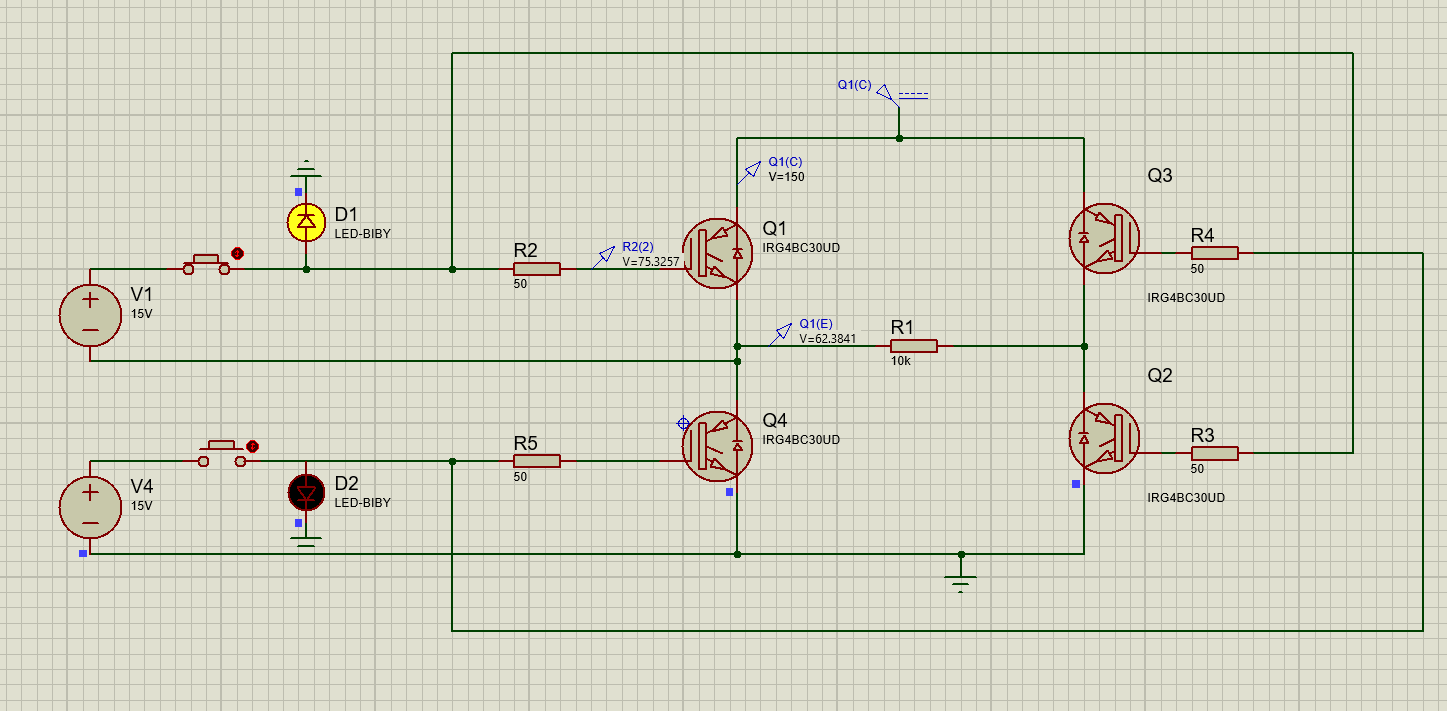
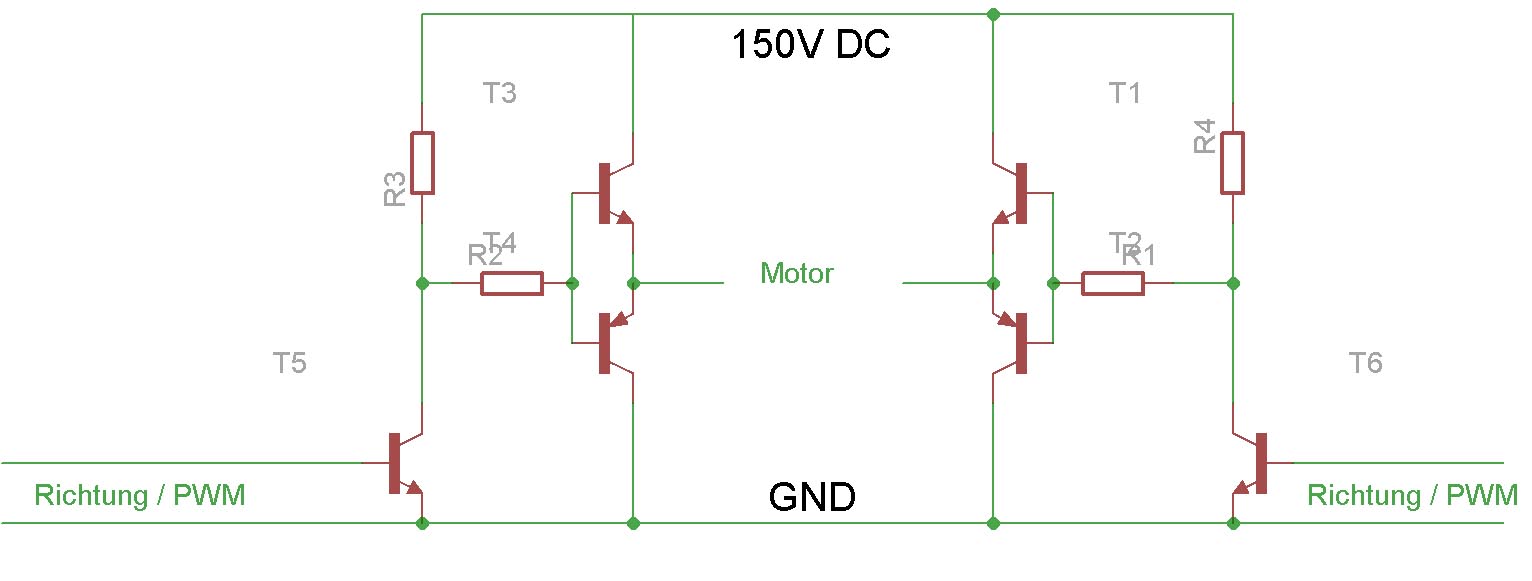
Hallo zusammen, ich wollte einen Steuerkreis eines Gleichstromgenerators entwerfen. Dieser sollte mithilfe von 4 IGBT (H-Brücke) simuliert sein. 2 Knöpfe, einer für die Rotation nach Rechts (Q1,Q2) und einer für Links (Q3,Q4). Der Generator wird mit einer Spannung von ca. 150V angetrieben. Das Problem ist, dass es am Ausgang immer die Hälfte der angelegte Spannung rauskommt (~62V ; Bild), was dann hier kein Sinn macht! Wie könnte ich bitte dann das hier lösen ? Viele Grüße Hedi
Angehängte Dateien:
-

Testing.png
16 KB
Der Denkfehler liebt hauptsächlich bei Q3. Auch für den gilt, was er zwischen Gate und Source sieht, um durchzusteuern. Schau dir nun die Spannungsquelle an seinem Gate an und du wirst den Fehler sehen. Q4 hingegen ist immer durchgesteuert. Selbst wenn die Spannung am Gate null ist, liegt sie ja auf dem Niveau des negativen Anschluss der Gatequelle. Am einfachsten ist die Lösung, wenn du die oberen MOSFet durch P-Kanal ersetzt. Wenn das nicht geht, braucht jede Seite ihre eigenen Spannungsquellen. (im realen Leben dann Gatetreiber mit Ladungspumpe oder DC/DC Wandler).
Danke Matthias für deine Antwort. Ich habe mir das nochmal angepasst, also beim Q1 und Q3 jeweils eine Quelle eingesetzt. Das ergibt sich aber immer noch nur die Hälfte der Spannung raus. Das Ding ist ich muss in meinem Projekt lieber IGBT verwenden. Sollte ich viellecht einen Optocoppler vor dem Transisor einsetzen !?
Einen IGBT mit 165V ansteuern? Wie wird wieder ausgeschaltet? Der Plan hat noch zu viele Fehler.
Hedi schrieb: > also beim Q1 und Q3 jeweils eine > Quelle eingesetzt. Das ergibt sich aber immer noch nur die Hälfte der > Spannung raus. Du baust immer noch einen fetten Kurzschluss, denn Q2 bleibt immer durchgeschaltet.
Angehängte Dateien:
-

Halbbruecke.jpg
56 KB
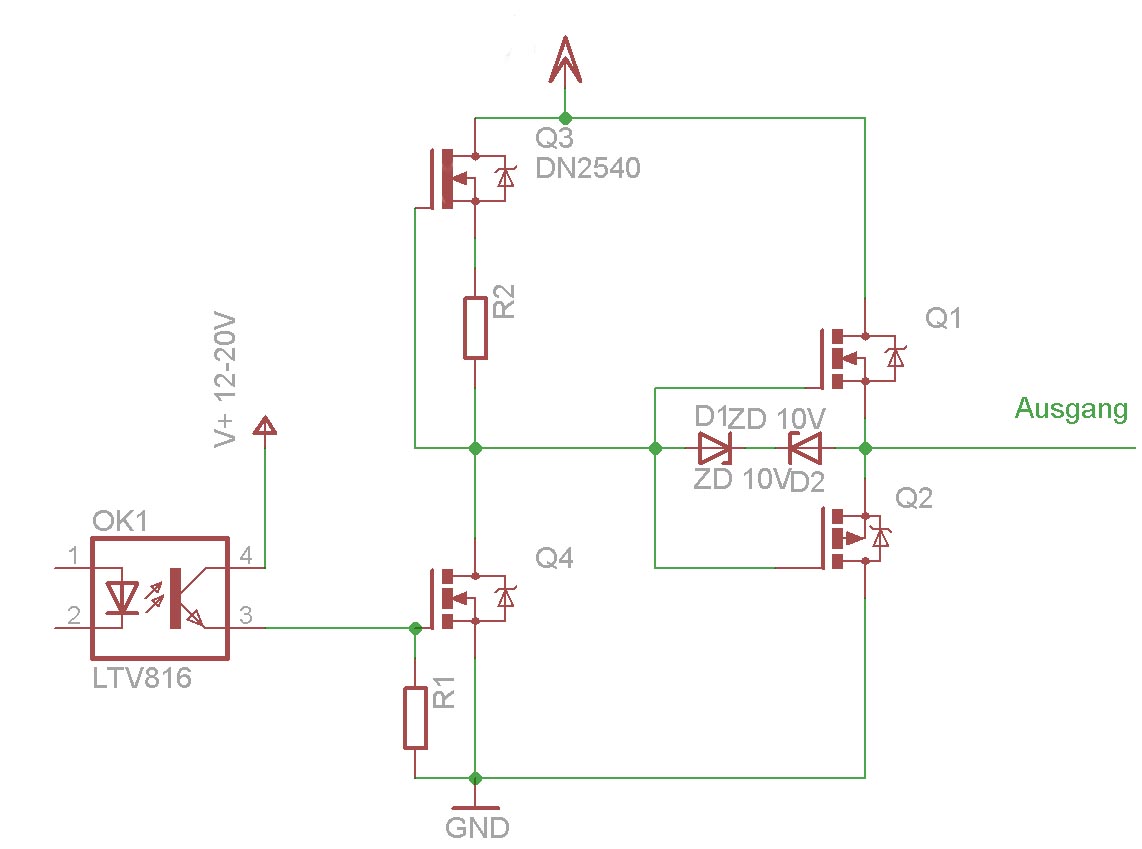
Matthias S. schrieb: > Am einfachsten ist die Lösung, wenn du die oberen MOSFet durch P-Kanal > ersetzt. Hallo, Matthias Vorschlag ist deutlich sicherer, als Deine Schaltung. Werden versehentlich Q1 und Q2 gleichzeitig durchgeschaltet….. Diese Schaltung soll das Prinzip veranschaulichen. Q3 mit R2 arbeitet als Konstantstromquelle. Als OK kannst Du auch den TLP 250 nehmen. Es mag sein, das nicht alle Symbole richtig gezeichnet sind, aber die Funktion sollte erkennbar sein. Die zweite Seite der Brücke würde genauso aussehen. Vielleicht musst Du zwischen Q4 und Q1/Q2 noch einen Widerstand setzen. Gruß Carsten
Allerdings ist dem TE später eingefallen, das es ja nun doch IGBT sein sollen. Da P-IGBT wirklich schlecht zu bekommen sind, wird es wohl doch auf anständige Gatetreiber hinauslaufen.
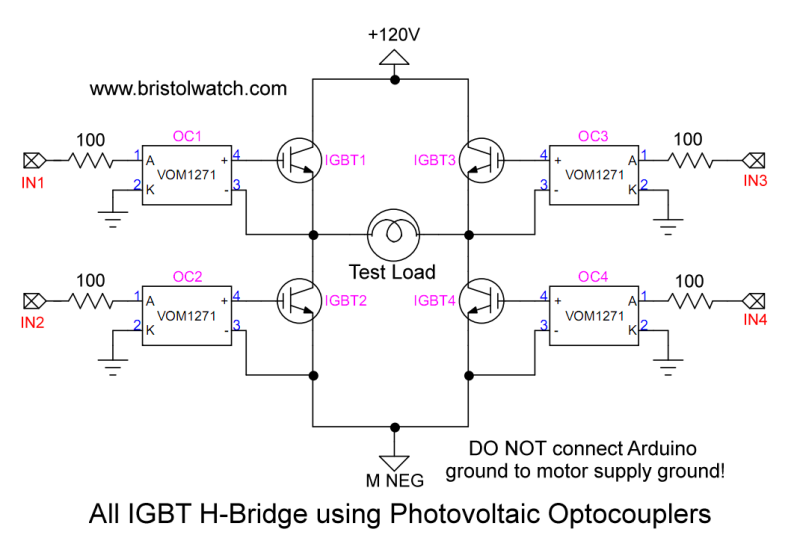
Eine gute Möglickeit ist der Einsatz von Photovoltaik Kopplern: https://www.bristolwatch.com/ele4/igbt_h_bridge/hb1.png Die Eingänge sind jetzt alle GND bezogen und lassen sich z.B. über kreuz verbinden.
Hedi schrieb: > ich wollte einen Steuerkreis eines Gleichstromgenerators entwerfen. Meine Vorgehensweise bei solchen Sachen: ich beschaffe mir ein Gerät, das funktioniert und schaue mir an, wie das aufgebaut ist. Demn diese Prinzipschaltung, die du da zum Leben erwecken willst, funktioniert wie alle Prinzipschaltungen eben nur im Prinzip, also wenn du ideale potentialfreie Schalter hast, die zudem in beide Richtungen sperren bzw. ideal leiten. Weil du aber keine solchen Schalter, sondern Transistoren hast, musst du deren Eigenheiten und Einschränkungen berücksichtigen. Dazu sind elementare Grundlagen zu diesen Bauteilen nötig.
Angehängte Dateien:
-

Bild_1.png
14 KB -

Bild_2.png
19 KB
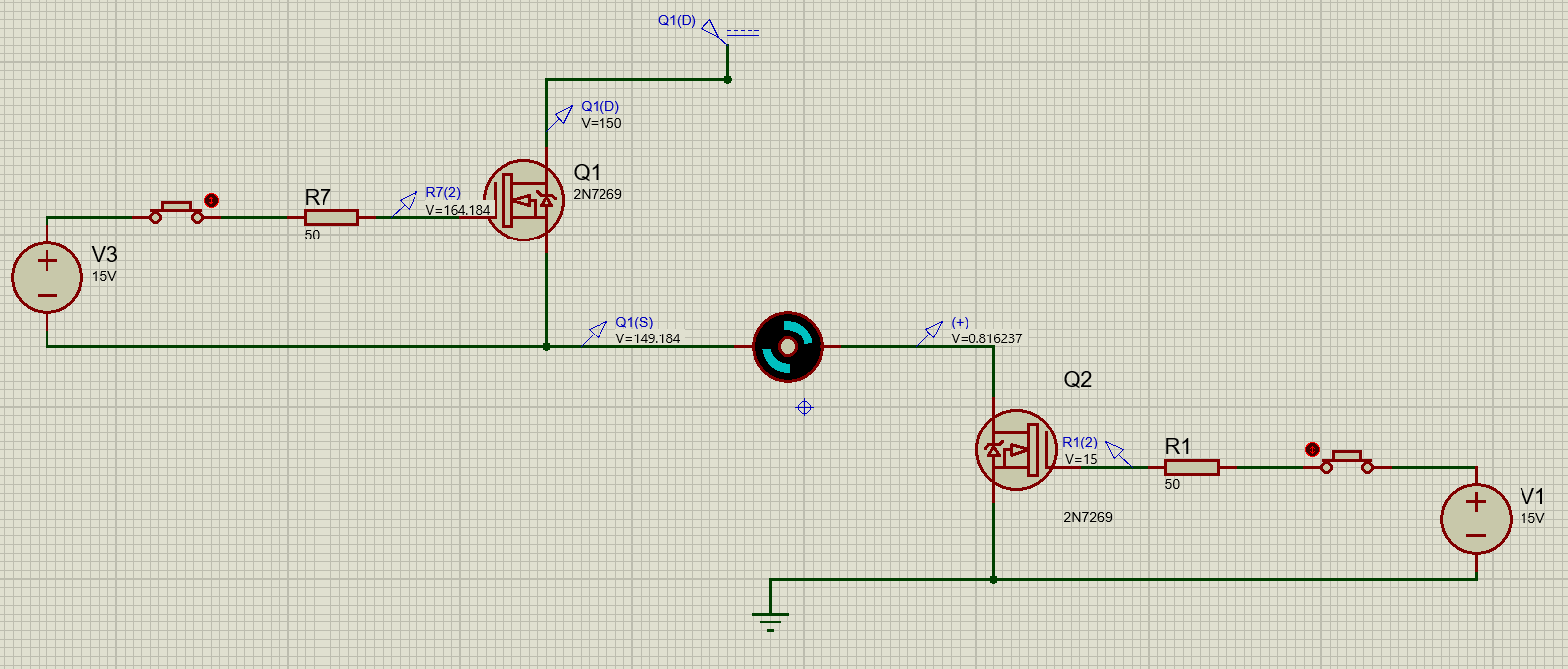
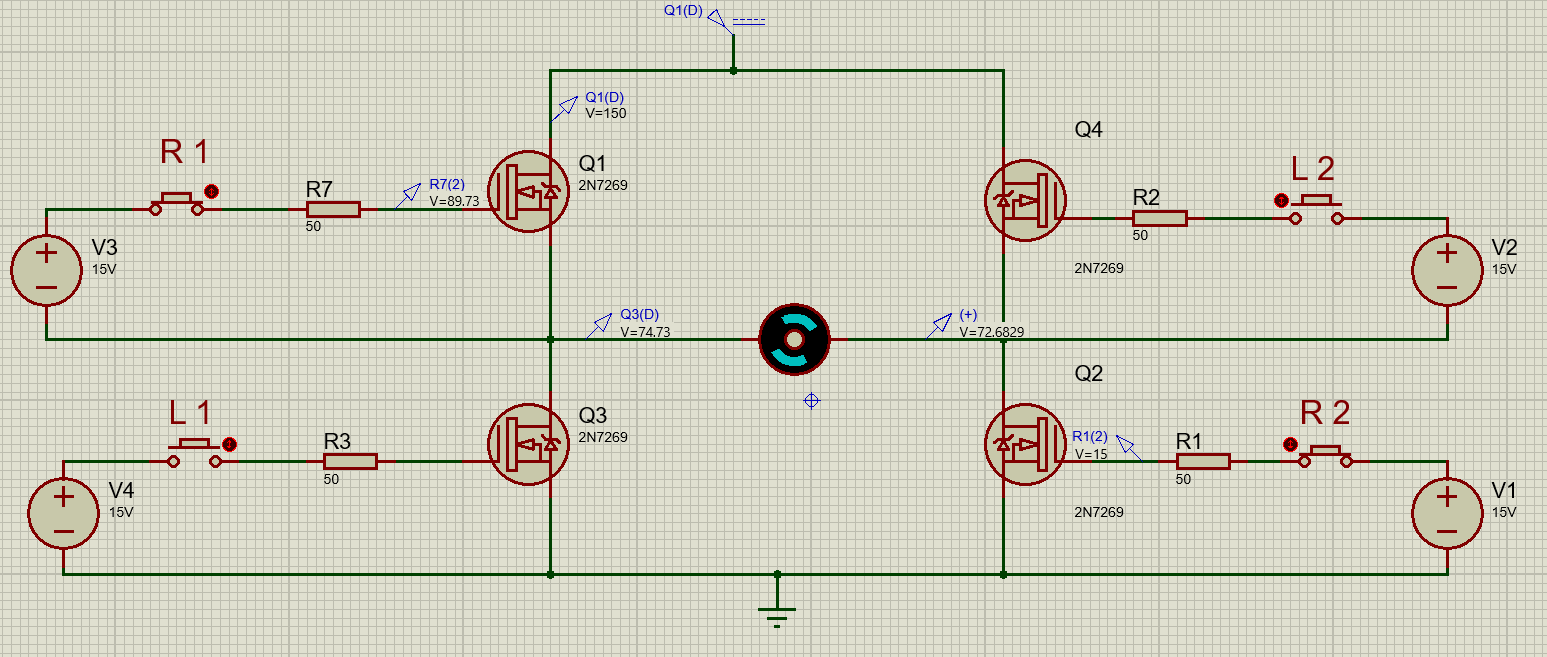
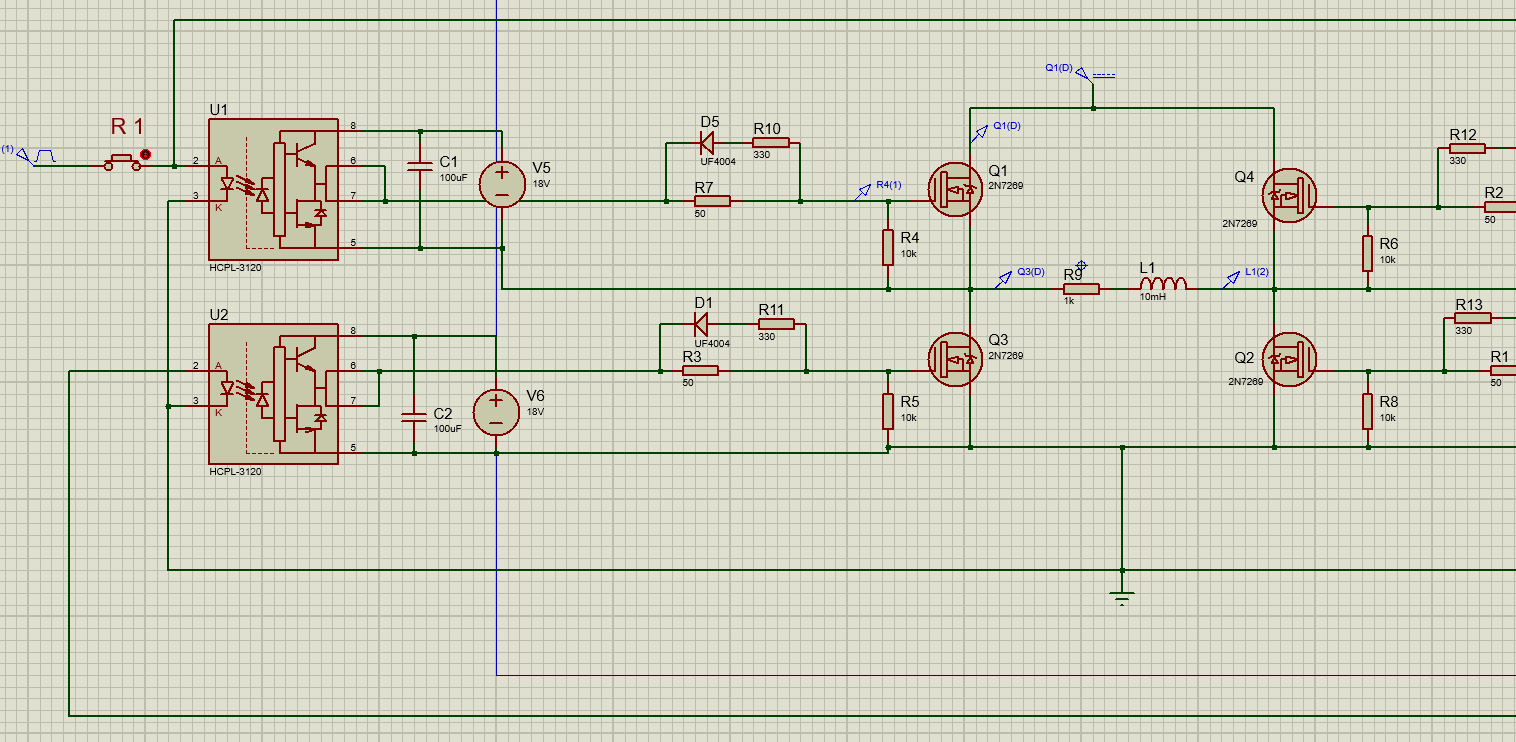
Ich hab mir das nochmal von vorne durchgegangen, also probiere ich die nun mit den MOSFETs. Im Bild 1 ist eine Halb-brücke, bei denen funktioniert das ganz gut, da kommt eine sinnvollige Ausgangsspannung raus. Wenn ich aber die Schaltung als Vollbrücke erweitere (Bild 2), dann lande ich wieder im selben Fehler. Also kommt ca die Hälfte am Ausgang. Geplannt von mir: 1) Als erste Schritt in meinem Projekt, möchte ich die Vollbrücke ergänzen (inkl. Drehrichtung). 2) Ich werde 4 PWM-Driver modell HCPL 3120 (jede Transistor jeweils ein Driver) einsetzen. Dies sollten bereit pulsierenden PWM-signale (aus der Arduino UNO3) zu der Vollbrücke übertragen. 3) Anhand der Arduino könnte ich die PWM-Signal (Duty Cycle) anpassen und somit die Drehzahl des Motor/Generator steuern. Also Optokoppler bzw. PWM-Driver folgen noch bei der Simulation. Nun wollte ich erstmal die Vollbrücke erstmal problemlos laufen lassen!
Jedenfalls fehlen 4 Widerstände von G nach S, z.B. 10 kOhm. Ein offenes Gate behält nämlich seine Ladung und wirkt uU als Antenne.
Angehängte Dateien:
-

Bild_3.png
21 KB -

Bild_4.png
21 KB -

Bild_5.png
92 KB -

Datasheet.png
52 KB
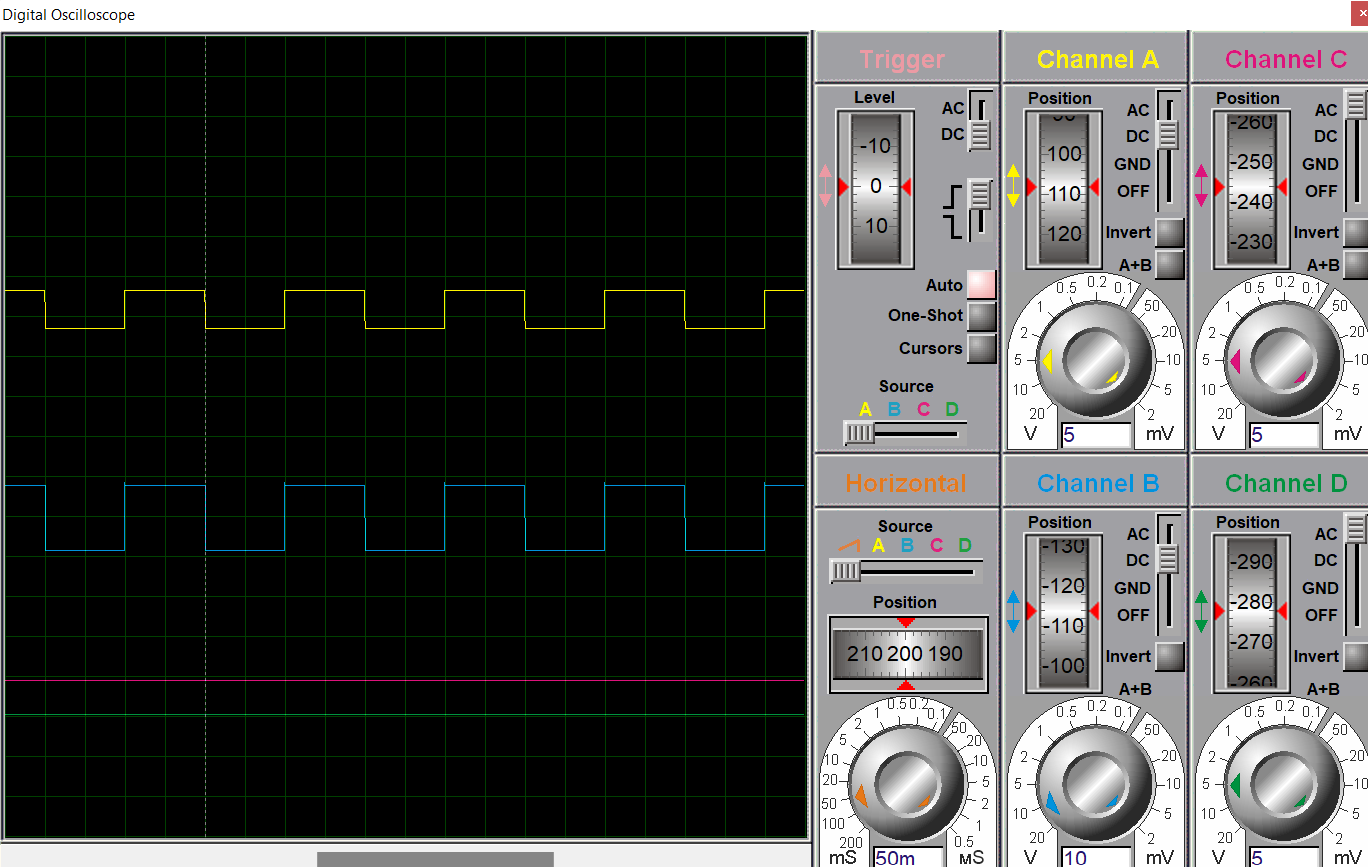
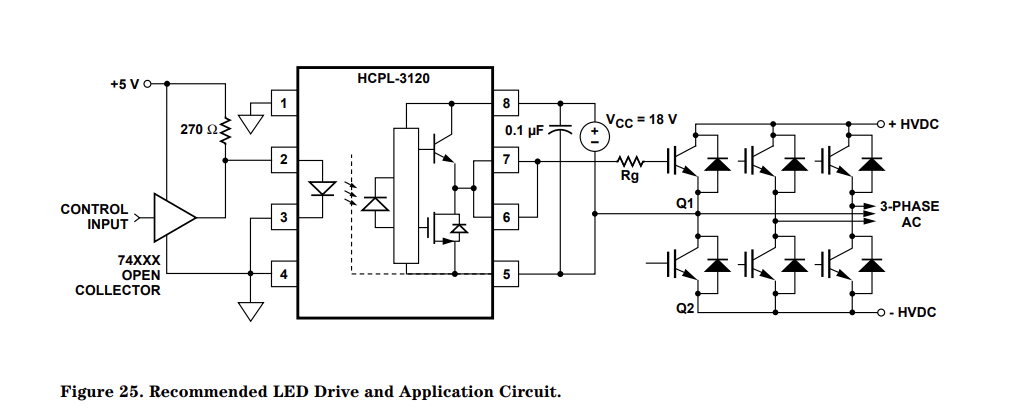
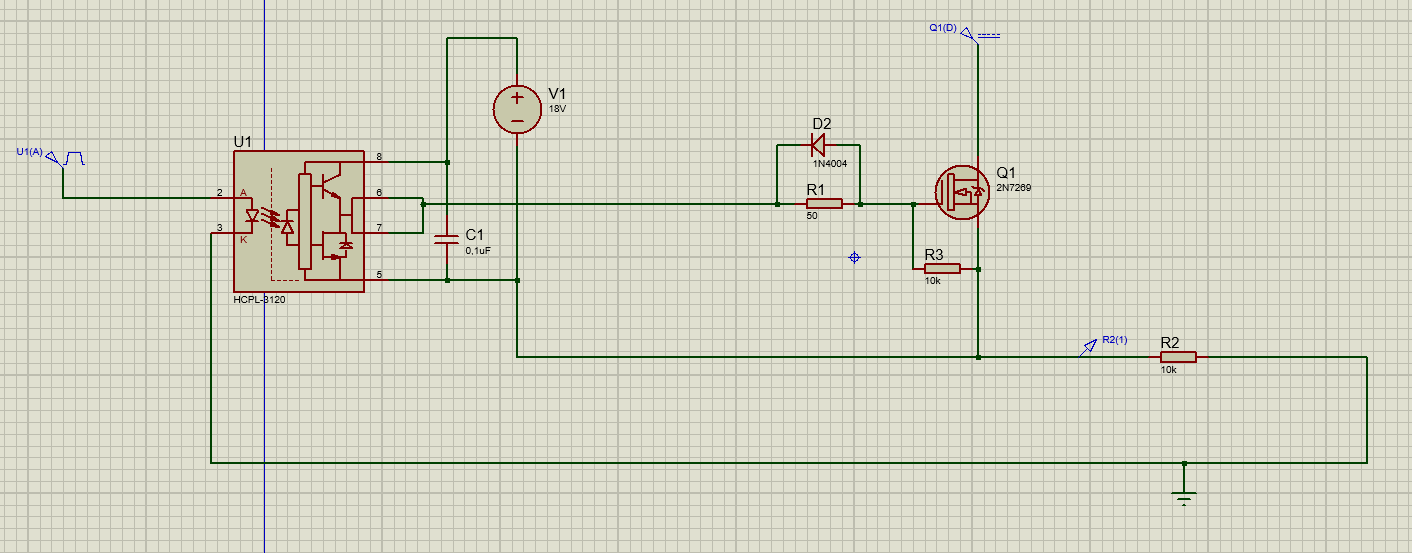
Danke für eure Anmerkungen. Ich hab das nochmal angepasst und hat wohl gut funktioniert. Also da kriege ich am Ausgang die gewünschte Spannung raus. Als nächstes wollte ich nun Schritt für Schritt ein Pulssignal testen. Hiefür hab ich Puls-Quellen eingesetzt (4 Source, pro Driver eine Quelle - Bild 3), die pulsierenden Signale erzeugen . Diese werden anhand der Driver HCPL weiter zur Vollbrücke übertragen. Beim Treiber sieht das Signal gut aus, also hier taktet das Signal zwischen 0 und ~5V am Eingang, und zwischen 0 und ~17V am Ausgang des Treibers (Bild 5). Es ist mir aber aufgefallen, dass der transistor (Gate) ist irgendwie gesperrt, und somit fließt keinen Strom zum Motor (Ausgang = 0V). Da kriege ich also keinen Werte am Ausgang (U=0V). Ich will mittlerweile dieser Treiber (HCPL) verwenden. Ich hab das Datasheet schrittweise gefolgt und genauso simuliert (Bild Datasheet). Anscheinend hab ich hier was übersehen. Wie könnten ich das bitte dann hinkriegen ?
Hedi schrieb: > Wie könnten ich das bitte dann hinkriegen ? Indem du nicht überall GND Symbole verteilst und verbindest. Den Motor hast du im Moment kurzgeschlossen. Es darf nur ein GND Symbol geben und das ist an der negativen Schiene unten im Bild (Emitter der Lowside IGBT).
Angehängte Dateien:
-

Bild_6.png
22 KB -

Bild_7.png
91 KB
Matthias S. schrieb: > Indem du nicht überall GND Symbole verteilst und verbindest. Den Motor > hast du im Moment kurzgeschlossen. Es darf nur ein GND Symbol geben und > das ist an der negativen Schiene unten im Bild (Emitter der Lowside > IGBT). Ich hab alle Massen mit einem einzigen GND verbunden, damit ich hier den Kurzschluss vermeide. Der Motor dreht sich jetzt wieder und die Ausgangsspannung taktet wie gewünscht (Ein-/ Ausschaltvorgang - Bild 7). Allerdings taktet den Wert hier zwischen 0 und ca. 12V. Für eine Antriebspannung von ca. 150V (angelegt für Motor) ist am Ausgang einen nähren Wert zu 150V zu erwarten! Die Frage jetzt, wie könnte ich bitte den gewünschten Ausgangswert erreichen ? und ob der Motor noch im Kurzschluss befindet (Bild 6) ?
Angehängte Dateien:
-

Bild_6.png
22 KB
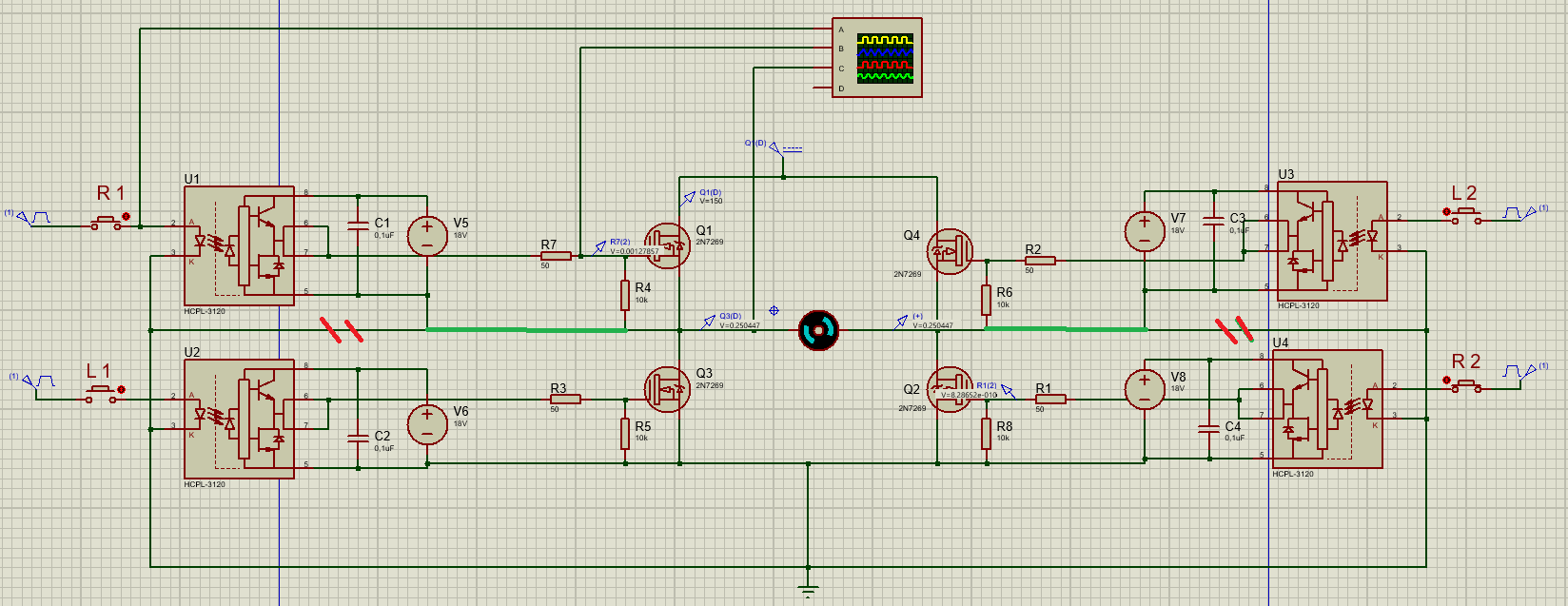
Stimmt immer noch nicht und der Kurzschluss ist immer noch da. Die Ansteuerung der oberen MOSFets muss sich auf deren Source beziehen, nicht auf GND. Ich habe dir den Plan mal entsprechend geändert. Rot: hier unterbrechen Grün: hier verbinden
Matthias S. schrieb: So fließt am Ausgang auch wieder nichts (U=0V), also der Motor ist noch gesperrt. Laut dem Datenblatt sollte der Pin 5 vom HCPL-Treiber mit der GND verindet werden. Deswegen hab ich die auf der Masse bezogen. > Ansteuerung der oberen MOSFets muss sich auf deren Source beziehen, > nicht auf GND. Hier hast du vollkommen recht :) Was wäre dann bitte alternativ, damit die Ausgang des Treibers auf die Masse (wie im Datenblatt) und gleichzeitig die Ansteuerung auf deren Source bezogen wird ?
Hedi schrieb: > Laut dem Datenblatt sollte der Pin 5 vom HCPL-Treiber mit der GND > verindet werden. Deswegen hab ich die auf der Masse bezogen. Ja nee, der obere Teil hat natürlich keine Bezug auf Masse, sondern nutzt als Bezugspunkt den Minuspol der oberen Versorgung (V5 bzw. V7). Wenn du das so schaltest, wie ich es dir gemalt habe, klappt es. Das setzt aber voraus, das V5 und V7 erdfrei sind. Im realen Leben müssen das galvanisch getrennte DC/DC Wandler sein.
Hedi schrieb: > Laut dem Datenblatt sollte der Pin 5 vom HCPL-Treiber mit der GND > verindet werden. Deswegen hab ich die auf der Masse bezogen. Das sehe ich im Datenblatt nur bei den Testschaltungen, wo die Arbeitsweise erläutert wird. In Fig 25 ist davon nichts zu sehen. Darf auch nicht. Problem bei den Highside MOSFETS ist ja, dass Source von Q1 und Q4 floatet, mal hat es V+ und mal GND. Deswegen darf es nur isoliert mit Pin5 von U1 und U3 verbunden werden. Und V5 und V7 müssen auch erdfrei sein, wie bereits gesagt. Beispiel für einen DC/DC Wandler, potentialfrei: https://www.mouser.de/datasheet/2/281/1/kdc_mgj6_14mm-2941221.pdf
Hallo, der Nachteil Deiner Schaltung ist, das Du für jede H-Brücke drei Stromversorgungen braucht. Für U1 und U3 und eine gemeinsame für U2 und U4. Weiterhin musst Du den Takt genau abstimmen, damit nicht der obere und untere Mosfet einer Halbbrücke gleichzeitig durchschalten. Nutzt Du einen N-CH und P-CH in einer Halbbrücke, können die sich gegenseitig sperren und Du brauchst nur einen OK für diese Halbbrücke, sowie nur eine Stromversorgung für alle OK. Mein Beispiel hat auch Nachteile, die aber vielleicht nicht gravierend sind und leicht zu umgehen sind. Gruß Carsten
Beitrag #7203693 wurde von einem Moderator gelöscht.
Angehängte Dateien:
-

Bild_8.png
23 KB -

Bild_9.png
86 KB
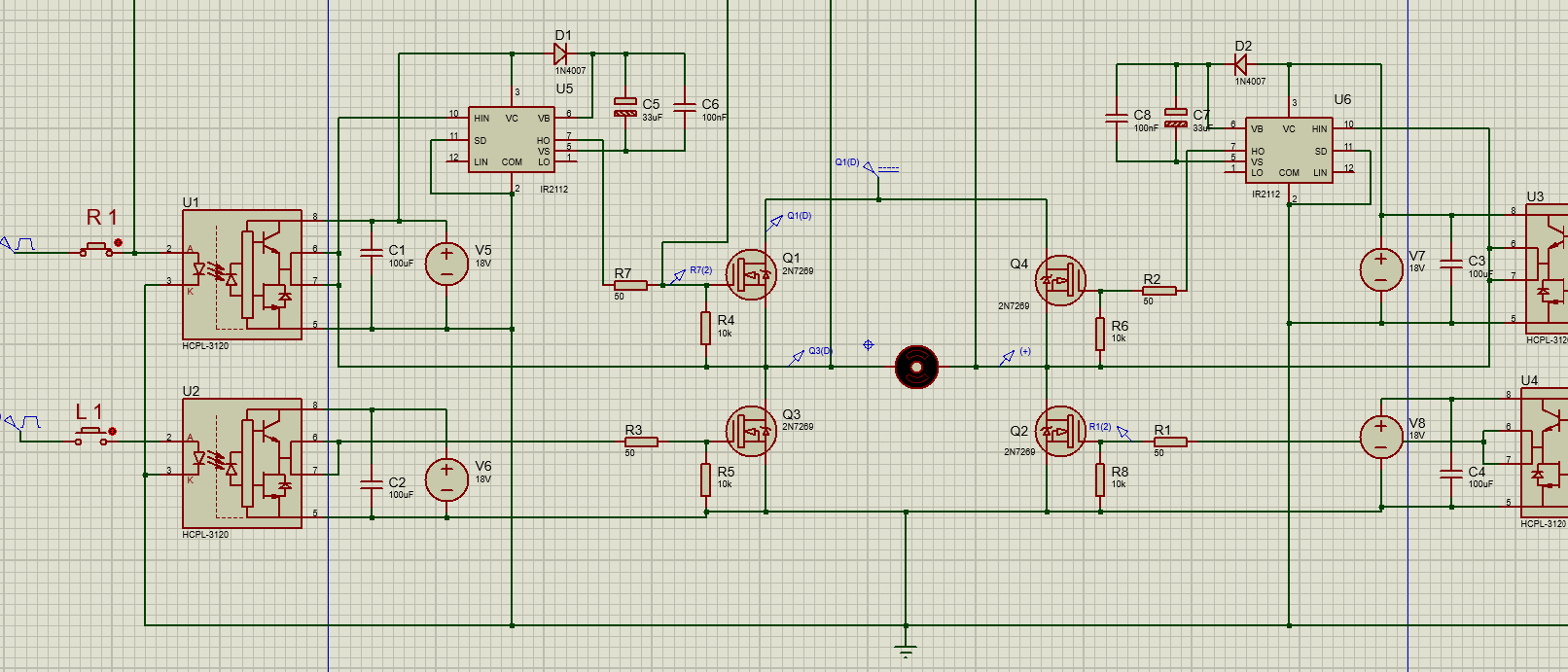
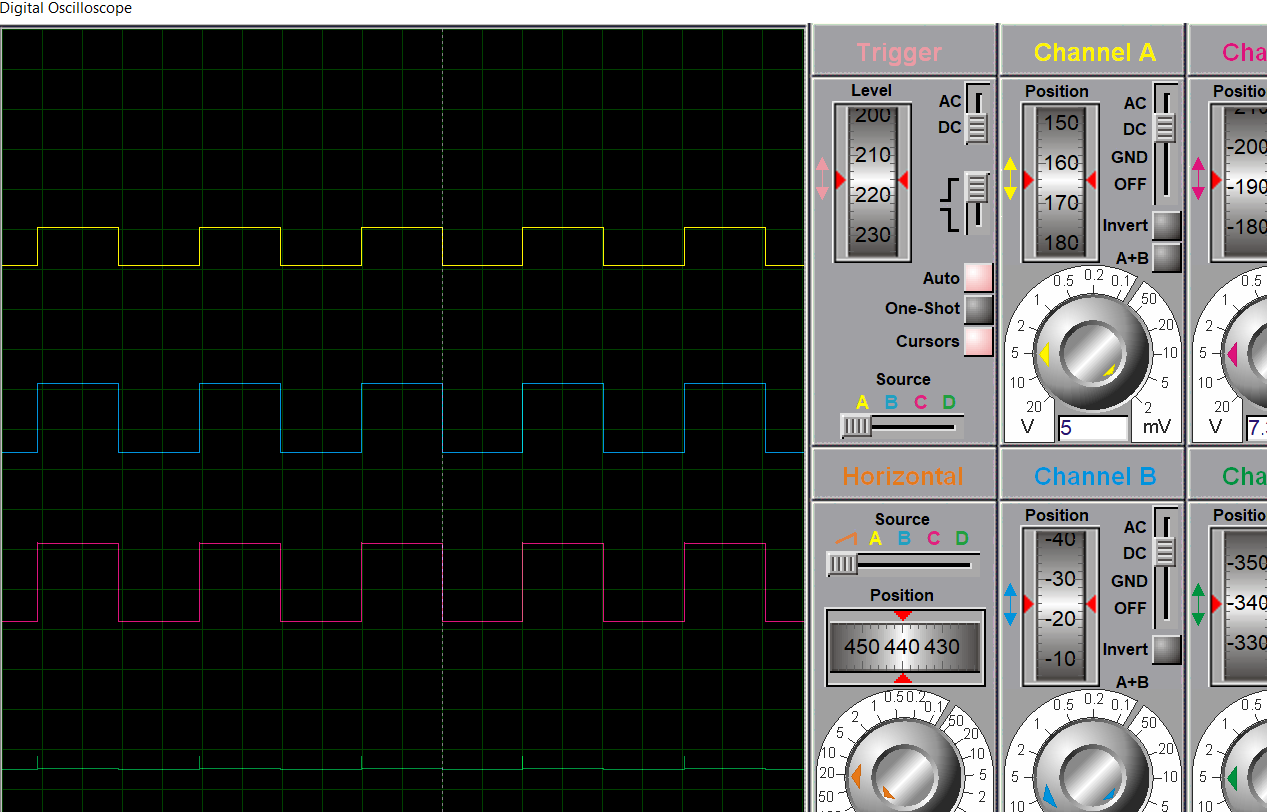
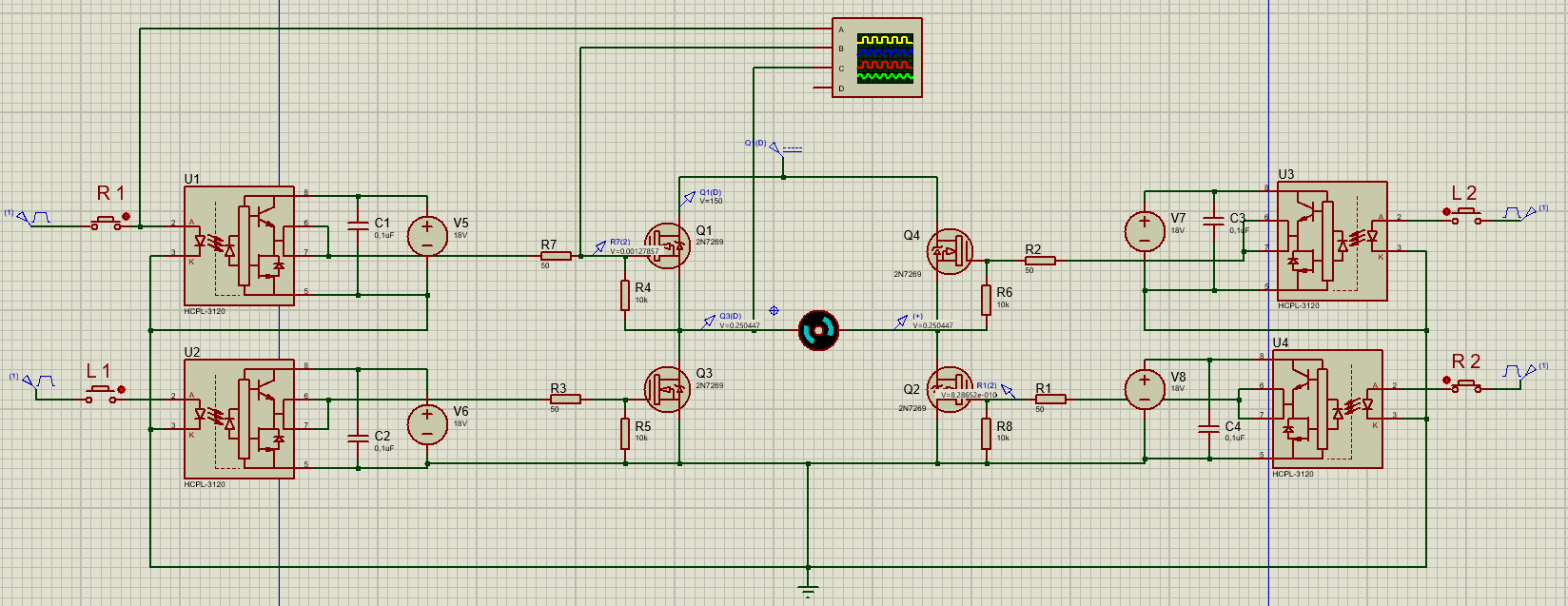
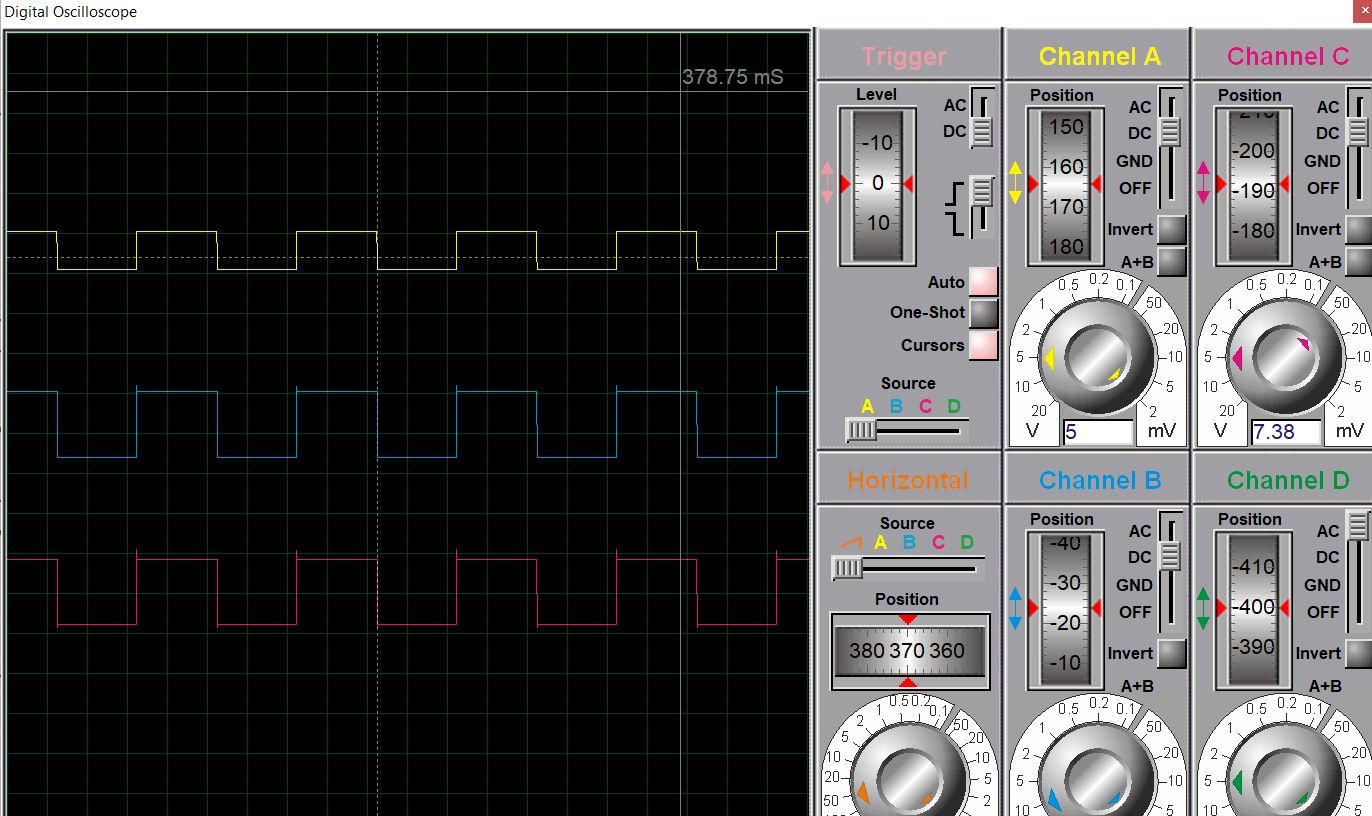
Wie ich das verstanden habe, sollten die Ansteuersignale von den Highside MOSFETs nicht auf der Masse bezogen bwz. müssen die V5 und V7 erdfrei sein. Dies wird wie ihr geasgt habt anhand eines DC/DC Wandlers gelöst. In der Bibliothek der Proteus 8 hab ich leider keinen passenden Wandler gefunden. Ich hab dann der IR2112 (Driver/Converter) verwendet, dies könnte auch als DC Wandler eingesetzt werden. Ich hab die Datasheet gefolgt und hiermal simuliert (Bild 8). Es sieht eigentlich besser aus, also der Motor dreht wieder und vor allem das Ausgangssignal taktet (ON/OFF). Allerdings ist der Ausgangswert immer noch kleiner als erwartet, also floatet zwischen 0V und ca. 15V (Bild 9) ... sollte aber so reltiv kleiner als 150V sein (Wie vorher). 1) Kann mir bitte jemanden sagen wo der Fehler hier liegt bzw. wie bekomme ich den gewünschten Ausgangswert ? 2) und gibt es viellecht anderen bzw. besseren Wandler, die in der Proteus 8 verfügbar sind ?
Nein, das mit dem IR2110 klappt so nicht, dieser Chip muss für High- und Lowside eingesetzt werden, damit seine interne Ladungspumpe funktioniert. So einen Treiber hätten wir dir schon lange vorschlagen können, aber er hat den Nachteil, das die Highside nicht für 100% der Zeit laufen kann, weil sonst die Ladungspumpe nicht 'aufgezogen' wird. Zwischendurch muss immer wieder die Lowside aktiv werden. In deiner Schaltung gibt es zusätzlich dann das Problem, das der Motor bei aktiver Lowside ja andersrum drehen würde. Geht also nicht so ohne weiteres. Ich kann dir noch einen anderen Ansatz zeigen aus meiner RC-Elektronik: Beitrag "Re: RC-Servoelektronik für DC-Motor" Hier haben wir P-Kanal in der Highside, was die Ansteuerung einfach macht.
Warum nimmst du nicht das von Matthias S korrigierte Bild vom 24.09. 15:51 Uhr? Grüne Leitung verlegen, rote Leitung kappen.
Bernd K. schrieb: > Warum nimmst du nicht das von Matthias S korrigierte Bild > vom 24.09. 15:51 Uhr? > > Grüne Leitung verlegen, rote Leitung kappen. Das hab ich doch probiert, hat auch nicht geklappt.
Hedi schrieb: > Das hab ich doch probiert, hat auch nicht geklappt. Dann ist da was anderes faul. Die Schaltung muss funktionieren, wenn du beide R Taster drückst oder beide L Taster. Ich weiss nicht, mit was du da simulierst, aber wenn V5 und V7 erdfrei sind, ist die Schaltung narrensicher. Wenn die Simulationssoftware korrekt arbeitet, darf z.B. die Schaltung mit dem IR2110 nicht spielen. Dieser Treiber ist sehr gut, aber für deinen Zweck nicht geeignet. Aus Spass an der Freude kannst du ja mal die Endstufe aus dem o.a. Projekt (RC-Servoelektronik) simulieren. Auch von der kann ich dir versichern, das sie funktioniert.
Angehängte Dateien:
-

Bild_1.png
20 KB -

Bild_2.png
21 KB
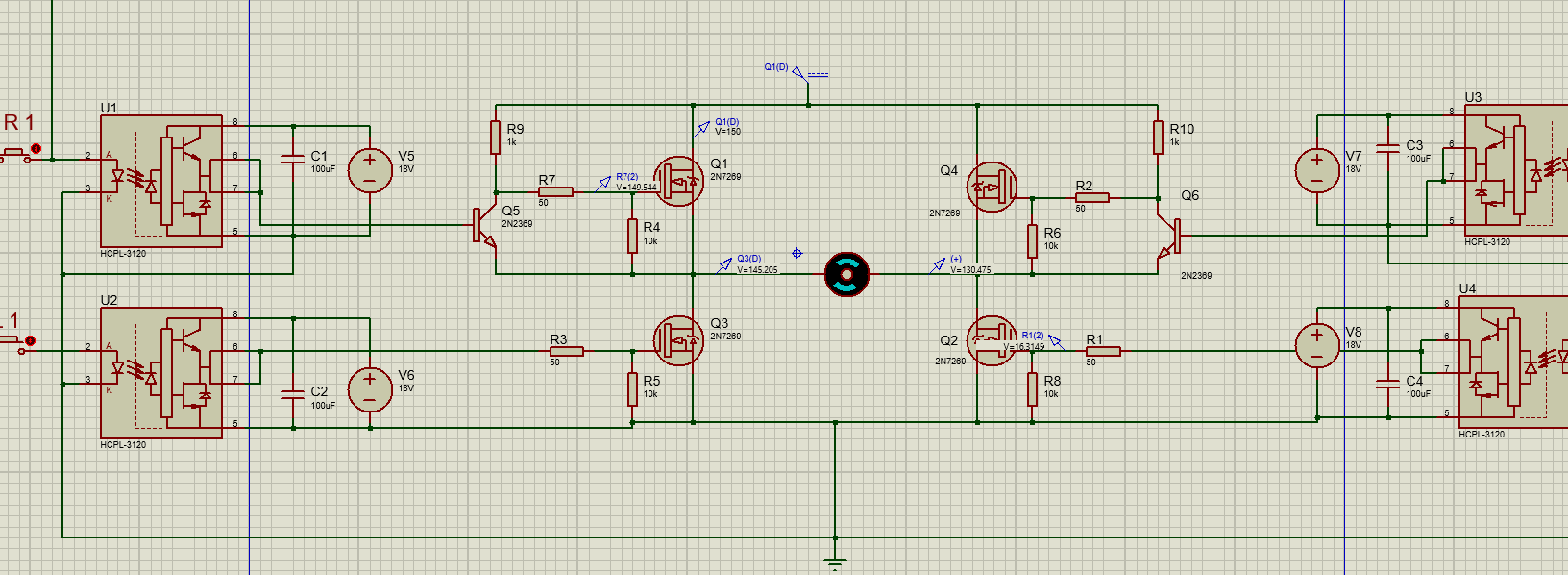
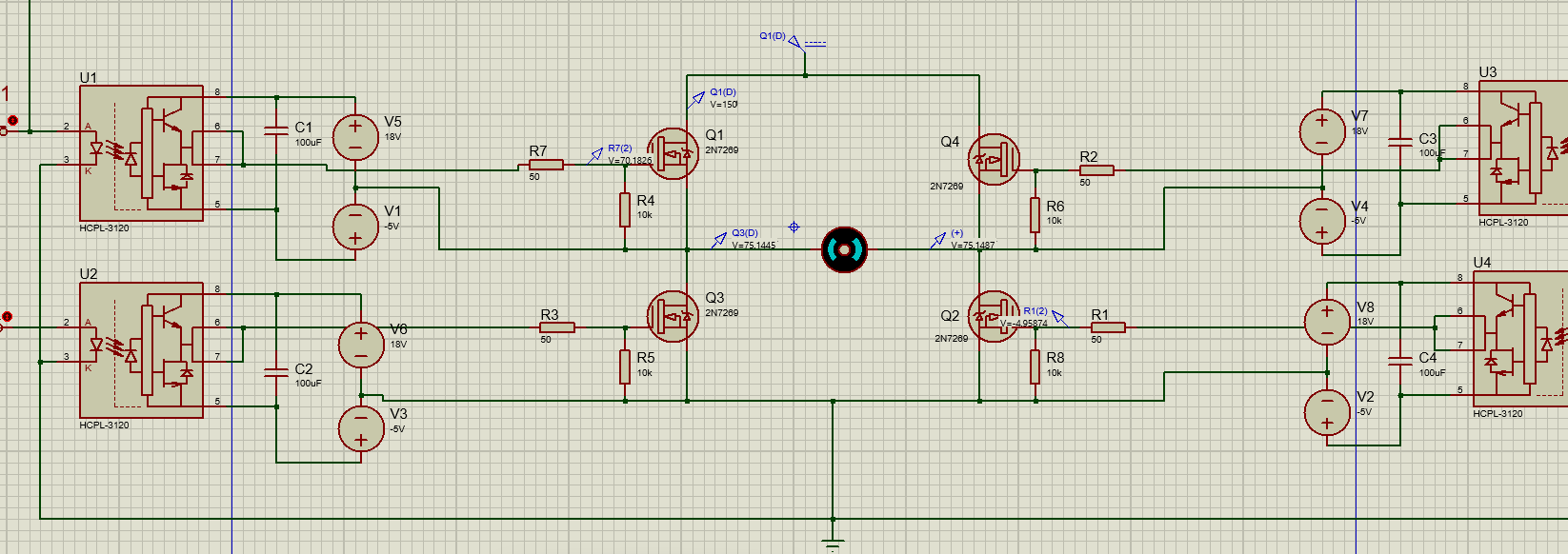
Ich hab die Bip. Transistoren (P-Kanal) in der Highside für die Ansteuerung probiert (Bild 1). Den gewünschten Wert wird am Ausgang errreicht, jedoch floatet das nicht ganz (zwischen 130-149V). Das Problem hier ist, dass die beiden Seiten gleichzeitig an bleiben, als ob es keinen Schalter existiert !! Ich hab auch mithilfe der Datasheet etwas anderes probiert, also mit zweiten negativen Spg. Quelle (Bild 2). Taktet am Ausgang immer noch nicht ganz und sind die beiden Drehrichtungen aktiv ! Ich wollte noch bei den HCPL-Driver bleiben, also das Problem liegt nur bei der Ansteuerung im High Side Mosfets. Auf euere Hilfe werde ich sehr dankbar :) Die Simulation ist im Anhang, falls jemand da was ergänen kann. (Proteus 8.13)
Hedi schrieb: > Bild_1.png Du bist verdammt lernresistent und ich habe jetzt keine Lust mehr. Wenn du das mit dem Bezugpunkt für die Highside partout ignorierst, wird deine Schaltung nie funktionieren. Das muss verdammt nochmal an die Source der Highsides und nicht an die Motormasse. Tschüss.
Hedi schrieb: > Bernd K. schrieb: >> Warum nimmst du nicht das von Matthias S korrigierte Bild >> vom 24.09. 15:51 Uhr? >> >> Grüne Leitung verlegen, rote Leitung kappen. > > Das hab ich doch probiert, hat auch nicht geklappt. Das sollst Du nicht (aus-)probieren und dann beim nächsten mal (/"Versuch") wieder ändern - sondern PRÄZISE SO MACHEN. Lies gründlich, was da oben steht: GND_Highside DARF NICHT mit GND_Lowside (dem "Haupt" GND, wenn man so will) verbunden werden. NIEMALS. (Ob nun bei (Halfbridge oder High-and-Low-Side)Gate Drive ICs mit Bootstrap-Ladungspumpe oder auch bei Gate Drive Optokopplern wie den HCPL-3120 oder wenn man die Halb- oder Vollbrücke egal wie aufbaut: Das Potential des oder der Schaltknoten(s) zw. HS-Fet(s) und LS-Fet(s) MUSS (!) frei "herumspringen" können ... ;-) Unterschied von IR(S)2XXX zu HCPL-XXXX ist nur, daß bei ersteren die HS=Highside Versorgung selbst erzeugt wird: Schalten die LS=Lowside Mosfets durch, lädt das die Bootstrap Kondensatoren (Prinzip Ladungspumpe (Guhgell)). Die HCPL-XXXX-Variante aber wird normalerweise mit galvanisch getrennten (aka mit Trafo) Versorgungen, zwei an der Zahl, betrieben. [Warum das? Man könnte nun zwar auch die HCPL-... mit zwei Ladungspumpen versorgen, bloß braucht man hierbei auch überhaupt keine "Gate Drive Optokoppler" wenn man deren galvanisch getrennte Schalt- Signal-Übertragung (per Licht, mittels LED die eine Fotodiode zum Stromfluß anregt) dadurch SINNFREI macht... in dem Fall kann man GLEICH nur ("Level-Shift(er/ing)") Treiber-ICs nutzen, die statt einer galv. Trennung den Level-Shift mit spannungsfesten (winzigen, im IC integrierten) Mosfets machen. Nachtrag: Auch wenn man die HS mit HCPL-... macht, reichen bei den beiden LS Mosfets (die eben auf "Haupt"-GND referenziert sind) einfache LS (Lowside) Gate Treiber. Die HCPL-... sind an der Stelle ganz einfach nur Verschwendung, also mehr als nur übertrieben.] P.S.: Welche Umsetzung (galv. getr. oder nicht, bzw. wie genau) hier KLÜGER wäre, ist ohne PRÄZISE Kenntnis der Anwendung (also auch von all deren Parametern) von niemandem hier beantwortbar. Also, ich bitte Dich: Sag endlich was Du präzise vor hast (gaaaanz ausführlich bitte). Evtl. war nämlich alles bisher nur reinste Zeitverschwendung.
Angehängte Dateien:
-

Bild_1.png
18 KB -

Bild_2.png
9 KB
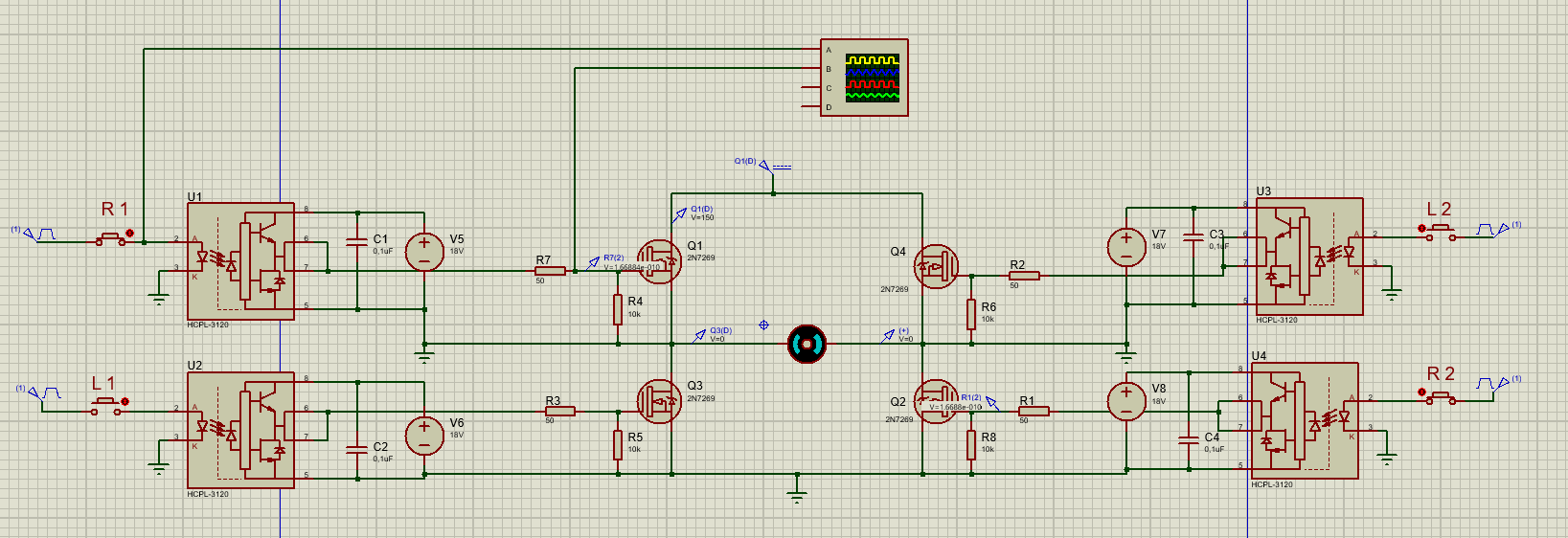
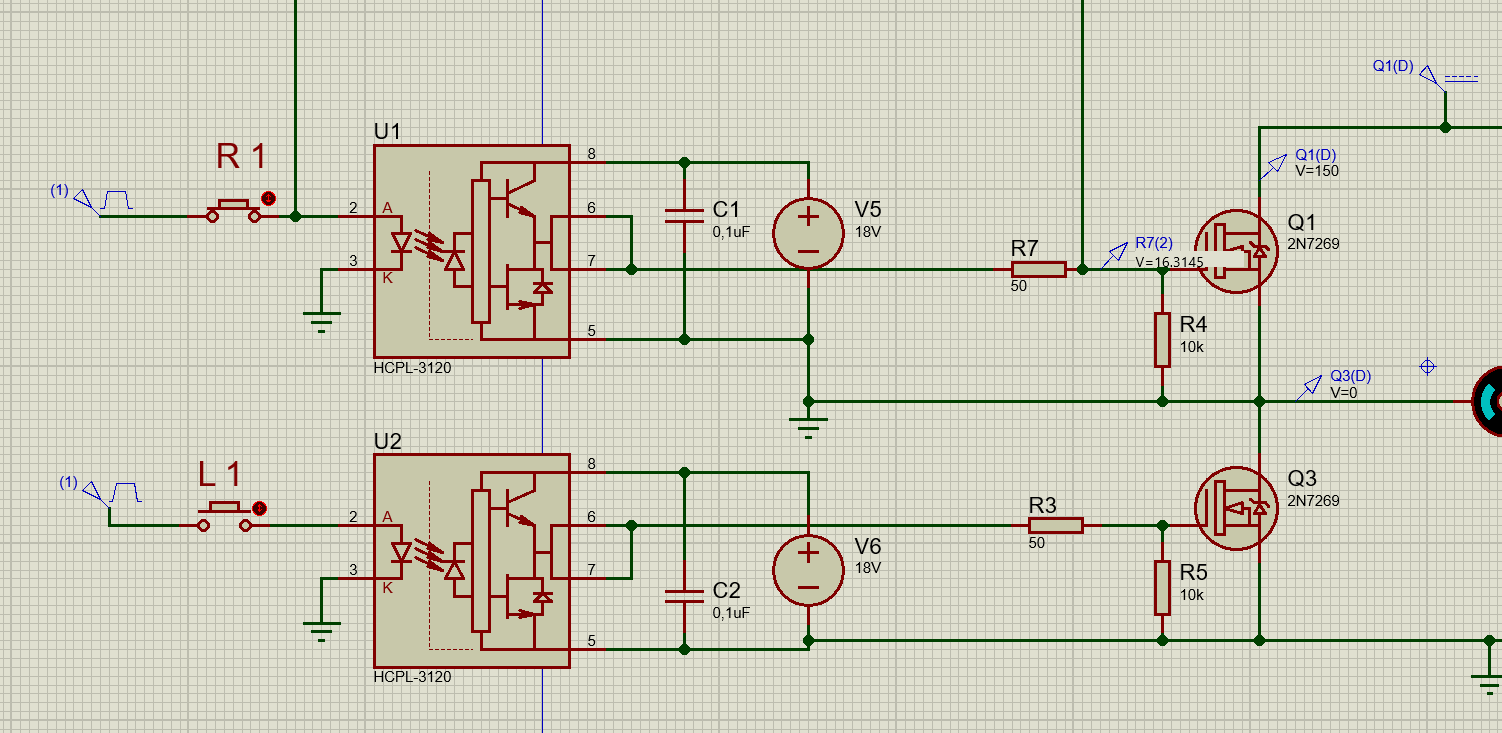
Alfred B. schrieb: > Hedi schrieb: >> Bernd K. schrieb: > Sag endlich was Du präzise vor hast (gaaaanz ausführlich bitte). Also, Ziel ist die Entwicklung eines Feldstellers für die Steuerung eines DC Generator/Motor. Der Erste Schritt ist die Simulation einer H-Brücke. Diese hab ich erfolgreich simuliert und ergibt den gewünschten Ausgang. Als nächstes muss ich ein Steuersignal aufbauen/erzeugen. Das Signal hab ich bereit anhand der Arduino programmiert. Damit werden die PWM-Signale erzeugt und mithilfe eines Potentiometers gesteuert (Variation von Duty Cycle). Die Übertragung diese Signale müssen durch Optocopler/Treiber erfolgen (Taktsignal). Zu diesem Zweck wollte ich die HCPL-Treiber verwenden. Wie "Matthias S. (Firma: matzetronics)2" sagte, sollte die Ansteuerung bei den HS-Mosfet driver auf deren Source beziehen und nicht aufm GND. Also die Quellen V5 und V7 müssen erdfrei sein (Galvanische Trennung). Wenn ich das hier simuliere wie er sagte, funktioniert das leider nicht [Bild 1] (sollte eigentlich funktionieren). Die HCPL sind eh galvanisch getrennt, braucht man dann theoretisch keine zusätzliche Trennung. Bei einem einzigen Transistor hat den HCPL wie "Matthias S. (Firma: matzetronics)2" erklärt geklappt [Bild 2]. Ich wollte hier nur sicher sein, dass die Software (Proteus 8) funktionsfähig ist. Ich wollte dann nun, dass die Schaltung funktioniert und am Ausgang den gewünschten Wert ergibt. Das Prinzip das Ihr mir erklärt habt, hab ich verstanden. Wie ich das aber in der Simulation einsetze bzw. welchen Tools ich hier brauche da komm ich leider nicht zu recht ! Das ist mein erstes Mal, dass ich ein betriebsorientiertes Projekt entwickele. Ich entschuldige bei allen falls ich einige Anmerkungen nicht ganz verstanden habe.
Hedi schrieb: > > Also die Quellen V5 und V7 müssen erdfrei sein (Galvanische Trennung). > Wenn ich das hier simuliere wie er sagte, funktioniert das leider nicht > [Bild 1] (sollte eigentlich funktionieren). Muss funktionieren. Es sei denn, V5 und V7 sind doch nicht erdfrei. Ich kenne mich mit Proteus 8 leider nicht aus. Bitte mal genau prüfen, ob hier vielleicht doch irgendeine galvanische Verbindung zu GND besteht. Weiterhin ist mir die Ansteuerung der Diode im HCPL-3120 aufgefallen. Eine Diode wird bestromt und nicht mit einer Spannung betrieben. Wenn die Eingangsspannung 5V beträgt, sollte der Strom durch die Diode auf 10mA begrenzt werden (erlaubt sind 7...16mA). Also 5V - 1,5V (Vf) / 0,01A = 350 Ohm, Praxiswert wäre 330 Ohm. Und die Quelle muss natürlich diesen Strom liefern können.
Ich nochmal. Die Ausräumdioden kannste weglassen, wenn du wirklich den HCPL-3120/3180 benutzt, denn der hat kräftige Gegentaktausgänge. Wenn du sie trotzdem verwendest, müssen sie schneller sein als eine 1N4007, also z.B. eine UF4007 oder BA157/159. Wie Bernd sagt, bitte Vorwiderstände vor jede LED. Was ist das für ein Motor? sage mal bitte die Daten.
Angehängte Dateien:
-

Bild_1.png
18 KB
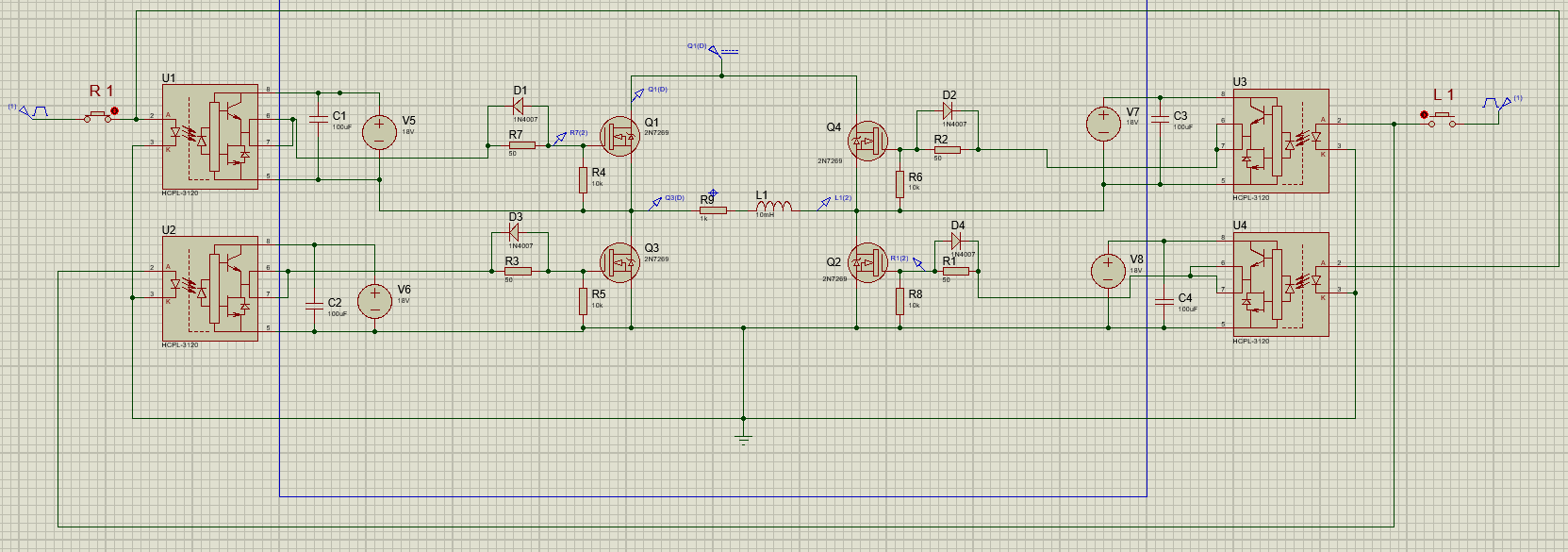
Wie ihr sagtet, hab ich ein Vorwiderstand vor LED eingesetzt und die Diode wegen der höhen Gegentaktausgang von HCPL mit einem anderen Modell (UF4004) angepasst. Funktioniert auch nicht! Die V5 und V7 sind hier auch erdfrei, also die Source vom HS Mosfets ist vom Minus Pol der V5 bzw. V7 versorgt (laut Matthias). > Was ist das für ein Motor? sage mal bitte die Daten. Es geht um ein DC Motor (DC Generator) mit einer maximalen Antriebsspannung von 180V und Strom 0,8A.
Angehängte Dateien:
-

Beispiel.jpg
33 KB
{kind=link}
Hallo, es ist schon sinnvoll den Steuerkreis vom Lastkreis (Motor) mit OK zu trennen. Warum verbindest Du die Masseverbindung dann wieder? Dann kannst Du auch gleich U2 durch zwei Transistoren und 2 Widerstände ersetzen. Die machen das schneller und sind billiger. Noch ein Risiko möchte ich ansprechen: Was ist, wenn versehentlich oder einen Fehler R1 und L1 gleichzeitig gedrückt werden? Im Bild habe ich mal versucht sehr vereinfacht den Vorteil der Kombination NPN/PNP bzw. C_CH / P-CH zu zeigen. Dabei geht es nur ums Prinzip. Damit würdest Du niemals etwas durch drücken beider Taster zerschießen. Die Ansteuerung ist einfacher und Du brauchst nur 2 OK und eine Spannungsversorgung. Ein anderes Beispiel hast Du ja schon bekommen. Viel Erfolg Carsten
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.