Hallo, ich bin grade an meiner Diplomarbeit. Mein Thema ist Drehzahlmessung. Kurze Beschreibung: Es muss ein Messsystem entwickelt werden, dass die Drehzahl mehrerer (verschiedener) Zahnräder ausgeben kann (nicht parallel). Mein Eingangssignal bekomme ich von einem induktiven Sensor. Die Zahnräder haben von 10 bis zu 60 Zähne. Der Sinn der Sache ist es, ein universelles System zu entwickeln, der das Signal aller Zahnräder verarbeiten kann. Die Signalamplituden reichen bei geringer Drehzahl von 1Volt peak-peak bis zu 60 Volt peak-peak bei hoher Drehzahl. Dabei rede ich von drehzahlen von bis zu 30000Umdr./min. Da diese Messung sehr genau sein muss wird eine hochfrequente Abtastung erwartet, des Weiteren soll die Messung nahzu Echtzeitfähig sein. Am Ausgang soll ein TTL-Signal liegen und idealerweise parallel dazu eine 7-Segment-Anzeige, ein weiterer Ausgang soll das Signal zu weiteren Verarbeitung analos ausgeben können. Meine Vorstellung war gewesen: das analoge Signal m.H. eines ADC's in ein MC einzuspeisen das MC dementsprechend zu Programmieren und dann den TTL-Signal + 7-S-Anzeige ausgeben. Ein DAC soll dann den analogen Ausgang realisieren. Ist die Frage reicht die Arbeitsgeschwindigkeit eines MC's aus um einen nahezu echtzeitfähiges system zu entwerfen, wenn ja welcher MC käme in Frage? Auf weitere Vorschläge oder Alternativen freue ich mich hinsichtlich des möglichen Schaltungsaufbaus Danke im Voraus Gruß Koray
>30000Umdr./min. Das sind 500 Impulse pro Sekunde. Da langweilt sich dein uC. > Da diese Messung sehr genau sein muss Wie genau?
holger schrieb: >>30000Umdr./min. > > Das sind 500 Impulse pro Sekunde. Da langweilt sich dein uC. Bei 60 Zähnen sind das zwar "schon" wieder 30000 U/min, aber das sollte der µC auch noch verkraften. Ich würde mir eher Sorgen bezüglich der Schnelligkeit der induktiven Geber machen. Gruß, Magnetus
magnetus schrieb: > Bei 60 Zähnen sind das zwar "schon" wieder 30000 U/min, Quatsch! Sollte natürlich 30000 Impulse/s heissen.
Also, man müsste die Anzahl der Zähne mit der maximalen Drehzahl mutliplizieren und dann kommt die eigentliche Frequenz heraus und das wird dann schon hochfrequent. Und da die Messung wirklich genau sein muss, reicht eine Abtastung pro Impuls leider nicht, weil ich Maximum Minumum und Nulldurchgang detektieren muss (Nulldurchgang wäre die Mitte des Zahns).
dein µC langweilt sich trotzdem noch ... kommt auf die externe Beschaltung an und was für "Durchgangsdetektoren" du verwendest. Was verstehst du denn unter einer "hochfrequenten Frequenz" ? >>200 MHz ? Wieweit du mit der internen ADC kommst ist µC abhängig. Ansonsten halt ne externe nehmen. Die Echtzeitfähigkeit hängt wohl in diesem Falle von deinen Programmierkünsten ab...
Die Durchgangsdetektion soll ja im µC passieren. Ich glaube 200 MHz sind ausreichend, das wären dann nämlich bei max Drehzahl und max. Zähnen mehr als 100 Abtastungen pro Impuls (also auch pro Zahn). Lehrmann Michael schrieb: > Wieweit du mit der internen ADC kommst ist µC abhängig eben diese Infos brauche ich, um zu wissen welche µC geeignet wäre. Lehrmann Michael schrieb: > Die Echtzeitfähigkeit hängt wohl in diesem Falle von > deinen Programmierkünsten ab... hmm.. da hab ich eher nur Grundkenntnisse, Assembler kaum Wissen, C oder C++ wäre eher mein Ding aber bin auch kein Profi.
Es gibt im Wesentlichen zwei Methoden. die Eine ist die Impulsmessung waehrend einer definierten Zeit. zB anzahl impulse waehrend 10ms, oder die Andere ist die Periodenmessung, zb Wie lange dauern N-Impulse. N waere dann ein Vorteiler. Da muss man eben dan mal etwas probieren. Ich hab mal eine Regelung einer Luftturbine, die mit 4kHz lief, gebaut. Das Steuerglied was ein Druckluftspindelventil. Ging gut. Damals nahm ich einen 6809, heut wuerd ich einen AVR Mega32 oder so nehmen.
Koray schrieb: > Die Durchgangsdetektion soll ja im µC passieren. Ich glaube 200 MHz sind > ausreichend, das wären dann nämlich bei max Drehzahl und max. Zähnen > mehr als 100 Abtastungen pro Impuls (also auch pro Zahn). > Hm, naja... und eigentlich willst du nur die Drehzahl messen?
ja, aber da muss doch in beiden Fällen so eine Art Fenster laufen, d.h. bsp. wert 1-10 -> berechnen -> ausgeben-> wert2-11 -> berechnen -> ausgeben-> wert 3-12 -> usw.
Mal ne Frage: Wäre es nicht sinnvoll das Signal vorher etwas aufzubereiten? Beispielsweise per Op-Amp + Schmitt-Trigger zu einem sauberen TTL-Pegel-Rechteck formen, dann braucht man auch keinen ADC mehr und es sollte auch ein kleinerer ATMega reichen um die maximal 30.000Imp/s zählen zu können. Früher(tm) hat man Zähler auch mal aus diskreten bzw. gängigen TTL-IC´s aufgebaut...
H.joachim Seifert schrieb: > Koray schrieb: >> Die Durchgangsdetektion soll ja im µC passieren. Ich glaube 200 MHz sind >> ausreichend, das wären dann nämlich bei max Drehzahl und max. Zähnen >> mehr als 100 Abtastungen pro Impuls (also auch pro Zahn). >> > > > Hm, naja... und eigentlich willst du nur die Drehzahl messen? ja aber die Firma schreibt schon fast streng vor, der Nulldurchgang ist die mitte des Zahns also soll auch genau dieser wert genommen werden. Wobei die alte Systeme haben, die alle nur jeweils auf ein spezielles Zahnrad angepasst ist. Die alten Schaltungen sind analog und diese werden invertiert, da der impuls zum positiven geht dann nulldurchgang -> negativ und dann der nächste impuls. Die haben nur Detektoren für eine positiven Flanke, keine Ahnung warum, deshalb die Invertierung. Ich will das digital messen können, ansonsten wird die analoge Schaltung für alle Zahnräder viel zu komplex. Und je komplexer desto mehr Lötstellen, desto großer die Fehleranfälligkeit...
Andreas K. schrieb: > Mal ne Frage: Wäre es nicht sinnvoll das Signal vorher etwas > aufzubereiten? > Beispielsweise per Op-Amp + Schmitt-Trigger zu einem sauberen > TTL-Pegel-Rechteck formen, dann braucht man auch keinen ADC mehr und es > sollte auch ein kleinerer ATMega reichen um die maximal 30.000Imp/s > zählen zu können. > > Früher(tm) hat man Zähler auch mal aus diskreten bzw. gängigen TTL-IC´s > aufgebaut... Ich bin eigentlich für alle Lösungen offen. Mit Op-Amp und Schmitt-Trigger meinst du im analogen Bereich?? Das Thema ist ziemlich komplex wenn ich das richtig beschreiben sollte, kommt noch das Problem, dass wir Zahnräder haben die mal einen kürzeren oder längeren Zahn haben, um 1/rev erzeugen zu können. Und da bei steigender Drehzahl auch die Spannung steigt, gäbe es ein Problem, dass bei einer Beschleunigung evtl der längere Zahn oder bei der Abbremsung der kürzere Zahn übersehen wird.
egal, ob langer oder kurzer Zahn (komische Firma, die verschieden lange Zähne herstellt, dann aber auf exakter Messung in der Mitte des Zahns besteht :-) Schau dir mal das Signal auf einem Oszi an.... Begrenzen (auf sagen wir mal +/-1V), dahinter einen Komperator (auch der kann schon im MC integriert sein) und deine schnelle komplizierte Messung reduziert auf was ganz simples, was fast jeder heute erhältliche MC locker nebenbei erledigt. Ich schlag mal den Tiny2313 vor :-)
H.joachim Seifert schrieb: > egal, ob langer oder kurzer Zahn (komische Firma, die verschieden lange > Zähne herstellt, dann aber auf exakter Messung in der Mitte des Zahns > besteht :-) ja komisch, hast recht :-) aber die Sache ist, bei den neueren Zahnrädern haben die halt so ein system damit man die Drehzahl gleich aus dem einen Zahn rauslesen kann ausser die ganze zeit die einzelnen Zähne zu zählen > Schau dir mal das Signal auf einem Oszi an.... Ich hab schon ein Signal mit nem kürzen Zahn gesehen, da sind insgesamt 43 Zähne wobei eins kurz ist. Sieht aus wie ein Sinussignal nur dass der eine Impuls eine niedrigere Amplitude hat.
lass die Amplitude aus dem Spiel - miss die Zeit zwischen den Nulldurchgängen. Das kann zwischen 2 Zähnen sein, oder auch 10 oder ne ganze Umdrehung oder auch viele Umdrehungen.
H.joachim Seifert schrieb: > lass die Amplitude aus dem Spiel - miss die Zeit zwischen den > Nulldurchgängen. Das kann zwischen 2 Zähnen sein, oder auch 10 oder ne > ganze Umdrehung oder auch viele Umdrehungen. Sehr gute Idee eigentlich, aber diese komische Firma hat auch Zahnräder wo mal ein Zahn komplett fehlt, wie schon gesagt um 1/rev's zu erzeugen.
Auch das macht nichts, kannst du doch leicht erkennen. 59 mal in etwa gleiche Messzeit, 1 mal in etwa doppelte Zeit - ja und? Dafür hast du doch einen MC in den Händen. Sie dir das Beispiel mit dem 60-2 Sensor an, dort fehlen gleich 2 :-)
da ich noch nie mit einem µC gearbeitet habe, weiss ich da die ganzen Voraussetzungen gar nicht. Aber dem Antworten nach ist wohl ein nahezu echtzeitfähiges System mit den hohen Abtastraten möglich. Das erleichtert mich ein bisschen, wurde schon sehr entmutigt von einigen unwissenden Kollegen.
Also. Echtzeitfaehig bedeutet nicht wahnsinnig schnell als Megahertz, sondern den Anforderungen gerecht schnell genug. Und genau da sollte der Frager zuerst herausfinden wie schnell das System denn sein sollte. Denn wenn das ziel ein Display ist, den man alle 100ms updaten soll, dann darf das System 100ms fuer die Messung plus Anzeige verbraten.
Es ist vollkommen unnützt, über die Realisierung zu spekulieren, solange der OP nicht endlich mal damit herausrückt, wie genau die Messung sein muß und welche Meßrate nötig ist. Soll es für eine Anzeige sein, sind 2...5 Messungen/s ergonomisch. Peter
>Das Thema ist ziemlich komplex wenn ich das richtig beschreiben sollte, Das musst Du in der Diplomarbeit sowieso und vor der Realisierung sollte man ein möglichst exaktes Bild der Anforderungen haben! >haben die halt so ein system damit man die Drehzahl... Exaktes Verstehen der Ausgangssituation, des 'Istzustandes' ist genauso eine Voraussetzung >ein nahezu echtzeitfähiges System mit ... >Und da die Messung wirklich genau sein muss Exakte Vorgaben vorher muss man nicht über Realisierungsdetails reden >ich bin grade an meiner Diplomarbeit Sorry aber das klingt für mich eher nach einem überlastetetn Schüler bei einer Projektarbeit, als nach ingenieurmäßiger Vorgehensweise. Ist das wieder ein Beweis für die Generation Google und Wikipedia? Les Dir mal in Ruhe Deine Aussagen durch und schreibe mal die ersten 10 Seiten Deiner Diplomarbeit. Damit hast Du dann die Informationen die Du für dasd weitere Vorgehen brauchst. Wenn Du dann noch Hilfe brauchst stelle diese ersten 10 Seiten hier rein und wir wissen (dann hoffentlich) quantifizierbar um was es geht und können mit konkreten Tipps weiter helfen.
>ja aber die Firma schreibt schon fast streng vor, der Nulldurchgang ist >die mitte des Zahns Also mit einem induktiven Sensorwuerde ich mal vermuten, dass der Nulldurchgang auf einer Zahnflanke (Zentrum des Sensors) liegt. Die Mitte des Zahns duerfte ein Maximum sein. Gast
Nimm einen Komparator, der aus dem Eingangssignal ein Rechteck mit TTL-Pegel macht. Das kannst du beispielsweise am Interrupt-Eingang anlegen.
so nun habe ich genauere Angaben zu meinem System. Mein Ausgangssignal (TTL-Signal) soll maximal mit einer Verzögerung von 25nS aktualisiert werden. D.h. alle 25nS ein Signal. Meint ihr die Standart µC für paar Euros würden das noch hinbekommen, oder braucht man da schon ein hochleistungs-ding??
25 ns entspricht einer Signalflanke wie bei 40 MHz. In der Regel kann ein Timer-Eingang nicht schneller agieren als die CPU Frequenz. (Synchron zum CPU Takt wird gezählt). Also müsstest Du eine CPU verwenden, bei der der Timer mit mindestens 40MHz arbeiten kann. Ich empfehle hier einen aus der Reihe STM32 von ST. Siehe hier im Artikel: STM32 Der Timer1 kann bis zu 72MHz, so auch die CPU.
Koray schrieb: > 25nS aktualisiert werden. D.h. alle 25nS ein Signal. Uuups, alle 25ns ein TTL Signal ? Da musst du (oder der µC) aber schnell rechnen können.
Koray schrieb: > Mein Ausgangssignal (TTL-Signal) soll maximal mit einer Verzögerung von > 25nS aktualisiert werden. D.h. alle 25nS ein Signal. Das macht nicht so recht Sinn. Mit Deinem TTL Signal meint Dein Auftraggeber sicher ein digitales Signal das jeweils die Mitte eines Zahns kennzeichnet. Und die 25 ns sind wahrscheinlich der maximale Fehler zwischen tatsächlichem Zahndurchgang am Sensor und der Signalflanke Deines TTL Signals. Ich habe weiterhin nichr den Eindruck daß Du deine Aufgabe so richtig durchschaust, geschweige denn sie hier korrekt erklärst. Wenn der Sensor schnell genug ist ist es wahrscheinlich keine so große Kunst diese 25 nS zu erfüllen. Weit schwieriger dürfte Dein Problem sein daß die Eingangssignalpegel zwischen 1 und 60V liegen. Hier brauchst Du eine automatische Verstärkungs (Abschwächer)-Regelung. Die Frage ist wie schnell soll, muss die reagieren um den Eingangssignalpegel an deinen Komparator anzupassen.
Koray schrieb: > Die Signalamplituden reichen bei geringer Drehzahl von 1Volt peak-peak > bis zu 60 Volt peak-peak bei hoher Drehzahl. Dabei rede ich von Das ist irgendwie untypisch für induktive Sensoren. Wieso sollte sich die Ausgangsspannung mit der Drehzahl ändern? Ist das die korrekte Anforderung? Zahnräder an induktiven Sensoren erzeugen Sinuskurven, die ausgewertet werden können. Dafür gibt es Auswerteelektroniken. Schon mal ein bißchen gegoogelt? Renishaw Heidenhain Bei 30000U/min und 60 Zähnen liegst du bei 30kHz. Da liegst du meiner Erfahrung nach schon im oberen Frequenzbereich der Auswerteelektroniken (die man kaufen kann). Wie schon mehrfach erwähnt solltest du dir die Anforderungen einmal ganz genau aufschreiben und korrekt formulieren. Sonst bleibt das hier ein stochern im Pudding (oder so ähnlich).
Koray schrieb: > Mein Ausgangssignal (TTL-Signal) soll maximal mit einer Verzögerung von > 25nS aktualisiert werden. D.h. alle 25nS ein Signal. Das ist völlig unsinnig. Selbst bei Deiner höchsten Drehzahl (30000Umdr./min * 60 Zähne) hast Du maximal 30kHz (33µs). 25ns hieße dann, besser als einen tausendstel Zahn aufzulösen. Peter
Koray schrieb: > so nun habe ich genauere Angaben zu meinem System. > Mein Ausgangssignal (TTL-Signal) soll maximal mit einer Verzögerung von > 25nS aktualisiert werden. D.h. alle 25nS ein Signal. > > Meint ihr die Standart µC für paar Euros würden das noch hinbekommen, > oder braucht man da schon ein hochleistungs-ding?? Vom Scheitelwert der Sinuskurve bis zur Signalausgabe in nur 25ns, das halte ich für eine sehr hohe Anforderung. Ich fürchte, das ist mit einem µC nur schwer zu lösen. Das schnellste System, das ich kenne ist der Renishaw RGE10 (wir arbeiten noch mit einer Verzahnfachung der Zähne) und der hat schon einen Jitter von 40ns. Vielleicht wird das bei den nicht interpolierenden Systemen besser. "Jitter" bedeutet in diesem Fall, dass die Pulse nicht immer zur gleichen Zeit kommen bzw. nicht im gleichen Abstand kommen (das hängt wohl mit der Auswertung der Sinuskurve zusammen). Und hier ist KEIN µC verbaut ! Alles analog. Wie der zeitliche Zusammenhang zwischen Scheitelwert und Impulsausgabe ist, wage ich gar nicht zu untersuchen (ist für uns auch uninteressant).
Udo R. S. schrieb: >> Mein Ausgangssignal (TTL-Signal) soll maximal mit einer Verzögerung von > >> 25nS aktualisiert werden. D.h. alle 25nS ein Signal. > > > > Das macht nicht so recht Sinn. Mit Deinem TTL Signal meint Dein > > Auftraggeber sicher ein digitales Signal das jeweils die Mitte eines > > Zahns kennzeichnet. > > Und die 25 ns sind wahrscheinlich der maximale Fehler zwischen > > tatsächlichem Zahndurchgang am Sensor und der Signalflanke Deines TTL > > Signals. Sorry natürlich meine ich genau das was udo sagt (falsch formuliert).
Udo R. S. schrieb: > Wenn der Sensor schnell genug ist ist es wahrscheinlich keine so große > > Kunst diese 25 nS zu erfüllen. Weit schwieriger dürfte Dein Problem sein > > daß die Eingangssignalpegel zwischen 1 und 60V liegen. Die Spannungsänderung erfolgt nicht im ms bereich, sondern schon über eine längere Zeit, deshalb denke ich ist es schon (auch automatisch) möglich eine Spannungsregelung zu realisieren. Zu deinen anderen Aussagen, dass ich meiner Aufgabenstellung nicht bewusst bin: Ich bin bewusst, was ich zu entwickeln, habe. Nur leider habe ich nicht nur ein Punkt an dem ich hänge, weswegen sich mein Durcheinander wahrscheinlich auch auf meine Erklärung hier wirkt. Jedesmal wenn ich eine Lösung zur Problemstellung meinen Betreuern vorstelle, bekomme ich anstatt "ja möglich aber das, das das... musst du beachten" "ne das funktioniert so nicht, ohne weitere wirklich handfeste Aussagen, welche mich um ehrlich zu sein auch sehr demotivieren.
Koray schrieb: > Sorry natürlich meine ich genau das was udo sagt (falsch formuliert). Wie oben schon geschrieben habe ich das vermutet. Diese Anforderung halte ich fast für nicht machbar. Jedenfalls nicht, wenn deine Betreuer dich so demotivieren, wie du schreibst. Etwas konstruktives müsste da schon kommen. Sonst läuft es nach dem Motto: Wir fordern halt mal, mal sehen was rauskommt. Was sagt denn dein betreuender Prof dazu?
Daniel V. schrieb: > Was sagt denn dein betreuender Prof dazu? Meine Uni und die Firma sind ca 600 km weit voneinander entfernt, mein Prof hat mir angeboten, falls ich nicht wirklich klarkomme auch mal rüberzukommen.
Koray schrieb: > Meine Uni und die Firma sind ca 600 km weit voneinander entfernt, mein > Prof hat mir angeboten, falls ich nicht wirklich klarkomme auch mal > rüberzukommen. Wie ich schon eingangs gesagt habe. Definiere doch mal eindeutig und in klarer Sprache zusammen mit Deinen Auftraggebern die Anforderungen. Das ist der erste Schritt und das Aund O. Diese Formulierung der Anforderungen lässt Du dir wenn irgendmöglich von der Firma absegnen. Damit kannst Du dann mal Deinen Prof anmailen ggf. mit der Bitte um ein telefonat. Rüberkommen ist erst der übernächste Schritt wenn gar nix geht.
Udo R. S. schrieb: > Koray schrieb: >> Meine Uni und die Firma sind ca 600 km weit voneinander entfernt, mein >> Prof hat mir angeboten, falls ich nicht wirklich klarkomme auch mal >> rüberzukommen. > Wie ich schon eingangs gesagt habe. Definiere doch mal eindeutig und in > klarer Sprache zusammen mit Deinen Auftraggebern die Anforderungen. Das > ist der erste Schritt und das Aund O. Diese Formulierung der > Anforderungen lässt Du dir wenn irgendmöglich von der Firma absegnen. > Damit kannst Du dann mal Deinen Prof anmailen ggf. mit der Bitte um ein > telefonat. Rüberkommen ist erst der übernächste Schritt wenn gar nix > geht. Sehe ich auch so!
Guten Morgen, also ganz klare Aussagen von meinen Betreuern aus der Firma: Der Signalfehler soll nicht über 25ns liegen. Was ich noch herausfinden muss ist, wie hoch meine Schaltung abtasten muss, um höchsten diesen Fehlerbereich zu realisieren. Des Weiteren die 7-Segment Anzeige ist erstmal zweitrangig bezüglich der aktualisierung wie auch schon oben erwähnt. Der TTL-Ausgang ist das Wichtigste. Ideale Signalübertragungszeit = 0. Aber da dies nicht möglich ist, das bestmögliche rausholen. Andreas K. schrieb: > Mal ne Frage: Wäre es nicht sinnvoll das Signal vorher etwas > aufzubereiten? > Beispielsweise per Op-Amp + Schmitt-Trigger zu einem sauberen > TTL-Pegel-Rechteck formen, dann braucht man auch keinen ADC mehr und es > sollte auch ein kleinerer ATMega reichen um die maximal 30.000Imp/s > zählen zu können. > > Früher(tm) hat man Zähler auch mal aus diskreten bzw. gängigen TTL-IC´s > aufgebaut... Ich habe meinen Betreuern die Lösung mit einem µC vorgestellt. Diese waren davon auch überzeugt, wobei einer meiner Betreuer genau das mit dem Op-Amp + Schmitt-Trigger angesprochen hatte, um den µC in gewisser Weise zu entlasten. Der AD Wandler sollte 16bit und 1 MHz mindestens bewerkstelligen können, ist die Frage ob die integrierte ADC's dies drauf haben, oder doch lieber ein externes gewählt werden sollte.
Ich muss ganz ehrlich zugeben, dass ich aus dem ganzen Wirrwarr nicht herauslesen konnte, was denn nun eigentlich wie gemessen werden soll, was die Anforderungen bezueglich Genauigkeit des Messwertes und der Geschwindigkeit der Ausgabe sind und was fuer Signale ueberhaupt ausgegeben werden sollen. Das solltest Du Dir selbst erst einmal klar und deutlich aufschreiben. Dann siehst Du auch selbst schon wesentlich besser durch. Gast P.S. Und wozu benutzt man einen ADC zum Drehzahlmessen?
>Der Signalfehler soll nicht über 25ns liegen. und >Der AD Wandler sollte 16bit und 1 MHz mindestens bewerkstelligen können Diese Aussagen sind vollkommen widersprüchlich. Bei 1 Mhz Abtastrate hast Du einen maximalen Fehler von 1/1000000 s = 1µs und damit schon das 20fache des erlaubten Wertes. Und da ist noch keine Rechenzeit und die mindestens doppelte Abtastrate eingerechnet um das Maximum überhaupt genau genug erkennen zu können. Um auch nur annähernd mit einem Rechner sicher das Maximum erkennen zu können bräuchtest Du über den Daumen gepeilt mindestens 100MHz Abtastrate. Und warum 16Bit? Damit hast Du einen Dynamikumfang über 4,5 Dekaden nur um ein Maximum erkennen zu können? Ich sage zwar nicht das das Vorhaben unmöglich ist, aber das rein digital in den gegebenen Grenzen zu realisieren ist auf jeden Fall schon recht sportlich. Dazu brauchtest Du meiner Meinung nach mindestens einen 100MHz besser 200MHz AD Wandler und einen leistungsfähigen Echtzeitrechner der die Datenmengen kontinuierlich verarbeiten kann. Ich sag mal salopp 2GHz Taktfrequenz und in Assembler programmieren. Sportlich sportlich.
Udo R. S. schrieb: >>Der Signalfehler soll nicht über 25ns liegen. > und >>Der AD Wandler sollte 16bit und 1 MHz mindestens bewerkstelligen können > > Diese Aussagen sind vollkommen widersprüchlich. > > Sportlich sportlich. Ja, sehe ich auch so. Irgendetwas haben wir noch nicht richtig verstanden, oder die gestellten Anforderungen sind schlichtweg Humbug. Was bedeutet: "Der Signalfehler soll nicht über 25ns liegen." ?? Welche Zeit soll <25ns sein ?
Es wurde gesagt, dass diese 16bit und 1MHz das Mindeste ist, wenn das Signal analog vorher schon vorbereitet wird und dann in den µC geht. Das Wichtigste sind diese 25ns Messungenauigkeit, die auf jeden Fall eingehalten werden muss. Das es sportlich ist, ist mir mittlerweile sehr klar, da man mir auch schon vorher gesagt hat, dass ein hobbyµC dies wahrscheinlich nicht auf die reihe bekommen würde. Deshalb wurde mir auch schon vorgeschlagen nach professionellen HochleistungsµC zu schauen. Ich stehe mit den ganzen Aussagen selber mittlerweile total auf dem Schlauch.
Koray schrieb: > Es wurde gesagt, dass diese 16bit und 1MHz das Mindeste ist, wenn das > Signal analog vorher schon vorbereitet wird und dann in den µC geht. Das > Wichtigste sind diese 25ns Messungenauigkeit, die auf jeden Fall > eingehalten werden muss. > > Das es sportlich ist, ist mir mittlerweile sehr klar, da man mir auch > schon vorher gesagt hat, dass ein hobbyµC dies wahrscheinlich nicht auf > die reihe bekommen würde. Deshalb wurde mir auch schon vorgeschlagen > nach professionellen HochleistungsµC zu schauen. > > Ich stehe mit den ganzen Aussagen selber mittlerweile total auf dem > Schlauch. OK, mach mal eine graphische Darstellung deiner Signale und zeichne da die Zeit(en) ein, die relevant sind. Was liefert der induktive Sensor für ein Signal? Wie sieht es aus (zeitlich gesehen). Dieses Signal geht in eine "BlackBox", welche Signale sollen aus der "BlackBox" rauskommen? Wie ist das Zeitverhältnis der Ein- und Ausgangssignale. Das ist hier, glaube ich, noch keinem so richtig klar. Danach können wir über Lösungsmöglichkeiten sprechen.
Angehängte Dateien:
-

_C.png
130 KB
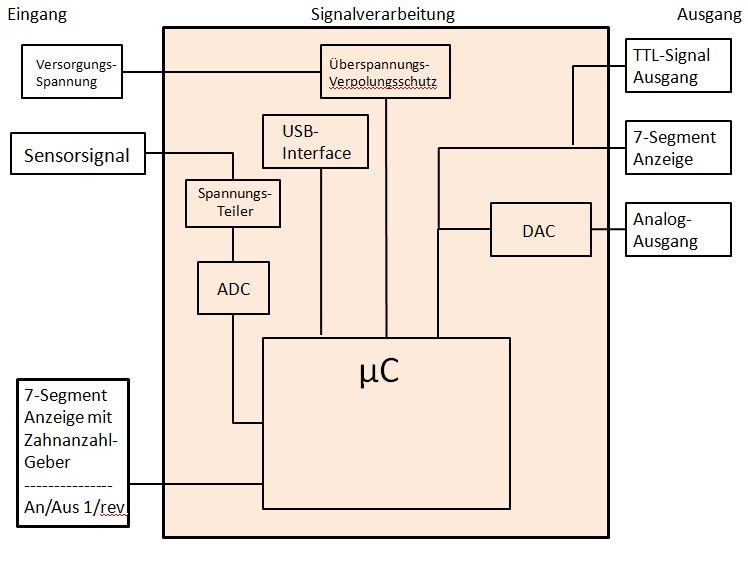
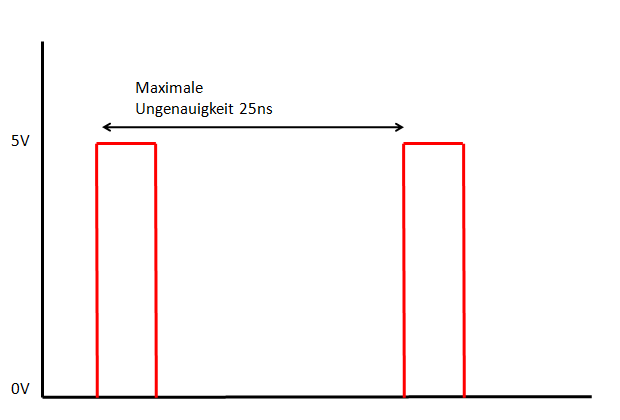
ok jetzt mal alles ganz ordentlich. Ich muss ein Drehzahlkonditioniersystem entwickeln, das für verschiedene Zahnräder mit unterschiedlicher Anzahl von Zähnen einsetzbar ist. Die maximale Drehzahl der Räder beträgt 30000Umdr./min und die maximale Anzahl der Zähne beträgt 60. Das TTL-Signal das am Ausgang erwartet wird, soll einen maximalen Fehler von 25ns einhalten. D.h. die Zeit des detektierten Zahns soll mit einer Genauigkeit von +/- 25ns angegeben werden können. Mein Blockdiagramm, dass ich meinen Betreuern vorgestellt hatte sieht folgendermaßen aus.
Koray schrieb: > ok jetzt mal alles ganz ordentlich. > > Ich muss ein Drehzahlkonditioniersystem entwickeln, das für verschiedene > Zahnräder mit unterschiedlicher Anzahl von Zähnen einsetzbar ist. Die > maximale Drehzahl der Räder beträgt 30000Umdr./min und die maximale > Anzahl der Zähne beträgt 60. > > Das TTL-Signal das am Ausgang erwartet wird, soll einen maximalen Fehler > von 25ns einhalten. D.h. die Zeit des detektierten Zahns soll mit einer > Genauigkeit von +/- 25ns angegeben werden können. Mein Blockdiagramm, > dass ich meinen Betreuern vorgestellt hatte sieht folgendermaßen aus. Ich würde mal sagen, das geht so nicht.
Sind die Zähne mechanisch überhaupt so genau gefertigt, um sie mit der Genauigkeit abzutasten? Ich denke dafür kommt nur ein optisches Abtastverfahren in Frage. (Lichtschranke mit kleinem Fokus)
Sebastian schrieb: > Sind die Zähne mechanisch überhaupt so genau gefertigt, um sie mit der > Genauigkeit abzutasten? Ich denke dafür kommt nur ein optisches > Abtastverfahren in Frage. (Lichtschranke mit kleinem Fokus) Das ist eines der Probleme, die ich mit "Jitter" in einem vorherigen Beitrag angedeutet habe... Hier gibt es eine ganze Reihe von Problemen...
Angehängte Dateien:
-

signal.png
10 KB -

signal2.png
7,5 KB
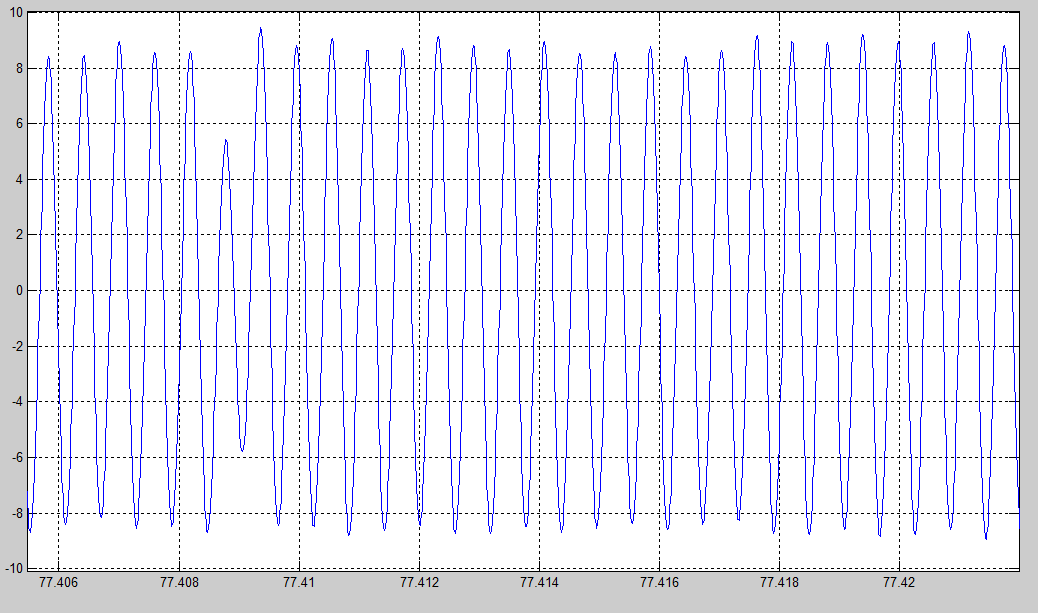

Hier ist ein Signal von dem Sensor, da ist ein kurzer Zahn zu erkennen, dieser Zahnrad hat bsp. 43 Zähne. Das Signal sieht aus wie ein Sinus. Die eigentlich relevanten Zeiten sind die Abstände zwischen den Nulldurchgängen, womit ich dann letzendlich die Drehzahl herausbekomme. Zeitverhältnis Ein-Ausgang so gering wie nur möglich, da habe ich keine Angaben, weil die das beste erwarten, da sie nicht wissen was realisierbar ist muss ich das selber herausfinden. Das Ausgangssignal soll ein TTL-Signal (0/5Volt) sein, welches dann die die Zähne anzeigt, d.h. bei 0 = Lücke bei 5V = Zahn.
Koray schrieb: > Hier ist ein Signal von dem Sensor, da ist ein kurzer Zahn zu erkennen, > dieser Zahnrad hat bsp. 43 Zähne. Das Signal sieht aus wie ein Sinus. > Die eigentlich relevanten Zeiten sind die Abstände zwischen den > Nulldurchgängen, womit ich dann letzendlich die Drehzahl herausbekomme. > > Zeitverhältnis Ein-Ausgang so gering wie nur möglich, da habe ich keine > Angaben, weil die das beste erwarten, da sie nicht wissen was > realisierbar ist muss ich das selber herausfinden. Das Ausgangssignal > soll ein TTL-Signal (0/5Volt) sein, welches dann die die Zähne anzeigt, > d.h. bei 0 = Lücke bei 5V = Zahn. Das hört sich schon besser und machbar an. Wo bleiben aber die 25ns ???
Daniel schrieb: >Das schnellste System, das ich kenne ist der Renishaw RGE10 (wir >arbeiten noch mit einer Verzahnfachung der Zähne) und der hat schon >einen Jitter von 40ns. Daniel scheint da wesentlich mehr Kenntnisse undPraxiserfahrung zu haben als ich. (Ich bin rein in Software unterwegs obwohl ich mal Regelungstechnik studiert habe) Wenn er sagt daß das schnellste System das er kennt fast doppelt so ungenau ist dann wiegt das schon schwer. Ich würde mich an Deiner Stelle mal von dem Dogma verabschieden, daß Du das TTL Signal über einen Prozessor erzeugen musst. Bzw. Du solltest Dich mal mit deinem Hochschulbetreuer (Prof?) zusammensetzen und ihm die beiden Lösungsansätze (Abtastung, digitale Erzeugung oder analoge Gewinnung des TTL Signals durchsprechen. Dazu solltest Du aber noch einige Nebenbedingungen haben: Wie schnell muß das System sich einschwingen, also wie schnell muß es vom Start der Messung die Genauigkeit erreichen? Wie hoch ist die maximale Änderungsgeschwindigkeit der Drehzahl, die erfasst werden können muss? mehr ...??? Viel Erfolg
>Zeitverhältnis Ein-Ausgang so gering wie nur möglich, da habe ich keine
Was fuer ein Verhaeltnis?
Wenn Du sicher feststellen willst, ob sich ein Zahngrund oder ein Zahn
vor dem Sensor befindet, musst Du Dir erstmal Gedanken darum machen,
welche Ausgangsspannung welcher Position zugeordnet ist. Ausserdem musst
Du Dir Gedanken machen, welche Verzoegerungen bei der Bildung dieser
Spannung schon auftreten koennen. Dazu musst Du definitiv dieses System
entweder theoretisch untersuchen oder die Positionen mit min. 2
physikalisch unterschiedlichen Messverfahren vergleichen.
Die Abstaende der Nulldurchgaenge zu messen, sollte nicht das Problem
sein, die immer noch unklaren Anforderungen an das "TTL-Signal" schon.
Wenn Du gleich noch ein Signal von der Welle abnimmst, dass eine
steigende Flanke pro Umdrehung hat, dann kannst Du die Zaehnezahl
uebrigens gleich automatisch erfassen.
Gast
p.S. das Diagramm macht es nicht klarer.
Daniel V. schrieb: >> Die Signalamplituden reichen bei geringer Drehzahl von 1Volt peak-peak >> bis zu 60 Volt peak-peak bei hoher Drehzahl. Dabei rede ich von > > Das ist irgendwie untypisch für induktive Sensoren. Wieso sollte sich > die Ausgangsspannung mit der Drehzahl ändern? Ist das die korrekte > Anforderung? Ich denke es wird ein Reluktanzsensor (Spule, Magnet, ferromagnetisches Zahnrad) verwendet. Der gibt typischerweise mit steigender Drehzahl höhere Spannungen aus. Dazu habe ich oben die beiden IC's zur Signalaufbereitung aufgeschrieben.
jhgjh schrieb: > Wenn Du sicher feststellen willst, ob sich ein Zahngrund oder ein Zahn > vor dem Sensor befindet, musst Du Dir erstmal Gedanken darum machen, > welche Ausgangsspannung welcher Position zugeordnet ist. Ausserdem musst > Du Dir Gedanken machen, welche Verzoegerungen bei der Bildung dieser > Spannung schon auftreten koennen. Dazu musst Du definitiv dieses System > entweder theoretisch untersuchen oder die Positionen mit min. 2 > physikalisch unterschiedlichen Messverfahren vergleichen. Es gibt ja bereits alte Lösungen die analog realisiert wurden. Aber die sind immer auf ein Zahnrad ausgelegt. Ich soll ja ein universelles entwickeln. Wo ich klare Aussagen erhalten habe ist, das Zahnmitte genau der Nulldurchgang bei der absteigenden Flanke ist. Deshalb brauche ich nicht nochmal die Signale zu vergleichen. Ausserdem soll ich ja nicht den Sensor optimieren, wie lange der Sensor braucht ist mir egal, weil meine Aufgabe ist, dieses Signal aus dem Sensor zu verarbeiten. Sebastian schrieb: > Ich denke es wird ein Reluktanzsensor (Spule, Magnet, ferromagnetisches > Zahnrad) verwendet. Der gibt typischerweise mit steigender Drehzahl > höhere Spannungen aus. Genau das ist es, der Sensor arbeitet induktiv mit SPulen.
Sebastian schrieb: > Dazu habe ich oben die beiden IC's zur Signalaufbereitung > aufgeschrieben. Was wird eigentlich mit "IC" gemeint?
Koray schrieb: > Der Signalfehler soll nicht über 25ns liegen. Also ich kann damit garnichts anfangen. Was soll das für ein Signal sein? Soll ein Puls pro Zahn da rauskommen? Dann sind 25ns unrealisierbar. Und dann ist es am einfachsten, das analog aufzubereiten. Du solltest auch erstmal feststellen, wozu das ominöse Signal überhaupt dienen soll. Peter
>Wo ich klare Aussagen erhalten habe ist, das Zahnmitte genau >der Nulldurchgang bei der absteigenden Flanke ist. Da habe ich erhebliche Zweifel. Die Zahnmitte wird eher das Maximum der Sinusspannung in eine der beiden Polaritaeten sein. Gast
jhgjh schrieb: >>Wo ich klare Aussagen erhalten habe ist, das Zahnmitte genau >>der Nulldurchgang bei der absteigenden Flanke ist. > > Da habe ich erhebliche Zweifel. Die Zahnmitte wird eher das Maximum der > Sinusspannung in eine der beiden Polaritaeten sein. > > Gast Ich hab nach einigen Aussagen hier, extra nochmal nachgefragt, und man hat mir gesagt, dass genau der Nulldurchgang die Zahnmitte ist. Ich frag gleich nochmal nach.
Ich habe eben nachgefragt, der Nulldurchgang ist definitiv die Zahnmitte.
IC heißt integrated circuit = integrierte Schaltung = umgangssprchlich "Chip" Die beiden "chips" in meinem Beitrag oben machen genau das was Du willst! Sie erzeugen aus dem Sinus vom Reluktanzsensor ein schönes TTL-Signal. Wie genau das Ergebnis ist steht in den Datenblättern. http://datasheets.maxim-ic.com/en/ds/MAX9924-MAX9927.pdf http://www.national.com/ds/LM/LM1815.pdf (nur weil ich heute gute Laune habe)
Fragen über Fragen: Was ist denn ein Drehzahlkonditioniersystem? Was soll mit der Messung gemacht werden? Muß nur die Zeit zwischen 2 Impulsen so genau sein, weil die Drehzahl hochgenau erfasst werden soll? Oder muß auch die Änderung der Drehzahl pro Zeit so genau erfasst werden? Muß kontinuerlich über einen längeren Zeitraum erfasst werden? Oder kann ein Rechnersystem zunächst eine Grobmessung machen um die Zahnanzahl und die ungefähre Drehzahl zu erfassen und damit dann die optimale Abtastrate ermitteln, dann -wie bei Digitalscope- für eine Umdrehung eine hochauflösende Abtastung machen, und diese dann in den nächsten 20 ms verarbeiten, dann wieder eine Messung, die wieder verarbeiten, ... etc. In dem Fall könnte man das schön digital realisieren. Deswegen mein Generve: kontinuierlich und Drehzahländerung pro Zeit, oder nur zyklich hochgenaue Erfassung der Drehzahl.
Koray schrieb: > Ausgangssignal TTL Wenn ich dich richtig verstanden habe, soll pro Zahn ein TTL-Puls erzeugt werden. --> da gibt's fertige Elektroniken (Heidenhain, Renishaw) Die Ungenauigkeit zwischen den Pulsen soll <25ns sein. Hm.. leider verstehe ich nicht recht, was gemeint ist. Ich fürchte, damit ist die zeitliche Position der aufeinanderfolgenden Zähne gemeint. Z.B. wenn mit konstanter Drehzahl gefahren wird, dann müssten die Zeit-Abstände zwischen den TTL Pulse immer gleich sein. Sind sie aber nicht, wie man sich vorstellen kann. Also gibt man eine Toleranz an: +-25ns dürfen die TTL-Pulse "jittern". Wie ich früher mal geschrieben habe, hat der Renishaw ein Jitter von 40ns (oder +-20ns). Das beste was ich kenne(was jetzt nicht heißt, dass es nix besseres gibt). Aber wir haben hier genau auch mit diesem 'Problem' zu kämpfen. Das dürfte eines deiner größten Probleme werden (wenn ich alle anderen Anforderungen korrekt verstanden habe). Auch entsprechendes Messwerkzeug ist notwendig (Oszi > 100MHz z.B). Koray schrieb: > Zeitverhältnis Ein-Ausgang so gering wie nur möglich, da habe ich keine > Angaben, weil die das beste erwarten, da sie nicht wissen was > realisierbar ist muss ich das selber herausfinden. Das heißt, die Zeit, die vergeht, ab der Erkennung eines Zahnes bis zum TTL Signal soll möglichst kurz sein, ist aber offensichtlich nicht so wichtig. --> kein Problem Na, jetzt wirds doch was...
Udo R. S. schrieb: > Fragen über Fragen: > > Was ist denn ein Drehzahlkonditioniersystem? > Was soll mit der Messung gemacht werden? > Muß nur die Zeit zwischen 2 Impulsen so genau sein, weil die Drehzahl > hochgenau erfasst werden soll? ja > Oder muß auch die Änderung der Drehzahl pro Zeit so genau erfasst > werden? auch, aber die Drehzahl ändert sich nie abrupt. Eine Änderung von 5000Umdr./min wird ca 5 Sekunden brauchen. > Muß kontinuerlich über einen längeren Zeitraum erfasst werden? ja, eine Messung oder ein Test kann bis zu einer Stunde dauern > Oder kann ein Rechnersystem zunächst eine Grobmessung machen um die > Zahnanzahl und die ungefähre Drehzahl zu erfassen und damit dann die > optimale Abtastrate ermitteln Wie weit das System hochgefahren werden soll wird schon vor dem Test festgelegt. Die Zähne sind auch schon bekannt. Also kann dem System die Anzahl der Zähne vorgegeben werden. Die optimale Abtastrate vorher zu bestimmen wäre keine angenehme Lösung, deswegen soll ich das maximum rausholen. > Deswegen mein Generve: kontinuierlich und Drehzahländerung pro Zeit, > oder nur zyklich hochgenaue Erfassung der Drehzahl. Generve ist das auf keinen Fall, ich merke ja selber, dass ich verwirrt bin und Kritik kann ich gut vertragen. Dann werde ich wenigstens hier nicht mit "ach das geht schon, kriegst du schon hin" belabert, was mich zwar motiviert aber leider nicht weiterbringt. Tatsachen sind schon ok, also danke ich euch für das "Generve" :-)
Sebastian schrieb: > IC heißt integrated circuit = integrierte Schaltung = umgangssprchlich > "Chip" > > Die beiden "chips" in meinem Beitrag oben machen genau das was Du > willst! Sie erzeugen aus dem Sinus vom Reluktanzsensor ein schönes > TTL-Signal. > Wie genau das Ergebnis ist steht in den Datenblättern. > > http://datasheets.maxim-ic.com/en/ds/MAX9924-MAX9927.pdf Seite 3: Propagation Delay Jitter: Typisch 20ns Merkst du was?
Daniel V. schrieb: > Seite 3: Propagation Delay Jitter: Typisch 20ns > > Merkst du was? Dumme Frage aber was bedeutet Propagation Delay Jitter??
Koray schrieb: > Daniel V. schrieb: >> Seite 3: Propagation Delay Jitter: Typisch 20ns >> >> Merkst du was? > > Dumme Frage aber was bedeutet Propagation Delay Jitter?? Entier System = Gesammtsystem Propagation Delay = Verzögerungszeit --> Verzögerungszeit des Gesamtsystem ist mit 50ns bzw. 150ns angegeben - also von Signal rein (Zahnrad) bis Signal raus (TTL). Allerdings gibts da eine Ungenauigkeit (Jitter) von 20ns. Das heiß, selbst wenn das Sinussignal immer die gleiche Signalform hätte (hätte man Rauschen und Störungen eliminiert), würden die TTL-Pulse mit einer Verzögerung von 50ns ausgegeben, allerdings mit einer zeitlichen Ungenauigkeit von 20ns (es können also auch mal 30ns oder 70ns oder 62ns oder ... sein).
Daniel V. schrieb: > Entier System = Gesammtsystem > Propagation Delay = Verzögerungszeit > --> Verzögerungszeit des Gesamtsystem ist mit 50ns bzw. 150ns angegeben > - also von Signal rein (Zahnrad) bis Signal raus (TTL). > Allerdings gibts da eine Ungenauigkeit (Jitter) von 20ns. Das heiß, > selbst wenn das Sinussignal immer die gleiche Signalform hätte (hätte > man Rauschen und Störungen eliminiert), würden die TTL-Pulse mit einer > Verzögerung von 50ns ausgegeben, allerdings mit einer zeitlichen > Ungenauigkeit von 20ns (es können also auch mal 30ns oder 70ns oder 62ns > oder ... sein). Und wenn man dann noch die Verzögerung beachtet, die der µC für seine Berechnungen braucht, ist das geforderte also nicht zu realisieren??
>allerdings mit einer zeitlichen Ungenauigkeit von 20ns >(es können also auch mal 30ns oder 70ns oder 62ns >oder ... sein). Stop wenn der Jitter max. 20 ns ist dann ist das doch etwas anderes als +-20ns. Dann dürfte die Ungenauigkeit zwischen 40 und 60 ns liegen, nicht zwischen 30 und 70, oder liege ich da falsch?
Koray schrieb: > Daniel V. schrieb: >> Entier System = Gesammtsystem >> Propagation Delay = Verzögerungszeit >> --> Verzögerungszeit des Gesamtsystem ist mit 50ns bzw. 150ns angegeben >> - also von Signal rein (Zahnrad) bis Signal raus (TTL). >> Allerdings gibts da eine Ungenauigkeit (Jitter) von 20ns. Das heiß, >> selbst wenn das Sinussignal immer die gleiche Signalform hätte (hätte >> man Rauschen und Störungen eliminiert), würden die TTL-Pulse mit einer >> Verzögerung von 50ns ausgegeben, allerdings mit einer zeitlichen >> Ungenauigkeit von 20ns (es können also auch mal 30ns oder 70ns oder 62ns >> oder ... sein). > > Und wenn man dann noch die Verzögerung beachtet, die der µC für seine > Berechnungen braucht, ist das geforderte also nicht zu realisieren?? Jain! Das ist eben das, was irgendwie noch unsicher ist. Was ist mit den geforderten 25ns gemeint? Es heißt einfach, dass selbst der Maxim-Baustein die TTL-Signale nicht genauer als 20ns (ob das nun +-10ns oder +-20ns sind, sei mal egal) ausgeben kann, selbst wenn die Drehzahl konstant wäre. Weil das System das einfach nicht her gibt. Schließe deine Sensoren an diesen Baustein an und du hast auf deinen TTL-Sigalen einen Jitter von 20ns. Ich denke, das ist das, was gefordert wurde. Wenn man aus den TTL-Signalen die Drehzahl berechnen würde, hätte man selbst bei absolut konstanter Drehzahl nicht immer den exakt gleichen Wert - eben durch den Jitter. Die Durchlaufzeit durch das Gesammtsystem ist dabei zunächst mal egal.
Ich hab das mal nachgerechnet: Angenommen, dein Zahnrad hat 50mm Durchmesser, dann würden 50ns bei 30000U/min etwa 4um am Umfang bedeuten. Nicht gerade viel.Sehr gute Zahnräder der höchsten Qualität haben Toleranzen in dieser Größenordnung. Wenn man weiters bedenkt, daß es auch so etwas wie Lagerspiel (schnell mal 10um),thermische Ausdehnung und Vibrationen gibt, führt sich das ganze schnell ad absurdum. Fazit:Das Geforderte wäre schon mechanisch nicht mal unter Laborbedingungen zu erreichen. Frage: denken die Herrschaften auch mal nach oder haben die nur mehr die Pensionierung im Kopf? Grüße
Gebhard Raich schrieb: > Ich hab das mal nachgerechnet: > Angenommen, dein Zahnrad hat 50mm Durchmesser, dann würden 50ns bei > 30000U/min etwa 4um am Umfang bedeuten. Nicht gerade viel.Sehr gute > Zahnräder der höchsten Qualität haben Toleranzen in dieser > Größenordnung. Wenn man weiters bedenkt, daß es auch so etwas wie > Lagerspiel (schnell mal 10um),thermische Ausdehnung und Vibrationen > gibt, führt sich das ganze schnell ad absurdum. > Fazit:Das Geforderte wäre schon mechanisch nicht mal unter > Laborbedingungen zu erreichen. > > Frage: denken die Herrschaften auch mal nach oder haben die nur mehr die > Pensionierung im Kopf? > > Grüße meine rede :-)
Gebhard Raich schrieb: > Ich hab das mal nachgerechnet: > Angenommen, dein Zahnrad hat 50mm Durchmesser, Es sind Zahnräder mit größerem Durchmesser, mind. 30cm. genaue Durchmesserangaben habe ich momentan nicht zu Hand. > Fazit:Das Geforderte wäre schon mechanisch nicht mal unter > Laborbedingungen zu erreichen. Die Herrschaften haben schon Methoden um Tip Timing mit einer Genauigkeit von 25ns zu ermitteln. Tip Timing Beispiel (Das drehende Blättchen): http://www.agilismeasurementsystems.com/nsms/fundamentals/arrival-times-to-deflection.html > Frage: denken die Herrschaften auch mal nach oder haben die nur mehr die > Pensionierung im Kopf? Ich glaube die sind dazu noch zu jung (Durchschn. Alter 35) :-)
Hallo, die absolute Verzögerung ist doch relativ egal. Hauptsache konstant mit dem besagtem Jitter. Aber nur mal zu Rechnung. Maximal 30000 u/min und maximal 60 Zähne == 6 Grad Abstand: Zeitlicher Abstand zwischen zwei Zähnen minimal: dt= 1/30000 s = 33333 ns 20 ns sind also 1/1667 davon, also 0,0006 oder 600 ppm oder 0,0036 Grad= 0,000062832 im Bogenmass.Bei einem Kopfdurchmesser des Zahnrades 100 mm sind das 6,28.. Mikrometer ( wie groß ist der Teilungsfehler der Zahnspitzen ?? ) . Und das über 2 Zähne gerechnet. Recht albern das.. Oh schon gerechnet ...
Nochmal um etwas klarzustellen die Zähne sind nicht spitz, sondern rechteckig.
Horst Hahn schrieb: > Hallo, > Recht albern das.. > Nee, albern ist das nicht, wenn man einen sehr exakten und konstanten zeitlichen Zusammenhang zwischen Ursprungssignal und Ausgangssignal haben möchte. Diese Anwendung gibt es durchaus...
dito... vlt. darfst Du ja das Gesamtprojekt / Anwendung schreiben? Das interessiert bestimmt alle hier. Oft wird mit großen Zahlen herumgeschleudert, ohne zu wissen, ob das nötig ist. Es gibt da einen schönen Satz: „So genau wie nötig und so weit wie möglich“ "weit" steht hier für breit
Hoppla, wenn ich mir den Link anschaue, dann gehts hier um hochpräzise und hochdynamische Messungen an verschiedenen Stellen in einem Antriebsstrang (oder Turbine?) um anhand der Phasendifferenz Schwingungen und hier speziell ungewollte Resonanzschwingungen zu ermitteln. Anpruchsvoll aber interessant!
Udo R. S. schrieb: > Hoppla, wenn ich mir den Link anschaue, dann gehts hier um hochpräzise > und hochdynamische Messungen an verschiedenen Stellen in einem > Antriebsstrang (oder Turbine?) um anhand der Phasendifferenz > Schwingungen und hier speziell ungewollte Resonanzschwingungen zu > ermitteln. > Anpruchsvoll aber interessant! Ja mit solchen Systemen arbeitet die Firma schon, das war nur zur Demo. Genau diese hohe Präzision erwarten die von mir, um diese auch in meinem Fall zu erreichen. Noch wichtig zu erwähnen, die Zähne an meinem Rad schwanken nicht und sind somit starr.
Udo R. S. schrieb: > Hoppla, wenn ich mir den Link anschaue, dann gehts hier um hochpräzise > und hochdynamische Messungen an verschiedenen Stellen in einem > Antriebsstrang (oder Turbine?) um anhand der Phasendifferenz > Schwingungen und hier speziell ungewollte Resonanzschwingungen zu > ermitteln. > Anpruchsvoll aber interessant! Leider kann ich die Seite nicht aufrufen. Komischerweise bekomme ich auch keine Verbindung zu www.agilismeasurementsystems.com. Aber ich denke, das wird eine "schöne" Diplomarbeit :-)
Soll das sowas werden?: Hier werden Montage- und Teilungsfehler des Geberrads gemessen und kompensiert. http://www.iav.com/_downloads/de/techn_veroeffentlichungen/Komp_Geberradfeh.pdf
Hallo, Egal ob die Zähne spitz sind oder nicht, dann muss trotzdem der Abstand zueinander sehr genau und magnetisch/wirbelstrommässig das Material auch sehr gleichförmig sein, da darf auch nichts im Takt wackeln zwischen Sensorrad und Sensor. Trotzdem ist es für die Drehzahlmessung selbst die konstante Verzögerung unwesentlich, nur die Ungleichförmigkeit dieser Verzögerung erzeugt einen Fehler von maximal 0.0036 Grad zwischen 2 Zähnen. Bei 10000 U/min eben 1/3 von dem Fehler, wie bei 30000 U/min. @Sebastian (Gast): Dein Artikel befasst sich ja mit dem speziellen Problem der Ungleichförmigkeit der Drehbewegung durch die Massen (oszillierende Kolben und Pleuel Ventile) und Gaskräfte bei einem Kolbenverbrennungsmotor, sodass Teilungsfehler von diesem Drehzahlfehler überlagert sind.
Guten Morgen, @Sebastian wo kann ich denn dieses Teil bestellen ausser sie aus den USA zu beordern. Die Lieferzeit ist mir wichtig. Ich wollte mal so ne kleine Schaltung aufbauen und an einem rotierenden System mit die Ausgangssignale an nem Oszi anschauen.
habe ich schon herausgefunden, auf deren Website ist eine Nummer für den deutschen Distributor.
Beide IC's gibt es bei Digikey. Farnell hat den LM1815. Irgendwo gibt es auch Applikationsschaltungen für Operationsverstärker wo so eine Schaltung diskret aufgebaut ist. Ich habe das aber leider nicht wiedergefunden.
Hallo, ich bins nochmal nach etwas langer zeit. Nun der aktuelle Stand meiner DA: ich habe mir den Bauteil MAX9926 mit dem Evaluierungskit bestellt. In dem Datenblatt steht: "The interface circuit provides a gain of 1 and can evaluate differential sensor signal amplitudes of 50mVp-p to 300Vp-p with a 5Hz to 25kHz frequency range" habe ich denn richtig verstanden, dass mein eingespeistes signal bis zu 300 Volt Spitze-Spitze haben kann. Wenn ja, dann brauche ich den eigentlich geplanten Spannungsregler nicht, oder? -> Beitrag "Spannungsregler für Sinussignal" Eine wichtige Frage hab ich noch. Bei Digikey.de unter produktkatalog konnte ich folgenden produktfilter finden: http://search.digikey.com/scripts/DkSearch/dksus.dll?Cat=2556109 Bei 16/32 Bit µC konnte man welche auswählen (bestellen) die eine Taktrate von bis zu 400 MHz haben. Momentan bin ich beim aussuchen des µC. Ich hoffe ihr könnt mir helfen. Für Fragen oder nähere Informationen bin ich offen. Gruß Koray
Nur eine Frage, da ich erst jetzt darauf gestoßen bin: Gemessen wird die Drehzahl eines Zahnrades dadurch, daß TTL Pulse erzeugt werden, sobald ein Zahn den Mess Sensor passiert. Und zwar sollen diese Pulse einen maximalen Jitter von 25 ns bei 30 kHz haben? Wie wird die Drehzahl denn bestimmt bzw. wie hoch ist die Aktualisierungsrate? Ich mein ich würde ja ganz naiv sagen man zählt x Zähne/Pulse und berechnet dann die Drehzahl. Anhand der Zeit zwischen 2 Zahndurchgängen eine Drehzahl auszurechnen erscheint mir unsinnig, denn ist der mechanische Jitter ( nenn ich mal so, man darf doch sicher keinen wirklich gleichen Zahnabstand annehmen) durch die Fertigung wesentlich größer? Was genau bedingt die Anforderung an die 25 ns Jitter zwischen 2 Zähnen? Ich habe das Gefühl alle verstehen worum es geht und ich steh noch wie Hein Blöd da und sehe die Schwierigkeit gar nicht.
>Ich habe das Gefühl alle verstehen worum es geht und ich steh noch wie >Hein Blöd da und sehe die Schwierigkeit gar nicht. Sei getröstet, Du bist nicht allein. Ich habe nur verstanden, dass es ein TTL-Signal gibt. Wieso, weshalb, warum, er läßt uns alle dumm.
AHA! Anderen thread gefunden, es geht darum, eine GANZE Umdrehung mit 25 ns genauigkeit zu erfassen und nicht die Zeit zwischen 2 Zähnen. Richtig?
Christoph schrieb: > AHA! Anderen thread gefunden, es geht darum, eine GANZE Umdrehung mit 25 > ns genauigkeit zu erfassen und nicht die Zeit zwischen 2 Zähnen. > Richtig? so wie ich das sehe: Genau darauf läuft es letzten Endes hinaus.
Wir sollten uns, auch im Interesse des Fragestellers, aber darauf einigen, welcher Thread weiter geführt wird. Beitrag "µC Wahl für meine Dipmlomarbeit"
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.