Kennt jemand einen Algorithmus für einen Sinus, gfs als Näherung, der bei ähnlicher Genauigkeit schneller ist, als CORDIC? Ich hätte da eine Ansteuerung für eine Leistungselektronik, die mehrere Sinusfunktionen erfordert, deren Werte sich sehr schnell ändern können. Der FPGA läuft aus Wärmegründen nur mit 40 MHz. Die Cordic-Funktion, die ich brauche, arbeitet bei der erforderlichen Genauigkeit mit 24 Takten und ist bei der Anzahl der Kanäle auch ziemlich ausgelastet. Es müssen aber 6 Phasen mit Sinus und Cosinus versorgt werden, sodas die Berechnungszeit in Richtung 72 Takten geht und die daraus entstehenden unter 500 kHz Latenz nicht reicht, um mehrere Kanäle zu steuern. Um die Zahl der parallelen Cordic core zu reduzieren, wäre eine schnellere Funktion hilfreich. 90°-RAM-Sinus ist nicht möglich, weil der BRAM für die hohe Genauigkeit fehlt und ein DDR zu langsam ist, für die vielen Kanäle. Nett wäre z.B. ein Algorithmus, der pro Genauigkeitsstufe nur halb soviele Takte benötigt. Wenn nicht muss ich FPGA-Takt und Gehäuse ändern.
Ein Nachsatz noch: Ich meine mich erinnern zu können, dass es für Anwendungen aus früheren Zeiten, wo sie RAM sparen mussten, so einen Algo gegeben hat, der eine Kombi aus Auslesen und Iteration darstellte, also stückweise Interpolation wodurch erst die hohen und dann die niederen Bits berechnet wurden. Ich finde dazu aber nichts. Wenn ich einen Ansatz hätte, könnte ich den aufbauen und durchmessen, ob es mit der Genauigkeit und dem Tempo passt. Das habe ich z.B. für den CORDIC gemacht und bin so auf die 24 Stufen / Bits gekommen, die ich braucht, damit es wenig genug klirrt, denn die Frequenz moduliert wird.
Evt. hilft Dir https://community.element14.com/technologies/fpga-group/b/blog/posts/fpga-waves-8-fast-cordic-sine-and-cosine weiter? Es behauptet 'one sample per clock' (aber ich habe jetzt nicht weiter reingelesen wie gut das klappt).
Angehängte Dateien:
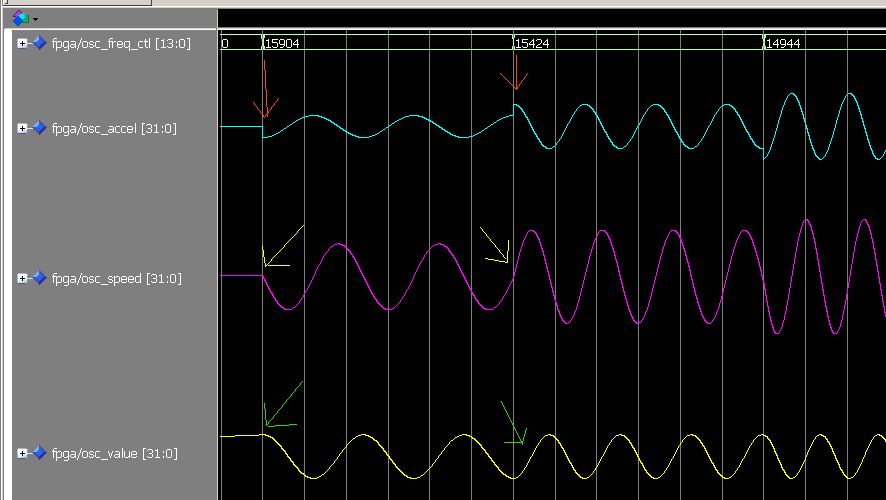
Hendrik L. schrieb: > Evt. hilft Dir Da wäre ich skeptisch :-) Die Version ist eine ausgerollte Version, die ebenfalls mit einer Stufe je Winkelsegment arbeitet. Allerdings eine mit 6 Bit. Das scheint für die Anwendung des Erstellers offenbar zu reichen. Hendrik L. schrieb: > Es behauptet 'one sample per clock' Beim Schnellen ÜBerfliegen scheinen die Module die dort ADD-MUL heißen einfach hintereinander gehängt. Wenn der FPGA schnell genug ist, geht das mit einem sample per Clock bei den angegebenen 50MHz. Das hilft aber nicht weiter. Man könnte es auch registrieren und bekäme auch jeweils ein Sample, halt nur mit Latenz, dafür aber auch gerne mit 200 MHz, also effektiv rascher. Dem Ersteller ging es da wohl um klein und kompakt. Der falsche Y-Offset, den man in der gelben Kurve im "Oszillogramm" sieht, scheint auch nicht zu stören. Das ist ein ganz offensichtlicher Fehler beim Interpretieren des Phasenvektors beim Vorzeichenbilden und deutet auf ein Misverständnis beim Zeitschema: Da wird wahrscheinlich der Y-Wert aus einer falschen Zeit / ein Takt zu spät geschnappt und anhand der aktuellen Phase geflippt. Wie auch immer ... Den kompaktesten und genauesten Sinus bekommt man im FPGA mit einem virtuellen Oszillator nach DGL 2.Ordnung. Das geht in etwa bis zur Frequenz Clock / N*N*N bitgenau, wenn man alles gut genug aufgelöst rechnet und gut rundet. Bei 200MHz sind 15kHz bei 24 Bit und dann 48 Bit breiten Vektoren. Das geht voll als pipeline in etwa 12-15 Takten, wegen 3 verketteten ADDs und MULs auf breiten Vektoren. Mit weniger Genauigkeit geht es auch mit 6 Takten, was dann die minimale Iterationslänge festlegt -> 6 Kanäle / Latenz. Nimmt man jetzt eine Länge von hier 16, bekommt man 16 Kanäle mit denen man arbeiten kann. Bei einem 6 Phasensystem wären eventuell 18 sinnvoll. Der Oszillator reagiert sofort auf Parameteränderungen, allerdings eben wie eine realer, d.h. mit Schwingungen und einer Art "Hineingleiten" in den neuen Zustand (Amplitude / Frequenz). Will man das nicht, braucht es eine DDS mit FIR-Filterung. Auch einen Cordic könnte man filtern.
:
Bearbeitet durch User
Wieviel Stützstellen werden denn benötigt? Ich bezweifle, das da wirklich zu wenig RAM ist. und aus den 40 MHz könnte man im FÜGA auch für einen bgrenzten Bereich Vielfache erzeugen und so die absolute Durchlaufzeit erhö hen. Und ein pißchen Capazität in der schaltung rundet auch die Stufen ab... also da sollte man vielleicht mal an ein FPGA-Evalboard eine Scope, Speckie anschliessen und schauen was rauskommt.
Wenn du genug Addierer/Multiplizierer hast, dann kannst Du die Cordic doch einfach als Pipeline umsetzen.
> Wenn du genug Addierer/Multiplizierer hast, dann kannst Du die Cordic > doch einfach als Pipeline umsetzen. Um welchen FPGA-Typ geht es hier eigentlich, Spartan XL aus der Mottenkiste?.
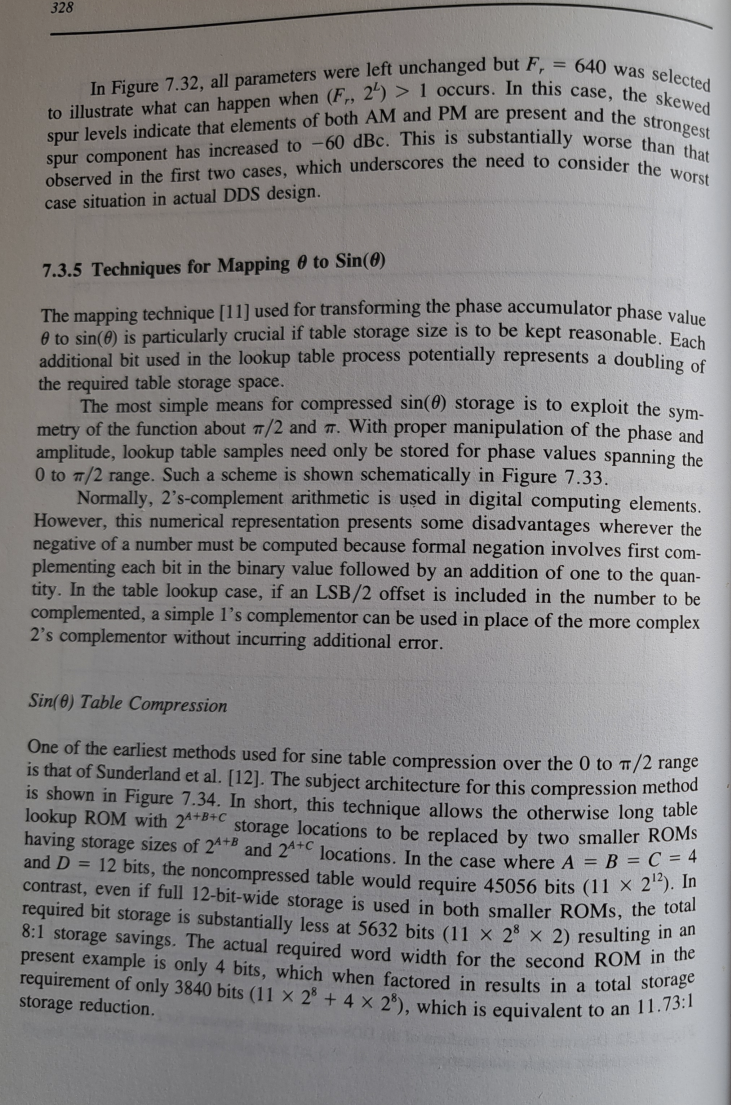
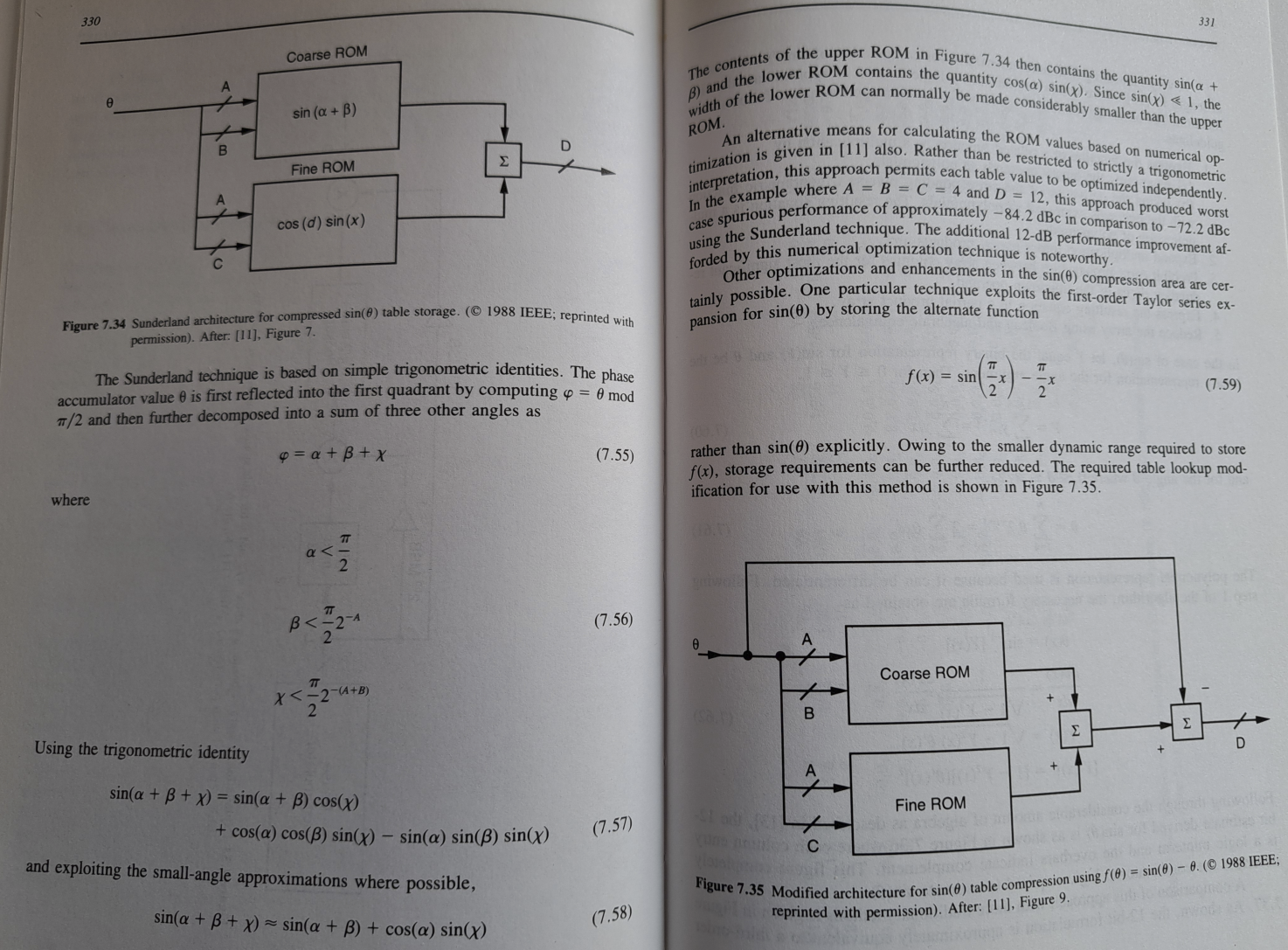
Bradward B. schrieb: >> Wenn du genug Addierer/Multiplizierer hast, dann kannst Du die Cordic >> doch einfach als Pipeline umsetzen. > > Um welchen FPGA-Typ geht es hier eigentlich, Spartan XL aus der > Mottenkiste?. Ich habe einen DDS veröffentlicht auf opencores.org. Der geht natürlich auch mit table lookup. project = sincos in der Abteilung arith. Die opencores web site ist so langsam am Vergammeln, notfalls kann ich ein zip schicken. Der DDS liefert sin und cos gleichzeitig ohne weiteren Mehraufwand. Auf einem Spartan-6-eval board aus der Mottenkiste läuft er mit 200 MHz ohne Optimierungsgetue. Pipelinestufen sind kombinatorisch bis ??? durch ein generic einstellbar. Symmetrie wird ausgenutzt soweit es geht. Reines VHDL ohne Hersteller-Macros. Die Sunderland-Technik zum Zerlegen der Sinus-Tabelle in 2 viel kleinere habe ich nicht gebraucht, mir kam es auf kleine Latenz an, für einen Demodulator auf 70 MHz. Viel delay macht die Stabilität der digitalen PLL schwer beherrschbar, deshalb auch kein Cordic. Mit der Sunderland-Technik kann man die Größe der Tabelle auf 1/10 .. 1/50 der Speicherbits insgesamt runterbringen, je nach Rom-Abmessungen. Beschrieben wird das in James A. Crawford: Frequency Synthesizer Design Handbook Er gibt einen pointer: Sunderland, D.A. et al. CMOS/SOS Frequency synthesizer LSI circuit for spread spectrum communications IEEE J. Solid State Circ. Vol. SC-19 August 84 pp 495-505 Wenn Du's irgendwo erlegst, würde mich eine Kopie freuen. Man könnte auch eine Tabelle für mehrere Kanäle multiplexen wenn der Takt schnell genug ist. Gerhard H
:
Bearbeitet durch User
Angehängte Dateien:
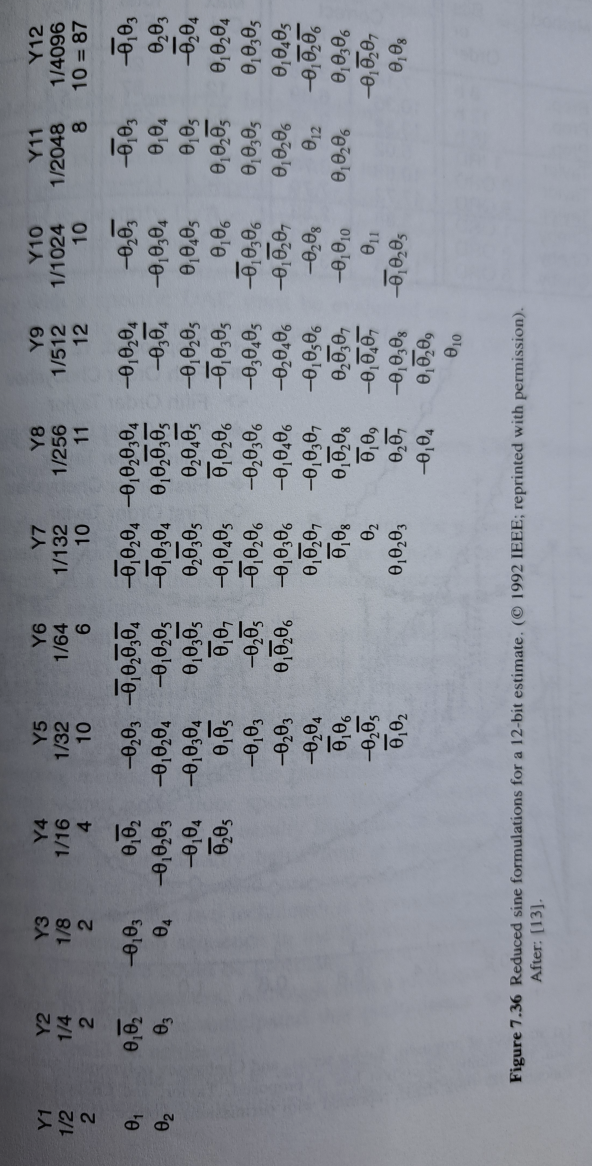
Ich glaube, das geht noch als fair use durch.
Leider war die Quelle nicht besser ;-) Hier als kleines PDF (scantailor + naps2).
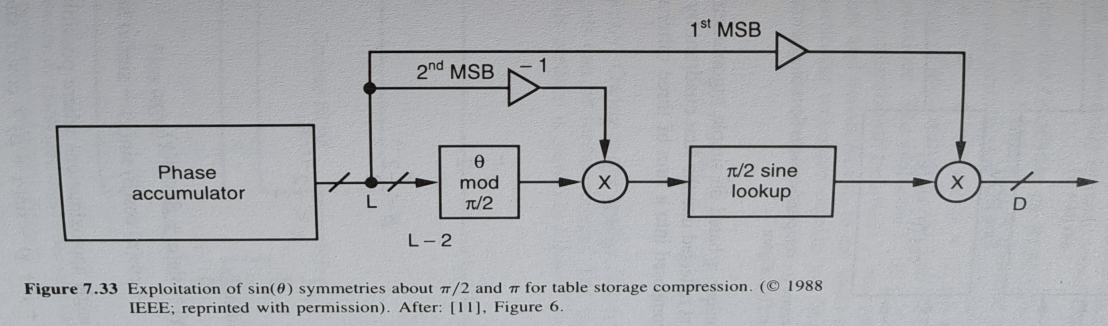
Gerhard H. schrieb: > Die Sunderland-Technik zum Zerlegen der Sinus-Tabelle ... stammt ja noch aus einer Zeit, wo RAM sehr knapp und teuer war - bzw. es FPGAs noch gar nicht gab. Es ist am Ende auch eine Interpolation, die wie CORDIC und alle diese DDS-Verfahren immer einen Restfehler produziert. Den muss man sich ansehen. Sunderland ist da nicht so glücklich, weil er "unten" viele kleine Miniaturbögen hat. Das auszugleichen kostet am Ende wieder mehr Rechenaufwand. Wenn man ausreichend RAM hat, ist das direkte Ablesen immer das Beste, wenn es DDS sein soll - zumal man mit heutigen BRAMs eben zwei Adressen / Werte gleichzeitig bekommt. Die anschließende Filterung ist dann das Entscheidende, um Oberwellen zu beseitigen, die unerwünscht sind. Dort muss man den Kompromiss zwischen "glatt" und "schnell" hintrimmen. Da hängt man an die beiden Ausgänge der DDS einfach ein paar Register dahinter und setzt einen FIR drüber. Eine gewisse Filterung braucht es ja eigentlich immer, weil alle diese Funktionen einen Sprung erzeugen, wenn man die Frequenz oder die Phase umstellt. Das einfachste und "weicheste" ist da dann immer noch der Sinus-Resonator, da dieser selber ein Filter ist. Wenn man den breit und damit genau genug aufbaut, hat man direkt auch Sinus und Cosinus über die beiden höchsten Integrationssstufen.
J. S. schrieb: > Eine gewisse Filterung braucht es ja eigentlich immer, weil alle diese > Funktionen einen Sprung erzeugen, wenn man die Frequenz oder die Phase > umstellt. Kann man dafür nicht das Anti-aliasing Filter vom DAC etwas anders auslegen? Mit einer niedrigeren Grenzfrequenz dürfte das doch die selbe Funktion erfüllen...
Rick D. schrieb: > Kann man dafür nicht das Anti-aliasing Filter vom DAC etwas anders > auslegen? Wenn das konkret möglich ist, ja - aber: a) werden die analogen Filter bei entsprechender Güte NOCH langsamer und träger, als die digitalen. b) sind gute analoge Filter in der Regel teurer, als intern filtern und richtig sauber ausgeben c) streuen analoge Filter mehr in der Produktion d) hat man keine Kontrolle über das, was der DAC mit den kleinen Sprüngen und Knicken so macht in Sachen dithering und overshot etc e) gibt es ein Problem, weil man die Frequenz nicht kennt. Zu a)-c) ersetzen wir ja eher analoge Filterfunktionen nach dem DAC durch SW, um diese schneller und stabiler zu machen ... ... bezüglich d) werden Wandler vorkompensiert um deren Verhalten anzupassen, d.h. die Bandbreite und Schwinger zu optimieren. Das gleiche gilt für die nachfolgenden Verstärker der Signale. Was e) angeht: Gerade Motorsteuerungen fahren ja völlig unterschiedliche Frequenzen. Das ist wie Audio. Bandlimitieren kann man das nur ganz "oben" am Ende. Will man eine Frequenz weiter unten "fahren" dann muss die auch Sinus sein, - ist es aber nicht, weil der Filter zu hoch ansetzt. Man kann das nicht dem RC-System im DAC oder einem nachgeschalten Tiefpass im System überlassen und auch keinesfalls der Motor-Induktivitär oder der Achsenträgheiten. Es braucht also eine adaptive Glättung für die jeweilige Fahrfrequenz -> parametrierbares IIR-/FIR-Filter. Was man generell tun kann, ist, bei sehr langsamen Sinüssen zu dithern und noiseshaping zu betreiben, sodaß dass Störspektrum der Knicke und Fehlinterpolationen und Stufen nach oben wandert. Dann ist es einfacher zu filtern.
Man merkt, Du hast Dich schon mal intensiver damit beschäftigt :) Danke für die ausführliche Antwort!
Rolf schrieb: > Wenn nicht muss ich FPGA-Takt und Gehäuse ändern. Oder einen DSP einfliegen, und den wirklich effektiven CORDIC-Algo im FPGA "Legacy" nennen. (https://www.reddit.com/r/FPGA/comments/kdnkzf/how_prevalent_is_cordic_these_days/)
Jetzt mal ehrlich: Wie relevant ist eine Frage a) eines so unerfahrenen Nutzers b) in einem solchen Forum, der c) irgendwo lernt, wo die Professoren angeblich noch nie was vom CORDIC gehört haben wollen? Ist das die Pampa-Universität? Die Aussage des Antwortenden ist auch am Thema vorbei, da der schon mal nicht kapiert, wie hoch die Bandbreite in FPGAs im Vergleich zu den DSPs ist und nur einen einmaligen Rechenvorgang vergleicht. Man kann und muss man keinesfalls immer und überall einen DSP ankleben, um dessen Recheneffizienz zu nutzen. Gleichwohl wird das durchaus gemacht und Teile von Rechnungen aus FPGAs herausgeholt. In den mir bekannten realen Fällen in der Industrie aber war das meistens aus Stromspargründen, weil das Gerät mit Batterien betrieben wird und weit fliegen soll bzw. es in der Wüste steht und wenig Raum für interne Hitzeentwicklung gab. Der teilweise Umstieg auf DSP war notgedrungen, der Situation geschuldet, teuer und umständlicher und wäre andernfalls unterblieben. In den allermeisten Systemen, die wegen Berechnubgsbandbreiten einen FPGA erfordern, macht man auch den CORDIC und Sinus im FPGA, auch wenn die für sich als Modul betrachtet, umständlicher sind. Heute lernen aber die meisten Studenten an SOPCs die ARM-Cores drin haben. Da ist der erste Griff für alles Mathematische natürlich der DSP und C.
Angehängte Dateien:
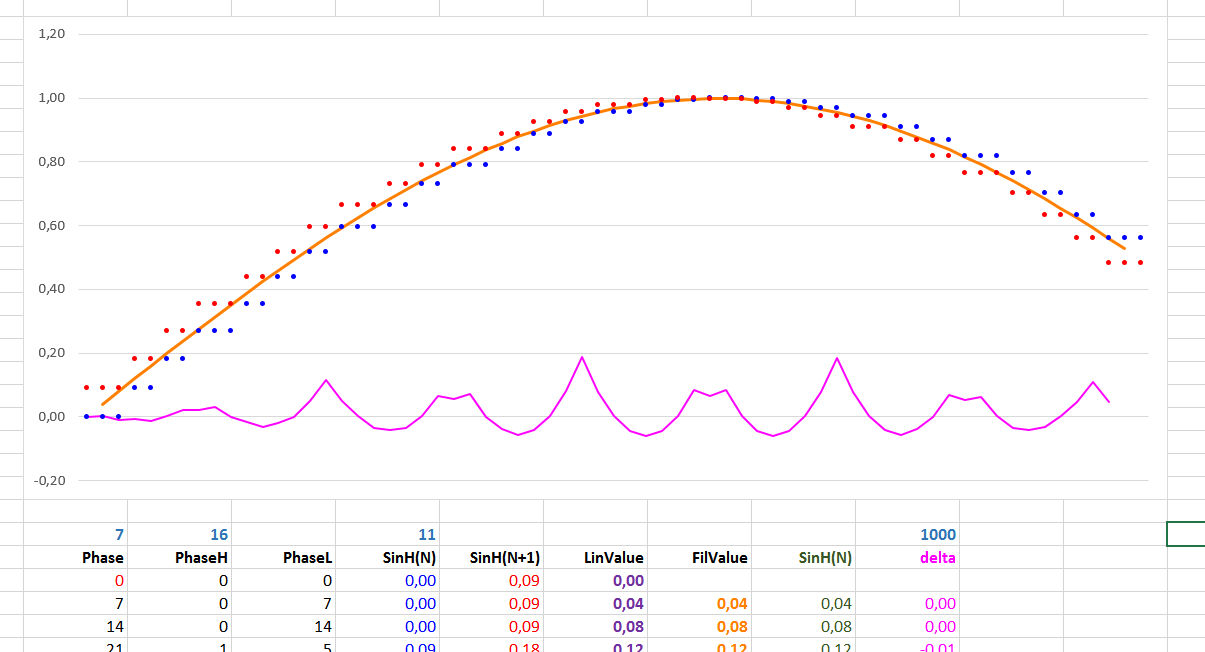
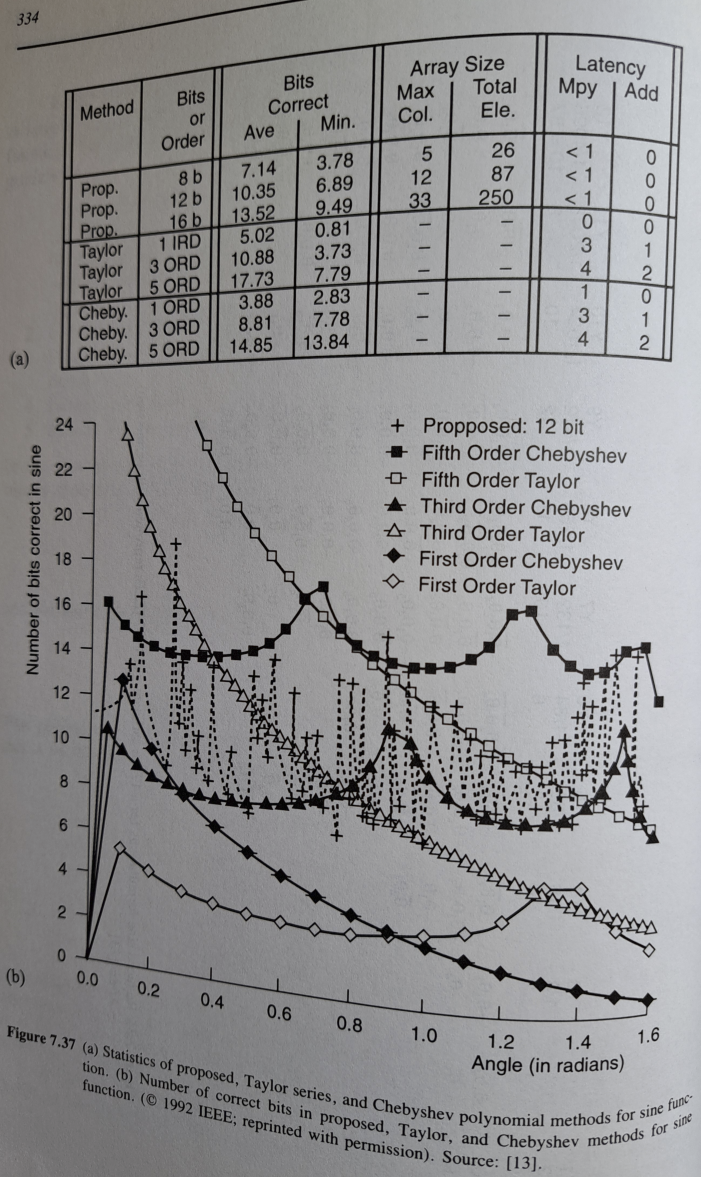
Wenn man die Diskussion weiter verfolgt, findet man überwiegend Ideen, die eine Verallgemeinerung der Erfahrungen aus eigenen Projekten beinhaltet, ohne aber wirklich Übersicht über allemöglichen Anwendungen zu haben. Manchmal scheinen mir auch die Optionen der Haardware oder von FPGAs nicht verstanden zu sein. Da schreibt z.B. einer, daß er den CORDIC (und dessen Multiplikationen) nicht gut findet und es nun selber mit den "DSPs" in FPGAs gemacht haben will. :x Auch sind die Anwendungen, die da bearbeitet werden, offenbar nicht sonderlich anfordernd an die Genauigkeiten gewesen, siehe das Beispiel mit den 18 Bit und der quadratischen Interpolation der Sinuswerte, die dann aber offenbar nur 2 Punkte involviert, was keinen Sinn macht. Mein Tipp: Bevor man sich da zuviel abmüht mit Rekursionen, Iterationen und Zugriffen auf Speicherzellen, die ja in DSPs auch stattfinden müssen und das RAM fordern, ist es oft schlauer, statt eines zusätzlichen DSPs mit RAM, einfach über den Bus, den es zum DSP ja bräuchte, zu einem sehr geringen Preis direkt das RAM an den FPGA zu hängen. Die haben je genug Fläche und Bandbreite, um ausreichend hochgenaue Werte zu liefern. Dann gibt es mit 32Bit über die Ausgabe eines Wertes und der Steigung direkt die Option einer Interpolation von 16 auf ca. 22-24 Bit und mit einer orthogonalen Rechnung auch den Cosinus in ähnlicher Qualität. Interpoliert werden muss sowieso. Auch wenn nur linear interpoliert und gefiltert wird, kriegt man aus einer 16 Bit-Tabelle einen maximalen Fehler von 0,0002. Wer keine DDR-Controller oder deren Latenzen will, der könnte auch ein SRAM dranhängen. Damit packte man um 2005 schon SIN/COS IQ mit 80Mhz.
J. S. schrieb: > Ist das die Pampa-Universität? Wenn man den Punkt jetzt mal "aufspießt": notwendigerweise. Zuerst mal fand ich die Sache mit den Veröffentlichungen interessant. Das war doch bei Haskell ganz ähnlich. Hochzeiten so von 2008 bis 2012 - danach kaum noch Einträge in der Bibliothek. Später gab es dann noch Lambda-Kalkül-Importe bei Java und bei C++ und das wars dann. Traditionell haben C-Basierte Programmier-Sprachen halt auch ihre Vorteile (und Bibs). Und DSPS? Die sind schon lange mit (vielbändiger) Telefonbuchdicker Literatur unterfüttert, die teilweise auch noch wertvolles naheliegendes KnowHow aus der Analogwelt importiert. So gesehen ist jedes FPGA-Projekt notwendigerweise ein Privatprojekt mit einer, passend aus gedrückt: Pampa-Universität ;) (https://www.youtube.com/watch?v=TBCf1p7BSek)
Angehängte Dateien:
-

taschenrechner1968.jpg
39 KB

{kind=link}
{kind=link}
Das Video von Cesare habe ich mal überflogen, kriege aber deinen Punkt nicht so recht: Geht es jetzt um ein Beispiel des CORDIC? oder um SOUL? - Mein Einwurf mit der "Pampa" war so gemeint, daß es eigentlich nicht möglich sein sollte, daß "ein Prof noch nie was davon gehört haben soll". Wie auch immer: Was er hier beschreibt ist ja nichts anderes als (s)eine Form der Synthese der Sinuswellen, um einen additiven Synthesizer zu bauen mit Hinweis auf die Vorteile u.a. der Bandlimitierung. Das ist wohl irgendwie effektiver (als was?), wobei ich noch nicht so recht sehe, was er da ganz genau anders/besonderes macht, weil ich SOUL nicht kenne. Was FPGA angeht, gibt es für die mehrdimensionale Wellensynthese auch die Option, einen sehr genauen Sinus zu bauen und die Oberwellen per Multiplikation auszurechnen, wie ich das hier ja schon mal gezeigt hatte: Vervielfachung der Frequenz mittels Multiplikation Im rechten Bild sieht man die Oberwellen in Chipscope im damaligen Spartan 3 FPGA. Auch dann habe ich ja die Bandkontrolle in den Händen und in FPGAs geht ja die Multiplikation sehr einfach. Nur den initialen Sinus muss man lösen. Da hat ein DSP sicher Vorteile, unbestritten. Hauptvorteil ist die Auflösung der Berechnungen, pro Schritt. Da muss man eben im FPGA bei der Grundwelle einmal richtig investieren. Für jede Oberwelle, die man generieren will, muss man mindestens 1 Stelle an Auflösung vorher reservieren. Der 24 Bit Sinus, um ein perfektes Rechteck bis 20kHz zu bauen bräuchte demnach rund 36 Bit Auflösung. Ich sehe diesbezüglich das Problem bei CORDIC aber nach wie vor in der Approximation, die einen Prinzipfehler enthält, den man nur unterdrücken kann, wenn man über die geforderte Genauigkeit des Ziels deutlich hinaus geht und das dadurch entstehende Fehlerrauschen filtert. Das wäre ganz besonders beim Audio wichtig. Ein so genauer CORDIC ist aber sehr rechenaufwändig, wenn er das für alle Wellen machen möchte. Was ich mir aus dem Video mitnehmen, war der Taschenrechner:
J. S. schrieb: > Was ich mir aus dem Video mitnehmen Ja gell? Ein wenig verfänglich diesbezüglich fand ich das Video auch. Ich konnte den Erklärungen da jedenfalls besser folgen als dem hier: https://www.mikrocontroller.net/articles/Audio-DSP_mit_Spartan_3-FPGA Wichtig finde ich auch, dass es hilft, so ein paar grundsätzliche Hintergründe zu erarbeiten. Das muss man doch vor allem selber tun, und sowas kann kaum über einen Forenbeitrag übertragen werden. Im Video zwar einiges Wichtige nur schnell schnell im Schweinsritt verklickert (Shift,Add, Vector(+loop)..) - aber so als Schnittstelle zu den 50ern fand ich den Vortrag schon ok. Man darf ja auch nicht vergessen, dass die Leute damals noch richtig gut mit Logarithmen rechnen konnten, und Bleistift-, Zirkel- und Karopapiermathe auch noch aus dem FF konnten. Darüberhinaus konnten die damals auch schon Aussagen zur Parallelrechnerei machen: Lisp zwar eine gute Idee - aber zum Rechnen selber hatte man doch lieber Fortran eingesetzt ;) Hinsichtlich der Ausgangsfrage wäre aus meiner Sicht zu empfehlen, den Aufbau für das "Gerät" zuerst mit ASIC, CPU oder DSP zu machen. Bei ARM bietet sich ja beides an (also CPU + DSP), wäre sogar noch besser.
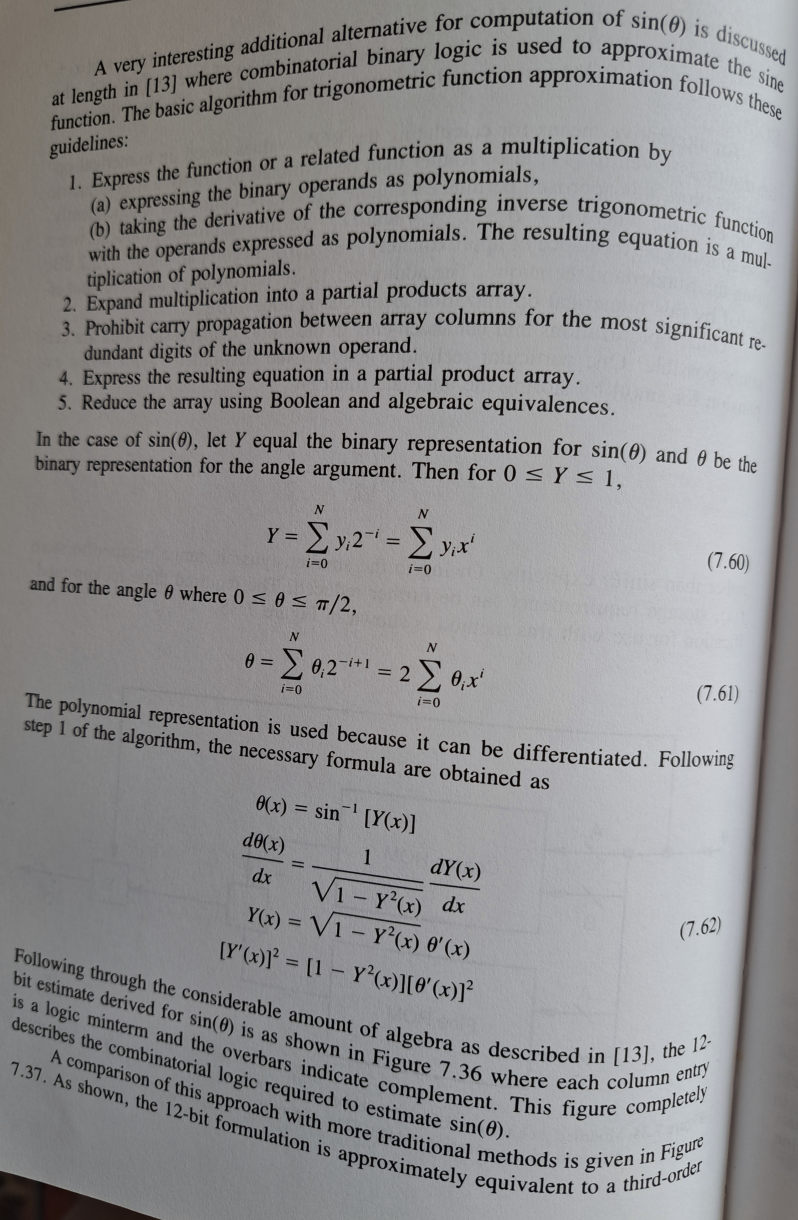
J. S. schrieb: > Dem Ersteller ging es da wohl um klein und kompakt. Der falsche > Y-Offset, den man in der gelben Kurve im "Oszillogramm" sieht, scheint > auch nicht zu stören. Das ist ein ganz offensichtlicher Fehler beim > Interpretieren des Phasenvektors An dem Programm-Code stimmt noch mehr nicht, wie mir scheint. Und wie richtig gesehen ist die Auflösung viel zu gering. Andreas M. schrieb: > Wenn du genug Addierer/Multiplizierer hast, dann kannst Du die Cordic > doch einfach als Pipeline umsetzen. Ja natürlich. Wenn ich den entsprechend parametrisiere, ist der voll pipeline-fähig. Da behebt aber das Problem nicht, weil er eben bei entsprechender Genauigkeit sehr viele (zuviele) Takte benötigt. Gerhard H. schrieb: > Ich habe einen DDS veröffentlicht auf opencores.org. Welche Vorteile hätte dieser gegenüber dem Core aus dem Coregenerator? Ich habe den Programm-Code angesehen, fürchte aber dass auch der nicht schnell genug ist. Die Methode ist ja dieselbe. Oder? Gerhard H. schrieb: > Mit der Sunderland-Technik kann man die Größe der Tabelle > auf 1/10 .. 1/50 der Speicherbits insgesamt runterbringen, > je nach Rom-Abmessungen. Der geht nicht, wegen der umständlichen Berechnung. Es wird wohl auf eine Tabelle hinauslaufen in einem größeren FPGA.
Nur der Vollständigkeit wegen: Es ist nun ein FPGA geworden, an dem ein SRAM hängt, nur für diesen Zweck. Die Sinusse werden in einer Nutzungspause einzeln optimiert und an die Betriebsbedingungen angepasst - d.h. es gibt zwischeninterplierte Stützstellen einer veränderlichen Zahl - passend zu den Abtastfrequenzen.
Rolf schrieb: > Gerhard H. schrieb: >> Ich habe einen DDS veröffentlicht auf opencores.org. > Welche Vorteile hätte dieser gegenüber dem Core aus dem Coregenerator? > Ich habe den Programm-Code angesehen, fürchte aber dass auch der nicht > schnell genug ist. Die Methode ist ja dieselbe. Oder? Er ist eben reines, portables VHDL. Man ist nicht auf einen Hersteller angewiesen. Auf einem alterthümlichen Spartan-6 eval board läuft der DDS mit 206 MHz, einfach so, ohne rumoptimieren. Zur Compilierzeit kann man den ganzen Sprachumfang von VHDL nutzen. Was in Pascal oder C geht, das geht in VHDL allemal; nicht nur das bisschen das man synthetisieren kann. Es riecht halt etwas merkwürdig. -------------------------------------------------------------- Hier passiert das Wesentliche (gekürzt): -- the sine lookup table is unsigned because we store one quarter wave only. type sintab is array (0 to (2**(theta'length-2)) -1) of unsigned(sine'length-2 downto 0); function init_sin(verbose: boolean; rom_words: integer; bits_per_uword: integer) return sintab is variable s: sintab; ....... for i in 0 to rom_words-1 loop y := sine_at_middle_of_bin(i, rom_words); s(i) := to_unsigned(integer( round(y * scalefactor )), bits_per_uword); if verbose then report_blabla end if; end loop; return s; end function init_sin; -- The 'constant' is important here. It tells the synthesizer that -- all the computations can be done at compile time. constant sinrom: sintab := init_sin(verbose, 2 ** (theta'length-2), sine'length-1); ----------------------------------------------------------------------- > Gerhard H. schrieb: >> Mit der Sunderland-Technik kann man die Größe der Tabelle >> auf 1/10 .. 1/50 der Speicherbits insgesamt runterbringen, >> je nach Rom-Abmessungen. > Der geht nicht, wegen der umständlichen Berechnung. > Es wird wohl auf eine Tabelle hinauslaufen in einem größeren FPGA. Sunderland würde genauso gehen. Für die Tabellen wird nur ein Array von unsigneds angelegt und die Initialisierung zur Compilationszeit berechnet. Im fertigen Chip bleibt davon nur das Auslesen des ROMs übrig, keine sonstige Logik. Das Spartan hatte mit seinen Blockrams keine Größenprobleme. Sunderland mach' ich mal bei Gelegenheit. Gruß, Gerhard
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.