Hallo Leute,
ich habe heute viel über bestimmte "Do´s" and "dont´s" im VHDL Design
gelesen. Dabei war der Tenor immer wieder:
- Signale müssen einsynchronisiert werden (am besten über zwei
FlipFlops)
- reset "IMMER" synchron
zum synchronen Reset habe ich mir viel von Lothar Miller durchgelesen
und verstehe die Argumentation und halte das ganze für richtig und
sauber erklärt. Mein Professor (stammt eher aus der ASIC-Entwicklung)
hat uns allerdings auch immer erklärt, dass ein Reset generell Asynchron
zu sein hat... (PS.: Das Whitepaper von Xilinx zum Thema habe ich
bereits gelesen)
ABER: Ich habe mal nen kleines Testdesign zum einsynchronisieren
gebastelt. Die Synthese hab ich mir dann im RTL Viewer angeschaut. Ich
habe 3 Varianten getestet:
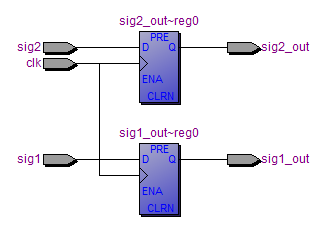
1. gar kein RESET (Bild VARIANTE 1)
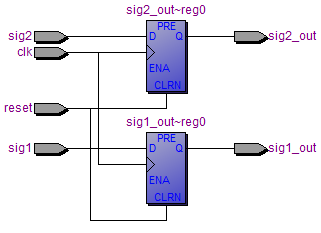
2. asynchroner RESET (Bild Variante 2)
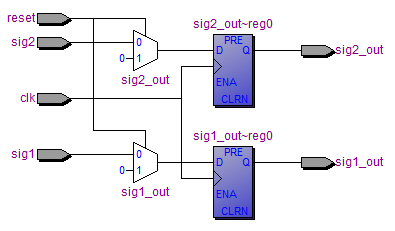
3. synchroner Reset (Bild Variante 3)
1. Frage
========
Komischerweise habe ich erwartet, dass in Variante 2/3 der Reset auf den
ClearEingang des FF geht. Dies tut er aber nur, wenn ich ihn asynchron
beschreibe. Warum?
2. Frage
========
Gibt es eine elegante Methode, die Einsynchronisierung über zwei FF
laufen zu lassen? Mir würde höchstens einfallen, die Signale zwei mal
über den von mir beschriebenen Code einzusynchronisieren. Oder reicht
die Einsych. über ein FF völlig aus?
Hier noch mein Code der drei Varianten.
Jochen schrieb:> Komischerweise habe ich erwartet, dass in Variante 2/3 der Reset auf den> ClearEingang des FF geht. Dies tut er aber nur, wenn ich ihn asynchron> beschreibe. Warum?
Da kann es mehrere Gründe geben. Der übliche ist, dass die Toolchain den
Set/Reset über die LUT nachbildet, um damit ein sogenanntes
"control-set" zu sparen. Vom Verhalten, welches du beschrieben hast, ist
es absolut identisch.
Jochen schrieb:> Oder reicht> die Einsych. über ein FF völlig aus?
Geht genauso, hängt lediglich davon ab, wie hoch die
Restwahrscheinlichkeit sein soll, dass es mal nicht geht. Das
Einsynchronisieren hat 2 Aufgaben
1) für die Metastabilität sorgen (bei aktuellen FPGAs grob gesagt erst
ab 200MHz relevant). Je höher die Frequenz desto mehr FFs in Reihe
benötigst du. Evtl. auch mal mehr wie 2 FFs.
2) dafür zu sorgen, dass, wenn das Signal an mehrere FF geht, alle das
gleiche Signal sehen, Stichpunkt Laufzeitunterschiede zu den
State-Machine-FFs. Für diesen Fall genügt 1 FF völlig.
gruß
daniel__m schrieb:> Da kann es mehrere Gründe geben. Der übliche ist, dass die Toolchain den> Set/Reset über die LUT nachbildet, um damit ein sogenanntes> "control-set" zu sparen. Vom Verhalten, welches du beschrieben hast, ist> es absolut identisch.
Ah, ok... Wieder völlig neue Begriffe für mich. Was ist ein
"Control-set" genau? Bedeutet das, dass die Toolchain das macht, um das
Clear nicht nutzen zu müssen? Ist der vorgeschaltete Mux nicht
aufwändiger?
Danke für deine Antwort!
Jochen schrieb:> Komischerweise habe ich erwartet, dass in Variante 2/3 der Reset auf den> ClearEingang des FF geht. Dies tut er aber nur, wenn ich ihn asynchron> beschreibe. Warum?
Welche Zielplattform verwendest du?
Für den Spartan3 gilt das, was im
Beitrag "Re: Hardware mit VHDL "richtig" beschreiben." untersucht wurde, bei
nachfolgenden FPGA-Generationen hat sich da durchaus was geändert (und
es ist auch ein Unterschied, ob ich V6 oder S6 verwende), und auch bei
anderen Herstellen lohnt es sich, solche Grundlagenfragen vorab an ein
paar kleinen Dreizeilern zu untersuchen (so, wie du es hier offenbar
machst).
Als Tipp: bei Xilinx heißen synchrone Signale Reset und Set, asynchrone
Signale heißen Clear und Preset.
> Mein Professor hat uns allerdings auch immer erklärt, dass ein Reset> generell Asynchron zu sein hat...
Ja, schade nur, dass man mit solchen Verallgemeinerungen evtl. die
Ressourcen des Bausteins nicht gut ausnützt...
Hallo Lothar,
Lothar Miller schrieb:> Welche Zielplattform verwendest du?
Daheim verwende ich einen Cyclone III C6
Auf der Arbeit verwende ich im Rahmen meiner Masterthesis einen ArriaV.
Zielplattform wird dann aber ein StratixV sein.
Lothar Miller schrieb:>> Mein Professor hat uns allerdings auch immer erklärt, dass ein Reset>> generell Asynchron zu sein hat...> Ja, schade nur, dass man mit solchen Verallgemeinerungen evtl. die> Ressourcen des Bausteins nicht gut ausnützt..
Ich werde auf jeden Fall "alle" Signale einsynchronisieren, da mir deine
Argumentation als logisch erscheint. Danke dir.
Hast du evtl. dazu auch einen Tipp?`Wäre super (PS.: Post#2 ist
relevant)
Beitrag "Simulation - Bei Abtastung anliegendes Signal übernehmen"
Jochen schrieb:> Cyclone III C6 ... StratixV
Da passt natürlich ein Xilinx Whitepaper wie die Faust aufs legendäre
Auge... ;-)
> Ich werde auf jeden Fall "alle" Signale einsynchronisieren
Es hat keinen Sinn, z.B. 32 Bits eines Busses einzutakten. Hier muss ein
anderer Synchronisationsmechanismus her. IdR. ist das dann ein Write-
oder Latch-Signal...
Lothar Miller schrieb:>> Cyclone III C6 ... StratixV> Da passt natürlich ein Xilinx Whitepaper wie die Faust aufs legendäre> Auge... ;-)
Ja, natürlich nicht... eigentlich. Aber ich denke, dass die Unterschiede
nicht so groß sein werden?!?! Vom Prinzip her ist die Grundlage, die
dahinter steht doch die gleiche?!?!
Lothar Miller schrieb:> Es hat keinen Sinn, z.B. 32 Bits eines Busses einzutakten. Hier muss ein> anderer Synchronisationsmechanismus her. IdR. ist das dann ein Write-> oder Latch-Signal...
Interessant. Hast du dazu evtl. auch schon einen kleinen Artikel
verfasst?
Jochen schrieb:>> Es hat keinen Sinn, z.B. 32 Bits eines Busses einzutakten. Hier muss ein>> anderer Synchronisationsmechanismus her. IdR. ist das dann ein Write->> oder Latch-Signal...>> Interessant. Hast du dazu evtl. auch schon einen kleinen Artikel> verfasst?
Dazu brauchts keinen Artikel. Das Einsynchronisieren ist nur bei
unabhängigen Signalen sinnvoll, da Du nicht vorhersehen kannst ob der
"richtige" Wert jedes einzelnen Signals bereits im ersten oder erst im
zweiten Zyklus übernommen wurde.
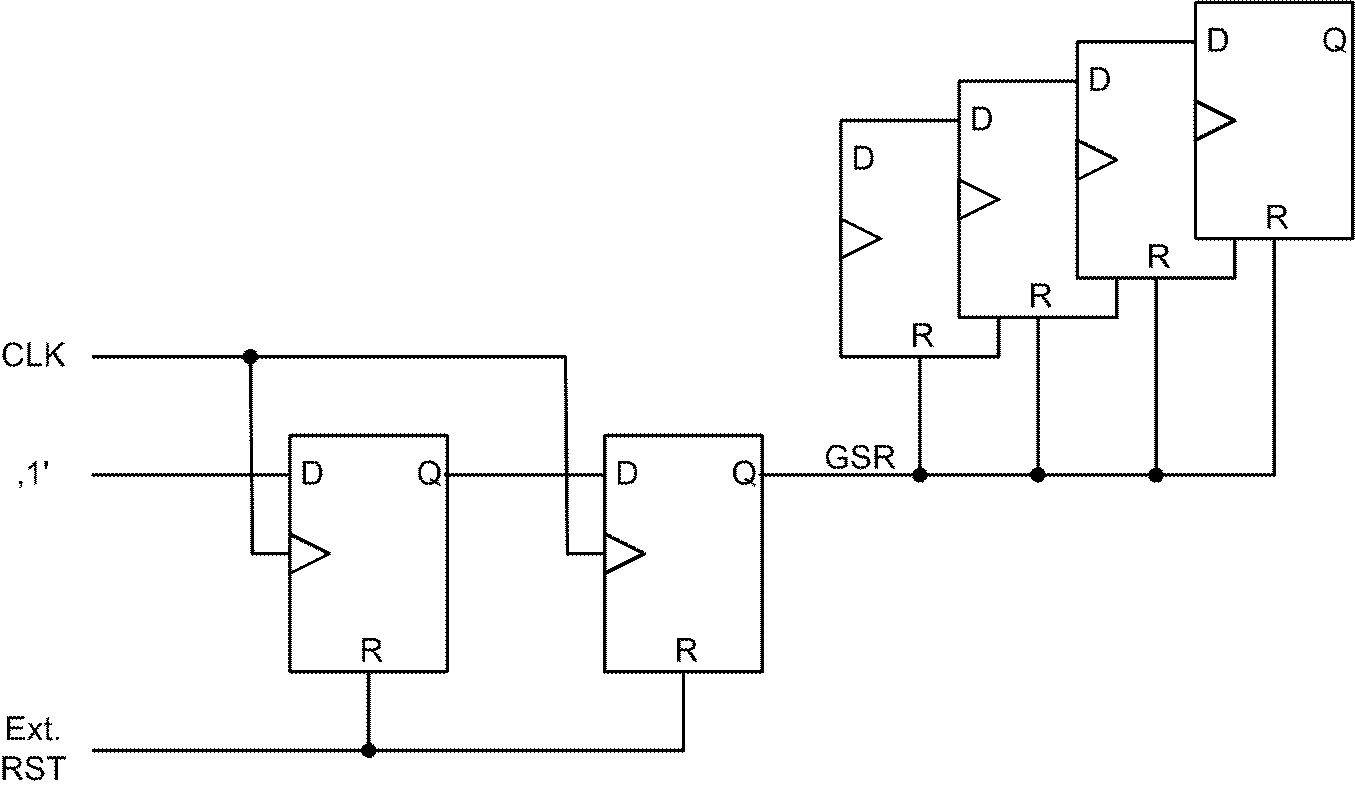
Ich generiere den globalen Reset immer wie im Anhang gezeigt.
Asynchroner Reset und synchrones "Wegnehmen" des Resets.
Dieses zentral erzeugte Reset-Signal wird über GSR an alle asynchronen
Resets der Register des Designs geführt.
Jochen schrieb:> Mein Professor (stammt eher aus der ASIC-Entwicklung)> hat uns allerdings auch immer erklärt, dass ein Reset generell Asynchron> zu sein hat...
Vielleicht meinte er, dass man ihn als asynchron anzusehen hat, denn so
macht die Aussage keinen Sinn.
Marcus Harnisch schrieb:>>> Es hat keinen Sinn, z.B. 32 Bits eines Busses einzutakten. Hier muss ein>>> anderer Synchronisationsmechanismus her. IdR. ist das dann ein Write->>> oder Latch-Signal...>> Interessant. Hast du dazu evtl. auch schon einen kleinen Artikel>> verfasst?> Dazu brauchts keinen Artikel. Das Einsynchronisieren ist nur bei> unabhängigen Signalen sinnvoll
Und ein Signal auf einem Datenbus ist nicht unabhängig. Sondern es
hängt von irgendwelchen Steuersignalen ab. Deshalb muss man das
Steuersignal abtasten und abhängig von diesem einzigen
einsynchronisiserten Signal dann die 32 Bits Daten einlesen.
Lothar Miller schrieb:> Und ein Signal auf einem Datenbus ist nicht unabhängig. Sondern es> hängt von irgendwelchen Steuersignalen ab. Deshalb muss man das> Steuersignal abtasten und abhängig von diesem einzigen> einsynchronisiserten Signal dann die 32 Bits Daten einlesen.
Hmm... Das heißt also für mein reales Problem:
Ich bekomme pro Takt vom Avalon-ST Bus ein Signal mit 64 Bit. Dazu gibt
es ein Valid Signal. Wenn das '1' ist, kann ich die Daten übernehmen.
Daraus folgt:
Ich synchronisiere das Validsignal ein und nehme die Daten bei der
steigenden Flanke des Takts wenn Valid = '1'. Der Takt der Daten und der
Übernahmetakt meines Designs sind gleich (bzw. bekomme ich den Takt vom
Avalon ST)
Das ist aber hier kein "Einsynchronisieren" wie es üblicherweise
verstanden wird, sondern Du nutzt doch ein bereits synchrones Signal.
Der Avalon Mechanismus ist doch IM FPGA und nicht extern. Das valid ist
ein ganz normales enable.
Juergen Schuhmacher schrieb:> er Avalon Mechanismus ist doch IM FPGA und nicht extern. Das valid ist> ein ganz normales enable.
Stimmt... Man, ich glaub es reicht erstmal.
Ich danke euch, für die vielen Antworten. Hab wirklich viel dabei
gelernt. Ich wünsch euch nun ein schönes Wochenende!
Wenn der Quell- und Zieltakt wirklich identisch sind, also die gleiche
Takt Quelle haben, dann kannst du dir das Ein takten sparen.
Du musst dann der Synthese nur in Form von Constraints mitteilen, in
welchem Phasenbezug der Takt und die Daten am FPGA stehen.
Jochen Peters aus München schrieb:> Ich bekomme pro Takt vom Avalon-ST Bus ein Signal mit 64 Bit. Dazu gibt> es ein Valid Signal. Wenn das '1' ist, kann ich die Daten übernehmen.
Soweit richtig.
> Daraus folgt:> Ich synchronisiere das Validsignal ein
Das ist unnötig, weil der Avalon-Bus bereits synchron zum "eigenen" Takt
ist. Und wenn dieser Takt auch der Takt deines Systems ist, dann ist
schon alles synchron und du musst nur noch mit der steigenden Flanke auf
valid='1' abfragen:
1
process(clk)begin
2
ifvalid='1'then-- valid ist synchron zum Takt
3
mydata<=avalondata;-- und sogar die Daten sind synchron zum Takt,
4
endif;-- mindestens aber stabil, wenn valid='1' ist