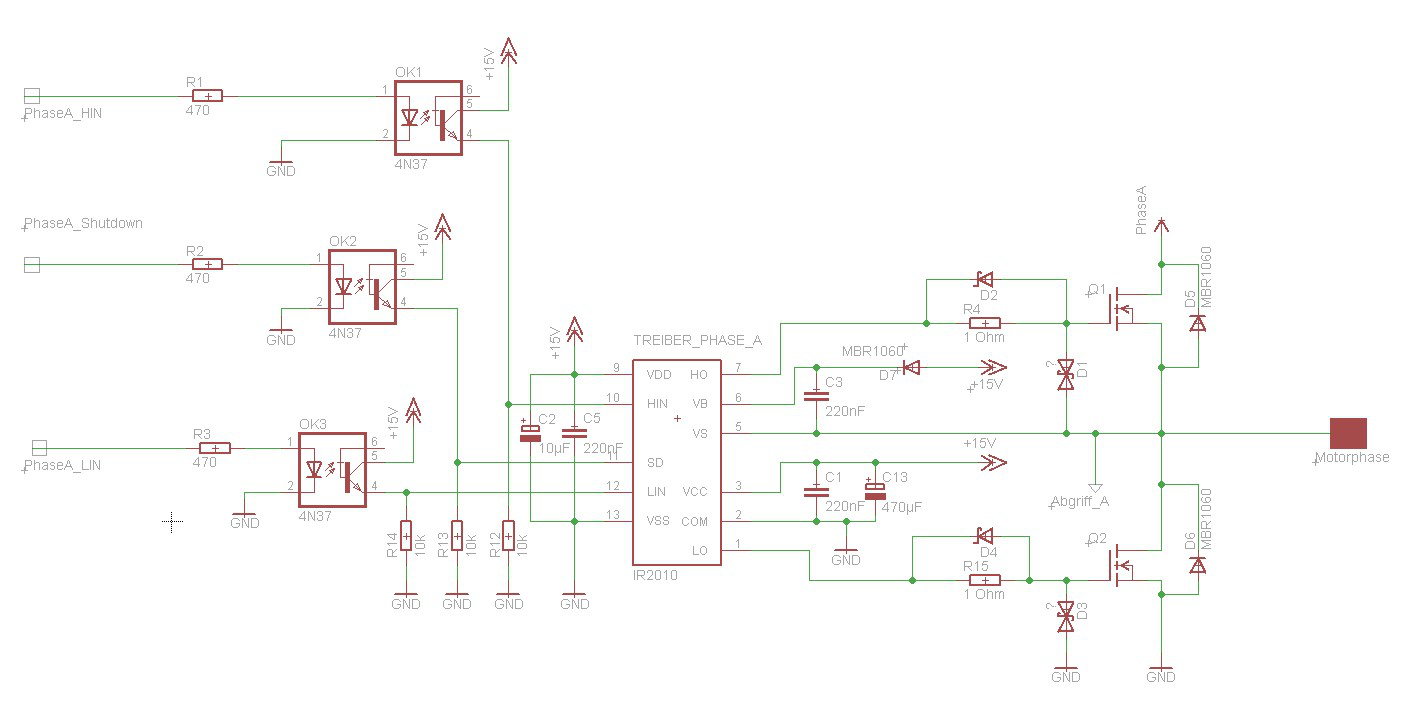
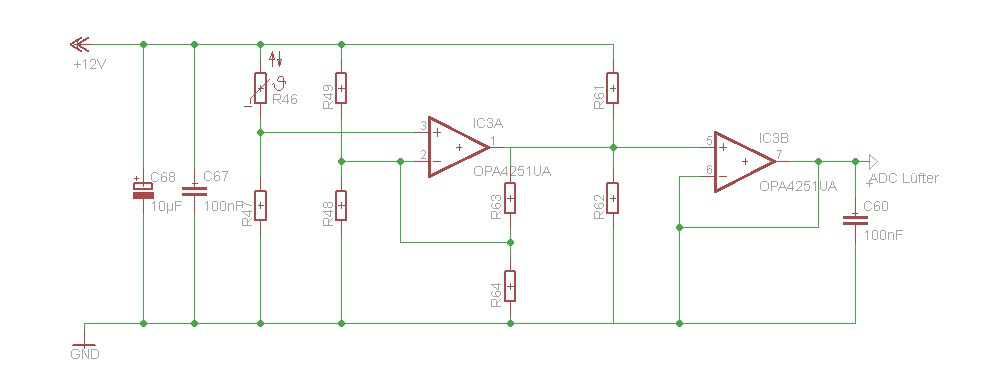
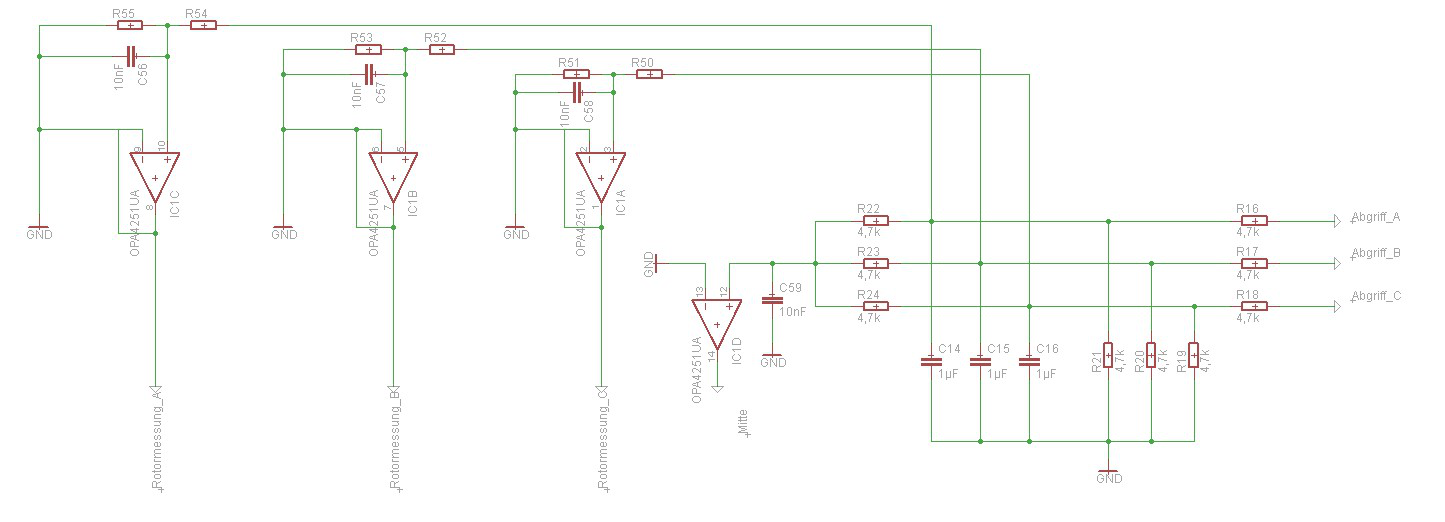
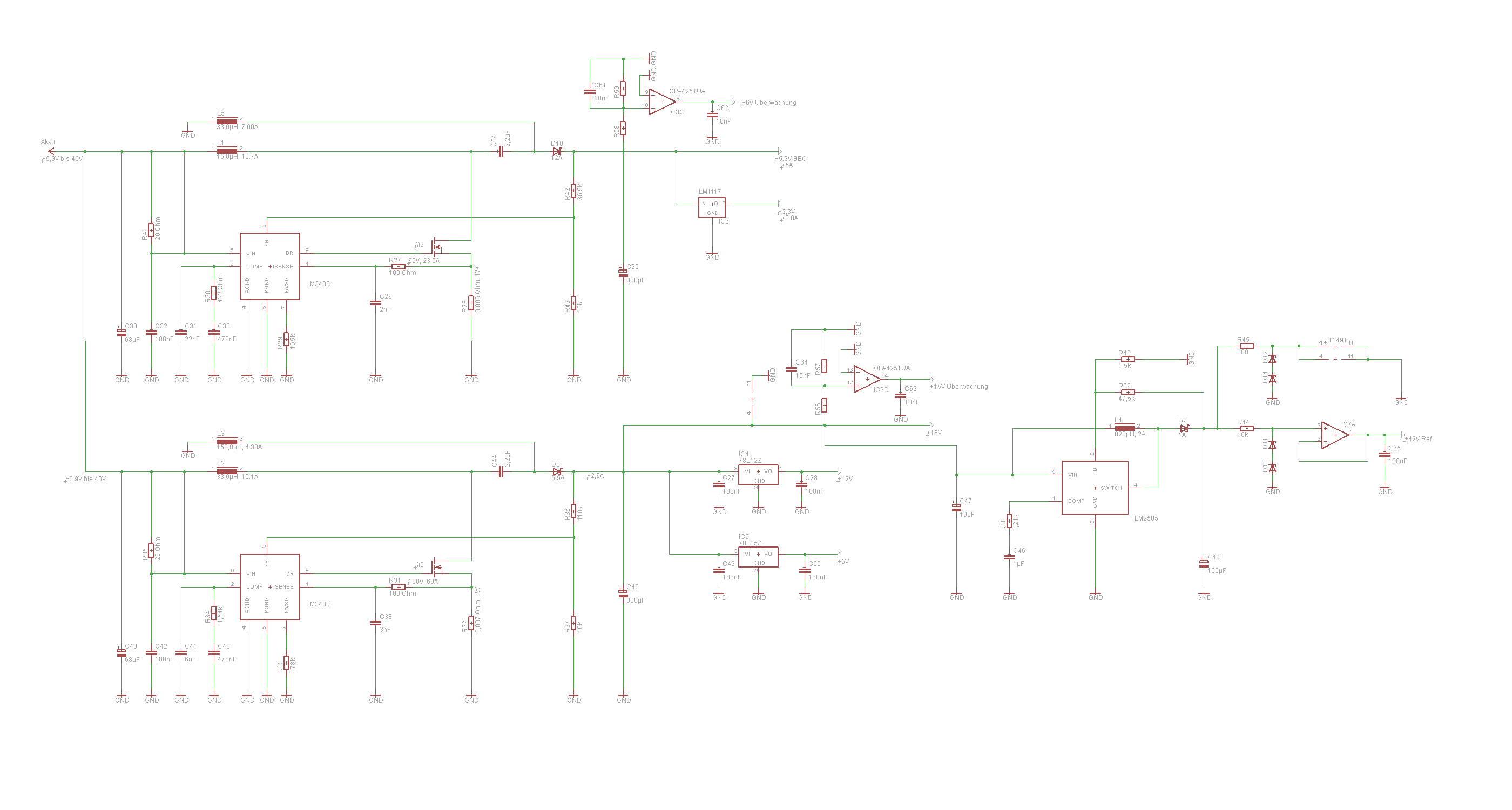
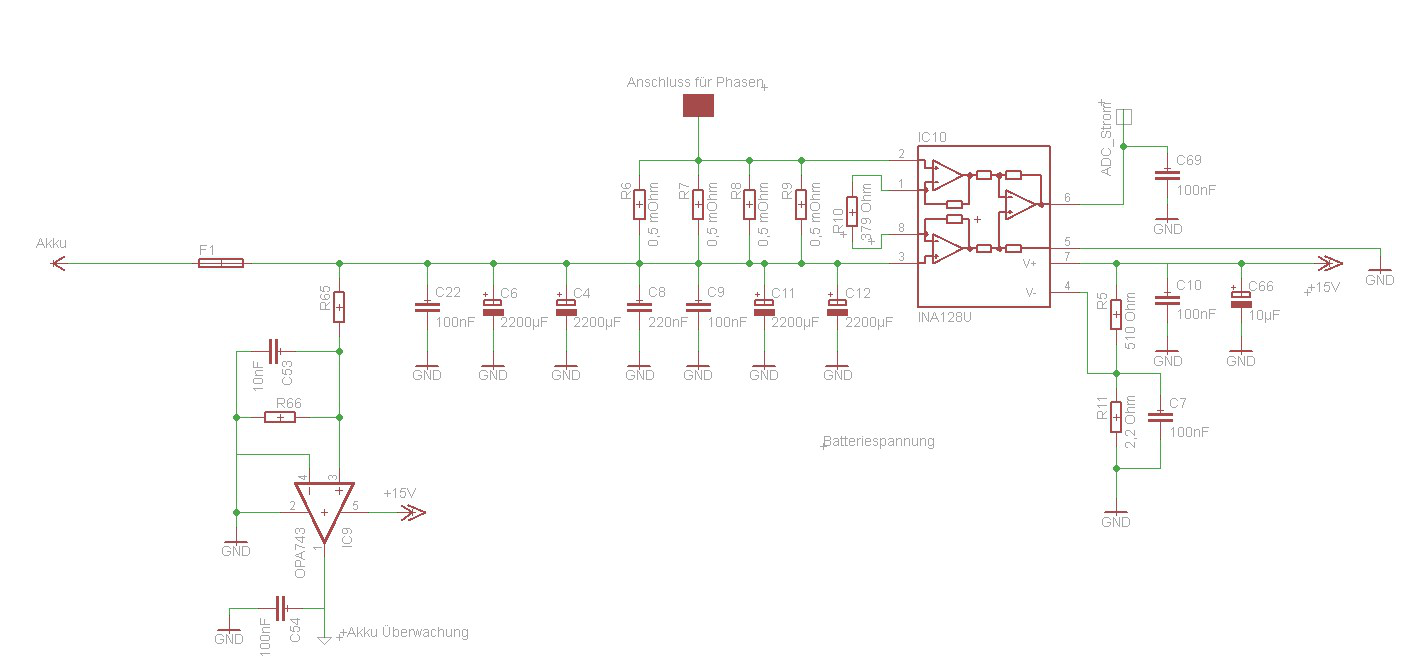
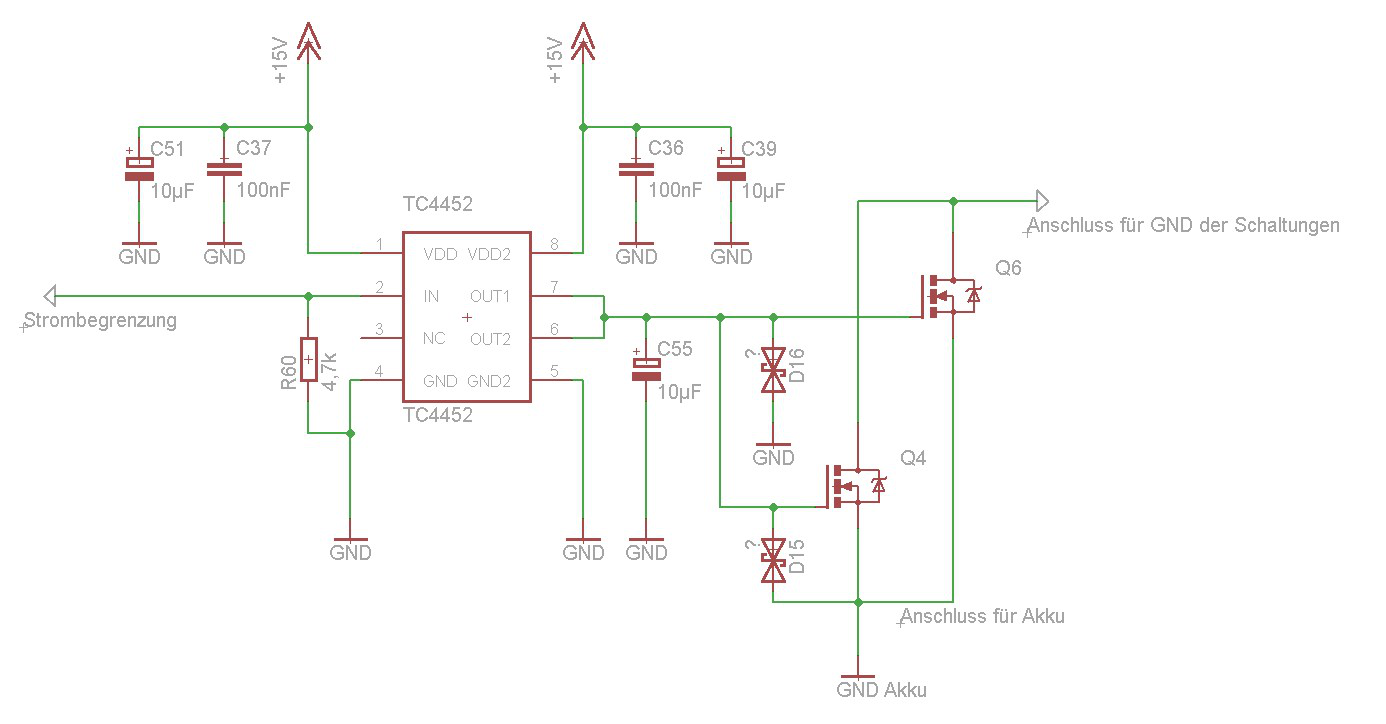
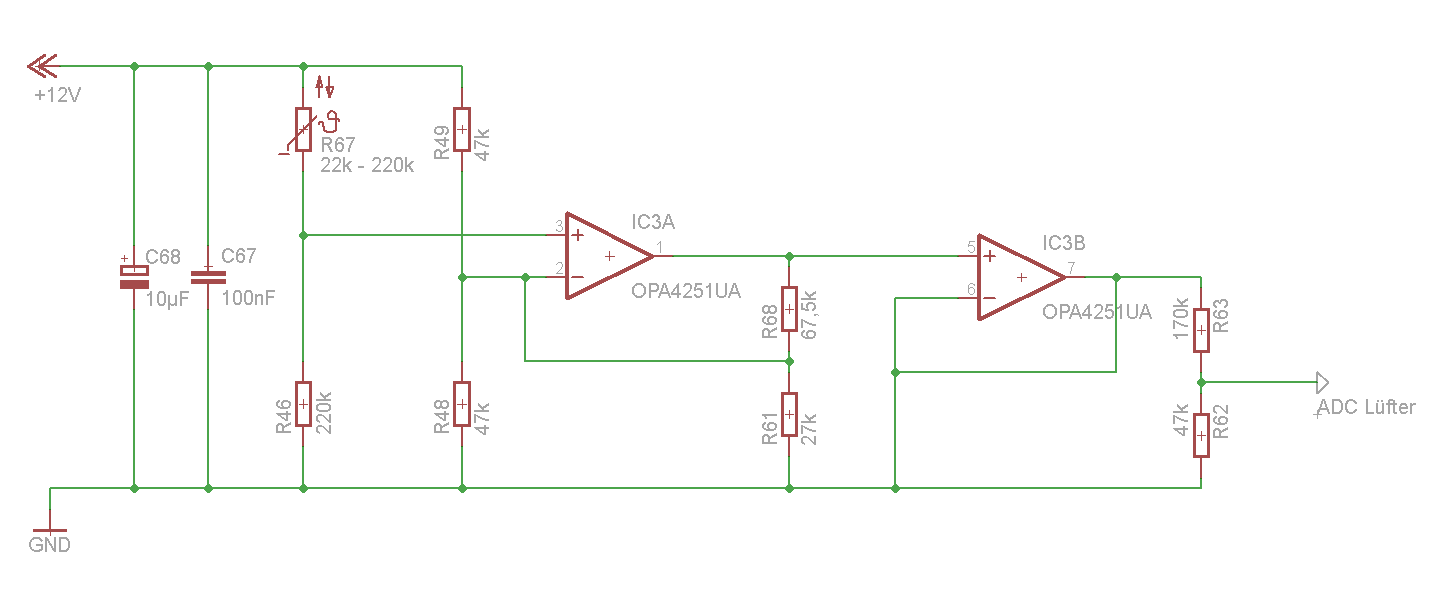
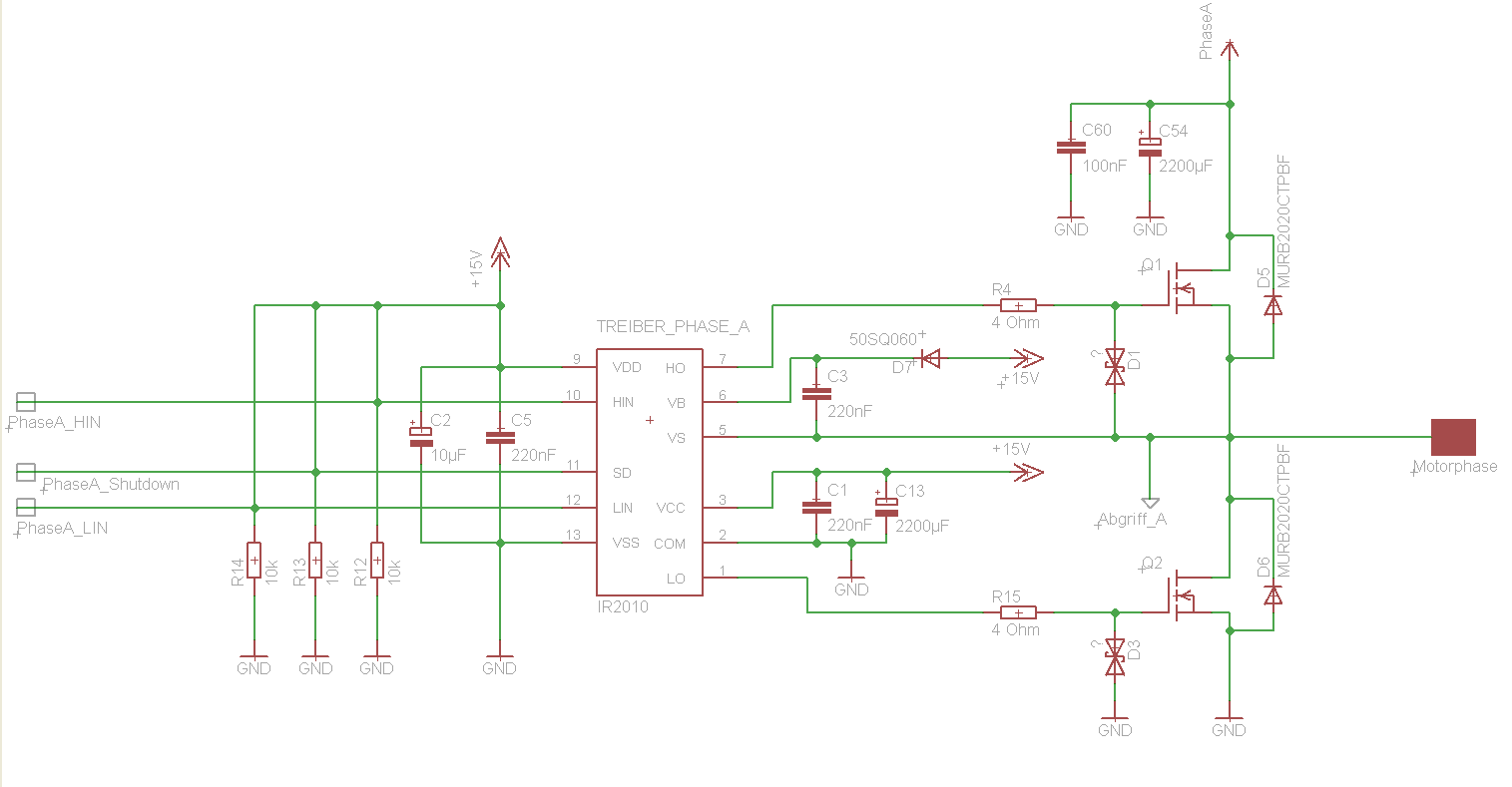
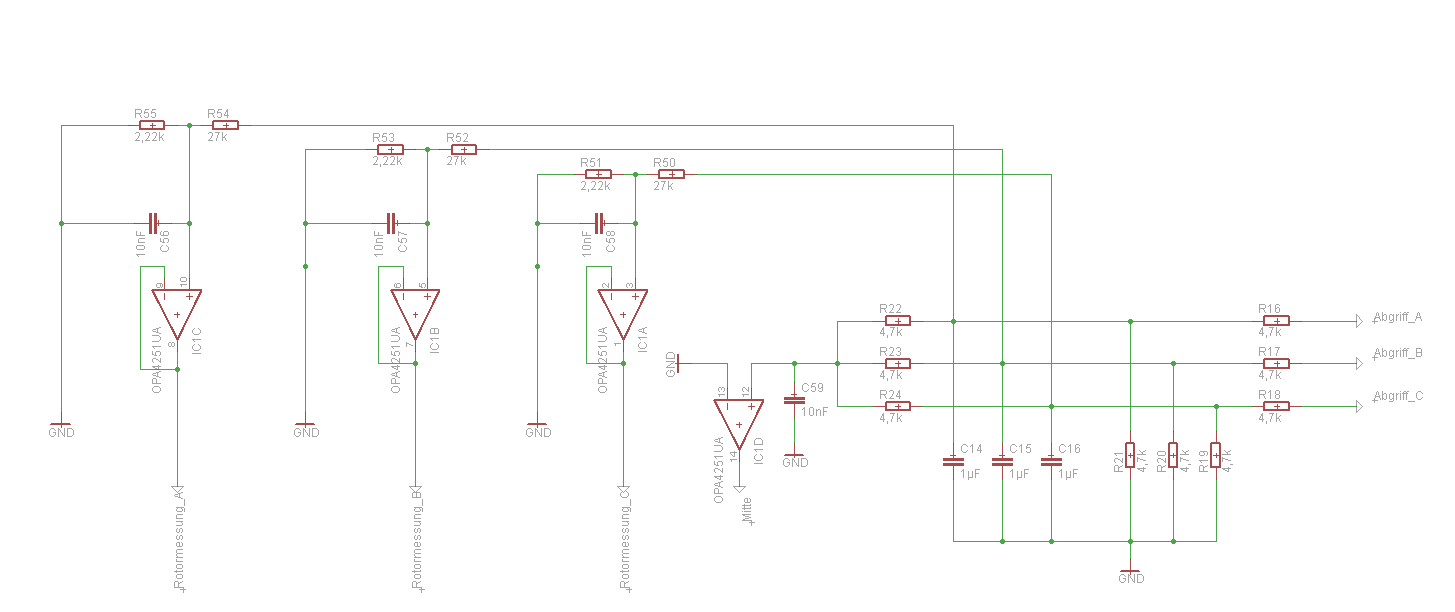
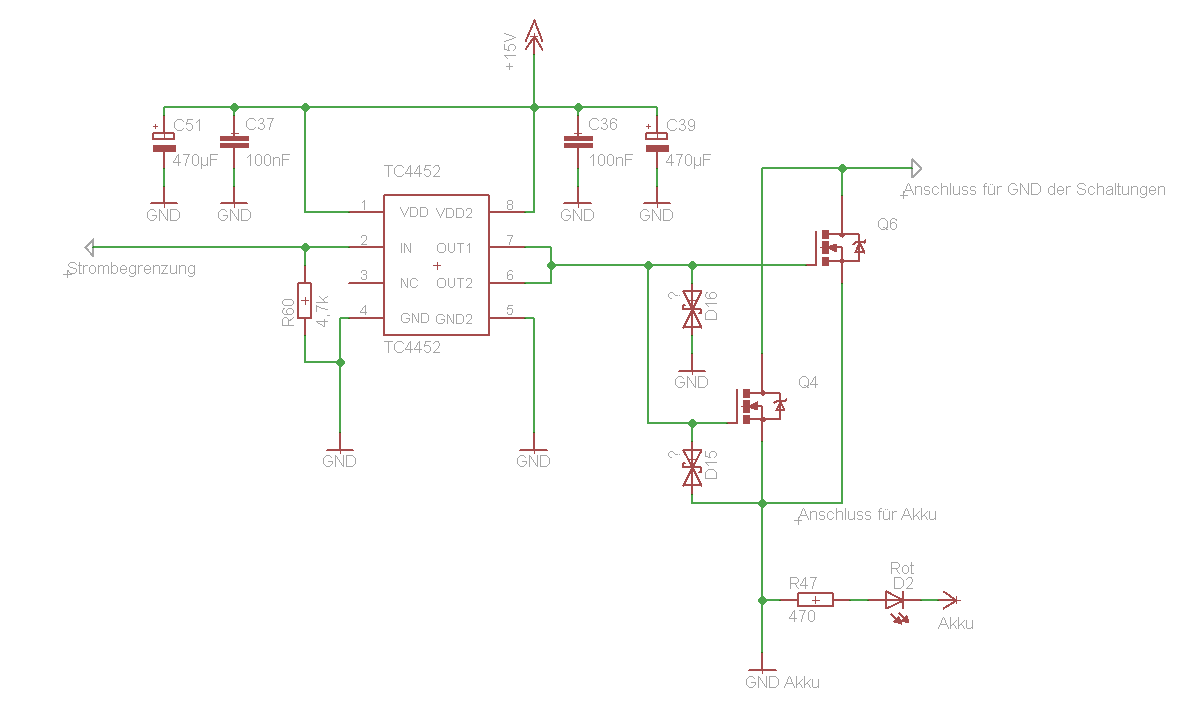
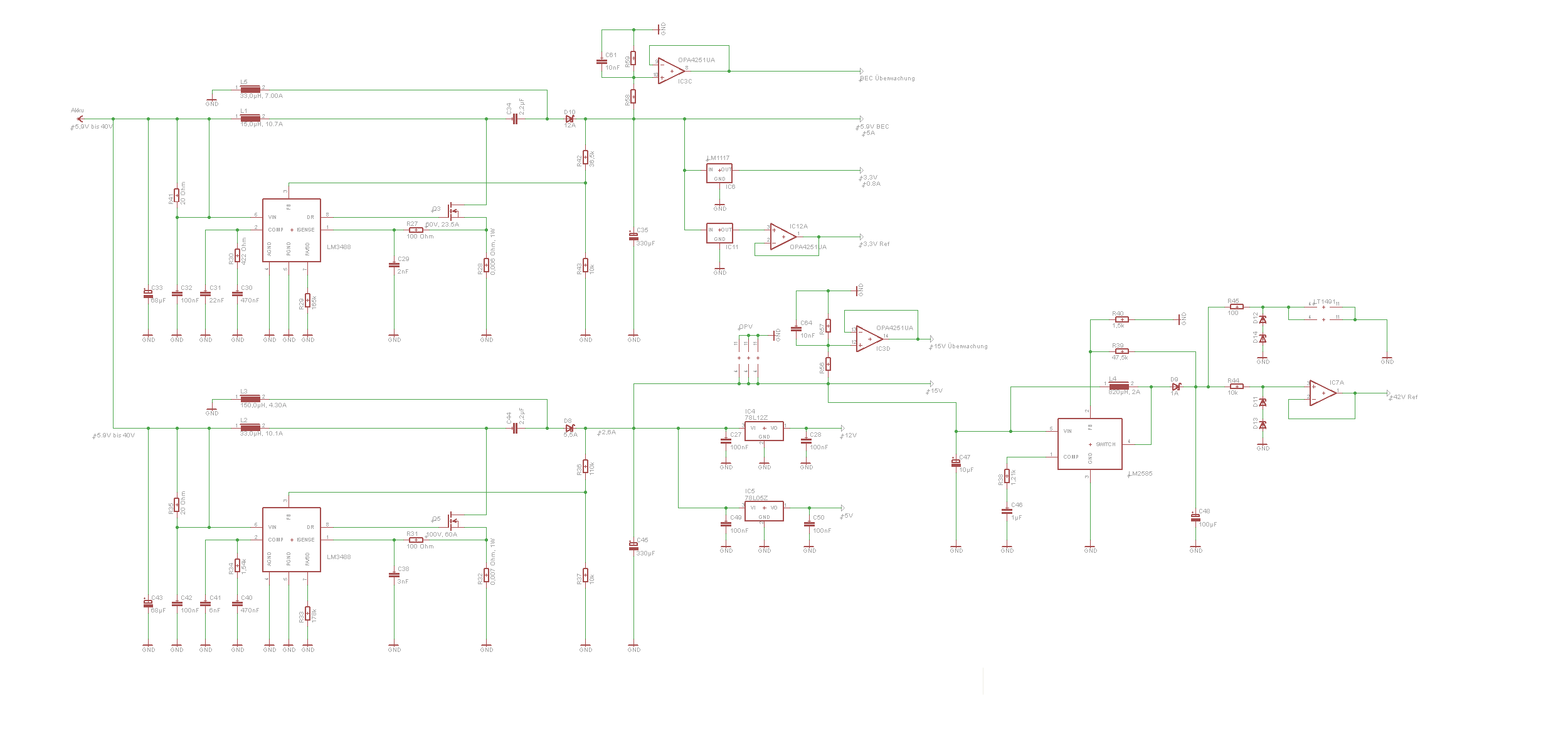
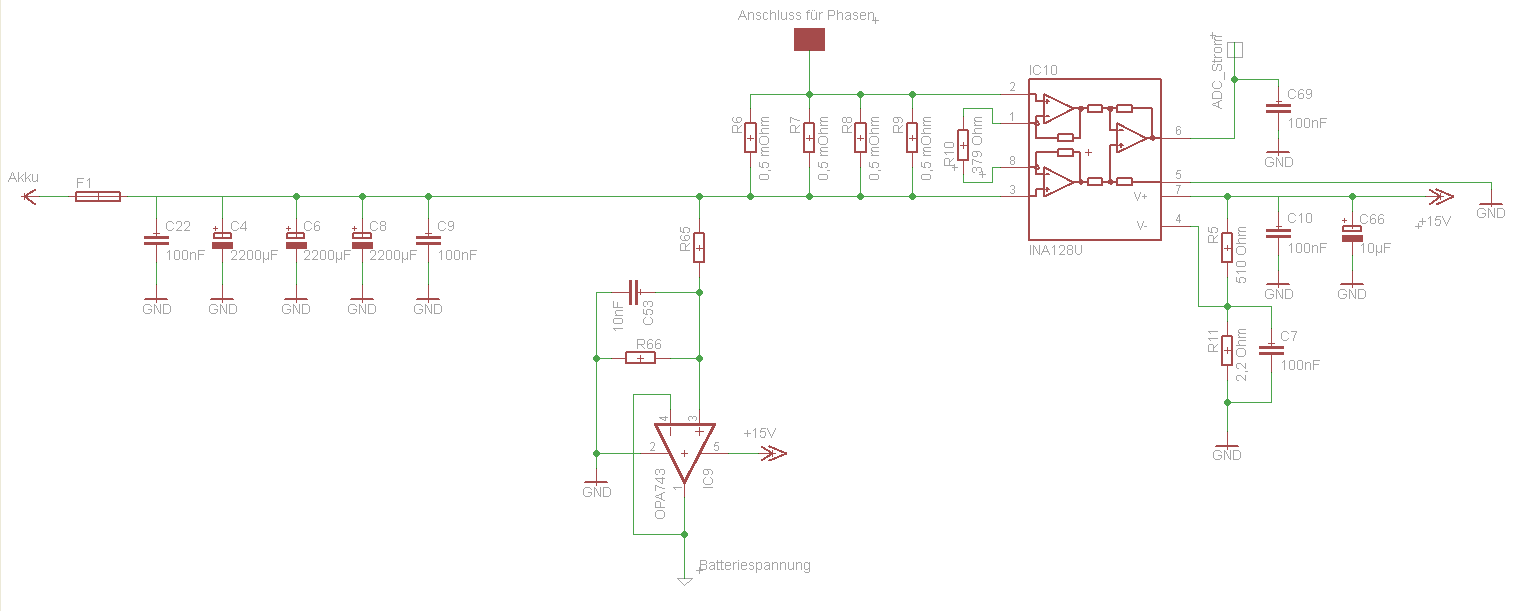
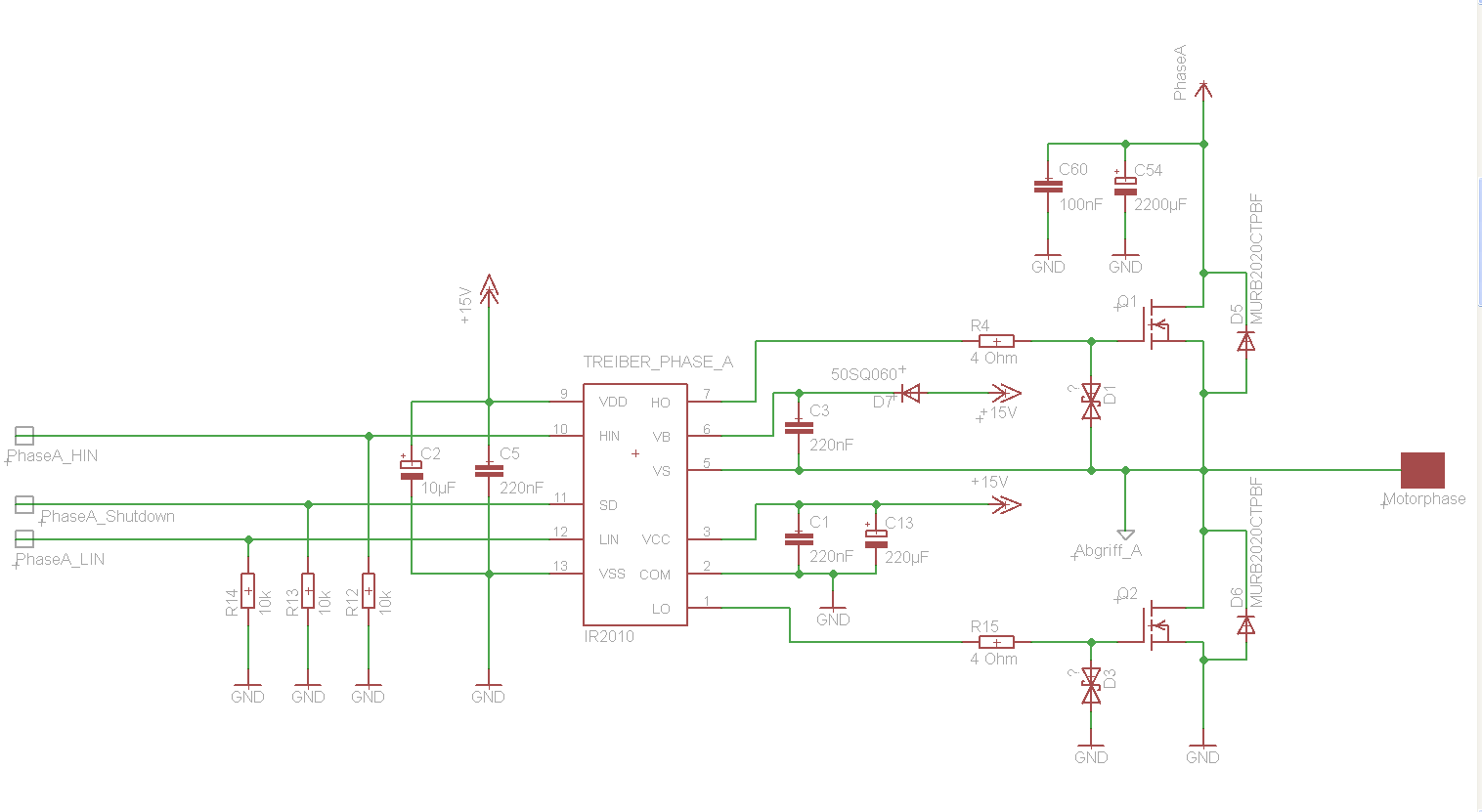
Ich hab an meinem Regler nach langer Zeit weitergemacht. Zuerstmal zu der Spannungsversorgung, die von 2 LiPo Zellen oder 6 NimH Zellen bis zu 10 LiPo Zellen gehen soll. Die LiPo Ladeschlusspannung liegt ja bei etwa 4,2V, also muss ich maximal 42V wandeln können. Ich hab mich jetzt für 2 LM3488 entschieden, der eine regelt auf 5.9V für das BEC. Mithilfe eines Low Drop Reglers entstehen aus den 6V noch die 3,3V für den Betrieb eines dsPICs. Der andere LM3488 regelt von maximal 42V auf 15V runter, für die Versorgung der Gates. Über einen 7805 und einen 7812 generiere ich die +12V, die ich für Lüfter verwenden möchte und die +5V. 5V hab ich jetzt einfach mal entschieden, dass es in den Regler kommen soll. Damit hab ich aber noch nichts näheres vor. Das BEC muss 5A schaffen, für die +15V benötige ich mindestens 2,5A Dann hab ich nen Verpolungsschutz mit N-Kanal MOSFETs entworfen mit dem es auch möglich sein soll im Falle des Falles alles auf einmal abzuschalten. Deshalb soll ein TC4452 die beiden parallelen MOSFETs treiben. Falls man den Regler verkehrt herum an den Akku ansteckt, schalten die beiden MOSFETs nicht durch und die Schaltung ist stromlos, so jedenfalls mein Plan. Ich hab nur angst, dass dann der ganze Strom über die in den MOSFETs befindlichen Dioden fließt und damit alles wirkungslos macht, würde wohl passieren ? Das Problem, ich finde keine MOSFETs mit nem Rdson von maximal 1 mOhm, die ohne so ne beschissene Diode sind und so 200A aushalten. Ich hab aber auch schon über N-Kanal MOSFETs in der Highside nachgedacht, +40V generiere ich mit einem Schaltregler, von dem her könnte ich ihn auch dort durchschalten. Um Die Spannungen an den Schaltreglern zu messen, bringe ich sie mit Spannungsteilern auf die 3,3V des PICs. Dahinter hab ich immer einen Impedanzwandler gehängt um zu verhindern, dass ich den Spannungsteiler belaste und dadurch das Ergebnis verfälsche. Der Strom wird über einen INA128 gemessen, der den super geringen Spannungsabfall am 0,125 mOhm Shunt um den Faktor 132 verstärkt und an einen ADC weitergibt. Ich bin mir aber nicht sicher ob die Kondensatoren an den Impedanzwandler und am Spannungsteiler überhaupt benötigt werden. Der optionale Lüfter soll Temperaturgesteuert werden, daher hab ich mir gedacht, ich nehme eine Vollbrücke mit einem NTC, schließe das ganze an einen Nichtinventierenden Verstärker an, setze dahinter einen Spannungsteiler wegen den 3,3V des dsPIC und klemme einen Impedanzwandler dahinter. Das Signal soll dann zu einem AD Wandler im dsPIC gehen und einen PWM Ausgang steuern. Die Lageerkennung ist eine Schaltung die ich schon häufiger gesehen hab. Der Sternpunkt soll an einen Komperatur angeschlossen werden, über Spannungsteiler und Impedanzwandler werden die induzierten Spannungen gemessen. Als MOSFET Treiber für die 3 High und Lowside´s dient ein IR2010. Die Gates der MOSFETs werden alle durch Suppressordioden geschützt. Geschalten wird über Optokoppler Für Verbesserungsvorschläge wäre ich sehr sehr dankbar liebe Grüße Modellfreak
Angehängte Dateien:
-

IR2010.png
270 KB -

LueftersteuerungMesswertgeber.png
97 KB -

RotorLageerkennung.png
170 KB -

Schaltregler.png
36 KB -

Strom_Akkuspannung.png
230 KB -

Verpolungsschutz.png
190 KB
Dein Verpolungsschutz bringt so nichts. Bei Verpolung fliesst der Strom durch die Bodydioden der FETs = Kurzschluss. Wozu die Optokoppler? Die Motorsannungsversorgung der Brücke sollte auf jeden Fall mit einem (oder mehreren parallell) impulsfesten Elko abgeblockt werden. Den Rest habe ich mir noch nicht näher angesehen.
Das ist ja ein RIESEN Aufwand, nur um einen BLDC steuern zu wollen! Wofür die ganzen Operationsverstärker an der BEMF-Erkennung? Und warum hängst du HINTER einen MOSFET Treiber einen 10µF Kondensator? Oder 100nF parallel zu einer Kurzschlussbrücke direkt an einen OPAMP Ausgang? Oh weia, oh weia, PS: Es gibt keine MOSFETs ohne "beschissene" Diode. Lies dir doch erst mal Grundlagen an.
ja ich weiß, es ist ein heftiger aufwand, aber ich will halt gerne alles steuern und auch überwachen können. Die Operationsverstärker sind dafür da um die Spannungsteiler nicht zu belasten. Ich habs halt schon häufig gesehen, dass OPs in Reihe geschalten werden, daher hab ichs auch gemacht, zumindest wüsste ich nicht was des großartig für nachteile haben soll, außer mehr platzbedarf und maginal höheren stromverbrauch. Des mit den 100nF und 10nF an den ausgängen war allerdings ne dummheit, wenn sich das Eingangssignal schnell ändert hab ich da mehr oder weniger einen kurzschluss, also einen Tiefpass, was ich ja eigentlich nicht will oder lieg ich falsch, würde sich doch als tiefpass auswirken ? Der C55 gehört weg, 100% zustimm, da hat ein 10µF Kondensator nichts zu suchen. Zum Verpolungsschutz, im Prinzip isses immer das selbe, sobald eine Diode im MOSFET integriert ist kann mans auf so ne Art vergessen, eigentlich bräucht ich sowas ja eigentlich nicht, ich pass schon auf wo ich etwas anschließe, aber wäre halt super, wenn einer drinne wäre. Ne Schmelzsicherung ist mir zu unsicher, da geht zu viel kaputt. Ein Relais ist für die Ströme zu groß und wenn ich ehrlich bin auch fast zu teuer, zumindest die typen die ich gesehen hab. Die Idee mit den MOSFETs kam mir halt, wegen nem super geringen Spannungsabfall, des muss doch irgendwie machbar sein, auch für solche Ströme. Eine einfache Shotky Diode kann ich definitiv vergessen. Was haltet ihr eigentlich von meiner Lüftersteuerung ?
Hi! Ich bin auch der Meinung, dass du zu umständlich denkst. Die meisten kleineren BLDC´s haben Hallsensoren mit denen die Lageerkennung möglich ist. Man kann auch einen drehencoder verwenden(besonders bei Raumzeigermodulation geeigenet) oder den Motorphasenstrom zweier Phasen subtrahieren. Es kommt halt auch drauf an mit welchen verfahren du den Motor ansteuern willst...Blockkommutiert, Raumzeigermodulation, Sinus-Dreieck-Modulation... Wenn du sowieso einen Sinus verwendest Dreht sich dein Motor mit n = f/p, also du kannst auch Sensorlos fahren. Interessant ist eher der Lastwinkel zwischen Feld und Läufer. Ich würde dir empfehlen einige Evaluationboard Schaltpläne anzuschauen-> http://www.hitex.com/fileadmin/free/examples/lpc/lpc29xx-motor-control-board/nxp_bldc_content.zip Konkret: Also den Treiber mit Optokopplern anzusteuern ist quatsch...du kannst sogar direkt den Logikpegel des uC nutzen (Vdd -> 3V3). Als verpolschutz tuts in den meisten fällen auch eine Diode? Du musst den Zwischenkreis(hier nur Netz Phase A????) mit ordentlichen Elkos puffern. Die Diode über dem 1Ohm Gate Widerstand macht keinen Sinn und der Widerstand kann ruhig ein bisschen größer sein. Als Bootstrap-Kondensatoren sind am besten mehrere Keramik parallel von klein zu groß zu schalten
ja ne Sinus kommutierung war mal das Ziel, ebenso Sensorloses steuern Ich wollt halt die induzierten spannungen durch die Spulen messen und dadurch die rotor position zu bestimmen, aber, wenn des nicht gerade ideal ist, ich machs gerne anderst, wenns einfacher geht bei dem Treiber reichen zumindest laut Datenblatt die 3,3V nicht, jedenfalls, wenn ichs richtig verstanden hab brauchst du über 9,5V bei ner 15V Versorgung. Für ne Diode sind die Ströme zu hoch und 0,3V find ich, wenn ich ehrlich bin, auch zu viel des guten. Die von Graupner, LRP oder sonst was müssen doch auch ne Lösung für das problem mit der verpolung gefunden haben, da kann eigentlich keine Diode drinne sein, zumindest sind Shotky Dioden für 80A ziemlich fett. Was genau meinst du mit zwischenkeis ? Des mit den Bootstrapkondensatoren ist auch so ne Sache, viele sagen, ich soll nur 220nF nehmen, der nächste meint, viel zu wenig, was denn nun ? Des mit der Diode parallel zum Widerstand ist klar, dass es net viel bringt, nen Deadtimeersatz brauch ich eigentlich nicht. Wird die EMV durch die Gate Widerstände eigentlich wirklich viel besser ? Also so nachdem Motto Abschlusswiderstände an leitungen ?
Man kann einen MosFet auch invers betreiben, also Drain und Source vertauscht. Damit ist die Bodydiode in Sperrichtung bei Verpolung. Das Teil sitzt meist in der Highside da oftmals -U auf Grund weiterer Schaltungsteile an Masse liegen muss. Die Ansteuerung (Gate muss ja positiv gegen Source sein) macht man zB. mit einem Photovoltaic Optokoppler.
Hi Also die meisten käuflichen Regler haben keinen Verpolungsschutz. Eine Verpolung sollte man durch die Stecker vermeiden ansonsten gibt es kurz Rauchsignale... Meinem Gefühl nach sind C14, C15 und C16 etwas groß....
Verpolschutz mit kleinem Spannungsabfall wurde hier schon tausend mal besprochen, unter anderem hier: Beitrag "Re: Verpolungsschutz mit kleinem Spannungsabfahl"
Die Idee hinter meiner Schaltung war eigentlich folgende Zuerst würde ja der Strom über die Diode fließen, dann ab einem gewissen Punkt fällt an dieser soviel Spannung ab, dass der MOSFET durchschaltet und so die Diode überbrückt ? Was soll an meiner Schaltung anderst sein, als die von dene in dem Thread ? Angenommen ich drehe sie um, dann hab ich doch das Verhalten jedes mal beim korrekten anschließen des Akkus ? Aber, dass die "Schutzdiode" beim Herstellen des MOSFET automatisch entsteht hab ich nicht gewusst
jep, deshalb hab ich auch die Schaltung für die Lageerkennung so gemacht^^
kennst du auch schon die BL-Regler Projekte aus dem Rc Modellbaubereich (Helicopter, Flugzeuge, X-Copter)? Dort wurde schon sehr viel gemacht und realisiert. Aus dem Kopf fallen mir die Stichworte Quax, SBL, Nano-Floh ein. Wenn du da googlest findest du einiges was helfen möge. Wenn es dir "nur" um die SW geht und die Möglichkeit alles selber zu steuetrn/regeln/messen, dann könntest du auch einen fertigen kommerziellen Regler nehmen und nur den uC umproggen. Wurde auch schon oft gemacht (und ist vermutlich die billigste Variante).
mir gehts nicht ums Geld, ich will halt einfach mal sowas bauen. Tut mir leid, wenn ich euch auf die Nerven gehe :D Die Software schreib ich auch selber
Angehängte Dateien:
-

IR2010V2.png
250 KB -

LueftersteuerungMesswertgeber2.png
120 KB
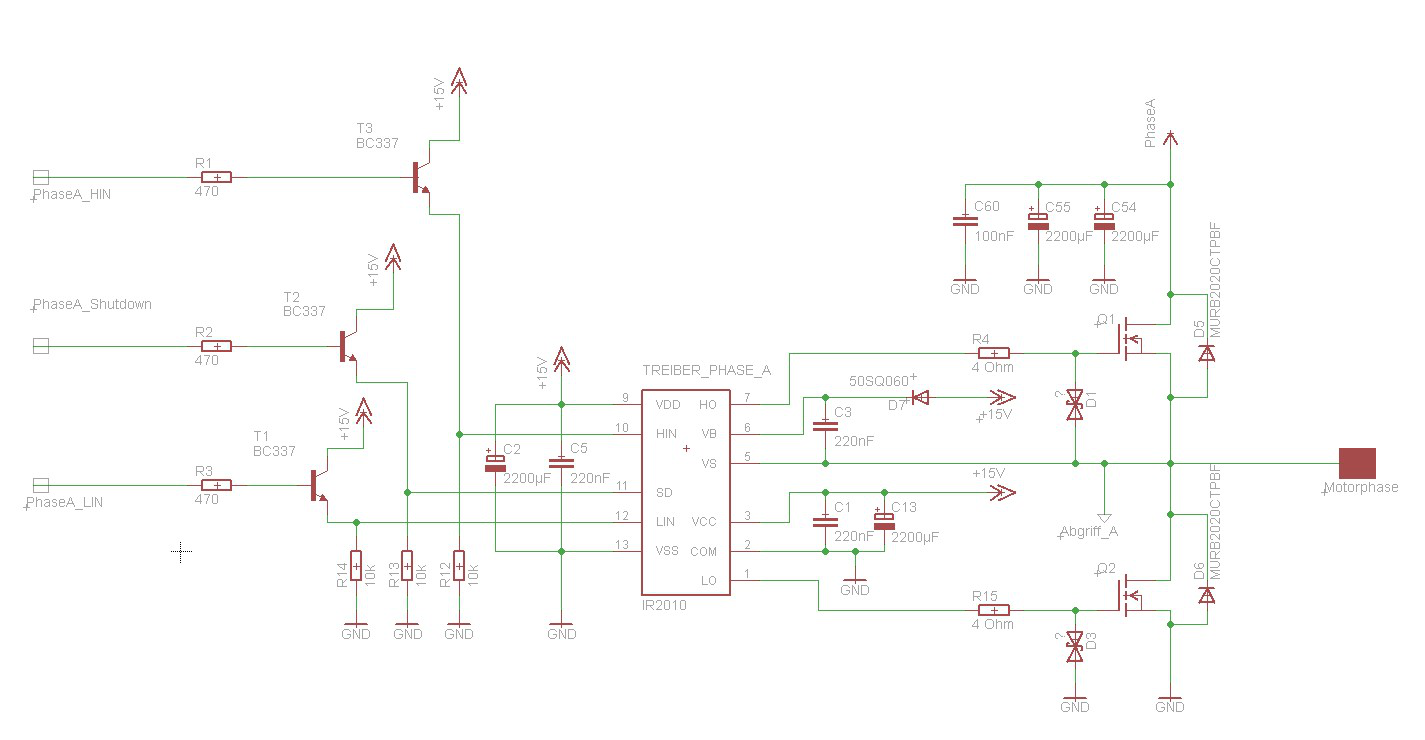
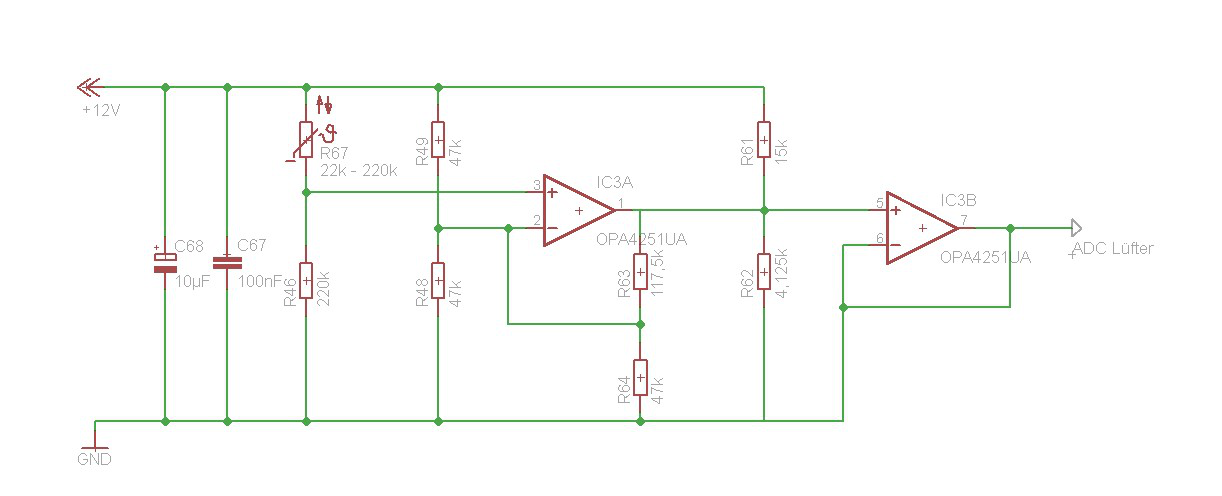
Ich glaub ich fang mit dem Verbessern bei den Treibern an, Schritt für Schritt Ich hab jetzt beim IR2010 die Optokoppler durch BC337 ersetzt. Zusätzlich hab ich an dem Eingang des Treibers 2 mal 2200µF Elkos und einen 100nF Keramik parallel gehängt, damit die auch noch extra gestützt werden. Die Dioden für den deadtime ersatz hab ich rausgenommen und die Widerstände auf 4 Ohm erhöht. Freilaufdioden durch dickere ersetzt, die D7 durch ne 5A Diode ersetzt Die Widerstände sind als Art Abschlusswiderstände zu verstehen ? Bei meiner Auswertungsschaltung für den Lüfter hab ich jetzt mal die Werte eingetragen und den 100nF am Ausgang des Impedanzwandlers entfernt. Ich will einen NTC mit 220k verwenden, der bei 85°C nur noch 22k hat. Der nicht inventierende verstärker verstärkt das Signal um den Faktor 2,5. bei 85°C heißt das also, dass an R46 10,8V abfallen. Am inventierenden Eingang des OP liegen +6V bezogen auf Masse, also hab ich 4,8V Unterschied, die dann um den Faktor 2,5 auf +12V vergrößert werden. Danach kommt der Spannungsteiler der mir das auf 3,3V herabsetzt, der OP dient wieder dazu um den Spannungsteiler nicht zu belasten Änderungsvorschläge zu den Treibern ? soll ich die Lüftersteuerung vereinfachen ?, anderst bauen ? Grüße
Mit den Transistoren kann es so wie gezeichnet nicht gehen, die Transistoren können nicht durchschalten. Ausserden sind die unnötig da der IR2010 3,3V Logic compatible ist, sofern das Datenblatt nicht lügt. R61 und R62 machen keinen Sinn und der nachgeschaltete Spannungsfolger ist überflüssig da der nachfolgende Eingang (Controller-ADC) sicherlich hochohmig genug ist um den OPV nicht zu belasten.
Uff, sehe jetzt erst das die OPV Schaltung mehr einem Komparator als einen Verstärker ähnelt. R48 und R64 liegen paralell und ergeben so einen Wert von 23,5k. Und wie gesagt R61/62 halten die Spannung auf einen Wert fest und müssen weg. Wozu einen teueren OPA wenn es ein LM321 oä. auch tut. Wurde schon gesagt, Du solltest Dich erst einmal mit den Grundlagen der Schaltungstechnik befassen.
Angehängte Dateien:

was haltet ihr von 2 invertern hintereinander, also so wie beim addierer ?
nichts, ein NIV mit rchtig dimensionierter Verstärkung (ggf mit Trimmer einstellbar) reicht. Am ADC-Controllereingang reicht für Lüftersteuerung ausreichende Genauigkeit auch ein Spannungsteiler NTC und Widerstand aus.
Angehängte Dateien:
Ich dachte mit nem NIV könnte man keine Verstärkung unter 1 machen, zumindest würds mich wundern, wenns geht. Also muss ich erstmal die maximal 4,8V auf 12V verstärken und dann das mit nem Spannungsteiler auf +3,3V. Wenn ich einen Impedanzwandler aber weglasse, hab ich wieder ne parallelschaltung aus Widerstände, was nur dazu führt, dass sich das verhältnis beim NIV wieder ändert. Deshalb hab ichs jetzt mal so gezeichnet. Ich verbau nur ICs mit 4 OPs darin, zumindest fast nur, deshalb störts mich jetzt vom Platz her nicht. Ich dachte OPV in solchen Einsatzbereichen würden jetzt EMV mäßig nicht so stark rumsauen. Gibts eigentlich irgendwelche Nachteile, wenn ich OPV als Impedanzwandler hinter jeden spannungsteiler hänge ?
2200µF für den MOSFET-Treiber?! Dir ist wirklich nicht mehr zu helfen! ;-) Das ist doch Nonsense²°. 100nF reichen da dicke. Wenn du willst noch 1-10µF Elko parallel. Aber das braucht auch nur an der Hochstrom-Versorgung (Rechte Seite). Die Versorgung der linken Seite ist doch nur für die digitalen Signale. Ich weiß ehrlich gesagt nicht wo ich anfangen soll. Die zwei riesigen Schaltregler würde ich irgendwie umgehen. Die ganzen Operationsverstärker? Was soll das? Wenn du hier wenigstens direkt Komparatoren einbauen würdest, wäre der Platz eventuell noch sinnvoll genutzt. Der Plan ist irgendwie unübersichtlich. Warum hängen am Shunt-Verstärker 2200µF Kondensatoren? Klar, die hängen am Akku+, aber sollen die wirklich in die Nähe des Shunt Verstärkers? Nein. Dann zeichne sie wo anders hin. Was baust du denn da mit den Eingängen des MOSFET Treibers? Warum schließt du nicht einfach deine Mikrocontroller Signale da direkt an? (Fast) alle deine Operationsverstärker sind am Ausgang kurzgeschlossen. Und wenn du eine Sinuskommutierung machst (auf allen 3 Phasen) kannst du keine BEMF mehr auswerten. Du brauchst dann Hallgeber o.ä.
beim MOSFET Treiber belass ichs auf der linken Seite bei 10µF parallel zu 100nF. An die Hochstromversorgung auf der rechten Seite würd ich trotzdem lieber 2200µF oder wenigstens 1000µF parallel zu den 220nF hinhängen. Die Schaltregler sind relativ groß, ich brauch aber ein BEC mit 5A und eine 15V Versorgung mit etwa 2A. Ich will halt gerne an +12V noch etwas hinhängen können, die +6V sollen eigentlich nur für den Empfänger und die Servos und für den 3. Schaltkanal belegt verwendet werden. Wie kommst du auf komperatoren ? Ein Komperator nützt mir doch nichts. Die 100nF an den Ausgängen der OPs hab ich mittlerweile auch alle entfernt Mit der Sinuskommutierung muss ich dir allerdings irgendwie recht geben, du meinst praktisch immer den Strom zweier Phasen mit nem Hallsensor messen ? Die Transistoren sollten eigentlich in die Lowside runter, das mal gleich vorweg. Ich hab an die Eingänge der Treiber +15V hingesetzt, weil ich halt im Datenblatt die Zeile wos ums VIN für HIN, LIN bei VDD von 15V geht wohl falsch aufgefasst habe. Wenn ihr mir alle sagt, dass ich trotz VDD von 15V mit 3,3V die eingänge ansteuern kann, dann stell ich mich da nicht mehr in den Weg. Ich bin froh, wenn ich des mit 3,3V machen kann
> Ich dachte mit nem NIV könnte man keine Verstärkung unter 1 machen,
Geht auch nicht, nur wenn Du eine Dämpfung brauchst reicht ein
Spannungsteiler. 2OPV sind für eine einfache Temperaturmessung zur
Lüftersteuerung pure Verschwendung, besonders wenn man die Zusammenhänge
nicht ganz versteht.
Übrigens sind r48 und r61 immernoch paralelgeschaltet, ein R reicht
doch.
Angehängte Dateien:
-

IR2010V3.png
10 KB -

LueftersteuerungMesswertgeber7.png
5,7 KB -

RotorLageerkennung2.png
7,9 KB -

Verpolungsschutz2.png
7,4 KB -

SchaltreglerV2.png
30 KB -

Strom_Akkuspannung2.png
8,3 KB -

dsPIC.png
22 KB

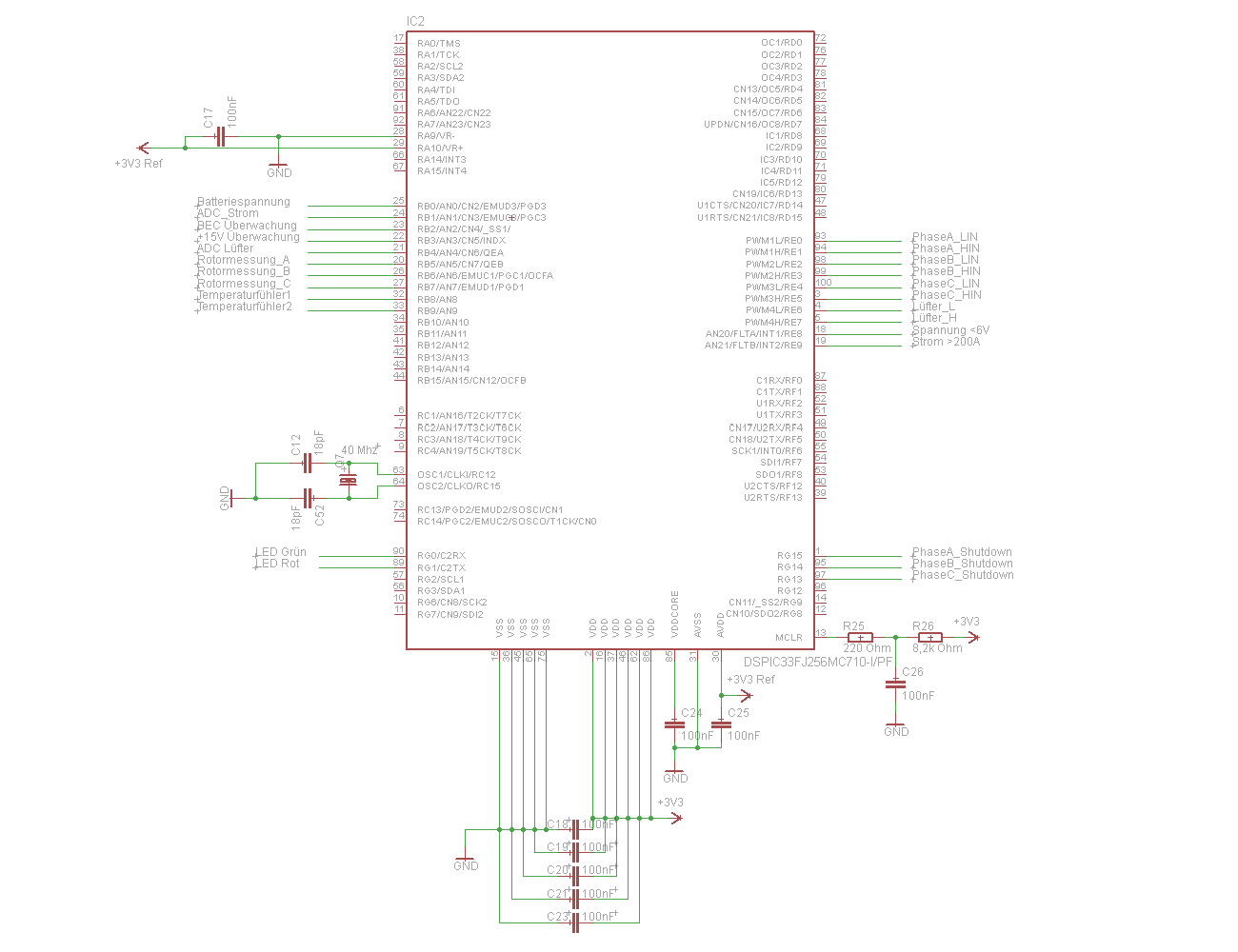
so, neue Bilder, jetzt hab ich auch gerafft, was Simon mit kurzgeschlossenen OPs gemeint hat, ich hab überall beim inventierenden Eingang jetzt des GND weg gemacht. Ich frag mich aber jetzt, was ich mit C56, C57 und C58, C61, C64 und so weiter machen soll, wobei die Schaltung wohl eh weichen wird, es sei denn, ich kann des irgendwie für die Hallsensoren nehmen. Mit hallsensoren sollte man den ganzen Strom der durch die phasen fließt messen oder reicht nur ein kleiner teil hinter einem spannungsteiler ? Lüfter: Jetzt ist R48 und R61 zu einem Widerstand geworden So siehts im Augenblick aus. Ich hab auch mal den angefangenen Teil des dsPIC 33 dazu gelegt
Modell Bauer schrieb: > beim MOSFET Treiber belass ichs auf der linken Seite bei 10µF parallel > zu 100nF. > > An die Hochstromversorgung auf der rechten Seite würd ich trotzdem > lieber 2200µF oder wenigstens 1000µF parallel zu den 220nF hinhängen. Und was soll das bringen? Du kannst 2200µF Kondensatoren an deine MOSFET-Brücke hängen, denn hier fließt der "echte" Strom (Motorstrom). Aber an dem MOSFET Treiber bringt das schlicht gar nichts. Die 2200µF sind so lahm, die zucken nicht mal, wenn der MOSFET Treiber schaltet. > Die Schaltregler sind relativ groß, ich brauch aber ein BEC mit 5A und > eine 15V Versorgung mit etwa 2A. Ich dachte du brauchst die 15V nur für die MOSFET Treiber. Selbst wenn die MOSFET Treiber 2A Spitze haben brauchst du nur ein paar Milli-Ampere im arithmetischen Mittel. Hier würde eine Mikroprozessorgetriebene Kondensatorladungspumpe doch dicke ausreichen. > Wie kommst du auf komperatoren ? Weil man üblicherweise die BEMF-Spannung gegen den (virtuellen) Motorsternpunkt kompariert, um so den Kommutierungszeitpunkt zu berechnen. > Ein Komperator nützt mir doch nichts. Die 100nF an den Ausgängen der OPs > hab ich mittlerweile auch alle entfernt Einen Komparator brauchst du auf jeden Fall für die sensorlose Kommutierungserkennung. Ob du den internen im AVR benutzt (wie z.B. Mikrokopter) oder externe Komparatoren ist dabei wurscht. Hast du auch die Kurzschlüsse an den Operationsverstärkern entfernt? > Mit der Sinuskommutierung muss ich dir allerdings irgendwie recht geben, > du meinst praktisch immer den Strom zweier Phasen mit nem Hallsensor > messen ? Kann man machen. Auf jeden fall braucht man aber externe Lagegeber, soweit ich weiß. > Die Transistoren sollten eigentlich in die Lowside runter, das mal > gleich vorweg. Was meinst du damit? > Ich hab an die Eingänge der Treiber +15V hingesetzt, weil ich halt im > Datenblatt die Zeile wos ums VIN für HIN, LIN bei VDD von 15V geht wohl > falsch aufgefasst habe. Wenn ihr mir alle sagt, dass ich trotz VDD von > 15V mit 3,3V die eingänge ansteuern kann, dann stell ich mich da nicht > mehr in den Weg. Ich bin froh, wenn ich des mit 3,3V machen kann Das steht doch direkt auf der ersten Seite (der man sonst eigentlich keine Beachtung schenken darf, weil da nur Marketingtechnische Sachen angegeben sind ;-)): --- 3.3V Logic Compatible Separate Logic Supply range from 3.3V to 20V --- An VDD schließt du 3.3V (linke Seite, Logikseite) an. An der rechten Seite (Hochstrom-Seite) lässt du 15V. Dann passt es doch.
Modell Bauer schrieb: > so, neue Bilder, jetzt hab ich auch gerafft, was Simon mit > kurzgeschlossenen OPs gemeint hat, ich hab überall beim inventierenden > Eingang jetzt des GND weg gemacht. Toll! Dafür hast du jetzt die Eingänge der MOSFET Treiber auf +15V gelegt und jagst so 15V in den Mikrocontroller. Ich glaube langsam du bist ein Troll ;-) > Ich frag mich aber jetzt, was ich mit C56, C57 und C58, C61, C64 und so > weiter machen soll, wobei die Schaltung wohl eh weichen wird, es sei > denn, ich kann des irgendwie für die Hallsensoren nehmen. Wo sind denn die Kondensatoren? Übrigens, der Operationsverstärker am Sternmittelpunkt, was soll das sein? Invertierender Verstärker? > Mit hallsensoren sollte man den ganzen Strom der durch die phasen fließt > messen oder reicht nur ein kleiner teil hinter einem spannungsteiler ? Mit Hall-Sensoren dachte ich eigentlich an Hall-Positionssensoren, wie ihn einige BLDC Motoren haben um die Rotorlage feststellen zu können. > So siehts im Augenblick aus. Ich hab auch mal den angefangenen Teil des > dsPIC 33 dazu gelegt Mach doch erst mal einen Teil wenigstens funktionsfähig..
Angehängte Dateien:
-

IR2010V4.png
13 KB
Die Kondensatoren sind an den OPs, parallel zu den Widerständen der Spannungsteiler die auf GND gehen. Das an dem Sternmittelpunkt soll ein Komperator sein, da fehlt aber die Hysterese. Das mit den +15V ist jetzt korrigiert und der Kondensator zwischen VCC und GND durch einen mit 220µF ersetzt. Der 2200µF bei der Phase ist jetzt auch ein 220µF ach ja, ich schein tatsächlich ein trottel zu sein xD Zu den Spannungen der Schaltregler Ich brauch die 6V für Servos, Empfänger und der gleichen. Die +15V sind für die MOSFETs, die +12V die daraus entstehen sind für Lüfter und andere Scherze mit 12V. Dazu noch eine kleine 5V Versorgung
sorry, aber ich lach' mich weg - auch wenn das nicht Sinn der Sache sein sollte. Da lese ich am dsPIC einen Portpin mit 'I>200A' !!?? Auch wenn das nur ein Signal sein sollte, so glaube ich kaum, dass du jemals 200A regeln wirst - zumindest nicht bei diesen vielen Fehlern, die du in deinen Plänen eingebaut hast. Es wird auch nicht dadurch besser, wenn dir andere dabei 'vorsagen', was alles nicht korrekt ist. Mein Vorschlag: Nimm 'nen Motor mit 2 bis 3 A Stromaufnahme, bau' dir eine vernünftige Treiberschaltung mit Leistungsstufe dafür, messe sämtliche Signale und schau dir in Ruhe an, ob die Signale nicht irgendwo verschliffen werden. Erst, wenn du dann den Motor auch noch aus voller Drehzahl problemlos reversieren kannst, solltest du dich an 20A wagen. 200A sind in weiter Ferne und sehe ich bislang bei dir überhaupt noch nicht. 200A im Griff zu haben - dazu benötigst du absolutes Insiderwissen - und das scheinst du (noch) nicht zu besitzen. In diesem Sinne und nichts für ungut. Rudi
da sollte eigentlich auch 20A stehen^^, ich wollte da nen interrupt auslösen, deshalb hängt der auch da an dem Pin. Der Sinn dahinter ist, dass ich erreichen wollte, dass im Falle eines Stromanstieges über 20A die MOSFETs am Ende der Schaltung den Strom unterbrechen. Die ganze schaltung wird logischerweiße zuerst mit nem ganz kleinen motor ausprobiert, bin ja nicht verrückt. Die ganze software muss ich ja auch noch schreiben, zudem kann mein RC Car Motor nur 50A ziehen, was er im Leerlauf aber garantiert nicht tut
>da sollte eigentlich auch 20A stehen^^, ich wollte da nen interrupt >auslösen, deshalb hängt der auch da an dem Pin. Der Sinn dahinter ist, >dass ich erreichen wollte, dass im Falle eines Stromanstieges über 20A >die MOSFETs am Ende der Schaltung den Strom unterbrechen. Bis Dein Controller den Interrupt abgearbeitet hat ist im Fehlerfall der Fet schon tot. normalerweise macht man den Schutz als Hardware. Der Verpolschutz ist immer noch unwirksam. Die Puldowns an den Eingängen Der Brückentreibern können auch weg, die sind schon im IC drin. Bei der Spannungsversorgung scheinen mir auch einenige Fehler zu sein. Keine Lust da alles aufzudröseln, mit weniger Aufwand ginge es sicher auch und die Fallen kommen dann besonders beim Layout. Da braucht es einige Erfahrung die Du aber offenbar nicht hast. Dann das ganze noch mit einem dsPIC steuern und noch Sinuskommutierung (die nur in seltenen Fällen wirklich notwendig ist), gehts nicht ne Nummer kleiner? Mein Rat: Versuche erst mal einen kleinen BLDC ohne umfangreiche Peripherie zum laufen zu bekommen. Es gibt von den verschiedensten Herstellern dazu auch Entwicklungsboards (zB bei Glyn, aber auch Microchip und Atmel hat da was, da die Schaltung meisst offen liegt kann man das auch 'abkupfern') von denen man einiges lernen kann wie so eine Steuerung gebaut wird. Nei den Schaltreglern am besten mit den recht gutmütigen 'Simple Switchern' von National (zB LM2575 etc) Erfahrung sammeln, die sind nicht so Layoutkritisch. Ohne Erfahrung gleich mit einem Umfangreichen Projekt anfangen bringt Frust statt Lust.
die MOSFETs die ich verwenden wollte hätten über 200A ausgehalten, aber dennoch isses mit nem interrup wirklich absolut zeitkritisch, da geb ich dir recht. Mit den Pulldowns isses so ne Sache, anfangs hab ich sie auch nicht drinne gehabt, weil ich nämlich mal was drüber gelesen hab, dass die schon vorhanden sind. Dann hat man mir aber gesagt, dass ich trotz allem Pulldowns hinsetzen soll, seitdem sind die Dinger vorhanden. Die Sinus kommutierung lass ich auch fürs erste, ich hab keine lust, dass mir reihenweiße endstufen abrauchen. Zum Thema Schaltung vereinfachen: Ich kann eigentlich nur die ganzen Schaltreglen, die Lüftersteuerung, die Überprüfung der Spannungen und die Strommessung weglassen, die Schaltung fürs erkennen der Rotorlage, die Treiber brauch ich. Die Beschaltung des IR2010 dürfte aber eigentlich in Ordnung sein, im Datenblatt sind die Sachen auch nicht anderst, bis auf das, dass sie die Gatewiderstände nicht drinne haben. Manche sind sogar der Meinung, dass man da 20 Ohm nehmen soll Du sagst an der Spannungsversorgung wären auch nocoh Fehler. Eigentlich gehts ja nur vom Akku, vorbei an den parallel geschalteten Kondensatoren und dann durch die 4 parallel geschaltenen Widerstände die den Shunt bilden und von dort aus zu den Schaltreglern und zu den Anschlüssen für die Phasen des Motors. Das einzige was mir jetzt auffällt, dass ich eigentlich die Strommessung auch in der Lowside machen könnte, da würde sich dann aber nicht viel ändern. Die Beschaltung der LM3488 hab ich von der National Semiconductor Seite, auch die Werte für die Spulen, Kondensatoren und Widerstände. Die beiden LM3488 hängen parallel und haben eigentlich keine direkte Verbindung zueinander. Bei den LM1117 fehlen allerdings die Kondensatoren Zum Verpolschutz Was mich halt irritiert, ich hab hier so ne ähnliche Schaltung gefunden, derjenige hats gleich gemacht wie ich, die MOSFETs waren auch gleich gepolt.
>Mach doch erst mal einen Teil wenigstens funktionsfähig.. wie Simon schon sagte, bau doch erstmal Stück für Stück auf und teste dann die Teilschaltungen... >Zum Verpolschutz >Was mich halt irritiert, ich hab hier so ne ähnliche Schaltung gefunden, >derjenige hats gleich gemacht wie ich, die MOSFETs waren auch gleich >gepolt. genau 'derjeige hats gleich geacht'....wird ohne wenn und Aber übernommen, ohne sich Gedanken darüber zu machen, wie die schaltung funktioniert - wenn sie denn funktioniert :-) Wenn du Stück für Stück vorgehst, wirst du sehen, dass der Verpolschutz bis zum Schluß warten kann - andere Dinge sind da ungleich wichtiger und vorrangiger...ein korrekter Anschluss liegt in erster Linie in der Verantwortung des späteren Anwenders Rudi
Angehängte Dateien:

Ich arbeite mich jetzt von Anfang bis Ende durch. Als erstes brauch ich eine Spannungsversorgung und eine Strommessung. Die Strommessung könnte ich auch induktiv machen, allerdings hab ich so schön kleine SMD Widerstände mit 0,5m Ohm, die sich hervorragend als Shunt eignen. Die 470µF dienen als Energiespeicher, die 100nF sollten hohe Frequenzen unterdrücken, wobei ich mich ehrlich frage ob das überhaupt da so sinnvoll ist. Der INA128 verstärkt wie ich schon geschrieben hab das Signal um den Faktor 132. R66 und R65 bilden wieder den Spannungsteiler für die 3,3V, der Operationsverstärker soll als Impedanzwandler arbeiten, ich weiß viele sagen, dass es eigentlich unnötig ist, ich würde ihn aber trotzdem sehr gerne drinne haben.
Angehängte Dateien:
-

Strom_Akkuspannung4.png
6,6 KB
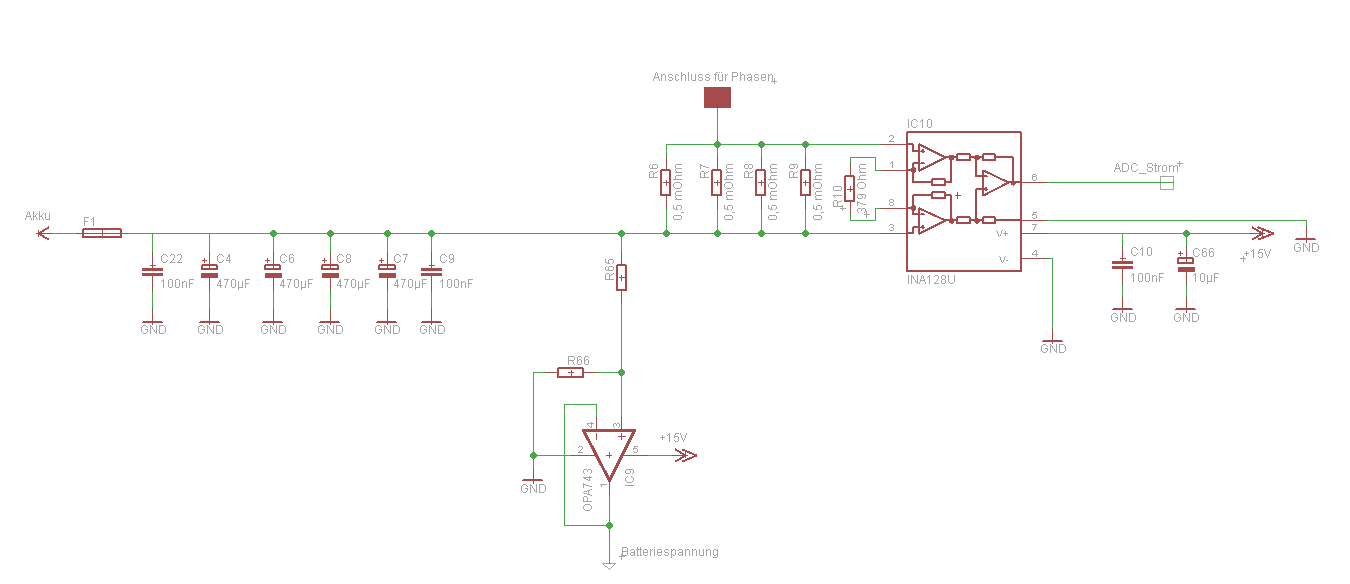
den oberen beitrag kann ich blöderweiße nicht mehr löschen Ich arbeite mich jetzt von Anfang bis Ende durch. Als erstes brauch ich eine Spannungsversorgung und eine Strommessung. Die Strommessung könnte ich auch induktiv machen, allerdings hab ich so schön kleine SMD Widerstände mit 0,5m Ohm, die sich hervorragend als Shunt eignen. Die 470µF dienen als Energiespeicher, die 100nF sollten hohe Frequenzen unterdrücken, wobei ich mich ehrlich frage ob das überhaupt da so sinnvoll ist. Der INA128 verstärkt wie ich schon geschrieben hab das Signal um den Faktor 132. R66 und R65 bilden wieder den Spannungsteiler für die 3,3V, der Operationsverstärker soll als Impedanzwandler arbeiten, ich weiß viele sagen, dass es eigentlich unnötig ist, ich würde ihn aber trotzdem sehr gerne drinne haben.
Hmm, Shunt ist 0,125 mOhm ist schon sehr klein auch für höhere Ströme
und durch die niedrige Meßspannung störempfindlich isbesondere bei
niedrigen Strömen. Der INA vertägt nur maximal 40V an den Eingängen, da
man immer mit Spannungsspitzen rechnen muss sollte die Betriebsspannung
ein ganzes Stück niedriger sein. Normalerweise wird der Strom für den
Motor in der Lowside gemessen da hat man weniger Probleme.
> schön kleine SMD Widerstände
Ich weiss nicht was für Dich klein ist, hoffentlich haben die
ausreichend Leistung denn wenn Du wirklich mal 80A drüber schicken
willst fallen da bis 1W ab.
die Widerstände halten 0,25W auf Dauer aus, da sind dann 80A kein Problem, dann fallen gerade mal 0,8W ab. Die Strommessung ist jetzt in der Lowside, ich wollts in der Highside haben, weil ich GND möglichst nahe bei 0V haben wollte
Angehängte Dateien:
-

PrinzipSchutzschaltung.png
1,9 KB -

Verpolschutz_Strommessung2.png
8,9 KB
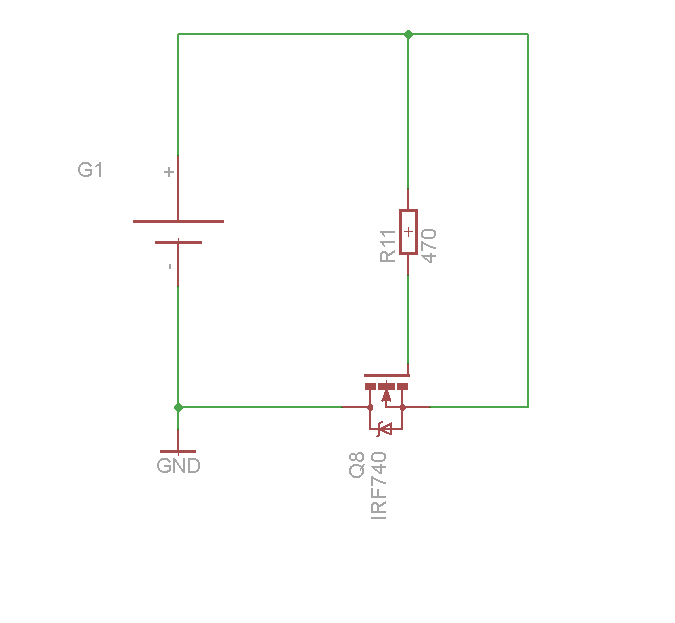

Die Strommessung ist jetzt in der Lowside, ich hab mal jetzt einfach die prinzipielle Schaltung meines Verpolschutzes aufgemalt. Damit will ich erreichen, dass der MOSFET hochohmig bleibt. Das Drain ist an GND angeschlossen Das selbe Prinzip will ich halt in meinem regler verwenden
...aber du weißt schon, wie eine LED funktioniert, oder? Und auch, für welchen zweck der INA eigentlich entwickelt wurde? Und das zumindest D15 oder D16 überflüssig ist? Und du weißt auch, was Normwerte sind?....so zieht sich eigentlich dieser rote Faden komplett durch dein (Nicht)System.... meine Meinung: dat wird nix Rudi
die LED ist falsch rum drinne, dass sie im Falle einer Verpolung leuchtet^^ Wieso sind D15 und 16 überflüssig, die schützen doch immernoch die gates
>Wieso sind D15 und 16 überflüssig, die schützen doch immernoch die gates
Ich habe nicht geschrieben UND sondern ODER. Dann schau dir doch mal an,
ob die in deiner Schaltung vielleicht direkt parallel geschaltet sein
könnten...abgesehen davon schützt man ein Gate nicht an DER Stelle, wo
deine Dioden sitzen.
So, das muss reichen...ich würde sagen, mach 'ne Leiterplatte, und teste
und sammle deine Erfahrungen... sonst wirst du in einem Jahr noch immer
herumeiern, weil jeder etwas noch dazu sagen kann und wird...vielleicht
hast du ja Glück und alles funktioniert auf Anhieb - wäre dir zu
wünschen - mein Berufsleben und die daraus resultierenden Erfahrungen
haben mir da allerdings andere Wege aufgezeigt :-)
Rudi
Junge Junge, warum hälst du so an deinem bekackten Verpolungsschutz, Stromversorgung und der Strommessung fest, wo du überhaupt noch keinen Regler hast? Tipp: bau doch erstmal NUR ne vernünftige MOSFET-Treiberstufe auf, schließe deinen µC an und versorge alles mit nem Labornetzteil. Wenn du es schaffst mit den MOSFETS nen Motor anzusteuern, ganz rudimentär, dann gehts erstmal weiter... ...um die Stromversorgung würd ich mich zu LETZT kümmern, und grundsätzlich mit Netzteil (+ Strombegrenzung ) arbeiten, bevor dir die MOSFETS am Akku abrauchen. Verpolungsschutz ist quatsch und kommt "WENN" dann ganz zum schluss. Aber vergiss den doch einfach, verpolungssicheren Stecker, fertig, das ist STANDARD!!
Der Gateanschluss muss um Durchzusteuern etwa 8V (maximal 20V !) positiver sein als der Sourceanschluss. Da ist aber bei Deiner Schaltung nicht immer so, da im ausgeschalteten Zustand, wenn also alle Brückenfets gesperrt sind und somit RL='unendlich', Source undefinierten Pegel hat. Deine Steuerspannung ist aber auf GND, der an -U und so auch auf Drain liegt bezogen.
Ich kann auch nur empfehlen ein kleines BLDC-Evalboard zu nehmen. Das mit der STrommessung an der Motorphase würde ich sowieso weglassen...die Kennlinie der Motoren ist so arg Nichtliniear, dass damit kaum was sinnvoll auszuwerten ist. Nehm einfach einen Motor mit integrierten HAllsensoren, diese zeigen dir dann an in Welchen von 6 möglichen/erlaubten zuständen du bist.... --> guck mal hier http://de.nanotec.com/schrittmotor_animation.html PS: Einen Motor unter Last einfach abschalten bedeutet meist die zerstörung der Brücken-Mosfets. Ist bei uns ständig passiert, bis wir eine schaltung reingeschnitzt haben, die im Fall des Falles die Mosfets kurz offen hält, das der Strom aus dem Motor abfließen kann.... Alle möglichen TVS-DOiden usw waren da immer zu träge...also 20A-ziehen und einfach abschalten is nich
Synchro schrieb: > Ich kann auch nur empfehlen ein kleines BLDC-Evalboard zu nehmen. > Das mit der STrommessung an der Motorphase würde ich sowieso > weglassen...die Kennlinie der Motoren ist so arg Nichtliniear, dass > damit kaum was sinnvoll auszuwerten ist. Nehm einfach einen Motor mit > integrierten HAllsensoren, diese zeigen dir dann an in Welchen von 6 > möglichen/erlaubten zuständen du bist.... --> guck mal hier > http://de.nanotec.com/schrittmotor_animation.html Strommessung ist sinnlos? Na wenn du das sagst ;-) Wenn man mehrere Regler verwendet (Drehzahl, Strom, usw.) ist die Kennlinie gar nicht mehr so nichtlinear. Bzw. du musst auch sagen, welche zwei größen nichtlinear zueinander sind. Motoren mit Hallsensoren sind teurer, aber der TO wird vermutlich schneller zu Ergebnissen kommen. Auch brauchst du (in der Regel) für eine Sinuskommutierung (Die ich übrigens, wenn überhaupt erst später realisieren würde) die Hall Sensoren. Ist vielleicht also gar nicht mal so schlecht die Idee. Da du deinen Brushless Motor ja eh in einem RC-Auto verwenden willst, kommen so gut wie nur Motoren mit Hallsensoren in Frage. Bei sensorlosen Motoren muss der Motor nämlich bis zu einer gewissen Drehzahl Open-Loop hochfahren (ohne Regelschleife. also ohne BEMF-Erkennung). Und das ist bei RC-Cars die aus dem Stand beschleunigen wollen natürlich Käse. > PS: Einen Motor unter Last einfach abschalten bedeutet meist die > zerstörung der Brücken-Mosfets. Ist bei uns ständig passiert, bis wir > eine schaltung reingeschnitzt haben, die im Fall des Falles die Mosfets > kurz offen hält, das der Strom aus dem Motor abfließen kann.... Alle > möglichen TVS-DOiden usw waren da immer zu träge...also 20A-ziehen und > einfach abschalten is nich Dann konnte die intrinsische Body-Diode den Strom nicht auf Dauer ab. Vermutlich hab ihr sehr auf Kante dimensioniert oder der Motor hatte ein großes Trägheitsmoment. Wenn man das machen möchte, kann man auch dicke Schottky Dioden parallel zu den FETs schalten, die den Motorstrom noch eine Weile lang problemlos tragen können.
mein Motor hat sogar Sensoren, dennoch will ichs auch haben, dass es Sensor los geht. Beides wär natürlich ideal, aber eins nachdem anderen. Jetzt besorg ich mir erstmal meine IR2010 und bau 3 davon auf Freilaufdioden sind bei mir pro großem MOSFET eine MBR2060, was denke ich reichen sollte. Freilaufdioden kommen auf jedenfall rein, auch, wenn mans villeicht hinkriegen könnte, dass man sie garnicht braucht, Sicher ist Sicher
ich bin gerade am überlegen ob ich nicht für den Schutz der Gates ne einfache Z-Diode nehmen soll, Suppressordioden scheints nicht mit ner maximalen Klemmspannung von 20V bei gleichzeitigem Urws von 15V zu geben. was würdet ihr tuen ?
> Freilaufdioden sind bei mir pro großem MOSFET eine MBR2060, was denke > ich reichen sollte. > Freilaufdioden kommen auf jedenfall rein, auch, wenn mans villeicht > hinkriegen könnte, dass man sie garnicht braucht, Sicher ist Sicher Ich habe so einen Motortreiber mal aufgebaut und bei mir wurden die Freilaufdioden knalle heiß. Eine hat sich sogar mal abgelötet. Die induzierten Ströme sind nicht zu verachten. Wärend der High Side Mosfet PWM knallt, hat die Bodydiode vom Lowside ordentlich was abzubraten ;)) Seitdem mache ich sowas grundsätzlich nur noch mit einem aktiven Freilauf. Daher wäre ein µC mit 6 PWM Kanälen (ev. atmega168?!) sehr praktisch. lg jonny
Klar. Aufgrund der Motorinduktivität fließt der Strom des Motors natürlich weiter. Also muss die Freilaufdiode den Strom des Motors (und die in der Diode dabei entstehende Verlustleistung) aushalten. Man muss nur schauen auf welche Dauer sie das tun muss. Aber du hast Recht. Aktiver Freilauf ist schon bei mittelgrößeren Motoren ne tolle Sache ;-)
> Aktiver Freilauf ist schon bei mittelgrößeren > Motoren ne tolle Sache ;-) Und er ist doch auch nicht schwer zu implementieren. Man muss ja nur den unteren Mosfet mit einer invertierten PWM schalten (Totzeit noch berücksichtigen und die Pulsdauer da zb. etwas kürzer machen).
kennt keiner Suppressordioden, die eine Schaltung bis 15V nicht beeinflussen, aber die Spannung auf maximalst 20V begrenzen ? kleine Frage zu dem EWS Widerstand bei den Kondensatoren. Das Tool von National Semi schmeißt mir auch irgendwelche Widerstandswerte raus, isses schlimm, wenn ich Kondensatoren mit nem geringeren EWS Widerstand nehme, sollte doch eigentlich nur die Spannungsripple verkleinern oder ?
Wenn Du mit einem IC (IR21xx) ansteuerst sind Schutzdioden an den Gates verzichtbar da der IC schon selbst für korrekte Werte sorgt. Die Abblock-Elkos werden mitunter stark durch Impulsströme belastet so das die schon einen kleinen ESR haben sollten. schalte 2 oder mehr kleinerer Elkos paralell und nahe an den FETs je einen KeKo dann passt das schon. Ist so besser als ein dicker Elko und wird in der Praxis meist so gemacht.
ich hab nen IR20xx, aber macht da keinen Unterschied, ich würd mich halt etwas wohler fühlen, die MOSFET sind halt schweine teuer. Ich hab so langsam das gefühl, dass es überhaupt keine Suppressordioden mit Urws von 15V gibt, die die Spannung auf maximal 20V begrenzen
Boor. Nimm doch einfach eine P6KE 15 bei Reichelt. Wo ist denn das Problem. Die fängt bei typ. 15V (bei 1mA) an zu leiten und begrenzt auf typ. 21V bei 28A (Datenblatt rulez ;-)).
ist des wirklich so klug, wenn man standardmäßig mit 15V arbeitet, eine Diode zu nehmen, die schon bei 15V leitfähig wird ? Ich bin halt davon ausgegangen, dass des nicht der Sinn der Sache ist. Niemand baut doch nen Überspannungsschutz für 230V Geräte mit Varistoren die schon bei 230V leiten.
Tja, dann muss du deinen Toleranzrahmen wohl erhöhen, oder die Gatespannung senken (z.B. auf 12V). Oder die Teile einfach weglassen, wie schon gesagt. Der Treiber selbst geht sowieso bei Vcc > Vs + 20V kaputt.
wie wärs, wenn ich ne suppressordiode an die Treiberversorgung hänge und ne Z-Diode bei den Gates der MOSFETs ? Suppressordioden haben halt ne steilere Kennlinie und noch paar andere schöne eigenschaften, deshalb wollt ich eigentlich auf die gehen. Bei den P6KE steht bei der 15V Version schon was von Ub = 12V, das heißt doch eigentlich, dass die diode schon ab 12V langsam anfängt zu leiten ?
bedenke auch, dass du mit zusätzlichen Dioden am Gate die Kapazität erhöst, welche du umladen musst. Dadurch verringert sich die Schaltgeschwindigkeit und dadurch wird die Verlustleistung im Mosfet größer (er wird wärmer)...
ja, daran hab ich wenn ich ehrlich bin noch garnet gedacht. Dann wärs am klügsten ne Diode an jeder Versorgungsleitung der Treiber anzubringen, ne Z-Diode finde ich aber relativ ungeeignet dafür, ich will ehrlich gesagt kein Widerstand da rein hängen. Varistoren sind auch wieder beschissen, weil sie nen kurzschluss verursachen
Ich würde es so machen: du verbaust keine Schutzdioden und betreibst den Treiber erstmal an einem Netzgerät mit Strombegrenzung. Dann kann schonmal nichts kaputt gehen. Nun optimierst du die Software und irgendwann wird der Treiber einfach funktionieren. Dann kannst du die Strombegrenzung weglassen. Ich habe noch keinen Motortreiber mit solchen Schutzdioden gesehen. Es wird sogar teilweise auf einen Filter verzichtet, welcher die PWM aus der zu messenden rückinduzierten Spannung rausfiltert! Das kann man auch machen, wenn man den Comparatorinterrupt immer dann deaktiviert, wenn grade der PWM-Impuls kommt... Das ist aber schon ein trickreiches Detail.
Wirklich mach es Dir nicht komplizierter als es sein muss. Die
Gateschutzdioden und ähnlich geartete Schutzmaßnahmen kannst Du
verzichten. Tausende von Motortreiben kommen ohne das aus, zumal da
gesichert ist das die Spannung der TeiberIC nicht den FET schaden kann
(wenn Du Spannungspeaks von über 20V auf der 15V Schiene hast ist was
oberfaul und die Treiber und andere Peripherie ist vor den FET Tot) .
> die MOSFET sind halt schweine teuer.
Was für Exoten setzt Du den ein? Selbst die 200A Typen die ich bei einem
Gerät einsetze kosten nicht über 2€ Stück (in Einzelstücken schom mal
bis 3€). Nimmst Du die üblchen erdächtigen für solche Anwendungen sind
die Triber (und die extra Schutzmaßnahmen) teuerer als die FETs.
Ich wollte was in Richung IRLS3036PBF nehmen. die haben schon bei 10V gerade mal maximal 2,4 mOhm, wenns gut läuft nur 1,9 mOhm, kosten halt fast 8€.
> die haben schon bei 10V gerade mal maximal 2,4 mOhm, wenns gut läuft nur > 1,9 mOhm, kosten halt fast 8€. Ich glaube nicht, dass der besonders geringe On-Widerstand so sehr ins Gewicht fällt. Bedenke, dass dieser Widerstand nur im statischen Betrieb gegeben ist. Durch die PWM Ansteuerung überwiegen andere Kennwerte häufig. Da ist es eher wichtig, dass der Mosfet sehr schnell schalten kann und das die Ansteuerung intelligent gestaltet ist (beispiel Aktiver Freilauf). Ich hatte auch Mosfets mit 6 mOhm Widerstand und die wurden mir schon bei 2A warm. Das lag an der schlechten Ansteuerung und an den Strömen in der Bodydiode durch induzierte Ströme. Ob 6mOhm oder 2mOhm wird in der Praxis völlig egal sein, weil diese Werte im Mittel nie erreicht werden. Es lohnt sich nicht das Geld da zu investieren. Kauf dir 2-Euro Typen, die tuns genauso.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.