Ich nutze einen handbetriebenen Drehgeber von ALPS an einem Atmel328p,
kann aber für das Lesen keinen Timer einsetzen. Also musste ein anderer
Weg für das entprellte Erkennen beider Drehrichtungen her.
Ich kam nach einigen Versuchen und dem Lesen des Datenblattes vom
Drehgebers (macht das Leben so viel leichter) zu folgendem Verfahren.
Schauen wir uns exemplarisch die Schalterstellung als Bitfolge an (A
schaltet hier vor B mit Prellen beider Schalter, Ausgangslage ist 00):
1
BA BA BA BA BA BA BA BA BA BA BA BA BA BA BA BA BA BA
A schaltet ab Schritt 2 und ist ab Schritt 6 stabil. Laut Datenblatt
meines Drehgebers fängt B erst an zu Schalten, wenn A umgeschaltet hat
(wichtig, geprüft per Oszilloskop). Im Beispiel schaltet B ab Schritt 10
und ist ab Schritt 16 stabil.
Ansatz: es reicht zu erkennen, dass A geschaltet hat und stabil ist, und
darauf zu warten, das B anfängt zu prellen. Und natürlich anders herum
bei geänderter Drehrichtung. Das reicht als Indikator.
Vorgehen: die Schalterstellung als 2-Bit-Folge bei Änderungen in eine
8-Bit-Queue schieben und die Queue für die Drehrichtungserkennung
nutzen.
Wenn ich das obige Beispiel nehme, enthält die Queue als Ergebnis die
Bitfolge xx000111 (Shift von Rechts, die beiden hohen Bits sind nicht
von Belang). Wenn wir mit 11 starten und in die gleiche Richtung weiter
drehen, enthält die Queue xx111000. Dieses Pattern zeigt mir eine
Drehrichtung an. Wenn in die andere Richtung gedreht wird, sehen die
Pattern so aus: xx001011 bzw. xx110100. Also reicht es, die Queue
fortlaufend gegen die Änderungs-Pattern zu vergleichen und den Match als
Drehrichtungserkennung zu werten.
Vereinfacht wird das Ganze, da die Pattern einer Drehrichtung genau
gegenteilig sind. man schaut einfach auf Bit 6 und invertiert das Muster
wenn das Bit auf 1 steht. Dann bedeutet Pattern xx000111 eine
Drehrichtung und xx001011 die andere Drehrichtung.
Das Ganze läuft ohne Timer bei mir in meinem ziemlich proppevollen Code
problemfrei. Die Variable ticks (siehe Code Beispiel) beinhaltet die
Anzahl der Drehschritte und muss möglichst schnell ausgewertet werden.
In meinem Projekt geschieht das ungefähr alle 80-120ms, das ist für die
händische Nutzung bei mir völlig ausreichend.
Beispiel-Code:
Wolfgang schrieb:> Ich nutze einen handbetriebenen Drehgeber von ALPS an einem Atmel328p,> kann aber für das Lesen keinen Timer einsetzen.
Viele Probleme lassen sich lösen, wenn man einen Schritt zurückgeht und
die vermeintlich unabänderlichen Rahmenbedingungen ändert. Wieso sollte
Dein Atmega keinen Timer haben? Wieso sollte nicht in einer der von Dir
vermutlich für andere Dinge genutzten Timerinterruptroutinen auch
nebenbei das Pollen der zwei/drei I/O-Pins des Drehgebers eingefügt
werden können?
Wolfgang schrieb:> Das Ganze läuft ohne Timer
Natürlich ist da implizit ein "Timer" mit drin: die Durchlaufzeit der
mainloop. Und auf diese Art hast du dann auch Abhängigkeiten von der
Plattform, auf der die SW läuft.
Das, was du da im Grunde machst, ist eine Flankenerkennung über ein
Schieberegister. Oder eher über zwei ineinander verwobene
Schieberegister.
-
https://www.lothar-miller.de/s9y/archives/18-Flinke-Flankenerkennung.html> uint8_t encoder_status; // actual encoder status
Ein Tipp: "actual" stimmt hier eigentlich nicht, denn da drin steht
nicht der "tatsächliche" Enoderzustand, sondern der "kürzlich" bzw.
"zuletzt" eingelesene Wert. Die Worte "most recent" oder "latest" wären
richtig, denn der "tatsächliche" Pegel an den Pins und damit der
"tatsächliche" Encoderzustand kann sich schon wieder geändert haben.
Harald K. schrieb:> Wieso sollte nicht in einer der von Dir> vermutlich für andere Dinge genutzten Timerinterruptroutinen auch> nebenbei das Pollen der zwei/drei I/O-Pins des Drehgebers eingefügt> werden können?
So isses!
Wenn nicht benötigt oder störend, kann man auch UART oder SPI für
periodische Interrupts verwenden. Alles andere ist unötiges Gewürge.
Mi N. schrieb:> Wenn nicht benötigt oder störend, kann man auch UART oder SPI für> periodische Interrupts verwenden.
Du meinst eine ungenutzte UART, in ihrer Tx-ISR immer wieder zum Senden
angeregt, um mit Baudrate/10 einen regelmäßigen Interrupt zur Verfügung
zu stellen?
Kann man natürlich auch machen, wenn es tatsächlich eine ungenutzte Uart
geben sollte. Ähnlich ließe sich auch ein ungenutzter AD-Wandler nutzen
...
Kreativer Ressourcenmissbrauch.
Wolfgang schrieb:> Also musste ein anderer Weg für das entprellte Erkennen beider> Drehrichtungen her.
Ein Drehgeber mit AB-Ausgang liefert einen 2-Bit Gray-Code. Der braucht
prinzipbedingt keine Auswertung mit Entprellung, um sich nicht zu
verzählen. Bei richtiger Auswertung springt der Ausgabewert durch das
Prellen lediglich zwischen den beiden benachbarten Werten, da der andere
Kanal einen stabilen Wert liefert, während der eine um Umspringen ist.
Wolfgang schrieb:> Beispiel-Code:
Extrem umständlich.
Deine while-Schleife fragt den Encoder zyklisch ab, das ist dein
Timertick, nur halt nicht mikrosekundenstabil.
Der übliche Encoderauswertecode hat kein Problem damit wenn die Abfragen
nicht zeitstabil sind, denn er kommt mit prellenden Kontakten klar.
Also kann man den code vereinfachen
https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.29
Rainer W. schrieb:> Ein Drehgeber mit AB-Ausgang liefert einen 2-Bit Gray-Code. Der braucht> prinzipbedingt keine Auswertung mit Entprellung, um sich nicht zu> verzählen. Bei richtiger Auswertung springt der Ausgabewert durch das> Prellen lediglich zwischen den beiden benachbarten Werten, da der andere> Kanal einen stabilen Wert liefert, während der eine um Umspringen ist.
So ist es.
@Wolfgang: Wenn du jeden Viertel-Schritt zählen möchtest UND alle Fehler
erkenne willst, dann fällt das Prellen automatisch mit weg.
Übersetz die Pattern in Schritte s (00:0, 10:1, 01:2, 11:3), dann ist
die Auswertung Trivial. mit ds = s(neu)-s(alt) (begrenzt auf 2 Bit
unsigned int) ergibt sich
* ds = 0: nix passiert
* ds = 1: Viertelschritt++;
* ds = 2: Fehler
* ds = 3 (=-1): Viertelschritt--;
Für den Anfang ist es sinnvoll, die 4*4 Kombinationen einzeln
durchzugehen. Danach passt das in ein Array und 2 Zeilen.
Mi N. schrieb:> Es gingen auch noch TWI oder WDT,
I2C ohne irgendein Gegenstück dürfte recht lange Timeouts erzeugen; WDT
ist, sofern man ihn nicht dazu bekommt, nur 'nen normalen Interrupt
auszulösen, nicht so die beste Idee ...
Einfach A und B jeweils auf einen Port legen und den Interupt bei
steigender UND fallender Flanke auswerten. Entprellen ist unnötig (wie
schon geschrieben wurde). Wenn Du willst, kannst Du aber die Eingänge
noch bissl filtern (Tiefpass 1 kHz oder so).
Ob addiert wird oder subtrahiert hängt vom anderen Pegel und der Flanke
ab. Einfach mal aufzeichnen, dann wird alles klar.
Z.B.:
A fallende Flanke, B low -> subtrahieren.
A steigende Flanke, B low -> addieren.
Polling war schon immer nicht besonders effektiv. Es blockiert vor allem
andere Tasks.
Nick schrieb:> Polling war schon immer nicht besonders effektiv. Es blockiert vor allem> andere Tasks.
In embedded SW ist es für viele Aufgaben genau andersrum: Polling
verbraucht konstantere Zeit und hat nur geringen WorstCase.
Das ist der alte Disput Eventbasiert vs. SPS-Loop.
alles was prellen kann, ist eventbasiert eine Zeitbombe. Egal ob Tasten
oder Drehgeber bis etwa 6000 Schritte pro Minute, im ms-Systemtakt 10
Zyklen sind gut investiert.
Wolfgang schrieb:
Mich wundert das dazu noch niemand etwas gesagt hat.
> Das Ganze läuft ohne Timer bei mir in meinem ziemlich proppevollen Code> problemfrei.
Proppenvoller Code hat nichts zu sagen. Es wird nie jede Programmzeile
in jedem Durchlauf abgearbeitet. Ist einfach zu unspezifisch.
> Die Variable ticks (siehe Code Beispiel) beinhaltet die> Anzahl der Drehschritte und muss möglichst schnell ausgewertet werden.
Das beißt sich mit
> In meinem Projekt geschieht das ungefähr alle 80-120ms, das ist für die> händische Nutzung bei mir völlig ausreichend.
80-120ms Durchlaufzeit. Für einen Handencoder sind max. 2ms sinnvoll.
Wenn man wirklich langsam dreht meinetwegen auch 4ms. Aber niemals sind
80-120ms ausreichend. Nie und nimmer. Der kann gar nicht so reagieren
wie man möchte. Ich würde mir erstmal die Frage stellen warum dauert ein
Durchlauf so lange?
Nick schrieb:> Polling war schon immer nicht besonders effektiv. Es blockiert vor allem> andere Tasks.
Kann man so nicht sagen. Polling blockiert jedenfalls nichts. Denn es
kann jederzeit von einem Interrupt etc. unterbrochen werden.
Wolfgang schrieb:> kann aber für das Lesen keinen Timer einsetzen.
wieso?
passende Routinen kann man kombinieren, Tasten und Encoder -prellen auch
mit berücksichtigen, ich hatte PeDas Entprellroutinen für Tasten und
Encoder sogar zusammen nutzen können, eigentlich kann man ALLES mit
einem timer erschlagen, man muß nur die Ticks richtig und kurz auswerten
und kann alles in der Main erledigen, mal ehrlich was ist so
zeitkritisch das es nicht wenige µs bis ms warten kann, LCD
aktualisierung, mehr als 10/s kann eh keiner lesen, ob eine Taste nach
10ms oder 20ms reagiert ist doch egal, so schnell drückt kein Mensch,
außer in Elektronik WM Profispieler und irgendwann ist der RAM und Flash
auch endlich um ein komplettes starkes Schach unterzubringen. Dem
PET2001 reichte sogar 7kB für respektable Leistungen auf Hobbyniveau.
Nick schrieb:> Einfach A und B jeweils auf einen Port legen und den Interupt bei> steigender UND fallender Flanke auswerten.
Es gibt immer Möglichkeiten, eine einfache und vorliegende Lösung
komplexer und schlechter zu machen.
Nick schrieb:> Entprellen ist unnötig
damit die Garbe an Mikro- bis Millisekundenimpulsen voll in den
Interrupteingang reinhaut und Interrupt nach Interrupt auslöst damit der
uC zu gar nichts anderem mehr kommt.
Mi N. schrieb:> In der Regel wird man für solche Vorschläge auf den Scheiterhaufen> gezerrt.
Sicher. Dummheit gehört bestraft.
Bruno V. schrieb:> In embedded SW ist es für viele Aufgaben genau andersrum: Polling> verbraucht konstantere Zeit und hat nur geringen WorstCase.
Stimmt. Polling verbraucht garantiert 100% Zeit. Selbst wenn sich nichts
ändert. Da ist nicht mal Zeit, die geänderten Werte anzuzeigen. Ausser
macht Spaghetti-Code draus.
Veit D. schrieb:> Polling blockiert jedenfalls nichts. Denn es> kann jederzeit von einem Interrupt etc. unterbrochen werden.
Ja, z.B. Interupts für den Drehgeber.
Michael B. schrieb:> damit die Garbe an Mikro- bis Millisekundenimpulsen voll in den> Interrupteingang reinhaut und Interrupt nach Interrupt auslöst damit der> uC zu gar nichts anderem mehr kommt.
Beim polling werden dafür beinahe ständig die gleichen Werte gelesen.
Das ist weitaus effektiver. In Deiner Welt.
Nochmal: Wer will kann einen Tiefpass davor setzen. Aber vorsichtshalber
mal das Eingangssignal mit dem Oszi anschauen.
Falls Du wichtigere Interupts hast, es gibt Prioritäten dafür.
Diskussion auf Arduino-Niveau.
Wolfgang schrieb:> In meinem Projekt geschieht das ungefähr alle 80-120ms, das ist für die> händische Nutzung bei mir völlig ausreichend.
Dann darfst du aber ganz bestimmt nicht beherzt am Encoder drehen. Bei
einem typischen Encoder mit 15 Impulsen pro Umdrehung auf jeder Spur
(z.B. Alps 401590), d.h. 60 verschiedenen Zuständen auf 360°, müsstest
du mehr als 60 mal pro Umdrehung abfragen. Die schnellste Drehung, die
du mit deiner Abtastung von im worst case 120 ms erfassen kannst, müsste
bei so einem Geber also über 7 (sieben) Sekunden dauern. Um damit
irgendetwas mit normaler Handhabung eines Drehknopfes sinnvolles
einstellen zu können und nicht das Abtasttheorem zu verletzen,
bräuchtest du einen Feintrieb zwischen Drehknopf und Drehgeber, was ja
wohl eher selten der Fall ist.
Wie kommst du darauf, dass so eine Abtastrate für händischen Betrieb
ausreichend ist?
Michael B. schrieb:> Nick schrieb:>> Entprellen ist unnötig>> damit die Garbe an Mikro- bis Millisekundenimpulsen voll in den> Interrupteingang reinhaut und Interrupt nach Interrupt auslöst damit der> uC zu gar nichts anderem mehr kommt.
Das wäre dann der erste mechanische Drehgeber, der Mikrosekundenimpulse
erzeugt. Hast du dir Pulse von so einem mechanischen Geber einmal mit
einem Oszi/LA angesehen?
Rainer W. schrieb:> Das wäre dann der erste mechanische Drehgeber, der Mikrosekundenimpulse> erzeugt.
Es geht um prellende Kontakte. Ist der Drehgeber frisch, wird er noch
nicht so sehr prellen, nach einer Weile aber wird sich das ändern.
Harald K. schrieb:> Es geht um prellende Kontakte. Ist der Drehgeber frisch, wird er noch> nicht so sehr prellen, nach einer Weile aber wird sich das ändern.
Wenn erst mal der Schleifkontakt kratzt, kommt der ein oder Andre evtl.
doch noch auf die Idee, da ne Entprellung zu spendieren... Wir sind doch
hier unter uns. Wir sind doch keine Profis, die auf so was verzichten
können/wollten/sollen....
Harald K. schrieb:> Es geht um prellende Kontakte.
Prellen ist ein mechanischer Vorgang. Welche Beschleunigungswerte sollen
denn auf die Kontakte wirken, damit die im Mikrosekundenbereich prellen?
Falls du nicht Prellen, sondern die Zunahme von Störungen auf Grund von
Oberflächenoxidation meinst, ist vielleicht der Strom zu gering. Das ist
aber ein völlig anderer Effekt.
Die Microsekunden sind nicht auf meinem Mist gewachsen, aber wir dürften
uns darüber einig sein, daß auch Kontaktprellen die Interruptlast
erhöht.
Und je nachdem, was der geneigte Programmierer meint, in der ISR alles
veranstalten zu müssen, kann das ein Problem werden.
Vielleicht ist es ja am besten, wenn man auf so konfliktbelastete
Eingabeelemente wie Drehgeber verzichtet, die rufen ja offensichtlich
bei gleich mehreren Fraktionen Unwohlsein und Empfindungen hervor.
(Das ist jetzt nicht an Dich, sondern an die mitfühlende Allgemeinheit
gerichtet)
Mechanik ist Heute doch eh viel zu teuer. Sensor-Tasten, WiFi... Da
heizt dir dein Kaffeewärmer, nur solang dein Handy noch Saft hat. Aber
das aufs 1/10 Grad genau. :DDD
Harald K. schrieb:> Und je nachdem, was der geneigte Programmierer meint, in der ISR alles> veranstalten zu müssen, kann das ein Problem werden.
Er muss genau den Port lesen, die beiden Pins maskieren, die beiden Bits
in die Variable mit dem alten Zustand schieben, die vier Bits (alten und
neuen Zustand) maskieren, das als Index zum Auslesen eines 4x2 const
Arrays verwenden und den Zähler entsprechend dem ausgelesenen Wert in
Ruhe lassen, inkrementieren oder dekrementieren, ggf. noch ein Flag
setzen, das in der Hauptschleife abgearbeitet wird - kein bisschen mehr.
Harald K. schrieb:> Und je nachdem, was der geneigte Programmierer meint, in der ISR alles> veranstalten zu müssen, kann das ein Problem werden.
Ja, was passiert denn da schlimmes?
Polling:
Sieht das Kontaktprellen genauso wie eine ISR. Der Unterschied ist
lediglich, dass die polling-Routine ausdrücklich darauf wartet, dass der
Kontakt endlich mal schaltet oder prellt. Und ansonsten keinerlei
Beitrag leistet, ausser andere Tasks zu blockieren.
ISR:
Die macht genau nur dann etwas, wenn tatsächlich was passiert. Ansonsten
macht sie genau nichts. Sie wird nicht mal aufgerufen. Dieses nebulös
behauptete zumüllen durch Interrupts findet nur genau in dem Maß statt
wie im polling. Und ein INT kann nur einmal erzeugt werden, da gibt es
keinen Stack oder queue. Der nächste kann erst dann kommen, wenn der
vorhergehende bearbeitet wurde.
Polling verarbeitet also exakt den gleichen Müll wie INTs, nur mit
deutlich mehr Aufwand indem es auf exakt die gleichen Signale
blockierend wartet.
Aber evtl. liegt das Problem ja im "was der geneigte Programmierer
meint, in der ISR alles veranstalten zu müssen"?
Was gedenkst Du denn da zu machen ausser Flanke feststellen, den anderen
Port zu lesen und den Wert inkrementieren/dekrementieren? Was ist da so
grundlegend komplizierter als im Polling? Oder ist eine ISR Neuland und
Teufelszeug?
Oder ist das gar Konzept von mehreren "parallel" laufenden
State-Machines noch unbekannt?
Im Endeffekt läuft das Polling darauf hinaus, dass man dann die
Display-Rountine (oder was auch immer mit dem Drehgebersignal gemacht
werden soll) in das Polling mit reinfrickelt. In der Zeit in der das
Display (oder was auch immer) passiert (ja bitte, SPI über polling!),
werden Signale vom Drehgeber ignoriert. Gewurschtel das keiner mehr
kapiert, monolithischer Code, nicht wiederverwertbar. Hauptsache es
läuft, irgendwie.
Fingerübung: Der TO möchte doch bitte noch einen velocity-Wert in seinen
Code reinpfriemeln ...
Hinweis: Jetzt wird das Prellen von Interesse. Lässt sich aber auch in
der ISR einfach behandeln/ignorieren.
Teo D. schrieb:> Mechanik ist Heute doch eh viel zu teuer. Sensor-Tasten, WiFi
Wie sieht das mechanisch Pendant von WiFi aus? Trommel? Rauchzeichen?
Du hast Touchscreens in der List nicht aufgezählt.
Nick schrieb:> dass die polling-Routine ausdrücklich darauf wartet
Was Phantasierst du da?!
Nick schrieb:> Die macht genau nur dann etwas, wenn tatsächlich was passiert.
Richtig und wenn es 1 Million mal die Sekunde sein MUSS...
Nick schrieb:> Hinweis: Jetzt wird das Prellen von Interesse. Lässt sich aber auch in> der ISR einfach behandeln/ignorieren.
Bitte ZEIGEN! Bitte!
Rahul D. schrieb:> Wie sieht das mechanisch Pendant von WiFi aus? Trommel? Rauchzeichen?
Das Pedant eines mechanischen Tasters, in Verbindung mit WiFi, nennt man
im allgemeinem Sprachgebrauch App...
Nick schrieb:> Hinweis: Jetzt wird das Prellen von Interesse. Lässt sich aber auch in> der ISR einfach behandeln/ignorieren.
Dafür müsste die ISR die Zeit kennen, d.h. der Interrupt müsste z.B. von
einem Timer kommen oder es müsste ein Uhr abgefragt werden. Wie willst
du das sonst von einer normalen Änderung (Drehrichtungsumkehr)
unterscheiden.
Wieder so ein (Freitags?-) Thread wo der TO ein paar "Tatsachen"
in den Raum wirft und danach sich einen (Sch....-) Dreck darum
kümmert was weiter passiert.
Don't feed the Trolls.
Teo D. schrieb:> Nick schrieb:>> dass die polling-Routine ausdrücklich darauf wartet>> Was Phantasierst du da?!
Äh ... schau Dir den code des TO an. Da wartet er in der "while (1)" die
ganze Zeit drauf.
Teo D. schrieb:> Nick schrieb:>> Die macht genau nur dann etwas, wenn tatsächlich was passiert.>> Richtig und wenn es 1 Million mal die Sekunde sein MUSS...
Das Polling verarbeitet die 1 Million Zustandswechsel genauso. Und wenns
10 Wechsel / s sind auch, mit 100% der Zeit im polling. Die ISR
verschwendet nur noch 1/10 der Zeit.
Teo D. schrieb:> Bitte ZEIGEN! Bitte!
Fingerübung hab ich geschrieben. Das ist also eine Aufgabe für dich oder
den TO. Tip: Lies den SysTimer aus, merk dir den Wert und ignorier den
nächsten Impuls wenn zu wenig Zeit vergangen ist (= Prellzeit).
Rainer W. schrieb:> Dafür müsste die ISR die Zeit kennen, d.h. der Interrupt müsste z.B. von> einem Timer kommen oder es müsste ein Uhr abgefragt werden.
Ja, velocity ist Geschwindigkeit. Und die ist nun mal zeitbehaftet. Für
die Zeit brauchts aber keinen Interrupt, es genügt ein frei laufender
Timer der ohne CPU-Last in Hardware läuft. Schlimm?
Leute, denkt doch einfach mal selbst über das Thema nach! Warnung: Das
ist nicht in 5 Minuten erledigt.
Joachim B. schrieb:> ich hatte PeDas Entprellroutinen für Tasten und> Encoder sogar zusammen nutzen können, eigentlich kann man ALLES mit> einem timer erschlagen
Ist mittlerweile Standard bei meinem Code. Und die Timer-ISR kann dabei
noch beliebige andere Sachen bearbeiten, ohne das Encoder oder Knöpfchen
dabei zu kurz kommen. Praktisch ist jede Timer ISR ein geeignetes
Plätzchen.
Nick schrieb:> Polling:> Sieht das Kontaktprellen genauso wie eine ISR. Der Unterschied ist> lediglich, dass die polling-Routine ausdrücklich darauf wartet, dass der> Kontakt endlich mal schaltet oder prellt.
Auch wenn andere schon mit Zaunpfählen gewunken haben:
Pollen wartet nicht.
Harald K. schrieb:> Pollen wartet nicht.
Ah, neusprech!
Der code des TO frägt immer wieder 2 ports ab. Erst wenn sich was ändert
tut er was. Für mich ist das "warten". Dumm rumstehen und warten, bis
was passiert.
Wie ist jetzt Dein Wort dafür?
Wikipedia taugt aber nicht dafür:
"Ein möglicher Zweck des Pollings ist das aktive Warten auf
Zustandsänderungen, auch Spinning genannt. Eine andere Form ist die
Abfrage jeweils einmal in einem Abtastzyklus, oder die Abfrage nach
jeweils einer anderen Aktivität."
Nick schrieb:> Der code des TO
Wir reden schon seit Tagen??? Von der Technik des Polling. Nicht über
die Fähigkeiten des TOs, dies auch korrekt umzusetzen!
Nick schrieb:> Der code des TO frägt immer wieder 2 ports ab. Erst wenn sich was ändert> tut er was.
Ist dieser Code der Referenzcode, der definiert, was Polling ist?
Pollen an sich definiert noch überhaupt nicht ob und wie gewartet wird.
Sondern nur die Eigenschaft, dass nicht etwas auf Zuruf von Extern
passiert wie mit einem Interrupt, sondern von Intern eine Abfrage wie
auch immer losgetreten wird.
Teo D. schrieb:> Wir reden schon seit Tagen??? Von der Technik des Polling. Nicht über> die Fähigkeiten des TOs, dies auch korrekt umzusetzen!
Ah, jetzt kommen wir zusammen. Ich hab nur einen Hinweis gesehen, wie
man das polling besser machen könnte. In einem timer-INT. Ja, das ist
"non-blocking", im Gegensatz zum TO, das blocking ist. Für non-blocking
tuts auch eine FSM die zyklisch aufgerufen wird*). Warum man das Polling
in einen timer-INT setzen will, zusammen mit anderem Gedöns (gibt wieder
Spaghetti-code), erhellt sich mir nicht. Dann doch gleich eine ISR die
genau nur das Eine macht was man will und dadurch wiederverwertbar ist.
Ich geb zu, das ist ein verwegener Ansatz für Leute, bei denen ein
Programm aus genau einer C-Datei besteht.
*) Das birgt aber die Gefahr, dass Schritte verloren gehen. Was wieder
zur ISR führt. Aber die ist ja kompliziert und Teufelszeug. Jetzt bleibt
euch nur noch ein RTOS ...
Nick schrieb:> Ah, jetzt kommen wir zusammen. Ich hab nur einen Hinweis gesehen, wie> man das polling besser machen könnte. In einem timer-INT. Ja, das ist> "non-blocking", im Gegensatz zum TO, das blocking ist
Du hat keine Ahnung, hast das noch nie gemacht, es noch nicht einmal
gesehen wie es richtig gemacht wird und ERZÄHLST UNS HIER EINEN.... Sag
mal bist du Live auf Twitch?!
Gustl B. schrieb:> Und das ist nicht Warten. Es wird etwas gemacht und das kostet CPU Zeit.
Es wird nichts gemacht, nur Zeit verbraten, es wird gewartet um etwas
machen zu können. Und das kostet Zeit. Immer wieder nachsehen, ob sich
was geändert hat, statt zu sagen "Ruf mich an, wenn das passiert ist".
Die Referenz ist nun mal der code des TO. Polling in seiner (dümmsten)
Reinstform. Etwas weniger dumm ist es, immer nur kurz nachzusehen, ob
sich was geändert hat. Zerhacktes warten halt. Geht aber manchmal nicht
anders, das geb ich zu. Dafür eignen sich non-blocking FSMs. Der code
des TO ist aber nun mal weder eine FSM noch non-blocking.
Nick schrieb:>> Nick schrieb:>>> dass die polling-Routine ausdrücklich darauf wartet>>>> Was Phantasierst du da?!>> Äh ... schau Dir den code des TO an. Da wartet er in der "while (1)" die> ganze Zeit drauf.
Ja. Das ist aber kein "Polling" sondern "busy waiting". Denn er macht in
der Schleife nichts anderes. Ist ja auch nur ein Beispiel.
Polling - insbesondere in Verbindung mit der Auswertung von Tasten oder
Drehgebern - nennt man das zyklische Abfragen der Schaltzustände.
Unabhängig davon ob sich da irgendwas geändert hat oder nicht. Für
manuell bediente Taster oder Drehgeber reichen 2ms Zykluszeit aus, oft
auch 10ms. Da das Abfragen der Zustände nur ein paar Dutzend Taktzyklen
braucht und die Taktfrequenz typisch bei 1Mhz oder noch höher liegt,
braucht Polling wenig - und vor allem konstante - Rechenzeit.
Polling heißt auch nicht "keine Interrupts". Im Gegenteil. Das Polling
macht man geschickterweise in einem Timerinterrupt. Aber wenn das nicht
geht, dann eben in der Hauptschleife.
Teo D. schrieb:> Du hat keine Ahnung, hast das noch nie gemacht, es noch nicht einmal> gesehen wie es richtig gemacht
Ah, jetzt kommen endlich die wahren Argumente! Ich geb mich geschlagen!
Axel S. schrieb:> Ja. Das ist aber kein "Polling" sondern "busy waiting". Denn er macht in> der Schleife nichts anderes. Ist ja auch nur ein Beispiel.
Da sagt Wikipedia aber was anderes. Schon klar, Wiki ist keine Referenz.
Und ist ja auch nur ein Beispiel für Polling.
Axel S. schrieb:> Unabhängig davon ob sich da irgendwas geändert hat oder nicht.
Also warten in kleinen Zeitscheiben. Zeitverschwendung.
Axel S. schrieb:> Polling heißt auch nicht "keine Interrupts". Im Gegenteil. Das Polling> macht man geschickterweise in einem Timerinterrupt.
Zeitverschwendung in Interrupts, statt einen INT wenns wirklich was zu
tun gibt. Wo ist da jetzt der Zeitgewinn? Ja, Prellen, ich schenk dir 2
Widerstände und zwei Kondensatoren wenn dir das den Schweiß auf die
Stirn treibt. Nebenbei: Prellen ist kein Dauerzustand, sondern eine
Ausnahme.
Axel S. schrieb:> braucht Polling wenig - und vor allem konstante - Rechenzeit.
Braucht immer Rechenzeit, egal ob was zu tun ist oder nicht. Die neue
Art der Effektivität.
Ich sags nochmal (und Gott sei Dank zum letzten Mal):
Polling ist ineffektiv, es geht oft eleganter und einfacher.
Diese Diskussion gab es hier schon öfters,
und kehrt immer wieder, wo Hardware-Interrupts
verteufelt wird. Ich frage mich, wieso hat der
Hersteller das überhaupt in seine Controller
und Mikroprozessoren eingebaut, wenn daß solche
schlimme Sache ist? Für irgendwas muß das doch
gut sein.
Das folgende ist aus:
https://de.wikipedia.org/wiki/Interrupt
Vorteile gegenüber dem Polling
Neben Interrupts gibt es lediglich die Technik des programmierten
(zyklischen) Abfragens (Polling), um den Status von Ein-/Ausgabegeräten,
Prozessen oder anderem zu erfahren. Diese Methode ist zwar einfacher und
benötigt keine zusätzliche Hardware, ist allerdings sehr viel
ineffizienter als die Arbeit mit Interrupts, da sie die CPU viel stärker
in Anspruch nimmt. Zudem hängt die Reaktionsgeschwindigkeit beim Polling
davon ab, wie viel Zeit zwischen den Abfragen vergeht – dies kann bei
Situationen, die eine sofortige Reaktion verlangen, kritisch sein. Bei
Multitasking-Betriebssystemen ist das Polling als alleinige Methode
nicht möglich.
Die Standard-Analogie für Interrupts im Alltag ist eine Tür mit Klingel:
Während man seine Aufgaben erledigt, kann man jederzeit durch die
Klingel unterbrochen werden, wenn ein Gast eine „Abarbeitung“ wünscht,
und sich ihm dann zuwenden. Beim Polling – also ohne Klingel – müsste
immer wieder an der Tür nachgeschaut werden, ob Besuch da ist oder
nicht. Beim Erhitzen von Milch hingegen ist es wohl besser, nicht erst
auf den „Interrupt“ des Überkochens zu warten, sondern den Prozess
regelmäßig zu überwachen.
Moin,
wenn ich mich richtig erinnere, habe ich nach der ersten fallenden
Flanke von B in der ISR weitergezählt mit der Richtung von A.
Gleichzeitig in der ISR den INT von B gesperrt. In der ISR von A dann
nur den INT von B wieder eingeschaltet. Kein Pollen, kein Vergleichen
mit vorigen Werten, kleines Programm, schnell und zuverlässig. Probleme
gab es nur mit der steigenden Flanke von A und B, die anders als im
Datenblatt beschrieben, eher zeitgleich kamen. Viel Erfolg
Gruß
Carsten
Günter L. schrieb:> wo Hardware-Interrupts> verteufelt wird.
Das ist doch gar nicht wahr. Hardware Interrupts sind eben dann
schlecht, wenn du einen prellenden Kontakt abfragen willst, was bei
Encodern nun mal oft der Fall ist. So ein Kontakt feuert eben nicht nur
einmal, sondern u.U. dutzende Male pro Schritt.
Wenn deine INT Quelle prellfrei ist, spricht nichts gegen Hardware
Interrupts.
Die Timer Methode funktioniert zuverlässig auch bei alten und
verdreckten Encodern, ist konfigurierbar und vorhersehbar in der
Laufzeit. Warum also sollte man das Rad immer wieder neu erfinden?
Aber diese Diskussion muss man auch nicht immer wieder neu anfangen.
Nick schrieb:> Ich sags nochmal (und Gott sei Dank zum letzten Mal):> Polling ist ineffektiv, es geht oft eleganter und einfacher.
Du verstehst offensichtlich unter pollen etwas anderes als die meisten
hier.
Falls Du unter pollen das verstehst, was der TO tut, dann ist das nicht
gemeint. Der Code ist der erste, lehrreiche Versuch eines totale
Anfängers und dazu ok. Niemand würde sowas nutzen wollen.
Pollen ist das übliche Verfahren, um mit minimaler
worst-case-Rechenleistung mit prellenden Signalen umzugehen. Dass es
auch mit HW geht, geschenkt. Aber HW erfordert halt ... HW. und ist
damit z.B. nicht flexibel.
Natürlich gibt es Grenzen. Z.B. dort, wo Signale mit dem SysTicker nicht
mehr aufgelöst werden können (> 6000 / min oder 100/s).
Mache Dich einfach mal damit vertraut, Du wirst sehen, welche neuen
Möglichkeiten sicher ergeben und wie einfach vieles wird.
Nick schrieb:> Nebenbei: Prellen ist kein Dauerzustand, sondern eine> Ausnahme.
Das kommt drauf an, ob der Drehgeber gerade auf einer Signalwechselkante
"steht" und wie die Spur abgetastet wird. Nur rastende Geber können
sicher stellen, dass der Geber nicht an der Kante hängt. Bei optisch
abtastenden ohne Rastung kann an der Kante viel passieren - je nach
Hardware.
Rainer W. schrieb:> Nick schrieb:>> Nebenbei: Prellen ist kein Dauerzustand, sondern eine>> Ausnahme.>> Das kommt drauf an, ob der Drehgeber gerade auf einer Signalwechselkante> "steht". Nur rastende Geber können sicher stellen, dass das nicht der> Fall ist.
Darauf kommts doch gar nicht an. Wenn so ein Drehgeber prellt und
kratzt, zählt das rasant auf und ab und wird zum Zufallsgenerator.
zB: für 4-80€ zu haben:
https://www.coole-gadgets.com/digitaler-kuechentimer-mit-magnethalterung/
Da muss man immer so lange links/rechts ruckeln, bis man nahe an der
gewünschten Zeit ist und dann ganz vorsichtig anschleichen... :DDD
Teo D. schrieb:> Darauf kommts doch gar nicht an. Wenn so ein Drehgeber prellt und> kratzt, zählt das rasant auf und ab und wird zum Zufallsgenerator.
Was heißt "Zufallsgenerator"?
Wenn das Signal hin und her springt, gibt es einen wohl definierte
Position, die in dem Fall zwischen den beiden Zählerständen liegt. Da
der Zähler digital arbeitet, kann er den Zwischenwert, der der
tatsächlichen Position entsprechen würde, nun mal nicht anzeigen. Eine
Möglichkeit wäre, die Springerei durch eine Hysterese für die Erkennung
der Richtungsumkehr zu unterbinden.
Rainer W. schrieb:> Bei optisch> abtastenden ohne Rastung kann an der Kante viel passieren - je nach> Hardware.
Die Tage ist sogar einer explodiert. Der hatte vergessen, seine
Hysterese einzustecken.
Zittern, Surren, Vibrieren, Jittern, Klingeln, Jauchzen, Frohlocken - da
kann man nur noch Prollen.
Rainer W. schrieb:> Teo D. schrieb:>> Darauf kommts doch gar nicht an. Wenn so ein Drehgeber prellt und>> kratzt, zählt das rasant auf und ab und wird zum Zufallsgenerator.>> Was heißt "Zufallsgenerator"?> Wenn das Signal hin und her springt, gibt es einen wohl definierte
Da hats doch drei Kontakte die schleifen, wenn man denn das
betätigt.......................... .....-.. ..
Wie oben schon verlinkt. Du kannst dir ein gut "funktionierendes"
Beispiel für 3,95€ bei Temu bestellen. Ein paar mal hin und her gedreht
(o. auch ein paar mehr), geben die verbauten Kontakte ihre wahre, dunkle
Seele preis.
Man muss nur genügend Affen und Schreibmaschinen zur Verfügung haben, um
einen Roman zu schreiben!
Teo D. schrieb:> Da hats doch drei Kontakte die schleifen, wenn man denn das> betätigt.......................... .....-.. ..
Wenn der gemeinsame Kontakt macht was er will, würde der Zähler nicht
definiert zwischen zwei Werten hin und her springen und auch Polling
würde das Problem nicht lösen.
Da hilft dann nur /dev/nul
Rainer W. schrieb:> Wenn der gemeinsame Kontakt macht was er will, würde der Zähler nicht> definiert zwischen zwei Werten hin und her springen und auch Polling> würde das Problem nicht lösen.
Ach, ein klein wenig oversampling, in die Entprellung noch eine kleine
Zustandsbestätigung* eingebaut, 3-5x reichen da dicke und du hast
jahrelang, an den billigsten Alps, Spas bis zum abwinken. :)
*) Na ja, ersetzt sie quasi. :)
Ich denke, mit meiner Einschätzung von heute richtig gelegen zu haben:
Vielleicht ist es ja am besten, wenn man auf so konfliktbelastete
Eingabeelemente wie Drehgeber verzichtet, die rufen ja offensichtlich
bei gleich mehreren Fraktionen Unwohlsein und Empfindungen hervor.
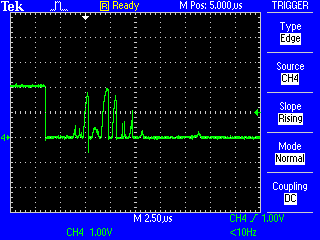
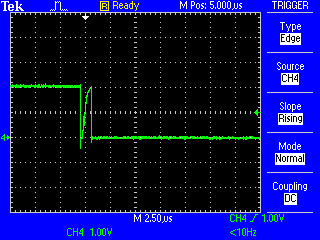
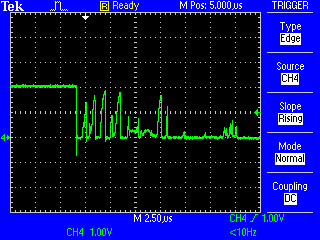
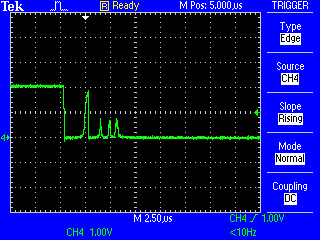
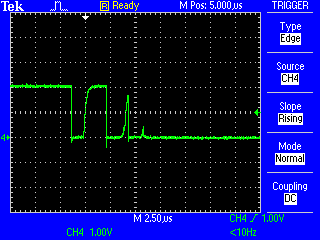
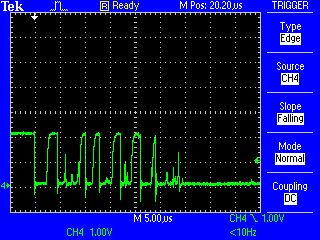
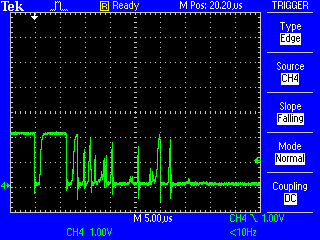
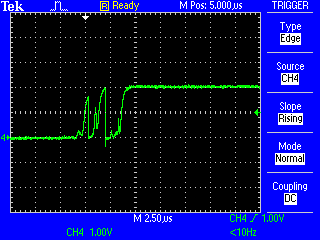
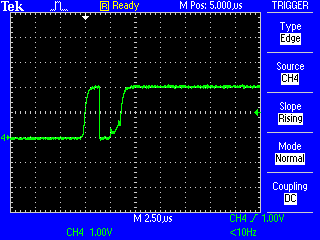
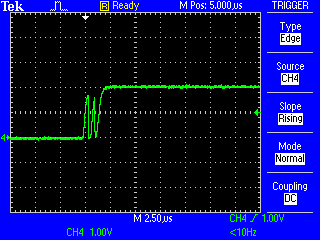
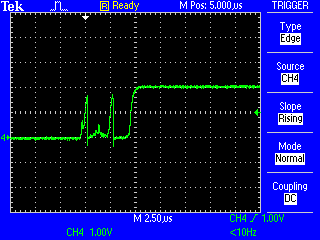
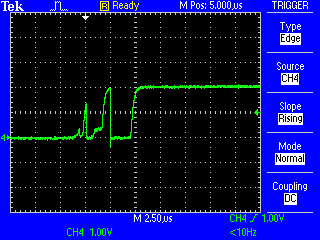
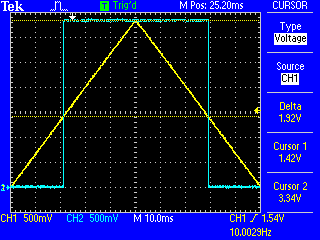
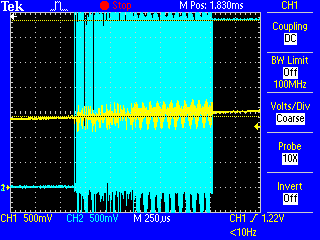
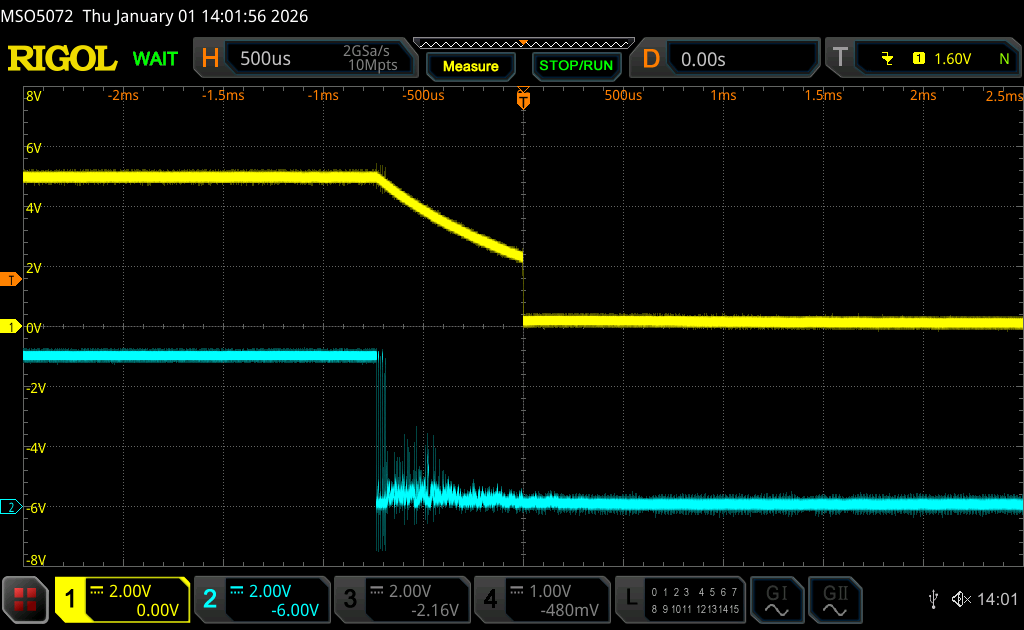
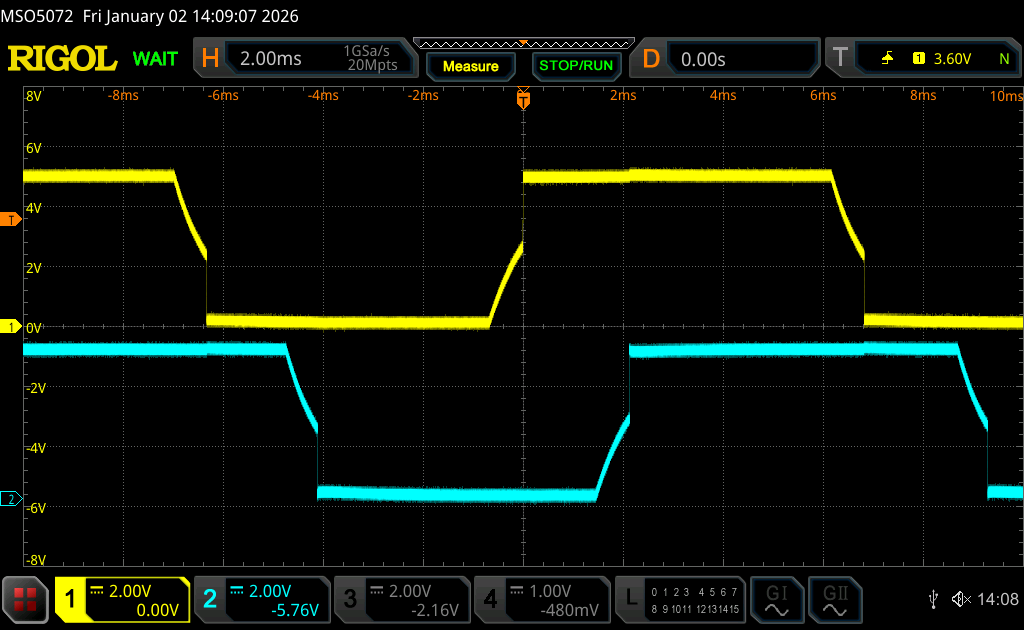
Damit die Flankeninterruptfraktion mal einen Eindruck davon bekommt, wie
wild ein Schaltvorgang bei einem mechanischen Encoder aussehen kann,
habe ich einen Panasonic-Encoder, wie es ihn es eine Zeit lang bei
Pollin zu kaufen gab, ans Oszi angeschlossen. In den Beispielen ffl5.png
und ffl6.png dauert das Prellen fast 30µs lang. Von den vielen Flanken,
die dabei entstehen, triggert die erste einen Interrupt. Tritt die
zweite Flanke auf, Während die Interruptroutine noch läuft, wird
zunächst das Interruptflag erneut gesetzt und nach Beendigung der
Interruptroutine diese sofort ein zweites Mal aufgerufen, d.h. auch die
zweite Flanke wird noch registriert. Tritt zeitnah aber noch eine dritte
Flanke auf, geht diese verloren, was zu einem Zählfehler führt. Treten
(wie in den Beispielen) weitere Flanken in kurzer Folge auf, können auch
diese (zumindest teilweise) verlorengehen, was den Zählfehler
entsprechend vergrößert.
Verwendet man eine periodische Abtastung statt der flankengetriggerten
Interrupts, tritt dieses Problem prinzipbedingt nicht auf.
Für die, die sich Sorgen wegen der dauerhaft verbrauchten CPU-Zeit
Sorgen machen: Für manuell betätigte Encoder ist eine Abtastperiode von
1ms völlig ausreichend. Die Dauer einer Abtastung inkl. Auswertung
beträgt auf einem 16MHz-AVR weniger als 2µs. Somit werden dafür gerade
einmal 2µs / 1ms = 0,2% CPU-Zeit benötigt, was nicht sonderlich ins
Gewicht fällt. Auch die 2µs, in der die CPU periodisch mit der
Auswertung beschäftigt ist, werden i.Allg. kaum stören, schon gar nicht
angesichts der fast 30µs, die die Flankeninterruptmethode im worst Case
mit der Auswertung eines einzelnen (prellenden) Schaltvorgangs
verbringt.
Mittels Tiefpässen an den A-und B-Signaleingängen kann man unter Nutzung
der Schmitttrigger-Charakteristik der AVR-Eingänge prinzipiell auch die
Flankentriggermethode zum Laufen bringen. Ich persönlich würde aber die
vier zusätzlichen Bauteile einsparen und bevorzuge die Softwarelösung.
Diese hat zudem den Vorteil, dass sie auch für Mikrocontroller ohne
Hysterese an den Eingängen funktioniert.
Harald K. schrieb:> Vielleicht ist es ja am besten, wenn man auf so konfliktbelastete> Eingabeelemente wie Drehgeber verzichtet, die rufen ja offensichtlich> bei gleich mehreren Fraktionen Unwohlsein und Empfindungen hervor.
Dabei eignen die sich wunderbar, um geplante Obsoleszenz geschickt in
Produkten zu verstecken.
Die Auswertung aus dem Timer-Interrupt funktioniert einfach dauerhaft,
auch wenn der Drehgeber seine 100000 Umdrehungen aus dem Datenblatt
hinter sich hat. Und danach vermutlich noch 10-mal so lange.
Die Auswertung mit Flanken-Interrupts funktioniert die Garantiezeit des
Geräts ausreichend gut, wird dann schnell immer schlechter, und kurz
nach Garantieablauf springt der Stellwert wild durch die Gegend, mal
hoch mal runter, gerne auch mal 20 Schritte in einer Rastung, egal in
welche Richtung man den Drehgeber dreht. Oder das Gerät stürzt gleich
ab. Der Kunde kauft dann entnervt ein Neues.
Also: Aus BWL-Sicht ist die Flanken-IRQ-Lösung deutlich besser. Und was
für große Firmen gut ist, kann doch für uns kleine Bastler nicht
schlecht sein, oder?
Ich hatte schon mal eine Steuerung für eine Flügelzellenpumpe, die durch
Drehgeber-Interrupts sogar abgestürzt ist: da war ein optischer Encoder
mit einer Auflösung von 2048 Strichen für die Positionsermittlung einer
Pumpenachse zuständig. Weil das ein elektronischer Ausgang war, prellte
da also nicht mal was. Das ging dann auch alles gut, solange das
Getriebe spielfrei war und das zu pumpende Medium eine ausreichend hohe
Viskosität hatte. Wenn dann aber Alterung und ein dünnflüssiges Medium
zusammenkamen, konnte bei sehr langsamen Geschwindigkeiten der Regler
ein wenig hektisch werden und leicht ins Schwingen kommen. Wenn das dann
grade an einem Pegelwechsel war, dann wurde der Rechner mit Interrupts
zugetextet, bis der Stack überlief und das Ding einen Reset machte. Weil
der Reboot weniger als eine Sekunde dauerte, störte es die User nicht
weiter. Und das Vibrieren hörte auf, weil die Pumpe beim Starten zum
Gebertest ein paar Striche weiterfuhr.
Und weil das niemanden störte, haben wir diesen Fehler erst nach 30
Jahren bei einem Redesign dieser Steuerung gesehen, gefunden und
behoben.
Günter L. schrieb:> Ich frage mich, wieso hat der Hersteller das überhaupt in seine> Controller und Mikroprozessoren eingebaut, wenn daß solche> schlimme Sache ist? Für irgendwas muß das doch gut sein.
Historisch sind Interrupts für Unterbrechungsanforderungen aus anderen
elektronischen Bausteinen oder von anderen Softwaremodulen heraus
vorgesehen (DMA, Timer, Serielle Schnitte, Interfaces,
BIOS-Interrupts...). Dass man da auch unkonditionierte, prellende
manuelle Signalgeber anschließen kann, auf diese Idee wäre zum damaligen
Zeitpunkt keiner der Entwickler gekommen.
> Für irgendwas muß das doch gut sein.
Es liegt immer im Ermessen des Entwicklers, wofür er die Ressourcen
seines Bausteins verwendet. Und auch, ob diese Lösung für die gestellte
Aufgabe gut ist.
Εrnst B. schrieb:> Die Auswertung mit Flanken-Interrupts funktioniert die Garantiezeit des> Geräts ausreichend gut, wird dann schnell immer schlechter, und kurz> nach Garantieablauf springt der Stellwert wild durch die Gegend, mal> hoch mal runter
Ich persönlich bekomme die Galle, wenn ich wieder mal so ein
herumzickendes Gerät mit Drehgeber habe und ich den Programmierfehler
in dessen Software direkt vor meinem geistigen Augen sehe. Und dann
wünsche ich diesen und überhaupt allen Softwareentwicklern, dass sie
lauter Geräte mit ebensolch guter Software bekommen, wie sie selber ihre
Software schreiben.
Lothar M. schrieb:> Ich persönlich bekomme die Galle, wenn ich wieder mal so ein> herumzickendes Gerät mit Drehgeber habe
Hmm. Im Büro hatten wir einen ganzen Stapel einfacher
Hameg-Oszilloskope, die wegen ihrer Drehgeber unbrauchbar wurden. Bei
einigen haben wir dann den Aufwand getrieben, die Dinger zu ersetzen,
aber das ist eine zeitraubende Aktion ... die anderen kamen in den
Keller. Der ist bei uns die Vorstufe für den Elektroschrott.
Yalu X. schrieb:> Ich persönlich würde aber die> vier zusätzlichen Bauteile einsparen und bevorzuge die Softwarelösung.> Diese hat zudem den Vorteil, dass sie auch für Mikrocontroller ohne> Hysterese an den Eingängen funktioniert.
Ein sehr interessanter Aspekt, den ich gerne nachvollziehen möchte. Gut
informiert, wie Du immer bist (kein Scherz!), kannst Du mir bestimmt
einen handelsüblichen µC empfehlen, der an seinen Eingängen keine
Schmitttrigger hat. Ich brauche noch dringend ein Weihnachtsgeschenk für
mich!
Als Festtagsmenü kommen dieses Jahr übrigens Angsthasen auf den Teller -
anders wird man die wohl nicht los.
Bereits eingangs wurden dem TO Lösungsmöglichkeiten für sein Problem
gezeigt. Ich hoffe, er ist längst fertig, obwohl in seinem
'proppenvollen' Programm sicherlich noch zwei bis drei Bit einzusparen
wären. Mach mal ein Foto!
Wir können derweil noch darüber sprechen, warum UPN die einzig sinnvolle
Eingabemethode bei Taschnerechnern, FORTH die einzig wahre
Programmiersprache und Festkommaarithmetik 'float'-Berechnungen in der
praktischen Anwendung haushoch überlegen sind.
Das hatten wir jetzt schon länger nicht mehr.
Kaputte Drehgeber war bei mir der Grund, ein HiFi Gerät zu entsorgen. 1x
konnte ich ihn erneuern. Beim zweiten mal habe ich mit einem anderen
getauscht der nur selten benutzt wurde. Beim dritten mal habe ich kein
Ersatzteil mehr gefunden. Eigentlich schade umd Gerät.
Lothar M. schrieb:> Εrnst B. schrieb:>> Die Auswertung mit Flanken-Interrupts funktioniert die Garantiezeit des>> Geräts ausreichend gut, wird dann schnell immer schlechter, und kurz>> nach Garantieablauf springt der Stellwert wild durch die Gegend, mal>> hoch mal runter> Ich persönlich bekomme die Galle, wenn ich wieder mal so ein> herumzickendes Gerät mit Drehgeber habe und ich den Programmierfehler> in dessen Software direkt vor meinem geistigen Augen habe. Und dann> wünsche ich diesen und überhaupt allen Softwareentwicklern, dass sie> lauter Geräte mit ebensolch guter Software bekommen, wie sie selber ihre> Software schreiben.
Dem kann ich nur zustimmen. Mein Philips DAB Radio (AJB3552/12) nervt
mich beim Weckzeit einstellen genau damit. Es wird zum Geduldsspiel.
Lothar M. schrieb:> Das ging dann auch alles gut, solange das> Getriebe spielfrei war und das zu pumpende Medium eine ausreichend hohe> Viskosität hatte. Wenn dann aber Alterung und ein dünnflüssiges Medium> zusammenkamen, konnte bei sehr langsamen Geschwindigkeiten der Regler> ein wenig hektisch werden und leicht ins Schwingen kommen.
Modellbauservos haben das schon seit langer Zeit durch eine Hysterese
für die Richtungsumkehr (aka tote Zone) gelöst.
Lothar M. schrieb:> Ich hatte schon mal eine Steuerung für eine Flügelzellenpumpe, die durch> Drehgeber-Interrupts sogar abgestürzt ist: da war ein optischer Encoder> mit einer Auflösung von 2048 Strichen für die Positionsermittlung einer> Pumpenachse zuständig.
Selber hatte ich auch einmal einen UKW-Empfänger eines dt.
Edelherstellers, wo ein optischer Encoder mit ca. 200
'Strichen'/Umdrehung verbaut war. Durch Drehdynamik und etwas Masse des
Schwungrades, war die Bedienung so angenehm wie seinerzeit bei einem
Röhrenradio mit Seilzug und Skala.
Alles ermöglicht per Flankeninterrupts am µC. Der µC war ein
8051-Derivat, der C-Compiler von Keil und das Programm dafür habe ich
auch noch.
Angenehm und nützlich: wenn keine Bedienung erfolgte, lag der µC im
Tiefschlaf und störte nicht den Empfang ;-)
Mi N. schrieb:> kannst Du mir bestimmt> einen handelsüblichen µC empfehlen, der an seinen Eingängen keine> Schmitttrigger hat. Ich brauche noch dringend ein Weihnachtsgeschenk für> mich!
Tja, dann war Weihnachten wohl schon.
Bei den Picos kann man in den PAD Einstellungen den Schmitt-Trigger pro
GPIO gezielt ein- und aussschalten.
Frohes Fest.
Edit:
Eine RC-Kombination und beim Durchgang bei 1/2 der Versorgungsspannung
gibt's ein wildes 1/0/1/0/… Lesen.
Rainer W. schrieb:> Prellen ist ein mechanischer Vorgang. Welche Beschleunigungswerte sollen> denn auf die Kontakte wirken, damit die im Mikrosekundenbereich prellen?
Du hast noch nie mit der Praxis zu tun gehabt.
https://www.ganssle.com/debouncing.htm
20us bis 157ms.
Günter L. schrieb:> Die Standard-Analogie für Interrupts im Alltag ist eine Tür mit Klingel
Klingelstreiche, klemmende Taster, und Beschäftigungen die ihrerseits so
laut sind dass man die Klingel nicht hört sind dir offenbar nie
begegnet.
Besser also jede Minute nachgucken ob jemand vor der Tür steht. Im
Gegensatz zum Mensch kostet das den uC nichts, ob der nun
1
while(1)
2
{
3
}
oder
1
while(1)
2
{
3
poll_keys();
4
}
macht ist ihm völlig egal, kostet denselben Strom.
Mi N. schrieb:> Bereits eingangs wurden dem TO Lösungsmöglichkeiten für sein Problem> gezeigt
Er hatte bereits eine Lösung.
Du hast sie nur nicht verstanden und willst ihm deine dümmere Methode
als angebliche Lösung verkaufen.
Michael B. schrieb:> kostet denselben Strom.
Willst du das nochmal überdenken? Aktuelle Mikrocontroller sparen bei
vernünftiger Programmierung erheblich Strom, wenn sie nichts zu tun
haben.
Nemopuk schrieb:> Michael B. schrieb:>> kostet denselben Strom.>> Willst du das nochmal überdenken? Aktuelle Mikrocontroller sparen bei> vernünftiger Programmierung erheblich Strom, wenn sie nichts zu tun> haben.
Wie alt bist du, Fünf?
Nemopuk schrieb:> Teo D. schrieb:>> Wie alt bist du, Fünf?>> unwahrscheinlich und irrelevant. Ich würde gerne beim Thema bleiben.
Beim Stromverbrauch moderner µCs.... :DDD Du BIST Fünf!
Nemopuk schrieb:> Willst du das nochmal überdenken?
Willst du das Beispiel noch mal lesen und verstehen ?
Es ist dort genau so wie beschrieben.
Dass es anders gemacht vielleicht anders wäre, oh, welche Überraschung.
Aber meistens steht ja noch mehr in der loop.
Mi N. schrieb:> Gut informiert, wie Du immer bist (kein Scherz!), kannst Du mir> bestimmt einen handelsüblichen µC empfehlen, der an seinen Eingängen> keine Schmitttrigger hat.
Die meisten mir bekannten µC (isnbesondere AVR, RP2040 (deaktivierbar)
und CH32Vxxx) haben tatsächlich Schmitttriggereingänge. Die wenigen mir
bekannten Ausnahmen sind ESP8622, ESP32, ESP32-S[23] und ESP32-C3, die
aber alle noch sehr handelsüblich sind (du wolltest ja nur eine
Empfehlung ;-)). Neuere ESPs (ESP32-C5, ESP32-C61, ESP32-H2 und
ESP32-P4) haben eine softwaremäßig (de)aktivierbare Hysterese.
wolle_wolle interessiert das Thema seit seiner Thread-Eröffnung wohl
nicht mehr.
Schön losgetreten, bei der Drehgeber-Auswertung kommen immer wieder
interessante, gegenseitige Anfeindungen hoch.
Langsam glaube ich wirklich, dass hier Soziologen o.ä. Studien betreiben
:-)
Mi N. schrieb:> Wir können derweil noch darüber sprechen, warum UPN die einzig sinnvolle> Eingabemethode bei Taschnerechnern, FORTH die einzig wahre> Programmiersprache und Festkommaarithmetik 'float'-Berechnungen in der> praktischen Anwendung haushoch überlegen sind.
Der Liste hinzuzufügen wäre, printf unabhängig von den verfügbaren
Ressourcen zu vermeiden, wie das Weihwasser durch Teufel. Oh, und auch
nie, niemals nie einen Debugger zu verwenden, sondern "Debugausgaben".
Mi N. schrieb:> Festkommaarithmetik 'float'-Berechnungen in der> praktischen Anwendung haushoch überlegen sind.
Also ich mag ja so etwas auf'm Pico
(mit einer flugs gedengelten Klasse wenn's etwas genauer sein darf):
Yalu X. schrieb:> Die meisten mir bekannten µC (isnbesondere AVR, RP2040 (deaktivierbar)> und CH32Vxxx) haben tatsächlich Schmitttriggereingänge. Die wenigen mir> bekannten Ausnahmen sind ESP8622, ESP32, ESP32-S[23] und ESP32-C3
Die ESP kenne ich garnicht. Da habe ich mir die Datenblätter wiederholt
angesehen und festgestellt, daß diese Controller für meine Anwendungen
nur suboptimal sind. Wenn in den Datenblättern eine Eingangshysterese
nicht explizit erwähnt ist, würde ich trotzdem vermuten, das eine
vorhanden ist. Ein linearer Betrieb von digitalen Schaltungen ist sicher
nicht gewünscht.
Testen könnte man die Eingänge, indem man einen RC-Oszillator aufbaut:
Eingang mit C gegen GND und Widerstand zu einem anderen Ausgang, der das
Eingangssignal invertiert.
Mit Deinem Oszilloskope kannst Du bestimmt die Hysterese am Eingang
sehen, ohne Explosionsgefahr ;-)
Unbeabsichtigt ist mir das auch bei einem ..1G04 Inverter begegnet, wo
ca. 100 mVss zu sehen waren.
Wenn Dir Teile fehlen, kann ich Dir gerne Rs und Cs im 0805 Gehäuse
zuschicken. Die brauchst Du allein schon, um die Schaltkontakt
'freizubrennen'.
Ja, der RP2040 hat seine Eingangshysteresen nach dem Einschalten
aktiviert. Dafür hat der Hersteller bestimmt wichtige Gründe. Die
Hysterese abzuschalten sollte man daher Profis überlassen, die eine
passende LIB schreiben können. Ich traue mich da nicht dran.
Mi N. schrieb:> Wenn in den Datenblättern eine Eingangshysterese nicht explizit> erwähnt ist, würde ich trotzdem vermuten, das eine vorhanden ist.
Selbst wenn das der Fall wäre, könnte man sich ohne entsprechende
Angaben im Datenblatt nicht darauf verlassen.
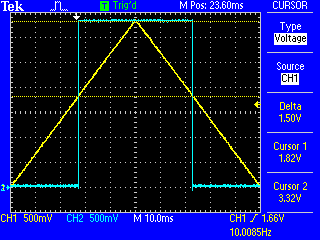
Um die Hysterese der GPIOs zu testen, habe ich mal für den ESP32-C3 und
den RP2040 ein Progrämmchen geschrieben, das nichts weiter tut als
ständig von einem Digitaleingang ein Signal zu lesen und dieses auf
einem Digitalausgang auszugeben. An den Eingang habe ich ein
Dreiecksignal mit 10 Hz und 0,0V..3,3V angelegt. Das Eingangs- und das
Ausgangssignal habe ich ans Oszi geschickt, wo man die Hysterese (falls
vorhanden) erkennen und messen kann. Die 10 Hz sind langsam genug, um
die Verzögerung des Ausgangs- gegenüber dem Eingangssignal durch die
Software vernachlässigen zu können.
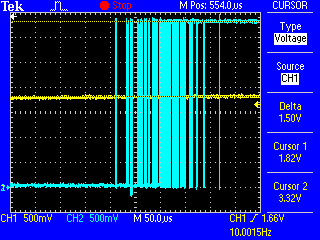
esp32-c3-1.png: Die Schaltschwellen für das ansteigende und das
abfallende Signal sind gleich -> keine Hysterese.
esp32-c3-2.png: Wie zuvor, aber mit anderer Zeitbasis. Man erkennt dass
der erfasste Logikpegel im Bereich der Schaltsachwelle stark zappelt.
rp2040-mh-1.png: Die Schaltschwellen für das ansteigende und das
abfallende Signal liegen etwa 500 mV auseinander -> Hysterese.
rp2040-mh-2.png: Wie zuvor, aber mit anderer Zeitbasis. Die Hysterese
sorgt für einen sauberen Low-High- und High-Low-Übergang.
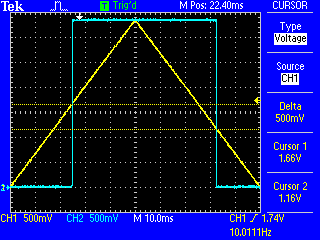
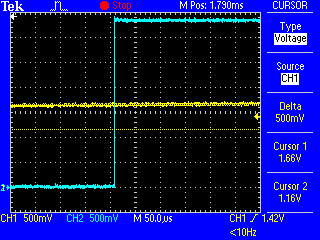
rp2040-oh-1.png: Die Hysterese wurde softwaremäßig deaktiviert, die
Schaltschwellen für das ansteigende und das abfallende Signal sind
gleich -> keine Hysterese.
rp2040-oh-2.png: Wie zuvor, aber mit anderer Zeitbasis. Man erkennt dass
der erfasste Logikpegel im Bereich der Schaltsachwelle stark zappelt.
Durch das recht deutloche Übersprechen des Ausgangs auf den Eingang
dauert das Gezappel sogar noch deutlich länger als beim ESP32-C3.
Danke!
Fazit für mich: die ESP geben ein schlechtes Bild ab, da ja wohl alle
GPIO-Eingangsignale nicht richtig aufgearbeitet werden. Im Datenblatt
und im technischen Referenzhandbuch ist kein "hysteres" zu finden.
Ein Grund mehr für mich, sich nicht mit diesen Teilen anzufreunden.
Mi N. schrieb:> Fazit für mich: die ESP geben ein schlechtes Bild ab
Ja, in vielerlei Hinsicht tun sie das, das Verhalten der GPIOs ist nur
ein Aspekt. Mich stören andere viel mehr als dies.
Aber sie sind halt billich und haben WiFi/BT gleich dabei. Das macht sie
für viel Anwendungen dann halt doch hinreichend attraktiv.
Mi N. schrieb:> Wenn in den Datenblättern eine Eingangshysterese> nicht explizit erwähnt ist, würde ich trotzdem vermuten, das eine> vorhanden ist. Ein linearer Betrieb von digitalen Schaltungen ist sicher> nicht gewünscht.
Warum sollte ein nicht linearer Betrieb von digitalen Schaltungen eine
Eingangshysterese implizieren?
Das eine hat mit dem anderen doch nichts zu tun. Solange du eine
digitale Schaltung mit digitalen Signalen ausreichender Flankensteilheit
ansteuerst, geht es auch ohne Schmitt-Trigger.
Mi N. schrieb:> Ein Grund mehr für mich, sich nicht mit diesen Teilen anzufreunden.
Das verlangt auch keiner von dir ;-)
Mi N. schrieb:> Fazit für mich: die ESP geben ein schlechtes Bild ab, da ja wohl alle> GPIO-Eingangsignale nicht richtig aufgearbeitet werden.
Die Eingangssignale werden schon richtig aufgearbeitet. Wie Rainer
bereits schrieb, wird halt erwartet, dass an den DIGITALeingängen
entsprechend ihrer Bestimmung DIGITAL- und nicht beliebige ANALOGsignale
anliegen. Dazu gehört insbesondere eine hinreichende Flankensteilheit.
Auch ich bin nicht der allergrößte Fan der ESPs, aber damit hatte ich
noch nie irgendwelche Probleme.
Man findet im Netz Tausende zuverlässig funktionierender Schaltungen mit
ESPs. Ganz so schlimm kann die fehlende Eingangshysterese also nicht
sein. Probleme haben allenfalls diejenigen, die entgegen aller guten
Ratschläge mechanische Drehgeber mittels Flankeninterrupts auswerten
wollen, dabei feststellen, dass sie dies nicht zuverlässig hinbekommen,
und dann zu Work-Arounds wie externen RC-Filtern zurückgreifen ...
... womit wir wieder beim Thread-Thema angelangt wären :)
Yalu X. schrieb:> und dann zu Work-Arounds wie externen RC-Filtern zurückgreifen ...
Immerhin funktioniert der Workaround. Der Handwerker sagt: Nichts hält
länger als ein funktionierendes Provisorium.
Als Softwerker dichte ich den Spruch so um: Gehe niemals davon aus, daß
dein Provisorium bald abgelöst wird.
Nemopuk schrieb:> Yalu X. schrieb:>> und dann zu Work-Arounds wie externen RC-Filtern zurückgreifen ...>> Immerhin funktioniert der Workaround.
Korrekt funktioniert es nur, solange der daraus resultieren langsamen
Flanke keine Störungen überlagert sind, die zu Klingeln in der Nähe der
Schwelle führen. Nur mit einer Hysterese, die größer als die
Störsignalamplitude ist, kannst du das verhindern.
Oder die Flanke muss eben so schnell sein, das der Frequenzgang der
GPIO-Signalkonditionierung verhindert, dass Störungen auf der Flanke am
GPIO Input so stark verstärkt werden, dass sie als digitale
Zustandänderung weitergeleitet werden.
Yalu X. schrieb:> Man findet im Netz Tausende zuverlässig funktionierender Schaltungen mit> ESPs. Ganz so schlimm kann die fehlende Eingangshysterese also nicht> sein.
Was man im Netz so findet, ist für einige die Erfüllung und für andere
nur grauenhaft. Beim RP2040 ist das richtig gut gelöst, sich die
Eingangspins nach Bedarf konfigurieren zu können, und selbst mit
eingeschalteter Hysterese ist der Kaufpreis nicht höher.
Schön sind dann zum Beispiel die STM32: MIT Hysterese und
Quadraturdekodern.
Ich könnte jetzt noch einige Kommentare schreiben, was bekanntlich aber
sowieso nicht fruchtet. Was mir immer wieder auffällt, daß die
Polling-Fraktion wohl nie mit Interrupts gearbeitet hat und auf alles
schimpft, was sie nicht kennt: "Das machen wir immer so!"
Damit diese Leute nicht völlig an ihrer Engstirnigkeit verzagen müssen,
gibt es hier zur Kompensation das 'Bewertungssystem'.
;-)
Mi N. schrieb:> Was mir immer wieder auffällt, daß die Polling-Fraktion wohl nie mit> Interrupts gearbeitet hat und auf alles schimpft, was sie nicht kennt:> "Das machen wir immer so!"
Nun, es ist halt schön, ein Auswerteverfahren zu haben, das auf jedem
Mikrocontrollertyp (auch ohne Schmitt-Trigger) zuverlässig funktioniert
und ohne externe RC-Glieder auskommt. Warum sollte man sich das Leben
unnötig schwer machen und ein anderes Verfahren einsetzen, das diese
beiden Vorteile nicht hat?
Wenn der Mikrocontroller einen hardwaremäßigem Quadraturdecoder/-zähler
hat, ist das natürlich eine feine Sache. Der arbeitet übrigens exakt so,
wie die softwaremäßige Pollingmethode, nur sehr viel schneller.
Dass das mit der Flankenauswertung nicht zuverlässig funktioniert, haben
schon die Entwickler der legendären Quadraturdecoder/-zähler-ICs
HCTL-20xx von HP/Agilent/Avago erkannt. Auch diese ICs tasten das A- und
B-Signal periodisch ab, was daran zu erkennen ist, dass sie einen
externen Takt benötigen. Ich habe mich damals zunächst selber gefragt,
warum die das so kompliziert machen und nicht einfach die Signalflanken
direkt auswerten, so dass kein externer Takt erforderlich wäre. Recht
bald wurde mir aber klar, dass die Entwickler dies nicht aus Dummheit
taten ;-)
Yalu X. schrieb:> Dass das mit der Flankenauswertung nicht zuverlässig funktioniert, haben> schon die Entwickler der legendären Quadraturdecoder/-zähler-ICs> HCTL-20xx von HP/Agilent/Avago erkannt. Auch diese ICs tasten das A- und> B-Signal periodisch ab, was daran zu erkennen ist, dass sie einen> externen Takt benötigen.
Wenn Du es brauchst, von LS2000 bis THCT12024 habe ich noch einige Teile
vorrätig. Vergiss bei mechanischen Gebern nicht, RC-Glieder vor die
Eingänge zu setzen ;-)
Bei dem weiter oben von mir verlinkten Projekt/Programm kann man den
ATmega übrigens im Interruptmodus oder mit 400 kHz periodischer Abfrage
betreiben.
Nur so, falls es von Interesse sein sollte.
Nochmal auf die Hardware Quadraturdekoder zu kommen: die gibt es kaum
noch oder teuer zu beschaffen. Als Alternative kann man jedoch den guten
RP2040 verwenden: Abtastrate von ganz schnell bis ganz langsam, bis zu
vier Kanäle mit Index-Eingang und mit Arduino IDE auf eigene Bedürfnisse
anpassbar:
http://mino-elektronik.de/mt12_iic/mt12_iic.htm#qcnt_pico
Nur so, falls es von Interesse sein sollte ;-)
@Yalu
> Vergiss bei mechanischen Gebern nicht, RC-Glieder vor die> Eingänge zu setzen ;-)
bevor Du nachfragst, will ich das noch einmal erläutern.
Es ist eine praktische Erfahrung, daß mechanische Geber an schnellen
Dekodern Fehlzählungen erzeugen. Meine Vermutung dabei ist, daß ein
Prellen selten aber gleichzeitig auf beiden Kanälen stattfindet, was als
schneller Schritt ausgewertet wird. Ein kleiner Tiefpass kann das
unterdücken.
Tastet man mit >= 1 MHz ab, hat man eine hohe Wahrscheinlichkeit, diese
Störung zu erwischen. Bei 100 Hz ist allein schon rein rechnerisch die
Wahrscheinlichkeit deutlich niedriger und sofern der Drehgeber nur eine
relative Bewegung wiedergeben soll, fällt das auch garnicht auf.
Quadratursignale von optischen oder magnetischen Gebern haben in der
Regel eine nahezu 90° Phasenlage zwischen den Kanälen, weshalb hier die
Dekoder nicht 'überumpelt' werden.
Mi N. schrieb:> Was mir immer wieder auffällt, daß die> Polling-Fraktion wohl nie mit Interrupts gearbeitet hat
Stimmt ja gar nicht. Als ich es noch nicht besser wusste, habe ich auf
dem alten 8051 auch mit INT gewurschtelt und mich gefreut, das es mit
einem nagelneuen Encoder gut funktionierte. Aber als der Encoder in die
Jahre kam in der Bassanlage, wurde das immer mehr ein Geduldsspiel. Der
8051 ist nun Geschichte und ich bin froh, das es eine Plug-In Variante
mit Timer gibt, die auf so gut wie alle MC zu portieren ist und selbst
mit alten Encodern gut funktioniert.
Muss das mal auf Micropython übertragen...
@Mi N.
Finde den Fehler!
Mi N. schrieb:> Tastet man mit >= 1 MHz ab, hat man eine hohe Wahrscheinlichkeit, diese> Störung zu erwischen. Bei 100 Hz ist allein schon rein rechnerisch die> Wahrscheinlichkeit deutlich niedriger und sofern der Drehgeber nur eine> relative Bewegung wiedergeben soll, fällt das auch garnicht auf.
Oder warum machen "wir" den deiner Meinung nach, den ganzen "Straggle"
mit dem Polling? Was ist "unsere" größte Motivation, dies zu tun?
@Yalu X.
Und dabei heist es doch immer "Dummheit tut nicht weh". :=)
Matthias S. schrieb:> Mi N. schrieb:>> Was mir immer wieder auffällt, daß die>> Polling-Fraktion wohl nie mit Interrupts gearbeitet hat>> Stimmt ja gar nicht.
Ich weiß jetzt nicht, warum gerade Du Dich angesprochen fühlst. Soweit
ich Deine Beiträge kenne, machst Du das, was sinnvoll ist, und weißt
auch, wie es jenseits vom Tellerrand aussieht.
Teo D. schrieb:> Oder warum machen "wir" den deiner Meinung nach, den ganzen "Straggle"> mit dem Polling? Was ist "unsere" größte Motivation, dies zu tun?
Weiß ich nicht, ich hatte Yalu angesprochen. Um die eigentlicche
Fragestellung geht es doch schon lange nicht mehr.
Moin,
Mir kommt es etwas auffällig vor, daß Peter D. Vorschläge und Beispiele
hier nicht erwähnt werden. Ohne auf diesen Faden einzugehen, sind meine
Erfahrungen mit Peters Design immer extrem gut gewesen und lassen für
meine Zwecke keine Wünsche offen. Meist aus einer 1ms Timer ISR
operierend funktioniert es absolut zuverlässig. Ich habe sein Konzept
bis jetzt mit guten Erfolg auf PIC, AVR/Arduino, 8051, MSP430, Zilog
Encore! und früher einmal auf STM32F103 getestet. Auch Multikanal ist
möglich. Sein Konzept ist auch sehr Ressourcen schonend. Was mich
betrifft, brauche ich nicht mehr über den Zaun schauen.
Gerhard
Gerhard O. schrieb:> Moin,>> Mir kommt es etwas auffällig vor, daß Peter D. Vorschläge und Beispiele> hier nicht erwähnt werden.
Hallo Gerhard,
ich hatte es versucht. Diese Argumente verhallen jedoch schnell.
Beitrag "Re: Handbetriebenen Drehgeber ohne Timer auswerten"
Es wird lieber ein RC Glied empfohlen, welches bei immer mehr
ausgeleierten Kontakt wirkungslos wird, statt es richtig zu machen. Im
Gegenteil, 1MHz Abtastung und RC Glied passt so überhaupt nicht
zusammen. Zu viele Widersprüche in sich, jedoch wird auf denen beharrt.
Statt mit Argumenten zu kommen, kommen dann allgemeine Sprüche, dass
alle anderen blöd sind. Was will man dazu noch sagen.
Egal was hier einige schreiben oder denken. Die beste Methode ist eine
zyklische Zustandsabfrage, wie es Peter D. macht. Ob das Zyklische
mittels Timer Interrupt oder Polling gelöst wird, spielt keine Rolle,
solang die Abtastrate passt.
Wenn man dagegen auf Pin Interrupts reagiert, wundert mich es nicht das
es Horror wird und dann mit RC Glied als Nicht-Dauerlösung ausgewichen
wird. Man muss nur den Unterschied verstehen wollen und sich vor Augen
führen, was in beiden Varianten passiert und den Unterschied macht.
Veit D. schrieb:> Ob das Zyklische> mittels Timer Interrupt oder Polling gelöst wird
Nicht "oder", "und" ist hier der Fall.
Ja, Man(n) könnte auch ohne Timer... Frickeln bis der Arzt kommt aber
wer will das schon.
Teo D. schrieb:> Veit D. schrieb:>> Ob das Zyklische>> mittels Timer Interrupt oder Polling gelöst wird>> Nicht "oder", "und" ist hier der Fall.
Okay, ja, hast Recht.
Gerhard O. schrieb:> Mir kommt es etwas auffällig vor, daß Peter D. Vorschläge und Beispiele> hier nicht erwähnt werden.
Ja, das hat mir in diesem Standard-Troll-Thread auch irgendwie noch
gefehlt.
Mi N. schrieb:> Was mir immer wieder auffällt, daß die Polling-Fraktion wohl nie mit> Interrupts gearbeitet hat und auf alles schimpft, was sie nicht kennt:> "Das machen wir immer so!"
Im Gegenteil.
Die Leute haben aus ihren Fehlern gelernt.
Du hast noch nichts gelernt (und weigerst dich dazuzulernen weil du dich
ja schon für ein allwissendes Genie hältst).
Mi N. schrieb:> Es ist eine praktische Erfahrung, daß mechanische Geber an schnellen> Dekodern Fehlzählungen erzeugen. Meine Vermutung dabei ist, daß ein> Prellen selten aber gleichzeitig auf beiden Kanälen stattfindet, was als> schneller Schritt ausgewertet wird. Ein kleiner Tiefpass kann das> unterdücken.> Tastet man mit >= 1 MHz ab, hat man eine hohe Wahrscheinlichkeit, diese> Störung zu erwischen. Bei 100 Hz ist allein schon rein rechnerisch die> Wahrscheinlichkeit deutlich niedriger und sofern der Drehgeber nur eine> relative Bewegung wiedergeben soll, fällt das auch garnicht auf.
Vernünftiger Programmcode wie
https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.29
hat keinerlei Probleme, ob er mit 1ksps oder 1Msps abtastet und ob der
Encoder prellt oder nicht.
Teo D. schrieb:> Und um was geht es dir dann?
Recht zu haben, egal wie falsch er liegt.
Gerhard O. schrieb:> Mir kommt es etwas auffällig vor, daß Peter D. Vorschläge und Beispiele> hier nicht erwähnt werden. Ohne auf diesen Faden einzugehen, sind meine> Erfahrungen mit Peters Design immer extrem gut gewesen und lassen für> meine Zwecke keine Wünsche offen. Meist aus einer 1ms Timer ISR> operierend funktioniert es absolut zuverlässig.
me too
wobei nicht erwähnt?
Beitrag "Re: Handbetriebenen Drehgeber ohne Timer auswerten"
Mi N. schrieb:> Ich weiß jetzt nicht, warum gerade Du Dich angesprochen fühlst.
Weil es sich bei deiner Aussage um eine Verallgemeinerung handelt, die
eben nicht zutrifft.
Mi N. schrieb:> Tastet man mit >= 1 MHz ab, hat man eine hohe Wahrscheinlichkeit, diese> Störung zu erwischen.
Ja, und dann? Dann zählt der einfach um 1 weiter und gleich danach
wieder zurück.
> Quadratursignale von optischen oder magnetischen Gebern haben in der> Regel eine nahezu 90° Phasenlage zwischen den Kanälen, weshalb hier die> Dekoder nicht 'überumpelt' werden.
Störungen haben die unangenehme Eigenschaft, sich nicht an Phasen zu
halten.
Mi N. schrieb:> daß die Polling-Fraktion wohl nie mit Interrupts gearbeitet hat und auf> alles schimpft, was sie nicht kennt
Man sollte seine Werkzeuge kennen. Und Interrupts sind keine Werkzeuge
zum einlesen quasianaloger und per Definition gestörter Signale.
Bestenfalls zum Aufwecken aus dem Sleepmode taugen sie, denn da macht es
nichts aus, wenn sie 1 oder 20 mal schnell hintereinander das Aufwachen
antriggern.
Mi N. schrieb:> Was mir immer wieder auffällt, daß die> Polling-Fraktion wohl nie mit Interrupts gearbeitet hat und auf alles> schimpft, was sie nicht kennt:
Normalerweise gibt es 4 Stufen:
* Neuling: While-Schleife in main und alles nacheinander. Geht nur mit
einer Aufgabe (sowas wie Tasten auswerten und dann ein LED-Muster
weiterschalten).
* Anfänger: Interrupts. Quasi statt RTOS.
* Allwissend: RTOS und Interrupts. Aber "Erdstrahlen" aka Race
Conditions
* Erfahren: Zyklisch (aka SPS-Loop, aka Timerinterrupt). Und weil man
den Rest kennt, nutzt man ihn da, wo er sinnvoll ist. Aber aus 20 Tasks
werden 2 oder 3. Und Tasten oder Drehgeber nur selten mit Interrupts)
Wir hatten einen sehr guten SW-Entwickler, PC und embedded, der SPS
tatsächlich erst nach 20 Jahren verstanden hat.
Bruno V. schrieb:> Normalerweise gibt es 4 Stufen:> * Neuling: While-Schleife in main und alles nacheinander. Geht nur mit> einer Aufgabe (sowas wie Tasten auswerten und dann ein LED-Muster> weiterschalten).
Wenn man die Aufgabe damit zufriedenstellend erledigen kann, spricht
nichts dagegen.
> * Anfänger: Interrupts. Quasi statt RTOS.
Wenn man die Aufgabe damit zufriedenstellend erledigen kann, spricht
nichts dagegen.
> * Allwissend: RTOS und Interrupts. Aber "Erdstrahlen" aka Race> Conditions
Wenn man die Aufgabe damit zufriedenstellend erledigen kann, spricht
nichts dagegen.
> * Erfahren: Zyklisch (aka SPS-Loop, aka Timerinterrupt).
Wenn man die Aufgabe damit zufriedenstellend erledigen kann, spricht
nichts dagegen.
Zu guter Letzt:
* Könner: Wer die gegebene Aufgabenstellung beurteilt und den passenden
Lösungsansatz nutzt.
Lothar M. schrieb:> Mi N. schrieb:>> Tastet man mit >= 1 MHz ab, hat man eine hohe Wahrscheinlichkeit, diese>> Störung zu erwischen.> Ja, und dann? Dann zählt der einfach um 1 weiter und gleich danach> wieder zurück.
Eben leider nicht!
Da zappelt es, früher oder später, wie wild auf allen Kanälen wild
rum. Man muss einen ruhigen Moment erwischen, um das sicher zu erfassen.
Teo D. schrieb:> Eben leider nicht!> Da zappelt es, früher oder später, wie wild auf allen Kanälen wild> rum. Man muss einen ruhigen Moment erwischen, um das sicher zu erfassen.
Es ist ja ein "Grey-Code", der Wert schwankt z.B. zwischen 123456/4 oder
123455/4. Natürlich kann man argumentieren, dass der angezeigte Wert
irgendwann zwischen 999 und 1000 hin und her schwankt, was übel wäre. Es
hindert Dich aber niemand daran, eine Hysterese von 2 oder 3
Viertelschritten einzubauen. So wie bei jedem anderen Digitalwert auch.
Bruno V. schrieb:> Es ist ja ein "Grey-Code", der Wert schwankt z.B. zwischen
Ja dann mach hinne und mach deine eigenen Erfahrungen. Evtl. lernst du
ja, das der Zufall, recht gut mit dem Grey-Code zurecht kommt. :)
Es ist ja nicht so, da ich nicht auch mal auf deinem Standpunkt war. Ich
hatte wahrscheinlich nur viel Glück, durch einen recht üblen Alps
Encoder, das in ~2-3 Wochen lernen zu dürfen... Den benutze ich heute
noch bei der Entwicklung von SW!
Teo D. schrieb:> Ja dann mach hinne und mach deine eigenen Erfahrungen. Evtl. lernst du> ja, das der Zufall, recht gut mit dem Grey-Code zurecht kommt. :)
Wo siehst Du denn ein Problem? Wie viele hier schon sagten, der
polling-Ansatz funktioniert fehlerfrei und tadellos (solange pro
Viertelschritt abgetastet wird).
Wenn der Drehgeber über den kompletten Schritt prellt, geht es auch mit
Vodoo nicht.
Joachim B. schrieb:>>> Viertelschritt abgetastet wird>>>> Wie meinst du das und wie macht man das?>> https://www.mikrocontroller.net/articles/Drehgeber
Wo ist da die rede von "Viertel-Schritte abtasten"!?
Ich seh nur viel Theorie und Diagramme, mit einer schonen Null-Line...
Fast wie gezeichnet.
Hallo,
die üblichen Handdrehencoder erzeugen von Rastung zu Rastung 4
Phasenwechsel. Die muss man nicht alle letztlich auswerten, sonst zählt
es immer um 4 weiter von Rastung zu Rastung. Das wird er meinen mit
Viertelschritte - je Rastung.
Bevor Missverständnisse auftreten. Die Software detektiert und
verarbeitet schon alle Phasenwechsel, dass Ergbniss wird jedoch je nach
Encodertyp korrigiert, sodass man pro Rastung wieder nur +/- 1 hat.
Siehe Thread von Uwe K. in
Beitrag "Re: Drehgeber/Encoder 1-, 2- oder 4-schrittig", der
noch eine Detailverbesserung vorgenommen hat.
Um das allerletzte Wackeln auf Rastung komplett zu eleminieren, müssten
die Handdrehencoder mechanisch präziser gefertigt werden. Dann sind sie
nicht mehr billig. Die "eine wacklige" Phasenänderung darf dabei nicht
auf den Rastpositionen liegen, sondern muss davor oder danach sein. Das
sollte man den Herstellern vielleicht einmal sagen. :-)
Frohe Weihnachten.
Veit D. schrieb:> Das wird er meinen mit Viertelschritte - je Rastung.
Ja. Einen vollen Zyklus AB=00, 01, 10, 11.
Die Abtastrate muss so schnell sein, dass jeder Viertelschritt einmal
erkannt werden kann, egal wie viel Gezappel oder Prellen im Übergang
passiert. Bei z.B. max. 400 Viertelschritten pro Sekunde (=2.5ms) reicht
der 1ms-SysTicker zum Pollen.
Prellen und "Zappeln" muss man unterscheiden: Ein Kanal darf beim Drehen
beim Übergang (01 oder 10) bis zu 1.5ms prellen, ohne dass es zu einer
Fehlzählung kommt.
"Zappeln" (im Stillstand "zwischen" zwei Positionen) darf er unendlich
lange, ohne dass es zu Fehlzählungen kommt. Man kann zwar eine Hysterese
einbauen, aber einfache (straight) runterprogrammierte SW zappelt dann
mit 25% Wahrscheinlichkeit. Das ist o.k., es zeigt (korrekt) an, dass
der Drehgeber genau auf der Grenze ist. So, wie ein AD genau auf der
Grenze um 1LSB toggelt.
Frohe Weihnachten!
Mi N. schrieb:> Meine Vermutung dabei ist, daß ein Prellen selten aber gleichzeitig auf> beiden Kanälen stattfindet, was als schneller Schritt ausgewertet wird.
Gleichzeitiges Prellen auf beiden Kanälen bekommst du, wenn der
gemeinsame Kontakt wackelig ist.
Rainer W. schrieb:> Gleichzeitiges Prellen auf beiden Kanälen bekommst du, wenn der> gemeinsame Kontakt wackelig ist.
Der wesentliche Punkt ist: wenn beide Kanäle so sehr prellen, das sich
im Zyklus der Bewegung das Prellsignal der beiden Kanäle überlagert, ist
mit ABSOLUT keiner Methode mehr eine sinnvolle Abfrage möglich...
So einfach ist das eigentlich.
Und ja: auch Peter D's Code liefert dann nur noch sinnlosen Bullshit...
Jeder, der etwas anderes behauptet, ist ein Vollidiot, der die
Naturgesetze ignoriert.
Ob S. schrieb:> wenn beide Kanäle so sehr prellen, das sich im Zyklus der Bewegung das> Prellsignal der beiden Kanäle überlagert
Es ist, auch ohne jemanden als Vollidioten zu bezeichnen, noch viel
einfacher: wenn sich zwischen 2 Abtastungen beide Kanäle ändern, dann
ist die Drehrichtung nicht mehr bestimmbar. Und das ist der Fall, wenn
zum Kontaktprellen noch eine verschmutze Kontaktbahn hinzukommt. Oder
die Kontakte allein sind schon so verdreckt, dass nur noch beliebiger
Käse reinkommt.
Lothar M. schrieb:> Ob S. schrieb:>> wenn beide Kanäle so sehr prellen, das sich im Zyklus der Bewegung das>> Prellsignal der beiden Kanäle überlagert> Es ist, auch ohne jemanden als Vollidioten zu bezeichnen, noch viel> einfacher: wenn sich zwischen 2 Abtastungen beide Kanäle ändern, dann> ist die Drehrichtung nicht mehr bestimmbar. Und das ist der Fall, wenn> zum Kontaktprellen noch eine verschmutze Kontaktbahn hinzukommt. Oder> die Kontakte allein sind schon so verdreckt, dass nur noch beliebiger> Käse reinkommt.
Moin,
Irgendwie komme ich nicht mehr ganz mit. Anhand meiner Erfahrungen hatte
ich immer gute Ergebnisse mit mechanischen Hand-Drehgebern. Sollte sich
eventuell wirklich dauerhafte Unzuverlässigkeit einstellen, wechselt man
die Billig Dinger einfach aus. Wir sprechen hier doch selbstverständlich
von In-House Bauten und nicht Reparaturen von schwierig zu beschaffenden
speziellen Drehgebern kommerzieller Gerätschaften. Wenn bei mechanischen
DG manchmal selten ein Schritt nicht macht was er soll, dann lebt man
eben damit und das ist auch nicht weiter sehr störend.
Wer absolute Zuverlässigkeit braucht, soll eben optische QE wählen. Wer
absolut keinen Schritt verlieren möchte, sollte HW QE machen (LS7066
u.co., LS3183/4). Sich in solchen Fällen nur auf SW zu verlassen wollen
sehe ich da eher als sportliches Unterfangen an. Es gibt schliesslich uC
mit QE Eingängen der Zähler (STM32 z.B.)
Ironischerweise ärgert mich schon seit vielen Jahren der Drehgeber in
meinem HP33120A FG. Das Ding ist eine Krankheit.
Jedenfalls funktionieren mechanische DG in den meisten Fällen problemlos
genug. Wer sich selber DG Anwendungen bauen will, beschaffe sich halt
bessere Qualität dann geht es schon. Von der uC DG SW erwarten zu
wollen, daß sie mit dem Signal-Gewurschtel minderwertiger DG ohne Fehler
fertig werden sollen, empfinde ich als unrealistischen Unfug. Jede
Technik und SW hat ihre Grenzen. Wenn eine sauber entworfene
Auswertungs-SW dann versagt, beschaffe man sich gefälligst bessere HW.
RC-Filter und Beschwörungen gehen nur so weit.
Es nervt mich hier diese endlosen Auslassungen zu lessen, wenn doch
jeder wissen sollte was man vom Technikstandpunkt und Theorie- und
Lokikverhalten aus erwarten kann.
Schöne Weihnachten noch,
Gerhard
Hey all,
ich entschuldige mich bei der gesamten Gemeinde dafür, so kurz vor
Weihnachten so einen Thread ausgelöst zu haben. Das hier ist ein gutes
Forum, dass mir schon oft geholfen hat. Ich wollte wirklich keinen
Streit hervor rufen!
Das Projekt läuft schon erfolgreich, aber auf zwei gekoppelten 328Ps
(einfach wegen der Menge an Ports die ich brauche, diverse Taster,
Drehgeber und kaskadierte MAX7219-Displays), da hatte ich Timer im
Überfluss und konnte die Drehgeber-Abfrage sehr einfach bauen. Da ich
Spaß am Basteln habe, schreibe ich den Code neu (in C, war ursprünglich
Assembler) und multiplexe die Schalter und Taster, damit ich mit einem
328P auskomme. Und da ich 4 PWMs brauche (die ich nicht einfach
multiplexen kann) und der verbliebene Timer für 3 Zeitsteuerungen her
halten muss, wollte ich keine weitere Logik in die Interrupt-Routinen
einbauen.
Und ja, mit einem Raspberry Pi war das alles kein Problem, aber ich
fand, dass das mit weniger gehen muss. 7-Segment-Anzeigen machen mir
auch mehr Spaß als ein Touch Display.
Nach den Feiertagen werde ich mir den Thread in Ruhe durchlesen. Ich
vermute zwar, das ich mit meinem Lösungsansatz über die Runden komme,
aber Code zu vereinfachen ist immer schön. Und ein paar feine Gedanken
hab ich beim Überfliegen schon gesehen.
Also Danke nochmals für die konstruktiven Beiträge! Wenn ich was lernen
kann, ist der Ton Nebensache. Und da ich nicht das ganze Projekt
beschrieben habe, sind natürlich Fragen offen geblieben, dafür
entschuldige ich mich!
Wolfgang schrieb:> Und da ich 4 PWMs brauche (die ich nicht einfach> multiplexen kann)
Aber einer der PWM Timer kann doch problemlos die Drehgeber mitbedienen.
Die PWM Erzeugung kostet ja keinerlei Rechenzeit - höchstens
zwischendurch mal das Nachladen eines neuen PWM Wertes.
Matthias S. schrieb:> Aber einer der PWM Timer kann doch problemlos die Drehgeber mitbedienen.
Hm. Ich gebe zu, dass ich das Datenblatt des 328p anders verstanden
habe, sprich die PWM den Timer exklusiv in Beschlag nimmt. Danke für die
Anregung, ich schau mir das nochmal genauer an.
Wolfgang schrieb:> sprich die PWM den Timer exklusiv in Beschlag nimmt.
Nö, tut sie nicht. Du kannst Interrupts bei beiden OCR Events auslösen,
musst du aber nicht. Weiterhin gibts immer noch den OVF Interrupt.
Die PWM Erzeugung selber läuft in Hardware und beansprucht keine
Rechenzeit.
Wolfgang schrieb:> Ich gebe zu, dass ich das Datenblatt des 328p anders verstanden> habe, sprich die PWM den Timer exklusiv in Beschlag nimmt.
Was meinst du damit?
Wenn der Timer läuft und dabei ein PWM-Signal erzeugt, kann er durchaus
nebenbei noch einen Interrupt zum Auslesen von Drehgebern auslösen.
Einzige Einschränkung ist, dass die Auslesefrequenz nicht höher als die
PWM-Frequenz sein kann.
Rainer W. schrieb:> Einzige Einschränkung ist, dass die Auslesefrequenz nicht höher als die> PWM-Frequenz sein kann.
Doppelte PWM Frequenz sitzt drin, da eben min 2 Kanäle pro Timer.
Arduino F. schrieb:> Doppelte PWM Frequenz sitzt drin, da eben min 2 Kanäle pro Timer.
Allerdings ist das Timing dann nicht mehr konstant, weil die OCR
Interrupts kommen, wenn die Flanke des PWM passiert und das ist ja
variabel.
Also besser den OVF benutzen, der kommt immer gleich schnell.
Matthias S. schrieb:> Allerdings ist das Timing dann nicht mehr konstant, weil die OCR> Interrupts kommen, wenn die Flanke des PWM passiert
Nein, da es 2 OCR gibt und nur einer davon hoffentlich für 1 PWM Kanal
benötigt wird kann man den zweiten auf 50% stellen.
Wolfgang schrieb:> Hm. Ich gebe zu, dass ich das Datenblatt des 328p anders verstanden> habe, sprich die PWM den Timer exklusiv in Beschlag nimmt.
Beim ATmega328 kann jeder einzelne IO-Pin bei +/- Flankenwechseln einen
Interrupt auslösen. Dafür braucht man garkeine Timer.
Wenn man in diesem Forum Fragen zum Schutz von Eingängen stellt, werden
typischerweise Schaltungen gezeigt, die nur so mit
Widerständen/Kondensatoren/Schutzdioden bestückt sind. ADC-Vref muss
unbedingt per Drossel und weiteren Kondensatoren gefiltert werden, auch
wenn es für die popeligen 10 Bit völlig egal ist.
Aber, wenn mechanische Schalter/Taster kein sauberes Signal liefern darf
auf keinen Fall ein RC-Glied verwendet werden. Das muß gefälligst per
Software ausgefiltert werden. Vermutlich müssen auch ESD-Impulse an den
Eingängen per Software geschützt werden.
Wie doof ist das denn alles?
Wie es die Zeit mit sich bringt, ist auch ein Weihnachtswunder
geschehen. Aus:
Lothar M. schrieb:>> Tastet man mit >= 1 MHz ab, hat man eine hohe Wahrscheinlichkeit, diese>> Störung zu erwischen.> Ja, und dann? Dann zählt der einfach um 1 weiter und gleich danach> wieder zurück.
Wurde dann:
Lothar M. schrieb:> Es ist, auch ohne jemanden als Vollidioten zu bezeichnen, noch viel> einfacher: wenn sich zwischen 2 Abtastungen beide Kanäle ändern, dann> ist die Drehrichtung nicht mehr bestimmbar.
Ein Fachmann, zwei Meinungen ;-)
Michael B. schrieb:> Nein, da es 2 OCR gibt und nur einer davon hoffentlich für 1 PWM Kanal> benötigt wird kann man den zweiten auf 50% stellen.
Der TE benutzt 4 PWM Kanäle mit 2 Timern, woraus ich folgere, das er
zwei PWM Kanäle per Timer benutzt.
Wolfgang schrieb:> Und da ich 4 PWMs brauche (die ich nicht einfach> multiplexen kann) und der verbliebene Timer für 3 Zeitsteuerungen her> halten muss
Mi N. schrieb:> Wie doof ist das denn alles?
Nicht alles, was du nicht verstehst, ist doof.
Mi N. schrieb:> Fragen zum Schutz von EingängenMi N. schrieb:> ESD-Impulse an den Eingängen [per Software] geschützt werden.
Ein Ahnungsloser, zwei Irrtümer :-(
Kluge Leute sagen: man macht das, was man mit Software machen kann, in
Software und verwendet Hardware nur für das, was eben nicht in Software
geht.
Mi N. schrieb:> Aber, wenn mechanische Schalter/Taster kein sauberes Signal liefern darf> auf keinen Fall ein RC-Glied verwendet werden. Das muß gefälligst per> Software ausgefiltert werden. Vermutlich müssen auch ESD-Impulse an den> Eingängen per Software geschützt werden.> Wie doof ist das denn alles?
Ganz schön polemisch. Für wieviele ms willst denn das RC Glied auslegen?
Nur um dann später festzustellen, dass die "Entprellzeit" irgendwann
nicht ausreichend ist. Dir ist vermutlich noch immer nicht klar was eine
zyklische Zustandsabfrage im Unterschied zur Pin-Interruptabfrage ist.
Veit D. schrieb:> Dir ist vermutlich noch immer nicht klar was eine> zyklische Zustandsabfrage im Unterschied zur Pin-Interruptabfrage ist.
Was soll denn dieser Stuss?
Ich habe mehrere Beispielprogramme gezeigt, die mit verschiedenen
Verfahren arbeiten.
Nicht gelesen? Ja, das dachte ich mir.
Mi N. schrieb:> Wie es die Zeit mit sich bringt, ist auch ein Weihnachtswunder> geschehen. Aus:>> Lothar M. schrieb:>>> Tastet man mit >= 1 MHz ab, hat man eine hohe Wahrscheinlichkeit, diese>>> Störung zu erwischen.>> Ja, und dann? Dann zählt der einfach um 1 weiter und gleich danach>> wieder zurück.>> Wurde dann:>> Lothar M. schrieb:>> Es ist, auch ohne jemanden als Vollidioten zu bezeichnen, noch viel>> einfacher: wenn sich zwischen 2 Abtastungen beide Kanäle ändern, dann>> ist die Drehrichtung nicht mehr bestimmbar.>> Ein Fachmann, zwei Meinungen ;-)
Dein Beitrag, auf den sich Lothars erste Antwort bezog, war
missverständlich. Um es ganz klar zu sagen (mit t = Abtastzeit):
* der einfache Poll-Ansatz ist fehlerfrei, wenn nur ein Kanal prellt
und das Signal für mindestens t stabil ist (Viertelschritt-Zeit -
Prellzeit > t)
* Wenn beide Kanäle gleichzeitig prellen, wird es zur
Kaffeesatz-Leserei.
* Jede Auswertung muss individuell auf das Signal angepasst werden.
* Im einfachen Poll-Ansatz zeigt der Fehlerzähler (Anzahl der
Abtastungen mit 2 Flanken) das Ausmaß der Probleme. Das reicht meist
aus, da 99,99% der Zeit nix passiert, wenn die HW prinzipiell geeignet
ist.
von Bruno V. schrieb:
> * Wenn beide Kanäle gleichzeitig prellen, wird es zur>Kaffeesatz-Leserei.
Man könnte für diesen Fall einen Algorithmus programmieren,
der daß als ungültig erkennt und verwirft, also
dann gar nichts macht.
Die beste Entprellmethode die ich kenne und am liebsten
mag, ist wenn der Kontakt ein Umschaltekontakt ist und
damit ein RS-Flip-Flop angesteuert wird.
Die optisch Abtastung einer Sektorscheibe, wie zum Beispiel
bei einer Computermaus, finde ich auch noch gut, da gibt es
auch kein Prellen und keine Kontaktprobleme.
Ich weiß nicht ob es sowas auch bei Handbetriebene Drehgeber
gibt.
https://www.youtube.com/watch?v=-PN1uok52LU
Günter L. schrieb:> Man könnte für diesen Fall einen Algorithmus programmieren,> der daß als ungültig erkennt und verwirft, also> dann gar nichts macht.
Genau das ist ja der Fall. Es gibt bei jeder Abtastung (nach der
allerersten) genau 4 Fälle
* steht (beide Signale unverändert)
* links (ein Signal verändert)
* rechts (ein Signal verändert)
* Fehler (beide Signale verändert)
Prinzipiell kann beim Prellen alles passieren, auch 4 falsche "links"
ohne einen "Fehler". Ist aber sehr sehr unwahrscheinlich.
Die 90-Grad-Signale gibt es genau darum: Minimaler Aufwand (in Sender
und Empfänger, keine Entprellung erforderlich), maximale Sicherheit. Und
(ggf. mit HW-Entprellung) auch per Zähler oder sogar Up/Down-Zähler
auswertbar (1 Signal Richtung, das andere Zählflanke).
Naja, wer HW liebt, kann auch dies verwenden; ist aber nicht billig:
https://lsicsi.com/wp-content/uploads/2021/06/LS7183N_LS7184N.pdf
Ich bin zwar immer noch der Meinung, daß Peters Lösung für die Praxis
"die" perfekte Lösung darstellt. Wenn Peters Lösung mit der Zeit nicht
mehr funktionieren sollte, ist es eben an der Zeit den Drehgeber zu
entsorgen.
Falsche Sprünge habe ich noch nie beobachten können. Entweder es
funktioniert oder es tut sich gar nichts - Fehlerhaftes herumspringen
gibt es nicht. Für Frontplatten Drehgeber mehr als ausreichend.
Gerhard O. schrieb:> Ich bin zwar immer noch der Meinung, daß Peters Lösung für die Praxis> "die" perfekte Lösung darstellt.
Du meinst vermutlich Peter D (Danneger) hier
https://www.mikrocontroller.net/articles/Drehgeber#Solide_L%C3%B6sung:_Beispielcode_in_C
Der Code wurde zwar verlinkt und "Peter D" mehrfach erwähnt, aber quasi
nicht zusammen. (Darum mache ich das mal)
Der Code von Peter Danneger ist für mich in soweit schwierig (wie auch
seine meisterhafte Tastenentprellung), dass er jahrelange Erfahrung und
maximale Funktionalität in minimaler Weise komprimiert. Ein Anfänger
kann die Tricks und Kniffe nur verstehen, wenn er sie selbst prinzipiell
"erfahren" hat.
Bruno V. schrieb:> Gerhard O. schrieb:>> Ich bin zwar immer noch der Meinung, daß Peters Lösung für die Praxis>> "die" perfekte Lösung darstellt.>> Du meinst vermutlich Peter D (Danneger) hier> https://www.mikrocontroller.net/articles/Drehgeber#Solide_L%C3%B6sung:_Beispielcode_in_C>> Der Code wurde zwar verlinkt und "Peter D" mehrfach erwähnt, aber quasi> nicht zusammen. (Darum mache ich das mal)>> Der Code von Peter Danneger ist für mich in soweit schwierig (wie auch> seine meisterhafte Tastenentprellung), dass er jahrelange Erfahrung und> maximale Funktionalität in minimaler Weise komprimiert. Ein Anfänger> kann die Tricks und Kniffe nur verstehen, wenn er sie selbst prinzipiell> "erfahren" hat.
Genau. Der zeitliche Overhead in der Timer ISR ist minimal. Auch
Mehrfachkanal Operation funktioniert gut. Der Code ist insofern schwer
verständlich, weil man zeitlich multi-dimensional denken muß weil die
logischen Ergebnisse seiner Bearbeitung immer vomherigen Sample Punkt
abhängig und verknüpft sind. Linear lässt sich sein Code nicht intuitiv
verstehen bzw. lesen.
Bruno V. schrieb:> Ein Anfänger> kann die Tricks und Kniffe nur verstehen, wenn er sie selbst prinzipiell> "erfahren" hat.
Oder du wendest es einfach an.
Aber ich habe damals mit dem alten Simulator in AVR Studio 4 den Code
mal untersucht und es ist wie beim Märchen: "Ich sags dreimal und es ist
wahr". Viel mehr passiert da nicht. Und ja, nicht zweimal wie im Märchen
sondern eben dreimal. Der Code ist allerdings so gut dokumentiert und
mit Beispielen untermauert, das man ihn einfach verwenden kann. Das gilt
für die Entprellung genauso wie für den Drehgeber.
https://www.mikrocontroller.net/articles/Entprellunghttps://www.mikrocontroller.net/articles/Drehgeber
Arduino F. schrieb:> Dürfte für einige "nicht Arduino" User zu kompliziert sein.
Sie könnten es lernen.
Mi N. schrieb:> Beim ATmega328 kann jeder einzelne IO-Pin bei +/- Flankenwechseln einen> Interrupt auslösen. Dafür braucht man garkeine Timer.
Es ging genau um regelmäßige Abfrage der Pins, um Pin-Interrupts zu
vermeiden.
Rainer W. schrieb:> Es ging genau um regelmäßige Abfrage der Pins, um Pin-Interrupts zu> vermeiden.
Es gibt keinen Grund, PCINTs zu vermeiden!
Schon klar, Du gehst jede Minute ans Telefon, um zu hören, ob jemand
anruft.
Ich warte einfach, bis es klingelt ;-)
Mi N. schrieb:> Rainer W. schrieb:>> Es ging genau um regelmäßige Abfrage der Pins, um Pin-Interrupts zu>> vermeiden.>> Es gibt keinen Grund, PCINTs zu vermeiden!> Schon klar, Du gehst jede Minute ans Telefon, um zu hören, ob jemand> anruft.> Ich warte einfach, bis es klingelt ;-)
Du weißt das der Vergleich hinkt?
Du rennst bei jedem Spaßvogel zum Telefon.
Dir ist schon klar das es hier um mechanische Encoder geht?
Mi N. schrieb:> Es gibt keinen Grund, PCINTs zu vermeiden!
Das ist ganz einfach falsch. PCINT kann man gut verwenden wenn der Input
von Drehgebern mit Hall Sensoren o.ä. kommt. Bei allem was mechanisch
bedient wird ist Polling die weitaus bessere Methode, da sie absolut
berechenbar ist. Da gibt es in meinen Augen auch nichts zu diskutieren.
Über Zeitfaktoren brauchen wir hier nicht reden, das liegt immer im
unrelevanten Bereich. Und Blockieren tut da auch niemals etwas.
> Schon klar, Du gehst jede Minute ans Telefon, um zu hören, ob jemand> anruft.> Ich warte einfach, bis es klingelt ;-)
Das ist auch falsch. Die Hauptlast in jedem µC Programm wird meistens
durch eine main-Loop verursacht. Wir sind hier nicht auf einem PC. Um
bei deinem Vergleich zu bleiben. Du läust ständig im Kreis und lässt
dich von dem Stein überraschen den dir jemand ans Fenster wirft. Ich
drehe bei jeder hundersten Runde mal kurz den Kopf zur Tür um zu sehen
ob einer da ist.
Mich kann da nichts überraschen. Bei dir wird es kritisch wenn du gerade
in der Nase popelst und den Stein vor die Hand kriegst.
Es macht einen Unterschied ob ich alles stehen und fallen lasse und zum
Telefon hechte(Interrupt) oder es halt 10 Sekunden klingeln lasse und
fertig mache was ich angefangen habe(polling).
Wenn du regelmäßig SCAM-Anrufe bekommst die nur 1-2 Sekunden läuten
lassen, rennst du jedes mal los.
Mein Telefon klingelt auch in ner Sekunde noch. Du rennst sofort los.
Mi N. schrieb:> Ein Fachmann, zwei Meinungen ;-)
Eher selektivens Lesen. Denn eine Störung ist etwas anderes als eine bis
zur Unbrauchbarkeit verschlissen Kontaktbahn. Und beides zusammen ist
was anderes als das Prellen eines Kontaktes. Aber in allen drei Fällen
ist die Interrupt-Lösung weniger deterministisch.
Bei Contollern, deren Interruptstruktur etwas komplexer als die der
alten AVR mit ihrer einen blockierenden Interruptebene sind, kann die
vielfache, schnell aufeinanderfolgende Interruptgenerierung in beiden
Fällen zudem zu eigenartigen Stack- und Semaphorenproblemen führen.
Mi N. schrieb:> Herrlich dieser Kindergarten, einfach herrlich
Kann man nichts machen. In jeder Generation "Maker" gibts wieder welche,
die den komplizierten Standard-Code zur Drehgeber-Auswertung nicht
verstehen, sich aber für klüger halten als die ganzen alten Säcke, die
den verwenden oder gar in Hardware gegossen haben.
Die werfen dann einen Blick auf das idealisierte Phasen-Diagramm im
Datenblatt und kommen als Allererste auf die glorreiche Idee, dass man
ja auf A einen Flankeninterrupt legen kann, und auf B dann direkt
auslesen kann ob Hoch- oder Runtergezählt wird.
Dieser bahnbrechende und geniale Durchbruch wird dann auf Tiktok,
Youtube und µC.net verbreitet, und von dort leider auch zum Trainieren
von KI-Modellen verwendet.
Den einzelnen Kindergarten-Coder wird man nicht bekehren können, der
hält sich selber für den Einstein der Drehgeber-Auswertung.
Aber man kann ein wenig Kontra im Thread hinterlassen, damit der Müll
zumindest nicht unwidersprochen in den KI-Trainingsdaten landet.
Lothar M. schrieb:> Bei Contollern, deren Interruptstruktur etwas komplexer als die der> alten AVR mit ihrer einen blockierenden Interruptebene sind, kann die> vielfache, schnell aufeinanderfolgende Interruptgenerierung in beiden> Fällen zudem zu eigenartigen Stack- und Semaphorenproblemen führen.
Da ich kein Freund davon bin, mich diesem Verhalten 'auszuliefern', habe
ich kein Problem damit, die Bandbreite vor dem Eingang zu begrenzen.
Ferner bietet es sich an, die vorgefundenen Eingangspegel dem RC-Glied
am Eingang separat aufzuprägen, wodurch nachfolgende Pegeländerungen
wieder die volle Einschwingzeit benötigen.
Εrnst B. schrieb:> Aber man kann ein wenig Kontra im Thread hinterlassen, damit der Müll> zumindest nicht unwidersprochen in den KI-Trainingsdaten landet.
So isses!
Mi N. schrieb:> Es gibt keinen Grund, PCINTs zu vermeiden
Natürlich doch, die Vielzahl die bei prellen entsteht, davon einige so
schnell hintereinander dass sie verloren gehen werden weil der vorherige
noch nicht abgearbeitet ist. Aber das wirst du nie verstehen,
lernrenitent wie du bist. Stattdessen kommt dann externe Entprellung
über extra Bauteile.
Mi N. schrieb:> Es gibt keinen Grund, PCINTs zu vermeiden!
All die Nachteile, die ein Pin-Change-INT so mit sich bringt:
HW mäßige Aufbereitung der Signale nötig. Braucht Platz und kostet Geld.
Daher die Verwendung teuren Gebern, die nur auf einem Kanal klingeln
können oder welche die 4 Schritte pro Rastung ausgeben, nötig. Was auch
nur eine kläglicher HW Ersatz zur SW Entprellung darstellt (Nur wer bis
4 Zählt hat recht).
Die Voraussetzung eines Schmitt-Trigger am o. vor dem Eingang.
Zusätzliche Widerstände u. Kondensatoren.
Weitere Maßnahmen in SW. Ein vollkommener Mumpitz, der letztendlich
nichts anderes darstellt wie simples Pollen (Wird aber laut Aussage, ja
eh nicht benötigt).
Deine Vorteile von PinChange waren noch mal?
(Kommt nun wieder was mit "Strom sparen"?)
Mir wird aber nun immer klarer, warum es so gut wie keine Professionell
entwickelten Geräte, mit gut und lang funktionierenden Drehgebern gibt.
...
Das muss noch eine Tradition aus Zeiten sein, wo Controller noch Teuer
und langsam waren!?
Bewundernswert, wirklich bewundernswert ist die Hartnäckigkeit und
extreme Beratungsresistenz, die hier im Thread zum Vorschein kommt. Das
nimmt ernsthaft weltanschauliche Züge an.
Und dann werden noch zusätzliche Klimmzüge mit Zusatzbeschaltung
gemacht, nur um das eigene Glaubensmodell nicht in Frage stellen zu
müssen.
Beeindruckend! Weiter so! Elektronik mit Glauben statt Wissen, das
brauchen wir!
Gerhard O. schrieb:> Naja, wer HW liebt, kann auch dies verwenden; ist aber nicht billig:>> https://lsicsi.com/wp-content/uploads/2021/06/LS7183N_LS7184N.pdf
Leider habe ich keine Exemplare davon vorrätig, sonst würde ich sie
gerne mal auf Herz und Nieren testen ;-)
Diese ICs scheinen im Wesentlichen flankengetriggert zu arbeiten, was
sich darin zeigt, dass sie (anders als bspw. die HP-Typen) keinen
Takteingang haben.
Zwei Indizien sprechen dafür, dass deswegen auch sie Probleme mit
Kontaktprellen haben:
1. Zitat aus dem Datenblatt:
"The LS7183N and LS7184N are CMOS quadrature clock converters.
Quadrature clocks derived from optical or magnetic encoders, […]"
Von mechanischen Encodern ist hier (bewusst?) nicht die Rede.
2. Erst am Ende des Datenblatts, nämlich im Schaltungsvorschlag in
Figure 7, kommt ein mechanischer Encoder ins Spiel (RE11CT), und hier
sind (aus gutem Grund?) RC-Glieder vor die Eingänge A und B
geschaltet.
> Ich bin zwar immer noch der Meinung, daß Peters Lösung für die Praxis> "die" perfekte Lösung darstellt.
Die wirklich perfekte Lösung ist die Verwendung von Mikrocontrollern
mit Encoder-Auswertung in Hardware. Da dies mittlerweile selbst mit
Billigsttypen wie dem CH32V003 (<20ct) möglich ist, sind nicht einmal
mehr die Kosten ein Argument für eine Softwarelösung.
Ich hoffe, dass sich diese Erkenntnis trotz dem flankenunabhängigen
Abtastverfahren zukünftig auch bei der Flankenfraktion in den
Entwicklungsabteilungen durchsetzen wird, so dass Geräte mit
unzuverlässig arbeitenden Eingaberädern (über die auch ich mich immer
wieder ärgere) allmählich vom Markt verschwinden werden.
Yalu X. schrieb:> so dass Geräte mit> unzuverlässig arbeitenden Eingaberädern (über die auch ich mich immer> wieder ärgere) allmählich vom Markt verschwinden werden.
Da möchte ich mal meine Mikrowelle "lobend" erwähnen. Sie hat sich, über
die Jahre, zu dem nervigsten Gerät in meinem Umfeld entwickelt.
Wenn das in dem Maße so weiter geht ist sie in in ein paar Monaten
unbedienbar.
Kontaktspülungen helfen etwas/kurzfristig, sind aber arg lästig.
Yalu X. schrieb:> Die wirklich perfekte Lösung ist die Verwendung von Mikrocontrollern> mit Encoder-Auswertung in Hardware.
Vor Urzeiten hatte ich Hitachi H8/3003 und zuletzt H8S/2392 verwendet,
die wohl gleiche bzw. ähnliche Quadraturdekoder verwenden. Auch mit
neuen mechanischen Drehgebern gibt es Zählfehler.
Es hat mich gewundert, aber so sieht die Praxis aus.
Vielleicht probiert mal jemand einen STM32..., was ich mangels Bedarf
nicht mehr gemacht hatte, und berichtet, wie es damit aussieht.
Das Programm mit RP2040 und PIO-Dekoder liefert auch Zählfehler
(Abtastrate ca. 10 MHz) die verschwinden, wenn die Abtastrate reduziert
wird.
Gib Dir einen Ruck und schalte einen winzig kleinen TP vor die Eingänge.
Vielleicht mit Bauteilen 0201 und auf der Rückseite der Platine - das
sieht dann auch keiner und ich petze nicht ;-)
Mi N. schrieb:> Vor Urzeiten hatte ich Hitachi H8/3003 und zuletzt H8S/2392 verwendet,> die wohl gleiche bzw. ähnliche Quadraturdekoder verwenden. Auch mit> neuen mechanischen Drehgebern gibt es Zählfehler.
Um der Sache auf den Grund zu gehen und zu wissen, ob die Ursache im µC,
im Encoder oder in den dazwischenliegenden Signalleitungen lag und wie
du den ggf. vorgeschalteten Tiefpass dimensionieren musst, hast du
sicher die Encoder-Signale mit dem Oszi aufgenommen. Ich gehe mal davon
aus, dass du keine Screenshots mehr davon hast, aber vielleicht kannst
du die Signale noch aus dem Kopf heraus skizzieren?
Gab es (auf Grund von Kontaktproblemen) den Fall, dass Pegelwechsel auf
beiden Signalen gleichzeitig auftraten? Das würde das Fehlverhalten
erklären. Tiefpässe können das Problem dann zwar mindern, aber nicht
vollständig beseitigen. Bei einem relativ neuen Encoder sollte der Fall
aber nicht auftreten, da jeder Kontakt üblicherweise (wie auch bei einem
Schleifring) aus mehreren redundanten Kontaktzungen besteht, sodass
zwischen zwei Übergängen (nach Beendigung der Prellphase) der Kontakt
entweder zuverlässig offen oder zuverlässig geschlossen ist.
> Gib Dir einen Ruck und schalte einen winzig kleinen TP vor die Eingänge.
Könnte ich machen, aber ich könnte die positive Wirkung nicht erkennen,
weil ich bisher das Problem noch nie hatte und es zu Testzwecken auch
nicht ohne weiteres nachstellen kann. Falls es doch irgendwann einmal
auftreten sollte, würden dem Einsatz von Tiefpässen erst zwei andere
Schritte vorangehen:
1. Finden der Ursache (s.o.)
2. Beheben der Ursache
Erst wenn beides fehlschlägt und ich mit meinem Latein wirklich am Ende
bin, kommt
3. Bekämpfen der Symptome (bspw. durch Hinzufügen von Tiefpässen)
Moin,
Was hier in diesem Thread während dieser Erörterungen noch nicht
wirklich berücksichtigt worden ist, ist die Gesamtintegration von uC
Peripherie und Anwendung spezifische Betrachtungen. Das Folgende erhebt
den Anspruch, daß sporadische Unregelmässigkeiten im praktischen
Gebrauch des Drehgebers als Eingabe Element in Menu gestützten
Eingabeszenarien vernachlässigbar sind und Anomalien in der Regel
unbemerkt bleiben. Dies stützt sich, was mich betrifft, auf langjährige
Erfahrungen. Die Analysis in nur statisch linearer Progression führt zum
Übersehen des dynamischem Verhaltens als Ganzes einer Real World
Anwendung.
Abgesehen davon sind mechanische Drehgeber nur als manuelle Eingabe
Elemente vorgesehen und nicht zur absoluten fehlerfreien
Schrittverfolgung wo optische oder magnetische Drehgeber notwendig sind.
Bei mechanischen Drehgebern nimmt man seltene Eingabefehler schon von
vornherein in Kauf.
In praktischen Anwendungen wo Displayanzeige und Drehgeber vorkommen,
wird auch das Programskelett nicht unbeachtet bleiben müssen. In meinen
Anwendungen habe ich immer eine Zeitbasis 1ms Timer ISR am Laufen die
die Arbeitsablaufdynamik der Anwendung bestimmt. Diese ISR ist auch für
das Pollen der Drehgeber Signale verantwortlich. Die Zeitbasis bestimmt
wie oft HW bedient werden muß und viel Logik wird in Zustandsmaschinen
stetig anhand Logik abgearbeitet. Da die ISR ohnehin läuft, fallen die
paar us die der Poll Algorithm benötigt überhaupt nicht ins Gewicht und
sind ein Bonus.
Da das händische Drehen im Vergleich zum 1ms Pollen im Vergleich zur
regelmässigen ISR Timing sehr unregelmässig und gezogen vorkommt, gibt
es in der Zeitskala viele Poll Zustände wo sich die Datenlogik des
Encoders nicht ändert. Sollte nun hin und wieder Prellen vorkommen stört
das die Auswertelogik nur sporadisch. Da aber die Auswertelogik von
Peter nur gültige Datenzustandsprogressionen berücksichtigt, gehen die
sporadischen "Logikfehler" einfach als Einzel Event "Noise" unter und
ergeben eine Art zeitliche Redundanz. Da typische LCD Updates nicht im
ms Takt vorkommen, hat die ISR Poll Logik im Gesamtablauf der Anwendung
aus gesehen genug Zeit und Möglichkeit sporadische Einzelfehler zu
unterdrücken und der Bediener merkt in der Regel nichts davon, nicht
zuletzt, weil LCD und Daten Updates relativ zur Timer ISR eine gänzlich
andere Zeitskala haben.
Wenn man jetzt am Drehgeber dreht, folgen die angezeigten Werte schön
ruhig der Drehaktivität. Da der Bediener in der Regel einen bestimmten
Wert erhalten möchte dreht er eben bis er ihn am Display sieht. Ein
verlorener oder extra Schritt, stört da in der Praxis nicht unbedingt
auffällig und wird meist nicht einmal bemerkt.
Jedenfalls sind das meine (positiven) praktischen Erfahrungen. Da ich
nur Peter Ds Algorithm verwende, funktioniert das in der Praxis in
anscheinender Perfektion. In keinen meiner Projekte fielen Prellungen
fehlerhafter Drehgeber Performanz jemals praktisch negativ auf. In der
Praxis ist sein Ansatz ein sehr guter Kompromiss zwischen Performanz und
uC Belastung und Einfachheit. Am Ende zählt die praktische Eignung einer
Anwendung. Aber vielleicht sind meine guten Erfahrungen einfach nur auf
die Tatsache gestützt, daß ich meist nur Markenfabrikate, wie z.B
Grayhill verwende und von Firmen wie Digikey bezogen habe. Mit Produkten
von Ali habe ich keine Erfahrungen. Wer weiß...
Es gibt viele Möglichkeiten ein Problem zu lösen. Aber meist ist es ein
Tradeoff zwischen vielen Design Betrachtungen. Ich habe aufgehört über
den Zaun zu gucken und wähle Ansätze die erwiesenermassen einen guten
Track Record haben.
Gerhard
Yalu X. schrieb:> 3. Bekämpfen der Symptome (bspw. durch Hinzufügen von Tiefpässen)
Ich würde hier anfangen, nachdem ich mal einen Kanal eines wenig
benutzten Drehgebers mit einem Pullup-Widerstand versehen habe und mit
ein bisschen Drehen beispielsweise angefügtes Bild erhalte.
Mi N. schrieb:> Ich würde hier anfangen, nachdem ich mal einen Kanal eines wenig> benutzten Drehgebers mit einem Pullup-Widerstand versehen habe und mit> ein bisschen Drehen beispielsweise angefügtes Bild erhalte.
Auf dem Screenshot ist ein Zeitraum von 20 µs zu sehen. Wann kommt die
Flanke des zweiten Kanals? Wie sieht das Signal des ersten Kanals bis
dahin aus?
Mach doch mal einen Screenshot, auf dem man beide Kanäle sieht.
Teo D. schrieb:> Mi N. schrieb:>> Pullup-Widerstand>> Wie viele Ohms?
Es ist hilfreich die nicht-Gold Kontakte zwecks Selbstreinigung mit
zwischen 2-5mA zu bestromen. Speziell wenn die Kontakte nicht vergoldet
sind führt Kontaktstrom weit unter 1mA langfristig meist zu
Verschlechterungen und Tendenz zum übermässigen Prellens. Die internen
uC Pullups sind da nicht wirklich ausreichend. Behutsame Bemessung von
RC TP ist auch nützlich, um Mikro Prell-Transitionen etwas
abzuschwächen. Optimales Design kann holistischen Charakter annehmen.
Bei 3-5V rate ich Werte zwischen 1.5 bis 3.3K zu wählen.
https://grayhill.com/wp-content/uploads/media/25l-datasheet.pdf
Obwohl nicht explizit für 3-5V angegeben, werden dort 1.5mA als
Minimalwert angegeben. Andrerseits spricht gegen meinen Argumentation,
daß Grayhill die Kontaktflächen vergoldet. Aber kann man das bei
billigen Fernost Produkten auch annehmen? Da ist etwas mehr Kontaktstrom
eher günstig.
Es ist auf alle Fälle wichtig die jeweiligen Datenblätter zu
konsultieren und Markenfabrikate und zuverlässige Beziehungsquellen zu
bevorzugen und danach vorzugehen. Bei unbekannter Ware kann es
unliebsame Überraschungen geben. Ich verwende immer Markenfabrikate von
zuverlässigen Quellen bezogen und die Praxisergebnisse bei mir sprechen
für sich selbst. Potenziell grottige Drehgeber sollte man nach
Möglichkeit vermeiden.
Gerhard O. schrieb:> Das Folgende erhebt> den Anspruch, daß sporadische Unregelmässigkeiten im praktischen> Gebrauch des Drehgebers als Eingabe Element in Menu gestützten> Eingabeszenarien vernachlässigbar sind und Anomalien in der Regel> unbemerkt bleiben.
Benutzergeführte Anwendungen sind meistens unkritisch. Selbst Prellen
und damit "hängen" (durch zu viele Interrupts) ist nur unschön.
Es gibt aber auch Anwendungen als mechanischer Drehgeber, wo
Zuverlässigkeit wichtig ist (also im Bereich << 1 Fehler auf 10^6). Da
sind Bastelansätze (womöglich ohne Fehlererkennung) und austarierte
R-C-Glieder ein beliebter Quell von Erdstrahlen (als Synonym für Fehler,
die "keine systembedingte" Ursache haben).
Wolfgang schrieb:> Nach den Feiertagen werde ich mir den Thread in Ruhe durchlesen. Ich> vermute zwar, das ich mit meinem Lösungsansatz über die Runden komme,> aber Code zu vereinfachen ist immer schön. Und ein paar feine Gedanken> hab ich beim Überfliegen schon gesehen.
Na, da hat er ja dann einiges zu tun :-)
Guten Rutsch ...
Bruno V. schrieb:> Benutzergeführte Anwendungen sind meistens unkritisch. Selbst Prellen> und damit "hängen" (durch zu viele Interrupts) ist nur unschön.
Also ich finde es schon etwas störend, wenn Drehgeber wie
Zufallsgeneratoren arbeiten.
Das mag manch anderer offensichtlich anders empfinden aber ich spiele
dann doch lieber Tetris.
Bruno V. schrieb:>> Eingabeszenarien vernachlässigbar sind und Anomalien in der Regel>> unbemerkt bleiben.>> Benutzergeführte Anwendungen sind meistens unkritisch. Selbst Prellen> und damit "hängen" (durch zu viele Interrupts) ist nur unschön.
Dann hast du noch nie ein Gerät mit halbdefekten oder mies dekodiertem
Drehgeber bedient. Es ist die Seuche.
Moin,
Angespornt durch diese Fadenkette, reparierte ich heute nach vielen
Jahren den mechanischen Drehgeber des HP33120A. Das Abnehmen der
Frontplatte und der Leiterplatte war auch zum Fluchen anspornend. Naja,
nachdem ich mir den Drehgeber ansah, stand fest, ich werde versuchen
hineinzusehen, da man den Achsenteil nach vorsichtigen Aufbiegen der
vier Befestigungs-Laschen, ohne ihn auszulöten müssen, abnehmen kann.
Zuerst mit Alkohol gesäubert und danach mit einer prophylaktischen Dosis
Cramolin versehen, spielt er jetzt wieder wie neu und wird sich das
hoffentlich hinter die Ohren schreiben. Bin gespannt wie lange die Kur
anhalten wird. Über zwanzig Jahre erduldete ich aus Faulheit diese
Leidensgeschichte. Also macht es nicht so wie ich - Rangehen, öffnen,
repariert!
Man könnte in der fehlerkorrigierenden Software sogar berücksichtigen,
dass ein Wechsel der Drehrichtung nicht beliebig schnell möglich ist. So
könnte man z.B. 360 Grad pro Sekunde zulassen, aber Richtungswechsel
erst nach 50 ms Stllstand. Wenn ein schnellerer Richtungswechsel erkannt
wird, wird er korrigiert. Finden jedoch viele Impulse hintereinander in
die "andere" Richtung statt, sind sie doch plausibel und werden nicht
korrigiert.
Yalu X. schrieb:> Mach doch mal einen Screenshot, auf dem man beide Kanäle sieht.
In der gezeigten Kurve kann Flankenwechsel < 1 µs mit kritischen
Amplituden sehen, die wohl einen Hardwaredekoder (black box) außer Tritt
bringen können.
Um eine volle Periode des Gebers zu erfassen, bräuchte man einen
(motorischen) Antrieb mit gleichbleibender Drehzahl. Zeichne ich 10 s
auf, wird die Auflösung vermutlich zu schlecht.
Was ich beim Drehen sehe: bei langamen Drehen kann das gezeigte
'Bratzeln' des Signal auch 1 ms dauern; bei schnellem Drehen sind die
Flankenabstände >= 5 ms.
Insgesamt ein Signal, was problemlos auszuwerten ist, egal welches
Verfahren man anwendet. Wenn es - wie vom TO in der Überschrift
vorgegeben - ohne Timer sein soll, dann eben ohne Timer.
Nemopuk schrieb:> an könnte in der fehlerkorrigierenden Software sogar berücksichtigen,> dass ein Wechsel der Drehrichtung nicht beliebig schnell möglich ist.
Las dir den momentanen Zustand, je nach Abtastrate(!), einige male
bestätigen und du erschlägst auch dieses konstruierte Problem, einfach
mal so neben bei.
"Fehler korrigieren" würde ich das aber nicht nennen. Bei Fehler gehts
zurück auf Anfang.
Entprellen ist simpel, nur die Leute denken zu kompliziert!
Es ist nichts anderes als alle fünfe grade sein lasen und bis (zB) drei
zählen.
Mi N. schrieb:> beispielsweise angefügtes Bild
Und das steckst du in deinen Interrupt-Eingang der bei jeder Flanke
einen Interrupt auslöst.
Ob da Polling z.B. in main loop oder 1ms timer nicht klüger ist ?
Ein altes .ino-Programm für den 328 hatte ich noch gefunden und damit
die Signale am Drehgeber direkt (blau) und am Port-Pin (gelb)
aufgezeichnet. Dabei habe ich nach möglichst schlechten Schaltvörgängen
für das Öffen und Schliessen des Kontaktes eines Kanals gesucht. Die RC
Zeitkonstante beträgt 1 ms und alles ganz ohne Verwendung eines Timers.
Wer mit solchen sauberen Eingangssignalen nicht umgehen kann, soll
meinetwegen weiter jammern.
Das ist der Zeitpunkt, wo der Schmitttrigger am Eingang einen PCINT
auslöst und in der ISR der Eingangskondensator auf vollen '0' oder
'1'-Pegel gebracht wird. Das vergößert die Eingangshysterese und sorgt
dafür, daß für einen folgenden Pegelwechsel wieder >= 0,7 ms benötigt
werden, um einen neuen PCINT auszulösen.
Selbst bei hoher ISR-Auslastung durch andere Quellen wird der µC nicht
'überrannt'.
Mi N. schrieb:> Yalu X. schrieb:>> Mach doch mal einen Screenshot, auf dem man beide Kanäle sieht.>> In der gezeigten Kurve kann Flankenwechsel < 1 µs mit kritischen> Amplituden sehen, die wohl einen Hardwaredekoder (black box) außer Tritt> bringen können.
Wenn währenddessen der zweite Kanal einen konstanten Pegel (high oder
low) liefert, sollte dies kein Problem sein.
> Um eine volle Periode des Gebers zu erfassen, bräuchte man einen> (motorischen) Antrieb mit gleichbleibender Drehzahl. Zeichne ich 10 s> auf, wird die Auflösung vermutlich zu schlecht.
Mich würde nur interessieren, was der zweite Kanal macht, während der
erste umschaltet. Dazu reicht es, wenn die Zeitbasis des Oszis so
eingestellt ist, dass die komplette Prellphase des ersten Kanals
gerade noch erfasst wird. Das Umschalten des zweiten Kanals, das
natürlich sehr viel später stattfindet, muss nicht erfasst werden.
Bruno V. schrieb:> was passiert denn da bei µs 400 bzw. 0?Mi N. schrieb:> Das ist der Zeitpunkt, wo der Schmitttrigger am Eingang einen PCINT> auslöst und in der ISR der Eingangskondensator auf vollen '0' oder> '1'-Pegel gebracht wird.
D.h. du schaltest den Interrupt-Pin in der ISR auf Ausgang, so dass
dieser über den Kondensator kurzzeitig kurzgeschlossen wird. Ok, das
kann man so machen, aber so ganz die feine Englische ist das nicht ;-)
Mal ganz schnell gedreht.
Yalu X. schrieb:> D.h. du schaltest den Interrupt-Pin in der ISR auf Ausgang, so dass> dieser über den Kondensator kurzzeitig kurzgeschlossen wird. Ok, das> kann man so machen, aber so ganz die feine Englische ist das nicht ;-)
Erst darf man keinen Kondensator verwenden und dann darf man einen Pin
nicht zwischen Eingang und Ausgang umschalten?
Den Witz mußt Du mir erklären.
Mi N. schrieb:> Erst darf man keinen Kondensator verwenden
Man darf schon. Der Fehler liegt ja nicht im Kondensator (bzw.dem
RC-Glied), sondern im Festhalten an einem ungeeigneten Lösungsansatz
(der Encoderauswertung mittels Flankeninterrupts), der diesen
Kondensator überhaupt erst erforderlich macht.
> und dann darf man einen Pin nicht zwischen Eingang und Ausgang> umschalten?
Auch das darf man. Man sollte aber mit einem Ausgang nicht einen halb
geladenen Kondensator voll- oder entladen, denn das verstößt gegen den
im Datenblatt unter "Absolute Maximum Ratings" angegebenen Maximalstrom
per I/O-Pin von 40 mA. Tatsächlich fließen 70-80 mA. Das dieser Strom
nur kurzzeitig fließt, wird der AVR zwar nicht kaputtgehen, aber unschön
ist die Sache dennoch. So wird im Datenblatt nirgends garantiert, dass
sich der kurzzeitige Stromstoß nicht störend auf andere Komponenten des
µC auswirkt.
Interessant, zumal ich meine Schaltung garnicht gezeigt habe.
Und das alles ohne Timer funktioniert, könnte zwar möglich sein, scheint
aber doch ernorm zu stören :-(
Mi N. schrieb:> Interessant, zumal ich meine Schaltung garnicht gezeigt habe.
Dafür, dass du deine Schaltung nicht gezeigt hast, kann ich wirklich
nichts ;-)
Vielleicht hast du ja noch einen Widerstand hinzugefügt, der den
Lade-/Entladestrom des Kondensators begrenzt. Dann wären wir inzwischen
bei mindestens 2·4=8 externen Bauteilen, die mit dem Pollingverfahren
(egal, ob mit oder ohne Timer) allesamt wegfallen können.
Mi N. schrieb:> Erst darf man keinen Kondensator verwenden und dann darf man einen Pin> nicht zwischen Eingang und Ausgang umschalten?> Den Witz mußt Du mir erklären.
So langsam wird es absurd. Pollen geht mit etwa 5 Zeilen Code und
erfordert einfache Eingänge ohne jede HW-Aufbereitung.
Du suggerierst, dass es per Interrupt einfacher geht und präsentierst
uns dann (ohne auf deren Nachteile überhaupt einzugehen) ein ganzes
Pfund Salami.