu, dass die zur Richtungsumschaltung zwei Relais eingebaut haben und keine Vollbrücke. Dieter schrieb: > Wird im Prinzip so etwas benötigt? Ich würde dann eher sowas nehmen und mit der nötigen PWM ansteuern: https://makermotor.com/pn00218-cyt7-cytron-20a-6-30v-dc-motor-driver-md20a/ Denn da sitzt sicher sowieso irgendwo ein µC und steuert das Ganze. Und der kann dann leicht die PWM erzeugen. Und wenn da noch kein µC sitzt, dann kann man einen dranbasteln, der die Analogspannung einliest und in eine passende PWM umwandelt. Das ist allemal einfacher "aus dem Stand" zu realisieren als die komplette H-Brücke. Malte S. schrieb: > Der Lehrer weiß selber nicht wie es geht. Schon etwas, naja, seltsam: einer, der es machen soll, aber nicht weiß was und wie. Und einer, der es ihm auch nicht sagen kann... Dir bleibt da nichts anderes als fertige Module zu kaufen und paasend anzusteuern. Hast du dir mal angeschaut, was da so drauf ist? Wenn es mit weniger Bauteilen ginge, dann wären weniger Bauteile drauf.
Lothar M. schrieb: > Malte S. schrieb: >> So wie das aussieht, benötigt es auch ein PWM Signal um die >> Geschwindigkeit einzustellen.Müsste man messen, was da amPoti passiert. Aber was > mich nachdenklich macht ist das hier: > https://www.ebay.de/itm/294135292587 > > Ich traue den Chinesen echt zu, dass die zur Richtungsumschaltung zwei > Relais eingebaut haben und keine Vollbrücke. Die Relais sind klar zu sehen und die Ansteuerung ist doch der gleiche Mist wie deine andere Ebay-Empfehlung: unspezifiziertes Poti, steht da auch so im text: Speed regulation method: Potentiometer. Wo interpretierst du da den 10V-Eingang hinein? Reines Wunschdenken!
Dieter R. schrieb: > die Ansteuerung ist doch der gleiche Mist wie deine andere Ebay-Empfehlung Ja, so ist es. Ich meinte, das mit dem Hinweis auf die natürlich leicht erkennbaren Relais gesagt zu haben. Falls das nicht rübergekommen ist, dann ein Hinweis an @Malte S. (teebow): kauf die EBAY-Dinger nicht. Trotzdem habe ich noch was: die Suche nach BTS7960 findet dann Vollbrückenmodule, die in Richtung des eigentlichen Ansatzes gehen: "Ich möchte eine funktionierende H-Brücke bauen." https://www.makershop.de/module/motosteuerung/double-bts7960/ Die kann man natürlich nicht mit 0-10V ansteuern, sondern man muss die Brücken selber korrekt ansteuern, aber der Witz ist: dafür gibt es in der Arduino-Ecke wieder jede Menge Demos. Und es gibt auch eine Anleitung, wie man aus dem Ding mit einem Arduino eine analoge Motoransteuerung basteln könnte.
Lothar M. schrieb: > Und es gibt auch eine Anleitung, wie man aus dem Ding mit einem Arduino eine > analoge Motoransteuerung basteln könnte. Das Board sieht ganz gut aus. Allerdings bin ich wieder bei dem Problem das ich dafür einen Arduino einsetzen muss. Damit wäre ich vermutlich schon lange fertig gewesen aber ich muss leider ausschließlich Beckhoff benutzen... Ich weiß auch nicht was sich unser Lehrer dabei gedacht hat... Kleines Update: Ich habe jetzt ein Board mit den neuen Widerständen gelötet und dicke Kühlkörper an die Mosfets gepackt. Es funktioniert. So wie ich es mir gewünscht habe. Was kann man gegen die fehlende Totzeit unternehmen? Oder soll ich einfach hoffen das die Mosfets das lange mitmachen?
Malte S. schrieb: > ich muss leider ausschließlich Beckhoff > benutzen... Gibt's die Randbedingungen auch mal in geraffter Form oder immer noch mal eine angebissene Salamischeibe dazu? Was ist überhaupt die Grundlage? Es gibt offenbar einen Roboter von 1998, aber der ist unvollständig. Und der hat Motoren, die angesteuert werden sollen. Was für ein Roboter? Typ, Foto? Offenbar wurde er ja schon mal angesteuert. Womit, was ist davon noch vorhanden? Was von Beckhoff? ist das Ganze eine Spende von Beckhoff oder von einem Beckhoff-Kunden? Vielleicht solltet ihr Rat direkt bei Beckhoff einholen? Was ist das Ziel des Projekts und die Intention eures Lehrers, der nach deiner Wahrnehmung überfordert ist? Vielleicht bist du aber bloß nicht imstande, die Projektziele richtig darzustellen? Fragen über Fragen und bisher bloß Stückwerk, bei dem nicht erkennbar ist, wie sich das zu einem erfolgreichen Projektabschluss zusammenfügen soll.
Malte S. schrieb: > Damit wäre ich vermutlich schon lange fertig gewesen aber ich muss > leider ausschließlich Beckhoff benutzen... Ja, einfacher gehts ja dann wohl kaum, da hat Beckhoff schon was Fertiges: https://www.beckhoff.com/de-de/produkte/i-o/busklemmen/kl2xxx-digital-ausgang/kl2552.html Mit ein wenig Glück tuts auch die: https://www.beckhoff.com/de-de/produkte/i-o/ethercat-klemmen/el7xxx-kompakte-antriebstechnik/el7342.html Malte S. schrieb: > Es funktioniert. So wie ich es mir gewünscht habe. > Was kann man gegen die fehlende Totzeit unternehmen? Nicht allzu oft Schalten. Denn wie gesagt: das Umschalten bringt Probleme. Wenn du also z.B. wegen einer Drehzahlreduzierung PWM machen willst, dann klappert die Mühle am rauchenden Bach. > Oder soll ich einfach hoffen Ja, auch eine Möglichkeit ;-)
Beitrag #7062487 wurde von einem Moderator gelöscht.
Malte S. schrieb: > Was kann man gegen die fehlende Totzeit unternehmen? So wie dort skizziert (hier nur für die linke Seite der H-Brücke, d.h. hier wirst Du insgesamt vier Ansteuertransistoren benötigen. Die Gates der Mosfet sind hier nicht mehr direkt miteinander verbunden): Dieter schrieb: > Bei den Werten sieht man den Versatz. Jeweils mit den Dioden dafür sorgen, dass die Einschaltung verzögert wird und über die Dioden die Abschaltung die Verzögerung überbrückt wird. Aber Du hast noch viel zu wenig über Deine Ansteuerung verraten. Aktuell scheint es so zu sein, dass die Geschwindigkeit der Motoren über die Spannung von 6 bis 24V bestimmt wird. Die Brücke wird geschaltet für die Drehrichtung.
Dieter R. schrieb: > Gibt's die Randbedingungen auch mal in geraffter Form Okay, hier einmal alle Infos zum Projekt: Der Roboter ist ein Mitsubishi Movemaster EX RV-M1. Es gibt keine Steuerung oder Fernbedienung (vermutlich kaputt oder weg geworfen, mehr weiß man nicht). Deshalb die Aufgabenstellung: Überlegen wie man mit Beckhoff Komponenten die Achsen des Robbys bewegen kann. Dafür stehen uns folgendes zur Verfügung: 3 x EL4102 (Analog Ausgang 0-10V) 3 x EL3062 (Analog Eingang 0-10V) 24 x 24V Digital Ausgänge 24 x 24V Digital Eingänge mehr bietet uns die Schule nicht... Die Motoren sind wie schon erwähnt 24V DC / 3A (der vom Greifer wird weniger Ampere haben). Dann gibt es noch 2 x 12V Bremsen die die Achsen in Position halten (ist kein Problem hat ein Kollege schon übernommen). Die Auswertung der Geber macht wer anders. Der meint das läuft. Ich habe das Thema der Ansteuerung der Motoren übernommen und habe aufgrund mangelnder Beckhoff Hardware noch nichts zustande gebracht.
Dieter schrieb: > So wie dort skizziert (hier nur für die linke Seite der H-Brücke, d.h. > hier wirst Du insgesamt vier Ansteuertransistoren benötigen. Werde es in einer anderen Version meines Boards versuchen. Jetzt löte ich erstmal 6 von dem was ich hier gezeigt habe und hoffe das mein Lehrer sich damit zufrieden gibt.
Malte S. schrieb: > Deshalb die Aufgabenstellung: Überlegen wie man mit Beckhoff Komponenten > die Achsen des Robbys bewegen kann. Dafür stehen uns folgendes zur > Verfügung: > 3 x EL4102 (Analog Ausgang 0-10V) > 3 x EL3062 (Analog Eingang 0-10V) > 24 x 24V Digital Ausgänge > 24 x 24V Digital Eingänge > > mehr bietet uns die Schule nicht... Bitte nochmal genau für Leute wie mich, die nicht so schnell begreifen: > Ich habe das Thema der Ansteuerung der Motoren übernommen und habe > aufgrund mangelnder Beckhoff Hardware noch nichts zustande gebracht. Das heißt, ihr sollt ZUSÄTZLICHE Beckhoff-Komponenten verwenden (so hattest du das weiter oben schon mal geschrieben), die aber noch beschafft werden müssen? Wozu dann deine selbstgebaute H-Brücke? Die ist nicht von Beckhoff. Oder heißt das jetzt endgültig, dass die von dir genannten Komponenten da sind und alles weitere müsst ihr SELBST bauen? Kaufen geht aber nicht, weil das nicht von Beckhoff wäre? Also auch keine China-Baugruppen? Und woran sind die von dir genannten I/O-Baugruppen angeschlossen? Alleine tun die ja nichts. > Jetzt löte > ich erstmal 6 von dem was ich hier gezeigt habe und hoffe das mein > Lehrer sich damit zufrieden gibt. Nachdem klar ist, dass das keine funktionierende Lösung ergibt - jedenfalls nicht, wenn du PWM benötigst? Hier: https://manualzz.com/doc/8635155/mitsubishi-rv-m1-instruction-manual gibt's das Manual. Da steht, dass der Antrieb mit DC-Servomotoren erfolgt. Mich beschleicht der Verdacht, dass es mit deiner H-Brücke alleine nicht getan ist.
Malte S. schrieb: > 24 x 24V Digital Ausgänge D.h. es wäre zwar denkbar jeden Mosfet einzeln anzusteuern, aber bei 6 Motoren jeweils 4 MOSFET, wären dann schon alle 24 Ausgänge verbraucht. Hier ist übrigens noch eine etwas einfachere Schaltung, wie Du das mit den MOSFET noch einfacher hinbekommst, dass das mit der Totzeit besser wird: https://www.mikrocontroller.net/attachment/6213/h-bruecke.jpg Ist aus dem Thread: Beitrag "Diskrete H-Brücke" Besser geeignet wären aber diese Ansteuerschaltungen: http://dieelektronikerseite.de/Pics/Lections/H-Bruecke%20-%20Die%20Andersherum-Schaltung%20S07.GIF https://www.homofaciens.de/bilder/technik/h-bridge_023_400x225.gif
{kind=link}
{kind=link}
{kind=link}
Ja, und dann dies hier, eben gefunden: Beitrag "Motorsteuerung mit Analog Karte einstellen" Du bist da jetzt mindestens seit 15.03. dran, also seit 8 Wochen. In gut zwei Wochen soll es fertig sein, aber es gibt noch nicht mal ein tragfähiges Konzept. Software muss dann ja wohl auch noch geschrieben werden!? Mein Ratschlag wäre, ganz ehrlich mit dem Lehrer darüber zu sprechen und ihn fragen, was ER dir als Ausweg aufzeigen kann bzw. welche Hilfestellung er dir geben kann. Jetzt, bevor es endgültig zu spät ist. Man kann ruhig mal sagen, ich komme mit dem Thema nicht zurecht.
Anbei noch ein paar: https://www.homofaciens.de/bilder/technik/h-bridge_016_400x281.gif Das ginge auch noch mit Mosfet, statt der Transistoren: https://www.mikrocontroller.net/attachment/5202/hbruecke.GIF https://www.mikrocontroller.net/attachment/6203/H-Brigde.gif
{kind=link}
{kind=link}
{kind=link}
Dieter R. schrieb: > Jetzt, bevor es endgültig zu spät ist. Bei den Links des Posts 12.05.2022 22:56 sind nun ein paar einfache Schaltungen dabei, mit denen er noch zum Ziel käme. Diese Schaltbilder nimm mit, wenn Du mit dem Lehrer sprichst.
Dieter R. schrieb: > Das heißt, ihr sollt ZUSÄTZLICHE Beckhoff-Komponenten verwenden Es stehen uns nur die Beckhoff Komponenten zur verfügung die ich aufgelistet habe. Alles andere ist unser Problem. Dieter R. schrieb: > Oder heißt das jetzt endgültig, dass die von dir genannten Komponenten > da sind und alles weitere müsst ihr SELBST bauen? Genau so ist es. Dieter R. schrieb: > Da steht, dass der Antrieb mit DC-Servomotoren erfolgt. Muss eine andere Version sein. Jeder Motor vom Robby hat nur 2 Adern und mit einer 9V Batterie haben wir geguckt ob die Achsen sich bewegen lassen. Dieter R. schrieb: > Software muss dann ja wohl auch noch geschrieben > werden!? Mein Ratschlag wäre, ganz ehrlich mit dem Lehrer darüber zu > sprechen und ihn fragen, was ER dir als Ausweg aufzeigen kann bzw. Die Software habe ich soweit schon fertig. Das funktioniert auch schon soweit, dass wir die Hardware anschließen könnten. Mit dem Lehrer kann man leider nicht sprechen. Der ist Resistent gegen jegliche Art von Kommunikation...
Ich habe mir die ganzen Schaltungen die du hier verlinkt hast angeguckt. Vielen dank dafür! Ich werde bei Reichelt wohl die Teile dafür bestellen und dann müssen meine Kollegen und ich wohl ein langes Löt-Wochenende einleiten :D Edit: Wobei ich leider nicht weiß welche.
Malte S. schrieb: > Edit: Wobei ich leider nicht weiß welche. Vielleicht solltest Du die Schaltung Deiner Wahl im Simulator wwww.falstad.com vorher aufbauen und dann noch die Bauteile anpassen, dass diese sowohl bei 6V und 24V funktioniert, denn das war eine Deiner Anforderungen. Vor dem Bestellen wäre vielleicht sinnvoll zu fragen, ob die Halbleiter passen oder nicht. Gerade bei Deiner Schaltung die falschen Halbleiter bestellt, gibt schnell viel Elektronikschrott.
Malte S. schrieb: > Edit: Wobei ich leider nicht weiß welche. Ja. Dein Ansatz ist grundfalsch. Estmal, was ist das für eine Schule, welcher Level? Ist der Lehrer eigentlich der Sportlehrer der den Robotarm im Keller gefunden hat? Du möchtest einen PWM-Drehzahlsteller mit Vollbrücke und Ansteuerung per 0..10V bauen. Plus Eingang für die Drehrichtung. Die Vollbrücke bekommst du auf die Schnelle nicht hin, das ist mal Fakt. Es kommen ja noch Dinge dazu über die noch garnicht gesprochen wurde, Überstromabschaltung, Übertemperatur z.B. Der Robbiarm ist immerhin durchaus gefählich, kann schonmal gequetschte Gliedmaßen geben wenn ein Mosfet durchlegiert und ein Motor "durchdreht". Auch der Profi wird sich erstmal nach fertigen Brücken-IC's umschauen, gibt einiges. Allerdings sind die Dinger wahlweise derzeit nicht lieferbar oder in bastleruntauglichen Gehäusen untergebracht. Verfügbar sind (hoffentlich noch) ferige "Maker-" Module, z.B. Sowas: https://www.makershop.de/module/motosteuerung/double-bts7960/ (erster Googletreffer, weitersuchen) Alle Vollbrücken wollen mit einem PWM-Signal gefüttert werden. Das machst du z.B. mit einem Atmega oder einem Attiny. Der kann das 0..10V Signal in ein PWM-Signal umwandeln. (über einen Spannungsteiler natürlich) Rampen z.B. kann er auch schonmal erledigen Mit geschickter Programmierung kann ein Atmega328 alle Achsen versorgen. Natürlich läßt sich ein Arduino dafür verwenden. Vermutlich ist das mit fertigen Bibleotheken in "Minuten" zusammen-"gecodet". Erkläre deinem Lehrer daß heute in jedem Toaster ein Mikrocontroller steckt und daß ein Drehzahlsteller ohne Rechenknecht anno 2022 undenkbar ist. Zur Info, fertige Antriebsregler sehen z.B. so aus: https://www.micontrol.de/de/products/devices/mcdsa-b60 Wie soll das weiterlaufen? Beckhoff bietet Softwarebausteine (Codesys) für Robotik und CNC an. Wollt ihr sowas nutzen? Auf jeden Fall muß eine Lagereglung eingebaut werden. Dazu muß die SPS die Inkementalgebersignale auswerten, das bedingt passende Einganksklemmen. Und es müssen entsprechende (Software-) Reglebausteine eingesetzt und parametriert werden. Grade im Schulumfeld solltet ihr euch Gedanken um die Sicherheit machen. (Nothalt, Lichtschranken, Käfig..) Das gibt es viel Stoff zu lernen. Ein Video von der neuen Teslafertigung mit viel Roboter dazu: https://www.youtube.com/watch?v=MlxGAgEUJx4 Uwe
Uwe B. schrieb: > Alle Vollbrücken wollen mit einem PWM-Signal gefüttert werden. Das kann die Beckhoff SPS natürlich auch direkt ausgeben, entsprechende Busklemme vorausgesetzt. Uwe
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.