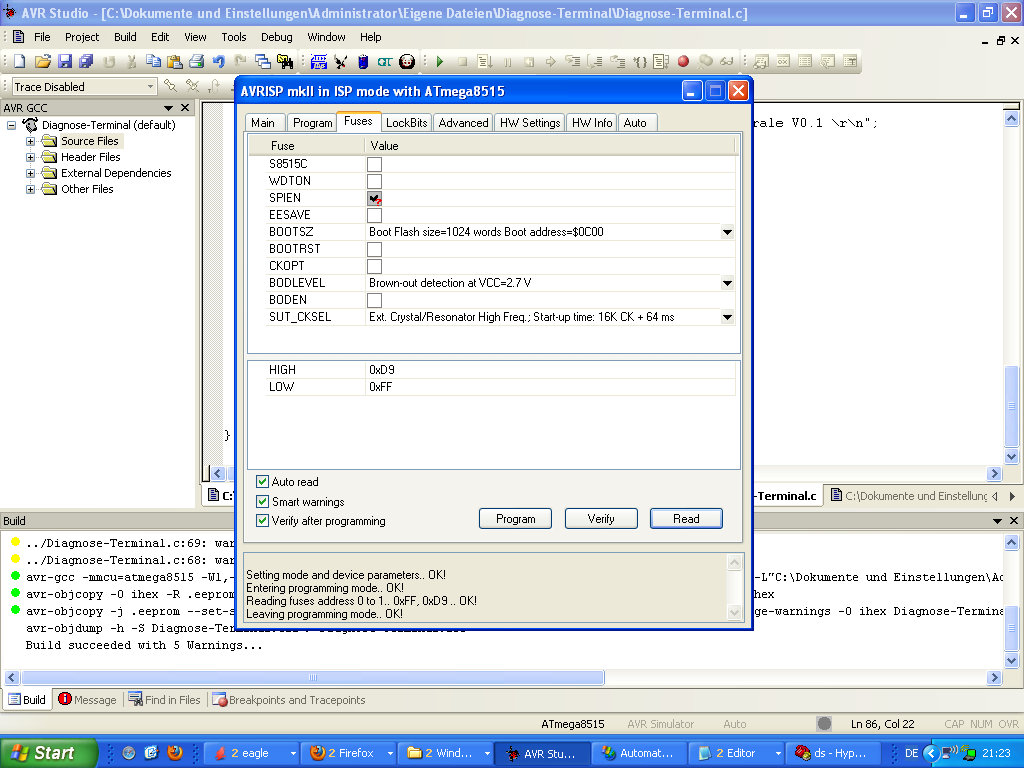
Hallo, Ich bin entweder blöd, oder mein UART will mich veräppeln! Und zwar hab in der "never ending loop" eine Pause von 1000ms (_delay_ms(1000)); somit müsste er mir jede Sekunde per UART ein Text ausgeben.. tut er aber nicht, er tut danach einfach nichts mehr :/ Nutze die Lib von Peter Fleury: #define UART_BAUD_RATE 57600 #define F_CPU 16000000UL Ich hab ein AtMega8515 mit Grundbeschaltung und einem externen Quarz, (Nein kein Quarzoscilator) die Fuses sind im AVRStudio eingestellt wie im Screenshot (Ext. Crystal/Resonator High Freq.;Start-up time: 16K + 64ms); Vielleicht kann mir ja jemand helfen. :)
Angehängte Dateien:
-

Unbenannt.PNG
80 KB
Im Buildlog sind Warnings. Poste mal den Buildlog und deinen Sourcecode.
1 | #include <stdlib.h> |
2 | #include <avr/io.h> |
3 | #include <avr/interrupt.h> |
4 | #include <util/delay.h> |
5 | #include "uart.h" |
6 | |
7 | #define UART_BAUD_RATE 57600 |
8 | |
9 | int main(void) |
10 | {
|
11 | |
12 | uart_init( UART_BAUD_SELECT(UART_BAUD_RATE,F_CPU) ); |
13 | |
14 | sei(); |
15 | |
16 | const char *text1 = "\f\a\n Diagnose Mobile Terminal V0.1 \r\n"; |
17 | const char *text2 = "** Kernel: 0.0.0.1\r\n"; |
18 | const char *text3 = "** Firmware: 0.0.0.1\r\n"; |
19 | |
20 | uart_puts(text1); |
21 | _delay_ms(1000); |
22 | uart_puts(text2); |
23 | _delay_ms(1000); |
24 | uart_puts(text3); |
25 | _delay_ms(1000); |
26 | uart_puts("OK\r\n");
|
27 | } |
Der Warning war noch ein doppel definiertes F_CPU
Ich sehe da keine Loop.
Wenn main abgearbeitet ist, bleibt der µC normalerweise stehen (eine
endlose NOP-Loop) oder macht irgendwas komisches, je nach Compiler. Mach
um den Block den du wiederholen willst noch ein while(1){ ... }, dann
tuts auch.
Und sei() würde ich weglassen, wenn du keine Interrupts verwendest.
Das hat doch jetzt Primär mit dem Loop nichts zu tun, Fakt ist das nach uart_puts(text1) gar nichts mehr passiert, keine weiteren Texte!
Das drück dich bitte nächstes mal präziser aus, wenn ich "loop" und "danach" lese, aber keine Schleife sehe, ist das natürlich der erste Gedanke. Ich vermute mal, das der nicht im delay hängenbleibt, sondern in der uart-Routine. Poste die mal. Gehts übrigens, wenn du statt
1 | uart_puts(text1); |
2 | _delay_ms(1000); |
3 | uart_puts(text2); |
4 | _delay_ms(1000); |
folgendes
1 | uart_puts("bla");
|
2 | _delay_ms(1000); |
3 | uart_puts("blubb");
|
4 | _delay_ms(1000); |
machst? Und was empfängt die Gegenstelle überhaupt, den kompletten text1, oder nur Teile?
Hey ;) Also es steht im Terminal immer der volle Text,
1 | Diagnose Mobile Terminal V0.1 <\r><\n> |
Ab danach kommt nichts mehr ebenfalls wenn ich das ich "bla" änder: ?bla Die UART Routine ist die von Fleury im Original.
1 | /************************************************************************* |
2 | Title: Interrupt UART library with receive/transmit circular buffers |
3 | Author: Peter Fleury <pfleury@gmx.ch> http://jump.to/fleury |
4 | File: $Id: uart.c,v 1.6.2.2 2009/11/29 08:56:12 Peter Exp $ |
5 | Software: AVR-GCC 4.1, AVR Libc 1.4.6 or higher |
6 | Hardware: any AVR with built-in UART, |
7 | License: GNU General Public License |
8 | |
9 | DESCRIPTION: |
10 | An interrupt is generated when the UART has finished transmitting or |
11 | receiving a byte. The interrupt handling routines use circular buffers |
12 | for buffering received and transmitted data. |
13 | |
14 | The UART_RX_BUFFER_SIZE and UART_TX_BUFFER_SIZE variables define |
15 | the buffer size in bytes. Note that these variables must be a |
16 | power of 2. |
17 | |
18 | USAGE: |
19 | Refere to the header file uart.h for a description of the routines. |
20 | See also example test_uart.c. |
21 | |
22 | NOTES: |
23 | Based on Atmel Application Note AVR306 |
24 | |
25 | LICENSE: |
26 | Copyright (C) 2006 Peter Fleury |
27 | |
28 | This program is free software; you can redistribute it and/or modify |
29 | it under the terms of the GNU General Public License as published by |
30 | the Free Software Foundation; either version 2 of the License, or |
31 | any later version. |
32 | |
33 | This program is distributed in the hope that it will be useful, |
34 | but WITHOUT ANY WARRANTY; without even the implied warranty of |
35 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the |
36 | GNU General Public License for more details. |
37 | |
38 | *************************************************************************/ |
39 | #include <avr/io.h> |
40 | #include <avr/interrupt.h> |
41 | #include <avr/pgmspace.h> |
42 | #include "uart.h" |
43 | |
44 | |
45 | /* |
46 | * constants and macros |
47 | */ |
48 | |
49 | /* size of RX/TX buffers */ |
50 | #define UART_RX_BUFFER_MASK ( UART_RX_BUFFER_SIZE - 1) |
51 | #define UART_TX_BUFFER_MASK ( UART_TX_BUFFER_SIZE - 1) |
52 | |
53 | #if ( UART_RX_BUFFER_SIZE & UART_RX_BUFFER_MASK ) |
54 | #error RX buffer size is not a power of 2 |
55 | #endif |
56 | #if ( UART_TX_BUFFER_SIZE & UART_TX_BUFFER_MASK ) |
57 | #error TX buffer size is not a power of 2 |
58 | #endif |
59 | |
60 | #if defined(__AVR_AT90S2313__) \ |
61 | || defined(__AVR_AT90S4414__) || defined(__AVR_AT90S4434__) \ |
62 | || defined(__AVR_AT90S8515__) || defined(__AVR_AT90S8535__) \ |
63 | || defined(__AVR_ATmega103__) |
64 | /* old AVR classic or ATmega103 with one UART */ |
65 | #define AT90_UART |
66 | #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV |
67 | #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA |
68 | #define UART0_STATUS USR |
69 | #define UART0_CONTROL UCR |
70 | #define UART0_DATA UDR |
71 | #define UART0_UDRIE UDRIE |
72 | #elif defined(__AVR_AT90S2333__) || defined(__AVR_AT90S4433__) |
73 | /* old AVR classic with one UART */ |
74 | #define AT90_UART |
75 | #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV |
76 | #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA |
77 | #define UART0_STATUS UCSRA |
78 | #define UART0_CONTROL UCSRB |
79 | #define UART0_DATA UDR |
80 | #define UART0_UDRIE UDRIE |
81 | #elif defined(__AVR_ATmega8__) || defined(__AVR_ATmega16__) || defined(__AVR_ATmega32__) \ |
82 | || defined(__AVR_ATmega8515__) || defined(__AVR_ATmega8535__) \ |
83 | || defined(__AVR_ATmega323__) |
84 | /* ATmega with one USART */ |
85 | #define ATMEGA_USART |
86 | #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV |
87 | #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA |
88 | #define UART0_STATUS UCSRA |
89 | #define UART0_CONTROL UCSRB |
90 | #define UART0_DATA UDR |
91 | #define UART0_UDRIE UDRIE |
92 | #elif defined(__AVR_ATmega163__) |
93 | /* ATmega163 with one UART */ |
94 | #define ATMEGA_UART |
95 | #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV |
96 | #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA |
97 | #define UART0_STATUS UCSRA |
98 | #define UART0_CONTROL UCSRB |
99 | #define UART0_DATA UDR |
100 | #define UART0_UDRIE UDRIE |
101 | #elif defined(__AVR_ATmega162__) |
102 | /* ATmega with two USART */ |
103 | #define ATMEGA_USART0 |
104 | #define ATMEGA_USART1 |
105 | #define UART0_RECEIVE_INTERRUPT SIG_USART0_RECV |
106 | #define UART1_RECEIVE_INTERRUPT SIG_USART1_RECV |
107 | #define UART0_TRANSMIT_INTERRUPT SIG_USART0_DATA |
108 | #define UART1_TRANSMIT_INTERRUPT SIG_USART1_DATA |
109 | #define UART0_STATUS UCSR0A |
110 | #define UART0_CONTROL UCSR0B |
111 | #define UART0_DATA UDR0 |
112 | #define UART0_UDRIE UDRIE0 |
113 | #define UART1_STATUS UCSR1A |
114 | #define UART1_CONTROL UCSR1B |
115 | #define UART1_DATA UDR1 |
116 | #define UART1_UDRIE UDRIE1 |
117 | #elif defined(__AVR_ATmega64__) || defined(__AVR_ATmega128__) |
118 | /* ATmega with two USART */ |
119 | #define ATMEGA_USART0 |
120 | #define ATMEGA_USART1 |
121 | #define UART0_RECEIVE_INTERRUPT SIG_UART0_RECV |
122 | #define UART1_RECEIVE_INTERRUPT SIG_UART1_RECV |
123 | #define UART0_TRANSMIT_INTERRUPT SIG_UART0_DATA |
124 | #define UART1_TRANSMIT_INTERRUPT SIG_UART1_DATA |
125 | #define UART0_STATUS UCSR0A |
126 | #define UART0_CONTROL UCSR0B |
127 | #define UART0_DATA UDR0 |
128 | #define UART0_UDRIE UDRIE0 |
129 | #define UART1_STATUS UCSR1A |
130 | #define UART1_CONTROL UCSR1B |
131 | #define UART1_DATA UDR1 |
132 | #define UART1_UDRIE UDRIE1 |
133 | #elif defined(__AVR_ATmega161__) |
134 | /* ATmega with UART */ |
135 | #error "AVR ATmega161 currently not supported by this libaray !" |
136 | #elif defined(__AVR_ATmega169__) |
137 | /* ATmega with one USART */ |
138 | #define ATMEGA_USART |
139 | #define UART0_RECEIVE_INTERRUPT SIG_USART_RECV |
140 | #define UART0_TRANSMIT_INTERRUPT SIG_USART_DATA |
141 | #define UART0_STATUS UCSRA |
142 | #define UART0_CONTROL UCSRB |
143 | #define UART0_DATA UDR |
144 | #define UART0_UDRIE UDRIE |
145 | #elif defined(__AVR_ATmega48__) ||defined(__AVR_ATmega88__) || defined(__AVR_ATmega168__) || defined(__AVR_ATmega48P__) || defined(__AVR_ATmega88P__) || defined(__AVR_ATmega168P__) || defined(__AVR_ATmega328P__) |
146 | /* ATmega with one USART */ |
147 | #define ATMEGA_USART0 |
148 | #define UART0_RECEIVE_INTERRUPT SIG_USART_RECV |
149 | #define UART0_TRANSMIT_INTERRUPT SIG_USART_DATA |
150 | #define UART0_STATUS UCSR0A |
151 | #define UART0_CONTROL UCSR0B |
152 | #define UART0_DATA UDR0 |
153 | #define UART0_UDRIE UDRIE0 |
154 | #elif defined(__AVR_ATtiny2313__) |
155 | #define ATMEGA_USART |
156 | #define UART0_RECEIVE_INTERRUPT SIG_USART0_RX |
157 | #define UART0_TRANSMIT_INTERRUPT SIG_USART0_UDRE |
158 | #define UART0_STATUS UCSRA |
159 | #define UART0_CONTROL UCSRB |
160 | #define UART0_DATA UDR |
161 | #define UART0_UDRIE UDRIE |
162 | #elif defined(__AVR_ATmega329__) ||defined(__AVR_ATmega3290__) ||\ |
163 | defined(__AVR_ATmega649__) ||defined(__AVR_ATmega6490__) ||\ |
164 | defined(__AVR_ATmega325__) ||defined(__AVR_ATmega3250__) ||\ |
165 | defined(__AVR_ATmega645__) ||defined(__AVR_ATmega6450__) |
166 | /* ATmega with one USART */ |
167 | #define ATMEGA_USART0 |
168 | #define UART0_RECEIVE_INTERRUPT SIG_UART_RECV |
169 | #define UART0_TRANSMIT_INTERRUPT SIG_UART_DATA |
170 | #define UART0_STATUS UCSR0A |
171 | #define UART0_CONTROL UCSR0B |
172 | #define UART0_DATA UDR0 |
173 | #define UART0_UDRIE UDRIE0 |
174 | #elif defined(__AVR_ATmega2560__) || defined(__AVR_ATmega2561__) || defined(__AVR_ATmega1280__) || defined(__AVR_ATmega1281__) || defined(__AVR_ATmega640__) |
175 | /* ATmega with two USART */ |
176 | #define ATMEGA_USART0 |
177 | #define ATMEGA_USART1 |
178 | #define UART0_RECEIVE_INTERRUPT SIG_USART0_RECV |
179 | #define UART1_RECEIVE_INTERRUPT SIG_USART1_RECV |
180 | #define UART0_TRANSMIT_INTERRUPT SIG_USART0_DATA |
181 | #define UART1_TRANSMIT_INTERRUPT SIG_USART1_DATA |
182 | #define UART0_STATUS UCSR0A |
183 | #define UART0_CONTROL UCSR0B |
184 | #define UART0_DATA UDR0 |
185 | #define UART0_UDRIE UDRIE0 |
186 | #define UART1_STATUS UCSR1A |
187 | #define UART1_CONTROL UCSR1B |
188 | #define UART1_DATA UDR1 |
189 | #define UART1_UDRIE UDRIE1 |
190 | #elif defined(__AVR_ATmega644__) |
191 | /* ATmega with one USART */ |
192 | #define ATMEGA_USART0 |
193 | #define UART0_RECEIVE_INTERRUPT SIG_USART_RECV |
194 | #define UART0_TRANSMIT_INTERRUPT SIG_USART_DATA |
195 | #define UART0_STATUS UCSR0A |
196 | #define UART0_CONTROL UCSR0B |
197 | #define UART0_DATA UDR0 |
198 | #define UART0_UDRIE UDRIE0 |
199 | #elif defined(__AVR_ATmega164P__) || defined(__AVR_ATmega324P__) || defined(__AVR_ATmega644P__) |
200 | /* ATmega with two USART */ |
201 | #define ATMEGA_USART0 |
202 | #define ATMEGA_USART1 |
203 | #define UART0_RECEIVE_INTERRUPT SIG_USART_RECV |
204 | #define UART1_RECEIVE_INTERRUPT SIG_USART1_RECV |
205 | #define UART0_TRANSMIT_INTERRUPT SIG_USART_DATA |
206 | #define UART1_TRANSMIT_INTERRUPT SIG_USART1_DATA |
207 | #define UART0_STATUS UCSR0A |
208 | #define UART0_CONTROL UCSR0B |
209 | #define UART0_DATA UDR0 |
210 | #define UART0_UDRIE UDRIE0 |
211 | #define UART1_STATUS UCSR1A |
212 | #define UART1_CONTROL UCSR1B |
213 | #define UART1_DATA UDR1 |
214 | #define UART1_UDRIE UDRIE1 |
215 | #else |
216 | #error "no UART definition for MCU available" |
217 | #endif |
218 | |
219 | |
220 | /* |
221 | * module global variables |
222 | */ |
223 | static volatile unsigned char UART_TxBuf[UART_TX_BUFFER_SIZE]; |
224 | static volatile unsigned char UART_RxBuf[UART_RX_BUFFER_SIZE]; |
225 | static volatile unsigned char UART_TxHead; |
226 | static volatile unsigned char UART_TxTail; |
227 | static volatile unsigned char UART_RxHead; |
228 | static volatile unsigned char UART_RxTail; |
229 | static volatile unsigned char UART_LastRxError; |
230 | |
231 | #if defined( ATMEGA_USART1 ) |
232 | static volatile unsigned char UART1_TxBuf[UART_TX_BUFFER_SIZE]; |
233 | static volatile unsigned char UART1_RxBuf[UART_RX_BUFFER_SIZE]; |
234 | static volatile unsigned char UART1_TxHead; |
235 | static volatile unsigned char UART1_TxTail; |
236 | static volatile unsigned char UART1_RxHead; |
237 | static volatile unsigned char UART1_RxTail; |
238 | static volatile unsigned char UART1_LastRxError; |
239 | #endif |
240 | |
241 | |
242 | |
243 | SIGNAL(UART0_RECEIVE_INTERRUPT) |
244 | /************************************************************************* |
245 | Function: UART Receive Complete interrupt |
246 | Purpose: called when the UART has received a character |
247 | **************************************************************************/ |
248 | {
|
249 | unsigned char tmphead; |
250 | unsigned char data; |
251 | unsigned char usr; |
252 | unsigned char lastRxError; |
253 | |
254 | |
255 | /* read UART status register and UART data register */ |
256 | usr = UART0_STATUS; |
257 | data = UART0_DATA; |
258 | |
259 | /* */ |
260 | #if defined( AT90_UART ) |
261 | lastRxError = (usr & (_BV(FE)|_BV(DOR)) ); |
262 | #elif defined( ATMEGA_USART ) |
263 | lastRxError = (usr & (_BV(FE)|_BV(DOR)) ); |
264 | #elif defined( ATMEGA_USART0 ) |
265 | lastRxError = (usr & (_BV(FE0)|_BV(DOR0)) ); |
266 | #elif defined ( ATMEGA_UART ) |
267 | lastRxError = (usr & (_BV(FE)|_BV(DOR)) ); |
268 | #endif |
269 | |
270 | /* calculate buffer index */ |
271 | tmphead = ( UART_RxHead + 1) & UART_RX_BUFFER_MASK; |
272 | |
273 | if ( tmphead == UART_RxTail ) {
|
274 | /* error: receive buffer overflow */ |
275 | lastRxError = UART_BUFFER_OVERFLOW >> 8; |
276 | }else{
|
277 | /* store new index */ |
278 | UART_RxHead = tmphead; |
279 | /* store received data in buffer */ |
280 | UART_RxBuf[tmphead] = data; |
281 | } |
282 | UART_LastRxError = lastRxError; |
283 | } |
284 | |
285 | |
286 | SIGNAL(UART0_TRANSMIT_INTERRUPT) |
287 | /************************************************************************* |
288 | Function: UART Data Register Empty interrupt |
289 | Purpose: called when the UART is ready to transmit the next byte |
290 | **************************************************************************/ |
291 | {
|
292 | unsigned char tmptail; |
293 | |
294 | |
295 | if ( UART_TxHead != UART_TxTail) {
|
296 | /* calculate and store new buffer index */ |
297 | tmptail = (UART_TxTail + 1) & UART_TX_BUFFER_MASK; |
298 | UART_TxTail = tmptail; |
299 | /* get one byte from buffer and write it to UART */ |
300 | UART0_DATA = UART_TxBuf[tmptail]; /* start transmission */ |
301 | }else{
|
302 | /* tx buffer empty, disable UDRE interrupt */ |
303 | UART0_CONTROL &= ~_BV(UART0_UDRIE); |
304 | } |
305 | } |
306 | |
307 | |
308 | /************************************************************************* |
309 | Function: uart_init() |
310 | Purpose: initialize UART and set baudrate |
311 | Input: baudrate using macro UART_BAUD_SELECT() |
312 | Returns: none |
313 | **************************************************************************/ |
314 | void uart_init(unsigned int baudrate) |
315 | {
|
316 | UART_TxHead = 0; |
317 | UART_TxTail = 0; |
318 | UART_RxHead = 0; |
319 | UART_RxTail = 0; |
320 | |
321 | #if defined( AT90_UART ) |
322 | /* set baud rate */ |
323 | UBRR = (unsigned char)baudrate; |
324 | |
325 | /* enable UART receiver and transmmitter and receive complete interrupt */ |
326 | UART0_CONTROL = _BV(RXCIE)|_BV(RXEN)|_BV(TXEN); |
327 | |
328 | #elif defined (ATMEGA_USART) |
329 | /* Set baud rate */ |
330 | if ( baudrate & 0x8000 ) |
331 | {
|
332 | UART0_STATUS = (1<<U2X); //Enable 2x speed |
333 | baudrate &= ~0x8000; |
334 | } |
335 | UBRRH = (unsigned char)(baudrate>>8); |
336 | UBRRL = (unsigned char) baudrate; |
337 | |
338 | /* Enable USART receiver and transmitter and receive complete interrupt */ |
339 | UART0_CONTROL = _BV(RXCIE)|(1<<RXEN)|(1<<TXEN); |
340 | |
341 | /* Set frame format: asynchronous, 8data, no parity, 1stop bit */ |
342 | #ifdef URSEL |
343 | UCSRC = (1<<URSEL)|(3<<UCSZ0); |
344 | #else |
345 | UCSRC = (3<<UCSZ0); |
346 | #endif |
347 | |
348 | #elif defined (ATMEGA_USART0 ) |
349 | /* Set baud rate */ |
350 | if ( baudrate & 0x8000 ) |
351 | {
|
352 | UART0_STATUS = (1<<U2X0); //Enable 2x speed |
353 | baudrate &= ~0x8000; |
354 | } |
355 | UBRR0H = (unsigned char)(baudrate>>8); |
356 | UBRR0L = (unsigned char) baudrate; |
357 | |
358 | /* Enable USART receiver and transmitter and receive complete interrupt */ |
359 | UART0_CONTROL = _BV(RXCIE0)|(1<<RXEN0)|(1<<TXEN0); |
360 | |
361 | /* Set frame format: asynchronous, 8data, no parity, 1stop bit */ |
362 | #ifdef URSEL0 |
363 | UCSR0C = (1<<URSEL0)|(3<<UCSZ00); |
364 | #else |
365 | UCSR0C = (3<<UCSZ00); |
366 | #endif |
367 | |
368 | #elif defined ( ATMEGA_UART ) |
369 | /* set baud rate */ |
370 | if ( baudrate & 0x8000 ) |
371 | {
|
372 | UART0_STATUS = (1<<U2X); //Enable 2x speed |
373 | baudrate &= ~0x8000; |
374 | } |
375 | UBRRHI = (unsigned char)(baudrate>>8); |
376 | UBRR = (unsigned char) baudrate; |
377 | |
378 | /* Enable UART receiver and transmitter and receive complete interrupt */ |
379 | UART0_CONTROL = _BV(RXCIE)|(1<<RXEN)|(1<<TXEN); |
380 | |
381 | #endif |
382 | |
383 | }/* uart_init */ |
384 | |
385 | |
386 | /************************************************************************* |
387 | Function: uart_getc() |
388 | Purpose: return byte from ringbuffer |
389 | Returns: lower byte: received byte from ringbuffer |
390 | higher byte: last receive error |
391 | **************************************************************************/ |
392 | unsigned int uart_getc(void) |
393 | {
|
394 | unsigned char tmptail; |
395 | unsigned char data; |
396 | |
397 | |
398 | if ( UART_RxHead == UART_RxTail ) {
|
399 | return UART_NO_DATA; /* no data available */ |
400 | } |
401 | |
402 | /* calculate /store buffer index */ |
403 | tmptail = (UART_RxTail + 1) & UART_RX_BUFFER_MASK; |
404 | UART_RxTail = tmptail; |
405 | |
406 | /* get data from receive buffer */ |
407 | data = UART_RxBuf[tmptail]; |
408 | |
409 | return (UART_LastRxError << 8) + data; |
410 | |
411 | }/* uart_getc */ |
412 | |
413 | |
414 | /************************************************************************* |
415 | Function: uart_putc() |
416 | Purpose: write byte to ringbuffer for transmitting via UART |
417 | Input: byte to be transmitted |
418 | Returns: none |
419 | **************************************************************************/ |
420 | void uart_putc(unsigned char data) |
421 | {
|
422 | unsigned char tmphead; |
423 | |
424 | |
425 | tmphead = (UART_TxHead + 1) & UART_TX_BUFFER_MASK; |
426 | |
427 | while ( tmphead == UART_TxTail ){
|
428 | ;/* wait for free space in buffer */ |
429 | } |
430 | |
431 | UART_TxBuf[tmphead] = data; |
432 | UART_TxHead = tmphead; |
433 | |
434 | /* enable UDRE interrupt */ |
435 | UART0_CONTROL |= _BV(UART0_UDRIE); |
436 | |
437 | }/* uart_putc */ |
438 | |
439 | |
440 | /************************************************************************* |
441 | Function: uart_puts() |
442 | Purpose: transmit string to UART |
443 | Input: string to be transmitted |
444 | Returns: none |
445 | **************************************************************************/ |
446 | void uart_puts(const char *s ) |
447 | {
|
448 | while (*s) |
449 | uart_putc(*s++); |
450 | |
451 | }/* uart_puts */ |
452 | |
453 | |
454 | /************************************************************************* |
455 | Function: uart_puts_p() |
456 | Purpose: transmit string from program memory to UART |
457 | Input: program memory string to be transmitted |
458 | Returns: none |
459 | **************************************************************************/ |
460 | void uart_puts_p(const char *progmem_s ) |
461 | {
|
462 | register char c; |
463 | |
464 | while ( (c = pgm_read_byte(progmem_s++)) ) |
465 | uart_putc(c); |
466 | |
467 | }/* uart_puts_p */ |
468 | |
469 | |
470 | /* |
471 | * these functions are only for ATmegas with two USART |
472 | */ |
473 | #if defined( ATMEGA_USART1 ) |
474 | |
475 | SIGNAL(UART1_RECEIVE_INTERRUPT) |
476 | /************************************************************************* |
477 | Function: UART1 Receive Complete interrupt |
478 | Purpose: called when the UART1 has received a character |
479 | **************************************************************************/ |
480 | {
|
481 | unsigned char tmphead; |
482 | unsigned char data; |
483 | unsigned char usr; |
484 | unsigned char lastRxError; |
485 | |
486 | |
487 | /* read UART status register and UART data register */ |
488 | usr = UART1_STATUS; |
489 | data = UART1_DATA; |
490 | |
491 | /* */ |
492 | lastRxError = (usr & (_BV(FE1)|_BV(DOR1)) ); |
493 | |
494 | /* calculate buffer index */ |
495 | tmphead = ( UART1_RxHead + 1) & UART_RX_BUFFER_MASK; |
496 | |
497 | if ( tmphead == UART1_RxTail ) {
|
498 | /* error: receive buffer overflow */ |
499 | lastRxError = UART_BUFFER_OVERFLOW >> 8; |
500 | }else{
|
501 | /* store new index */ |
502 | UART1_RxHead = tmphead; |
503 | /* store received data in buffer */ |
504 | UART1_RxBuf[tmphead] = data; |
505 | } |
506 | UART1_LastRxError = lastRxError; |
507 | } |
508 | |
509 | |
510 | SIGNAL(UART1_TRANSMIT_INTERRUPT) |
511 | /************************************************************************* |
512 | Function: UART1 Data Register Empty interrupt |
513 | Purpose: called when the UART1 is ready to transmit the next byte |
514 | **************************************************************************/ |
515 | {
|
516 | unsigned char tmptail; |
517 | |
518 | |
519 | if ( UART1_TxHead != UART1_TxTail) {
|
520 | /* calculate and store new buffer index */ |
521 | tmptail = (UART1_TxTail + 1) & UART_TX_BUFFER_MASK; |
522 | UART1_TxTail = tmptail; |
523 | /* get one byte from buffer and write it to UART */ |
524 | UART1_DATA = UART1_TxBuf[tmptail]; /* start transmission */ |
525 | }else{
|
526 | /* tx buffer empty, disable UDRE interrupt */ |
527 | UART1_CONTROL &= ~_BV(UART1_UDRIE); |
528 | } |
529 | } |
530 | |
531 | |
532 | /************************************************************************* |
533 | Function: uart1_init() |
534 | Purpose: initialize UART1 and set baudrate |
535 | Input: baudrate using macro UART_BAUD_SELECT() |
536 | Returns: none |
537 | **************************************************************************/ |
538 | void uart1_init(unsigned int baudrate) |
539 | {
|
540 | UART1_TxHead = 0; |
541 | UART1_TxTail = 0; |
542 | UART1_RxHead = 0; |
543 | UART1_RxTail = 0; |
544 | |
545 | |
546 | /* Set baud rate */ |
547 | if ( baudrate & 0x8000 ) |
548 | {
|
549 | UART1_STATUS = (1<<U2X1); //Enable 2x speed |
550 | baudrate &= ~0x8000; |
551 | } |
552 | UBRR1H = (unsigned char)(baudrate>>8); |
553 | UBRR1L = (unsigned char) baudrate; |
554 | |
555 | /* Enable USART receiver and transmitter and receive complete interrupt */ |
556 | UART1_CONTROL = _BV(RXCIE1)|(1<<RXEN1)|(1<<TXEN1); |
557 | |
558 | /* Set frame format: asynchronous, 8data, no parity, 1stop bit */ |
559 | #ifdef URSEL1 |
560 | UCSR1C = (1<<URSEL1)|(3<<UCSZ10); |
561 | #else |
562 | UCSR1C = (3<<UCSZ10); |
563 | #endif |
564 | }/* uart_init */ |
565 | |
566 | |
567 | /************************************************************************* |
568 | Function: uart1_getc() |
569 | Purpose: return byte from ringbuffer |
570 | Returns: lower byte: received byte from ringbuffer |
571 | higher byte: last receive error |
572 | **************************************************************************/ |
573 | unsigned int uart1_getc(void) |
574 | {
|
575 | unsigned char tmptail; |
576 | unsigned char data; |
577 | |
578 | |
579 | if ( UART1_RxHead == UART1_RxTail ) {
|
580 | return UART_NO_DATA; /* no data available */ |
581 | } |
582 | |
583 | /* calculate /store buffer index */ |
584 | tmptail = (UART1_RxTail + 1) & UART_RX_BUFFER_MASK; |
585 | UART1_RxTail = tmptail; |
586 | |
587 | /* get data from receive buffer */ |
588 | data = UART1_RxBuf[tmptail]; |
589 | |
590 | return (UART1_LastRxError << 8) + data; |
591 | |
592 | }/* uart1_getc */ |
593 | |
594 | |
595 | /************************************************************************* |
596 | Function: uart1_putc() |
597 | Purpose: write byte to ringbuffer for transmitting via UART |
598 | Input: byte to be transmitted |
599 | Returns: none |
600 | **************************************************************************/ |
601 | void uart1_putc(unsigned char data) |
602 | {
|
603 | unsigned char tmphead; |
604 | |
605 | |
606 | tmphead = (UART1_TxHead + 1) & UART_TX_BUFFER_MASK; |
607 | |
608 | while ( tmphead == UART1_TxTail ){
|
609 | ;/* wait for free space in buffer */ |
610 | } |
611 | |
612 | UART1_TxBuf[tmphead] = data; |
613 | UART1_TxHead = tmphead; |
614 | |
615 | /* enable UDRE interrupt */ |
616 | UART1_CONTROL |= _BV(UART1_UDRIE); |
617 | |
618 | }/* uart1_putc */ |
619 | |
620 | |
621 | /************************************************************************* |
622 | Function: uart1_puts() |
623 | Purpose: transmit string to UART1 |
624 | Input: string to be transmitted |
625 | Returns: none |
626 | **************************************************************************/ |
627 | void uart1_puts(const char *s ) |
628 | {
|
629 | while (*s) |
630 | uart1_putc(*s++); |
631 | |
632 | }/* uart1_puts */ |
633 | |
634 | |
635 | /************************************************************************* |
636 | Function: uart1_puts_p() |
637 | Purpose: transmit string from program memory to UART1 |
638 | Input: program memory string to be transmitted |
639 | Returns: none |
640 | **************************************************************************/ |
641 | void uart1_puts_p(const char *progmem_s ) |
642 | {
|
643 | register char c; |
644 | |
645 | while ( (c = pgm_read_byte(progmem_s++)) ) |
646 | uart1_putc(c); |
647 | |
648 | }/* uart1_puts_p */ |
649 | |
650 | |
651 | #endif |
1 | #ifndef UART_H |
2 | #define UART_H |
3 | /************************************************************************ |
4 | Title: Interrupt UART library with receive/transmit circular buffers |
5 | Author: Peter Fleury <pfleury@gmx.ch> http://jump.to/fleury |
6 | File: $Id: uart.h,v 1.8.2.1 2007/07/01 11:14:38 peter Exp $ |
7 | Software: AVR-GCC 4.1, AVR Libc 1.4 |
8 | Hardware: any AVR with built-in UART, tested on AT90S8515 & ATmega8 at 4 Mhz |
9 | License: GNU General Public License |
10 | Usage: see Doxygen manual |
11 | |
12 | LICENSE: |
13 | Copyright (C) 2006 Peter Fleury |
14 | |
15 | This program is free software; you can redistribute it and/or modify |
16 | it under the terms of the GNU General Public License as published by |
17 | the Free Software Foundation; either version 2 of the License, or |
18 | any later version. |
19 | |
20 | This program is distributed in the hope that it will be useful, |
21 | but WITHOUT ANY WARRANTY; without even the implied warranty of |
22 | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the |
23 | GNU General Public License for more details. |
24 | |
25 | ************************************************************************/ |
26 | |
27 | /** |
28 | * @defgroup pfleury_uart UART Library |
29 | * @code #include <uart.h> @endcode |
30 | * |
31 | * @brief Interrupt UART library using the built-in UART with transmit and receive circular buffers. |
32 | * |
33 | * This library can be used to transmit and receive data through the built in UART. |
34 | * |
35 | * An interrupt is generated when the UART has finished transmitting or |
36 | * receiving a byte. The interrupt handling routines use circular buffers |
37 | * for buffering received and transmitted data. |
38 | * |
39 | * The UART_RX_BUFFER_SIZE and UART_TX_BUFFER_SIZE constants define |
40 | * the size of the circular buffers in bytes. Note that these constants must be a power of 2. |
41 | * You may need to adapt this constants to your target and your application by adding |
42 | * CDEFS += -DUART_RX_BUFFER_SIZE=nn -DUART_RX_BUFFER_SIZE=nn to your Makefile. |
43 | * |
44 | * @note Based on Atmel Application Note AVR306 |
45 | * @author Peter Fleury pfleury@gmx.ch http://jump.to/fleury |
46 | */ |
47 | |
48 | /**@{*/
|
49 | |
50 | |
51 | #if (__GNUC__ * 100 + __GNUC_MINOR__) < 304 |
52 | #error "This library requires AVR-GCC 3.4 or later, update to newer AVR-GCC compiler !" |
53 | #endif |
54 | |
55 | |
56 | /* |
57 | ** constants and macros |
58 | */ |
59 | |
60 | /** @brief UART Baudrate Expression |
61 | * @param xtalcpu system clock in Mhz, e.g. 4000000L for 4Mhz |
62 | * @param baudrate baudrate in bps, e.g. 1200, 2400, 9600 |
63 | */ |
64 | #define UART_BAUD_SELECT(baudRate,xtalCpu) ((xtalCpu)/((baudRate)*16l)-1) |
65 | |
66 | /** @brief UART Baudrate Expression for ATmega double speed mode |
67 | * @param xtalcpu system clock in Mhz, e.g. 4000000L for 4Mhz |
68 | * @param baudrate baudrate in bps, e.g. 1200, 2400, 9600 |
69 | */ |
70 | #define UART_BAUD_SELECT_DOUBLE_SPEED(baudRate,xtalCpu) (((xtalCpu)/((baudRate)*8l)-1)|0x8000) |
71 | |
72 | |
73 | /** Size of the circular receive buffer, must be power of 2 */ |
74 | #ifndef UART_RX_BUFFER_SIZE |
75 | #define UART_RX_BUFFER_SIZE 32 |
76 | #endif |
77 | /** Size of the circular transmit buffer, must be power of 2 */ |
78 | #ifndef UART_TX_BUFFER_SIZE |
79 | #define UART_TX_BUFFER_SIZE 32 |
80 | #endif |
81 | |
82 | /* test if the size of the circular buffers fits into SRAM */ |
83 | #if ( (UART_RX_BUFFER_SIZE+UART_TX_BUFFER_SIZE) >= (RAMEND-0x60 ) ) |
84 | #error "size of UART_RX_BUFFER_SIZE + UART_TX_BUFFER_SIZE larger than size of SRAM" |
85 | #endif |
86 | |
87 | /* |
88 | ** high byte error return code of uart_getc() |
89 | */ |
90 | #define UART_FRAME_ERROR 0x0800 /* Framing Error by UART */ |
91 | #define UART_OVERRUN_ERROR 0x0400 /* Overrun condition by UART */ |
92 | #define UART_BUFFER_OVERFLOW 0x0200 /* receive ringbuffer overflow */ |
93 | #define UART_NO_DATA 0x0100 /* no receive data available */ |
94 | |
95 | |
96 | /* |
97 | ** function prototypes |
98 | */ |
99 | |
100 | /** |
101 | @brief Initialize UART and set baudrate |
102 | @param baudrate Specify baudrate using macro UART_BAUD_SELECT() |
103 | @return none |
104 | */ |
105 | extern void uart_init(unsigned int baudrate); |
106 | |
107 | |
108 | /** |
109 | * @brief Get received byte from ringbuffer |
110 | * |
111 | * Returns in the lower byte the received character and in the |
112 | * higher byte the last receive error. |
113 | * UART_NO_DATA is returned when no data is available. |
114 | * |
115 | * @param void |
116 | * @return lower byte: received byte from ringbuffer |
117 | * @return higher byte: last receive status |
118 | * - \b 0 successfully received data from UART |
119 | * - \b UART_NO_DATA |
120 | * <br>no receive data available |
121 | * - \b UART_BUFFER_OVERFLOW |
122 | * <br>Receive ringbuffer overflow. |
123 | * We are not reading the receive buffer fast enough, |
124 | * one or more received character have been dropped |
125 | * - \b UART_OVERRUN_ERROR |
126 | * <br>Overrun condition by UART. |
127 | * A character already present in the UART UDR register was |
128 | * not read by the interrupt handler before the next character arrived, |
129 | * one or more received characters have been dropped. |
130 | * - \b UART_FRAME_ERROR |
131 | * <br>Framing Error by UART |
132 | */ |
133 | extern unsigned int uart_getc(void); |
134 | |
135 | |
136 | /** |
137 | * @brief Put byte to ringbuffer for transmitting via UART |
138 | * @param data byte to be transmitted |
139 | * @return none |
140 | */ |
141 | extern void uart_putc(unsigned char data); |
142 | |
143 | |
144 | /** |
145 | * @brief Put string to ringbuffer for transmitting via UART |
146 | * |
147 | * The string is buffered by the uart library in a circular buffer |
148 | * and one character at a time is transmitted to the UART using interrupts. |
149 | * Blocks if it can not write the whole string into the circular buffer. |
150 | * |
151 | * @param s string to be transmitted |
152 | * @return none |
153 | */ |
154 | extern void uart_puts(const char *s ); |
155 | |
156 | |
157 | /** |
158 | * @brief Put string from program memory to ringbuffer for transmitting via UART. |
159 | * |
160 | * The string is buffered by the uart library in a circular buffer |
161 | * and one character at a time is transmitted to the UART using interrupts. |
162 | * Blocks if it can not write the whole string into the circular buffer. |
163 | * |
164 | * @param s program memory string to be transmitted |
165 | * @return none |
166 | * @see uart_puts_P |
167 | */ |
168 | extern void uart_puts_p(const char *s ); |
169 | |
170 | /** |
171 | * @brief Macro to automatically put a string constant into program memory |
172 | */ |
173 | #define uart_puts_P(__s) uart_puts_p(PSTR(__s)) |
174 | |
175 | |
176 | |
177 | /** @brief Initialize USART1 (only available on selected ATmegas) @see uart_init */ |
178 | extern void uart1_init(unsigned int baudrate); |
179 | /** @brief Get received byte of USART1 from ringbuffer. (only available on selected ATmega) @see uart_getc */ |
180 | extern unsigned int uart1_getc(void); |
181 | /** @brief Put byte to ringbuffer for transmitting via USART1 (only available on selected ATmega) @see uart_putc */ |
182 | extern void uart1_putc(unsigned char data); |
183 | /** @brief Put string to ringbuffer for transmitting via USART1 (only available on selected ATmega) @see uart_puts */ |
184 | extern void uart1_puts(const char *s ); |
185 | /** @brief Put string from program memory to ringbuffer for transmitting via USART1 (only available on selected ATmega) @see uart_puts_p */ |
186 | extern void uart1_puts_p(const char *s ); |
187 | /** @brief Macro to automatically put a string constant into program memory */ |
188 | #define uart1_puts_P(__s) uart1_puts_p(PSTR(__s)) |
189 | |
190 | /**@}*/ |
191 | |
192 | |
193 | #endif // UART_H |
gruß daniel
Versuchs mal mit 38400 Baud, 57,xx kBaud liegt bei 16Mhz außerhalb der empfohlenen Toleranzgrenze. PS.: Stell dich schon mal darauf ein, dass bald welche kommen und dir den Thread hier zerrupfen, weil du so viel Code zitiert hast...
Philipp schrieb: > Versuchs mal mit 38400 Baud, 57,xx kBaud liegt bei 16Mhz außerhalb der > empfohlenen Toleranzgrenze. > > PS.: Stell dich schon mal darauf ein, dass bald welche kommen und dir > den Thread hier zerrupfen, weil du so viel Code zitiert hast... Nun, also mit 38400 Klaapts ebenfalls nicht....
Hmm, vielleicht liegts an den ** im Text, sollte mich aber wundern. Ansonsten verkleiner doch mal die delays oder nimm sie ganz raus, dann lässt sich das problem ein wenig eingrenzen
Ich würde mal sagen, Dein TX Puffer ist zu klein.
Du hast einen Puffer von 32 Bytes:
#define UART_TX_BUFFER_SIZE 32
Wie lang ist Dein erster Text ?
const char *text1 = "\f\a\n Diagnose Mobile Terminal V0.1 \r\n";
1 2 3
1 2 345678901234567890123456789012345 6
Versuchs mal mit
#define UART_TX_BUFFER_SIZE 128
Außerdem liegen die Strings im RAM. Du kannst mit der Lib aber auch
Texte aus dem Flash ausgeben. Das sollte mit uart1_puts_p(PSTR("STRING
IM FLASH")) gehen.
cu
Georg
Georg W. schrieb: > Ich würde mal sagen, Dein TX Puffer ist zu klein. Dann würde aber mein vorgeschlagener Test mit "bla" "blubb" tun....
Philipp schrieb: > Hmm, vielleicht liegts an den ** im Text, sollte mich aber wundern. > Ansonsten verkleiner doch mal die delays oder nimm sie ganz raus, dann > lässt sich das problem ein wenig eingrenzen Wenn der AtMega8515 korrekt mit 16 Mhz läuft, müsste er genau 1sec bei 1000ms warten, ist nur die Frage ob er das delay erreicht oder eben nicht. Das werde ich mal testen....
1 | #include <stdlib.h> |
2 | #include <avr/io.h> |
3 | #include <avr/interrupt.h> |
4 | #include <util/delay.h> |
5 | #include "uart.h" |
6 | |
7 | #define UART_BAUD_RATE 38400 |
8 | |
9 | int main(void) |
10 | {
|
11 | |
12 | uart_init( UART_BAUD_SELECT(UART_BAUD_RATE,F_CPU) ); |
13 | |
14 | sei(); |
15 | |
16 | const char *text1 = "\f\a\n Diagnose Mobile Terminal V0.1 \r\n"; |
17 | const char *text2 = "** Kernel: 0.0.0.1\r\n"; |
18 | const char *text3 = "** Firmware: 0.0.0.1\r\n"; |
19 | while(1) |
20 | {
|
21 | uart_puts("bla\r\n");
|
22 | uart_puts("jetzt gehts zum delay!\r\n");
|
23 | _delay_ms(10); |
24 | uart_puts("blubb\r\n");
|
25 | _delay_ms(100); |
26 | uart_puts("OK\r\n");
|
27 | _delay_ms(200); |
28 | uart_puts("blaaa\r\n");
|
29 | } |
30 | } |
HTerminal:
1 | ?bla<\r><\n> |
2 | jetzt gehts zum delay!<\r><\n> (Die 10ms werden eingehalten) |
3 | blubb<\r><\n> (Auch die 100ms werden noch eingeladen= |
4 | OK<\r><\n> (Ab 200ms ist dann ende!) |
Daniel Steiner schrieb: > Das hat doch jetzt Primär mit dem Loop nichts zu tun, > Fakt ist das nach uart_puts(text1) gar nichts mehr passiert, keine > weiteren Texte! Ich habe das mal mit einem ATmega8535 auf einem STK500 probiert - und es funktioniert. Es kann also nicht am Baudfehler, an zu kleinem SRAM oder an einem Programmierfehler liegen. Probier mal ein anderes Terminalprogramm und ein anderes Kabel aus. Andererseits ist ein 16-MHz-Quarz für UART nicht ideal. Ideal für alle möglichen Baudraten sind: 1,8432 MHz, 3,6864 MHz, 7,3728 MHz, 11,0592 MHz und 14,7456 MHz viele grüße ralph
@Malte: Stimmt. Aber hat er den Test auch wirklich gemacht? @Daniel: Wie viele Zeichen gehen in 110ms bei 57600Baud und 8N1 über die RS232 raus? Mach einfach doch mal den Test mit dem TX Puffer. Ich hatte hier schon genau da selbe Problem. cu Georg
So, also mit dem Puffer auf 128 Gesetzt, aber ebenfalls leider kein Erfolg. Nun dachte ich mir teste ich das ganze mal in dem ich einfach Pro Sekunden ein "A" auf mein LCD Display zeichnen lasse...
1 | while(1) |
2 | {
|
3 | for(i=0; i< 8; i++) |
4 | {
|
5 | lcd_gotoxy(i,1); |
6 | lcd_puts("A");
|
7 | _delay_ms(1000); |
8 | } |
9 | } |
So und alles unter 100ms funktioniert, bei 1000ms hängt alles. So nun dachte ich das evtl. der Atmega ein Pfiff weg hat, ersetzt => selbiges Problem... ebenfalls schon die Kondensatoren neu eingelötet => selbes problem... Evtl. stimmt was bei den fuses nicht? Der Quarz hat die Bezeichnung 14-US16,000MHZ Danke :)
Kannst Du bitte mal schreiben, welche WinAVR-Version oder welche Version welchen Compilers sonst Du verwendest und welche Version der avr lib? Ich habe zwar keinen konkreten Anhaltspunkt, aber das delay bei 200ms noch geht und dann nicht mehr, war, glaube ich bis zu einer bestimmten Version der lib so. Habe das jetzt nicht mehr so im Kopf. Aber die Suche hier sollte einen Haufen Einträge dazu bringen.
Ausserdem muss beim Compiler die Optimierung eingeschaltet sein.
Angehängte Dateien:
-

avr-grr.JPG
140 KB -

Compiler.JPG
130 KB

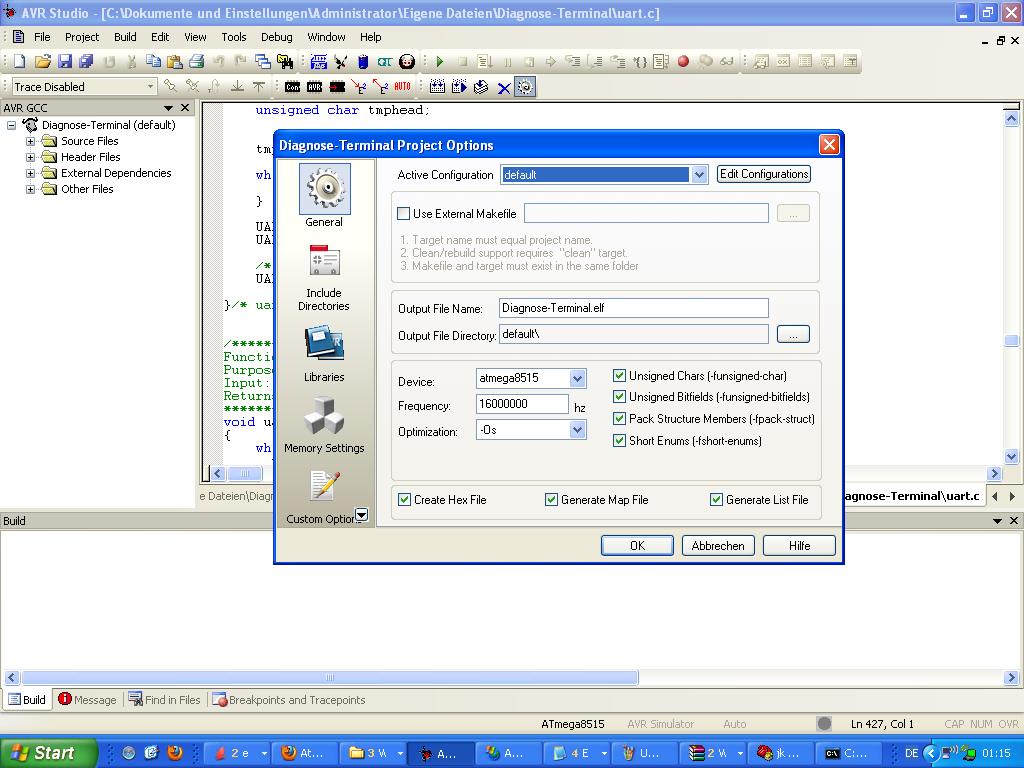
Hier mal die Einstellungen im Compiler und die aktuell Installierte WinAVR
Georg W. schrieb: > Ich würde mal sagen, Dein TX Puffer ist zu klein. Spielt keine Rolle. Die Fleury Lib ist so aufgebaut, dass das keine Rolle spielt. Schlimmstenfalls wartet die put Routine, bis vom Sendeinterrupt die ersten Zeichen rausgeblasen wurden und so Platz im Buffer geschaffen wird > Außerdem liegen die Strings im RAM. Du kannst mit der Lib aber auch > Texte aus dem Flash ausgeben. Das sollte mit uart1_puts_p(PSTR("STRING > IM FLASH")) gehen. Das hab ich eher im Verdacht. Das ihm das SRAM ausgeht. 512 Bytes sind nicht allzuviel. Obwohl es bei den delay Schleifen keine Rolle spielen sollte. Die werden komplett über Register abgewickelt. Aber ich seh eigentlich auch nichts, ausser einer möglichen SRAM Überlastung. Aber das erklärt nicht, dass es bei kleinen _delays funktioniert. Seltsam. Was sagt denn die Compiler-Statistik. Wie voll ist denn die .data Section?
Ich benutz die gleiche Compilerversion und bei mir steht in der delay.h
1 | The maximal possible delay is 262.14 ms / F_CPU in MHz. |
2 | |
3 | When the user request delay which exceed the maximum possible one, |
4 | _delay_ms() provides a decreased resolution functionality. In this |
5 | mode _delay_ms() will work with a resolution of 1/10 ms, providing |
6 | delays up to 6.5535 seconds (independent from CPU frequency). The |
7 | user will not be informed about decreased resolution. |
ich würd mir ne eigene funktion schreiben, die in ner schleife so lange _delay_ms(10) aufruft, wie du's braucht.
Karl heinz Buchegger schrieb: >> Ich würde mal sagen, Dein TX Puffer ist zu klein. > > Spielt keine Rolle. > Stimmt. Ich habe den geposteten Code mal auf einen ATMEGA8515L, der in einem STK500 mit 16MHz Quarz läuft gespielt und ich bekomme die Texte im Hyperterminal angezeigt. cu Georg
Georg W. schrieb: > Karl heinz Buchegger schrieb: > >>> Ich würde mal sagen, Dein TX Puffer ist zu klein. >> >> Spielt keine Rolle. >> > > Stimmt. > > Ich habe den geposteten Code mal auf einen ATMEGA8515L, der in einem > STK500 mit 16MHz Quarz läuft gespielt und ich bekomme die Texte im > Hyperterminal angezeigt. > > > cu > Georg Der Puffer spielt doch keinerlei Rolle, habs jetzt ebenfalls mal mit der Ausgabe auf einem LCD versucht, hat leider den selbigen Erfolg, nämlich das mehr als 100 ms nicht drin sind. (Die .data Section ist aktuell bei 32% Full. Also das Problem beschränkt sich nicht mehr nur auf das UART. Der Schaltplan zum Atmega8515 TQFP/MLF: http://www.datasheetcatalog.org/datasheet/atmel/2512S.pdf *) Hab mittlerweile nun den dritten Atmega 8515 ohne erfolg getestet. Aber ich habe die ganz normale Grundbeschaltung mit einem 16 MHZ Quarz, mit 22pF auf GND. Hab mittlerweile schon die 22pF gegen 33pF getauscht, ebenfalls schon den Quarz. JTAG ist deaktiviert, kann es eventuell sein, das evtl. ein Port belegt ist, der den Microprozessor lahm legt? Welche Ports müsste ich den Überprüfen, die den Programmablauf "irritieren" könnten? Am Atmega8515 hängt noch ein AD822, sowie noch ein RS232 Trans/Receiver, jedoch nicht von Maxim selbst. Vielen dank für Infos!
Daniel Steiner schrieb: > *) Hab mittlerweile nun den dritten Atmega 8515 ohne erfolg getestet. > > Aber ich habe die ganz normale Grundbeschaltung mit einem 16 MHZ Quarz, > mit 22pF auf GND. > > Hab mittlerweile schon die 22pF gegen 33pF getauscht, ebenfalls schon > den Quarz. > > JTAG ist deaktiviert, kann es eventuell sein, das evtl. ein Port belegt > ist, der den Microprozessor lahm legt? Kannst du dir alles sparen. Mit ziemlicher Sicherheit ist das kein Hardwareproblem.
Hast Du jetzt schon einmal in der delay.h nachgeschaut? Begrenze delay.h mal auf 200ms, das sollte klappen.
Pete K. schrieb: > Hast Du jetzt schon einmal in der delay.h nachgeschaut? > > Begrenze delay.h mal auf 200ms, das sollte klappen. Die Beschränkung auf (2hundert_irgendwas durch Taktfrequenz) ist schon lange aufgehoben. Mein WinAVR ist um einiges älter und hat mit 1000ms keinerlei Probleme. Drum verblüfft das Ganze. Man könnte das natürlich auf sich beruhen lassen, aber IMHO ist das ein Hinweis, das da irgendwas in der Konfiguration nicht ganz koscher ist. Von daher: Holzauge sei wachsam.
Es sollte auch mit 1000 gehen. Und bei einigen Leuten hier geht es ja auch. Ich würde vorschlagen einfach mal ne LED mit 1Hz zu toggeln (also 0,5Hz blinken). Alles andere rauswerfen.
Daniel Steiner schrieb: > ?bla<\r><\n> > jetzt gehts zum delay!<\r><\n> (Die 10ms werden eingehalten) > blubb<\r><\n> (Auch die 100ms werden noch eingeladen= > OK<\r><\n> (Ab 200ms ist dann ende!) Den letzten String kannst Du nicht sehen, weil das Programm beendet wird, bevor die Interrupt-Ausgabe beendet ist. Füge am Ende noch ein _delay_ms(30) ein.
Pete K. schrieb: > Daniel Steiner schrieb: > Den letzten String kannst Du nicht sehen, weil das Programm beendet > wird, bevor die Interrupt-Ausgabe beendet ist. > > Füge am Ende noch ein _delay_ms(30) ein. Das Pgm. wird nicht beendet. Da ist eine while Schleife.
Hmm.. Ich werde das mal testen und ggf. diesen Beitrag nochmal öffnen. Mich verblüfft das ganze nur, weil ich hab in jeder Schaltung die gleiche Grundbeschaltung, außer das alle Micro's i.d.R mit einem Oszi laufen, und nicht mehr mit einem Quarz. Ich werde das ganze nochmal überprüfen. Was ich aber sagen muss, die Platine war bereits schon fertig und wurde von mir "übernommen". D.h es war auf der Platine ein NXP 87xxx drauf, der mit dem Atmel 8515 TQPF Original 1:1 PIN Kompatibel ist, ebenfalls stimmen die 5,00V durch den 7085, dass kann ich auch ausschließen. Weiter kann ich nur vermuten, das irgendwas das Programm beendet, habs bereits schon mit aktiviertem WatchDog probiert, aber sobald ich die Fuse setzte, läuft garkein Programm mehr :/ Zumal mir solch ein Problem völlig neu ist, da nun von 15 AtMegas es nur jetzt diese probleme gibt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.