Hallo Wenn ich die Liste der neuen ICs von Atmega und Attiny bzw. Nachfolger des Herstellers so anschaue gibt es viele neue Sachen. Gerade die AVR0 und AVR1 Serie (heissen die so?) sind ja sehr vielfältig. Es gibt auch die passenden kleinen Boards oder Arduino dazu. Für mich bleibt die Frage, für was soll am sich entscheiden? Welchen AVR, welche Programmierung oder doch den RP2040 oder doch lieber den RP2340 (noch mit Fehler?). Wie ist eure Meinung dazu?
Achim S. schrieb: > Für mich bleibt die Frage, für was soll am sich entscheiden? Die Frage stellt sich doch immer. Du nimmst * was genug Resourcen hat, dein Problem zu lösen * wofür du die Werkzeuge schon hast (Toolchain, Programmer, etc) * wofür du Hilfe bekommen kannst (vulgo: was die anderen nehmen) * was dir persönlich gefällt
Achim S. schrieb: > Wie ist eure Meinung dazu? Nimm das, was für deine Aufgabe, deinen Kenntnisstand und deine Werkzeuge am besten passt. Wenn du irgendwas batteriebetriebenes machen willst, was sich die meiste Zeit schlafen legen soll, dann schau auf den Ruhestrom. Wenn du numbercrunching machen willst (FFT oder so), dann schau auf die Rechenleistung. Wenn du etwas direkt aus einer LiPo-Zelle betreiben willst, dann schau, dass du etwas findest, das am besten ohne weiteren Spannungsregler (der nur eigene Verluste und kompliziertere Schaltung mit sich bringt) an 4 V betreibbar ist. Wenn du viele GPIOs brauchst … die Liste ließe sich endlos fortsetzen. Auf jeden Fall ist es gut für die Diversität, dass Microchip nach dem Auffressen von Atmel die AVRs wertgeschätzt und weiterentwickelt hat, statt sie zugunsten der PICs einfach einzustampfen.
Achim S. schrieb: > Wie ist eure Meinung dazu? Man nimmt den µC, der die Aufgabe effizient und zuverlässig löst. Zur Effizienz zählen Zeit, verfügbares Wissen und die durch die Toolchain und den Materialaufwand entstehenden Kosten. Und wenn das Ganze als Hobby ausgeübt wird, kommen persönliche Vorlieben ganz weit nach vorne.
Achim S. schrieb: > Für mich bleibt die > Frage, für was soll am sich entscheiden? Welchen AVR, welche > Programmierung oder doch den RP2040 oder doch lieber den RP2340 (noch > mit Fehler?). Man kann Äpfel mit Birnen vergleichen, aber nicht 8-Bit-Architektur mit 32-Bit-Architektur. Für kleine einfache Steuerungen sind 8-Bit-Mikrocontroller ausreichend. Wenn aber viel mit 32-Bit-Zahlen/Variablen gearbeitet wird, dann nimmt man selbstverständlich einen 32-Bit-Mikrocontroller.
Jörg W. schrieb: > Auf jeden Fall ist es gut für die Diversität, dass Microchip nach dem > Auffressen von Atmel die AVRs wertgeschätzt und weiterentwickelt hat, > statt sie zugunsten der PICs einfach einzustampfen. Dafür Daumen hoch für Jörg und Atmel ... äh, ich meinte Microchip. Wirklich erwartet hatte ich nicht, dass AVR dann weiterentwickelt worden ist. Flashen mittels UPDI ist gar nicht so verkehrt (benötigt halt anderen Programmer), aber die in Fleisch und Blut übergegangene Sache mit den Fuses, die jetzt komplett anderst sind, mußte man sich erst gewöhnen. Lothar M. schrieb: > Und wenn das Ganze als Hobby ausgeübt wird, kommen persönliche Vorlieben > ganz weit nach vorne. aber sowas von weit !
Falls Dich meine Meinung zu dem Thema interessiert, ich würde als diesen "Nachfolger" die ARM Cortex M0/M0+ oder M3 sehen, aber den AVRs noch lange nicht ihren Platz absprechen. Irgendwelche Lampensteuerungen mit etwas Zeitschalter und Logikfunktion braucht man immer und dafür reicht ein AVR in 100 Jahren noch. Die ARM Cortex sind inzwischen so preiswert, daß sie in der Industrie gerne für fast alles eingesetzt werden. Bei Elektroscootern z.B. ist alles voll mit STM32Fxxx oder deren Klonen. Also wenn mir irgendwann der ATMega nicht mehr reicht, dann nehme ich ziemlich sicher sowas.
Achim S. schrieb: > Welchen AVR, Was AVR betrifft, empfehle ich den Umstieg auf die neueren Typen mit UPDI. Gründe: deutlich flexiblere und umfangreichere Peripherie sowie mehr Speicher, und das bei gleichzeitig wesentlich günstigerem Preis. Der Umstiegsaufwand hält sich in Grenzen, mit dem Mplab Snap ist ein sehr günstiges Tool zum UPDI Flashen und Debuggen erhältlich. Programmiertechnisch gibt es zwar einige Änderungen und potentielle Fallstricke, die aber bekannt und schnell umgesetzt bzw. umgangen sind.
Achim S. schrieb: > Wenn ich die Liste der neuen ICs von Atmega und Attiny bzw. Nachfolger > des Herstellers so anschaue gibt es viele neue Sachen. Die Frage ist doch erstmal, benötigst Du die neuen Bells & Whistles überhaupt? Und willst Du dafür alle Deine bereits entwickelten Libs komplett umstellen? Z.B. die Timer und andere Hardware sind ja deutlich unterschiedlich zu den klassischen ATMega/Tiny. Will man einen Bootloader benutzen, ist das mit den neuen Typen deutlich komplizierter, da der Bootloader nun an 0x0000 stehen muß. Der Bootloader muß daher wissen, wo die Applikation startet. Und die Applikation muß wissen, daß überhaupt ein Bootloader verwendet wird und wo dieser endet. Das alte Konzept mit Bootloader am Ende ist daher deutlich universeller.
Der Grund, mich von AVR zu verabschieben, war die etwas spärliche Peripherie bei den alten Typen: nur ein UART, nur ein I2C, nur ein SPI, und das alles auf festen Pins. Hier konnten die PICs einfach mehr. Zudem gibts in der PIC-Welt PPS: Programmable Pin Select. Damit kann man Peripheriefunktionen sehr flexibel auf Portpins verteilen, die vorhandene Peripherie besser ausnutzen und das Layout vereinfachen. Sehr praktisch ist auch das PSV-Feature (Program Space Visibility) bei PIC24 und dsPIC33. Hierbei wird ein Teil des Programm-Flashes in den Datenadressraum eingeblendet. Somit muss man nicht mehr mit tblrd ((E)LPM in der AVR-Welt) arbeiten, sondern kann direkt drauf zugreifen. Die neuen AVRs haben ein ähnliches Feature. Ein weiterer Fortschritt bei den neuen AVRs: voller Prozessortakt auch bei 3.3V. Microchip hat das ja schon länger so gemacht, dass der Core nur mit 1.8 oder 2.5V lief und nur der IO-Ring mit VCC betrieben wurde. Niedrigere Spannung → kleinere Transistoren → höhere Geschwindigkeit. Atmel war da gefühlt etwas schnarchnasig gewesen. fchk
> nur ein UART Zumindest der ATMega1284 hat davon schon mal zwei. Mich stört an der Austattung solcher Controller immer der ADC. Der ist zwar eigentlich nicht verkehrt und liefert gute Ergebnisse, aber er könnte ruhig 16 Bit haben. Selbst wenn die unteren zwei Bit bei einem integrierten ADC evtl. durch den Core stark rauschen. 12 Bit sind auch schon wieder etwas wenig, wenn schon mehr als 10, dann bitte gleich 16 Bit. Der Takt könnte auch manchmal etwas höher sein. Manche AVRs können zumindest für die Timer eine PLL mit 64Mhz oder so, aber leider nicht alle.
Frank K. schrieb: > Der Grund, mich von AVR zu verabschieben, war die etwas spärliche > Peripherie bei den alten Typen: nur ein UART, nur ein I2C, nur ein SPI, > und das alles auf festen Pins. Das mit den festen Pins ist richtig, aber ich habe schon öfters privat den Atmega324PB verwendet, der hat 3xUSART, 2xI2C, 2xSPI ... Bei den neuen AVR gefällt mir das manche Typen für USART wohl keinen externen Quarz mehr brauchen und fürs Programmieren mit UPDI nur noch einen Pin "verschwenden". Der ADC kann nun wohl 12Bit. Ein AVR16EB28 liegt hier noch unbenutzt herum. Auf der anderen Seite sieht es mit Tutorials, bewährten Bibliotheken und dergleichen super-mau aus. Da gibt es gefühlt gar nichts, maximal Links zu Microchip selbst. Kein Vergleich mit Atmega328PB oder Attiny2313 oder oder oder ...
Jochen D. schrieb: > Bei den neuen AVR gefällt mir das manche Typen für USART wohl keinen > externen Quarz mehr brauchen Das ist richtig, bei AFAIK allen Typen mit UPDI ist der interne HF-Oszillator nun ausreichend genau für UART (zumindest bei Zimmertemperatur). Jochen D. schrieb: > Tutorials Ich hatte mal überlegt, hier im Wiki ein Tutorial zu einem der neuen AVRs (vielleicht 128DB28 oder 64EA28) zu beginnen, nach dem Vorbild des alten ATmega8-Tutorials, also mit Assembler. Mache ich vielleicht mal, wenn ich Zeit habe.
Angehängte Dateien:
Jochen D. schrieb: > Auf der anderen Seite sieht es mit Tutorials, bewährten Bibliotheken und > dergleichen super-mau aus. Da gibt es gefühlt gar nichts, maximal Links > zu Microchip selbst. Ich finde die Datenblätter mit vielen Diagrammen schon ziemlich verständlich.
Frank K. schrieb: > Sehr praktisch ist auch das PSV-Feature (Program Space Visibility) bei > PIC24 und dsPIC33. Hierbei wird ein Teil des Programm-Flashes in den > Datenadressraum eingeblendet. Somit muss man nicht mehr mit tblrd > ((E)LPM in der AVR-Welt) arbeiten, sondern kann direkt drauf zugreifen. > Die neuen AVRs haben ein ähnliches Feature. Linearen Adressraum, in dem der Programmspeicher sichtbar ist, haben neueren AVRs aber auch: 0-Series: ATtiny202, ATtiny204, ATtiny402, ATtiny404, ATtiny406, ATtiny804, ATtiny806, ATtiny807, ATtiny1604, ATtiny1606, ATtiny1607, ATmega808, ATmega809, ATmega1608, ATmega1609, ATmega3208, ATmega3209, ATmega4808, ATmega4809, 1-Series: ATtiny212, ATtiny214, ATtiny412, ATtiny414, ATtiny416, ATtiny416auto, ATtiny417, ATtiny814, ATtiny816, ATtiny817, ATtiny1614, ATtiny1616, ATtiny1617, ATtiny3214, ATtiny3216, ATtiny3217. 2-Series: ATtiny424, ATtiny426, ATtiny427, ATtiny824, ATtiny826, ATtiny827, ATtiny1624, ATtiny1626, ATtiny1627, ATtiny3224, ATtiny3226, ATtiny3227. AVRrc: ATtiny4, ATtiny5, ATtiny9, ATtiny10, ATtiny102, ATtiny104, ATtiny20, ATtiny40. AVR-Dx: AVR16DD14, AVR16DD20, AVR16DD28, AVR16DD32, AVR16DU14, AVR16DU20, AVR16DU28, AVR16DU32, AVR32DA28, AVR32DA32, AVR32DA48, AVR32DB28, AVR32DB32, AVR32DB48, AVR32DD14, AVR32DD20, AVR32DD28, AVR32DD32, AVR32DU14, AVR32DU20, AVR32DU28, AVR32DU32. AVR-Ex: AVR16EA28, AVR16EA32, AVR16EA48, AVR16EB14, AVR16EB20, AVR16EB28, AVR16EB32, AVR32EA28, AVR32EA32, AVR32EA48. AVR-SD: AVR32SD20, AVR32SD28, AVR32SD32. Bei den größeren AVR-Dx und AVR-Ex Teilen mit ≥ 64KiB Programmspeicher ist immerhin ein 32KiB Segment im SRAM-Adressraum zu sehen. Welches, kann man in den GNU Tools per Kommandozeilen-Option auswählen: AVR64DA28, AVR64DA32, AVR64DA48, AVR64DA64, AVR64DB28, AVR64DB32, AVR64DB48, AVR64DB64, AVR64DD14, AVR64DD20, AVR64DD28, AVR64DD32, AVR64DU28, AVR64DU32, AVR64EA28, AVR64EA32, AVR64EA48, AVR64SD28, AVR64SD32, AVR64SD48, AVR128DA28, AVR128DA32, AVR128DA48, AVR128DA64, AVR128DB28, AVR128DB32, AVR128DB48, AVR128DB64. Zum Beispiel wählt -Wl,--defsym,__flamp=1 den 2ten 32KiB Block aus, und Binutils, Startup-Code und Compiler kümmern sich um den Rest. (Default ist der letzte 32KiB Block). Falls man aus irgendwelchen Gründen .rodata im SRAM bevorzugt, kann man mit -mrodata-in-ram compilieren.
Johannes F. schrieb: > Ich hatte mal überlegt, hier im Wiki ein Tutorial zu einem der neuen > AVRs (vielleicht 128DB28 oder 64EA28) zu beginnen Ja, es ist sehr schwer, unter den vielen neuen AVRs was auszuwählen. Inzwischen sind es 10 Familien: - tinyAVR® 0 - tinyAVR® 1 - tinyAVR® 2 - megaAVR® 0 - AVR® DA - AVR® DB - AVR® DD - AVR® EA - AVR® EB - AVR® SD Vermutlich gab es mal hohe Prämien für jede neue Familie.
Peter D. schrieb: > Vermutlich gab es mal hohe Prämien für jede neue Familie. Ja stimmt, das dachte ich mir auch noch schon oft. Bei den mittlerweile sehr vielen Typen ist es schon recht schwer, einen Überblick zu behalten. Etwas erleichternd ist zumindest bei den AVRs, dass die Benennung der neuen Familien einem Schema folgt (Flashgröße, Familie, Pinzahl). Die PICs dagegen haben soweit ich weiß vollkommen willkürliche Nummern, bei mindestens ebenso vielen Typen.
Georg M. schrieb: > Jochen D. schrieb: >> Auf der anderen Seite sieht es mit Tutorials, bewährten Bibliotheken und >> dergleichen super-mau aus. Da gibt es gefühlt gar nichts, maximal Links >> zu Microchip selbst. > Ich finde die Datenblätter mit vielen Diagrammen schon ziemlich > verständlich. Und? Was hat die Verständlichkeit der Datenblätter (der ich gar nicht widerspreche!) mit der (Nicht-)Verfügbarkeit von bewährten Bibliotheken (wie z.B. Fleurys UART Lib, yaMBSiavr, async TWI-Lib) und Tutorials für neue AVR-Familien zu tun? Kann natürlich jeder anhand der Datenblätter eigens für sein jeweiliges Projekt an den ausgewählten Prozessor anpassen. In den Anfangszeiten war ich immer ein bisschen froh wenn wenigstens ein Teil der Software verlässlich funktional war und ich mich dann "nur" um die Bugs in "meinen" Funktionen oder Beschaltung kümmern konnte / musste...
Achim S. schrieb: > für was soll am sich entscheiden Für das, was für dich sinnvoll ist. Dazu hast du keine Angaben gemacht.
Ben B. schrieb: > der ADC ... könnte ruhig 16 Bit haben. Gibt's halt nicht, und zwar aus gutem Grund. Hast du sonst noch unrealistische Wünsche, die man dir ausreden sollte?
Johannes F. schrieb: > Ich hatte mal überlegt, hier im Wiki ein Tutorial zu einem der neuen > AVRs (vielleicht 128DB28 oder 64EA28) zu beginnen, nach dem Vorbild des > alten ATmega8-Tutorials, also mit Assembler. Aber wozu in Assembler??? An der Assembler-Programmierung / Assembler-Befehlen hat sich doch überhaupt nix geändert. In C/C++ hingegenschon, weil die neueren[tm] Device-Header nicht mehr einfache C-Makros verwenden sondern Typedefs und Enums; und die sind in Assembler nicht verfügbar. (Was kein Problem des Assembler ist sondern wie die Device-Header erzeugt werden).
Johann L. schrieb: > Aber wozu in Assembler??? Ja ich weiß, darüber streiten sich die Geister. Es gibt jedenfalls vereinzelt im Forum immer noch Interessenten dafür, die AVRs in Assembler programmieren wollen. Johann L. schrieb: > An der Assembler-Programmierung / Assembler-Befehlen hat sich doch > überhaupt nix geändert. Am Befehlssatz zwar nur marginal, aber seit dem ATmega8 hat sich sehr viel im Bereich der Peripherie und anderen Aspekten getan, die es in einem Einstiegstutorial abzudecken gilt. Das AVR-Tutorial für den ATmega8 umfasste ja auch Timer, ADC, UART, SPI etc. Meine Absicht war/ist, ein ähnliches Tutorial mit ebendiesen Themen für einen neuen AVR zu beginnen.
Peter D. schrieb: > Will man einen Bootloader benutzen, ist das mit den neuen Typen deutlich > komplizierter, da der Bootloader nun an 0x0000 stehen muß. > Der Bootloader muß daher wissen, wo die Applikation startet. > Und die Applikation muß wissen, daß überhaupt ein Bootloader verwendet > wird und wo dieser endet. > Das alte Konzept mit Bootloader am Ende ist daher deutlich universeller. Kannst du heute immer noch haben. Einfach indem du NICHT in Bootloader- und App-Bereich segmentierst. Dann hast du einen einzigen großen Bootloaderbereich über den gesamten Flash, also exakt die gleiche Situation wie bei den Classic-Tinys. Und dementsprechend kannst du das dann auch genau so lösen, wie das bei den Classic-Tinys gelöst wurde. Bootloader am Ende, App immer ab 0, Bootloader patcht App beim Flashen (den einen Sprungbefehl auf dem Reset-Vektor). Der Vorteil ist: Die App selber muss vom Bootlader garnix wissen, der Linker muss nur wissen, dass der verfügbare Flash halt um das Stückchen kleiner ist, was der Bootloader belegt. Im Notfall geht es aber selbst ohne dieses Linker-Wissen. Dann muss halt der Bootloader darauf achten, dass er sich nicht selbst überschreibt (das sollte er ja sowieso). Dann führt eine zu große App halt nur dazu, dass das Bootloading fehlschlägt und nach dem Reset wieder der Bootloader startet. Der Nachteil dieser Lösung sollte in diesem Zshg. natürlich auch erwähnt werden: Der Sicherheitsgewinn, den die Segmentierung in Bootloader- und App-Bereich bietet, den verliert man so natürlich. Ja, die Lösung der Classic-ATMega war da schon deutlich eleganter. Insbesondere auch deshalb, weil die auch noch RWW konnten. Das können die neuen wohl leider garnicht mehr, wodurch Bootloading über bestimmte zeitkritische Bussysteme de facto unmöglich wird.
Peter D. schrieb: > > Ja, es ist sehr schwer, unter den vielen neuen AVRs was auszuwählen. > Inzwischen sind es 10 Familien: > - tinyAVR® 0 > - tinyAVR® 1 > - tinyAVR® 2 > - megaAVR® 0 > - AVR® DA > - AVR® DB > - AVR® DD > - AVR® EA > - AVR® EB > - AVR® SD Das ist nichts im Vergleich zu anderen. > Vermutlich gab es mal hohe Prämien für jede neue Familie. Hast du irgendeine Allergie gegen moderne Controllerserien? Du meckerst jedesmal gegen die neue Architektur. Das fällt auf. ;-)
Johann L. schrieb: > Aber wozu in Assembler??? > > An der Assembler-Programmierung / Assembler-Befehlen hat sich doch > überhaupt nix geändert. Nicht viel, aber einiges schon. Insbesondere bezüglich der Laufzeiten. > In C/C++ hingegenschon, weil die neueren[tm] Device-Header nicht mehr > einfache C-Makros verwenden sondern Typedefs und Enums; und die sind in > Assembler nicht verfügbar. (Was kein Problem des Assembler ist sondern > wie die Device-Header erzeugt werden). Also ich kann die Dinger wunderbar in Assembler programmieren. Mir wäre nicht aufgefallen, dass in den Device-Includes irgendwas fehlen würde. Enums sind natürlich zu defines umgerubelt und type-Gedöhns spielt in Asm zuwieso keinerlei Rolle, kann also problemlos und ersatzlos entfallen.
Beitrag #7858955 wurde von einem Moderator gelöscht.
> Gibt's halt nicht, und zwar aus gutem Grund. Hast du sonst noch > unrealistische Wünsche, die man dir ausreden sollte? Stimmt nicht. AnalogDevices hatte mal Controller (MCS51 basiert) mit 16Bit ADC. Aber halt zu entsprechenden Preisen. Vielleicht haben sie da ja einfach einen ihrer ADC mit in den Chip gebondet. :) Vanye
Vanye R. schrieb: > Vielleicht haben sie da ja einfach einen ihrer ADC mit in den Chip > gebondet. :) Gut möglich, warum nicht? Also nicht in den Chip, sondern daneben natürlich, ggf. auch darüber. Der wäre dann zumindest weit genug weg von all den Störungen, die sonst der Digitalteil der MCU verursacht. Inbesondere könnte er seine eigene separate Masseführung bekommen.
Bei den ganzen neuen Typen habe ich wohl den überblick verloren. Mit was kann ich den Atmega 128 und den Attiny 841 am besten ersetzen? Mit diesen beiden Typen habe ich viel gemacht, wird aber auch Zeit für was neues.
Beitrag #7859047 wurde von einem Moderator gelöscht.
Achim S. schrieb: > Mit was kann ich den Atmega 128 und den Attiny 841 am besten ersetzen? Evtl. AVR128DB64 bzw. ATtiny814/824 oder AVR16EB14
Den AVR128 DA 64 habe ich auf meiner Liste. Was ist der Unterschied zu DB? Und dann habe ich den Attiny 1616 oder 1606 oder 3216. Ist der Attiny 814 nicht ein "alter" Typ?
Achim S. schrieb: > Den AVR128 DA 64 habe ich auf meiner Liste. Was ist der Unterschied zu > DB? Vergleiche einfach mal die Datenblätter. Die DA-Familie hatte AFAIR noch ziemlich viele Silicon Errata, DB war dann besser. Die genauen Unterschiede weiß ich aber gerade nicht. Achim S. schrieb: > Und dann habe ich den Attiny 1616 oder 1606 oder 3216. Die tiny0-Serie ist eine abgespeckte Low-Cost-Version der 1-Serie, letztere hat z.B. einen 8-bit-DAC und 10-bit-ADC, die 2-Serie hat statt des DAC einen 12-bit-ADC. Gibt sicher noch mehr Unterschiede, darüber geben die Datenblätter Auskunft. Achim S. schrieb: > Ist der > Attiny 814 nicht ein "alter" Typ? Nö, das ist ein Vertreter der "neuen" tiny1-Serie mit UPDI. Der tiny841 dagegen ist ein "alter" mit ISP.
Hallo, Johann L. schrieb: > In C/C++ hingegenschon, weil die neueren[tm] Device-Header nicht mehr > einfache C-Makros verwenden sondern Typedefs und Enums; und die sind in > Assembler nicht verfügbar. In den alten Datenblättern gab es Bespiele in C wie man die Peripherie der Controller anspricht. Gibt es denn irgend wo eine Einführung wie das bei den neueren Typen in C/C++ funktioniert? rhf
Roland F. schrieb: > In den alten Datenblättern gab es Bespiele in C wie man die Peripherie > der Controller anspricht. > Gibt es denn irgend wo eine Einführung wie das bei den neueren Typen in > C/C++ funktioniert? Jetzt ist alles viel verständlicher. Z.B.: CLKSEL bedeutet Clock Select SINGLESLOPE bedeutet Single-Slope PWM CMP0EN bedeutet Compare Channel 0 Enable SAMPDUR bedeutet Sample Duration ADC_START_IMMEDIATE bedeutet ADC Start Immediate RUNSTDBY bedeutet Run in Standby INPUT_DISABLE bedeutet Input Disable usw.
Da man sowieso am besten die Zahl von verwendeten Typen begrenzen sollte (nur so kann man in Hobby die ausreichend kennenlernen), habe ich in AVR für mich schon lange zwei gewählt: ATMega1284 und AVR128DB. Erste paßt für alle "durchschnittlichen" Aufgaben. Zweite scheint für Kleinaufgaben konzipiert zu sein, dafür mehrere USARTs und zwei SPI, reiche Pin-Remapping. Nun überlege ich, mit STM32 zu beginnen. F103 scheint schon verältert, H7 haben 64 bit FPU, aber für Anfang wohl etwas zu kompliziert. Z.Z. denke ich von F4. F407 oder F429. Außer 32 bit FPU sind für mich 32 bit Timer interessant: für Aufgaben wie Frequenzmessen aller Art (z.B. ein Stimmgerät) sind die bequemer als gewöhnlichen 16 bit Timer. Es gibt auch viele andere interessante Sachen. Es gibt zwar "Nucleo" und "Discovery". Aber ich denke, am besten kann man MC kennenlernen, wenn man auch Platine selbst macht.
Fen ATmega1284 hätte ich auch empfohlen. Er ist vom Design her noch nahe am ATmega128, hat aber schon Debugwire. Ich habe für mich beschlossen, die neueren Serien links liegen zu lassen und mich stattdessen mit ARM Cortex M basierten Controllern zu beschäftigen. Man kann nicht alles gleichzeitig lernen, macht im Hobby auch wenig Sinn.
Roland F. schrieb: > Gibt es denn irgend wo eine Einführung wie das bei den neueren Typen in > C/C++ funktioniert? Von Microchip gibt es App Notes "Getting Started". Die findet man auf den Controller Seiten unter Dokumente, dort wo man auch das Controller Manual findet. Es lohnt sich quer über alle verwandten Serien zu schauen. In den App Notes gibt es auch Links zu GitHub Microchip. Einen kleinen Einstieg gibt es auch hier. https://forum.arduino.cc/t/nano-every-atmega4809-am-anfang-stand-der-anfang/701185 Das Verständnis kann man auf alle Verwandten übertragen.
Sherlock 🕵🏽♂️ schrieb: > Fen ATmega1284 hätte ich auch empfohlen. Er ist vom Design her noch nahe > am ATmega128, hat aber schon Debugwire. JTAG ist interessanter als Debugwire. Damit bekommt man zwar ein MC mit nur 28 freien Pins, aber JTAG ist bequemer in Arbeit. ATmega2560 noch als Variante: auch JTAG und deutlich mehr Pins, 4x USARTs. Aber die sind letzte Zeit unverhältnismäßig teuer. Trotzdem haben die fehlende bei auch neueren AVR128DB64 Interface für externe SRAM, deshalb halte ich AVR128DB eher für kleinere Sachen konzipiert. Aber auch wie bei STM32 muß man 0,5 mm Pins löten können. Vorteil von alten AVRs ist bessere Code-Verständlichkeit. Selbstverständlich wenn man MC ohne Arduino benutzt :)
Maxim B. schrieb: > fehlende bei auch neueren AVR128DB64 Interface für externe > SRAM Hmmm... ich denke, die Zeiten von MCUs mit extern dran gepapptem RAM sind vorbei. Wenn viel RAM (mehr als 16 KiB) benötigt wird, sind dann doch wirklich 32-bitter à la Cortex M0+ aufwärts angesagt.
Maxim B. schrieb: > Trotzdem > haben die fehlende bei auch neueren AVR128DB64 Interface für externe > SRAM, deshalb halte ich AVR128DB eher für kleinere Sachen konzipiert. Bis 16k SRAM, 128k Flash, bis 64 Pins. Für kleinere Sachen? Das Ding steuert meine Modelleisenbahn. Zudem man gar nicht so viele Pins der MCU verwendet, man nutzt dennoch I2C und SPI Bus. > Vorteil von alten AVRs ist bessere Code-Verständlichkeit. Verstehe ich nicht. Insgesamte eine seltsame Logik für mich.
Johannes F. schrieb: > ich denke, die Zeiten von MCUs mit extern dran gepapptem RAM > sind vorbei. Trotzdem findet man bei STM32 sehr reiche Auswahl von solch Schnitstellen. Veit D. schrieb: > Bis 16k SRAM, 128k Flash, bis 64 Pins. Für kleinere Sachen? und statt 10 000 Umprogrammierungen nur 1000. Auch 1000 nicht immer (zwar bei AVR128DA, laut Fehlerbeschreibung). 16k SRAM, 128k Flash hat auch ATmega1284
Veit D. schrieb: >> Vorteil von alten AVRs ist bessere Code-Verständlichkeit. > Verstehe ich nicht. Insgesamte eine seltsame Logik für mich. Dito, verstehe die Aussage auch nicht. Ich finde den Code für die "neueren" Peripheriemodule wesentlich einfacher verständlich und nachvollziehbar, allein schon wegen der "sprechenderen" Symbole auch der Assembler-Include-Files. Wenn man mal an URSEL u.a. "Krücken" der alten mega8-UART zurückdenkt, die damals noch notwendig waren wegen der Mehrfachnutzung mancher Register-Adressen...
Maxim B. schrieb: > und statt 10 000 Umprogrammierungen nur 1000 Das ist mir auch aufgefallen – da wurde offenbar in den meisten neuen Serien an irgendeinem Prozess gespart. Würde mich mal interessieren, was genau dafür entscheidend ist, wie oft ein Flash geschrieben werden kann. Allein bei der EA-Serie werden noch 10.000 Schreibzyklen im Datenblatt garantiert, ebenso bei den neuen ATtinys. Das ist tatsächlich ein Grund für mich, AVR-EA und tiny1/2 gegenüber den anderen zu bevorzugen.
Einziges, was bei alten Megas eindeutig schlecher ist, das ist I2C. Auch USART, falls man gleichzeitig mehrere nicht gewöhnlichen Baudraten braucht, paßt bei AVR128 besser. Aber um eine Ordnung schlechtere Ressource von Flash...
Maxim B. schrieb: > Aber um eine Ordnung schlechtere > Ressource von Flash... Wie sieht es mit den Flash-Zyklen eigentlich bei den PICs aus, da machen die Datenblätter nämlich gar keine Angabe dazu?
Johannes F. schrieb: > Allein bei der EA-Serie werden noch 10.000 Schreibzyklen im Datenblatt > garantiert Bei AT90USB1286/87 steht sogar 100 000 write/erase cycles Je weiter, umso schlechter alles...
Maxim B. schrieb: > Veit D. schrieb: >> Bis 16k SRAM, 128k Flash, bis 64 Pins. Für kleinere Sachen? > und statt 10 000 Umprogrammierungen nur 1000. Auch 1000 nicht immer > (zwar bei AVR128DA, laut Fehlerbeschreibung). > > 16k SRAM, 128k Flash hat auch ATmega1284 Was hat die Flash Anzahl mit kleinen Sachen zu tun? Man kann locker mehr wie 1000x flashen. Hast du schon eine MCU tot geflasht? Im Produktivsystem nimmt man sowieso nicht seinen Entwicklungscontroller. Ein ATmega1284 hat andere Hardwareinheiten. Äpfel vs. Birnen. Mir ist grundsätzlich egal welchen Controller du oder irgendjemand verwendet. Nur gehen mit die Vergleiche auf den Sack die hinten und vorne nicht stimmen. Untermauert mit an den Haaren herbeigezogenen Scheinschutzbehauptungen.
Veit D. schrieb: > Mir ist grundsätzlich egal welchen Controller du oder irgendjemand > verwendet. Mir ist auch egal, welchen COntroller du verwendest.
Johannes F. schrieb: > Maxim B. schrieb: >> Aber um eine Ordnung schlechtere >> Ressource von Flash... > > Wie sieht es mit den Flash-Zyklen eigentlich bei den PICs aus, da machen > die Datenblätter nämlich gar keine Angabe dazu? "die" PICs. gibts nicht. Bei den 8-Bittern wie dem 16LF19176, den ich gerade vor mir habe, sind es 10k Zyklen. Wie es bei 300MHz MIPS PIC32 Typen aussieht, weiß ich nicht - da müsste ich nachschauen. Und "da machen die Datenblätter nämlich gar keine Angabe dazu" stimmt auch nicht, das steht da schon drin. fchk
Frank K. schrieb: > Und "da > machen die Datenblätter nämlich gar keine Angabe dazu" stimmt auch > nicht, das steht da schon drin. Ah, stimmt, gerade nochmal beim PIC18F57Q43 gesucht: https://ww1.microchip.com/downloads/aemDocuments/documents/MCU08/ProductDocuments/DataSheets/PIC18F27-47-57Q43-Microcontroller-Data-Sheet-XLP-DS40002147.pdf Seite 897, Table 47-5. Memory Programming. Dieser Typ hat auch nur 1.000 garantiert. Bei den AVRs steht es immer direkt am Anfang unter Features, deshalb hatte ich es bisher bei den PICs nicht gefunden.
Veit D. schrieb: > Man kann locker mehr wie 1000x flashen. > Hast du schon eine MCU tot geflasht? > Im Produktivsystem nimmt man sowieso nicht seinen > Entwicklungscontroller. Das sehe ich auch so. Vor vielen Jahren gab es diese Einschränkungen bei Renesas, wo GLYN (?) das mal getestet hatte und (wenn ich mich richtig erinnere) nach >= 20000 Programmierzyklen keine Probleme feststellen konnte. Einzig bei Raumfahrtanwendungen sollte man sich strickt an 1000 halten ;-) Bei den neueren AVRs haben mich immer die Timer abgeschreckt - etwas schräg, wenn man zuvor die einfachen Timer kannte, die für meine Anwendungen völlig ausreichten. Vorteil der AVRs ist immer noch der große Versorgungsspannungbereich bis 5 V und der rel. kleine Preis. Wenn man etwas "Neues" zum Spielen sucht, würde ich zu Cortex-M0 raten aber nicht unbedingt zum o.g. RP2040, sondern eher STM32G031/431 mit verschiedenen Gehäusetypen von extrem sparsam bis sehr leistungsfähig.
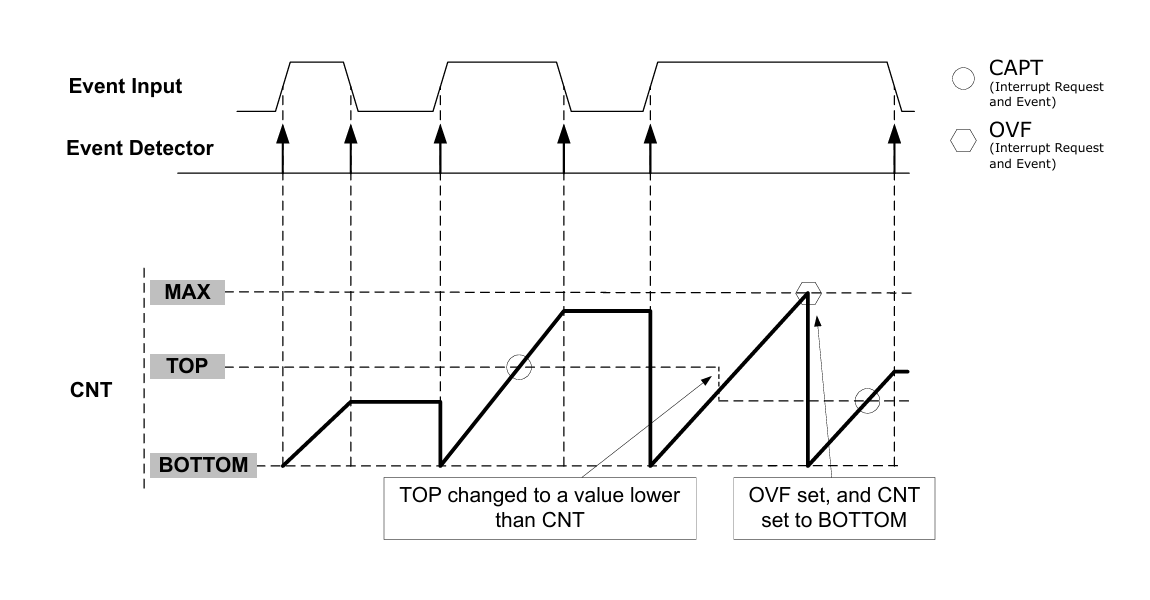
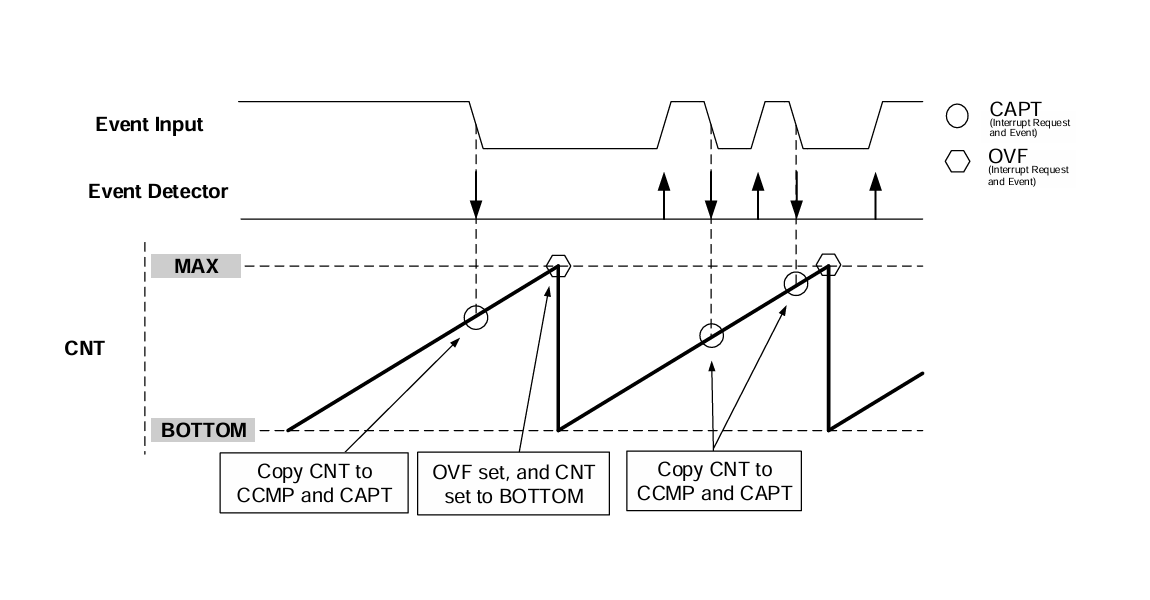
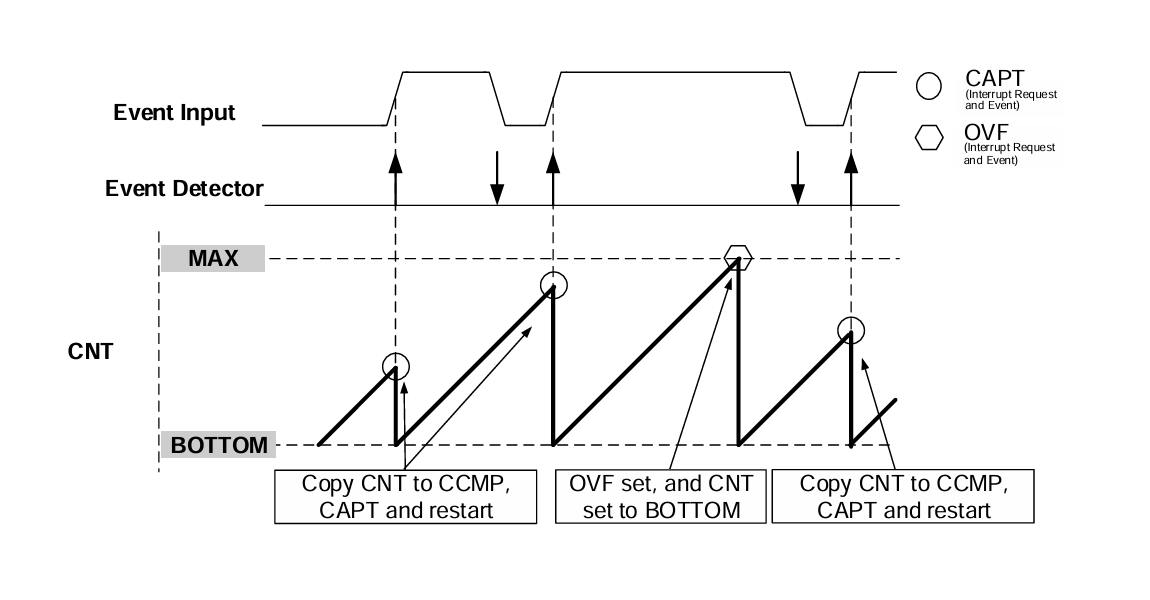
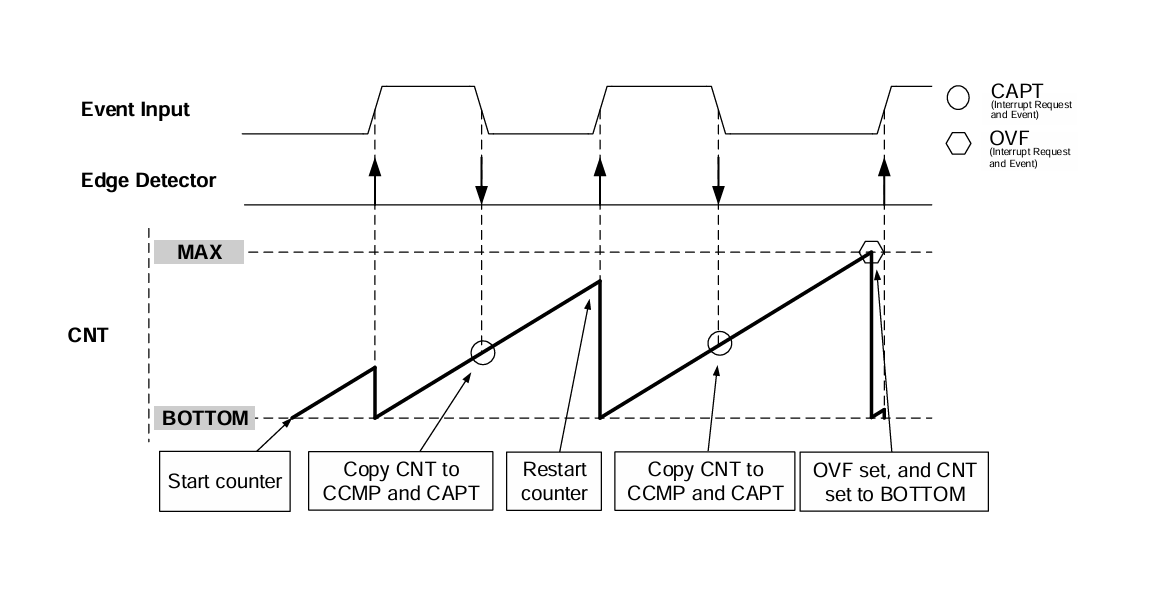
Mi N. schrieb: > Bei den neueren AVRs haben mich immer die Timer abgeschreckt - etwas > schräg, wenn man zuvor die einfachen Timer kannte, die für meine > Anwendungen völlig ausreichten. Ich finde die neuen Timer grundsätzlich besser, auch wenn man sich natürlich erstmal umgewöhnen muss, aber sie können halt wesentlich mehr. Zugegebenermaßen habe ich von den neuen Features auch noch keinen Gebrauch gemacht, aber es gibt ja allein schon wesentlich mehr Ressourcen in Form von mehr 16-bit breiten Timern und mehr gleichzeitigen Clear-on-Compare-Match-Möglichkeiten (da ja auch von vornherein die Periodendauer in dedizierten Registern festgelegt wird und nicht mehr per default bis 2^n gezählt wird wie bei den alten Timern). Insgesamt finde ich die Nutzung daher bequemer. Nur die teils inkonsistente Benennung von Flags etc. zwischen den verschiedenen Timertypen ist etwas verwirrend.
Habe mir eure Meinung dazu gründlich durchgelesen. Zum Attiny1616: Ein 8 Bit reicht für die meisten Anwendungen aus. Wenn man mehr machen will kann man ja immer noch einen 32 Bit nehmen. Für die meisten Anwendungen reichen auch ca. bis zu 16 GPIO zuzüglich 2x I2C Bus. SPI sei mal vernachlässigt. ADC und DAC sind auch dabei. Betriebsspannung 5V oder 3,3V mit Pegelwandler. Bauform SOIC 20 Pins. Etwas grösser: der Attiny 3216 mit gleicher Belegung und gleiche Bauform. Hauptrechner z.B. RP2040, abgester Prozessor für einzelne Teilaufgaben Attiny 1616. Sehe ich das so richtig?
Hallo Axel S. schrieb: > * wofür du die Werkzeuge schon hast (Toolchain, Programmer, etc) > > * wofür du Hilfe bekommen kannst (vulgo: was die anderen nehmen) Volle Zustimmung, es gibt, zumindest im Hobbybereich und für "normale Anwender, nicht dümmeres, irgendwelche nicht breit durch andere Hobbyisten, Modellbauer, Funkamateure,... genutzte und mit Programmen und "Schichten" unterstützte µC zu nutzen. Auch wenn mich einige jetzt steinigen werden: Der µC (fertige Boards) muss vom Arduinouniversum unterstützt werden (also auch die IDE) auch via Aliexpress als Board (Jehova, er hat Jehova gesagt...) als Clone beschaffbar sein und einfach (als Board aber auch als Chip) problemlos "überall" ohne Wartezeiten durch (mal wieder irgendwo ein Sack Reis umgefallen...) den Hersteller zu beziehen Dadurch ergibt sich automatisch auch das, der µC Preiswert ist und zu einer großen Familie gehört - der Preis hat ja erstaunlich wenig mit der "Rechenleistung" und den Schnittstellen zu tun. Ein PIC 16F84 aber auch ein ATMega 8 ist als Chip z.B. mittlerweile oft teurer als ein ESP32 Board das ja unvergleichlich mehr an Leistung und Schnittstellen bietet. Andererseits: So einen PIC16F84, einen ATMega8 usw. bekommt man auch heute noch quasi neu (NOS) problemfrei (halt zu Freudenhauspreisen, aber man bekommt sie...). Eben weil sie einstmals weit verbreitet auch in Hobbykreisen waren und zumindest was den ATMega8 angeht immer noch durch das Arduiniunversum unterstützt wird und auch alle Anwenderinfos (durch andere Anwender) und Projekte im Netz vorhanden sind.
Johannes F. schrieb: > Würde mich mal interessieren, was genau dafür entscheidend ist, wie oft > ein Flash geschrieben werden kann. Könnte an kleineren Strukturen liegen. Dadurch sind sie ja insgesamt billiger – die alten AVRs wurden noch auf vergleichsweise grobschlächtigen Prozessen hergestellt.
Achim S. schrieb: > Hauptrechner z.B. RP2040, abgester Prozessor für einzelne Teilaufgaben > Attiny 1616. > Sehe ich das so richtig? Ergibt wenig Sinn. AFAIK ist es kaum üblich, "für einzelne Teilaufgaben" extra getrennte MCUs zu verwenden. Es sei denn, räumliche Entfernung legt das nahe.
Darius schrieb: > einen ATMega8 usw. bekommt man auch heute noch quasi > neu (NOS) problemfrei (halt zu Freudenhauspreisen, aber man bekommt > sie...). Der ATmega8 wird sogar noch hergestellt (bei Microchip.com als "active" gekennzeichnet). Jedoch vermutlich nur in kleinen Stückzahlen und deshalb so teuer. Kann mir kaum vorstellen, dass der gewerblich noch für Neuentwicklungen eingesetzt wird, weil Preis und Ausstattung inzwischen in keinem akzeptablen Verhältnis mehr stehen, wenn man mit neueren Typen bzw. 32-bit vergleicht.
Jörg W. schrieb: > Könnte an kleineren Strukturen liegen. Dadurch sind sie ja insgesamt > billiger – die alten AVRs wurden noch auf vergleichsweise > grobschlächtigen Prozessen hergestellt. Da wurden die einzelnen Bits noch mit Ziegeln gemauert! Deutsche Wertarbeit! Ach nee, waren ja Norwerger . . . ;-) Naja, 1000 Schreibzyklen ist für einen einen Controller auf dem Testboard schon eher wenig, ne Null dahinter wäre OK. Aber wenn's nicht gerade ein BGA ist, kann man so ein Ding meistens mit Heißluft schnell wechseln und dann geht's weiter.
Georg M. schrieb: > Ich bräuchte den AVR16EA14 - gibt es leider nicht. :( Klar. Je größer und unüberschaubarer das Angebot, umso mehr "braucht" man nicht verfügbare Exoten . . .
Die Diskussion um Schreibzyklen erinnert schon ein wenig an die stets unterschwellig vorhandene (Reichweiten-)Panik bei SSDs. Die wenigen, welche tatsächlich mal einen Datenverlust hatten, hatten natürlich in all den Jahrzehnten zuvor nie einen Festplattencrash zu beklagen. Ich selbst habe in meinem Leben schon einige µController zerlegt, praktisch immer aus Unachtsamkeit. Niemals wegen zu geringer Schreibzyklen. Und angenommene täglich fünfzig Schreibvorgänge bei 200 Arbeitstagen verursachen mir jetzt auch keine schlaflosen Nächte. Die letzten Bauteile die diesbezüglich mal versagt hatten, waren 2708/2716 irgendwann in den Achtzigern. (Ja, die mit den Quarzglasfenstern und dem Faible für Sonnenbänke)
Mi N. schrieb: > Bei den neueren AVRs haben mich immer die Timer abgeschreckt - etwas > schräg, wenn man zuvor die einfachen Timer kannte, die für meine > Anwendungen völlig ausreichten. Schrecken dich die Timer immer noch ab? Glaube ich doch nicht bei dir. Oder hatten sie dich abgeschreckt? Die alten Timer sind sozusagen Multi-Kulti. Die neuen Timer sind spezialisierter. Man hat das Gefühl man hätte davon immer zu wenig. Das Einzigste was mich etwas stört ist der eingeschränkte Prescaler von TCA. Dafür ist die Handhabung einfacher gewurden, wenn man es im Gesamten betrachtet. Man muss bspw. keinen Overload mehr beachten, man kaskadiert den nächsten TCB dazu, bis der Zählumfang für einen passt. Die TCBs sind die perfekten "Mess-Timer" für alles. Für deinen präzisen Frequenzzähler kann man wie bei anderen den Komparator davor schalten usw.. Eigentlich benötige ich nur einen AVR128DB oder einen AVR64EA. Letzterer hat immer 4x TCB dabei und hat seltsamerweise 10.000 Flash cycles im Datenblatt stehen. Vielleicht hat auch jemand bei den 1.000er eine Null vergessen. Kann alles sein. :-)
Georg M. schrieb: > Ich bräuchte den AVR16EA14 - gibt es leider nicht. :( Schneidet man paar Pins ab, dann passt das.
Falk B. schrieb: > Naja, 1000 Schreibzyklen ist für einen einen Controller auf dem > Testboard schon eher wenig, ne Null dahinter wäre OK. Man darf nicht vergessen: diese Haltbarkeiten sind die Garantiezeiten unter Extrembedingungen, also bei Tmax. Für reinen Laborbetrieb kannst du da problemlos noch eine Null dranhängen. Allerdings würde ich natürlich einen Controller, der in der Entwicklung schon einige hundert Zyklen hinter sich hat, nicht danach produktiv in einem Gerät einsetzen.
Beitrag #7859433 wurde von einem Moderator gelöscht.
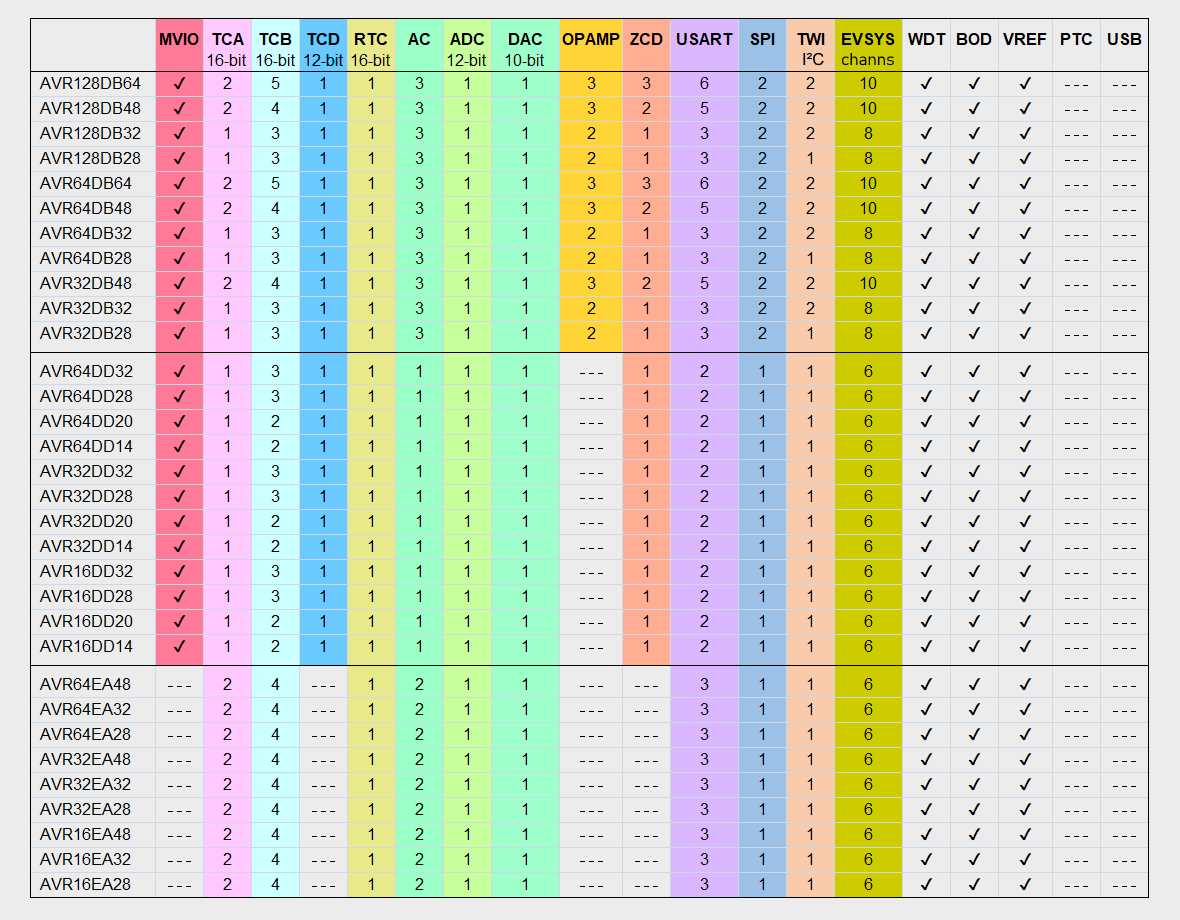
Johann L. schrieb: > 0-Series: ATtiny202, ATtiny204, ATtiny402, ATtiny404, ATtiny406, > ATtiny804, ATtiny806, ATtiny807, ATtiny1604, ATtiny1606, ATtiny1607, > ATmega808, ATmega809, ATmega1608, ATmega1609, ATmega3208, ATmega3209, > ATmega4808, ATmega4809, > > 1-Series: ATtiny212, ATtiny214, ATtiny412, ATtiny414, ATtiny416, > ATtiny416auto, ATtiny417, ATtiny814, ATtiny816, ATtiny817, ATtiny1614, > ATtiny1616, ATtiny1617, ATtiny3214, ATtiny3216, ATtiny3217. > > 2-Series: ATtiny424, ATtiny426, ATtiny427, ATtiny824, ATtiny826, > ATtiny827, ATtiny1624, ATtiny1626, ATtiny1627, ATtiny3224, ATtiny3226, > ATtiny3227. > > AVRrc: ATtiny4, ATtiny5, ATtiny9, ATtiny10, ATtiny102, ATtiny104, > ATtiny20, ATtiny40. > > AVR-Dx: AVR16DD14, AVR16DD20, AVR16DD28, AVR16DD32, AVR16DU14, > AVR16DU20, AVR16DU28, AVR16DU32, AVR32DA28, AVR32DA32, AVR32DA48, > AVR32DB28, AVR32DB32, AVR32DB48, AVR32DD14, AVR32DD20, AVR32DD28, > AVR32DD32, AVR32DU14, AVR32DU20, AVR32DU28, AVR32DU32. > > AVR-Ex: AVR16EA28, AVR16EA32, AVR16EA48, AVR16EB14, AVR16EB20, > AVR16EB28, AVR16EB32, AVR32EA28, AVR32EA32, AVR32EA48. > > AVR-SD: AVR32SD20, AVR32SD28, AVR32SD32. > > Bei den größeren AVR-Dx und AVR-Ex Teilen mit ≥ 64KiB Programmspeicher > ist immerhin ein 32KiB Segment im SRAM-Adressraum zu sehen. Welches, > kann man in den GNU Tools per Kommandozeilen-Option auswählen: > > AVR64DA28, AVR64DA32, AVR64DA48, AVR64DA64, AVR64DB28, AVR64DB32, > AVR64DB48, AVR64DB64, AVR64DD14, AVR64DD20, AVR64DD28, AVR64DD32, > AVR64DU28, AVR64DU32, AVR64EA28, AVR64EA32, AVR64EA48, AVR64SD28, > AVR64SD32, AVR64SD48, AVR128DA28, AVR128DA32, AVR128DA48, AVR128DA64, > AVR128DB28, AVR128DB32, AVR128DB48, AVR128DB64. Mich würde mal interessieren, woher ihr die übersichtlichen Darstellungen habt. Wahrscheinlich bin ich einfach zu blöd, aber bei Microchip finde ich nichts dazu. Auch so eine Darstellung wir hier: Beitrag "Re: Moderne AVR (Nachfolger Atmega und Attiny)" hatte ich bisher nicht gefunden. Auf der Webseite von MC gibt es gar keinen Hinweis, das so etwas wie die Mega0-Serie existiert. Danke im Voraus!
Veit D. schrieb: > Hast du irgendeine Allergie gegen moderne Controllerserien? > Du meckerst jedesmal gegen die neue Architektur. Das fällt auf. ;-) Aber nicht gegen neue Features an sich, sondern gegen die Unübersichtlichkeit und die ständig neuen Namensgebungen. Die Bezeichnung AVR32 war doch schon belegt und nun gibt es zusätzlich AVR32, die gar keine 32Bitter sind. Warum ist es nur so schwer, sich endlich mal an eine gewählte Namensgebung zu halten. Die Unterschiede der neuen Familien untereinander muß man oft mit der Lupe suchen, so gering sind sie. Wenn man da einfach beim Pflichtenheft ein wenig mehr zusammengearbeitet hätte, würde man bequem mit unter 20% der Typenvielfalt auskommen. Man bekommt den Eindruck, da sitzen viele verschiedene Teams in jeweils ihrem eigenen Elfenbeinturm und schauen weder links noch rechts.
Peter D. schrieb: > Man bekommt den Eindruck, da sitzen viele verschiedene Teams in jeweils > ihrem eigenen Elfenbeinturm und schauen weder links noch rechts. Ich glaube eher, den Leuten ist langweilig und man bläst die Produktpalette einfach nur auf ;-)
Michael S. schrieb: > Johann L. schrieb: >> 0-Series: ATtiny202, ATtiny204, ATtiny402, ATtiny404, ATtiny406, >> ATtiny804, ATtiny806, ATtiny807, ATtiny1604, ATtiny1606, ATtiny1607, >> ATmega808, ATmega809, ATmega1608, ATmega1609, ATmega3208, ATmega3209, >> ATmega4808, ATmega4809, >> >> 1-Series: ATtiny212, ATtiny214, ATtiny412, ATtiny414, ATtiny416, >> ATtiny416auto, ATtiny417, ATtiny814, ATtiny816, ATtiny817, ATtiny1614, >> ATtiny1616, ATtiny1617, ATtiny3214, ATtiny3216, ATtiny3217. >> >> 2-Series: ATtiny424, ATtiny426, ATtiny427, ATtiny824, ATtiny826, >> ATtiny827, ATtiny1624, ATtiny1626, ATtiny1627, ATtiny3224, ATtiny3226, >> ATtiny3227. >> >> AVRrc: ATtiny4, ATtiny5, ATtiny9, ATtiny10, ATtiny102, ATtiny104, >> ATtiny20, ATtiny40. >> >> AVR-Dx: AVR16DD14, AVR16DD20, AVR16DD28, AVR16DD32, AVR16DU14, >> AVR16DU20, AVR16DU28, AVR16DU32, AVR32DA28, AVR32DA32, AVR32DA48, >> AVR32DB28, AVR32DB32, AVR32DB48, AVR32DD14, AVR32DD20, AVR32DD28, >> AVR32DD32, AVR32DU14, AVR32DU20, AVR32DU28, AVR32DU32. >> >> AVR-Ex: AVR16EA28, AVR16EA32, AVR16EA48, AVR16EB14, AVR16EB20, >> AVR16EB28, AVR16EB32, AVR32EA28, AVR32EA32, AVR32EA48. >> >> AVR-SD: AVR32SD20, AVR32SD28, AVR32SD32. >> >> Bei den größeren AVR-Dx und AVR-Ex Teilen mit ≥ 64KiB Programmspeicher >> ist immerhin ein 32KiB Segment im SRAM-Adressraum zu sehen. Welches, >> kann man in den GNU Tools per Kommandozeilen-Option auswählen: >> >> AVR64DA28, AVR64DA32, AVR64DA48, AVR64DA64, AVR64DB28, AVR64DB32, >> AVR64DB48, AVR64DB64, AVR64DD14, AVR64DD20, AVR64DD28, AVR64DD32, >> AVR64DU28, AVR64DU32, AVR64EA28, AVR64EA32, AVR64EA48, AVR64SD28, >> AVR64SD32, AVR64SD48, AVR128DA28, AVR128DA32, AVR128DA48, AVR128DA64, >> AVR128DB28, AVR128DB32, AVR128DB48, AVR128DB64. > > Mich würde mal interessieren, woher ihr die übersichtlichen > Darstellungen habt. Naja, ich weiß halt, welche Device-Familie welche Eigenschaft hat: Flash im RAM-Space haben avrtiny (alle), avrxmega3 (alle), avrxmega2 (nur AVR*) und avrxmega4 (nur AVR*). Dann hab ich die entsprechenden Devices kopiert von https://gcc.gnu.org/onlinedocs/gcc/AVR-Options.html und nach Serie sortiert. Von Hand :-) .
Johannes F. schrieb: > Wenn man mal an URSEL u.a. "Krücken" der alten mega8-UART zurückdenkt, > die damals noch notwendig waren wegen der Mehrfachnutzung mancher > Register-Adressen... Oder das bis zum bitteren Ende konsequent durchgeschleppte Fehldesign von ADCSR(n)...
Peter D. schrieb: > Die Bezeichnung AVR32 war doch schon belegt und nun gibt es zusätzlich > AVR32, die gar keine 32Bitter sind. Nein, gibt es nicht. Was es jetzt tatsächlich zusätzlich gibt, sind AVR32D... > Warum ist es nur so schwer, sich > endlich mal an eine gewählte Namensgebung zu halten. Weil es halt unbedingt ein neues Namensschema sein sollte. Seien wir froh, dass es wenigstens ein nachvollziehbares Schema geworden ist. Hätte ja auch völliger Wildwuchs wie bei den PICs entstehen können. > Die Unterschiede der neuen Familien untereinander muß man oft mit der > Lupe suchen, so gering sind sie. Das allerdings ist leider wahr. Hat allerdings den Vorteil, dass es oft sehr einfach ist, ein replacement part zu bestimmen, was mit minimalsten oder sogar ohne jegliche Änderungen in ein bestehendes Design paßt. Wenn die Liefersituation oder die Preisgestaltung das wünschenswert erscheinen lassen.
Peter D. schrieb: > Veit D. schrieb: >> Hast du irgendeine Allergie gegen moderne Controllerserien? >> Du meckerst jedesmal gegen die neue Architektur. Das fällt auf. ;-) > > Aber nicht gegen neue Features an sich, sondern gegen die > Unübersichtlichkeit und die ständig neuen Namensgebungen. > Die Bezeichnung AVR32 war doch schon belegt und nun gibt es zusätzlich > AVR32, die gar keine 32Bitter sind. Warum ist es nur so schwer, sich > endlich mal an eine gewählte Namensgebung zu halten. Naja, du unterschlägst die nachfolgende Bezeichnung des Schemas. Das ist glasklar. AVR + Flashgröße + Serie + Pinanzahl. Die 32 jetzt nichts mit 32Bit zu tun. Es ist die Flashgröße. An dieser Stelle stehen auch andere Zahlen für andere Flashgrößen. Welches Namenschema hättest du erdacht? > Die Unterschiede der neuen Familien untereinander muß man oft mit der > Lupe suchen, so gering sind sie. Wenn man da einfach beim Pflichtenheft > ein wenig mehr zusammengearbeitet hätte, würde man bequem mit unter 20% > der Typenvielfalt auskommen. In meinen Augen ist das eine Erhöhung der Ausbeute. Ist bei anderen Firmen und Controllerfamilien nicht anders.
Michael S. schrieb: > Auf der Webseite von MC gibt es gar keinen Hinweis, das so etwas wie die > Mega0-Serie existiert. Zur Mega0 Serie zählt zum Bsp. ein ATmega4809, als größter Typ der Serie. Die Serie wird scheinbar nicht weiter ausgebaut. Ich denke mit den neuen ATtiny und AVR Serien ist alles abgedeckt. Die Mega0 Serie war laut meines Wissens die Erste mit der neuen Architektur. Kann man gut zu den Alten unterscheiden, alles was UPDI als Programmierschnittstelle hat, hat die neue Architektur.
Achim S. schrieb: > Welchen AVR Achim S. schrieb: > Bei den ganzen neuen Typen habe ich wohl den überblick verloren. Dann vielleicht Achim S. schrieb: > doch den RP2040 Dieser Controller und seine Brüder machen es einem leicht, den Überblick zu bewahren ;-) Zudem kostet er fast nichts.
Yalu X. schrieb: > Achim S. schrieb: >> doch den RP2040 > > Dieser Controller und seine Brüder machen es einem leicht, den Überblick > zu bewahren ;-) Immerhin hat man aktuell wohl noch die Qual der Wahl zwischen entweder (1) nur eingeschränkt brauchbarem ADC oder (2) dauerhaft/irreversibel aktivierten Pull-Downs an einigen Pins. :D
Johannes F. schrieb: > dauerhaft/irreversibel > aktivierten Pull-Downs an einigen Pins. Quelle? Oder macht's einfach nur Spaß so etwas von sich zu geben?
Norbert schrieb: > Johannes F. schrieb: >> dauerhaft/irreversibel >> aktivierten Pull-Downs an einigen Pins. > > Quelle? > > Oder macht's einfach nur Spaß so etwas von sich zu geben? Beitrag "Pico2 RP2350 GPIO Fehler"
Sollte sich das etwa auf den einzigen offiziellen GPIO Eintrag RP2350-E9 beziehen? Da geht's um etwas völlig anderes. Nämlich dass ein offener, extrem hochohmiger, schwebender Eingang nicht wieder automagisch auf Low fällt wenn ein zuvor angelegtes High weggenommen wird. Das kann man mit einem externen Pull-Down von ca. 8kΩ…9kΩ beheben. Was nur dann eventuell zu einem Problem werden könnte, wenn man dynamisch zwischen I und O umschalten möchte. Aber auch das Problem lässt sich im Normalfall vermeiden und lösen. Außer - und das ist der einzige mir bekannte Fall - wenn das Ganze ausschließlich im Rahmen eines PIO Programms stattfinden soll. Also bitte, demnächst dann richtig kommentieren.
Norbert schrieb: > Nämlich dass ein offener, extrem > hochohmiger, schwebender Eingang nicht wieder automagisch auf Low fällt > wenn ein zuvor angelegtes High weggenommen wird. OK, also quasi ein dauerhafter interner Pull-Up statt -Down, hatte ich wohl verwechselt. Norbert schrieb: > Das kann man mit einem externen Pull-Down von ca. 8kΩ…9kΩ beheben. "8…9 kΩ" sind für mich aber nicht "extrem hochohmig". Insofern ist das schon ein relativ schwerwiegender Silicon Bug, finde ich.
Johannes F. schrieb: > Norbert schrieb: >> Nämlich dass ein offener, extrem >> hochohmiger, schwebender Eingang nicht wieder automagisch auf Low fällt >> wenn ein zuvor angelegtes High weggenommen wird. > > OK, also quasi ein dauerhafter interner Pull-Up statt -Down, hatte ich > wohl verwechselt. Nein, es bedeutet dass sich ein frei *schwebender* Eingang im Megaohm Bereich anders verhält als beim 2040. Er verhält sich eher wie ein nicht mehr zurück schnappender Schmitt-Trigger. Wie gesagt, frei in der Luft schwebend (oder wenn sehr hochohmig angesteuert) > Norbert schrieb: >> Das kann man mit einem externen Pull-Down von ca. 8kΩ…9kΩ beheben. > > "8…9 kΩ" sind für mich aber nicht "extrem hochohmig". Das habe ich so auch nicht geschrieben. > Insofern ist das > schon ein relativ schwerwiegender Silicon Bug, finde ich. Das sei dir unbenommen. Ein offen in der Luft baumelnder Draht kann dann Probleme verursachen. Allerdings, wenn der Eingang von irgend etwas im wenige µA Bereich angesteuert wird, ist das Problem verschwunden.
Angehängte Dateien:
-

AVR_SD_MCU.png
170 KB
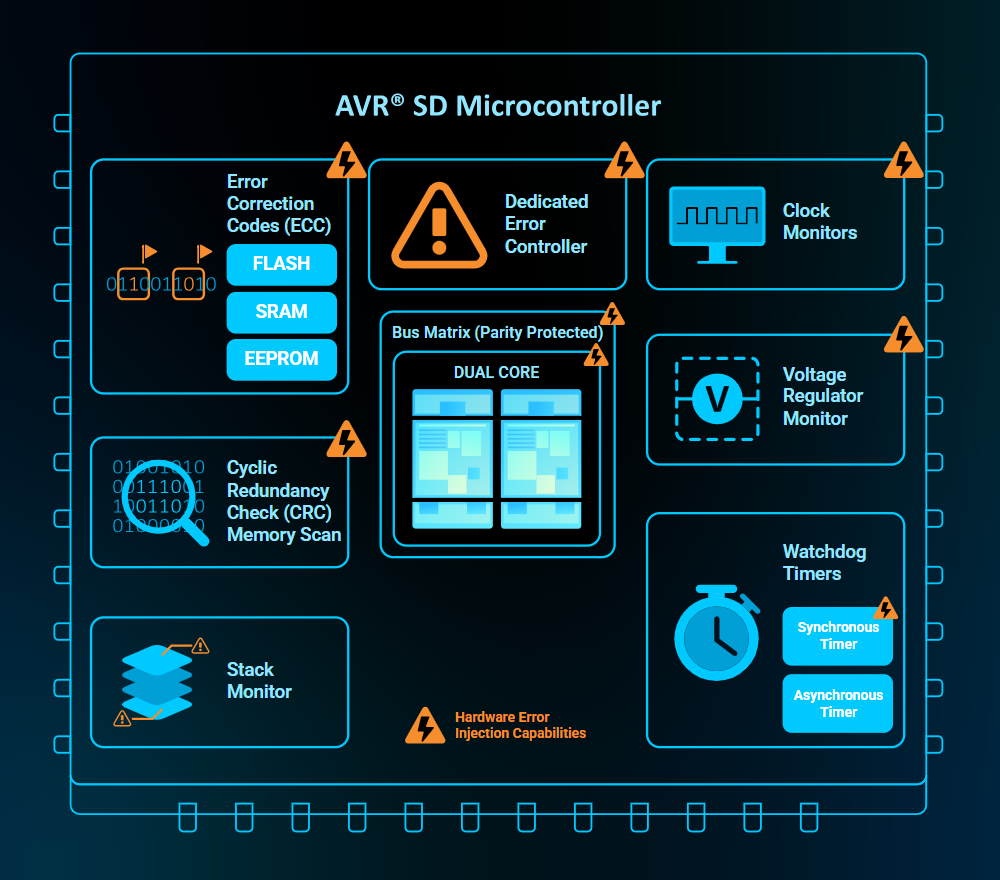
Für erhöhte Sicherheitsanforderungen (also nicht für Bastler): The AVR® SD Family https://www.microchip.com/en-us/products/microcontrollers-and-microprocessors/8-bit-mcus/avr-mcus/avr-sd
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.