Bezug nehmend auf folgende Beiträge Beitrag "Re: MSP430 + RC Servo - zittern" und Beitrag "Re: Servozittern" hier meine Frage: Ist die Stabilität des internen RC-Oszillators beim MSP430 im Gegensatz zu dem eines AVR um so vieles besser? Ich komme mir irgendwie verar...t vor. mfg
Diese Angabe sollte sich im Datenblatt finden lassen.
@ Jörg S. (joerg-s)
>Diese Angabe sollte sich im Datenblatt finden lassen.
Nö. Dort steht bestenfall was von einem mittleren Frequenzfehler aber
nichts über Jitter und Kurzzeitstabilität.
Angehängte Dateien:
-

Servo_RC.PNG
4,3 KB -

Servo_Xtal.PNG
4,9 KB
Kann man leicht MESSEN, dann muss man nicht endlos philosophieren. Beitrag "Re: Servozittern" Wer es selber testen will, hier schnell das Programm, ggf. nur den OCR1A Pin anpassen, der ist nicht immer auf PB3.
1 | #include <avr/io.h> |
2 | |
3 | int main(void) { |
4 | |
5 | // OCR1A output
|
6 | DDRB = (1<<PB3); |
7 | |
8 | // timer 1 FAST PWM, WGM 14, TOP = ICR1
|
9 | TCCR1A = (1<< COM1A1) | (1<< WGM11); |
10 | TCCR1B = (1<< WGM13) | (1<< WGM12) | (1<< CS10); |
11 | ICR1 = 10000; // 20ms period @ 0,5 MHz F_CPU |
12 | OCR1A = 1000; // 2ms end position |
13 | |
14 | while (1) { |
15 | }
|
16 | }
|
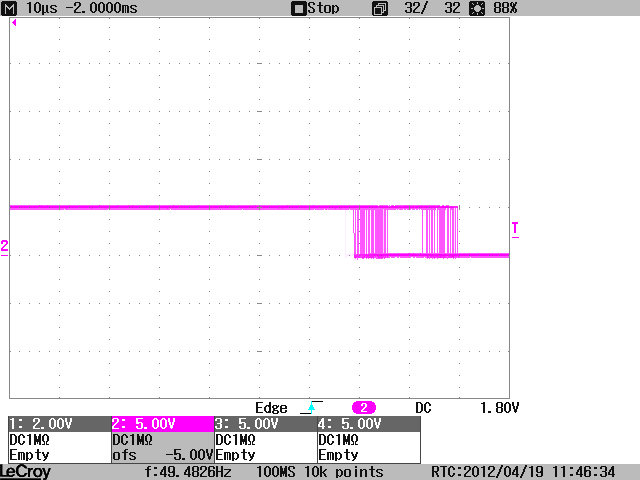
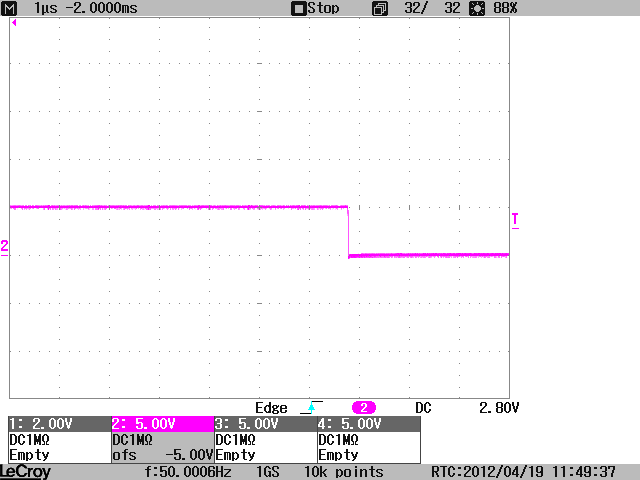
Mein ATtiny2313 liefert das, siehe Anhang. Mit 4 MHz Osziallator und DIV8 Fuse -> F_CPU = 500kHz. Der Jitter beträgt ca. 22µs, macht 1% der Pulsbreite und damit wahrscheinlich von guten Servos auflösbar. Zum Vergleich ein 4MHz Quarz, der steht 1A. Und mein Tiny läuft in einer nahezu optimalen Umgebung, gespeist von einer Batterie. Wenn da noch Störungen der Betriebsspannung dazu kommen (vom Servo), wird es sicher schlechter. Auffällig sind die beiden Bereiche, zwischen denen der RC-Oszillator hin- und herspingt. MFG Falk
** Lötlackl schrieb: > hier meine Frage: Ist die Stabilität des internen RC-Oszillators beim > MSP430 im Gegensatz zu dem eines AVR um so vieles besser? Ja. Mit den kalibrierten Konstanten für den DCO kann man zumindest asynchrone Schnittstellen fehlerfrei betreiben. Für eine Uhr würde es nicht reichen.
Wieso sollte eine RC-Oszi stabiler im MSP430 als im AVR sein? Ist doch technisch gleich realisiert? Kann das mal jemand aufklären?
@ j. c. (jesuschristus) >Wieso sollte eine RC-Oszi stabiler im MSP430 als im AVR sein? Warum ist ein Mercedes besser als ein Trabbi? Haben doch beide nur Verbrennungsmotoren. >Ist doch technisch gleich realisiert? Kann das mal jemand aufklären? Qualität heißt das Zauberwort.
@ ./. (Gast) >Mit den kalibrierten Konstanten für den DCO kann man zumindest >asynchrone Schnittstellen fehlerfrei betreiben. Das kann der AVR auch.
>Qualität heißt das Zauberwort. Aha, ist der MSP430 aus edlerem Silizium handgeschnitzt, oder was? Wo ist eine Quelle in der diese Tatsache nachgewiesen wird. Ich habe nämlich nur gelesen "ich habe die Erfahrung gemacht, dass der MSP430 stabiler ist"... Hört sich an wie: "also bei mir hat Homöopathie funktioniert"!
j. c. schrieb: >>Qualität heißt das Zauberwort. > > Aha, ist der MSP430 aus edlerem Silizium handgeschnitzt, oder was? Ob es in der Sache nun stimmt oder nicht: Man kann solche Oszillatoren unterschiedlich bauen und damit unterschiedliche Resultate bzgl. Jitter erhalten. Nur ein Beispiel: Der Einfluss der Spannungsversorgung lokal auf dem Chip. Man kann nicht pauschal davon ausgehen, dass die überall auf dem Chip aufs Millivolt perfekt kurzzeitkonstant ist, selbst wenn es die externe Versorgung sein sollte. Man kann das aber beim Chipdesign beeinflussen.
@ j. c. (jesuschristus) >>Qualität heißt das Zauberwort. >Aha, ist der MSP430 aus edlerem Silizium handgeschnitzt, oder was? Wo >ist eine Quelle in der diese Tatsache nachgewiesen wird. Kann es sein, dass du das als persönlichen Angriff betrachtest? Niemand hat behauptet, dass der MSP430 WIRKLICH besser ist. Schon gar nicht nachgewiesen. Es gibt viele Möglichkeiten, einen integrierten RC-Oszillator zu bauen, die Leistungsparameter sind dabei sicher nicht identisch. > Ich habe >nämlich nur gelesen "ich habe die Erfahrung gemacht, dass der MSP430 >stabiler ist"... Aber nicht in DIESEM Thread. >Hört sich an wie: "also bei mir hat Homöopathie funktioniert"! Eben. Alles kein Grund die Nerven zu verlieren. Es steht erstmal nur die Frage im Raum, EIN Examplar von AVR wurde vermessen, die MSP430 Fraktion ist am Zug. Oder ein anderer AVR-Nutzer misst nochmal nach, z.B. mit Servo. MFG Falk
Hi
>Oder ein anderer AVR-Nutzer misst nochmal nach, z.B. mit Servo.
Habe ich heute auch mal gemacht:
ATMega48
Int. Oszillator, 8MHz
Servosignal 1/20ms mit Timer1, Prescaler 8
Der 1ms-Impuls hat im 20min einen Jitter von 6...7µs. Servo muss aber
noch dran.
MfG Spess
Angehängte Dateien:
-

MSP430_DCO.JPG
130 KB
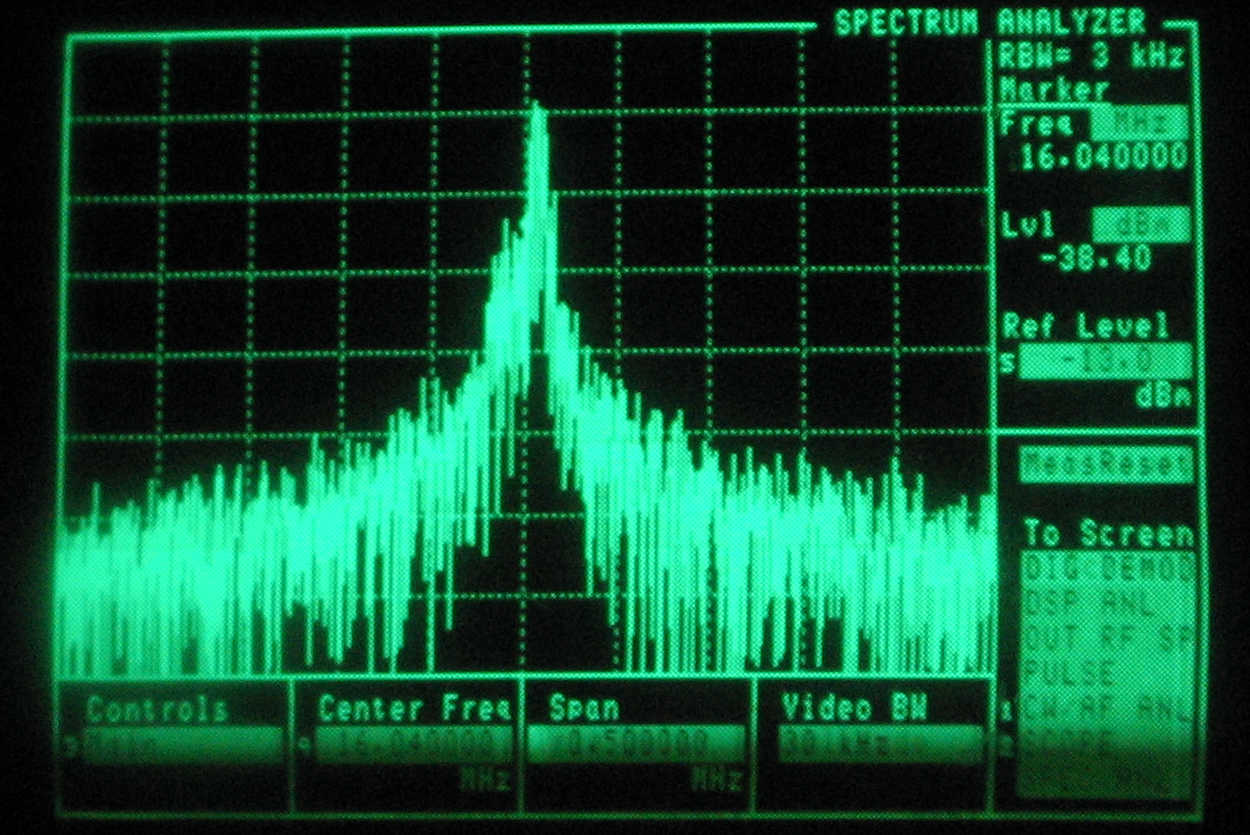
MSP430G2231: Eine mit dem internen DCO (16 MHz) erzeugte 1 ms-PWM jittert zwischen 1000,2 us bis 1000,6 us (mit HP5308A gemessen). Also etwa 400 ns. Der DCO wurde mit der Kalibriersoftware für die F2000-Serie gegen einen Uhrenquarz kalibriert. PWM-Periode: 65536 CCR1: 16050 Servo hab ich keinen :-)
Die Servomessung ist mit hoher Wahrscheinlichkeit Schott. Ich wuerde tippen, das Servo reisst auch die Speisung zusammen, und ergibt so eine positiveRueckkopplung. Der RC oszillator sollte besser sein.
./. schrieb: > Servo hab ich keinen Hast Du einen AVR für den direkten vergleich? Wäre super, wenn Du das auch hier einstellen könntest.
Dolf schrieb: > Hast Du einen AVR für den direkten vergleich? Wäre super, wenn Du das > auch hier einstellen könntest. Da müsst ich erst mein altes STK200 rauskramen. Vllt. morgen.
Ich fände es schön, wenn bei den Messungen eine einheitliche Pulsbreite genutzt würde. Falk hatte mit 2 ms begonnen, die späteren Messungen mit 1 ms Pulsbreite lasen sich damit nicht direkt vergleichen. Beim MSP430 scheint der Jitter von 1 oder 2 ms PWM Impulsen bei hoher DCO Frequenz und angepasstem Teiler und CCR-Werten kleiner als bei niedriger DCO Frequenz.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.